ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (12): 227662.doi: 10.7527/S1000-6893.2022.27662
• Solid Mechanics and Vehicle Conceptual Design • Previous Articles Next Articles
Jiaxin YANG1, Shengjin TANG1( ), Liang LI1, Xiaoyan SUN2, Shuai QI3, Xiaosheng SI1
), Liang LI1, Xiaoyan SUN2, Shuai QI3, Xiaosheng SI1
Received:2022-06-22
Revised:2022-07-14
Accepted:2022-08-15
Online:2023-06-25
Published:2022-08-31
Contact:
Shengjin TANG
E-mail:tangshengjin27@126.com
Supported by:CLC Number:
Jiaxin YANG, Shengjin TANG, Liang LI, Xiaoyan SUN, Shuai QI, Xiaosheng SI. Remaining useful life prediction of implicit nonlinear Wiener degradation process based on multi-source information[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(12): 227662.
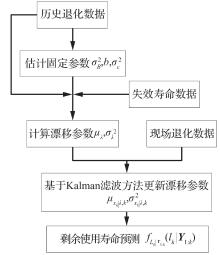
Fig.1
Flow of remaining useful life prediction based on failure time data fusion

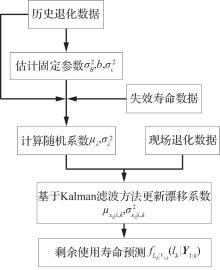
Fig.2
Flow of remaining useful life prediction based on multi-source information fusion
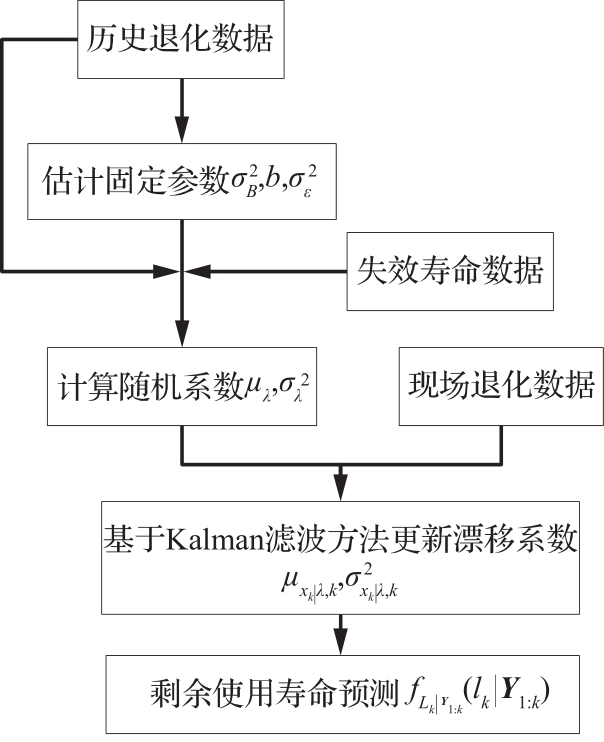
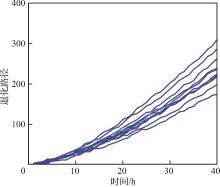
Fig.3
Some degradation paths
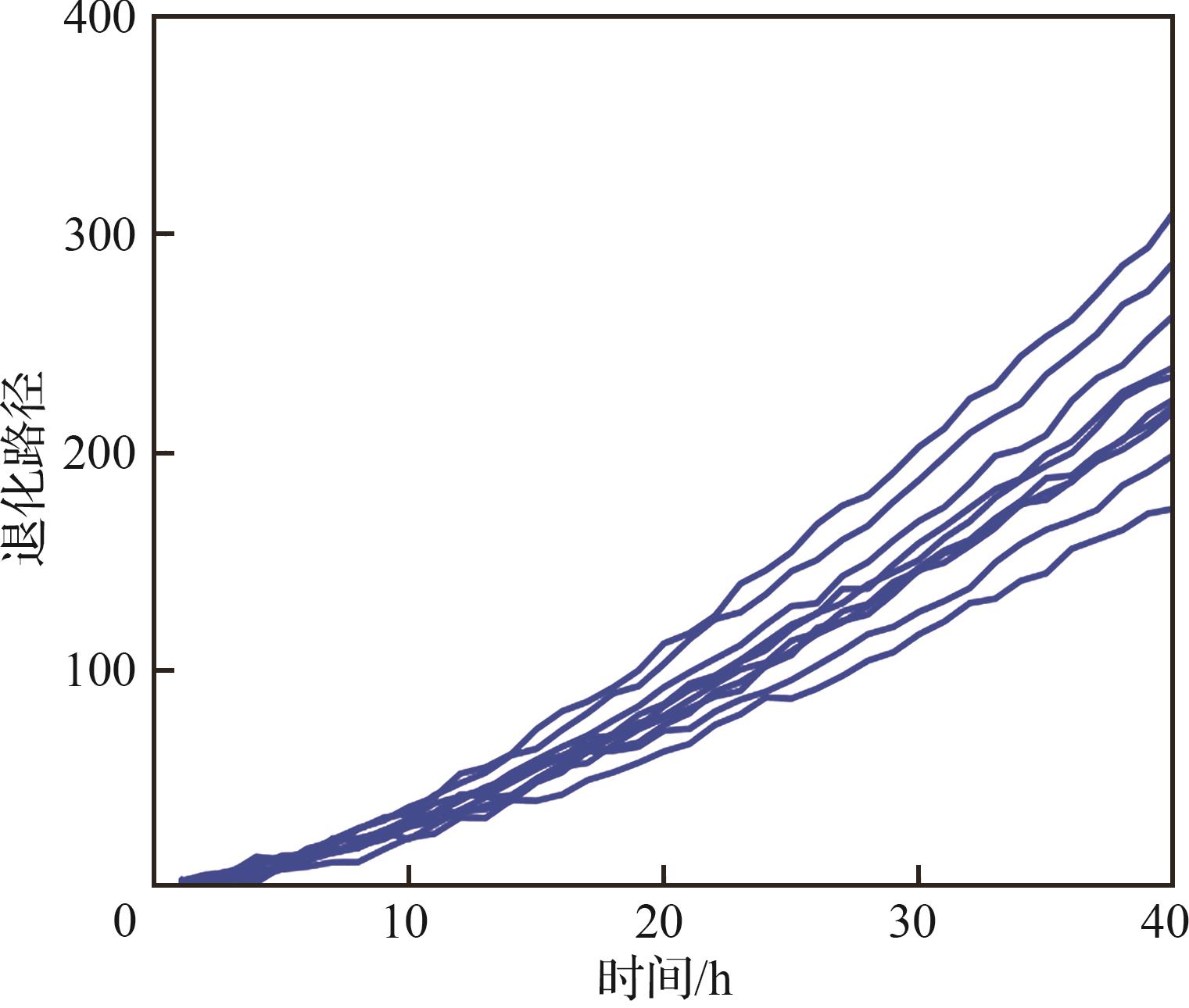

