Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (20): 628440-628440.doi: 10.7527/S1000-6893.2023.28440
• special column • Previous Articles Next Articles
Zebo ZHOU1( ), Zeliang ZHANG1, Xin PENG2, Gun LI1, Yang TAO2, Liangquan WANG2, Xin LUO1
), Zeliang ZHANG1, Xin PENG2, Gun LI1, Yang TAO2, Liangquan WANG2, Xin LUO1
Received:2022-12-29
Revised:2023-03-23
Accepted:2023-07-03
Online:2023-10-25
Published:2023-06-06
Contact:
Zebo ZHOU
E-mail:klinsmann.zhou@uestc.edu.cn
Supported by:CLC Number:
Zebo ZHOU, Zeliang ZHANG, Xin PENG, Gun LI, Yang TAO, Liangquan WANG, Xin LUO. Multi-UAV decentralized cooperative navigation method based on memory-fusion[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628440-628440.
Fig.1
Schematic of UAV communication delay


Fig.2
Multi-UAV ranging topology

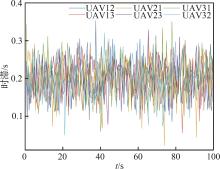
Fig.3
Simulation results of communication time delay between UAV

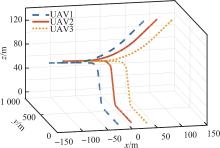
Fig.4
Trajectory of multi-UAV
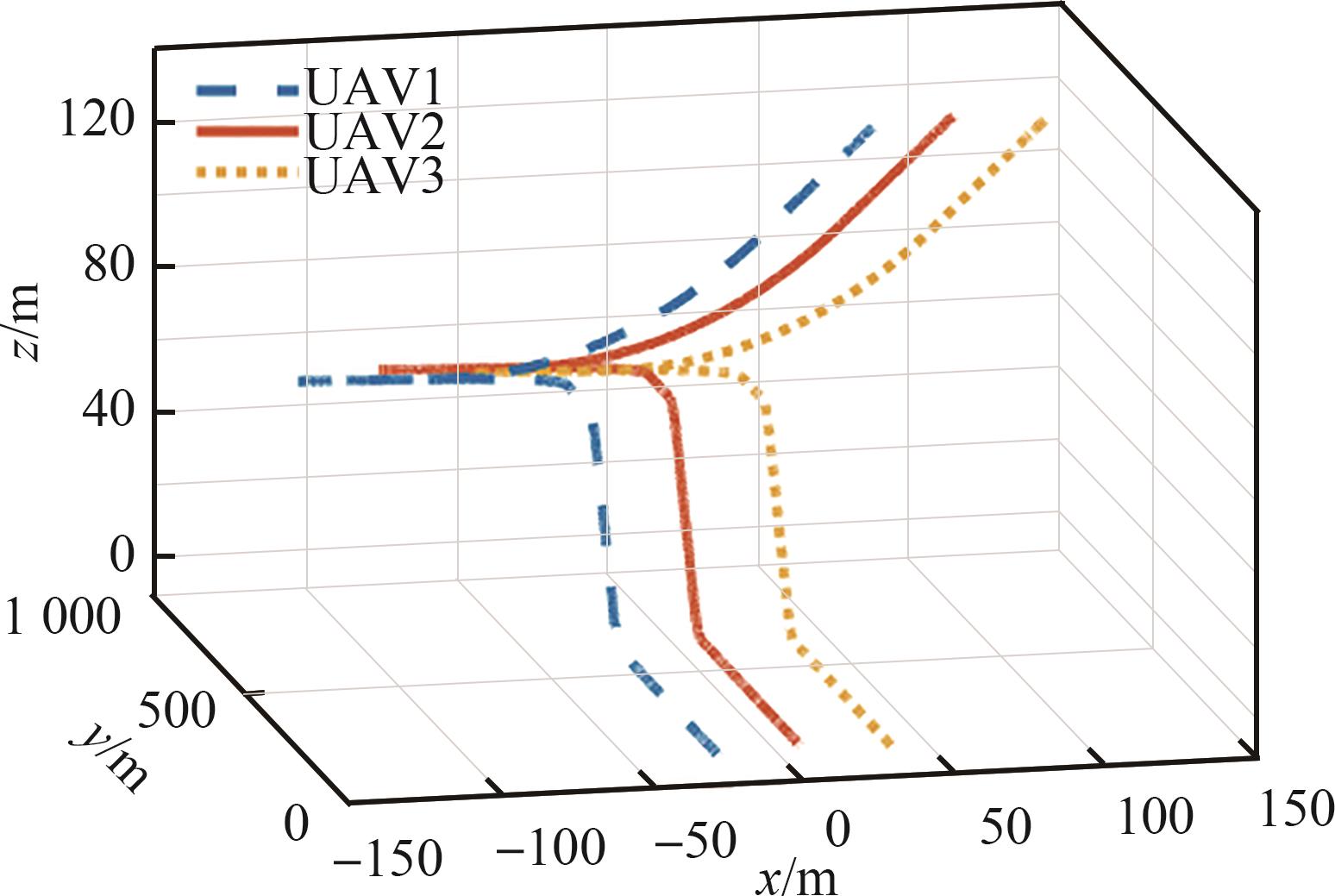

Fig.5
Attitude, velocity, and position errors of NDCN, DEKF and MDCN in GNSS denied case in simulation experiments
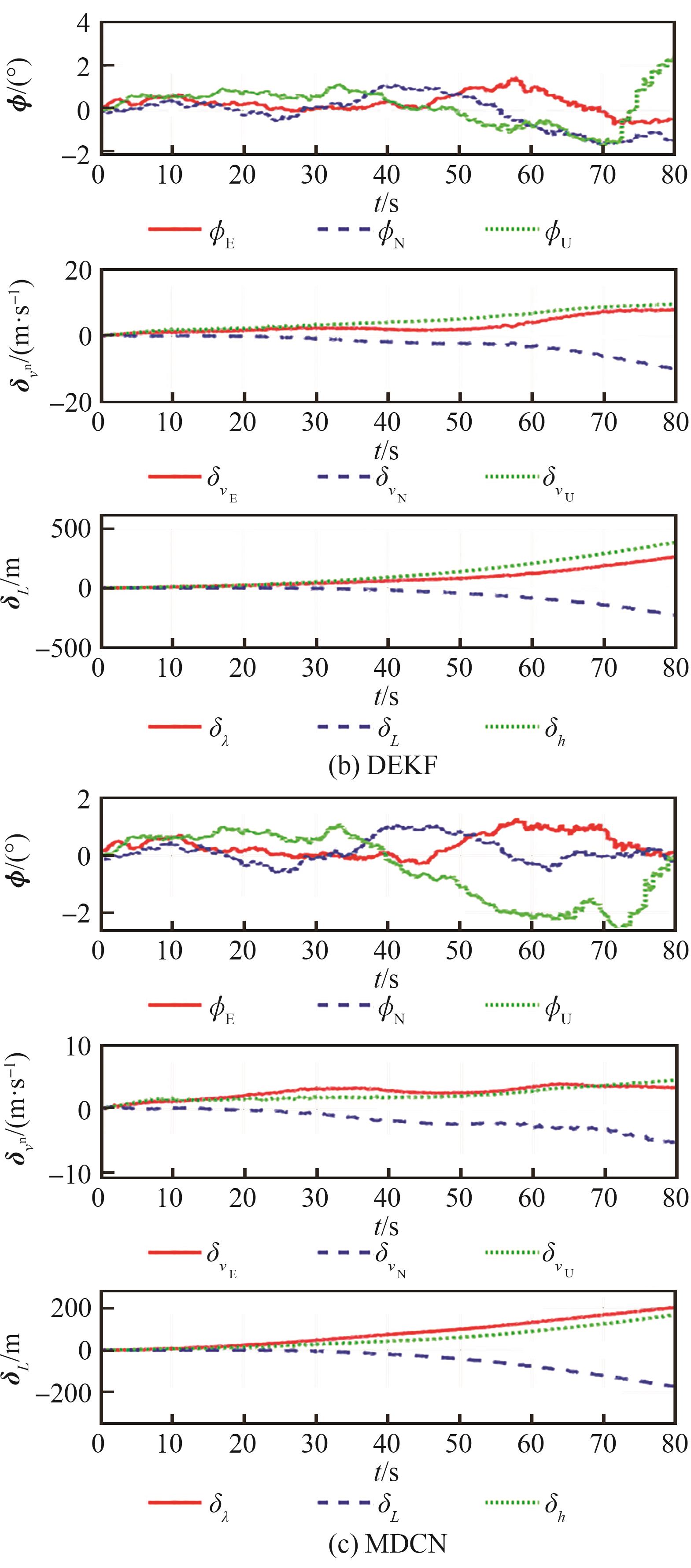
Table 1
RMSE of UAV1 in GNSS denied case (simulation experiments)
| 算法 | 俯仰角/(°) | 滚转角/(°) | 偏航角/(°) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| NDCN | 5.02 | 2.41 | 2.27 | 22.90 | 23.40 | 8.40 | 457.4 | 1 222 | 346.5 |
| DEKF | 0.56 | 0.86 | 1.38 | 5.76 | 6.61 | 6.87 | 188.4 | 179.1 | 263.9 |
