Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (14): 629379-629379.doi: 10.7527/S1000-6893.2023.29379
• special column • Previous Articles Next Articles
Zhaochen CHU, Tao SONG, Ren JIN( ), Defu LIN
), Defu LIN
Received:2023-07-28
Revised:2023-08-22
Accepted:2023-11-08
Online:2024-07-25
Published:2023-12-07
Contact:
Ren JIN
E-mail:renjin@bit.edu.cn
Supported by:CLC Number:
Zhaochen CHU, Tao SONG, Ren JIN, Defu LIN. Vision-based air-to-air multi-UAVs tracking[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 629379-629379.

Fig.1
Framework of multi-UAVs tracking algorithm based on block enhancement and local geometric cascade association

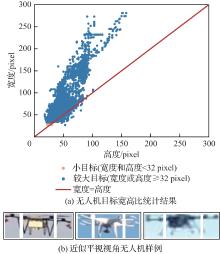
Fig.2
UAV object’s width and height ratio statistics and some UAV object samples with approximately flat view in DUT Anti-UAV Tracking dataset
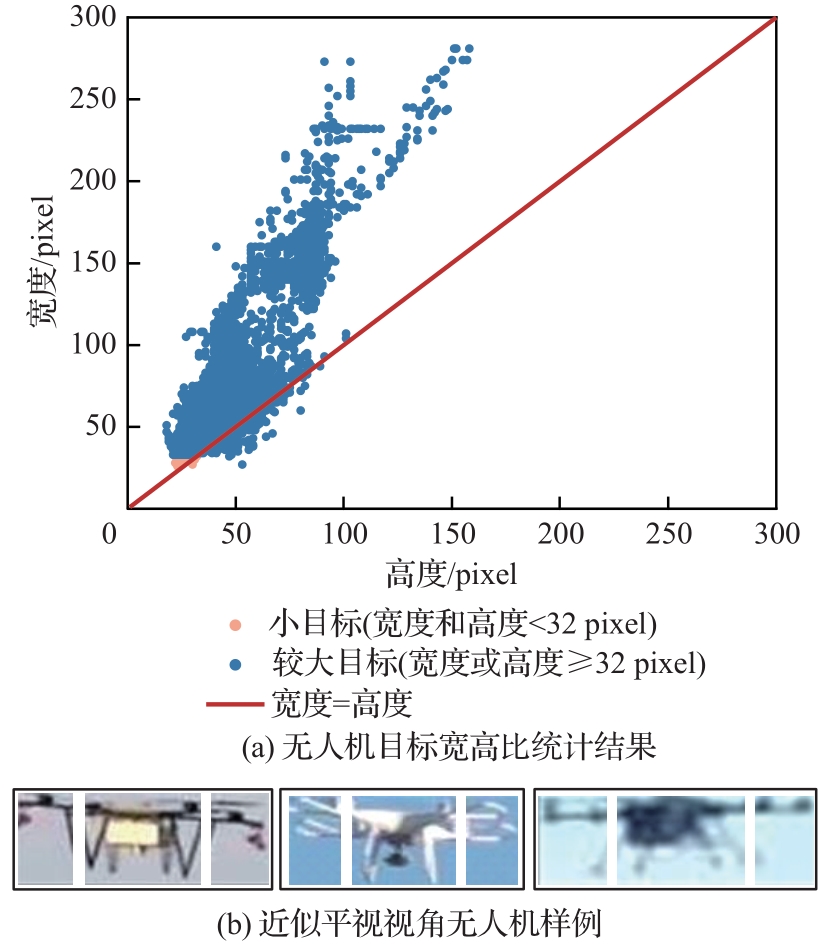

Fig.3
UAV object feature extraction component based on block enhancement


Fig.4
Local geometric association
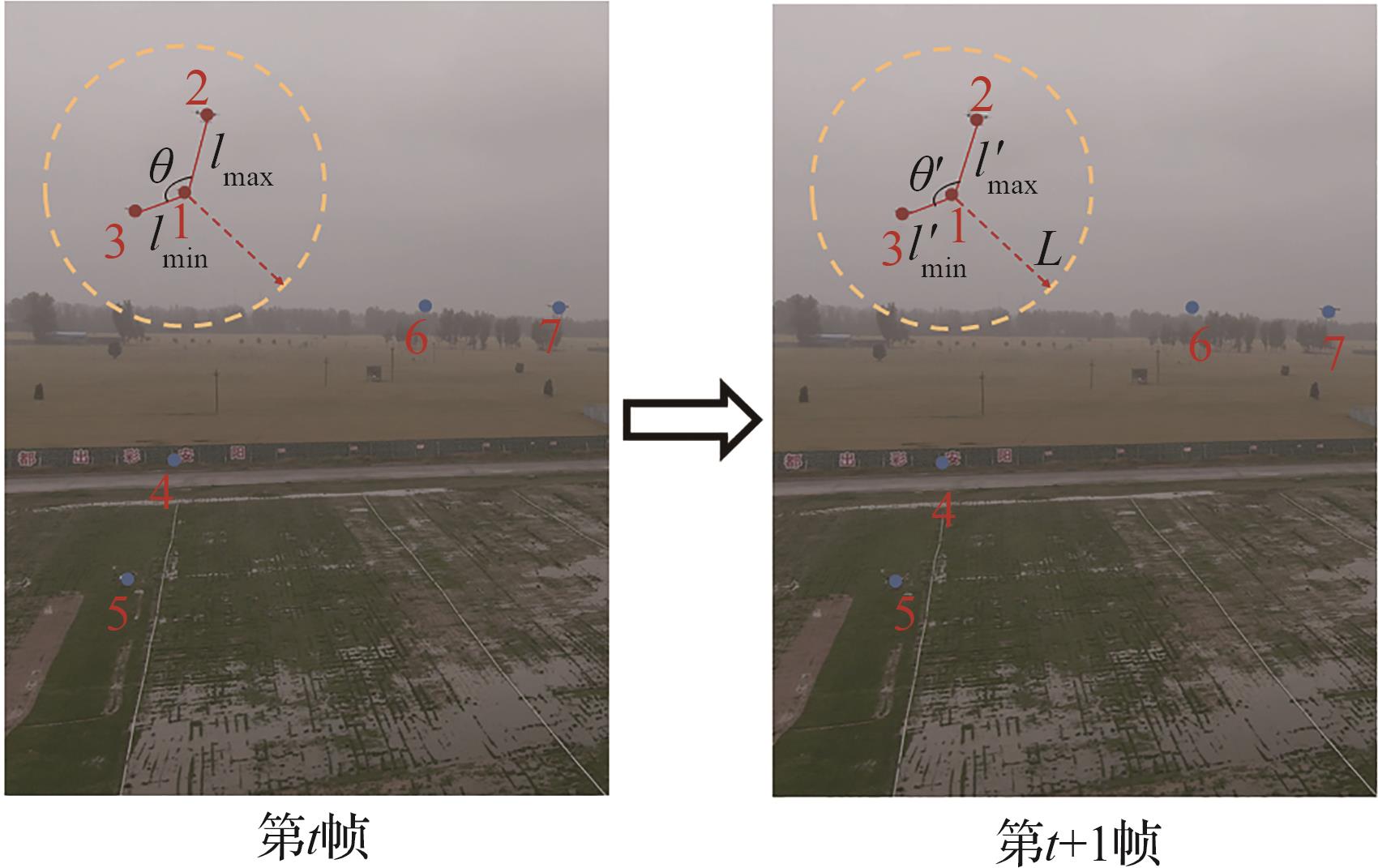

Fig.5
Cascade data association framework based on block feature enhancement and local geometric association
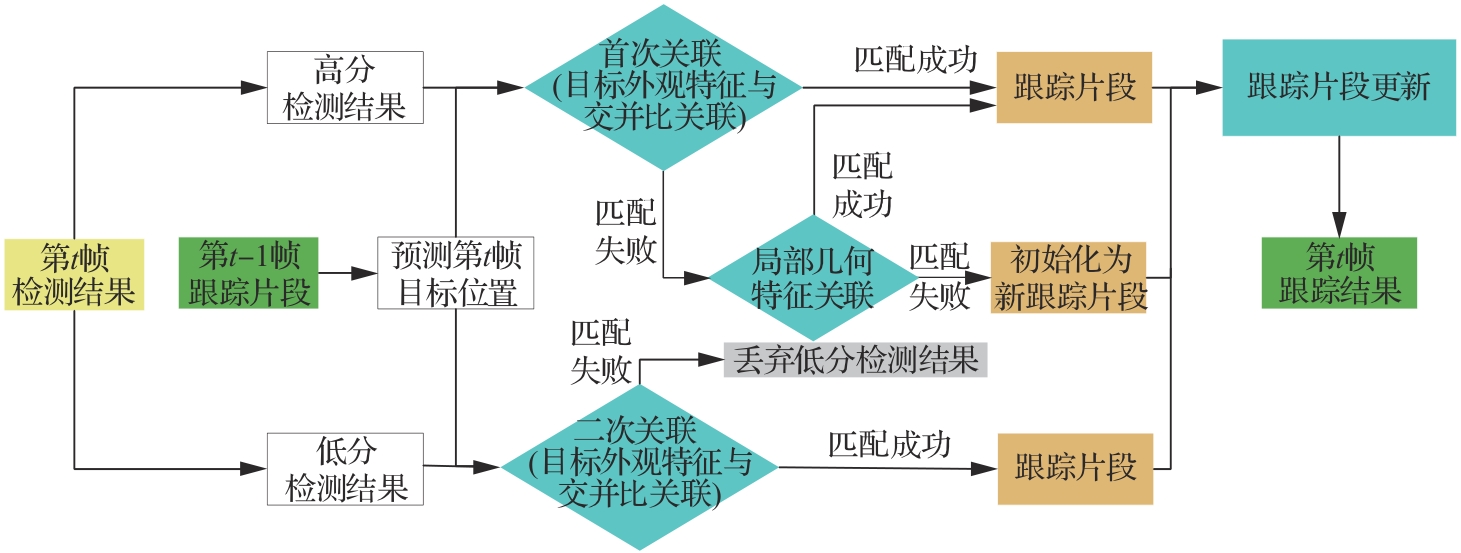

Fig. 6
Precision-recall curves of block enhancement feature extraction component and ResNet series networks for 8 types of UAV objects inference
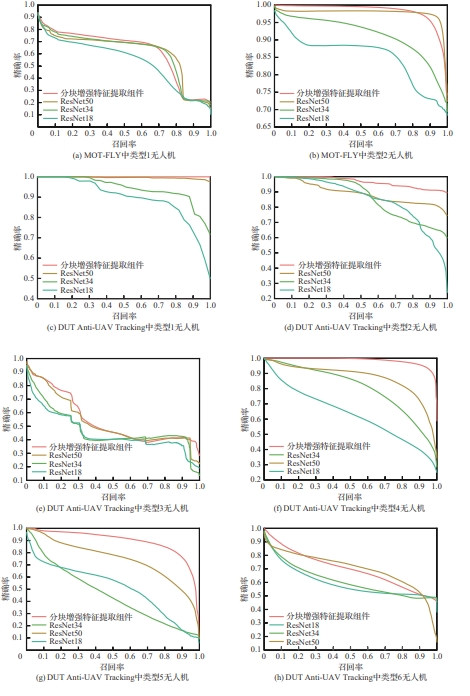

Fig.7
Some UAV samples in MOT-FLY and DUT Anti-UAV Tracking

Table 1
Experimental results of feature extraction components on different re-identification datasets
| 特征提取组件 | mAP/% | |
|---|---|---|
| MOT-FLY | DUT Anti-UAV Tracking | |
| ResNet18 | 62.0 | 53.0 |
| ResNet34 | 65.4 | 56.8 |
| ResNet50 | 68.8 | 60.3 |
| ResNet18-BE | 62.7 | 58.9 |
| ResNet34-BE | 67.0 | 65.7 |
| ResNet50-BE | 69.6 | 66.8 |
Table 2
Experimental results of feature extraction components on MOT-FLY test set
| 关联算法 | IDs | IDF1/% | MOTA/% |
|---|---|---|---|
| DeepSORT-ResNet18 | 534 | 43.0 | 42.0 |