Fig.4
Estimation of μλ with change of number N of units
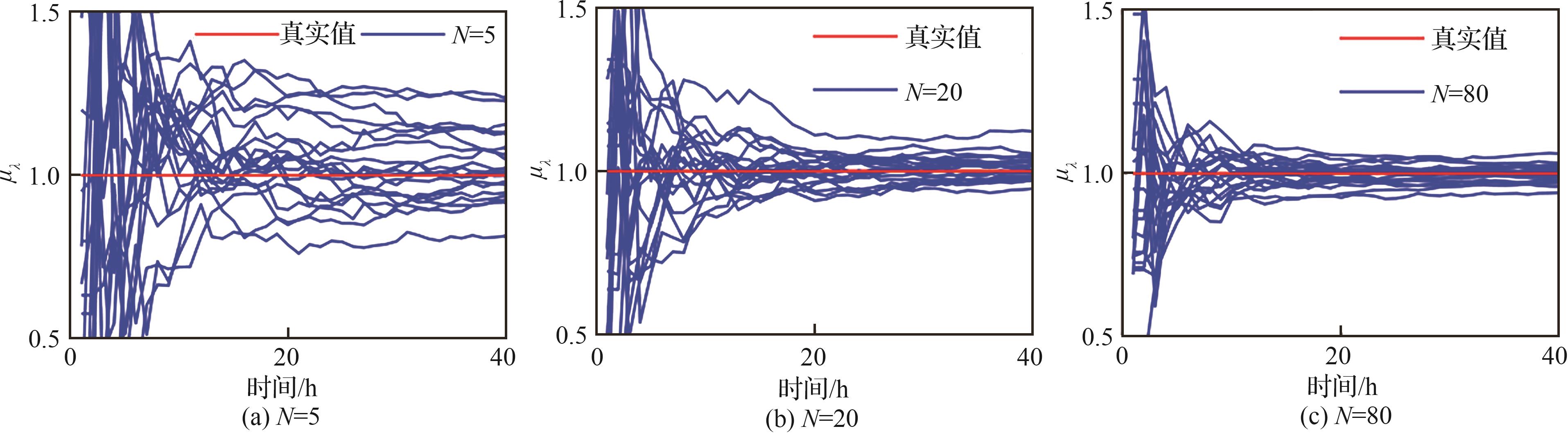

Fig.5
Estimation of σλ2 with change of number N of units
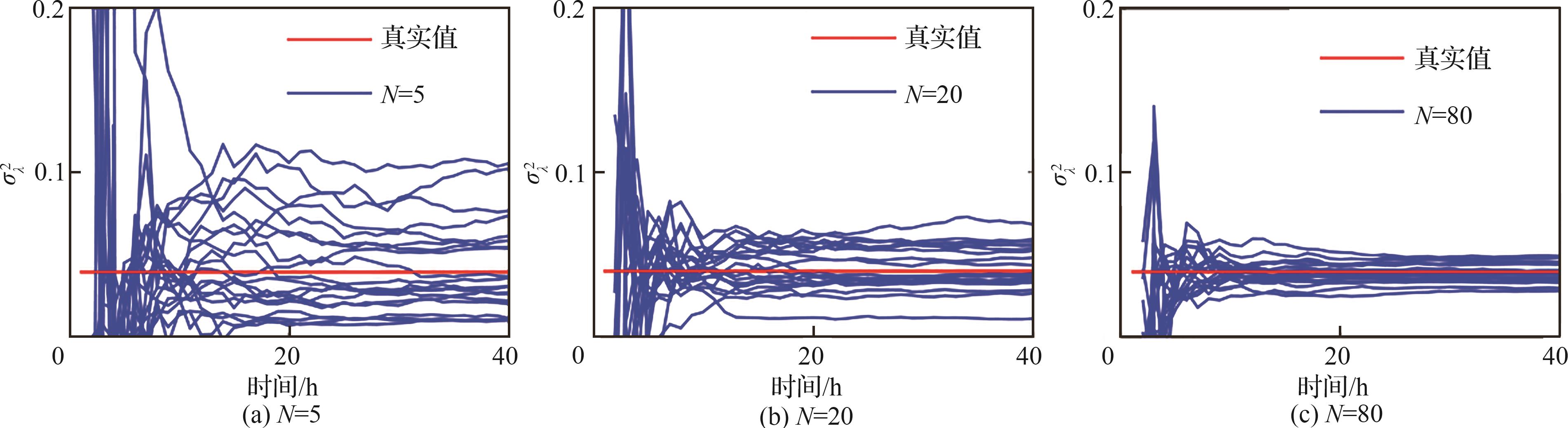

Fig.6
Estimation of σB2 with change of number N of units


Fig.7
Estimation of σε2 with change of number N of units


Fig.8
Estimation of b with change of number N of units
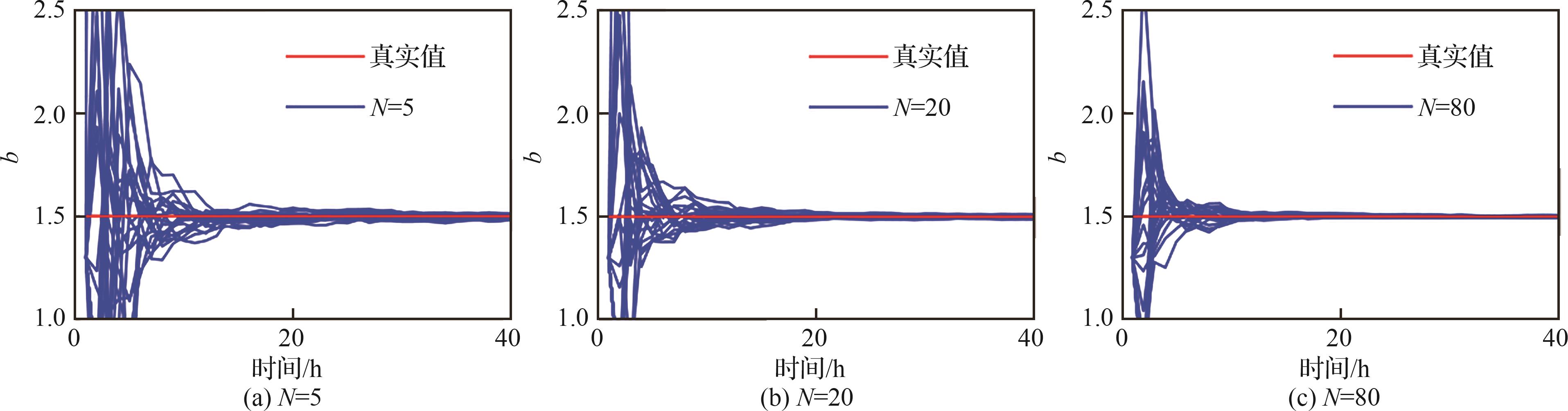
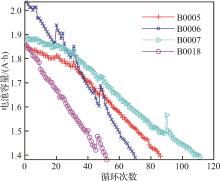
Fig.9
Degradation paths of lithium battery capacity

