Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (9): 532499.doi: 10.7527/S1000-6893.2025.32499
• Special Issue: Safety Control Technology of Advanced Aircraft • Previous Articles Next Articles
Jie WANG1,2( ), Ming YANG3, Bailing TIAN4, Bohao LI5, Zhishi CHEN5
), Ming YANG3, Bailing TIAN4, Bohao LI5, Zhishi CHEN5
Received:2025-07-01
Revised:2025-08-11
Accepted:2025-12-29
Online:2026-05-15
Published:2026-01-15
Contact:
Jie WANG
E-mail:wang_jie@ustb.edu.cn
Supported by:CLC Number:
Jie WANG, Ming YANG, Bailing TIAN, Bohao LI, Zhishi CHEN. Dynamic event-triggered prescribed performance formation control for hypersonic morphing vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532499.

Fig.1
Variable configuration hypersonic glide vehicle
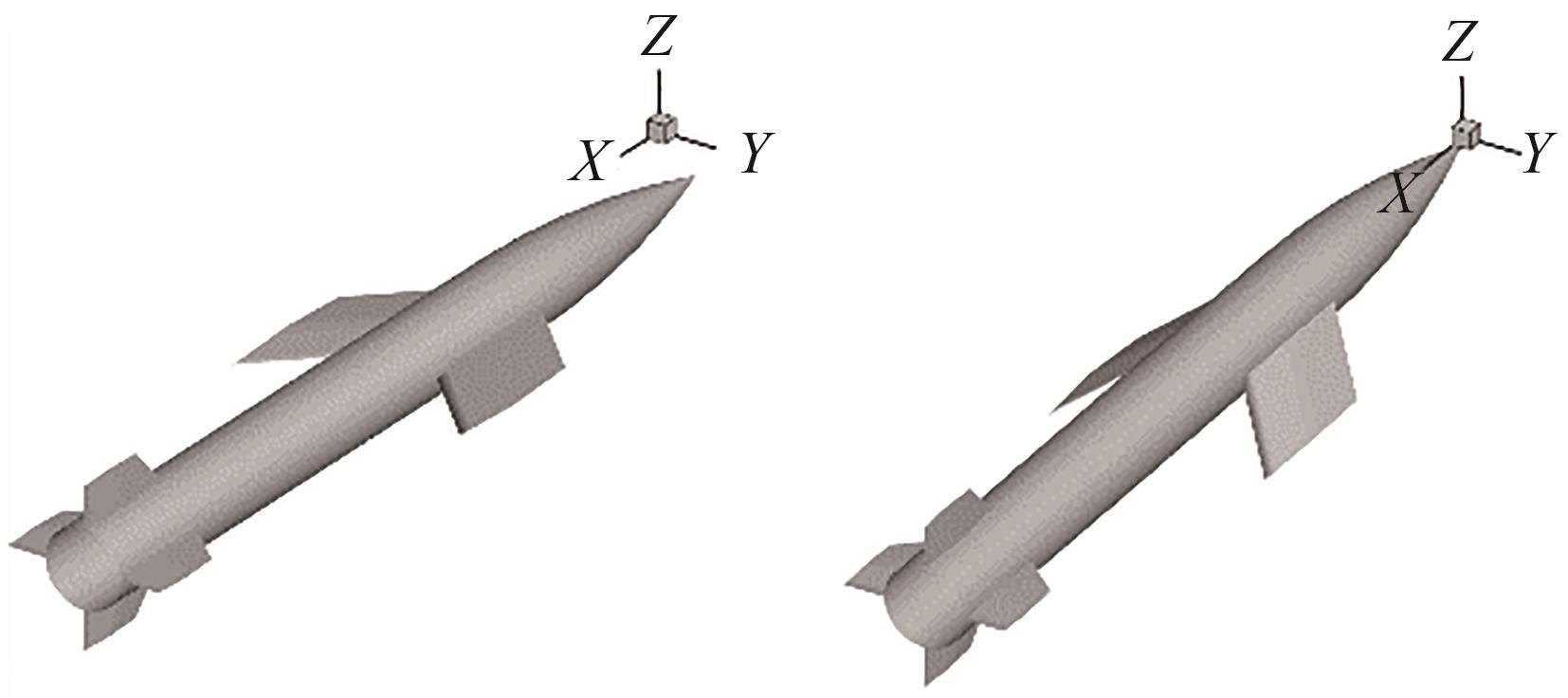
Table 1
Lift coefficient fitting results
| 外形类别 | ||||
|---|---|---|---|---|
| 外形1 | -0.400 4 | 4.896 | 1.218 0 | -0.421 6 |
| 外形2 | -0.438 0 | 5.667 | 1.615 0 | -0.437 3 |
| 外形3 | -0.400 9 | 4.873 | 0.331 4 | -0.168 2 |
Table 2
Drag coefficient fitting results
| 外形类别 | ||||
|---|---|---|---|---|
| 外形1 | 0.009 183 | 4.855 | 0.940 7 | -0.296 4 |
| 外形2 | 0.002 090 | 5.613 | 1.001 0 | -0.291 1 |
| 外形3 | 3.269 000 | 4.801 | -3.165 0 | 0.002 2 |
Table 3
Deformation time points and corresponding maximum lift-to-drag ratios
| 外形类别 | 时间/s | 折叠角/(°) | 最优升阻比 |
|---|---|---|---|
| 外形1 | 0~10 | 60 | 2.8 |
| 外形2 | 10~30 | 30 | 3.0 |
| 外形3 | 30~150 | 0 | 3.5 |

Fig. 2
Communication topology diagram
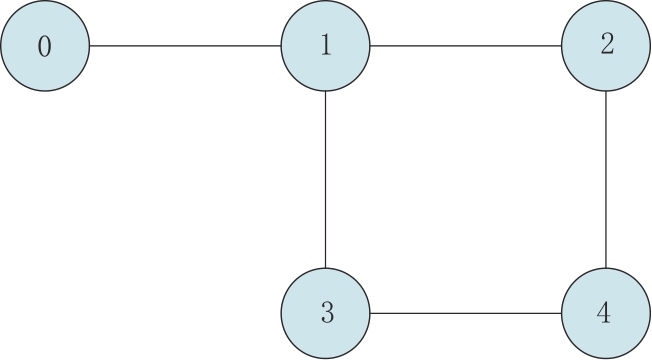
Table 4
Initial positions and desired relative distances
| 飞行器 | Δ | |||
|---|---|---|---|---|
| 飞行器1 | -500 | 30 000 | 0 | 1 000 |
| 飞行器2 | 500 | 30 000 | 0 | 500 |
| 飞行器3 | 0 | 30 500 | 0 | 0 |