| DeepSORT-ResNet34 | 515 | 43.5 | 42.3 |
| DeepSORT-ResNet50 | 499 | 44.1 | 42.5 |
| DeepSORT-BEFE | 329 | 48.3 | 44.0 |
| Tracktor-ResNet18 | 114 | 41.1 | 32.9 |
| Tracktor-ResNet34 | 111 | 41.3 | 33.4 |
| Tracktor-ResNet50 | 106 | 41.0 | 33.9 |
| Tracktor-BEFE | 81 | 41.4 | 35.9 |
Table 3
Performance of feature extraction component with different splitting ratios along with direction under different datasets
| 特征提取组件 | mAP/% | |
|---|---|---|
| MOT-FLY | DUT Anti-UAV Tracking | |
| ResNet50-BE( | 64.9 | 61.9 |
| ResNet50-BE( | 69.6 | 66.8 |
| ResNet50-BE( | 68.4 | 64.0 |
Table 4
Impact of local area radius on Byte association algorithm tracking performance in MOT-FLY test set
| 关联算法 | 局部区域半径/pixel | IDs | IDF1/% | MOTA/% |
|---|---|---|---|---|
| Byte-LGA | 100 | 85 | 58.5 | 48.3 |
| Byte-LGA | 200 | 79 | 58.7 | 48.5 |
| Byte-LGA | 500 | 75 | 59.1 | 48.5 |
| Byte-LGA | 1 000 | 85 | 58.6 | 48.4 |
| Byte-LGA | 2 000 | 87 | 58.3 | 48.3 |
Table 5
Experimental results of local geometric association algorithm on MOT-FLY test set
| 关联算法 | 检测组件 | IDs | IDF1/% | MOTA/% |
|---|---|---|---|---|
| SORT | FRCNN | 554 | 33.1 | 42.0 |
| DeepSORT | FRCNN | 499 | 44.1 | 42.5 |
| Byte | FRCNN | 115 | 58.3 | 48.0 |
| SORT+LGA | FRCNN | 263 | 37.7 | 44.6 |
| DeepSORT+LGA | FRCNN | 143 | 46.7 | 45.6 |
| Byte+LGA | FRCNN | 75 | 59.1 | 48.5 |
Table 6
Experimental results of cascade data association framework on MOT-FLY test set
| 算法 | 检测组件 | BEFE | LGA | IDs | IDF1/% | MOTA/% |
|---|---|---|---|---|---|---|
| Baseline | FRCNN | 115 | 58.3 | 48.0 | ||
| Baseline+BEFE | FRCNN | √ | 75 | 58.9 | 48.6 | |
| Baseline+BELGCA | FRCNN | √ | √ | 57 | 59.0 | 48.9 |

Fig.8
DJI_0281 sequence tracking results in MOT-FLY test set using Baseline+BELGCA and Baseline algorithm
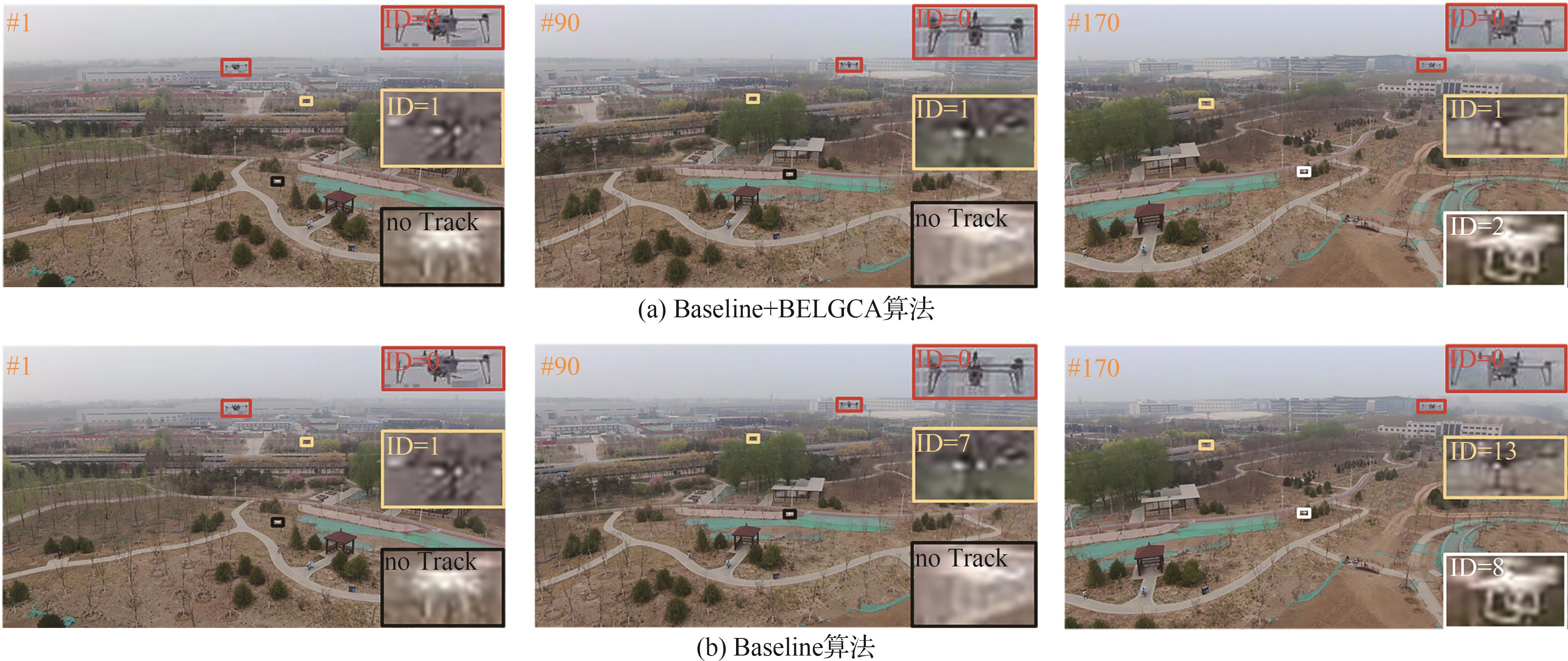

Fig.9
DJI_0288 sequence tracking results in MOT-FLY test set using Baseline+BELGCA and Baseline algorithm
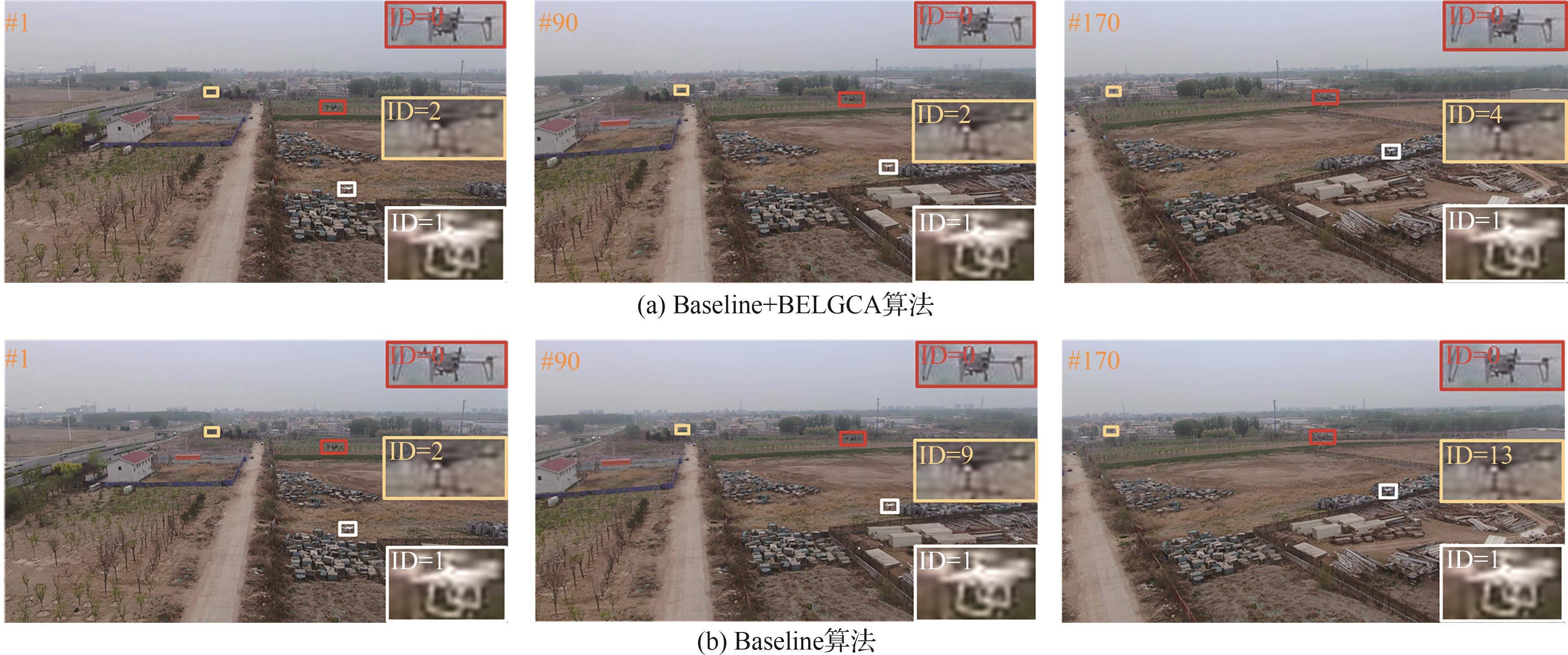