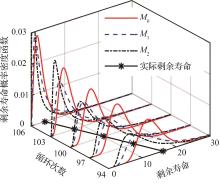
Fig.10
Estimated remaining useful life at different cycle times based on lithium battery data

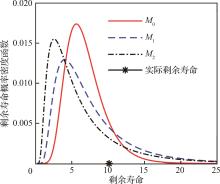
Fig.11
Estimated remaining useful life at 100 cycles

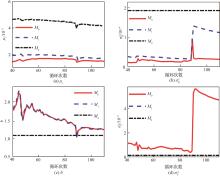
Fig.12
Posterior parameters of M0, M1 and M2 at different cycle times
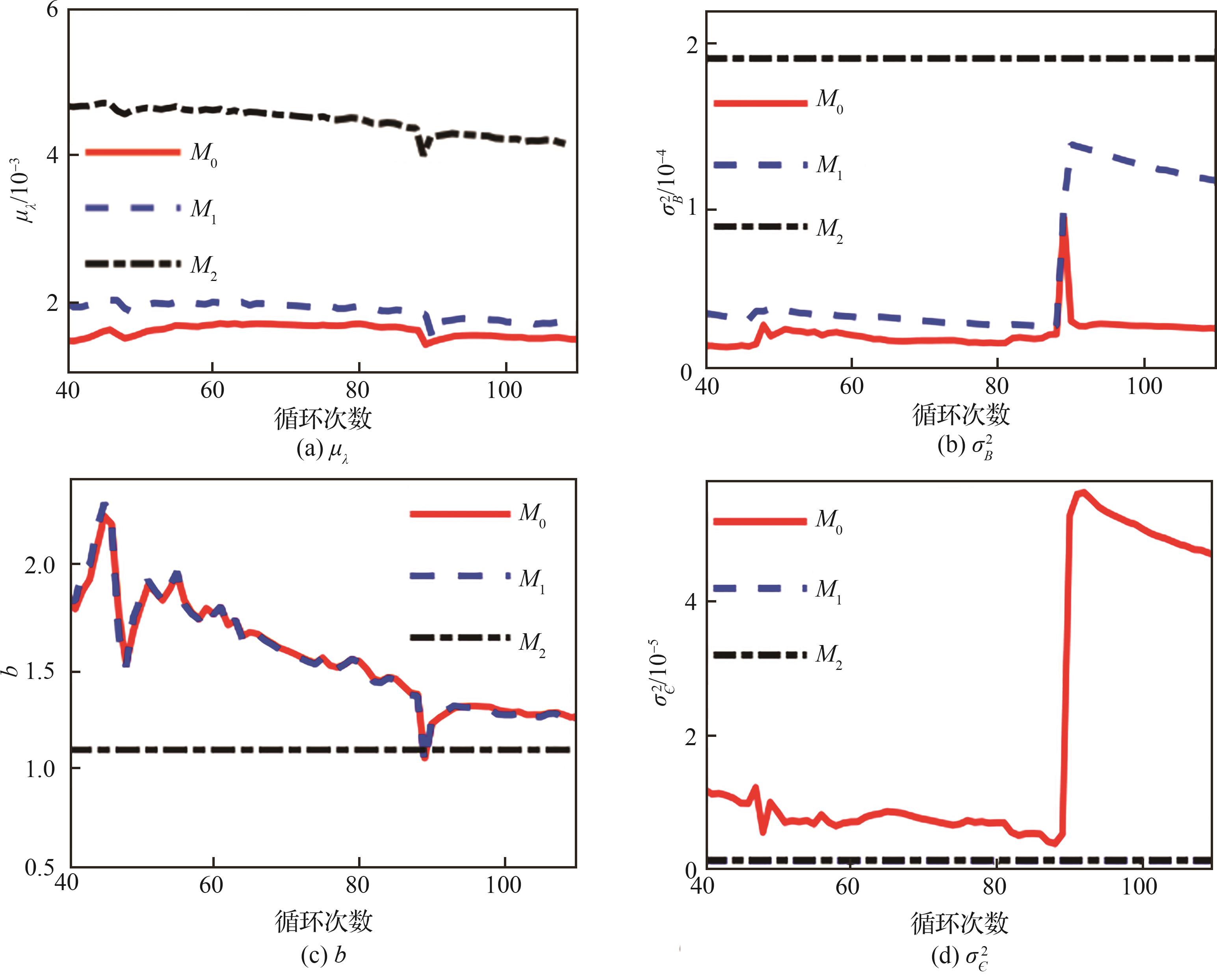
Fig.13
MSEs of remaining useful life of M0, M1 and M2
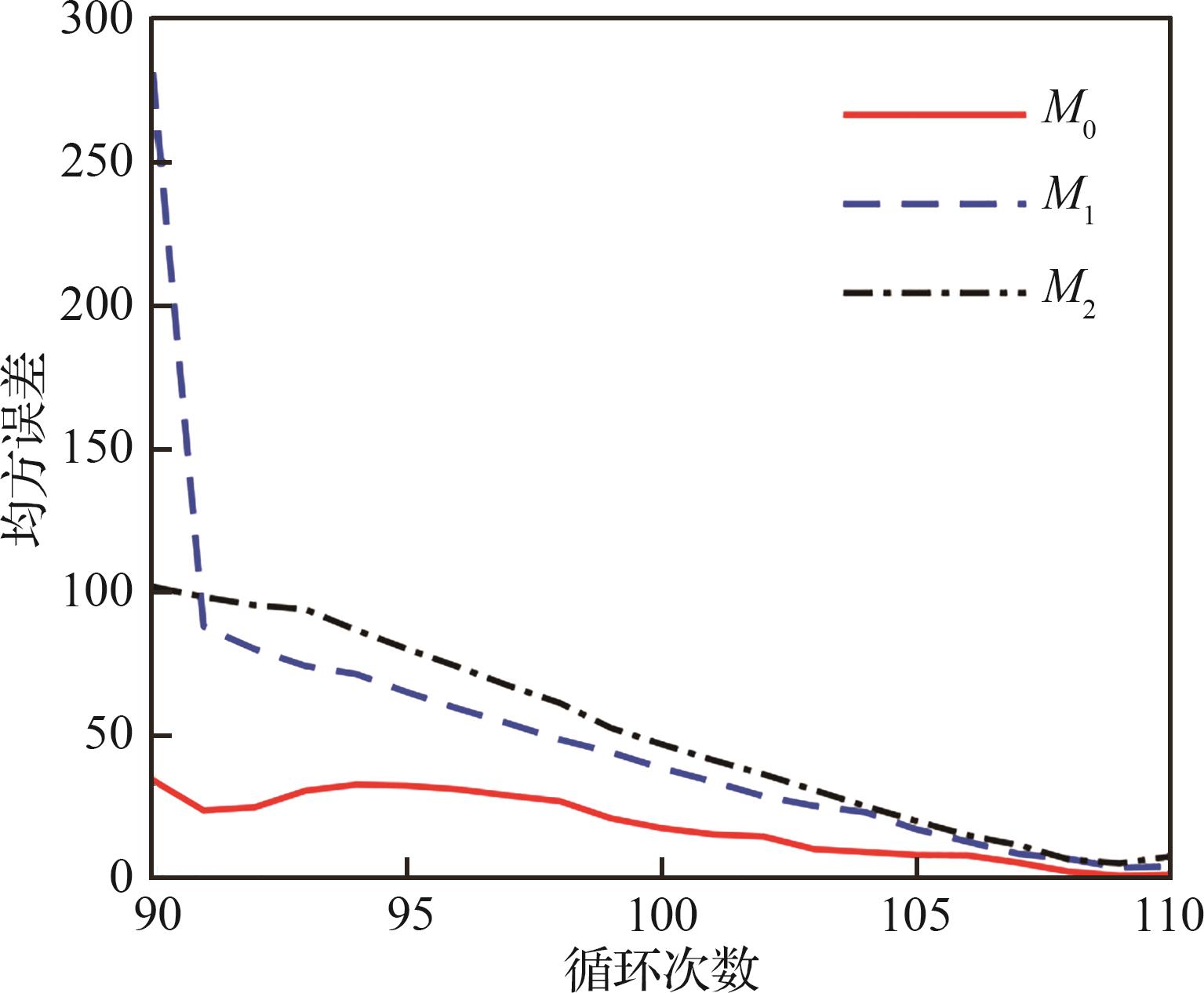