| MDCN | 0.53 | 0.41 | 1.19 | 2.97 | 3.94 | 3.19 | 140.4 | 127.1 | 117.4 |

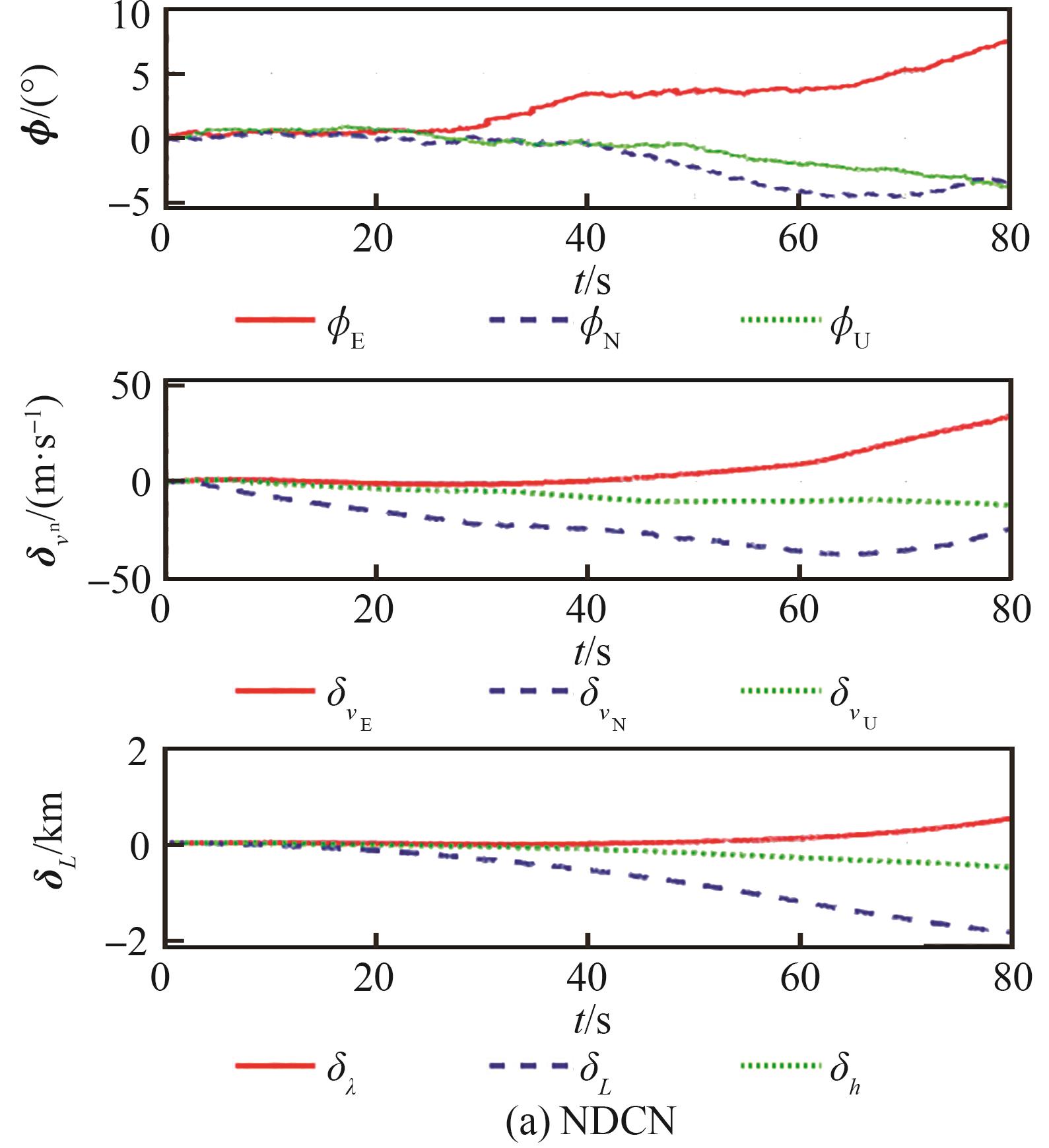
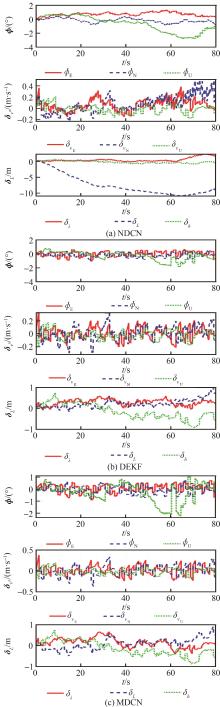
Fig.6
Attitude, velocity, and position errors of NDCN, DEKF, and MDCN in GNSS-accessible case in simulation experiments
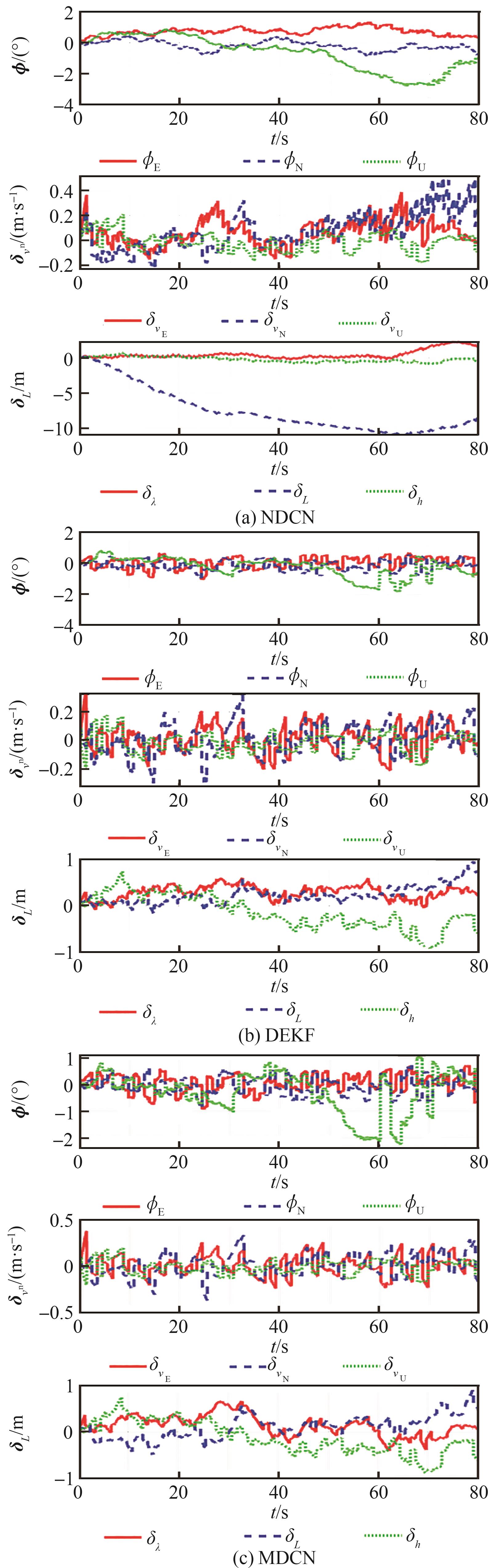
Table 2
RMSE of UAV1 in GNSS-accessible case (simulation experiments)
| 算法 | 俯仰角/(°) | 滚转角/(°) | 偏航角/(°) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| NDCN | 0.77 | 0.39 | 1.53 | 0.11 | 0.18 | 0.08 | 1.00 | 7.96 | 0.40 |
| DEKF | 0.39 | 0.35 | 1.09 | 0.10 | 0.10 | 0.07 | 0.33 | 0.38 | 0.37 |
| MDCN | 0.36 | 0.35 | 0.99 | 0.11 | 0.12 | 0.07 | 0.28 | 0.29 | 0.36 |

Fig.7
UAV used in flight test
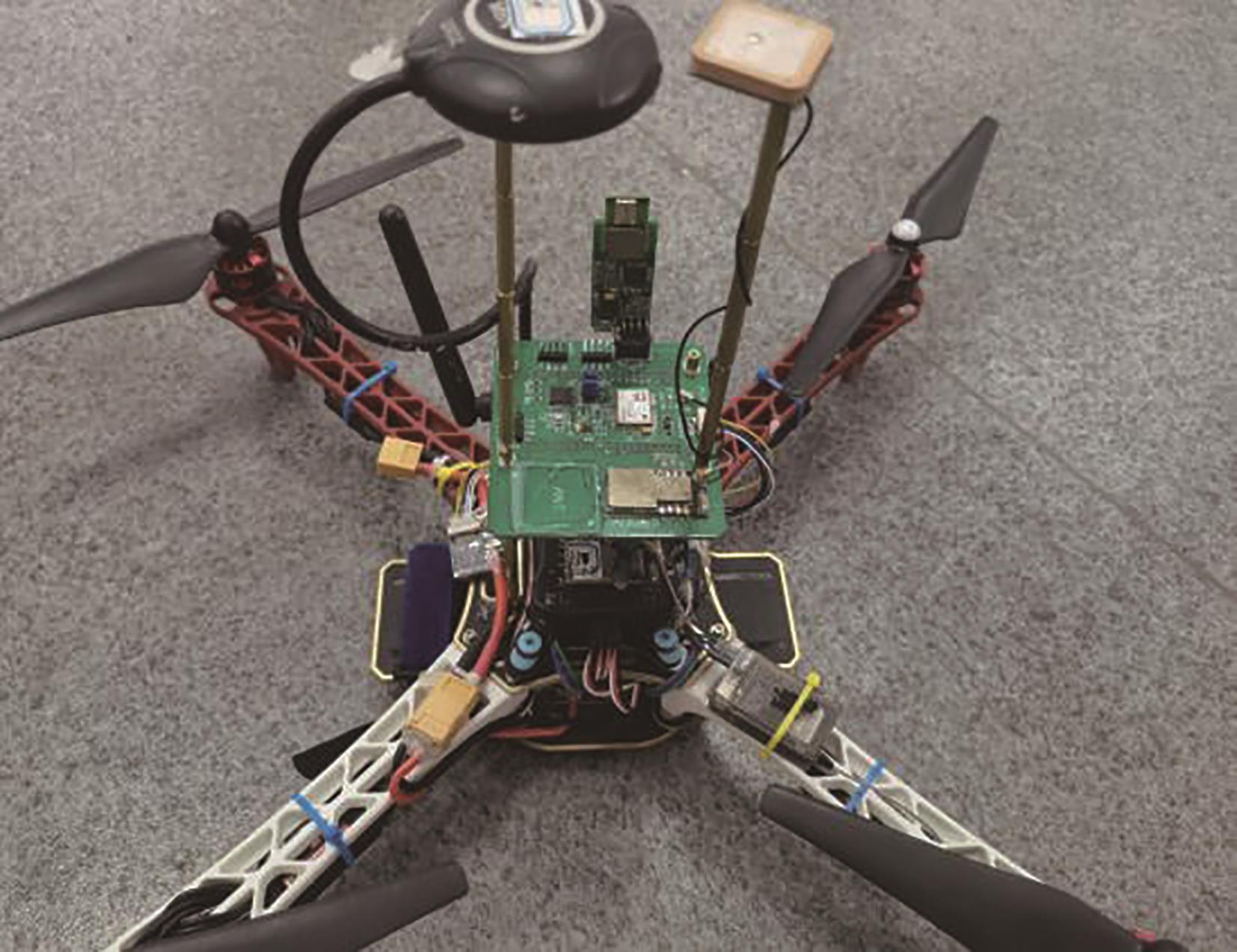

Fig.8
Flight test scene

Fig.9
Movement trajectories of multi-UAV
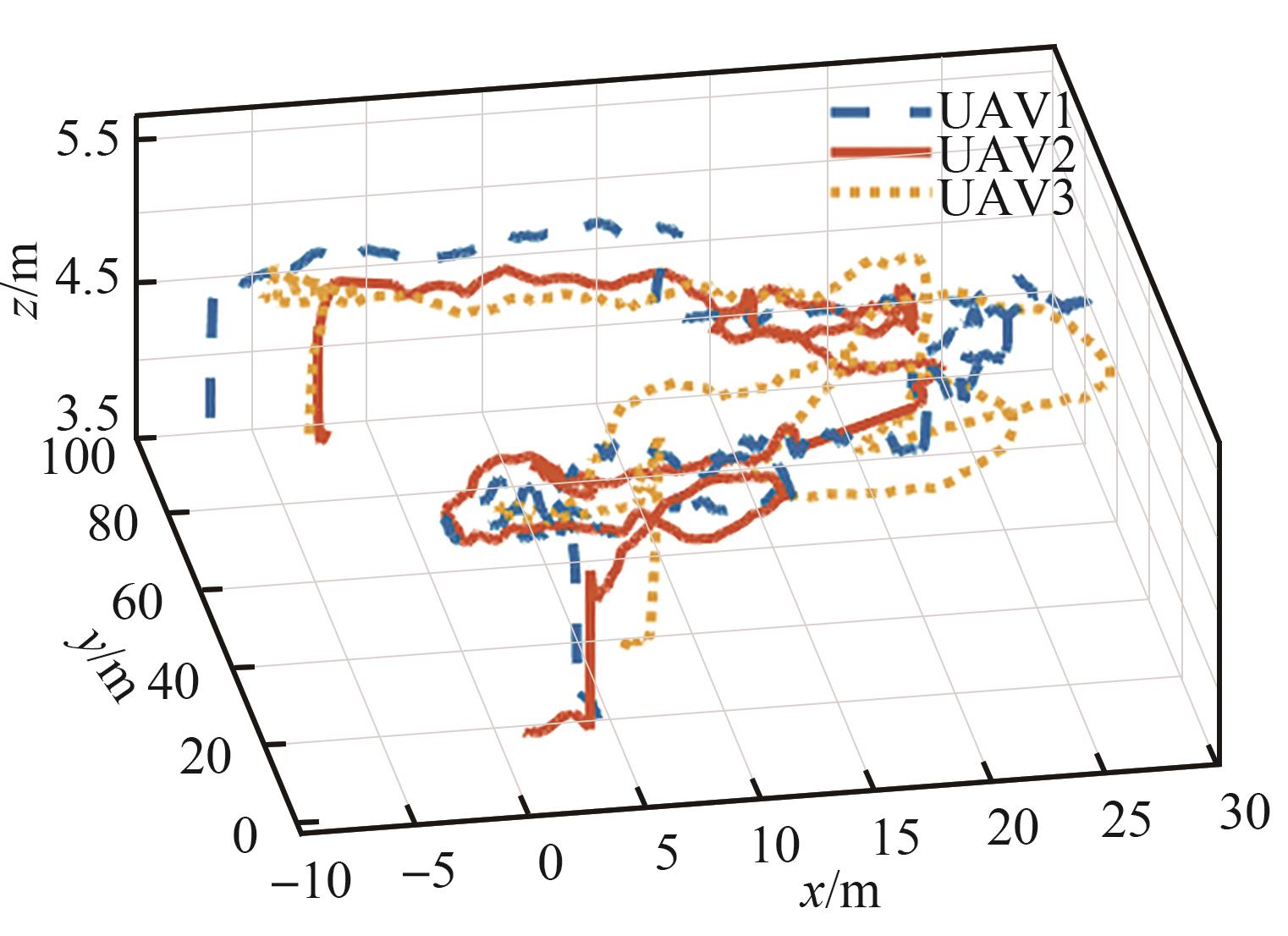
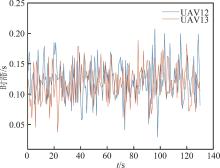
Fig.10
Communication delay of UAV1
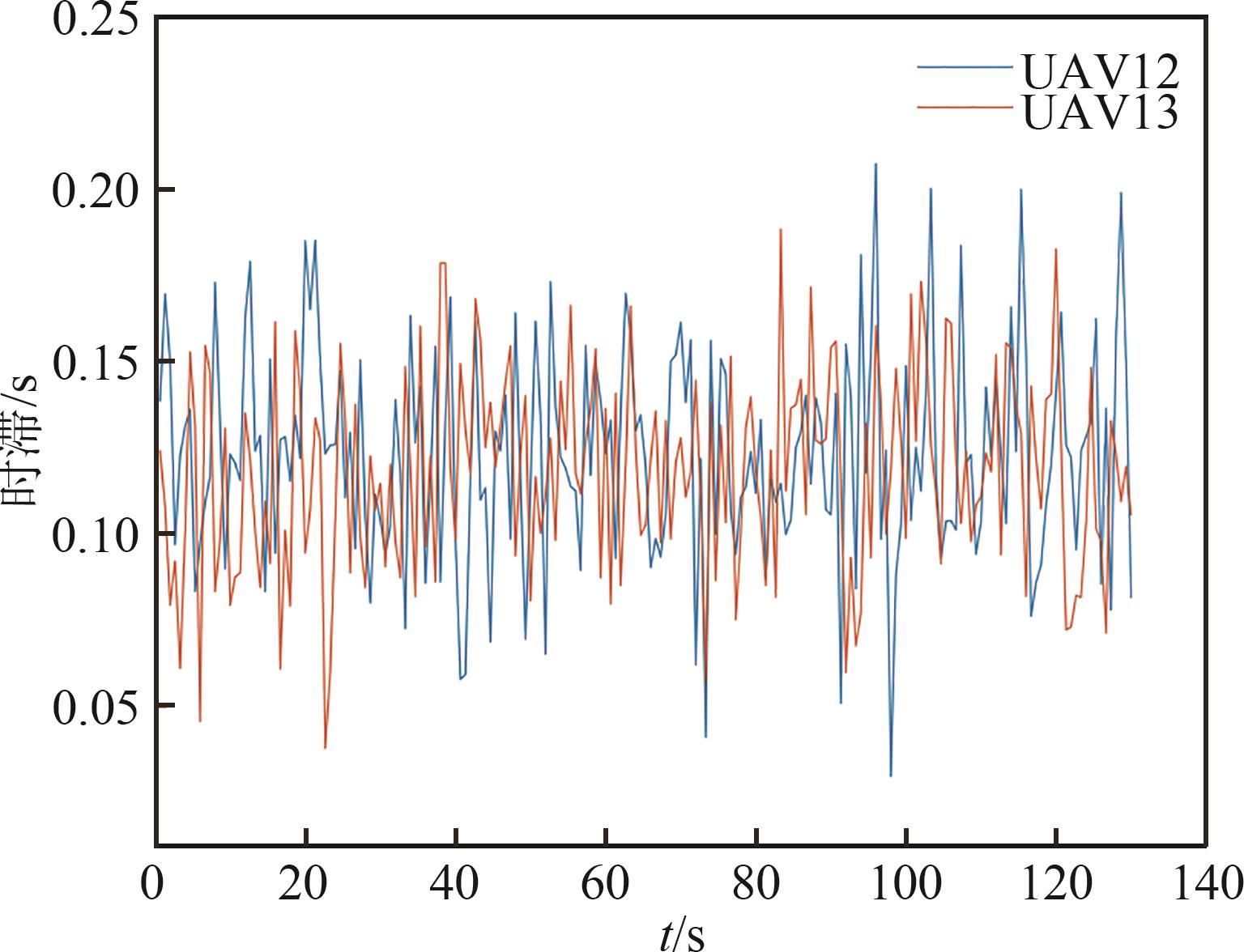

Fig.11
Attitude, velocity, and position errors of NDCN, DEKF, and MDCN in GNSS denied case in real flight tests
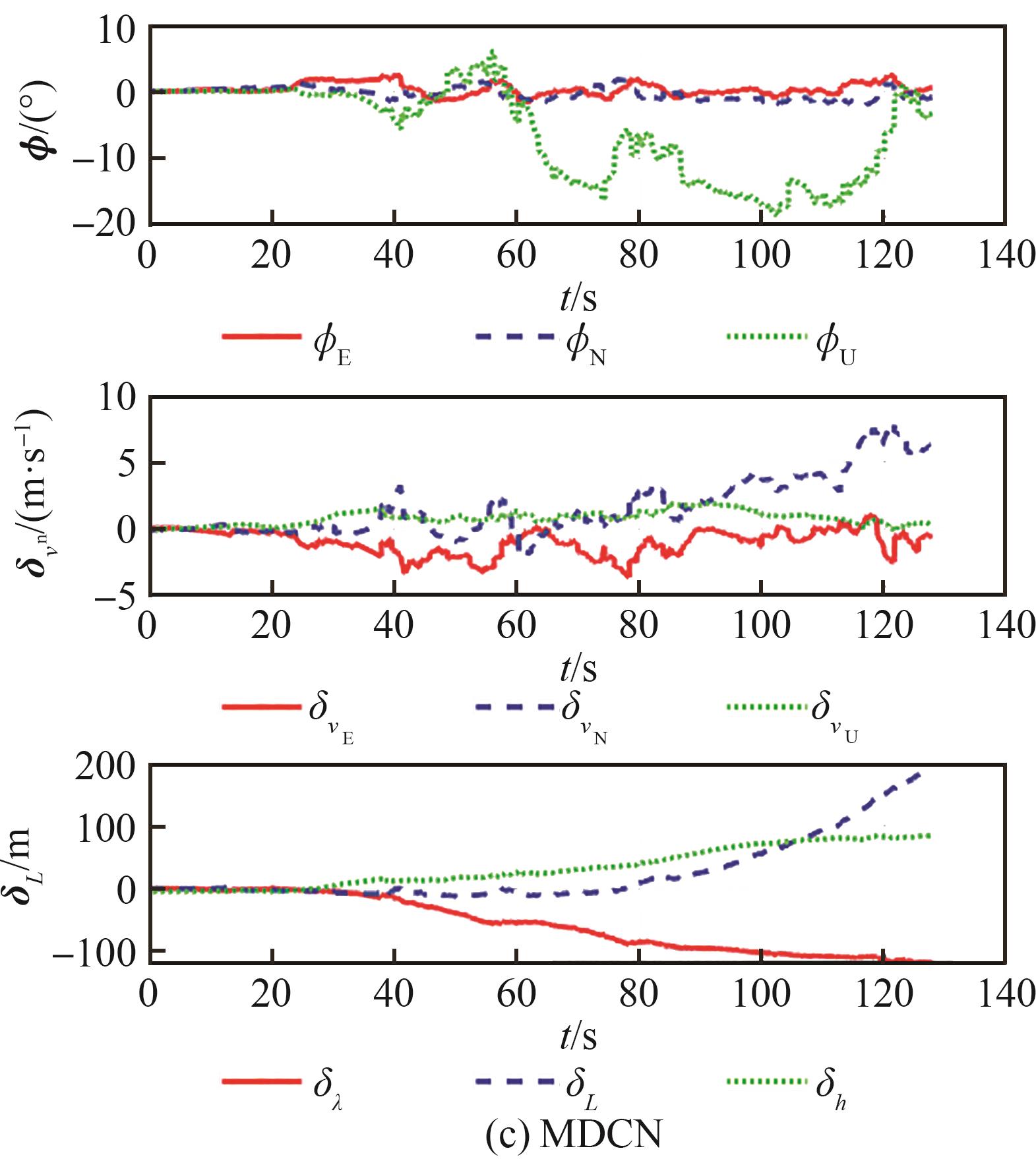
Table 3
RMSE for UAV1 in GNSS denied case (real flight tests)
| 算法 | 俯仰角/(°) | 滚转角/(°) | 偏航角/(°) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| NDCN | 1.13 | 0.77 | 11.97 | 2.95 | 5.80 | 1.34 | 136.2 | 178.7 | 68.8 |
| DEKF | 1.08 | 0.93 | 9.54 | 1.49 | 3.53 | 2.23 | 78.3 | 85.4 | 109.7 |
| MDCN | 0.99 | 0.95 | 9.11 | 1.33 | 2.76 | 0.95 | 72.3 | 60.2 | 45.8 |