| 飞行器4 | 0 | 31 000 | 0 | -500 |
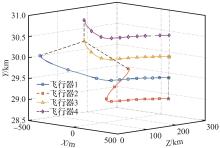
Fig.3
Flight trajectory
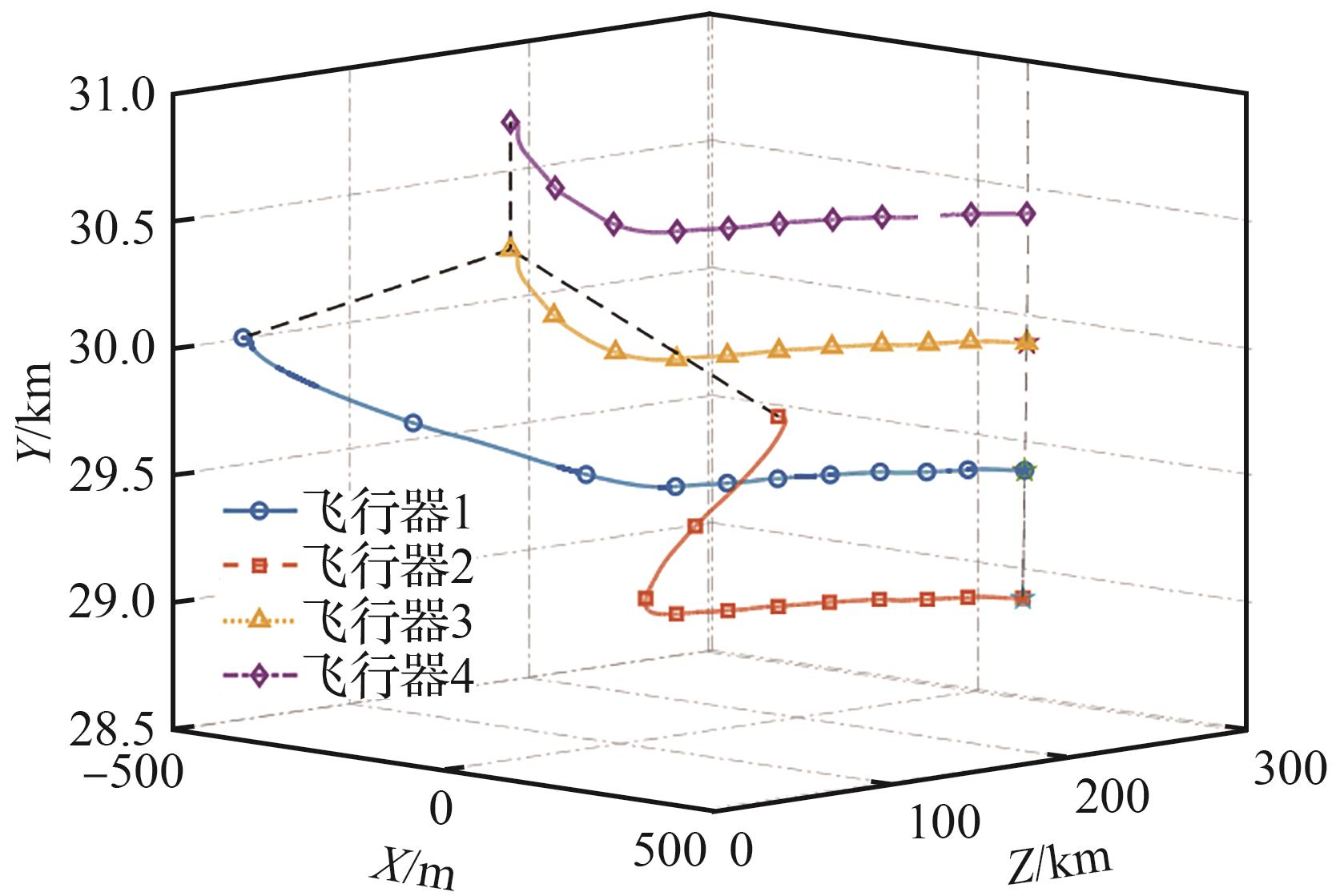
Fig.4
X axis position performance
Fig.5
Y axis position performance
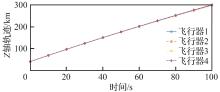
Fig.6
Z axis position performance
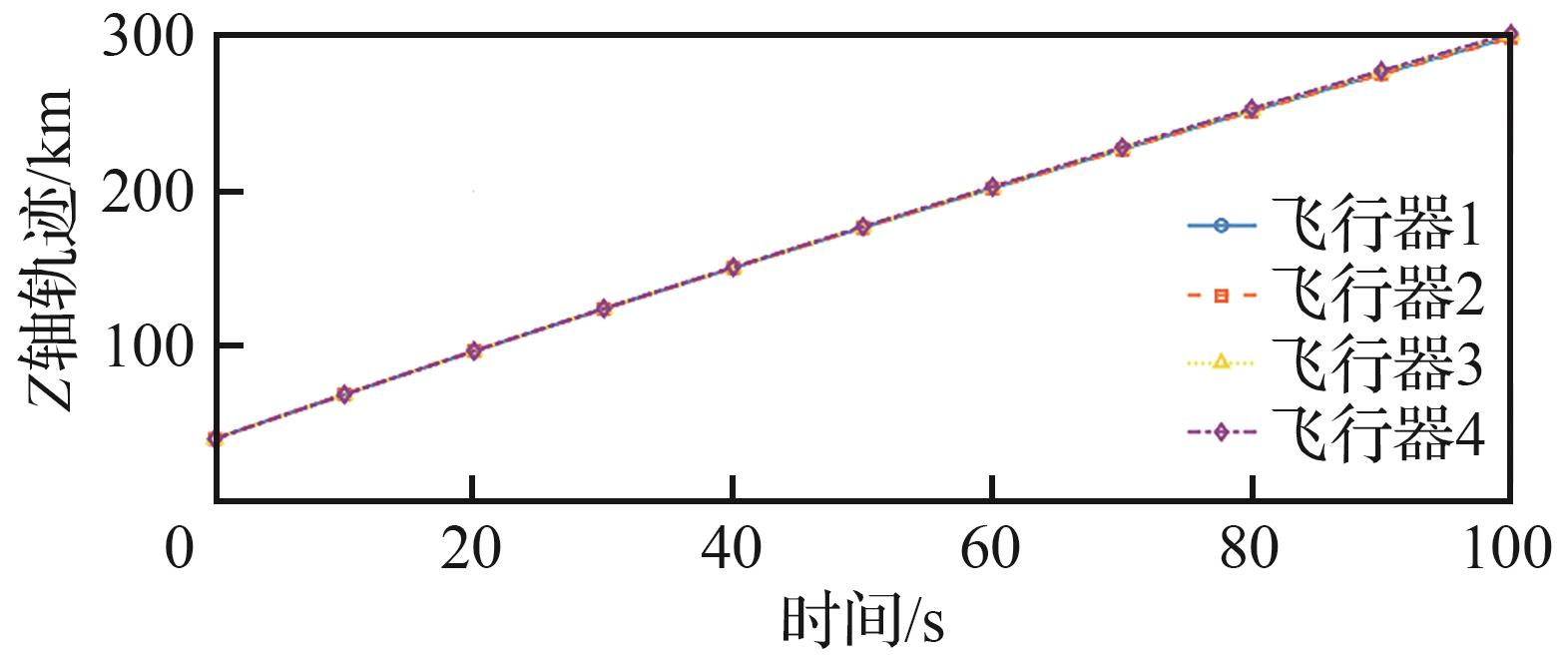
Fig.7
Horizontal formation error
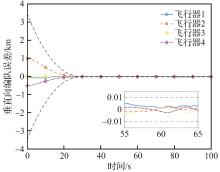
Fig.8
Vertical formation error
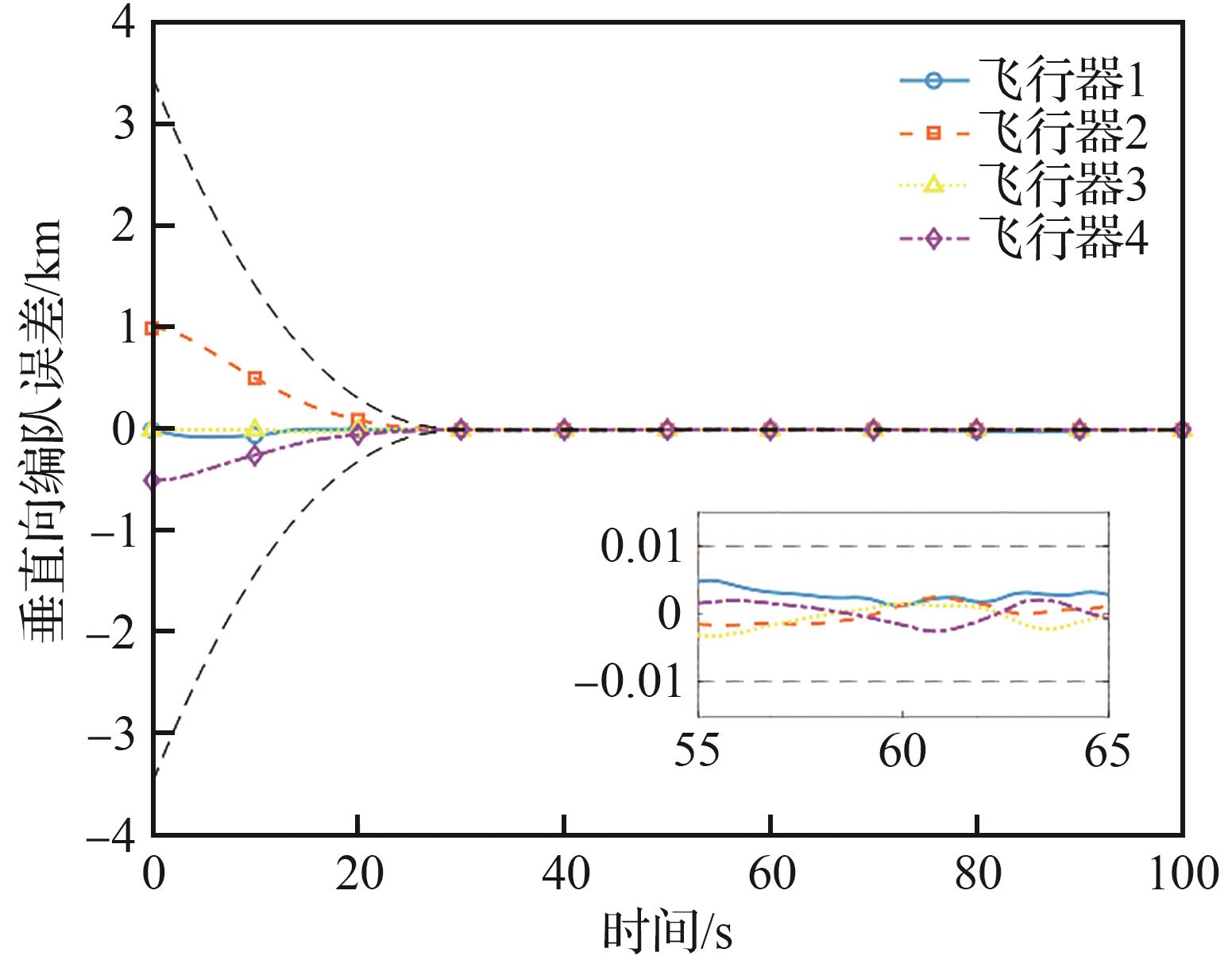
Fig.9
Velocity performance
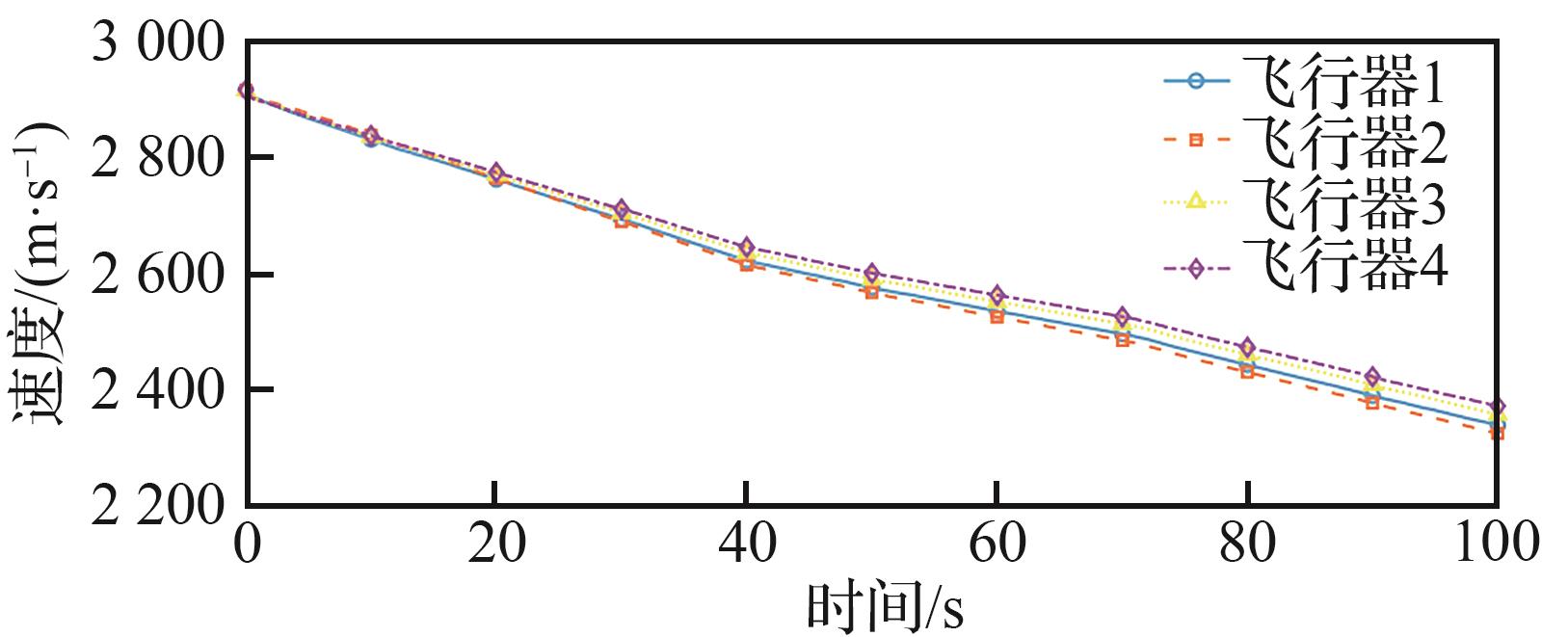

Fig.10
Angle of attack
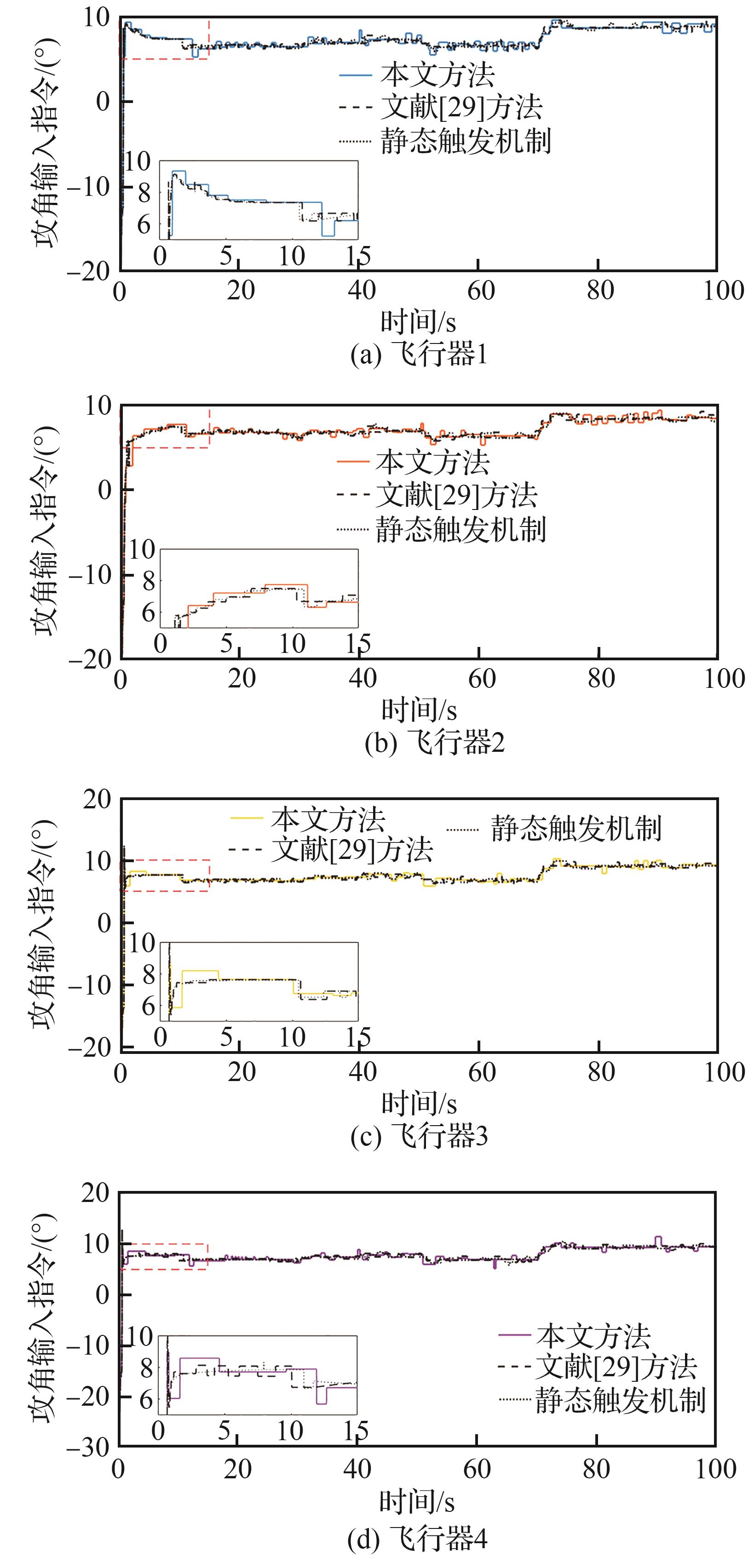
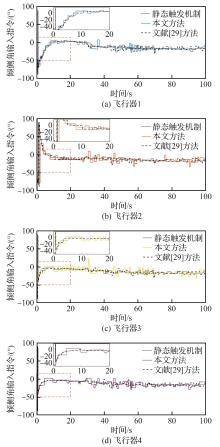
Fig.11
Bank angle
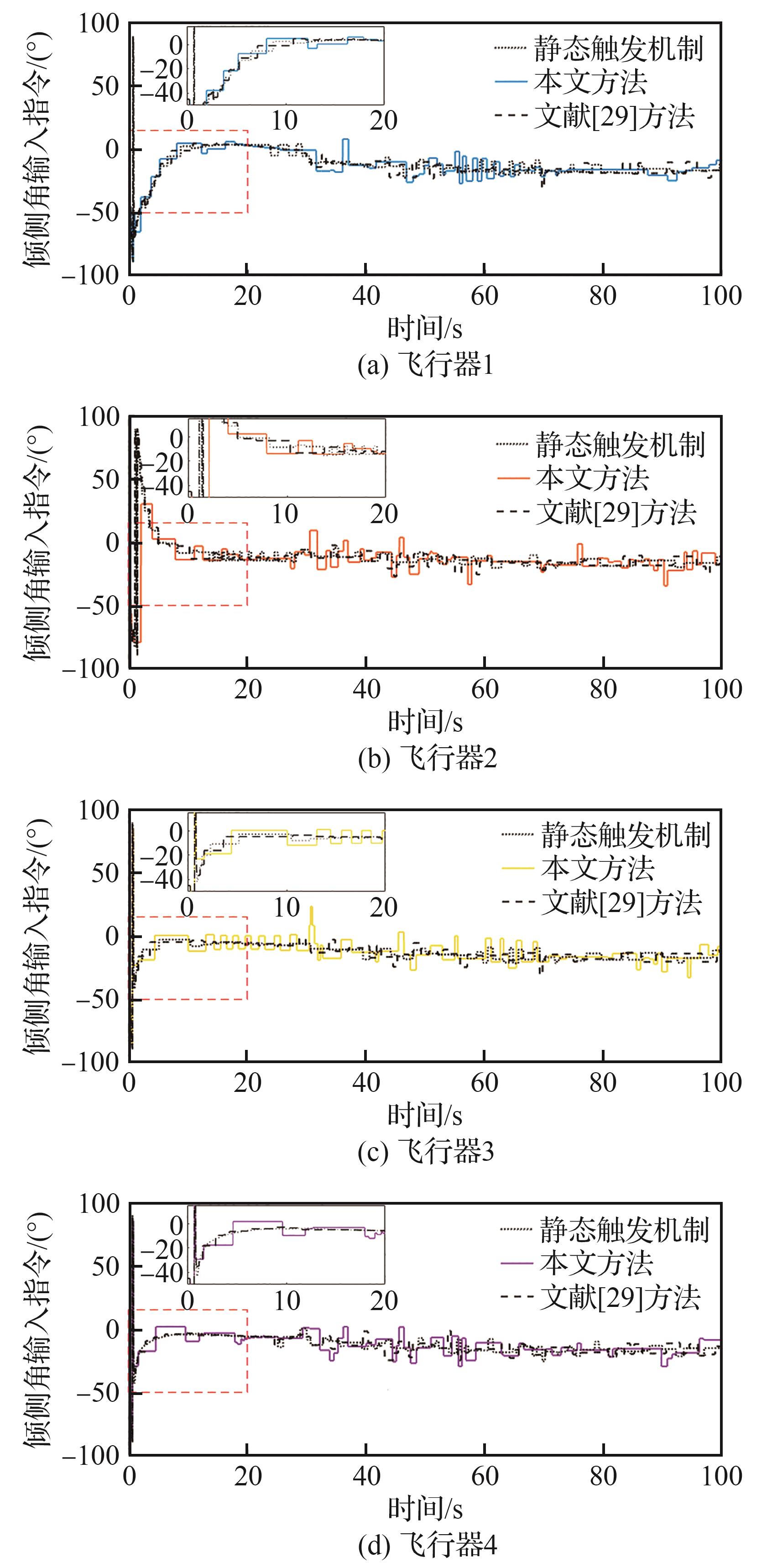
Fig.12
Tracking error of heading angle
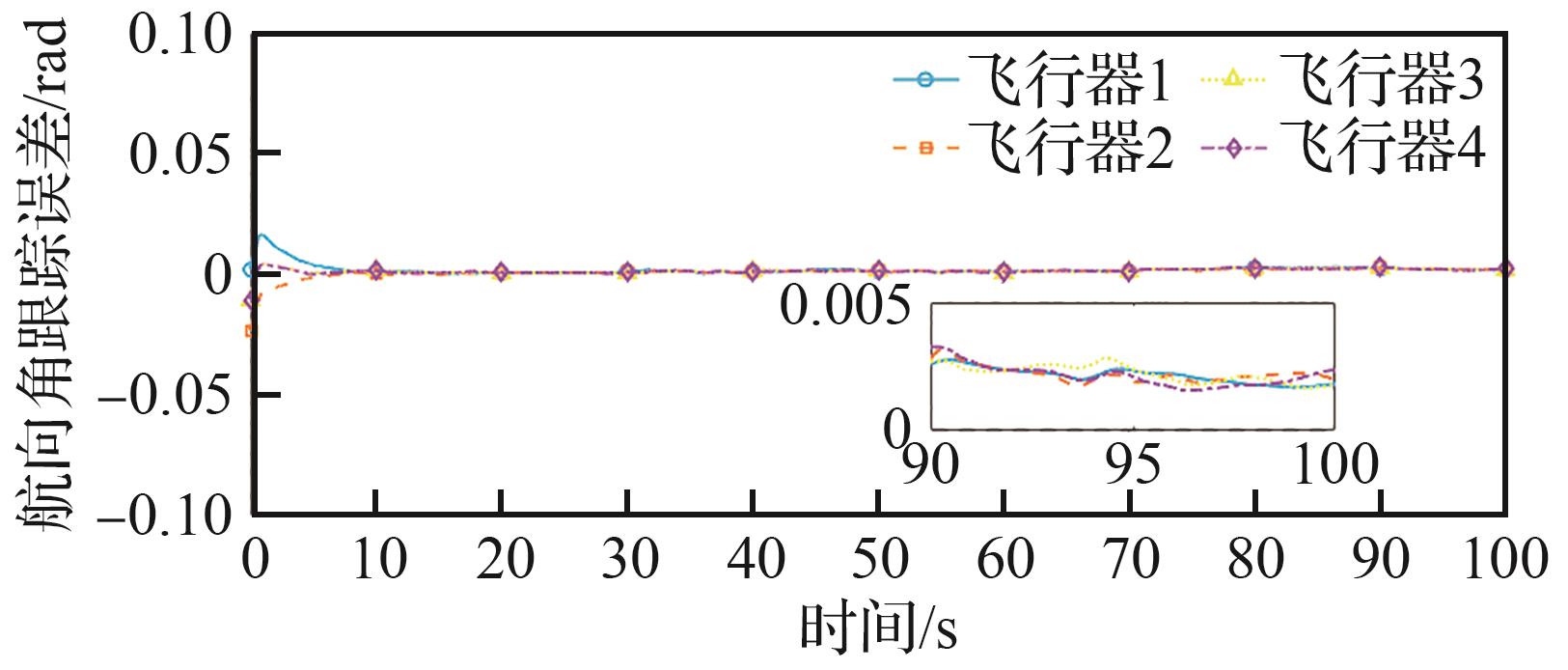
Fig.13
Tracking error of flight path angle
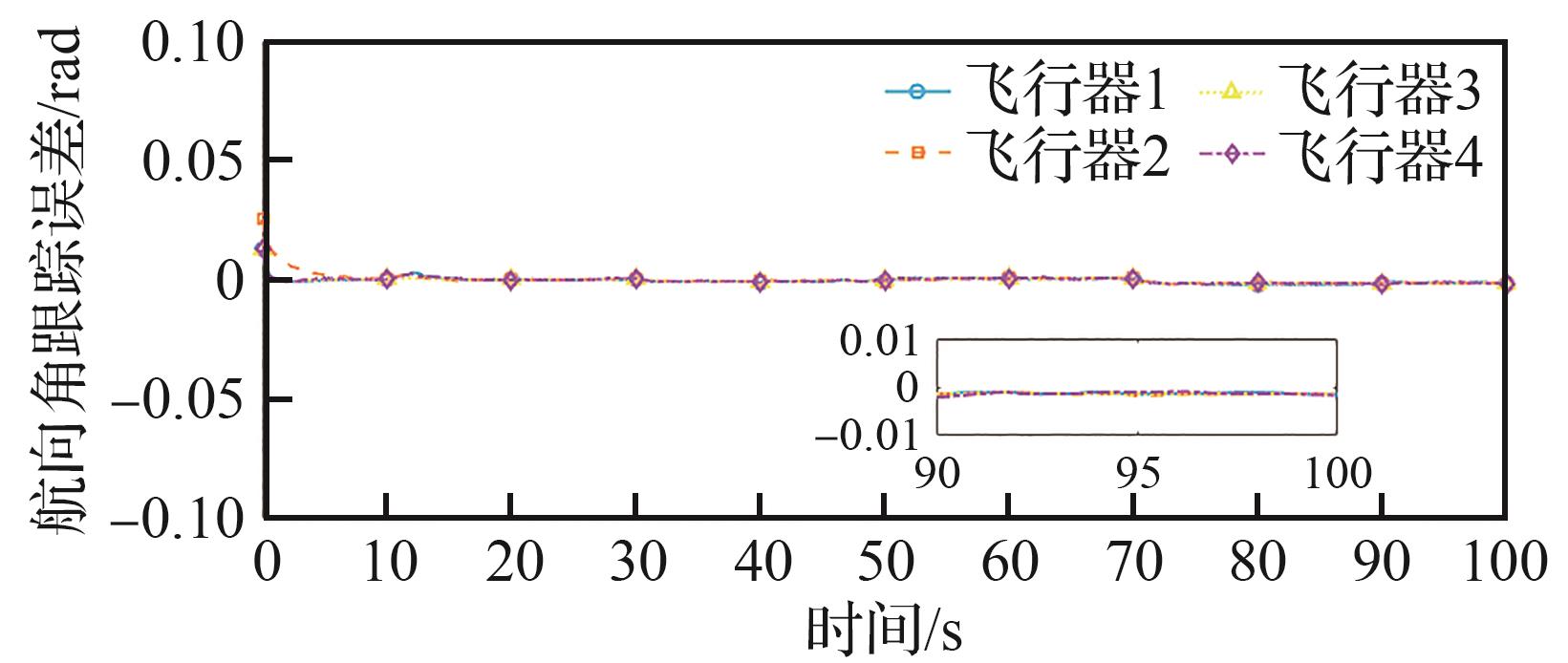
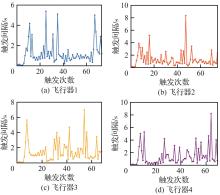
Fig.14
Dynamic event-triggered trigger interval
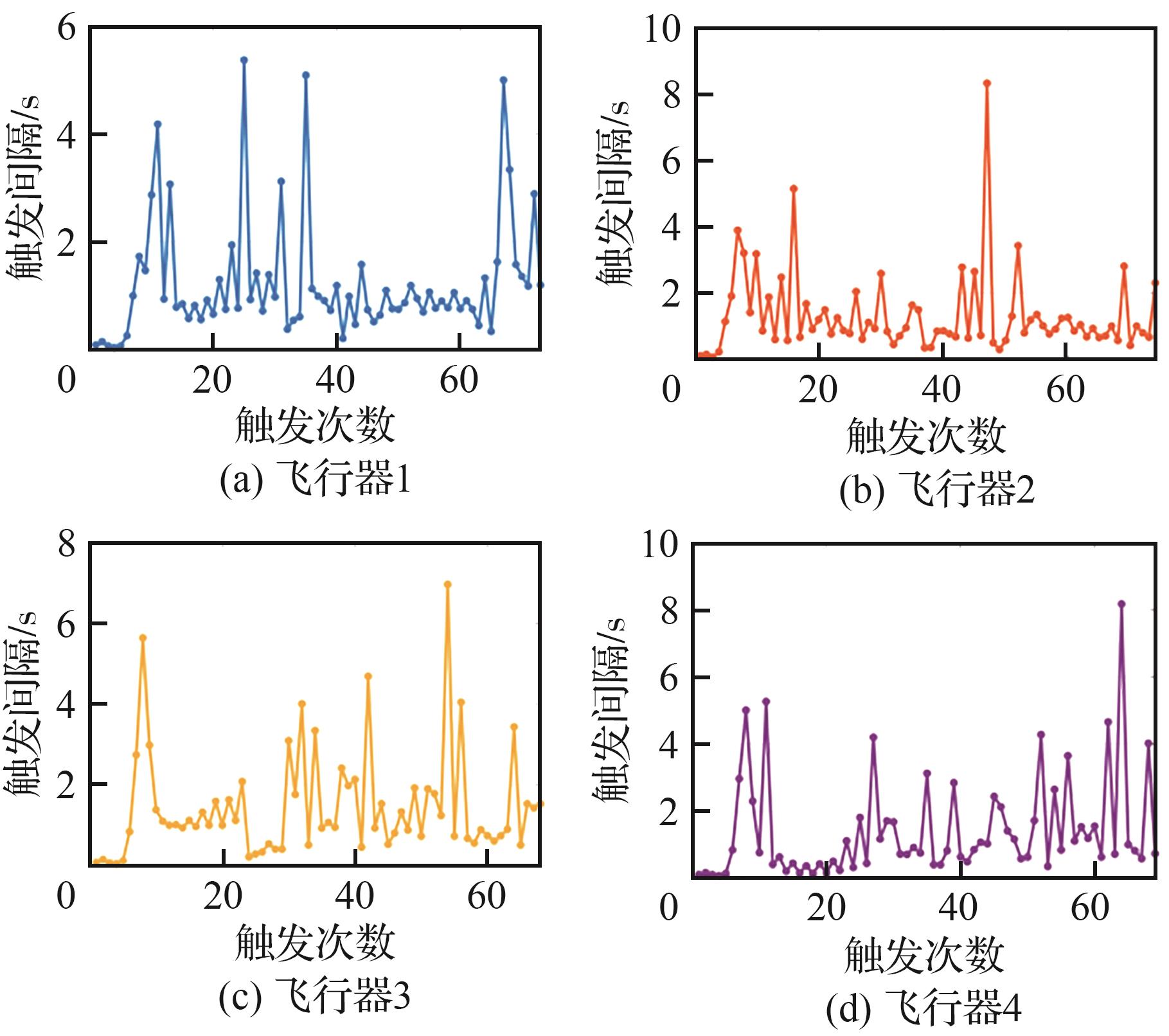
Table 5
Comparison between dynamic and static event-triggered mechanisms
| 评价指标 | 式(28)中动态事件触发机制 | 动态事件触发机制[ | 静态触发机制 | 周期检测 |
|---|---|---|---|---|
| 平均触发次数 | 72 | 350 | 720 | 15 000 |
| 平均触发间隔 | 1.28 | 1.19 | 1.08 | 0.01 |
| 平均资源节约率 | 99.28 | 96.50 | 92.80 | 0.00 |
Fig.15
Comparison of error convergence under different control methods
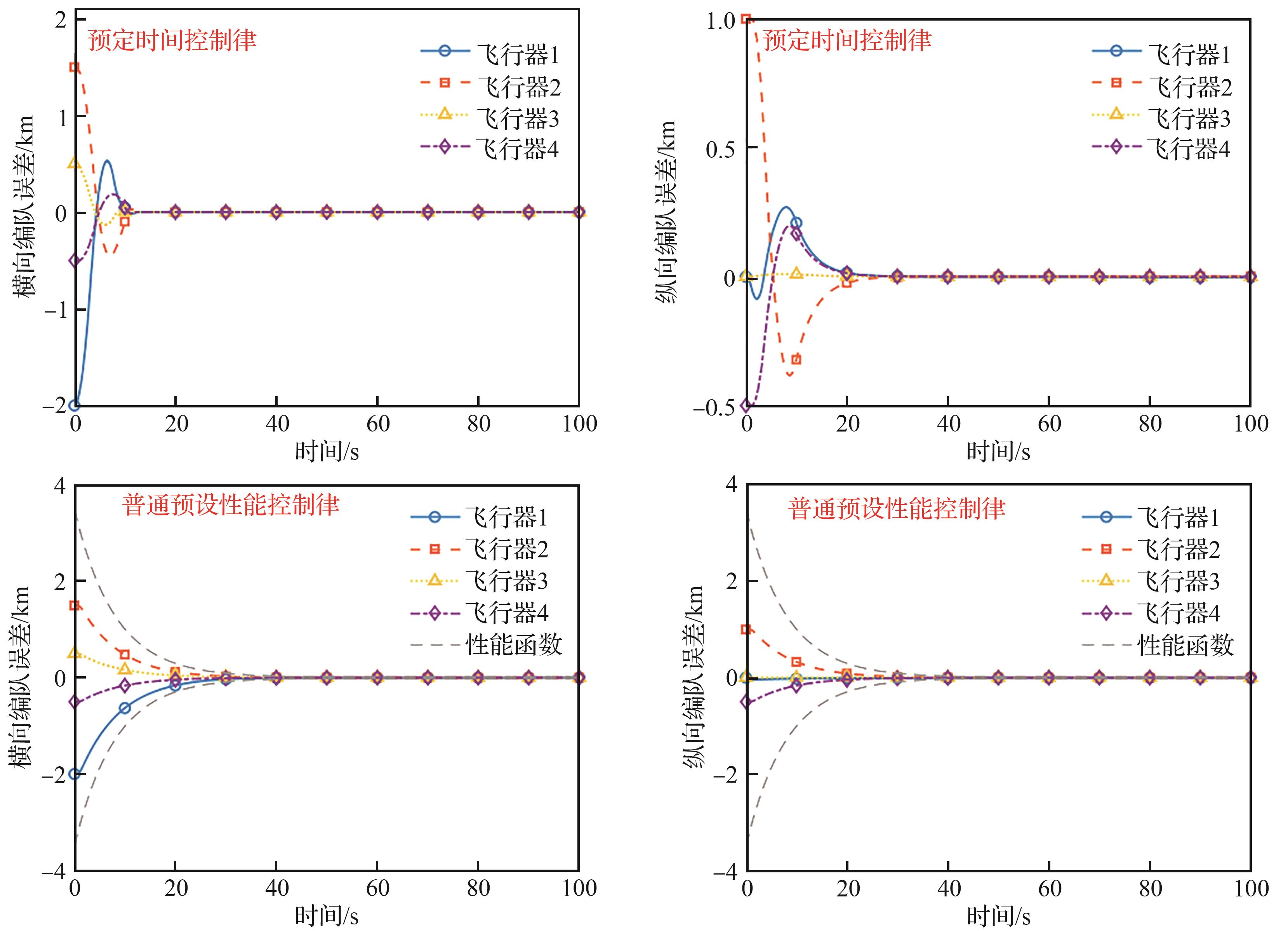

Fig.16
Comparison of control inputs with and without anti-saturation auxiliary devices

Table 6
Initial values in different states
| 情形 | 飞行器1位置 | 飞行器2位置 | 飞行器3位置 | 飞行器4位置 |
|---|---|---|---|---|
| 情形1 | (-600, 30 000, 40 000) | (500,30 500,40 000) | (0,31 000,40 000) | (200,31 500,40 000) |
| 情形2 | (-200,29 800,40 000) | (800,30 400,40 000) | (-900,31 000,40 000) | (400,31 500,40 000) |