Fig.14
Degradation paths of fatigue crack
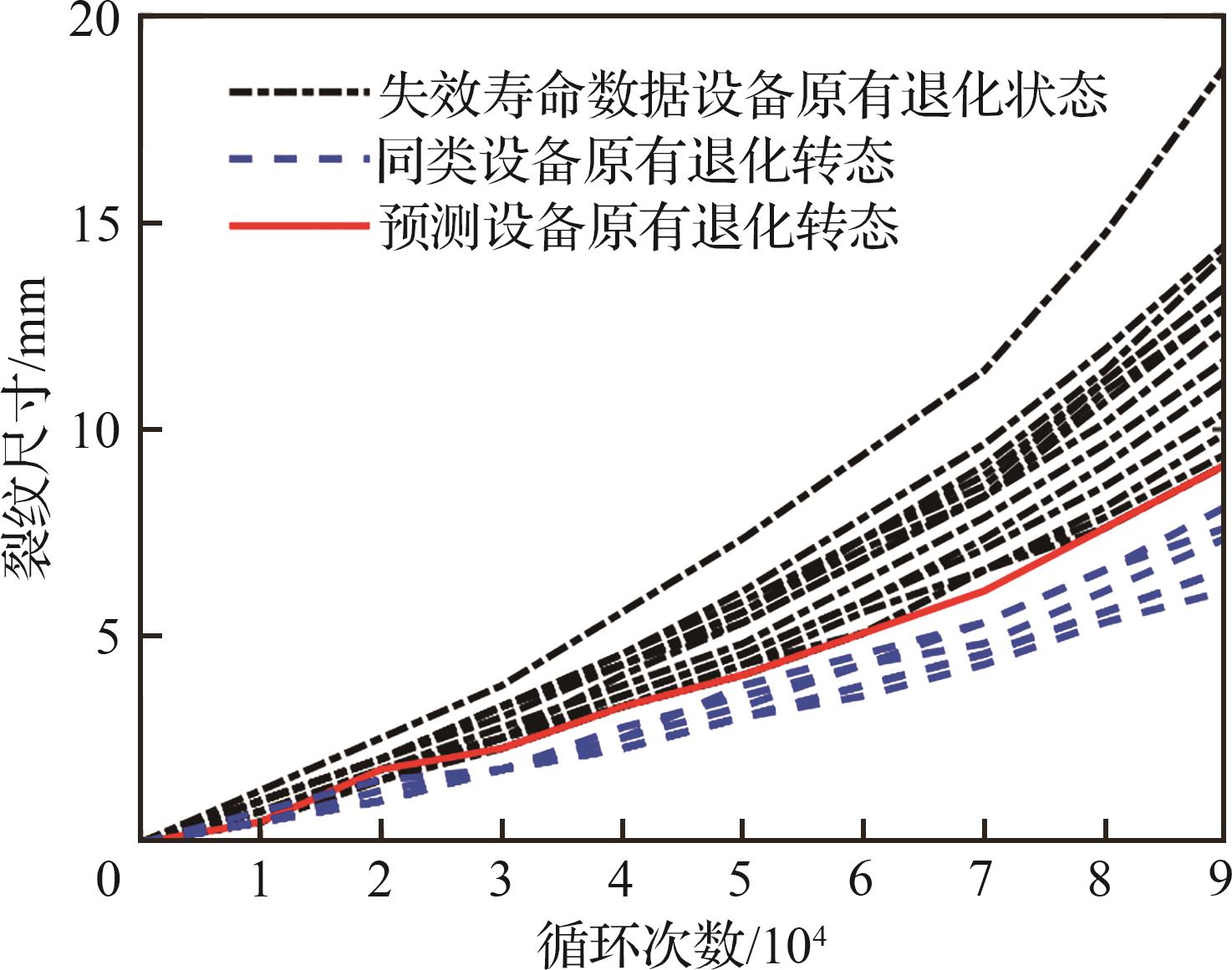
Table 1
Prior parameters of M0 at different times
| 循环次数/104 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|
| 7.275 4 | 7.388 4 | 6.743 9 | 6.991 0 | 7.287 8 | 8.631 9 | 10.147 6 | |
| 1.511 0 | 1.578 9 | 1.215 1 | 1.347 8 | 1.518 3 | 2.450 6 | 3.839 9 | |
| 1.105 6 | 1.112 8 | 1.070 0 | 1.086 9 | 1.106 4 | 1.185 9 | 1.261 7 | |
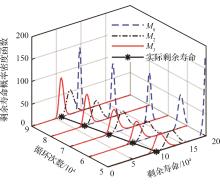
Fig.15
Estimated remaining useful life at different cycle times based on fatigue crack data
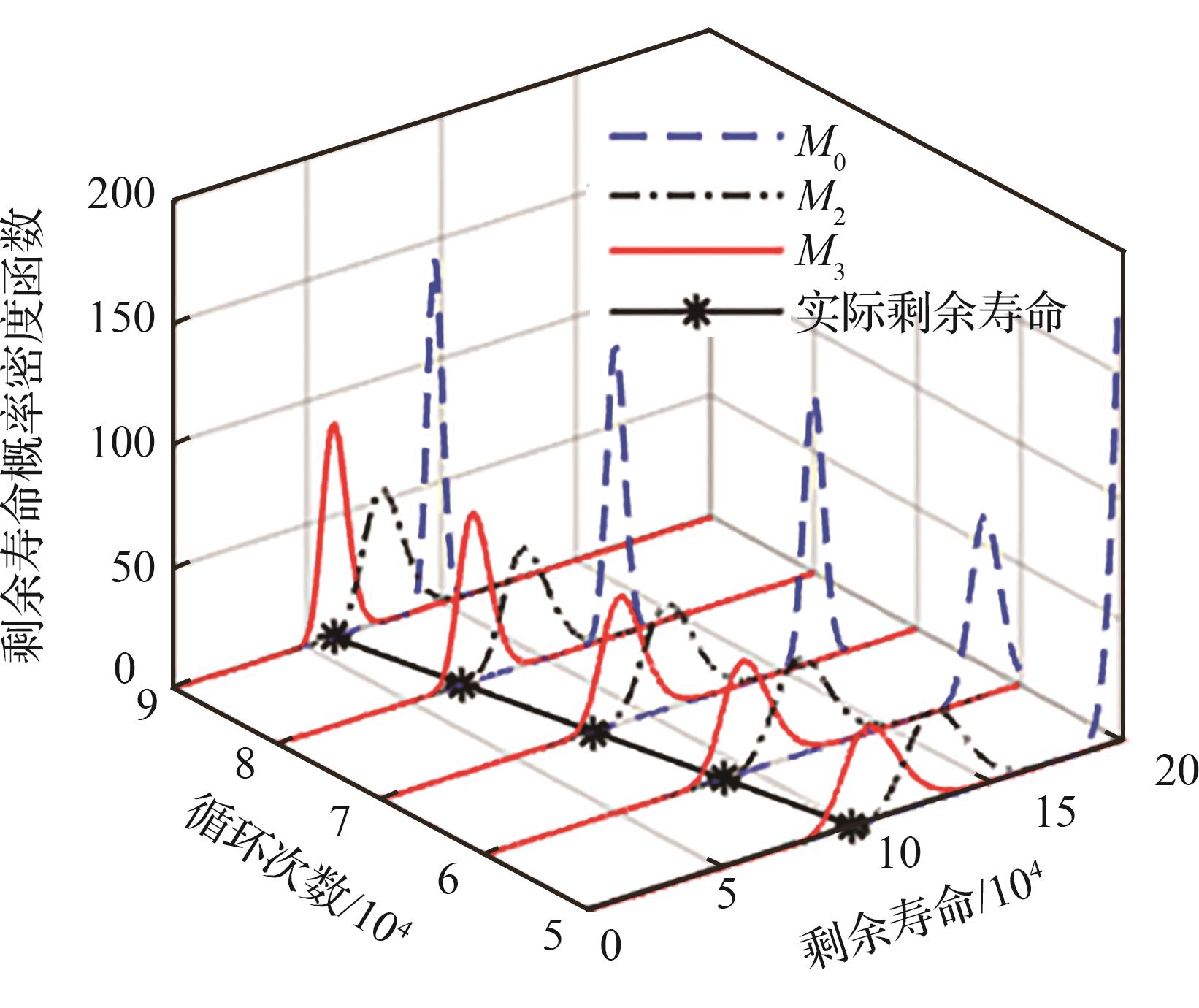
Fig.16
Estimated remaining useful life of M0,M2 and M3 at 0.09 million cycles

