Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (17): 530249.doi: 10.7527/S1000-6893.2024.30249
• Articles • Previous Articles Next Articles
Chuangxin ZHAO, Haojian TI, Zhaohong LI, Shan FENG, Shuxing YANG, Peng TANG( )
)
Received:2024-01-29
Revised:2024-03-12
Accepted:2024-04-16
Online:2024-09-15
Published:2024-05-08
Contact:
Peng TANG
E-mail:tp_study@hotmail.com
Supported by:CLC Number:
Chuangxin ZHAO, Haojian TI, Zhaohong LI, Shan FENG, Shuxing YANG, Peng TANG. Multi⁃UAV cooperative formation control and flight test verification[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(17): 530249.
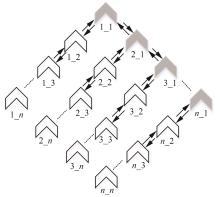
Fig.1
General diamond formation
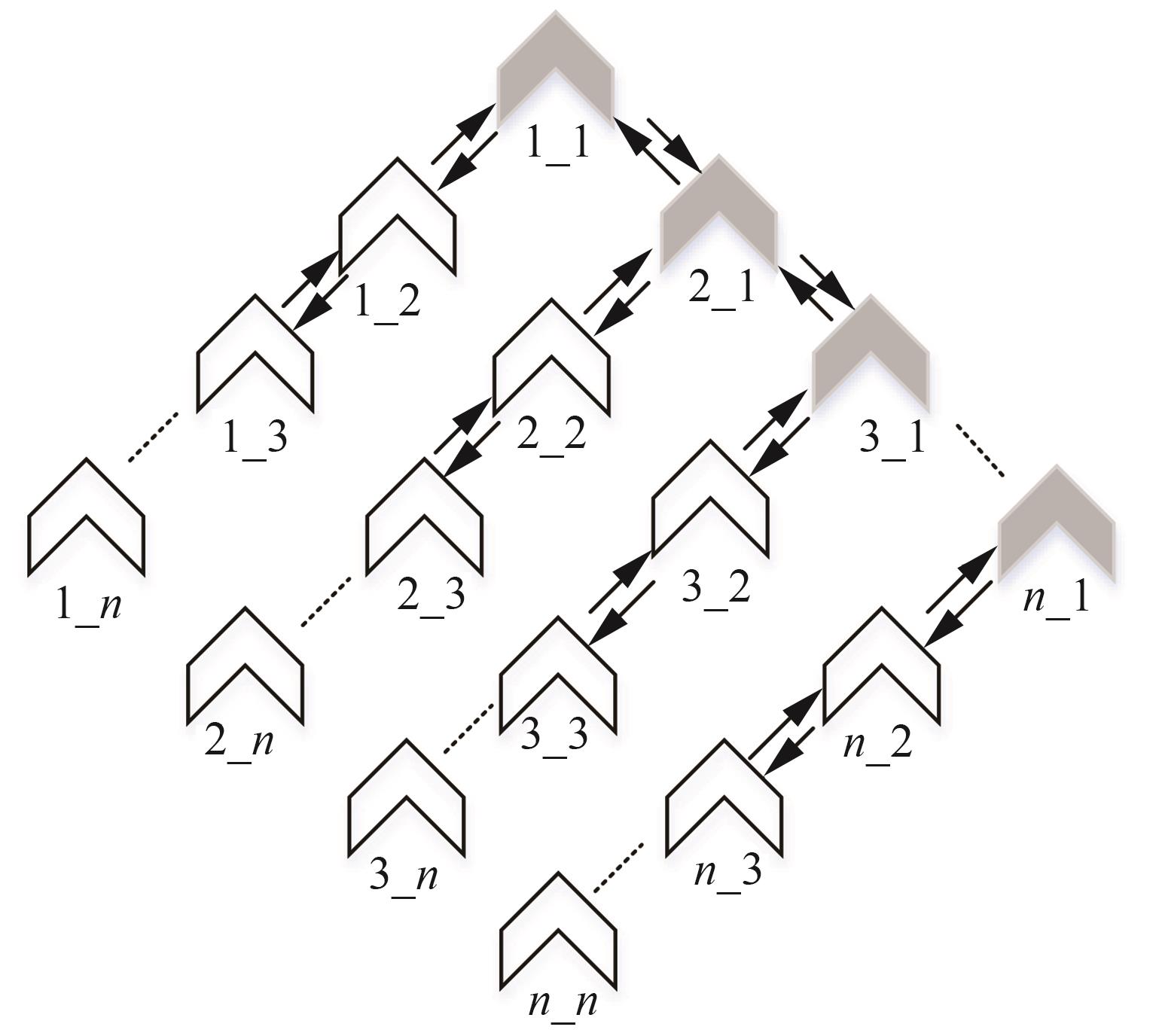

Fig.2
General herringbone formation
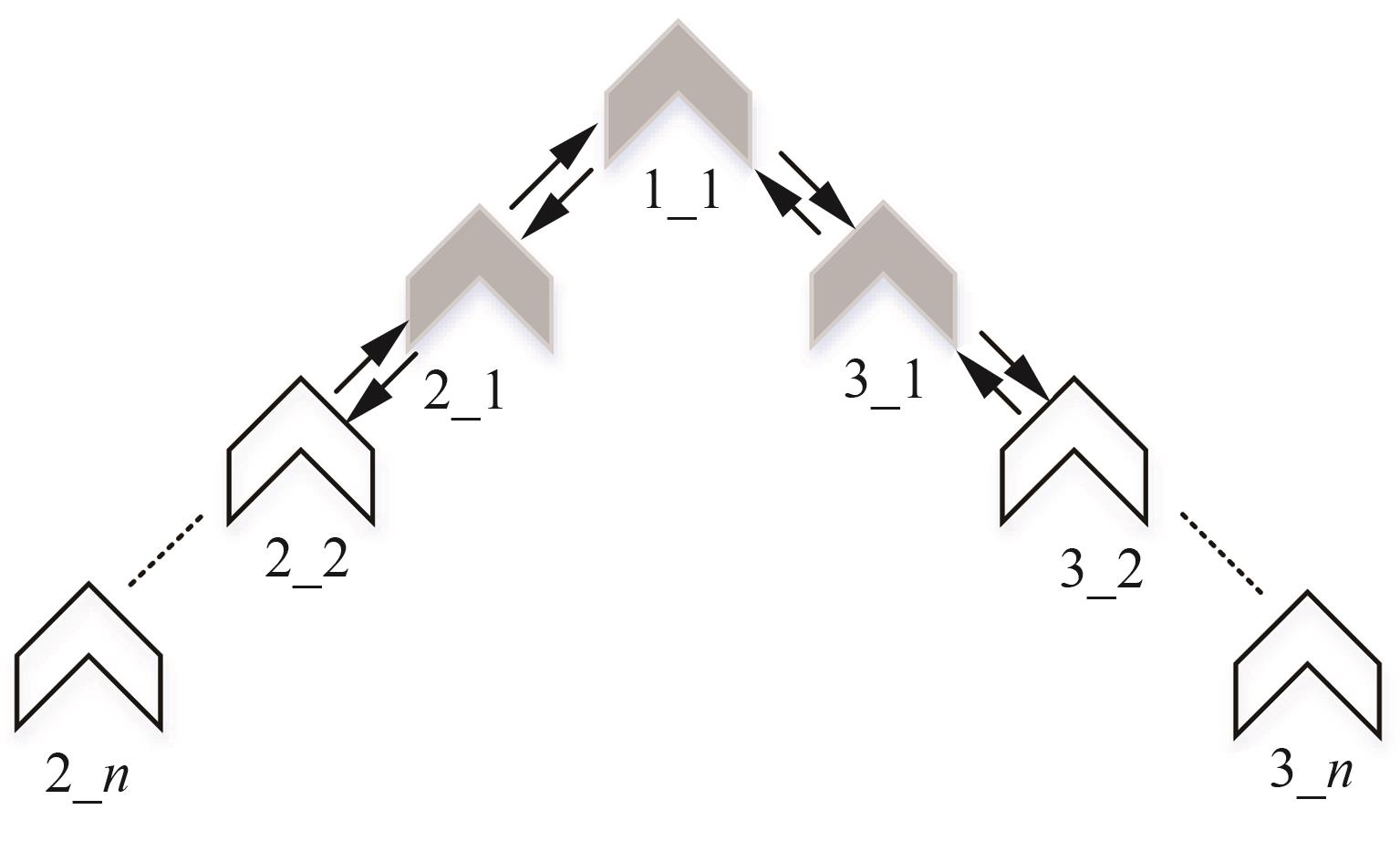

Fig.3
General delta formation
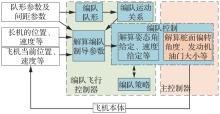
Fig.4
Control frame of formation flight based on Leader-Follower method
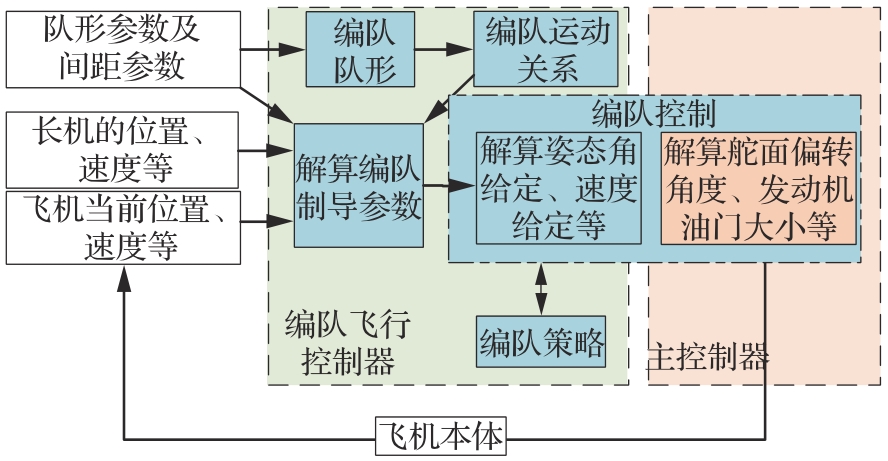
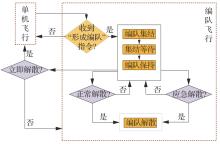
Fig.5
Formation status switch
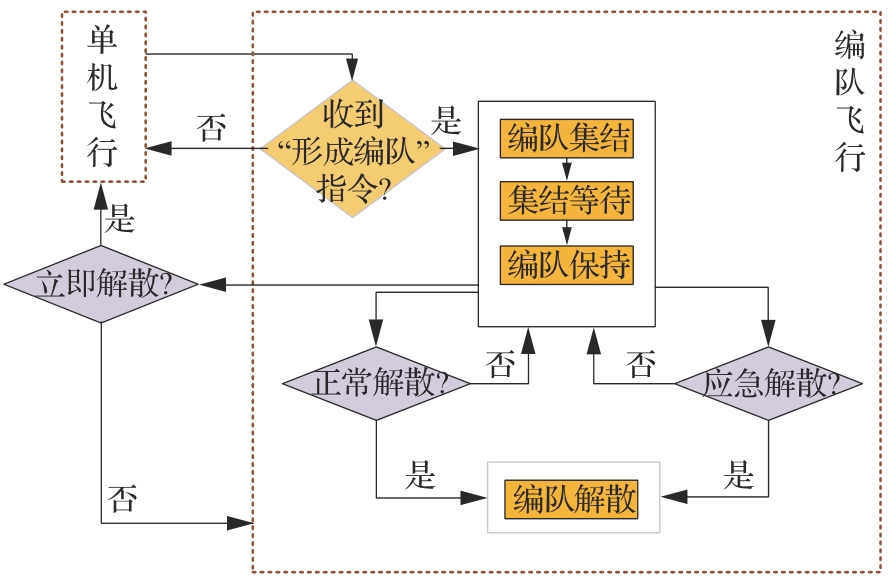
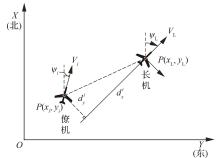
Fig.6
Diagram of Leader-Follower relative motion
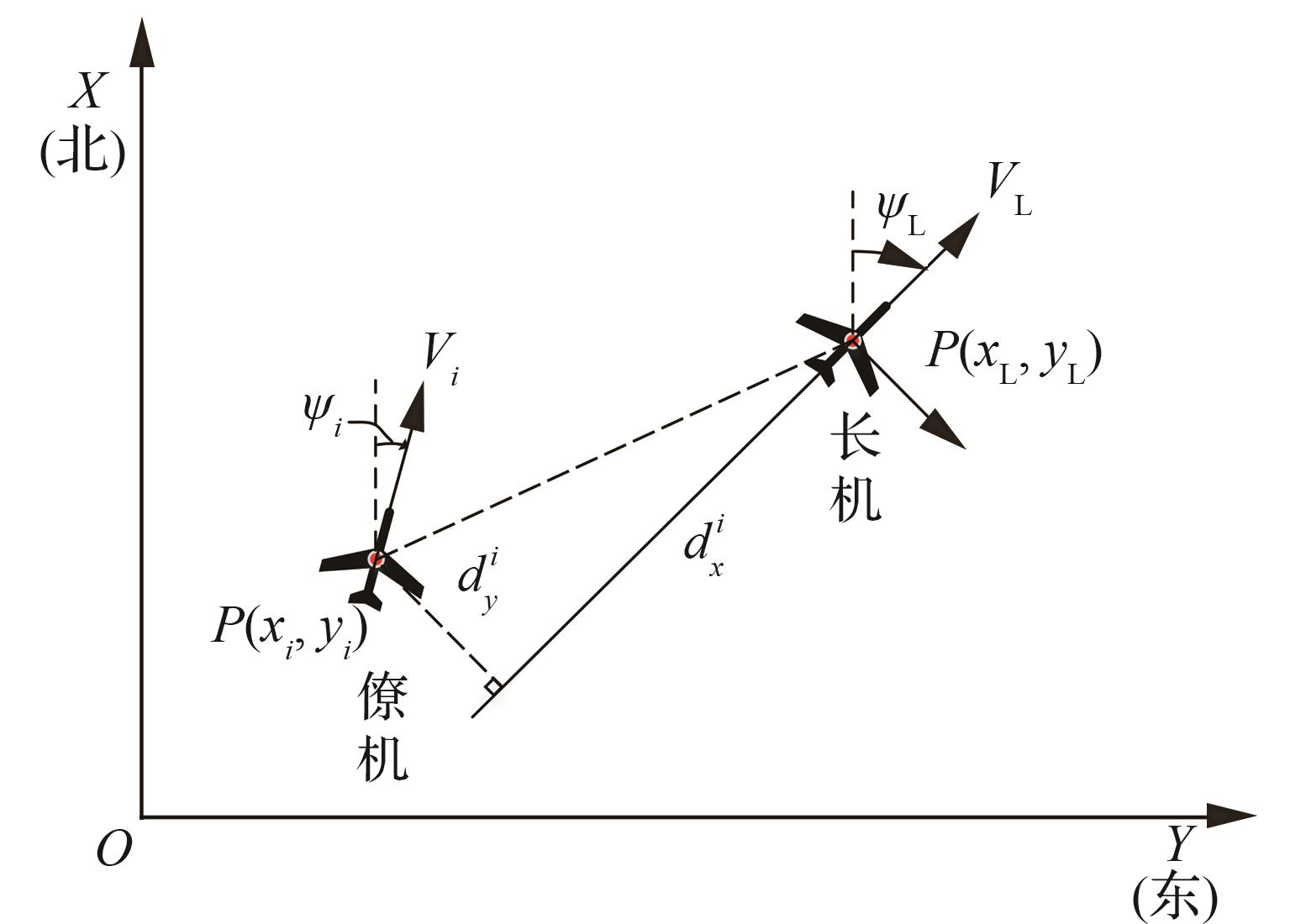
Fig.7
Strategies of formation process