| 情形3 | (500,30 100,40 000) | (-500,30 700,40 000) | (200,31 300,40 000) | (-700,30 900,40 000) |
Fig. 17
Error variation curves under different convergence time parameters
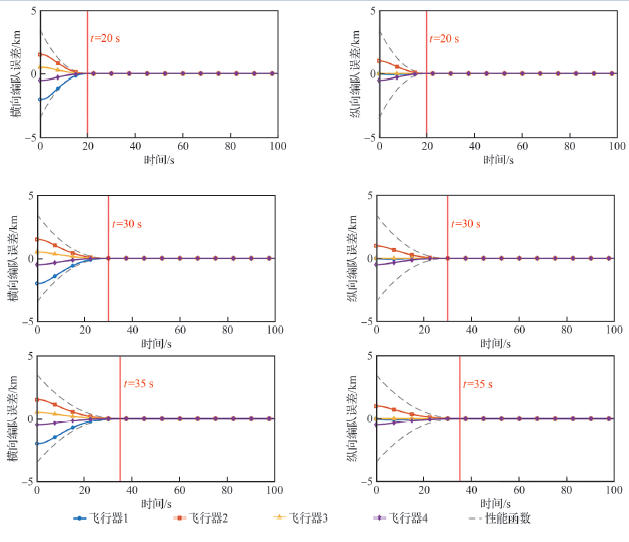
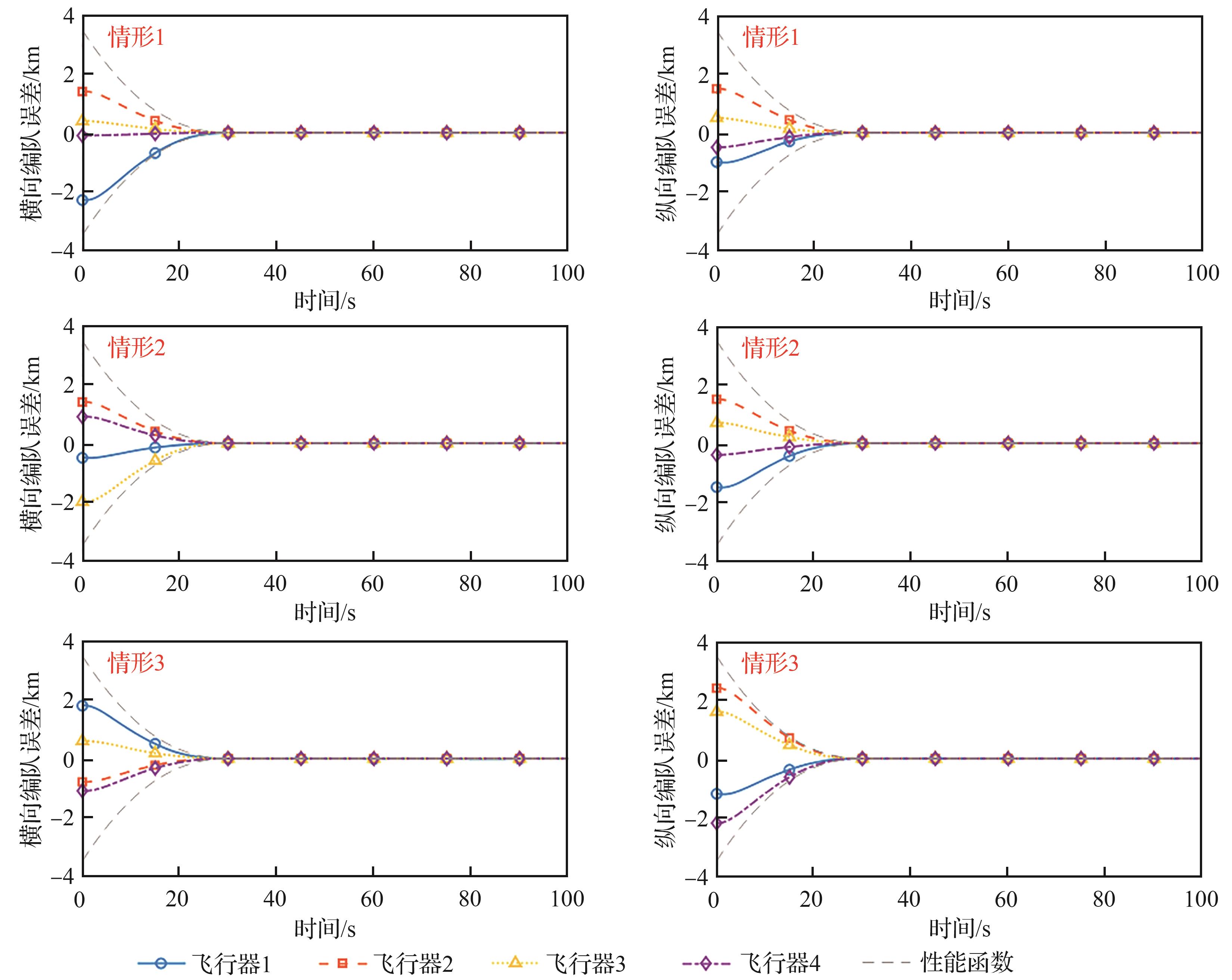
Fig.18
Error variation curves under different initial states
| [1] | 朱继宏, 韩嘉诚, 谷小军, 等. 跨域飞行器结构与变构型设计技术进展与挑战[J]. 航空学报, 2025, 46(18):431686. |
| ZHU J H, HAN J C, GU X J,et al. Advances and challenges in cross-domain vehicle structures and morphing configuration design technologies[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 431686 (in Chinese). | |
| [2] | MAGALHÃES J M JR, HALILA G L O, KIM Y, et al. Intelligent data-driven aerodynamic analysis and optimization of morphing configurations[J]. Aerospace Science and Technology, 2022, 121: 107388. |
| [3] | BAO C Y, WANG P, HE R Z, et al. Observer-based optimal control method combination with event-triggered strategy for hypersonic morphing vehicle[J]. Aerospace Science and Technology, 2023, 136: 108219. |
| [4] | CHEN H L, WANG P, TANG G J. Fuzzy disturbance observer-based fixed-time sliding mode control for hypersonic morphing vehicles with uncertainties[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 3521-3530. |
| [5] | 张豪, 王鹏, 汤国建, 等. 高超声速变外形飞行器事件触发有限时间控制[J]. 航空学报, 2023, 44(15): 528494. |
| ZHANG H, WANG P, TANG G J, et al. Event-triggered fast finite-time control for hypersonic morphing vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528494 (in Chinese). | |
| [6] | YIN T T, GU Z, XIE X P. Observer-based event-triggered sliding mode control for secure formation tracking of multi-UAV systems[J]. IEEE Transactions on Network Science and Engineering, 2023, 10(2): 887-898. |