Fig.17
Posterior parameters of μλ and σλ2 at different cycle times


Fig.18
MSE of remaining useful life of M0, M2 and M3

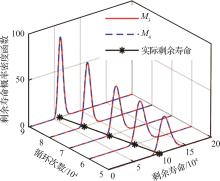
Fig.19
Estimated remaining useful life of M3 and M4 at different cycle times


Fig.20
Estimated remaining useful life of M3 and M4 at 0.09 million cycles
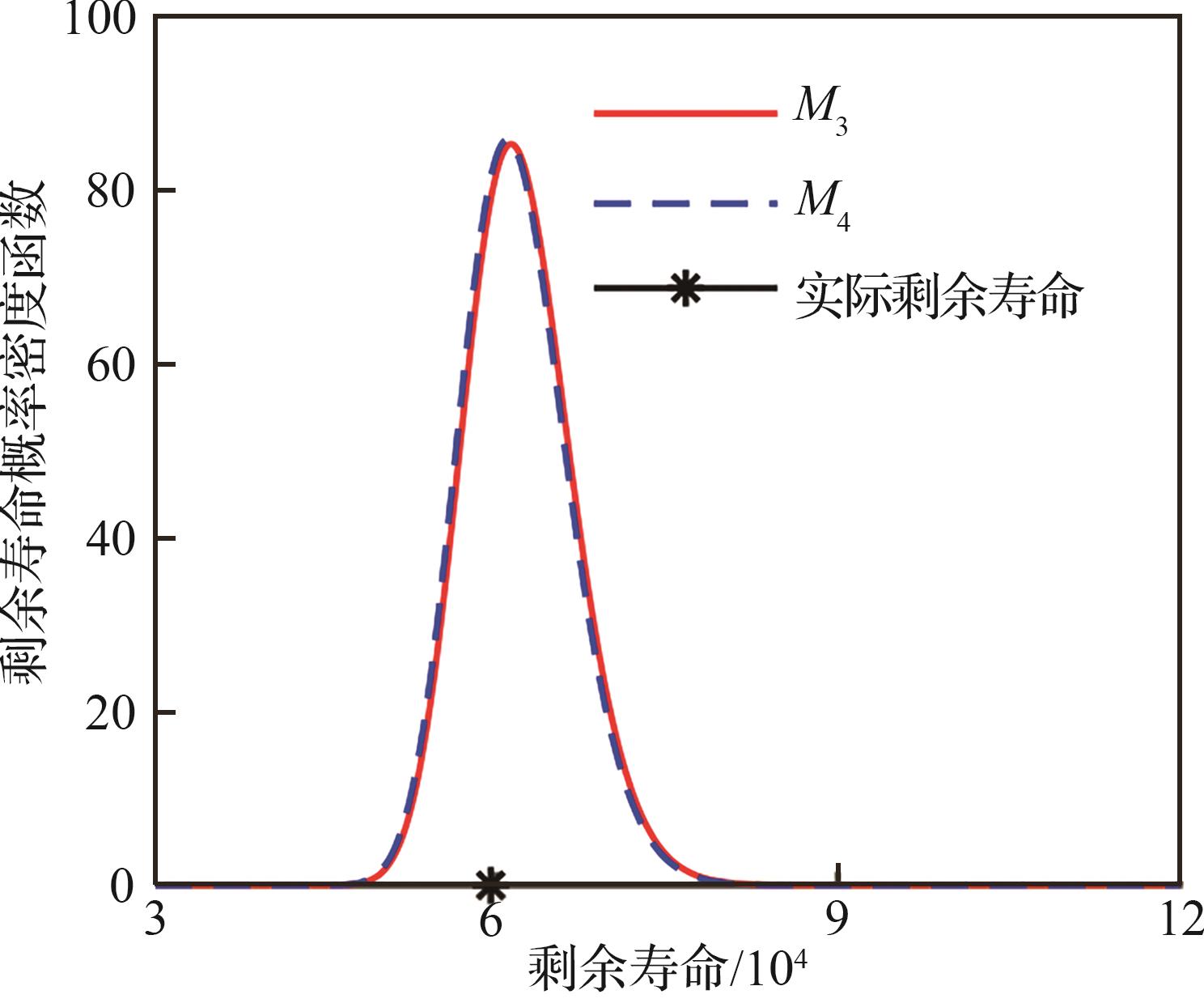