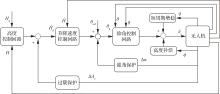
Fig.8
Controller in altitude hold mode
Fig.9
Diagram of formation dissolution

Fig.10
Simulation comparison in formation keeping stage
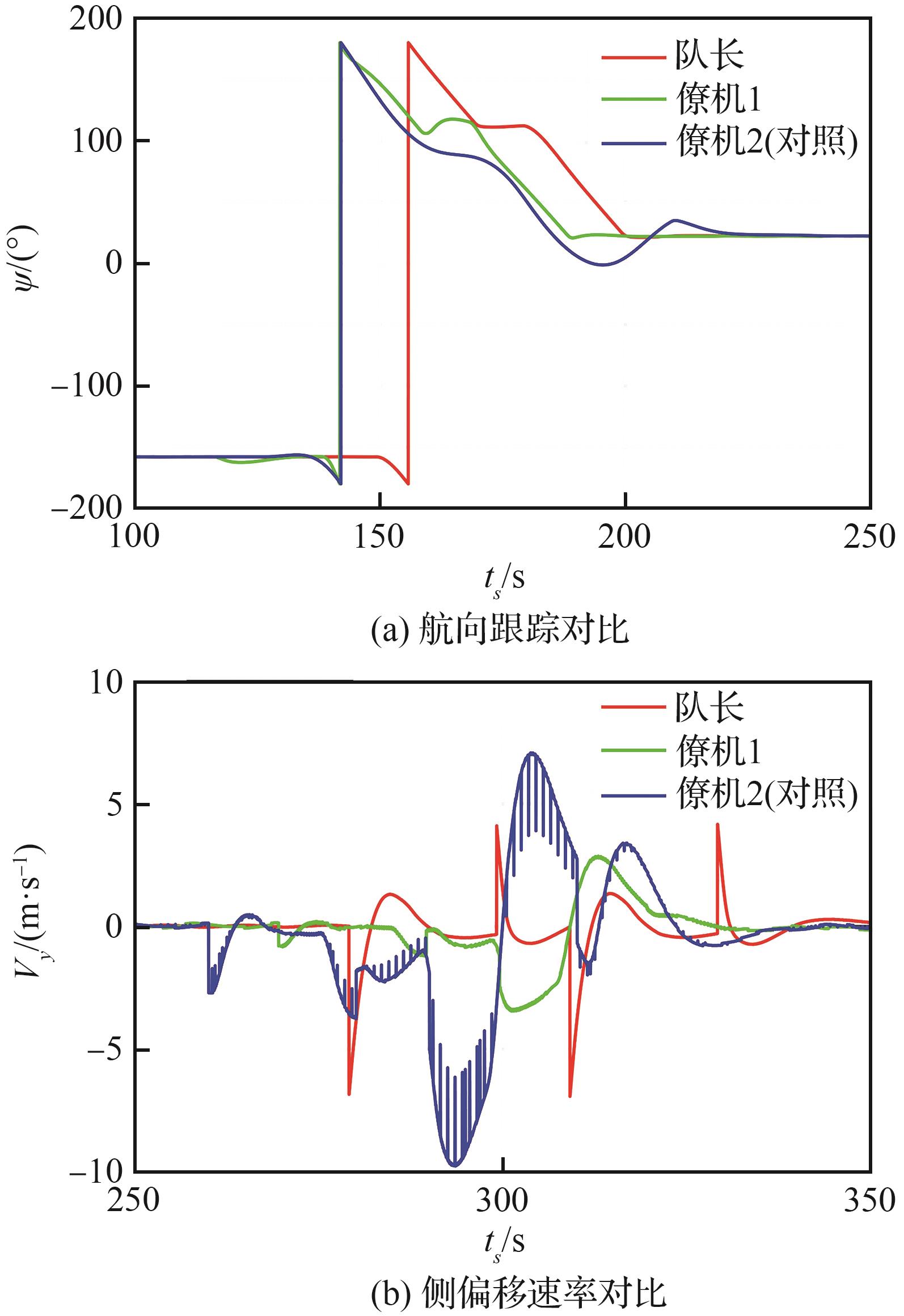
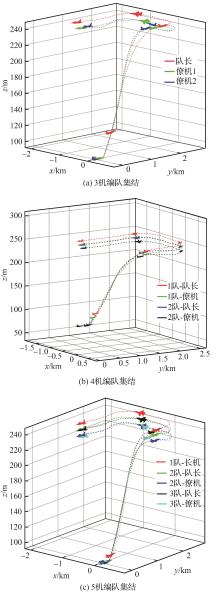
Fig.11
Formation flying from take-off to assembling stage
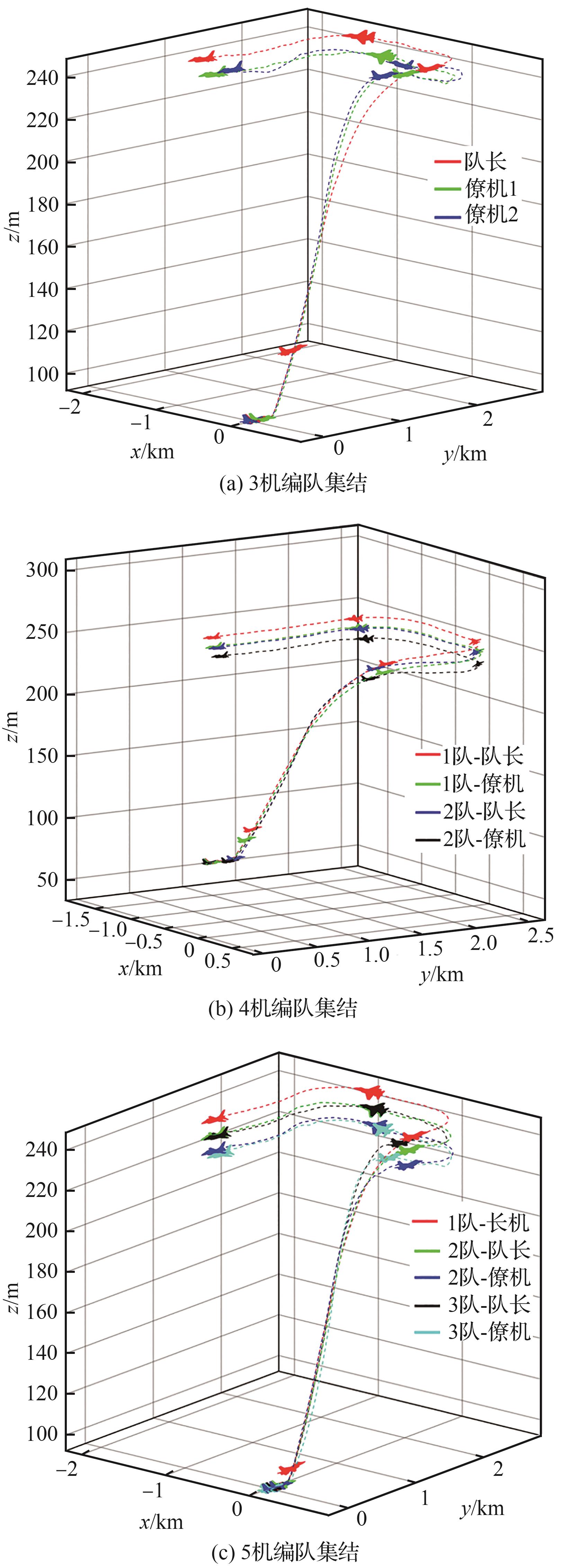
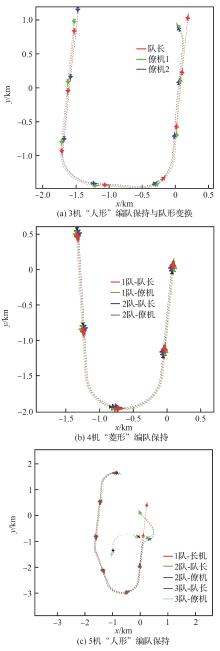
Fig.12
Cooperative formation flight keeping and change


Fig.13
Process of formation dissolution until landing
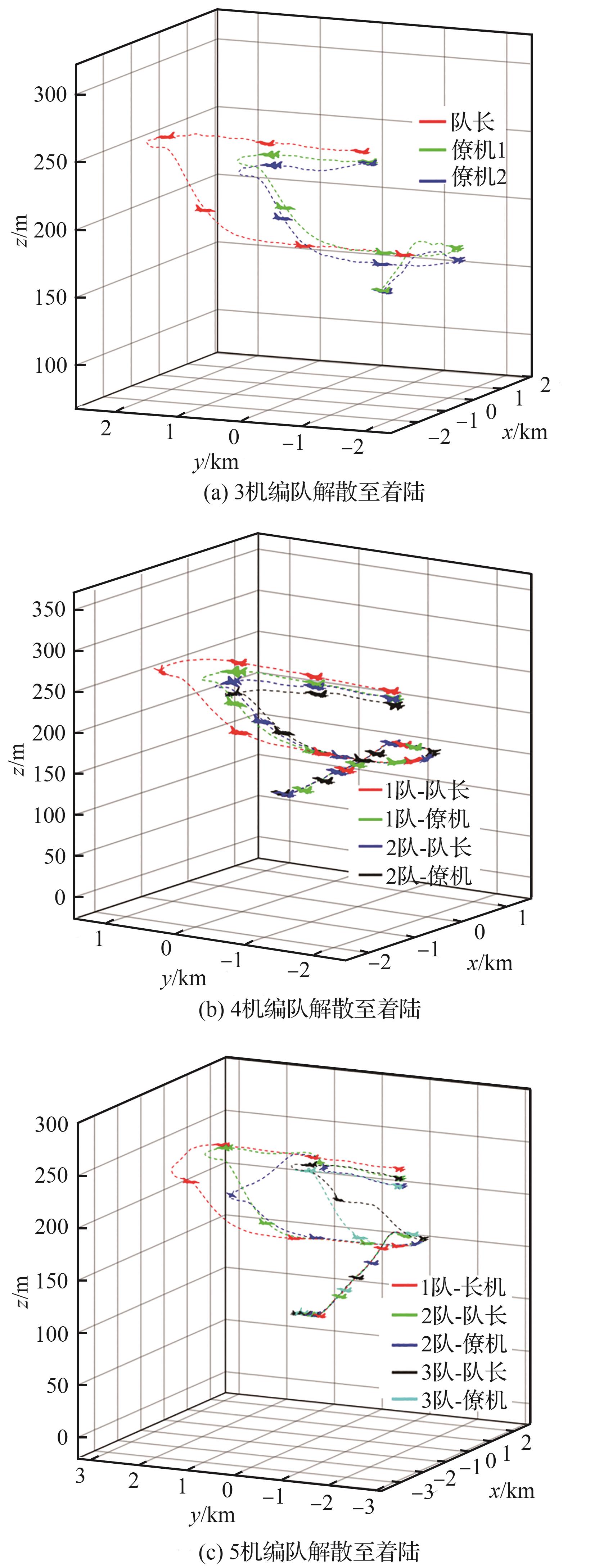
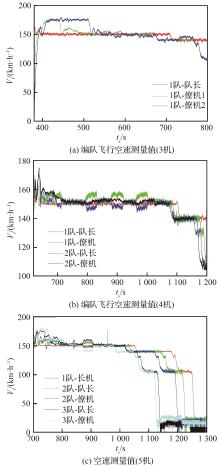
Fig.14
Measured airspeed of each UAV
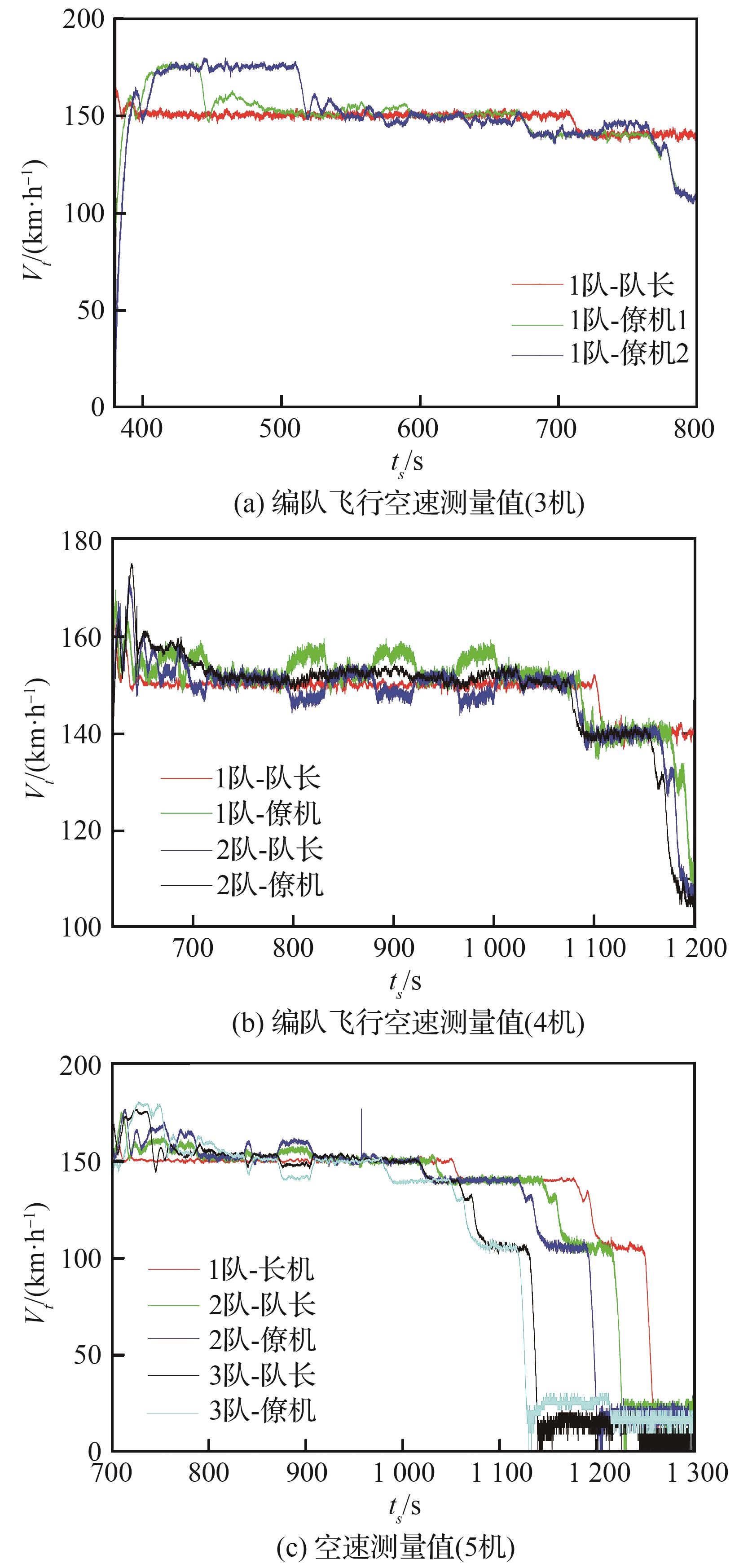
Fig.15
Measured airspeed of each UAV
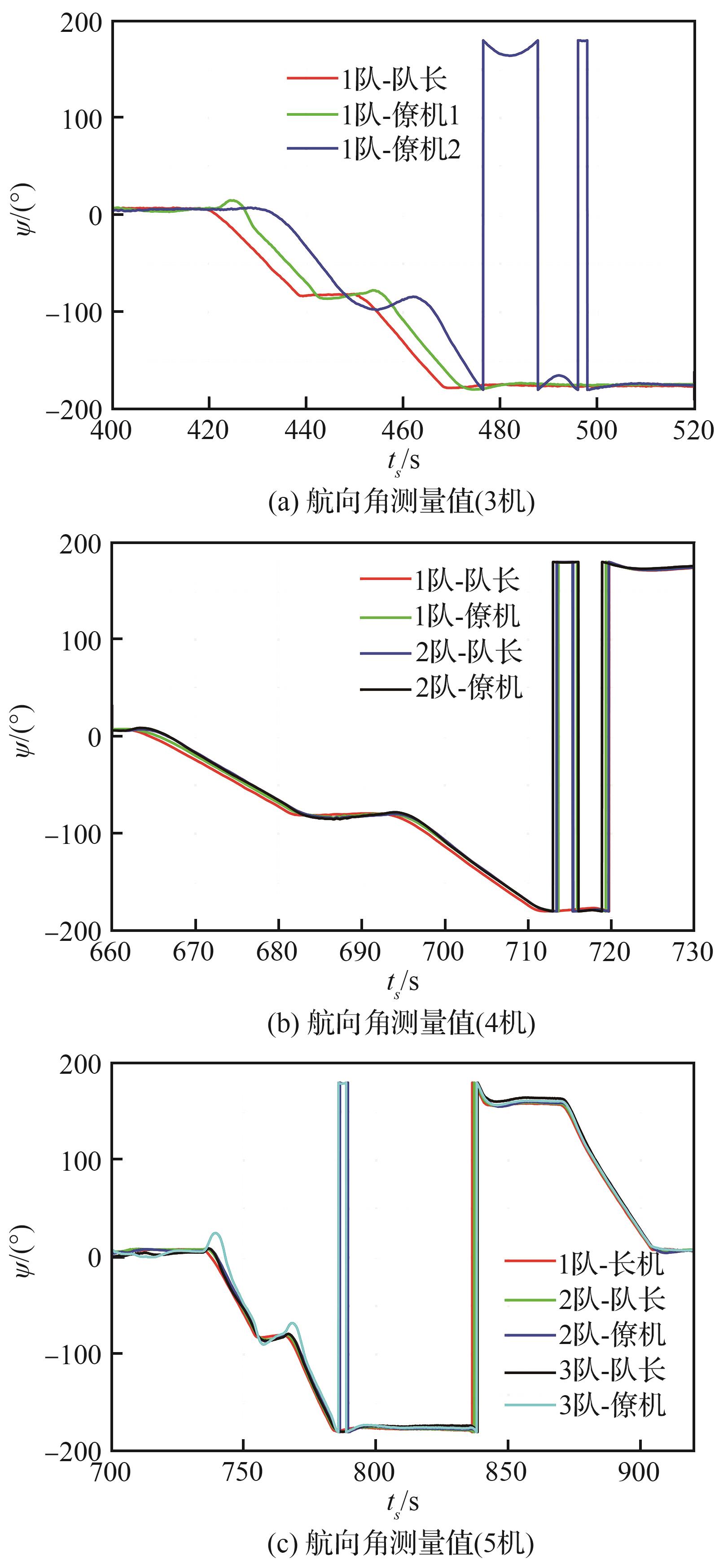
Fig.16
Measured height of each UAV in whole process
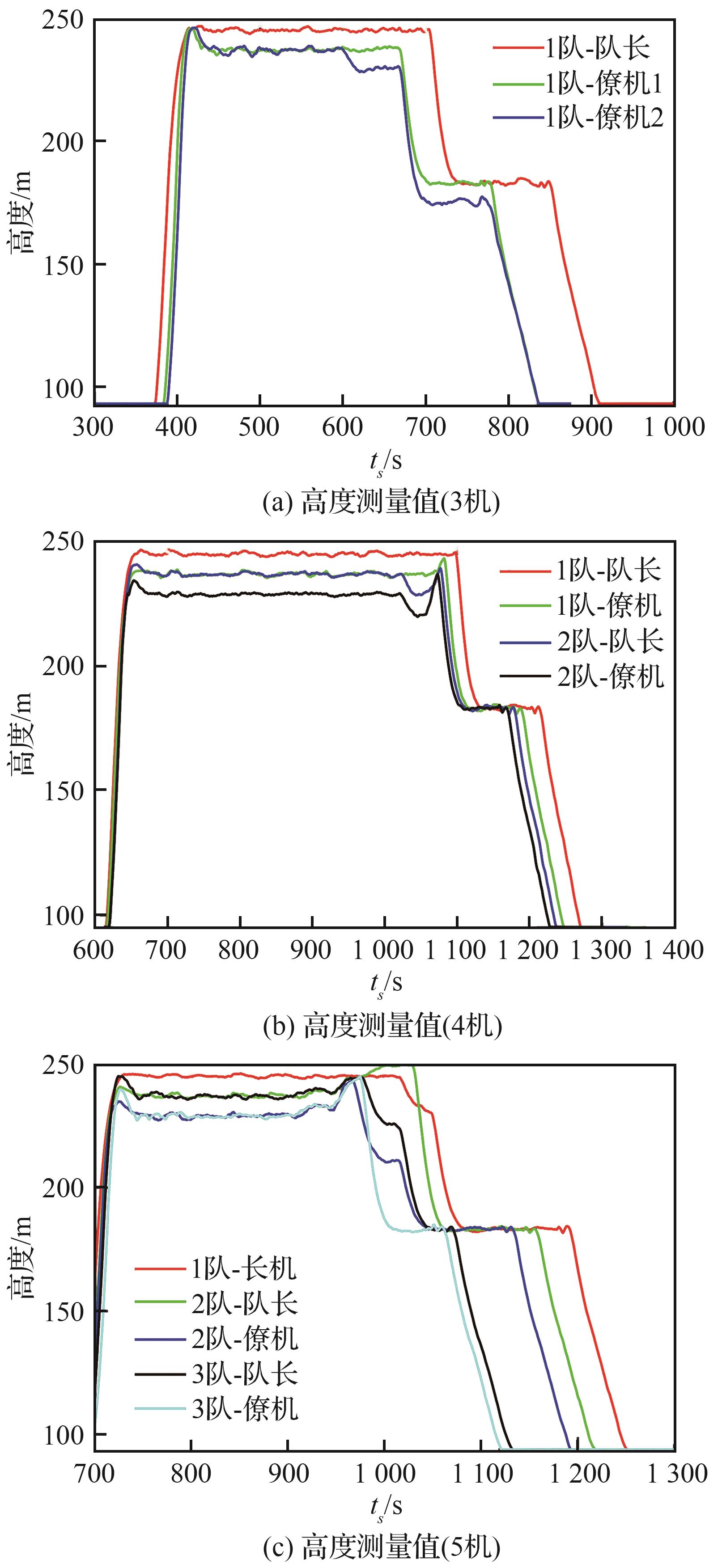
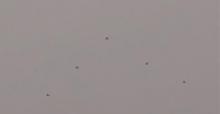
Fig.17
Logged scene from the ground view of five UAVs formation flying

Tabel 1
Standard deviation of relative position (5 UAVs-formation keep stage)
| 编队 | 平面相对距离 标准差/m | 相对高度 标准差/m |
|---|---|---|
| 1队长机-2队长机 | 1.62 | 0.35 |
| 1队长机-3队长机 | 3.13 | 0.81 |
| 2队长机-2队僚机 | 1.69 | 0.41 |
| 2队长机-3队僚机 | 2.49 | 0.72 |
| 1 | 苗昊春, 刘重, 王根. 协同制导控制技术发展现状及展望[J]. 前瞻科技, 2022, 1(4): 40-54. |