Table 7
Comparison of proposed algorithm with current popular multi-object tracking algorithms
| 算法 | IDs | IDF1/% | MOTA/% | FPS |
|---|---|---|---|---|
| CenterTrack | 48 | 38.2 | 36.6 | 39.2 |
| CTracker | 153 | 36.3 | 34.7 | 12.1 |
| FairMOT | 53 | 39.8 | 38.5 | 46.0 |
| DeepSORT | 708 | 41.0 | 43.0 | 44.4 |
| ByteTrack | 85 | 56.7 | 49.0 | 53.1 |
| OC-SORT | 58 | 53.0 | 50.2 | 53.5 |
| BELGTracker | 57 | 58.6 | 51.7 | 46.9 |
Table 8
Inference speed of proposed algorithm on NVIDIA Jetson Xavier NX
| 算法 | FPS |
|---|---|
| BELGTracker-ResNet18-BE | 28.0 |
| BELGTracker-ResNet34-BE | 27.2 |
| BELGTracker-ResNet50-BE | 24.5 |
| 1 | 陈琳, 刘允刚. 面向无人机的视觉目标跟踪算法:综述与展望[J]. 信息与控制, 2022, 51(1): 23-40. |
| CHEN L, LIU Y G. UAV visual target tracking algorithms: Review and future prospect[J]. Information and Control, 2022, 51(1): 23-40 (in Chinese). | |
| 2 | 闫超, 涂良辉, 王聿豪,等. 无人机在我国民用领域应用综述[J]. 飞行力学, 2022, 40(3): 1-6. |
| YAN C, TU L H, WANG Y H, et al. Application of unmanned aerial vehicle in civil field in China[J]. Flight Dynamics, 2022, 40(3): 1-6 (in Chinese). | |
| 3 | 李仕帆. 无人机在消防灭火救援工作中的运用实践探讨[J]. 中国设备工程, 2023(8): 8-10. |
| LI S F. Practical discussion on the utilization of UAVs in fire fighting and rescue work[J]. China Plant Engineering, 2023(8): 8-10 (in Chinese). | |
| 4 | 李浩, 孙合敏, 李宏权, 等. 无人机集群蜂群作战综述及其预警探测应对策略[J]. 飞航导弹, 2018(11): 46-51. |
| LI H, SUN H M, LI H Q, et al. Overview of UAV cluster swarm combat and its early warning detection response strategy[J]. Aerodynamic Missile Journal, 2018(11): 46-51 (in Chinese). | |
| 5 | 刘雷, 刘大卫, 王晓光,等. 无人机集群与反无人机集群发展现状及展望[J]. 航空学报, 2022, 43(S1): 726908. |
| LIU L, LIU D W, WANG X G,et al. Development status and outlook of UAV clusters and anti-UAV clusters[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(S1): 726908 (in Chinese). | |
| 6 | WANG C Y, SU Y, WANG J J, et al. UAVSwarm dataset: An unmanned aerial vehicle swarm dataset for multiple object tracking[J]. Remote Sensing, 2022, 14(11): 2601. |