Fig.21
Estimated remaining useful life of M3 and M4 with additional measurement errors
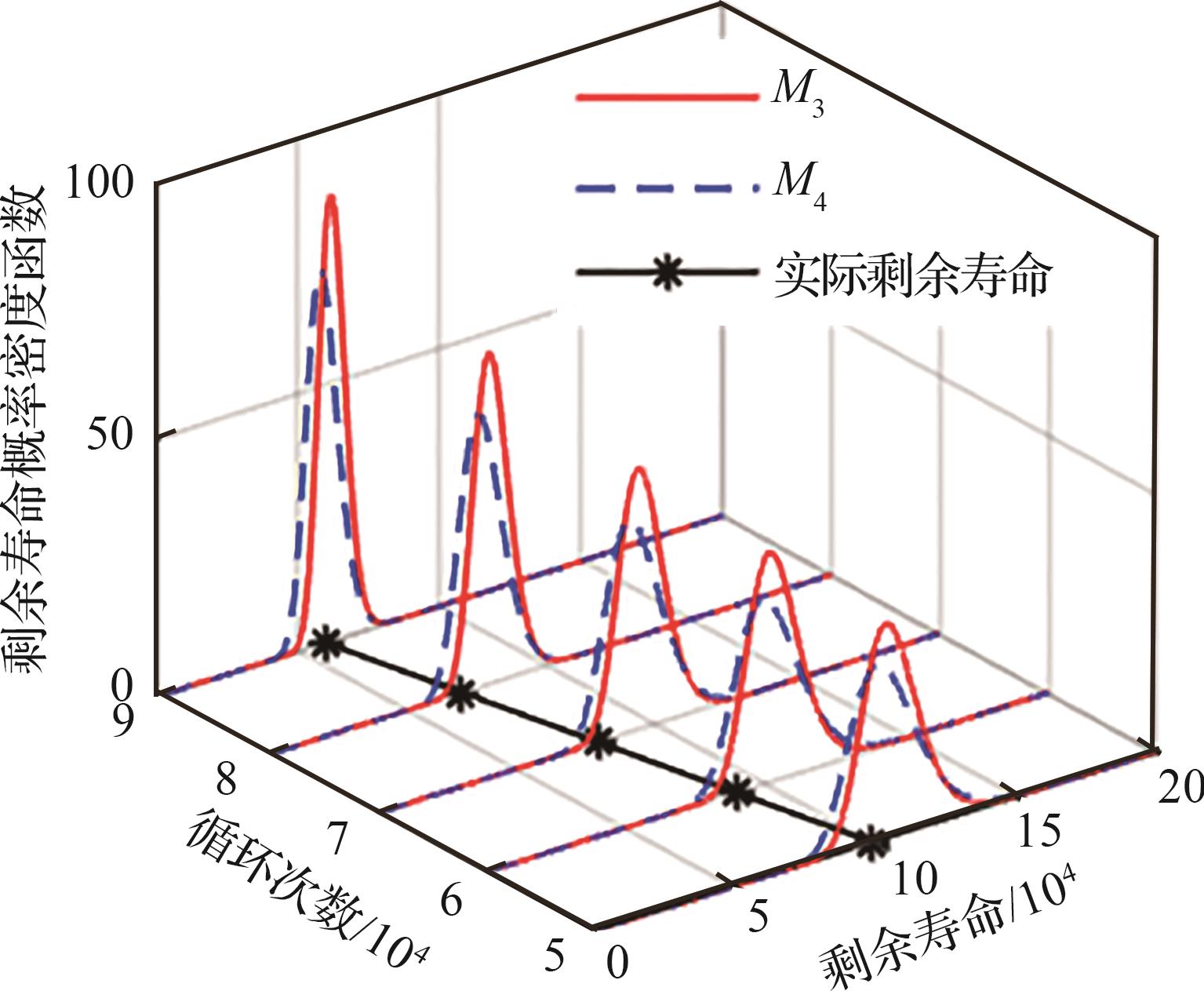
Fig.22
MSE of remaining useful life of M3 and M4