| MIAO H C, LIU Z, WANG G. Research status and prospects of cooperative guidance and control technology[J]. Science and Technology Foresight, 2022, 1(4): 40-54 (in Chinese). | |
| 2 | 张毅, 于浩, 杨秀霞, 等. 无人机集群分组编队控制跟踪一体化设计[J]. 系统工程与电子技术, 2023, 45(3): 848-858. |
| ZHANG Y, YU H, YANG X X, et al. Integrated design of group formation control and tracking of UAV swarm[J]. Systems Engineering and Electronics, 2023, 45(3): 848-858 (in Chinese). | |
| 3 | CHEN H, WANG X K, SHEN L C, et al. Formation flight of fixed-wing UAV swarms: A group-based hierarchical approach[J]. Chinese Journal of Aeronautics, 2021, 34(2): 504-515. |
| 4 | 赖云晖, 李瑞, 史莹晶, 等. 基于图论法的四旋翼三角形结构编队控制[J]. 控制理论与应用, 2018, 35(10): 1530-1537. |
| LAI Y H, LI R, SHI Y J, et al. On the study of a multi-quadrotor formation control with triangular structure based on graph theory[J]. Control Theory & Applications, 2018, 35(10): 1530-1537 (in Chinese). | |
| 5 | REN W, BEARD R W. Distributed consensus in multi-vehicle cooperative control[M]. London: Springer London, 2008. |
| 6 | ZHANG Q R, LIU H H T. Aerodynamics modeling and analysis of close formation flight[J]. Journal of Aircraft, 2017, 54(6): 2192-2204. |
| 7 | 段海滨, 邱华鑫. 基于群体智能的无人机集群自主控制[M]. 北京: 科学出版社, 2018. |