| 7 | 张洲宇, 曹云峰, 范彦铭. 低空小型无人机空域冲突视觉感知技术研究进展[J]. 航空学报, 2022, 43(8): 025645. |
| ZHANG Z Y, CAO Y F, FAN Y M. Research progress of vision based aerospace conflict sensing technologies for small unmanned aerial vehicle in low altitude[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(8): 025645 (in Chinese). | |
| 8 | 薛远亮, 金国栋, 谭力宁, 等. 基于多尺度融合的自适应无人机目标跟踪算法[J]. 航空学报, 2023, 44(1): 326107. |
| XUE Y L, JIN G D, TAN L N, et al. Adaptive UAV target tracking algorithm based on multi-scale fusion[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(1): 326107 (in Chinese). | |
| 9 | 刘芳, 孙亚楠. 基于自适应融合网络的无人机目标跟踪算法[J]. 航空学报, 2022, 43(7): 325522. |
| LIU F, SUN Y N. UAV target tracking algorithm based on adaptive fusion network[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(7): 325522 (in Chinese). | |
| 10 | 刘贞报, 马博迪, 高红岗, 等. 基于形态自适应网络的无人机目标跟踪方法[J]. 航空学报, 2021, 42(4): 524904. |
| LIU Z B, MA B D, GAO H G, et al. Adaptive morphological network based UAV target tracking algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 524904 (in Chinese). | |
| 11 | DU Y H, WAN J F, ZHAO Y Y, et al. GIAOTracker: A comprehensive framework for MCMOT with global information and optimizing strategies in VisDrone 2021[C]∥2021 IEEE/CVF International Conference on Computer Vision Workshops. Piscataway: IEEE Press, 2021: 2809-2819. |
| 12 | SHEN H Y, HUANG Z Y, WANG H C, et al. Adaptive update of UAV multi-target tracking based on Transformer[C]∥2023 IEEE 6th Information Technology, Networking, Electronic and Automation Control Conference. Piscataway: IEEE Press, 2023: 6-13. |
| 13 | WANG G A, GU R S, LIU Z Z, et al. Track without appearance: Learn box and tracklet embedding with local and global motion patterns for vehicle tracking[C]∥2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2021: 9856-9866. |