| [7] | ZE K R, WANG W, LIU K X, et al. Time-varying formation planning and distributed control for multiple UAVs in clutter environment[J]. IEEE Transactions on Industrial Electronics, 2024, 71(9): 11305-11315. |
| [8] | JIA T H, YAN H C, ZHANG H, et al. Adaptive anti-disturbance performance guaranteed formation tracking control for quadrotor UAVs via aperiodic signal updating[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(9): 5212-5223. |
| [9] | LV M L, DE SCHUTTER B, BALDI S. Nonrecursive control for formation-containment of HFV swarms with dynamic event-triggered communication[J]. IEEE Transactions on Industrial Informatics, 2023, 19(3): 3188-3197. |
| [10] | ZHANG Y, WANG X, TANG S J. A globally fixed-time solution of distributed formation control for multiple hypersonic gliding vehicles[J]. Aerospace Science and Technology, 2020, 98: 105643. |
| [11] | 郑巧巧, 陈谋 .基于性能函数的高速飞行器编队切换控制方法[J].航空学报, 2026, 47(S1): 732951. |
| ZHENG Q Q, CHEN M. Formation switching control for high speed aircraft based on performance function [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(S1): 732951 (in Chinese). | |
| [12] | VU L, CHATTERJEE D, LIBERZON D. Input-to-state stability of switched systems and switching adaptive control[J]. Automatica, 2007, 43(4): 639-646. |
| [13] | LIU L, LIU Y J, TONG S C. Fuzzy-based multierror constraint control for switched nonlinear systems and its applications[J]. IEEE Transactions on Fuzzy Systems, 2019, 27(8): 1519-1531. |
| [14] | ZHAO S Y, LI X B, BU X W, et al. Prescribed performance tracking control for hypersonic flight vehicles with model uncertainties[J]. International Journal of Aerospace Engineering, 2019, 2019(1): 3505614. |
