Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (7): 332649.doi: 10.7527/S1000-6893.2025.32649
• Electronics and Electrical Engineering and Control • Previous Articles
Shufang XU1,2, Wenxuan FEI1, Heng LI1, Hongmin GAO1( )
)
Received:2025-08-03
Revised:2025-08-25
Accepted:2025-08-29
Online:2025-09-12
Published:2025-09-10
Contact:
Hongmin GAO
Supported by:CLC Number:
Shufang XU, Wenxuan FEI, Heng LI, Hongmin GAO. UAV-UGV collaborative air-ground path planning method based on three-stage optimization[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(7): 332649.
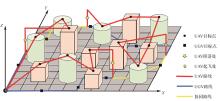
Fig.1
Schematic diagram of UAV and UGV collaborative path-planning simulation
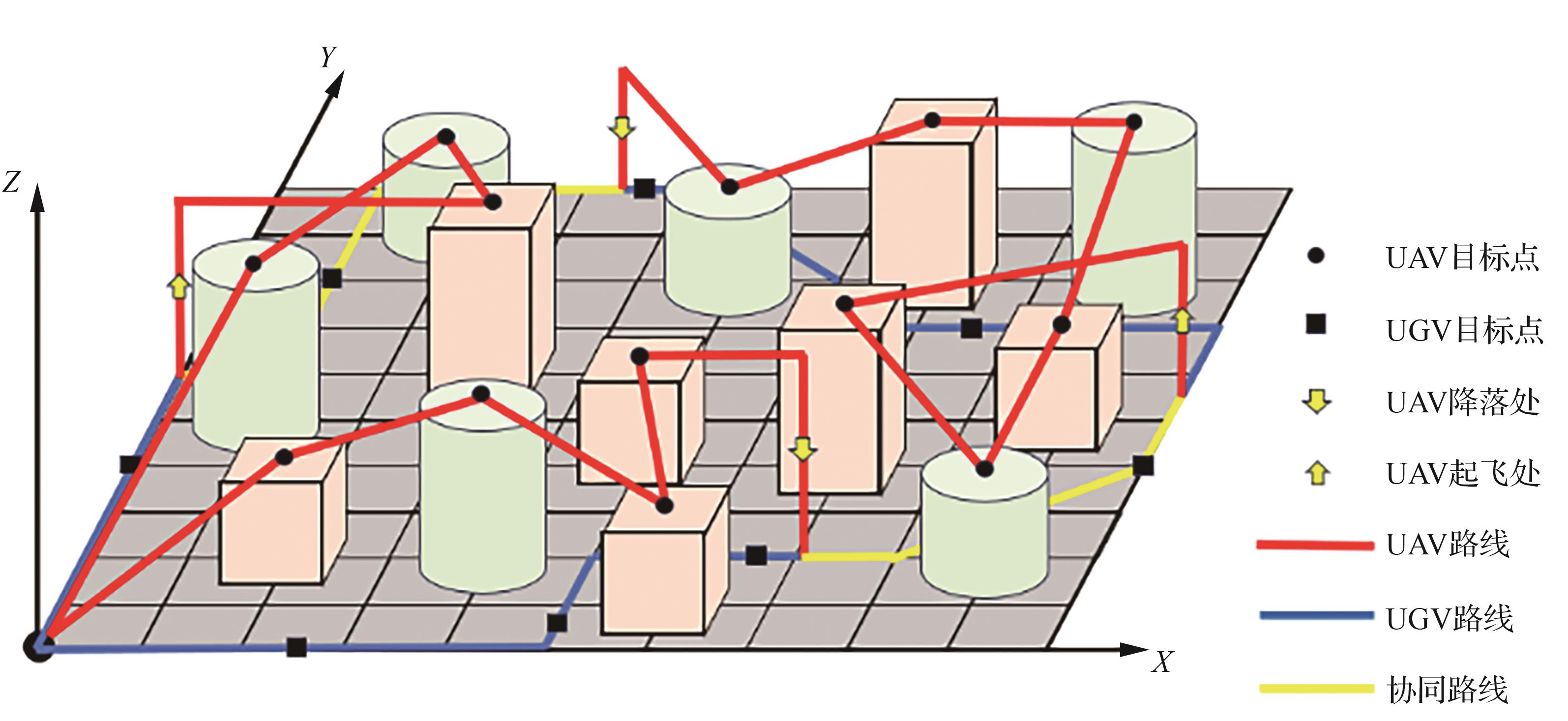
Fig.2
Schematic diagram of UGV motion model[38]
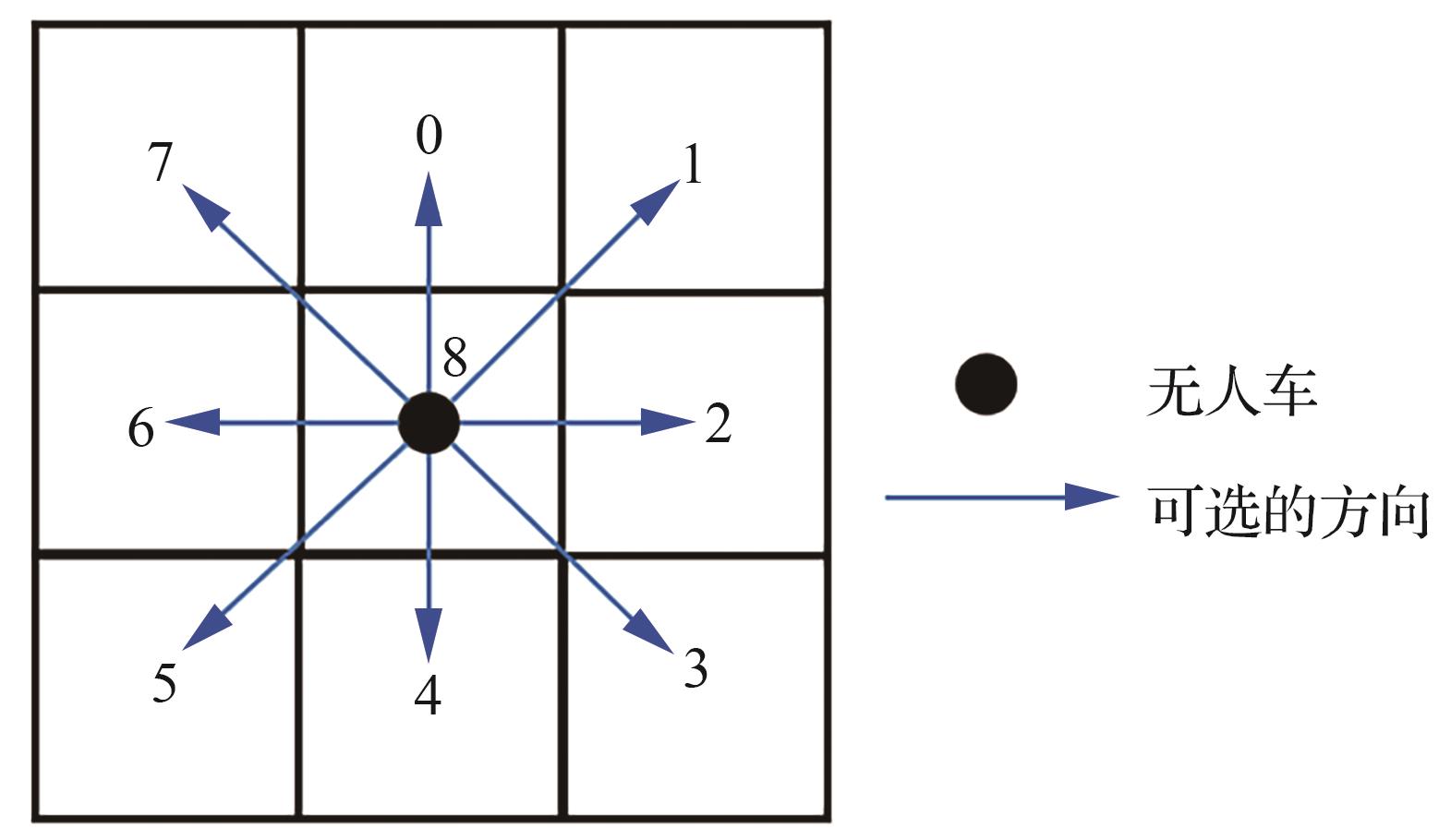
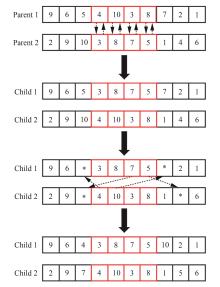
Fig.3