| 14 | WU H, NIE J H, HE Z W, et al. One-shot multiple object tracking in UAV videos using task-specific fine-grained features[J]. Remote Sensing, 2022, 14(16): 3853. |
| 15 | 罗茜, 赵睿, 庄慧珊, 等. YOLOv5与Deep-SORT联合优化的无人机多目标跟踪算法[J]. 信号处理, 2022, 38(12): 2628-2638. |
| LUO X, ZHAO R, ZHUANG H S, et al. UAV multi-target tracking algorithm jointly optimized by YOLOv5 and Deep-SORT[J]. Journal of Signal Processing, 2022, 38(12): 2628-2638 (in Chinese). | |
| 16 | 刘芳, 浦昭辉, 张帅超. 基于注意力特征融合的无人机多目标跟踪算法[J]. 控制与决策, 2023, 38(2): 345-353. |
| LIU F, PU Z H, ZHANG S C. UAV multi-target tracking algorithm based on attention feature fusion[J]. Control and Decision, 2023, 38(2): 345-353 (in Chinese). | |
| 17 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]∥Proceedings of the 31st International Conference on Neural Information Processing Systems. New York: ACM, 2017: 6000-6010. |
| 18 | ZHANG Y F, WANG C Y, WANG X G, et al. FairMOT: On the fairness of detection and re-identification in multiple object tracking[J]. International Journal of Computer Vision, 2021, 129(11): 3069-3087. |
| 19 | ZHAO J, ZHANG J S, LI D D, et al. Vision-based anti-UAV detection and tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 25323-25334. |
| 20 | CAO Z A, HUANG Z Y, PAN L, et al. TCTrack: Temporal contexts for aerial tracking[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2022: 14778-14788. |
| 21 | LI Y M, FU C H, DING F Q, et al. AutoTrack: Towards high-performance visual tracking for UAV with automatic spatio-temporal regularization[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2020: 11920-11929. |
| 22 | JIANG X L, LI P Z, LI Y J, et al. Graph neural based end-to-end data association framework for online multiple-object tracking[DB/OL]. arXiv preprint: 1907.05315, 2019. |
| 23 | ZHANG Y F, SUN P Z, JIANG Y, et al. ByteTrack: Multi-object tracking by associating every detection box[C]∥European Conference on Computer Vision. Cham: Springer, 2022: 1-21. |