| 1 | YAN B, MA X, YANG L, et al. A novel degradation-rate-volatility related effect Wiener process model with its extension to accelerated ageing data analysis[J]. Reliability Engineering & System Safety, 2020, 204: 107138. |
| 2 | TANG S J, GUO X S, YU C Q, et al. Real time remaining useful life prediction based on nonlinear Wiener based degradation processes with measurement errors[J]. Journal of Central South University, 2014, 21(12): 4509-4517. |
| 3 | HU J W, SUN Q Z, YE Z S, et al. Joint modeling of degradation and lifetime data for RUL prediction of deteriorating products[J]. IEEE Transactions on Industrial Informatics, 2021, 17(7): 4521-4531. |
| 4 | 李天梅, 司小胜, 张建勋. 多源传感监测线性退化设备数模联动的剩余寿命预测方法[J]. 航空学报, 2023, 44(8): 227190. |
| LI T M, SI X S, ZHANG J X. Data-model interactive remaining useful life prediction method for multi-sensor monitored linear stochastic degrading devices[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(8): 227190 (in Chinese). | |
| 5 | HU G, XU Z Q, WANG G R, et al. Forecasting energy consumption of long-distance oil products pipeline based on improved fruit fly optimization algorithm and support vector regression[J]. Energy, 2021, 224: 120153. |
| 6 | LIU D, WANG S Q. Reliability estimation from lifetime testing data and degradation testing data with measurement error based on evidential variable and Wiener process[J]. Reliability Engineering & System Safety, 2021, 205: 107231. |
| 7 | WANG X, WANG B X, JIANG P H, et al. Accurate reliability inference based on Wiener process with random effects for degradation data[J]. Reliability Engineering & System Safety, 2020, 193: 106631. |
| 8 | ZHENG Z X, SI X S, HU C H, et al. Degradation data analysis and remaining useful life estimation: A review on Wiener-process-based methods[J]. European Journal of Operational Research, 2018, 271(3): 775-796. |
| 9 | SI X S, WANG W B, HU C H, et al. A Wiener-process-based degradation model with a recursive filter algorithm for remaining useful life estimation[J]. Mechanical Systems and Signal Processing, 2013, 35(1-2): 219-237. |
| 10 | 李天梅,司小胜,刘翔,等.大数据下数模联动的随机退化设备剩余寿命预测技术[J].自动化学报,2022,48(9):2119-2141. |
| LI T M, SI X S, LIU X, et al. Data-model interactive remaining useful life prediction technologies for stochastic degrading devices with big data[J]. Acta Automatica Sinica,2022,48(9):2119-2141 (in Chinese). | |
| 11 | GEBRAEEL N Z, LAWLEY M A, LI R, et al. Residual-life distributions from component degradation signals: A Bayesian approach[J]. IIE Transactions, 2005, 37(6): 543-557. |
| 12 | BIAN L K, GEBRAEEL N. Computing and updating the first-passage time distribution for randomly evolving degradation signals[J]. IIE Transactions, 2012, 44(11): 974-987. |
| 13 | GEBRAEEL N, ELWANY A, PAN J. Residual life predictions in the absence of prior degradation knowledge[J]. IEEE Transactions on Reliability, 2009, 58(1): 106-117. |
| 14 | TSAI C C, TSENG S T, BALAKRISHNAN N. Mis-specification analyses of gamma and Wiener degradation processes[J]. Journal of Statistical Planning and Inference, 2011, 141(12): 3725-3735. |
| 15 | PENG W, LI Y F, YANG Y J, et al. Inverse Gaussian process models for degradation analysis: A Bayesian perspective[J]. Reliability Engineering & System Safety, 2014, 130: 175-189. |
| 16 | 任子强, 司小胜, 胡昌华, 等. 融合多传感器数据的发动机剩余寿命预测方法[J]. 航空学报, 2019, 40(12): 223312. |
| REN Z Q, SI X S, HU C H, et al. Remaining useful life prediction method for engine combining multi-sensors data[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(12): 223312 (in Chinese). | |
| 17 | LIU D, WANG S, ZHANG C. Reliability estimation by fusing multiple-source information based on evidential variable and Wiener process[J]. Computers & Industrial Engineering, 2021, 162: 107745. |
| 18 | 董青,郑建飞,胡昌华,等.考虑随机冲击影响的自适应Wiener过程剩余寿命预测方法[J].航空学报,2022,43(9): 225914. |
| DONG Q, ZHENG J F, HU C H, et al. Remaining useful life prediction for adaptive Wiener process method with random shock [J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(9): 225914 (in Chinese). | |
| 19 | 杨家鑫, 唐圣金, 李良, 等. 基于隐含非线性维纳退化过程的剩余寿命预测[J/OL]. 北京航空航天大学学报, (2022-05-30) [2022-06-22]. . |
| YANG J X, TANG S J, LI L, et al. Remaining useful life prediction based on implicit nonlinear Wiener degradation process [J/OL]. Journal of Beijing University of Aeronautics and Astronautics, (2022-05-30) [2022-06-22]. (in Chinese). | |
| 20 | 郑建飞, 胡昌华, 司小胜, 等. 考虑不确定测量和个体差异的非线性随机退化系统剩余寿命估计[J]. 自动化学报, 2017, 43(2): 259-270. |
| ZHENG J F, HU C H, SI X S, et al. Remaining useful life estimation for nonlinear stochastic degrading systems with uncertain measurement and unit-to-unit variability[J]. Acta Automatica Sinica, 2017, 43(2): 259-270 (in Chinese). | |
| 21 | SI X S, WANG W B, CHEN M Y, et al. A degradation path-dependent approach for remaining useful life estimation with an exact and closed-form solution[J]. European Journal of Operational Research, 2013, 226(1): 53-66. |
| 22 | WANG W, CARR M, XU W, et al. A model for residual life prediction based on Brownian motion with an adaptive drift[J]. Microelectronics Reliability, 2011, 51(2): 285-293. |
| 23 | WANG X, HU C H, SI X S, et al. An adaptive prognostic approach for newly developed system with three-source variability[J]. IEEE Access, 2019, 7: 53091-53102. |
| 24 | SI X S. An adaptive prognostic approach via nonlinear degradation modeling: Application to battery data[J]. IEEE Transactions on Industrial Electronics, 2015, 62(8): 5082-5096. |
| 25 | HUANG Z Y, XU Z G, WANG W H, et al. Remaining useful life prediction for a nonlinear heterogeneous Wiener process model with an adaptive drift[J]. IEEE Transactions on Reliability, 2015, 64(2): 687-700. |
| 26 | FENG L, WANG H L, SI X S, et al. A state-space-based prognostic model for hidden and age-dependent nonlinear degradation process[J]. IEEE Transactions on Automation Science and Engineering, 2013, 10(4): 1072-1086. |
| 27 | TANG S J, YU C Q, WANG X, et al. Remaining useful life prediction of lithium-ion batteries based on the Wiener process with measurement error[J]. Energies, 2014, 7(2): 520-547. |
| 28 | CAI Z Y, CHEN Y X, ZHANG Q, et al. Residual lifetime prediction model of nonlinear accelerated degradation data with measurement error[J]. Journal of Systems Engineering and Electronics, 2017, 28(5): 1028-1038. |
| 29 | TANG S J, XU X D, YU C Q, et al. Remaining useful life prediction with fusing failure time data and field degradation data with random effects[J]. IEEE Access, 2019, 8: 11964-11978. |
| 30 | WANG L, PAN R, LI X, et al. A Bayesian reliability evaluation method with integrated accelerated degradation testing and field information[J]. Reliability Engineering & System Safety, 2013, 112: 38-47. |
| 31 | PANG Z N, SI X S, HU C H, et al. A Bayesian inference for remaining useful life estimation by fusing accelerated degradation data and condition monitoring data[J]. Reliability Engineering & System Safety, 2021, 208: 107341. |