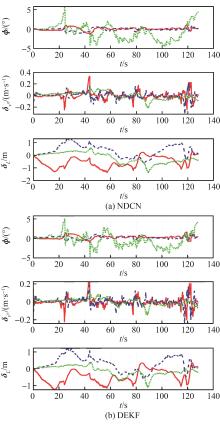
Fig.12
Attitude, velocity, and position errors of NDCN, DEKF, and MDCN in GNSS-accessible case in real flight tests
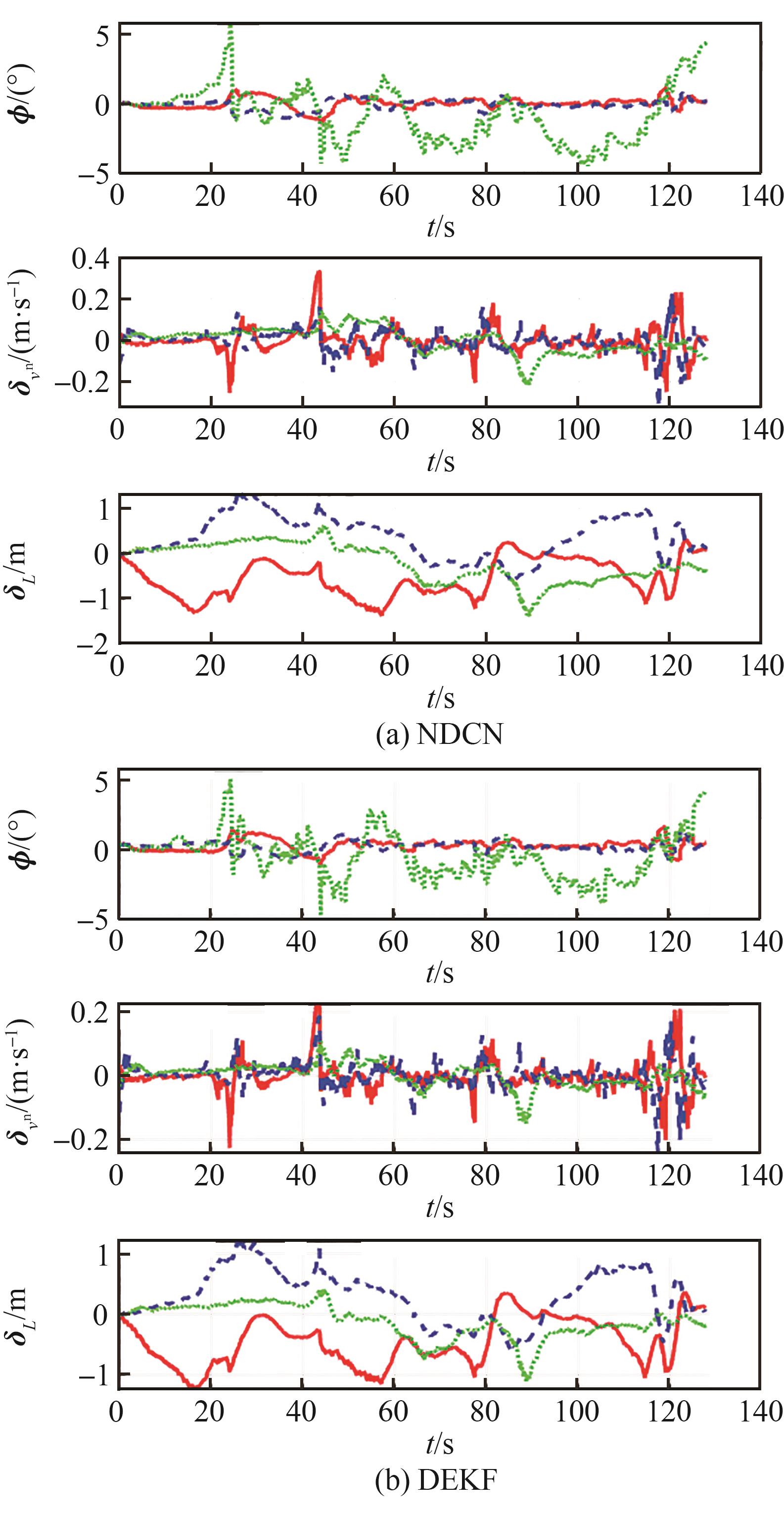
Table 4
RMSE for UAV1 in GNSS-accessible case (real flight tests)
| 算法 | 俯仰角/(°) | 滚转角/(°) | 偏航角/(°) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| NDCN | 0.40 | 0.38 | 2.10 | 0.055 | 0.049 | 0.060 | 0.68 | 0.59 | 0.46 |
| DEKF | 0.39 | 0.37 | 1.69 | 0.040 | 0.038 | 0.035 | 0.59 | 0.51 | 0.30 |
| MDCN | 0.39 | 0.34 | 1.48 | 0.027 | 0.025 | 0.024 | 0.51 | 0.43 | 0.28 |
| 1 | 樊会涛, 闫俊. 空战体系的演变及发展趋势[J]. 航空学报, 2022, 43(10): 527397. |
| FAN H T, YAN J. Evolution and development trend of air combat system[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(10): 527397 (in Chinese). | |
| 2 | 蔺玺坤, 梁晓龙, 任宝祥, 等. 基于模糊PID的无人机空中加油轨迹跟踪控制[J]. 兵器装备工程学报, 2022, 43(10): 18-26. |
| LIN X K, LIANG X L, REN B X, et al. Aerial refueling trajectory tracking control for UAV based on fuzzy PID[J]. Journal of Ordnance Equipment Engineering, 2022, 43(10): 18-26 (in Chinese). | |
| 3 | ZHANG, CAO. Cooperative localization approach for multi-robot systems based on state estimation error compensation[J]. Sensors, 2019, 19(18): 3842. |
| 4 | MA P, JI J, SUI J, et al. Research on cooperative formation flight control of multi-UAV with communication time delay[C]∥ 2021 International Conference on Control Science and Electric Power Systems (CSEPS). Piscataway: IEEE Press, 2021: 54-58. |