| [15] | 周雨欣, 王鹏, 汤国建, 等. 基于干扰观测器的变形飞行器预设性能控制[J]. 战术导弹技术, 2024(4): 72-82. |
| ZHOU Y X, WANG P, TANG G J, et al. Disturbance observer-based prescribed performance control for morphing aircraft[J]. Tactical Missile Technology, 2024(4): 72-82 (in Chinese). | |
| [16] | PU J L, ZHANG Y H, GUAN Y Z, et al. Recurrent neural network-based predefined time control for morphing aircraft with asymmetric time-varying constraints[J]. Applied Mathematical Modelling, 2024, 135: 578-600. |
| [17] | LU X Y, WANG J Y, WANG Y H, et al. Neural network observer-based predefined-time attitude control for morphing hypersonic vehicles[J]. Aerospace Science and Technology, 2024, 152: 109333. |
| [18] | YU X, LI P, ZHANG Y M. Fixed-time actuator fault accommodation applied to hypersonic gliding vehicles[J]. IEEE Transactions on Automation Science and Engineering, 2021, 18(3): 1429-1440. |
| [19] | 武天才, 王宏伦, 任斌, 等. 基于学习的高超声速飞行器分层协调容错方法[J]. 航空学报, 2024, 45(22): 330191. |
| WU T C, WANG H L, REN B, et al. Learning-based hierarchical coordination fault-tolerant method for hypersonic vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(22): 330191 (in Chinese). | |
| [20] | 刘田禾, 安昊, 王常虹. 高超声速飞行器的抗饱和切换控制[J]. 宇航学报, 2020, 41(3): 329-336. |
| LIU T H, AN H, WANG C H. Anti-windup switched control of hypersonic vehicle[J]. Journal of Astronautics, 2020, 41(3): 329-336 (in Chinese). | |
| [21] | WANG J, YANG M, WANG D H, et al. Distributed average consensus attitude synchronization of multi rigid spacecrafts with predefined time event-triggered sliding mode control[J]. Aerospace Science and Technology, 2025, 159: 109975. |
| [22] | 杨博, 朱一川, 魏延明, 等. 折叠式变体飞行器轨迹优化及控制分析[J]. 中国空间科学技术, 2020, 40(3): 64-75. |