| DUAN H B, QIU H X. Unmanned aerial vehicle swarm autonomous control based on swarm intelligence[M]. Beijing: Science Press, 2018 (in Chinese). | |
| 8 | DU H B, CHEN M Z Q, WEN G H. Leader–following attitude consensus for spacecraft formation with rigid and flexible spacecraft[J]. Journal of Guidance, Control, and Dynamics, 2016, 39(4): 944-951. |
| 9 | 戴邵武, 赵超轮, 李飞, 等. 一种多约束下无人机编队的模型预测控制算法[J]. 控制与决策, 2023, 38(3): 706-714. |
| DAI S W, ZHAO C L, LI F, et al. An algorithm of model predictive control for formation control of a multiUAV system considering multiple constraints[J]. Control and Decision, 2023, 38(3): 706-714 (in Chinese). | |
| 10 | 张广玉, 何玉庆, 代波, 等. 面向自由飞行目标捕获的四旋翼最优轨迹规划[J]. 信息与控制, 2019, 48(4): 469-476, 485. |
| ZHANG G Y, HE Y Q, DAI B, et al. Optimal trajectory planning of a quadrotor toward free flying target catching[J]. Information and Control, 2019, 48(4): 469-476, 485 (in Chinese). | |
| 11 | 张新昱, 谢思宇, 陶洋, 等. 面向无人机空中加油紧密编队的鲁棒控制方法[J]. 航空学报, 2023, 44(20): 628425. |
| ZHANG X Y, XIE S Y, TAO Y, et al. A robust control method for close formation of aerial-refueling UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628425 (in Chinese). | |
| 12 | 吴立尧, 韩维, 张勇, 等. 基于领航-跟随的有人/无人机编队队形保持控制[J]. 控制与决策, 2021, 36(10): 2435-2441. |