| 5 | YAN Z P, WANG L, WANG T D, et al. Polar cooperative navigation algorithm for multi-unmanned underwater vehicles considering communication delays[J]. Sensors, 2018, 18(4): 1044. |
| 6 | ZHOU S Q, REN J, HENG Y, et al. Distributed cooperative guidance for multi-missile system with time-varying delays and switching topologies[C]∥ 2020 39th Chinese Control Conference (CCC). Piscataway: IEEE Press, 2020: 3464-3470. |
| 7 | XU B, WANG X Y, GUO Y, et al. A novel adaptive filter for cooperative localization under time-varying delay and non-gaussian noise[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-15. |
| 8 | HU C Q, FU L, YANG Y Y. Cooperative navigation and control for surface-underwater autonomous marine vehicles[C]∥ 2017 IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC). Piscataway: IEEE Press, 2018: 589-592. |
| 9 | GOPALAKRISHNAN A, KAISARE N S, NARASIM HAN S. Incorporating delayed and infrequent measurements in extended Kalman filter based nonlinear state estimation[J]. Journal of Process Control, 2011, 21(1): 119-129. |
| 10 | 卢健, 陈旭, 罗毛欣, 等. 考虑通信延迟的多自治水下航行器协同定位算法[J]. 控制理论与应用, 2020, 37(9): 2061-2072. |
| LU J, CHEN X, LUO M X, et al. Cooperative localization algorithm considering of communication delay for autonomous underwater vehicles[J]. Control Theory & Applications, 2020, 37(9): 2061-2072 (in Chinese). | |
| 11 | XIAO G D, WANG B, DENG Z H, et al. An acoustic communication time delays compensation approach for master–slave AUV cooperative navigation[J]. IEEE Sensors Journal, 2017, 17(2): 504-513. |