| 32 | ZHANG Y, JIA X, GUO B. Bayesian framework for satellite rechargeable lithium battery synthesizing bivariate degradation and lifetime data[J]. Journal of Central South University, 2018, 25(2): 418-431. |
| 33 | TANG S J, WANG W F, SUN X Y, et al. Unbiased parameters estimation and mis-specification analysis of Wiener process-based degradation model with random effects[J]. Applied Mathematical Modelling, 2022, 109: 134-160. |
| 34 | 王凤飞, 唐圣金, 孙晓艳, 等. 考虑随机效应的多源信息融合剩余寿命预测[J/OL]. 北京航空航天大学学报, (2022-03-01) [2022-06-22]. . |
| WANG F F, TANG S J, SUN X Y, et al. Remaining useful life prediction based on multi source information with considering random effects [J/OL]. Journal of Beijing University of Aeronautics and Astronautics, (2022-03-01) [2022-06-22]. (in Chinese). | |
| 35 | CAI Z Y, WANG Z Z, CHEN Y X, et al. Remaining useful lifetime prediction for equipment based on nonlinear implicit degradation modeling[J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 194-205. |
| 36 | SI X S, WANG W B, HU C H, et al. Estimating remaining useful life with three-source variability in degradation modeling[J]. IEEE Transactions on Reliability, 2014, 63(1): 167-190. |
| 37 | TANG S J, GUO X S, ZHOU Z J. Mis-specification analysis of linear Wiener process-based degradation models for the remaining useful life estimation[J]. Proceedings of the Institution of Mechanical Engineers, Part O: Journal of Risk and Reliability, 2014, 228(5): 478-487. |
| 38 | YANG J X, TANG S J, FANG P Y, et al. Remaining useful life prediction of implicit linear Wiener degradation process based on multi-source information[J/OL]. Proceedings of the Institution of Mechanical Engineers, Part O: Journal of Risk and Reliability, (2022-11-19) [2022-11-20], . |
| 39 | YE Z S, WANG Y, TSUI K L, et al. Degradation data analysis using Wiener processes with measurement errors[J]. IEEE Transactions on Reliability, 2013, 62(4): 772-780. |
| 40 | HAN Y Y, MA C L, TANG S J, et al. Residual life estimation of lithium-ion batteries based on nonlinear Wiener process with measurement error[J]. Proceedings of the Institution of Mechanical Engineers, Part O: Journal of Risk and Reliability, 2023, 237(1): 133-151. |
| 41 | 万昌豪, 刘志国, 唐圣金, 等. 基于不完美先验信息的随机系数回归模型剩余寿命预测方法[J]. 北京航空航天大学学报, 2021, 47(12): 2542-2551. |
| WAN C H, LIU Z G, TANG S J, et al. Remaining useful life prediction method based on random coefficient regression model with imperfect prior information[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(12): 2542-2551 (in Chinese). | |
| 42 | PENG C Y, TSENG S T. Mis-specification analysis of linear degradation models[J]. IEEE Transactions on Reliability, 2009, 58(3): 444-455. |
| 43 | HONG S, YUE T Y, LIU H. Vehicle energy system active defense: A health assessment of lithium-ion batteries[J]. International Journal of Intelligent Systems, 2022, 37(12): 10081-10099. |
| 44 | JIN G, MATTHEWS D E, ZHOU Z. A Bayesian framework for on-line degradation assessment and residual life prediction of secondary batteries inspacecraft[J]. Reliability Engineering & System Safety, 2013, 113: 7-20. |
| 45 | LU C J, MEEKER W O. Using degradation measures to estimate a time-to-failure distribution[J]. Technometrics, 1993, 35(2): 161-174. |
| 46 | WANG X, BALAKRISHNAN N, GUO B. Residual life estimation based on a generalized Wiener degradation process[J]. Reliability Engineering & System Safety, 2014, 124: 13-23. |
| [1] | Yuan SONG, Rui LI, Zhigang HUANG. Allocation method of RTK integrity indicators [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331655-331655. |
| [2] | Yanheng GUO, Neng WAN, Qixin ZHUANG, Bo LIU, Xinxin LI, Dao WANG. Optimization method for five⁃axis on⁃machine measurement path based on error distribution graph [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(13): 629261-629261. |
| [3] | Junqiu YIN, Yunpeng LIU, Xiaobin TANG. Spacecraft positioning method based on pulsar-like X-ray beacon [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(3): 526596-526596. |
| [4] | Zebo ZHOU, Zeliang ZHANG, Xin PENG, Gun LI, Yang TAO, Liangquan WANG, Xin LUO. Multi-UAV decentralized cooperative navigation method based on memory-fusion [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628440-628440. |
| [5] | Tao WANG, Xuefeng GAO, Jinping ZHU, Song DONG, Lianjun SUN, Kan ZHENG. Chatter online monitoring of robotic longitudinal⁃torsional ultrasonic edge trimming [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(13): 262-272. |
| [6] | ZHANG Shengfei, LI Tianmei, HU Changhua, DU Dangbo, SI Xiaosheng. Missing data generation method and its application in remaining useful life prediction based on deep convolutional generative adversarial network [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 225708-225708. |
| [7] | MU Hanxiao, ZHENG Jianfei, HU Changhua, ZHAO Ruixing, DONG Qing. Remaining useful life prediction of multivariate degradation equipment based on CDBN and BiLSTM [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(7): 325403-325403. |
| [8] | YIN Dongliang, HUANG Xiaoying, WU Yanjie, HE Youchen, XIE Jingwei. Target recognition decision method based on cloud model and improved D-S evidence theory [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(12): 324768-324768. |
| [9] | WANG Wei, XING Chaoyang, FENG Wenshuai. State of the art and perspectives of autonomous navigation technology [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 525049-525049. |
| [10] | REN Ziqiang, SI Xiaosheng, HU Changhua, WANG Xi. Remaining useful life prediction method for engine combining multi-sensors data [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2019, 40(12): 223312-223312. |
| [11] | SUN Dianxing, WANG Guohong, SHENG Dan. Phantom track jamming recognition based on mean-covariance collaborative testing [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2016, 37(4): 1292-1304. |
| [12] | YAO Yu, ZHENG Tianyu, HE Fenghua, WANG Long, WANG Yang, ZHANG Xi, ZHU Baiyang, YANG Baoqing. Several hot issues and challenges in terminal guidance of flight vehicles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2015, 36(8): 2696-2716. |
| [13] | CUI Naigang, ZHANG Long, WANG Xiaogang, YANG Feng, LU Baogang. Application of adaptive high-degree cubature Kalman filter in target tracking [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2015, 36(12): 3885-3895. |
| [14] | YUE Yazhou, LI Sihai, ZHANG Yachong, LIU Zhenbo, WANG Jue. Differential Inertial Filter Design and Performance Analysis for Estimation of Misalignment Angle Between Airborne Master INS and Slave INS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2013, 34(10): 2402-2410. |
| [15] | Zhao Lin;Ding Jicheng;Sun Ming;Shu Yu. Bit Synchronization and Carrier Tracking for Very Weak GPS Signals [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2010, 31(6): 1204-1212. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341