Schematic diagram of crossover operation
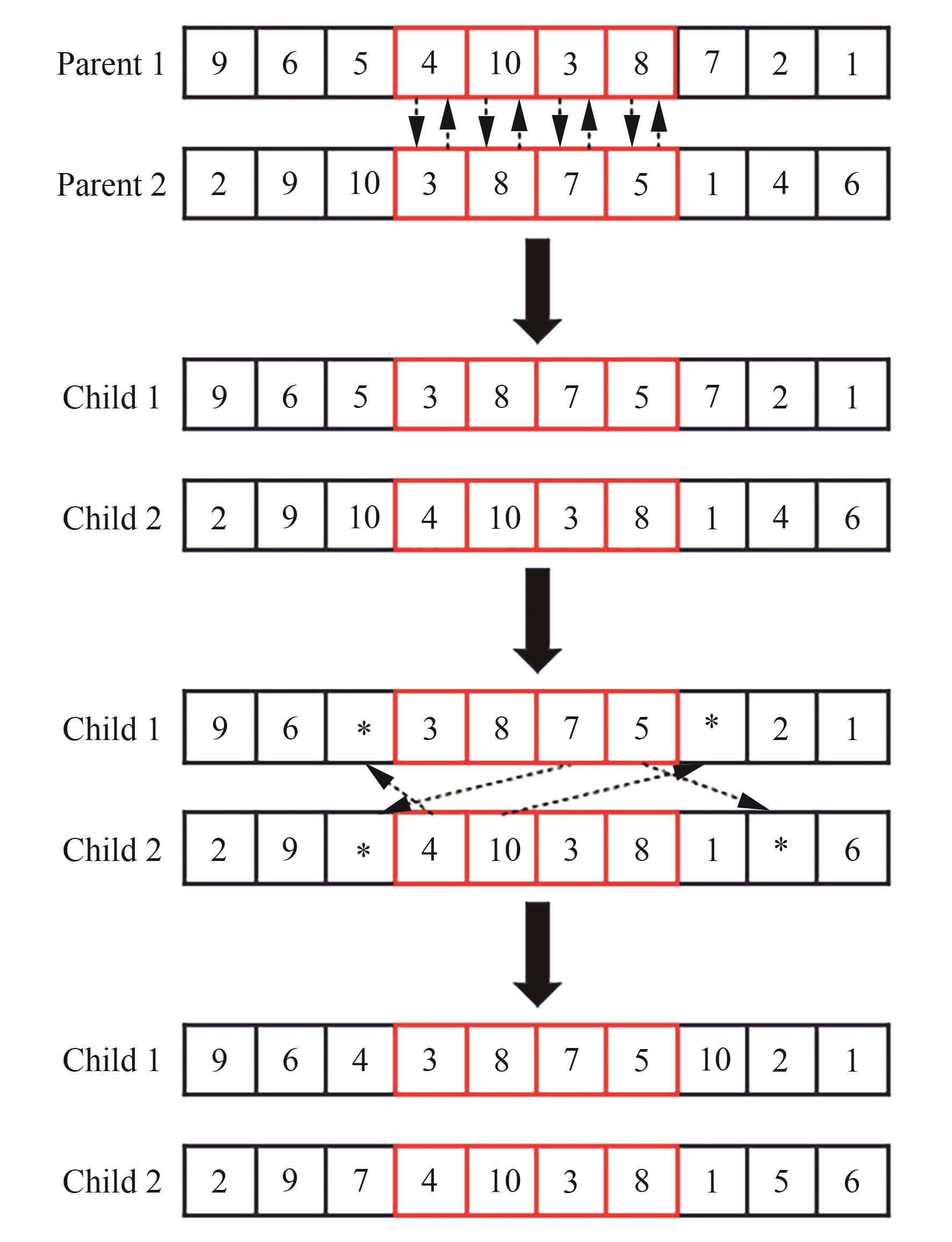
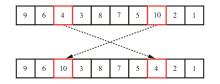
Fig.4
Schematic diagram of mutation operation
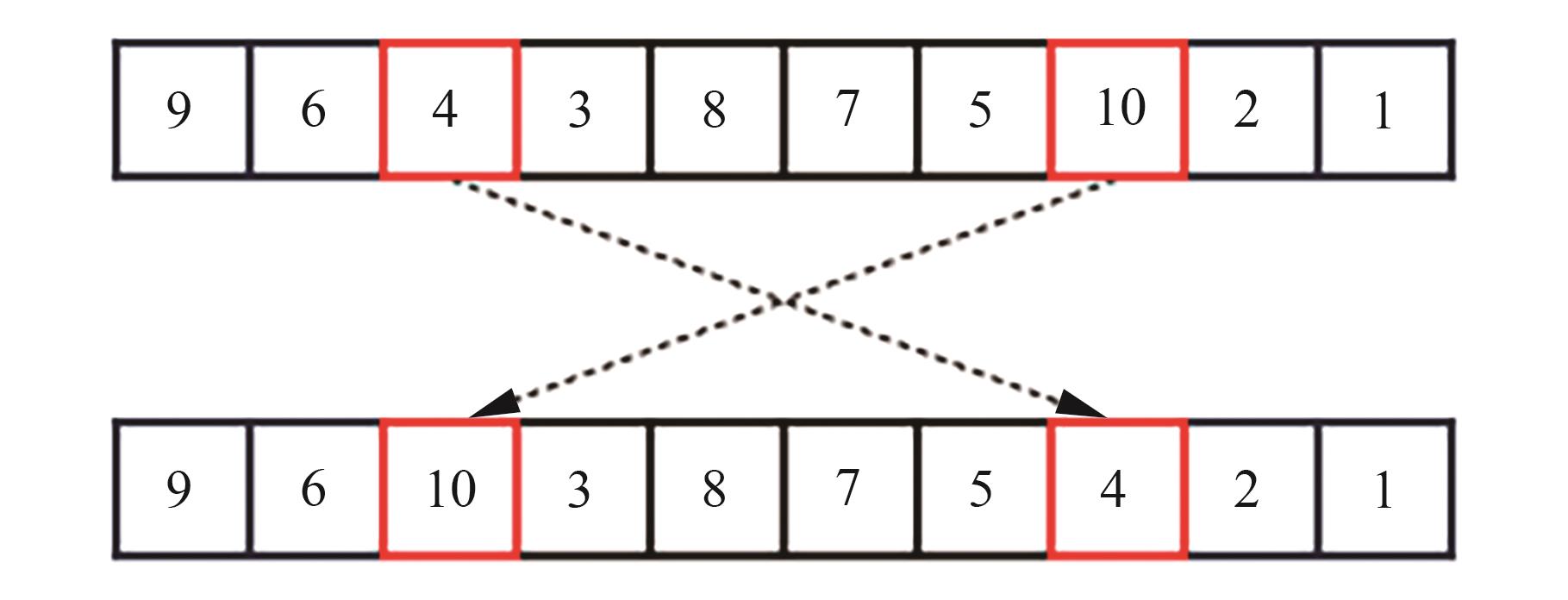
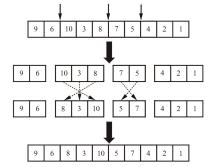
Fig.5
Schematic diagram of 3-opt operation
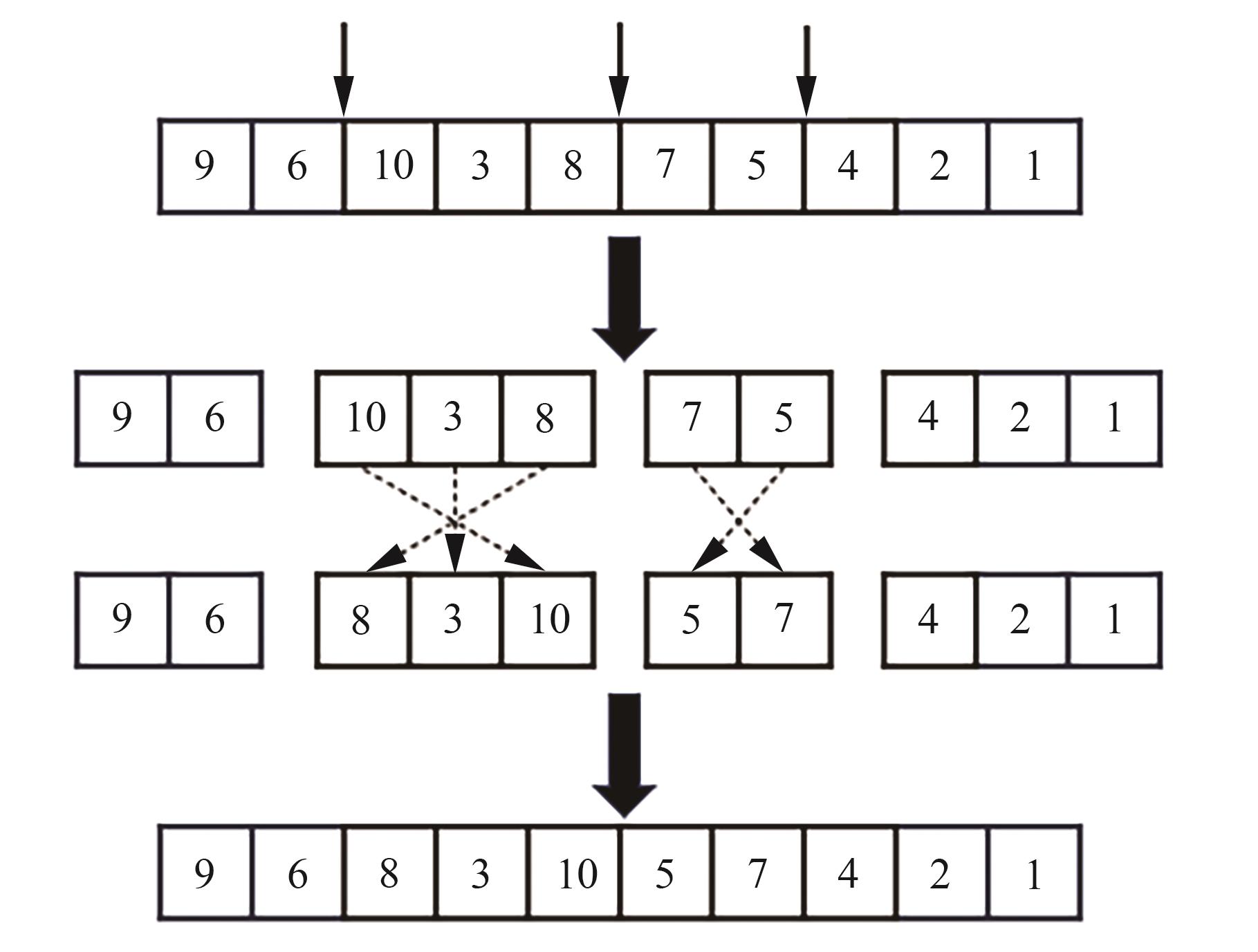
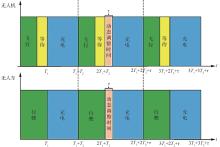
Fig.6
Timeline of path-planning in cooperative systems
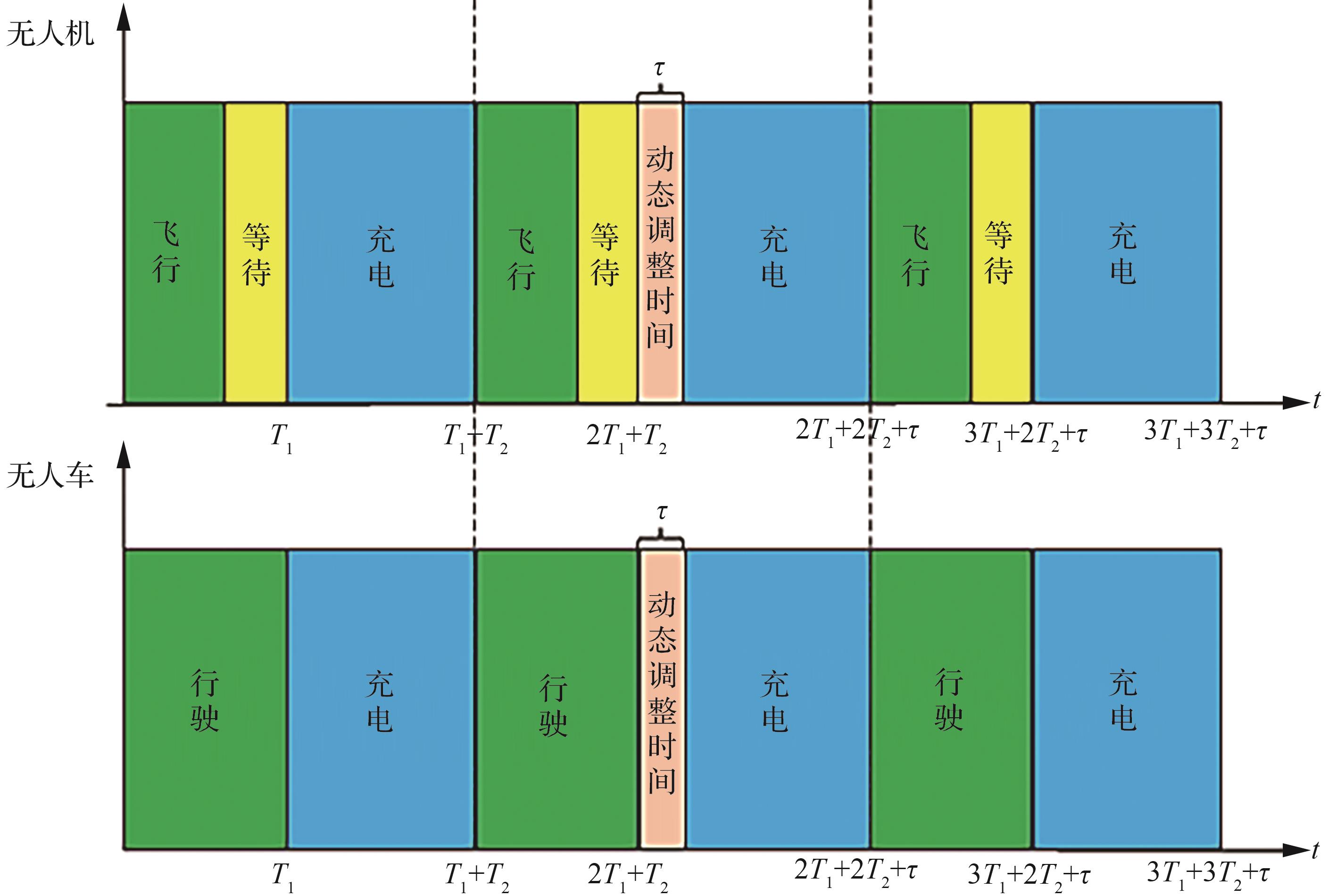
Table 1
Parameter setting of cooperative system
| 系统 | 参数 | 数值 |
|---|---|---|
| 无人机 | /(km·h-1) | 40 |
| /(m·s-1) | 4 | |
| /h | 0.5 | |
| /h | 0.4 | |
| 无人车 | /(km·h-1) | 15(空车) |
| 7.5(载无人机) | ||
| /h | 0.8 |
Table 2
Setting of parameters of various algorithms solving TSP
| 参数 | 意义 | 数值 |
|---|---|---|
| 迭代次数 | 200 | |
| 种群规模 | 100 | |
| 交叉概率 | 0.9 | |
| 变异概率 | 0.05 | |
| 局部搜索个体比重 | 0.3 | |
| 蚁群迭代次数 | 200 | |