| 12 | GAO W, YANG J, LIU J, et al. Moving horizon estimation for cooperation localization of multiple unmanned underwater vehicles with communication delay[C]∥ 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS. Piscataway: IEEE Press, 2014: 976-981. |
| 13 | 姚尧, 徐德民, 张立川, 等. 通信延迟下的多UUV协同定位: 基于航迹预测的实时更新算法[J]. 机器人, 2011, 33(2): 161-168. |
| YAO Y, XU D M, ZHANG L C, et al. Cooperative localization of multiple UUVs with communication delays-a real-time update method based on path prediction[J]. Robot, 2011, 33(2): 161-168 (in Chinese). | |
| 14 | 高伟, 杨建, 刘菊, 等. 考虑通信延迟的多水面无人艇协同定位算法[J]. 哈尔滨工程大学学报, 2013, 34(12): 1490-1496, 1513. |
| GAO W, YANG J, LIU J, et al. Cooperative location of multiple unmanned surface vessels(USVs) considering communication delay[J]. Journal of Harbin Engineering University, 2013, 34(12): 1490-1496, 1513 (in Chinese). | |
| 15 | YAO Y, XU D M, YAN W S. Cooperative localization with communication delays for MAUVs[C]∥ 2009 IEEE International Conference on Intelligent Computing and Intelligent Systems. Piscataway: IEEE Press, 2009: 244-249. |
| 16 | FENG P. Leader-follower cooperative navigation with communication delays for multi AUVs[C]∥ 2011 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC). Piscataway: IEEE Press, 2011: 1-5. |
| 17 | 王文佳, 孙睿智, 高伟, 等. 基于通信延迟误差补偿的协同导航算法[J]. 火力与指挥控制, 2014, 39(12): 27-30. |
| WANG W J, SUN R Z, GAO W, et al. Cooperative navigation based on error compensation of communication delays[J]. Fire Control & Command Control, 2014, 39(12): 27-30 (in Chinese). | |