| YANG B, ZHU Y C, WEI Y M, et al. Trajectory optimization and control analysis of folding wing aircraft[J]. Chinese Space Science and Technology, 2020, 40(3): 64-75 (in Chinese). | |
| [23] | NI J K, LIU L, LIU C X, et al. Fixed-time dynamic surface high-order sliding mode control for chaotic oscillation in power system[J]. Nonlinear Dynamics, 2016, 86(1): 401-420. |
| [24] | WEI C S, LUO J J, YIN Z Y, et al. Leader-following consensus of second-order multi-agent systems with arbitrarily appointed-time prescribed performance[J]. IET Control Theory and Applications, 2018,12(16): 2276-2286. |
| [25] | 韦常柱, 顾鑫, 李玉龙. 高超声速变外形飞行器固定时间抗饱和控制[J]. 宇航学报, 2025, 46(4): 731-740. |
| WEI C Z, GU X, LI Y L. Fixed-time anti-saturation control for hypersonic morphing flight vehicle[J]. Journal of Astronautics, 2025, 46(4): 731-740 (in Chinese). | |
| [26] | ZHANG L X, GAO H J. Asynchronously switched control of switched linear systems with average dwell time[J]. Automatica, 2010, 46(5): 953-958. |
| [27] | CUI Y, ZHANG H G, WANG Y C, et al. A fuzzy adaptive tracking control for MIMO switched uncertain nonlinear systems in strict-feedback form[J]. IEEE Transactions on Fuzzy Systems, 2019, 27(12): 2443-2452. |
| [28] | HAN T T, GE S S, LEE T H. Adaptive neural control for a class of switched nonlinear systems[J]. Systems Control Letters, 2009, 58(2): 109-118. |
| [29] | SHI Y X, HU Q L, LI D Y, et al. Adaptive optimal tracking control for spacecraft formation flying with event-triggered input[J]. IEEE Transactions on Industrial Informatics, 2023, 19(5): 6418-6428. |
| [30] | WU C H, YAN J G, SHEN J H, et al. Predefined-time attitude stabilization of receiver aircraft in aerial refueling[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2021, 68(10): 3321-3325. |