| 24 | LUO W H, XING J L, MILAN A, et al. Multiple object tracking: A literature review[J]. Artificial Intelligence, 2021, 293: 103448. |
| 25 | WOJKE N, BEWLEY A, PAULUS D. Simple online and realtime tracking with a deep association metric[C]∥2017 IEEE International Conference on Image Processing. Piscataway: IEEE Press, 2017: 3645-3649. |
| 26 | DOSOVITSKIY A, BEYER L, KOLESNIKOV A, et al. An image is worth 16x16 words: Transformers for image recognition at scale[DB/OL]. arXiv preprint: 2010.11929, 2020. |
| 27 | REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 28 | BERGMANN P, MEINHARDT T, LEAL-TAIXÉ L. Tracking without bells and whistles[C]∥2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2019: 941-951. |
| 29 | BEWLEY A, GE Z Y, OTT L, et al. Simple online and realtime tracking[C]∥2016 IEEE International Conference on Image Processing. Piscataway: IEEE Press, 2016: 3464-3468. |
| 30 | CAO J K, PANG J M, WENG X S, et al. Observation-centric SORT: Rethinking SORT for robust multi-object tracking[C]∥2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2023: 9686-9696. |
| 31 | ZHOU X Y, KOLTUN V, KRÄHENBÜHL P. Tracking objects as points[C]∥European Conference on Computer Vision. Cham: Springer, 2020: 474-490. |
| 32 | PENG J L, WANG C G, WAN F B, et al. Chained-tracker: Chaining paired attentive regression results for end-to-end joint multiple-object detection and tracking[C]∥European Conference on Computer Vision. Cham: Springer, 2020: 145-161. |
| 33 | GE Z, LIU S T, WANG F, et al. YOLOX: Exceeding YOLO series in 2021[DB/OL]. arXiv preprint: 2107.08430, 2021. |
| 34 | BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: Optimal speed and accuracy of object detection[DB/OL]. arXiv preprint: 2004.10934, 2020. |
| 35 | ZHANG H Y, CISSE M, DAUPHIN Y N, et al. Mixup: Beyond empirical risk minimization[DB/OL]. arXiv preprint: 1710.09412, 2017. |
| 36 | GE Z, LIU S T, LI Z M, et al. OTA: Optimal transport assignment for object detection[C]∥2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2021: 303-312. |