| WU L Y, HAN W, ZHANG Y, et al. Formation keeping control for manned/unmanned aerial vehicle formation based on leader-follower strategy[J]. Control and Decision, 2021, 36(10): 2435-2441 (in Chinese). | |
| 13 | GAZI V. Swarm aggregations using artificial potentials and sliding-mode control[J]. IEEE Transactions on Robotics, 2005, 21(6): 1208-1214. |
| 14 | 张磊, 方洋旺, 毛东辉, 等. 导弹协同攻击编队自适应滑模控制器设计[J]. 宇航学报, 2014, 35(6): 700-707. |
| ZHANG L, FANG Y W, MAO D H, et al. Adaptive sliding-mode controller design for missile cooperative engagement[J]. Journal of Astronautics, 2014, 35(6): 700-707 (in Chinese). | |
| 15 | 杜昕, 朱喆, 胡芳芳, 等. 空中无人加油自主对接导航制导与控制[J]. 航空学报, 2023, 44(20): 628827. |
| DU X, ZHU Z, HU F F, et al. Guidance, navigation and control for airborne docking of autonomous aerial refueling[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628827 (in Chinese). | |
| 16 | DOGAN A, VENKATARAMANAN S. Nonlinear control for reconfiguration of unmanned-aerial-vehicle formation[J]. Journal of Guidance, Control, and Dynamics, 2005, 28(4): 667-678. |
| 17 | 张清瑞, 刘赟韵, 孙慧杰, 等. 固定翼无人机紧密编队的鲁棒协同跟踪控制[J]. 航空学报, 2024, 45(1): 629233. |
| ZHANG Q R, LIU Y Y, SUN H J, et al. Robust cooperative tracking control for close formation of fixed-wing unmanned aerial vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 629233 (in Chinese). | |