| [1] | Yu LI, Jiaxin CHEN, Kecheng LI, Chi-Yung WEN, Ni LI, Xiaoxiong LIU. Characteristic analysis of aircraft with asymmetric wing damage and incremental fault-tolerant control [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532501-532501. |
| [2] | Qie LIU, Junying LU, Fei XIE, Wenbo LI. Adaptive hybrid dynamic programming for fault-tolerant attitude control of underactuated spacecraft [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532531-532531. |
| [3] | Yuan LU, Ke ZHANG, Bin JIANG. Hierarchical fault-tolerant formation control for unmanned helicopters based on fully-actuated system approach [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532279-532279. |
| [4] | Yuying GUO, Lanxin LIAO, Xiaoqiang ZHANG, Youmin ZHANG, Kai WANG. Finite-time fault-tolerant control of compound actuator faults for unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(4): 332659-332659. |
| [5] | Jianxin SU, Yuxin LIAO, Weiping XU, Junyue TAN, Xing GAO. Adaptive optimal control for hypersonic morphing vehicles considering performance constraints [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(4): 332387-332387. |
| [6] | Junyi DUAN, Kai LIU, Shuaibin AN, Guoqing WANG, Zhe DONG. Dynamic compound control method of carrier-based aircraft based on model predictive control [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(2): 332040-332040. |
| [7] | Guocheng YAN, Honglun WANG, Yanxiang WANG, Yuebin LUN, Junfan ZHU. Prescribed performance anti-swing control for wing rotation process of UAV towed aerial recovery [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 331840-331840. |