| 蚂蚁数量 | 30 | |
| 信息素因子 | 1 | |
| 启发函数因子 | 2 | |
| 信息素挥发因子 | 0.5 | |
| 信息素常量 | 100 | |
| 学习率 | 0.5 | |
| 训练轮次 | 10 000 |
Table 3
Results of average path length of five algorithms in experiments
| 算法 | 平均路径长度/km | ||
|---|---|---|---|
| N T=20 | N T=30 | N T=40 | |
| MLGA | 143.59 | 190.86 | 206.03 |
| 遗传算法 | 153.45 | 202.07 | 290.34 |
| 蚁群算法 | 143.64 | 193.31 | 216.22 |
| 贪婪算法 | 165.94 | 211.86 | 222.16 |
| Q-Learning | 146.96 | 198.67 | 211.52 |

Fig.7
Path-planning results of five algorithms
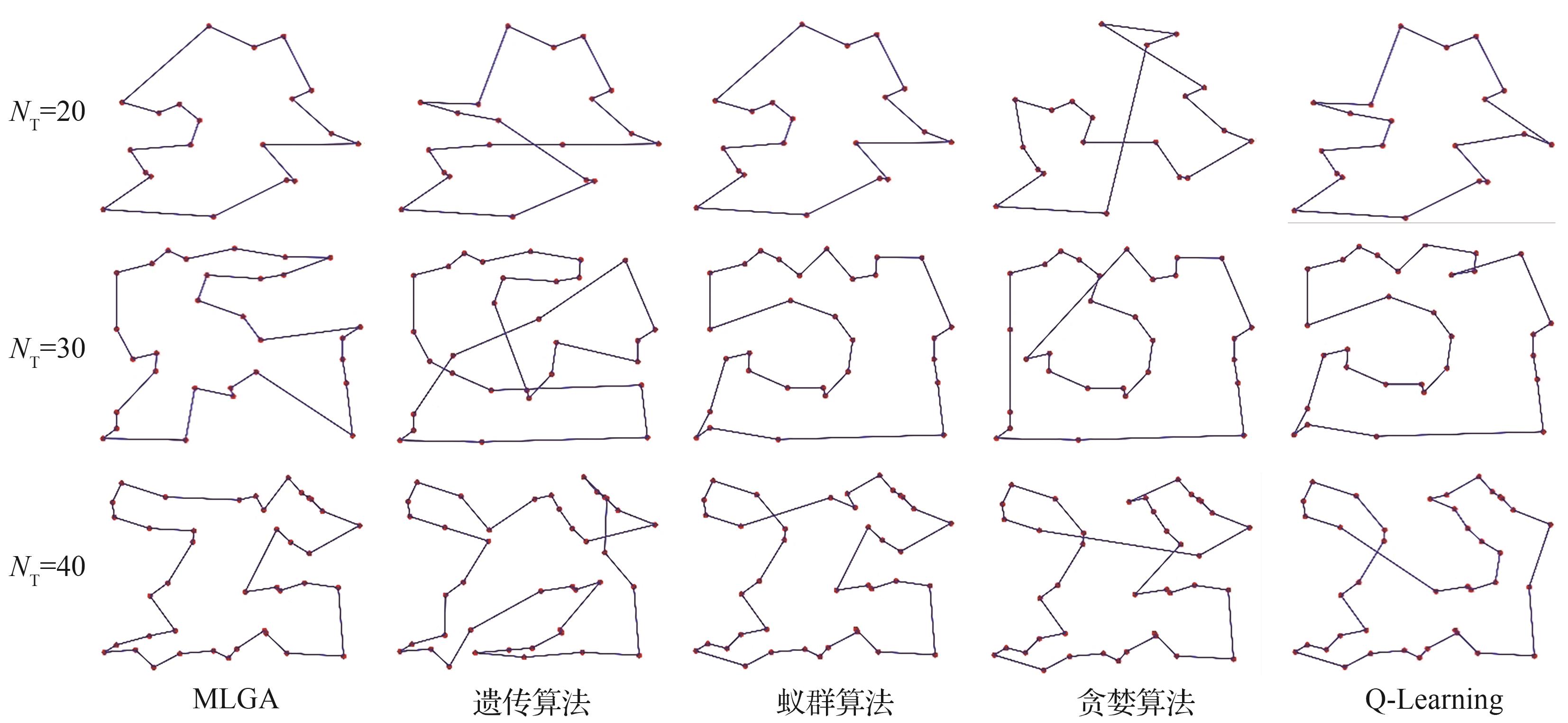
Table 4
Setting of parameters of four PF algorithms
| 参数 | 意义 | 数值 |
|---|---|---|
| /℃ | 初始温度 | |
| 扰动系数 | 0.6 | |
| 衰减系数 | 0.95 | |
| 迭代次数 | 100 | |
| 迭代次数 | 100 |
Table 5
Comparison of mean distance errors under different particle counts in 2D space
| 算法 | 平均距离误差 | |||
|---|---|---|---|---|
| PF | 1.693 1 | 1.192 1 | 0.761 9 | 0.541 8 |