| 37 | WANG C Y, MARK LIAO H Y, WU Y H, et al. CSPNet: A new backbone that can enhance learning capability of CNN[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE Press, 2020: 1571-1580. |
| 38 | LIU S, QI L, QIN H F, et al. Path aggregation network for instance segmentation[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 8759-8768. |
| 39 | REZATOFIGHI H, TSOI N, GWAK J Y, et al. Generalized intersection over union: A metric and a loss for bounding box regression[C]∥2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2019: 658-666. |
| [1] | Jiaqi LIU, Rongqian CHEN, Jinhua LOU, Xu HAN, Hao WU, Yancheng YOU. Aerodynamic shape optimization of high-speed helicopter rotor airfoil based on deep learning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 529828-529828. |
| [2] | Xudong LUO, Yiquan WU, Jinlin CHEN. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 28822-028822. |
| [3] | Gaojie ZHENG, Xiaoming HE, Dongpo LI, Huijun TAN, Kun WANG, Zhenlong WU, Depeng WANG. Double 90° deflection inlet/volute coupling flow characteristics of tail-powered unmanned aerial vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 128782-128782. |
| [4] | Haiqiao LIU, Meng LIU, Zichao GONG, Jing DONG. A review of image matching methods based on deep learning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(3): 28796-028796. |
| [5] | Junyu LI, Qiankun LIU, Ying FU. Infrared small object detection based on attention mechanism [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 628959-628959. |
| [6] | Kunda LIU, Xueming LIU, Bo ZHU, Qingrui ZHANG. Robust safe control for multi⁃UAV formation flight through narrow corridors [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729768-729768. |
| [7] | Xin SU, Runcheng GUAN, Qiao WANG, Weizheng YUAN, Xianglian LYU, Yang HE. Ice area and thickness detection method based on deep learning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729283-729283. |