| 18 | YANG H J, LI H, XIA Y Q, et al. Distributed Kalman filtering over sensor networks with transmission delays[J]. IEEE Transactions on Cybernetics, 2021, 51(11): 5511-5521. |
| 19 | LARSEN T D, ANDERSEN N A, RAVN O, et al. Incorporation of time delayed measurements in a discrete-time Kalman filter[C]∥ Proceedings of the 37th IEEE Conference on Decision and Control (Cat. No.98CH36171). Piscataway: IEEE Press, 2002: 3972-3977. |
| 20 | 严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019: 80-82. |
| YAN G M, WENG J. Strapdown inertial navigation algorithm and integrated navigation principle[M]. Xi'an: Northwestern Polytechnical University Press, 2019: 80-82 (in Chinese). | |
| 21 | 罗鑫. 复杂环境下的多无人机分散式协同导航技术研究[D]. 成都: 电子科技大学, 2022. |
| LUO X. Research on decentralized cooperative navigation technology of multiple UAVs in complex environment[D]. Chengdu: University of Electronic Science and Technology of China, 2022 (in Chinese). |
| [1] | Junqiu YIN, Yunpeng LIU, Xiaobin TANG. Spacecraft positioning method based on pulsar-like X-ray beacon [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(3): 526596-526596. |
| [2] | Jingxuan YUE, Hongru WANG, Dongqin ZHU, Chupalov ALEKSANDR. UAV formation cooperative navigation algorithm based on improved particle filter [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(14): 327995-327995. |