| APF | 1.147 3 | 0.864 1 | 0.662 4 | 0.509 3 |
| SPF | 0.940 1 | 0.721 0 | 0.570 9 | 0.518 9 |
| ASPF | 0.786 7 | 0.613 7 | 0.555 7 | 0.502 4 |

Fig.8
Predicted trajectories and error curves of algorithms under different particle counts in 2D space
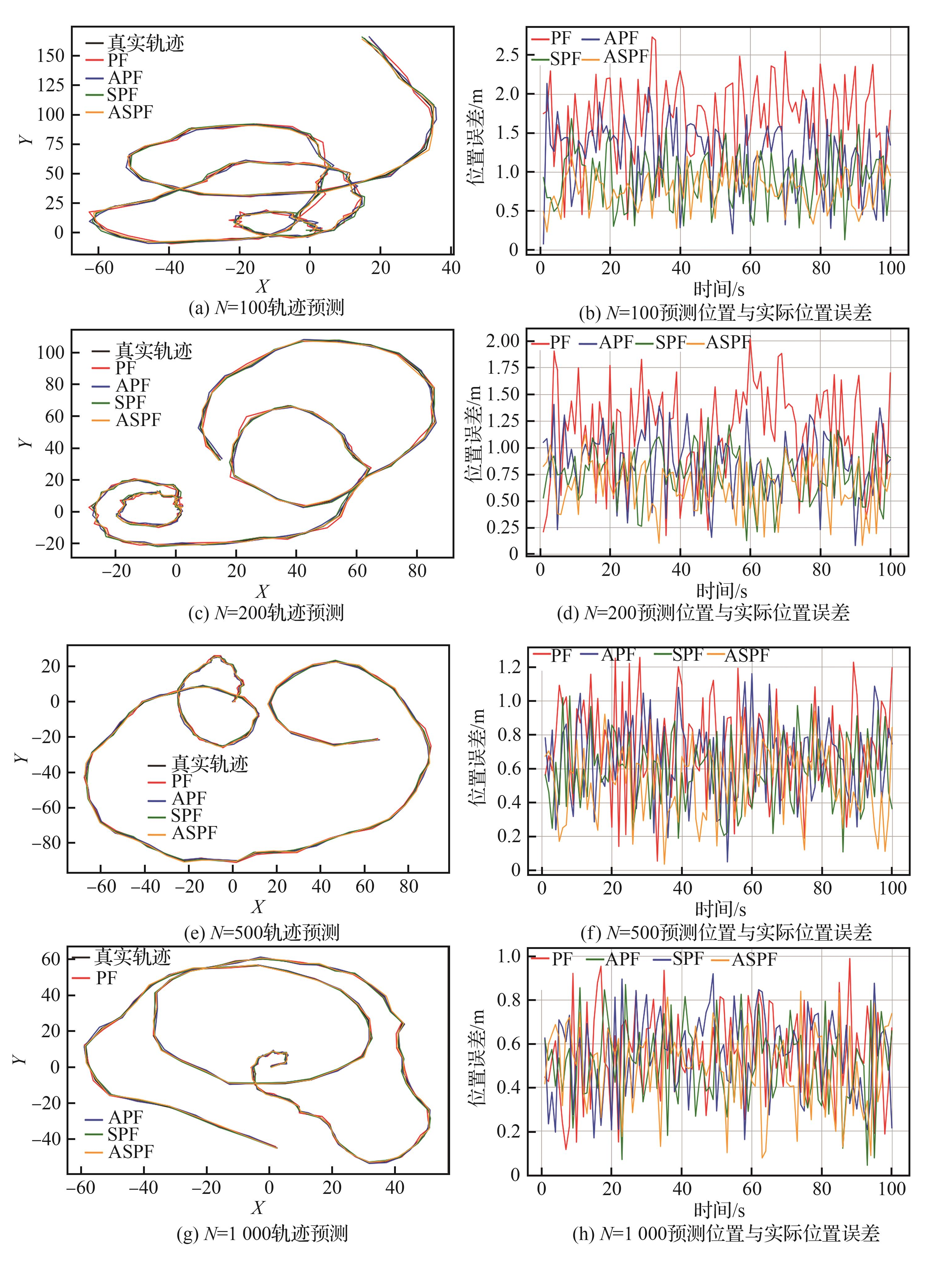
Table 6
Setting of parameters in simulation experiment
| 参数 | 意义 | 数值 |
|---|---|---|
| /m | 安全距离 | 10 |
| /s | 时间步长 | 0.4 |
| /s | 预测时间窗 | 3 |
| /(°) | 角度阈值 |
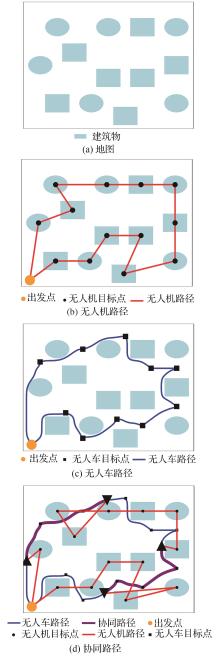
Fig.9
2D experimental path of virtual dataset
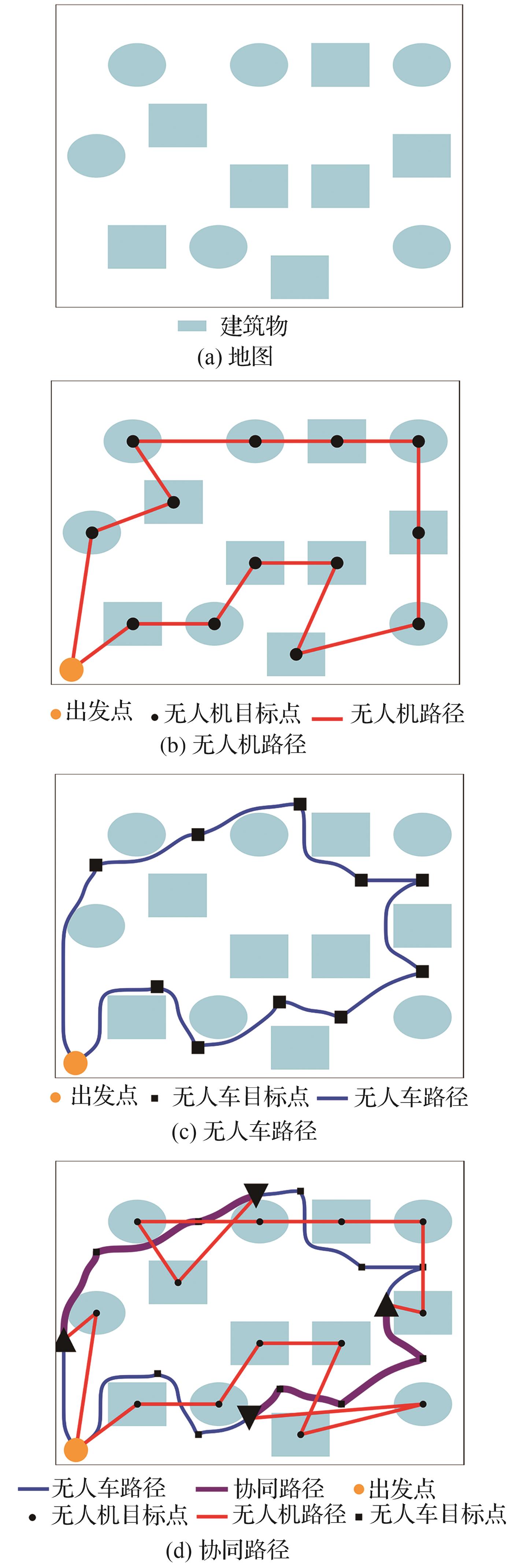
Fig.10
3D experimental path of virtual dataset
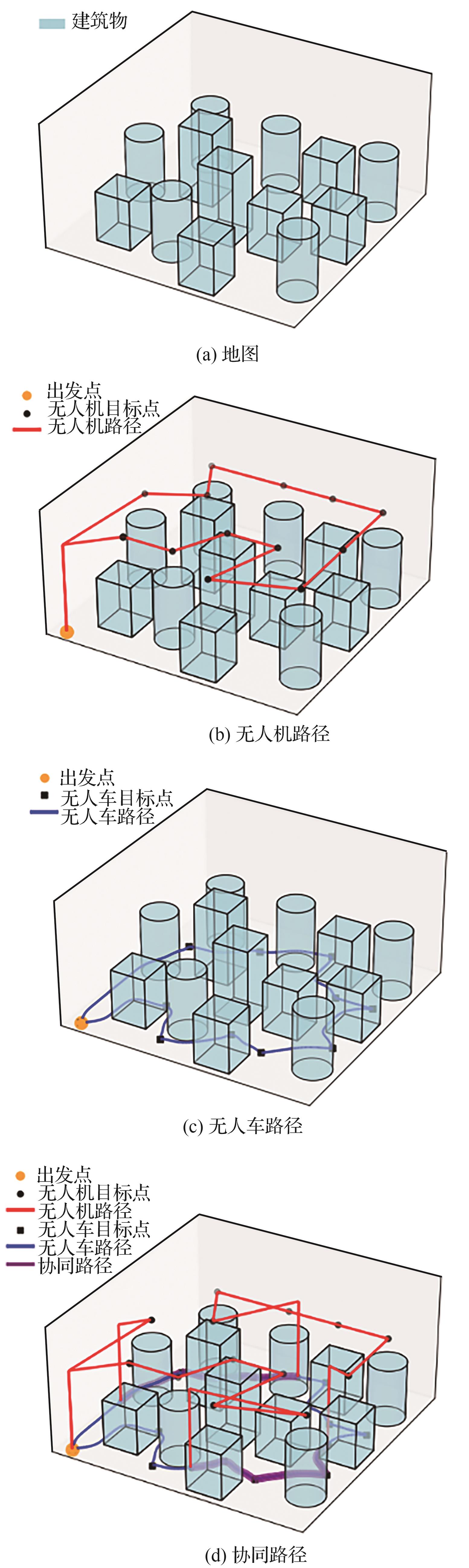

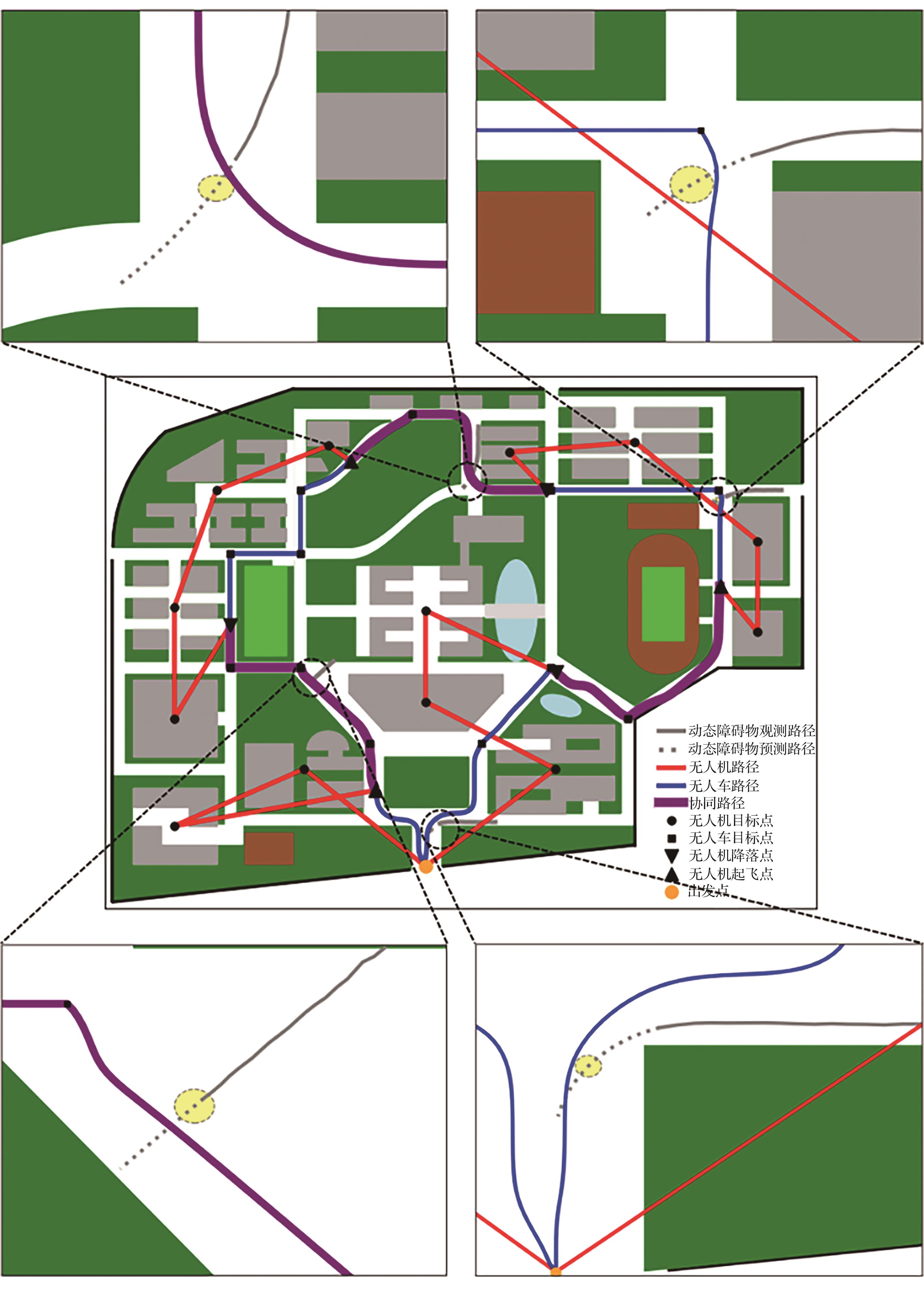
Fig.11
Actual campus plane map

Fig.12
2D experimental path of real dataset
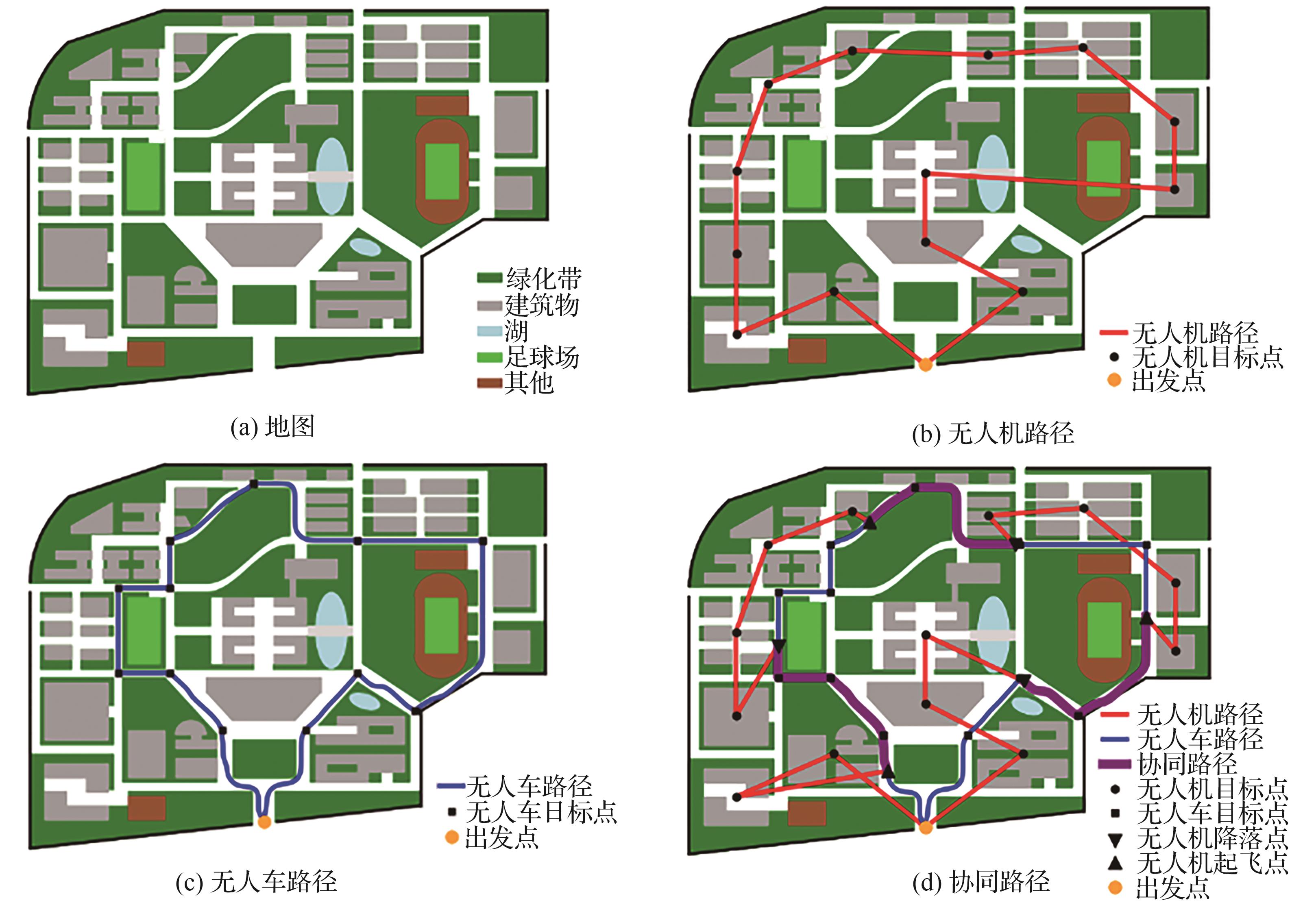
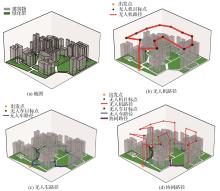
Fig.13