| 18 | ZHANG Q R, LIU H H T. Robust nonlinear close formation control of multiple fixed-wing aircraft[J]. Journal of Guidance, Control, and Dynamics, 2021, 44(3): 572-586. |
| 19 | XU D, GUO Y X, YU Z Y, et al. PPO-exp: keeping fixed-wing UAV formation with deep reinforcement learning[J]. Drones, 2022, 7(1): 28. |
| 20 | 相晓嘉, 闫超, 王菖, 等. 基于深度强化学习的固定翼无人机编队协调控制方法[J]. 航空学报, 2021, 42(4): 524009. |
| XIANG X J, YAN C, WANG C, et al. Coordination control method for fixed-wing UAV formation through deep reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 524009 (in Chinese). |
| [1] | Rongzu LI, Li LIU, Dun YANG. Optimal design of hydrogen-powered UAV based on multi-source domain fusion surrogate model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 630979-630979. |
| [2] | Zhongke SHI. Qualitative theory for engineering system and its application to flight control [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531463-531463. |
| [3] | Zhicheng ZHANG, Yuan ZHOU, Yu ZHAO, Weimin BAO. Cooperative formation control for multi-satellite system applied to distributed prescribed-time networking [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330932-330932. |
| [4] | Fujie WU, Bowen WANG, Jingya QI, Mingzhi CAO, Yingjun SANG, Sheng LI, Yuzhen ZHANG, Qian CHEN, Chao ZUO. A review of airborne multi-aperture panoramic image compositing [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630505-630505. |
| [5] | Yiquan WU, Kang TONG. Research advances on deep learning-based small object detection in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 30848-030848. |
| [6] | Jiang ZHAO, Minghao PI, Bailing TIAN, Pei CHI, Yingxun WANG. Self-organized consensus decision-making method for swarm UAV tracking multiple targets [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331635-331635. |
| [7] | Fang LIU, Chenyang LU, Yan LU, Xin WANG. Adaptive template update-based Transformer algorithm for UAV target tracking [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331687-331687. |
| [8] | Yu WANG, Zhipeng XIE, Yongjian TIAN, Guanglei MENG. Distributed UAV formation control with virtual structure guided reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331354-331354. |
| [9] | Yu LI, Tongwen CHEN, Zhigang WANG, Chiyung WEN, Xiaoxiong LIU. Incremental control of direct lift landing based on predefined-time theory [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531163-531163. |
| [10] | Zhibing ZHANG, Ziyang ZHEN. Research progress on guidance and control of fixed-wing manned and unmanned carrier-based aircraft landing [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 532336-532336. |
| [11] | Haijun ZHANG, Qingyue XIA, Xu MA, Chao REN, Yang LU. A review of unmanned aerial vehicles deployment optimization in 6G low-altitude communication scenarios [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531296-531296. |
| [12] | Ziyi ZONG, Xin DONG, Zhan TU, Jinwu XIANG. Countermeasures against uncooperative drones based on swarm encirclement [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531349-531349. |
| [13] | Junzhi LI, Teng LONG, Jingliang SUN, Hongyu MIAO, Zhenlin ZHOU. Differential flatness-based spatial-temporal hierarchical trajectory planning for fixed-wing UAVs in urban environments [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531369-531369. |
| [14] | Wenxiao HU, Di MU, Zhi LI, Yingyi GUO, Xinmin CHEN. Key technical issues and innovation strategies for development of low-altitude economy [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531539-531539. |
| [15] | Tao CHEN, Jian CHEN. Learning-observer-based resilient fault-tolerant control for quadrotor unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531346-531346. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341