| [3] | Jiaxin YANG, Shengjin TANG, Liang LI, Xiaoyan SUN, Shuai QI, Xiaosheng SI. Remaining useful life prediction of implicit nonlinear Wiener degradation process based on multi-source information [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(12): 227662-227662. |
| [4] | CUI Naigang, ZHANG Long, WANG Xiaogang, YANG Feng, LU Baogang. Application of adaptive high-degree cubature Kalman filter in target tracking [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2015, 36(12): 3885-3895. |
| [5] | YUE Yazhou, LI Sihai, ZHANG Yachong, LIU Zhenbo, WANG Jue. Differential Inertial Filter Design and Performance Analysis for Estimation of Misalignment Angle Between Airborne Master INS and Slave INS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2013, 34(10): 2402-2410. |
| [6] | Zhao Lin;Ding Jicheng;Sun Ming;Shu Yu. Bit Synchronization and Carrier Tracking for Very Weak GPS Signals [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2010, 31(6): 1204-1212. |
| [7] | Han Ke;Jin Zhonghe;Wang Hao. Attitude Estimation and Coarse Sun Sensor Calibration for Pico-satellites [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2010, 31(5): 1038-1044. |
| [8] | Yang Limin;Su Weimin;Gu Hong. Analysis of Synthetical Ultra-wideband Range Profile and Velocity Based on Stepped Frequency During Pulse Trains [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2010, 31(10): 2046-2055. |
| [9] | Miao Yuhong;Zhou Jianghua. Stable Extended Kalman Filter for Attitude DeterminationBased on Observability Analysis [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2010, 31(1): 165-171. |