3D experimental path of real dataset
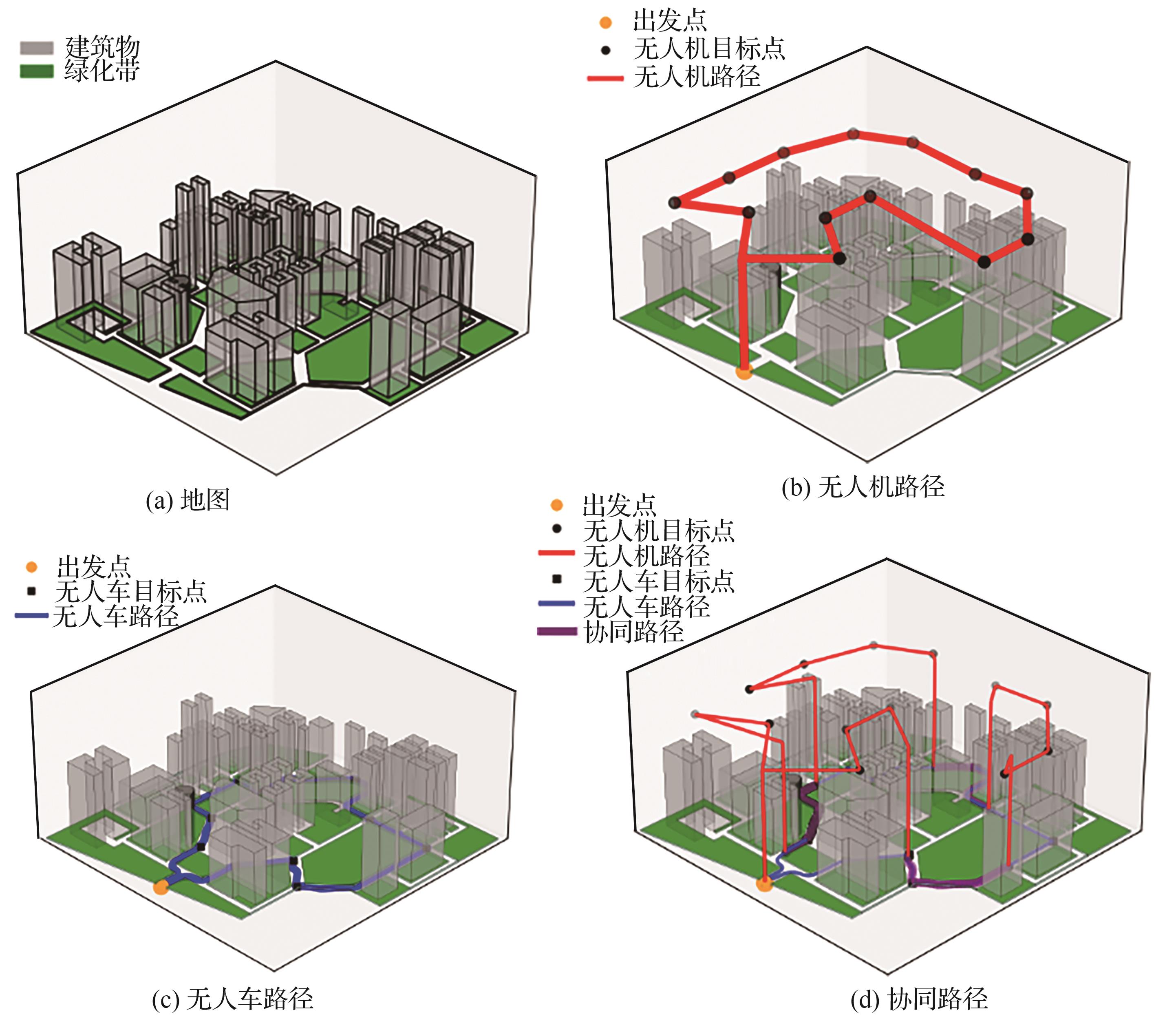
Fig.14
2D experimental path for robustness of real dataset
| [1] |
|
| [2] |
|
| [3] |
刘雷, 刘大卫, 王晓光, 等. 无人机集群与反无人机集群发展现状及展望[J]. 航空学报, 2022(S1): 726908.
|
|
|
|
| [4] |
务益杰. 新型轻量化动力系统在无人机中的设计与应用[J]. 中国军转民, 2025(10): 55-56.
|
|
|
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [1] | Yiquan WU, Kang TONG. Research advances on deep learning-based small object detection in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 30848-030848. |
| [2] | Guocheng YAN, Honglun WANG, Yanxiang WANG, Yuebin LUN, Junfan ZHU. Prescribed performance anti-swing control for wing rotation process of UAV towed aerial recovery [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 331840-331840. |
| [3] | Yicheng SONG, Ruiyun QI, Bin JIANG. Distributed topology reconstruction of UAV formation network under communication fault [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 331914-331914. |