| [8] | Liqun CHEN, Xu ZOU, Lei ZHANG, Yingpan ZHU, Gang WANG, Jinyong CHEN. On⁃board intelligent target detection technology based on domestic commercial components [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 728860-728860. |
| [9] | Pengyu LIU, Xueyao ZHU. Semantic parsing technology of air traffic control instruction in fusion airspace based on deep learning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727592-727592. |
| [10] | Baichuan ZHANG, Wenhao BI, An ZHANG, Zeming MAO, Mi YANG. Transformer-based error compensation method for air combat aircraft trajectory prediction [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327413-327413. |
| [11] | Lei HE, Weiqi QIAN, Kangsheng DONG, Xian YI, Congcong CHAI. Aerodynamic characteristics modeling of iced airfoil based on convolution neural networks [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 126434-126434. |
| [12] | Jinrui WANG, Shanshan JI, Zongzhen ZHANG, Zhenyun CHU, Baokun HAN, Huaiqian BAO. Parallel sparse filtering for fault diagnosis under bearing acoustic signal [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(4): 426887-426887. |
| [13] | Peng DING, Yafei SONG. A cost-sensitive method for aerial target intention recognition [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328551-328551. |
| [14] | Xiaohang LI, Jianjiang ZHOU. Multi⁃scale modality fusion network based on adaptive memory length [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(22): 628977-628977. |
| [15] | Wei LI, Yan GUO, Ning LI, Cuntao LIU, Hao YUAN. Intelligent reflector surface assisted UAV mobile edge computing task data maximization method [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 328486-328486. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 476
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 757
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341