| [10] | Chen Xueqin;Wang Feng;Zhang Yingchun;Geng Yunhai. Application of Effectiveness Factors to Integrated FDD and FTC ofSatellite Attitude Control Systems [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2009, 30(3): 476-483. |
| [11] | Gong Xiaolin;Fang Jiancheng. Application of Modified Kalman Filtering Restraining Outliers Based onOrthogonality of Innovation to POS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2009, 30(12): 2348-2353. |
| [12] | Lu Feng;Huang Jinquan. Engine Component Performance Prognostics Based on Decision Fusion [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2009, 30(10): 1795-1800. |
| [13] | Cao Juanjuan;Fang Jiancheng;Sheng Wei;Tao Ye. Study and Application of Low-cost Multi-sensor Integrated Navigation for Small UAV Autonomous Flight [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2009, 30(10): 1923-1929. |
| [14] | FU Jian-guo;WANG Xiao-tong;MA Ye;JIN Liang-an. Study on Optimal Estimation Algorithm for Autonomous Attitude Determination [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2005, 26(5): 594-597. |
| [15] | SONG Hua;ZHANG Hong-yue. Sensor Fault Diagnosis Approach for Nonlinear Systems Based on Fuzzy Parity Equation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2003, 24(1): 62-65. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 272
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 591
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341