| [4] | Jiang ZHAO, Minghao PI, Bailing TIAN, Pei CHI, Yingxun WANG. Self-organized consensus decision-making method for swarm UAV tracking multiple targets [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331635-331635. |
| [5] | Fang LIU, Chenyang LU, Yan LU, Xin WANG. Adaptive template update-based Transformer algorithm for UAV target tracking [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331687-331687. |
| [6] | Haijun ZHANG, Qingyue XIA, Xu MA, Chao REN, Yang LU. A review of unmanned aerial vehicles deployment optimization in 6G low-altitude communication scenarios [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531296-531296. |
| [7] | Wenxiao HU, Di MU, Zhi LI, Yingyi GUO, Xinmin CHEN. Key technical issues and innovation strategies for development of low-altitude economy [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531539-531539. |
| [8] | Xudong LUO, Yiquan WU, Jinlin CHEN. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 28822-028822. |
| [9] | Gaojie ZHENG, Xiaoming HE, Dongpo LI, Huijun TAN, Kun WANG, Zhenlong WU, Depeng WANG. Double 90° deflection inlet/volute coupling flow characteristics of tail-powered unmanned aerial vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 128782-128782. |
| [10] | Jiang ZHAO, Xuan ZHANG, Pei CHI, Yingxun WANG. Self⁃adaptive formation control and dynamic path planning for air⁃ground heterogeneous swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 329809-329809. |
| [11] | Zhaochen CHU, Tao SONG, Ren JIN, Defu LIN. Vision-based air-to-air multi-UAVs tracking [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 629379-629379. |
| [12] | Kunda LIU, Xueming LIU, Bo ZHU, Qingrui ZHANG. Robust safe control for multi⁃UAV formation flight through narrow corridors [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729768-729768. |
| [13] | Wei LI, Yan GUO, Ning LI, Cuntao LIU, Hao YUAN. Intelligent reflector surface assisted UAV mobile edge computing task data maximization method [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 328486-328486. |
| [14] | LI Hui, LONG Teng, SUN Jingliang, XU Guangtong. Adaptive line-of-sight method for 3D path following of UAVs [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 326105-326105. |
| [15] | ZHANG Zhouyu, CAO Yunfeng, FAN Yanming. Research progress of vision based aerospace conflict sensing technologies for small unmanned aerial vehicle in low altitude [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 25645-025645. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341