| [8] | Honglin LIU, Guan WANG, Shuaibin AN, Shaojie MA, Kai LIU. Online identification based strong adaptive control of hypersonic morphing vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331654-331654. |
| [9] | Shan HUANG, Jingping SHI, Qi ZHU, Yongxi LYU, Xiaobo QU. Prescribed-time incremental backstepping fault-tolerant control for wing-damaged aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331503-331503. |
| [10] | Tao CHEN, Jian CHEN. Learning-observer-based resilient fault-tolerant control for quadrotor unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531346-531346. |
| [11] | Fengying ZHENG, Zhimin SHEN, Yaqin LI, Kaizhao XU, Xinhua WANG. Gain adaptive multi-mode switching control for coaxial high-speed helicopter [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 529088-529088. |
| [12] | Jie LI, Wenxin HUANG, Yiming CAI, Siyuan WANG, Yufei GAO, Xuefeng JIANG. Fault diagnosis and fault tolerant control of position sensor based on DFPMM [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(10): 329307-329307. |
| [13] | Ming LIU, Ruichao FAN, Shi QIU, Xibin CAO. Spacecraft attitude-orbit prescribed performance control based on fully actuated system approach [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628313-628313. |
| [14] | Guangquan DUAN, Guoping LIU. Adaptive prescribed control of position and attitude of combined spacecraft based on fully actuated system approach [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628837-628837. |
| [15] | Ming LU, Xueqin CHEN, Fan WU, Xibin CAO. Attitude maneuver control of spacecraft based on second⁃order fully actuated system under attitude constraints [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628958-628958. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341