Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (16): 431767.doi: 10.7527/S1000-6893.2025.31767
• Material Engineering and Mechanical Manufacturing • Previous Articles
Dake TIAN1,2, Hongqiang LEI1,2, Lu JIN3( ), Liyong ZHANG1, Junchen FAN1, Rongqiang LIU4
), Liyong ZHANG1, Junchen FAN1, Rongqiang LIU4
Received:2025-01-04
Revised:2025-03-10
Accepted:2025-05-14
Online:2025-06-03
Published:2025-05-30
Contact:
Lu JIN
E-mail:jinlu@sjzu.edu.cn
Supported by:CLC Number:
Dake TIAN, Hongqiang LEI, Lu JIN, Liyong ZHANG, Junchen FAN, Rongqiang LIU. Design of a modular deployable biomimetic grasping manipulator[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 431767.
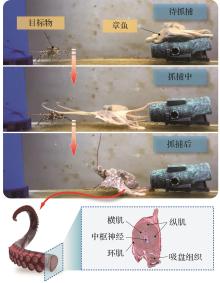
Fig.1
Capture process and muscle tissue distribution of octopus
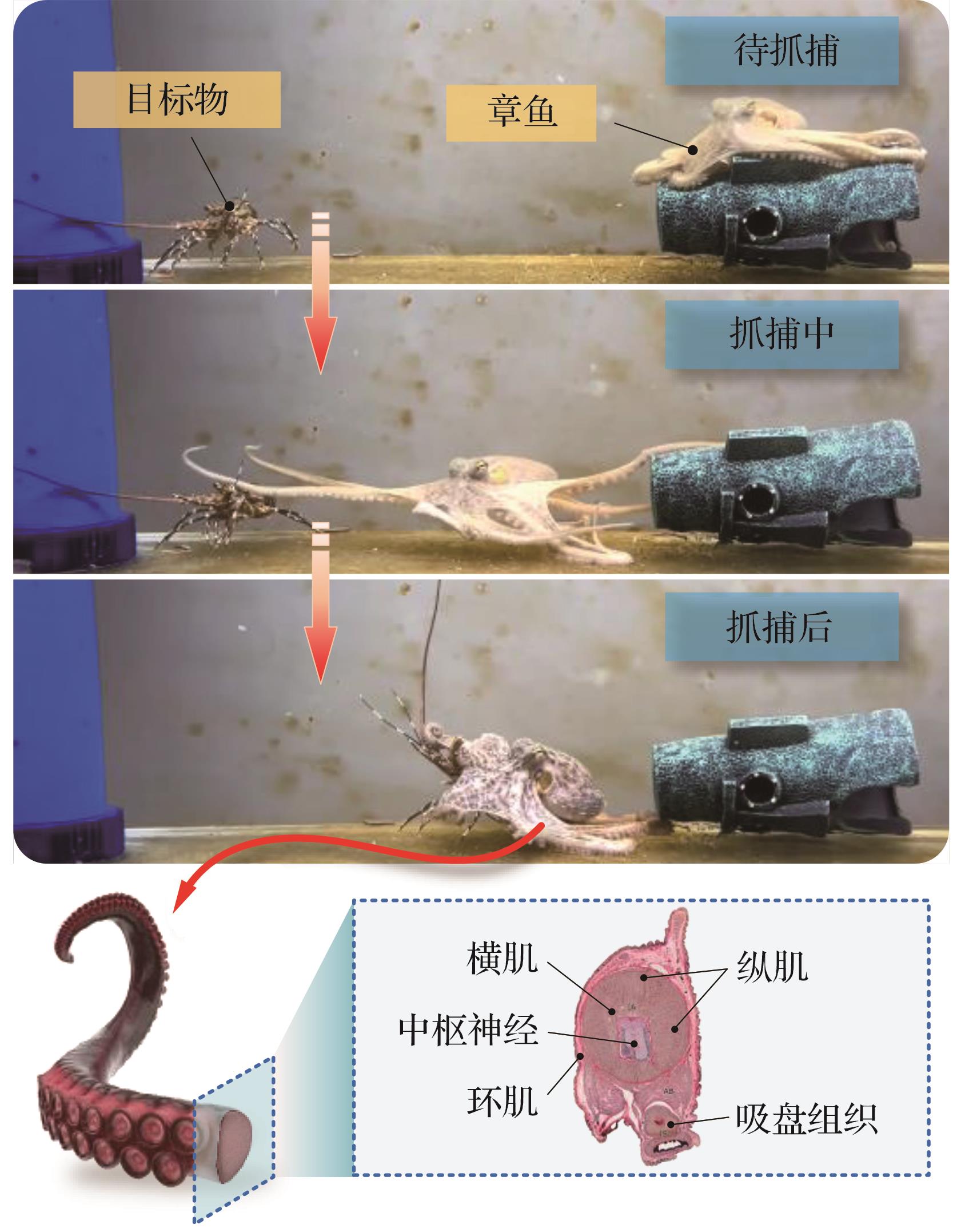
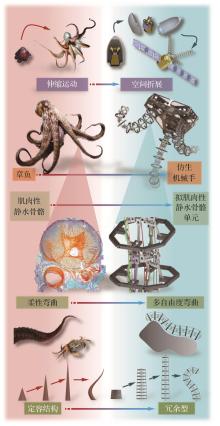
Fig.2
Bionic mapping relationship of octopus tentacles
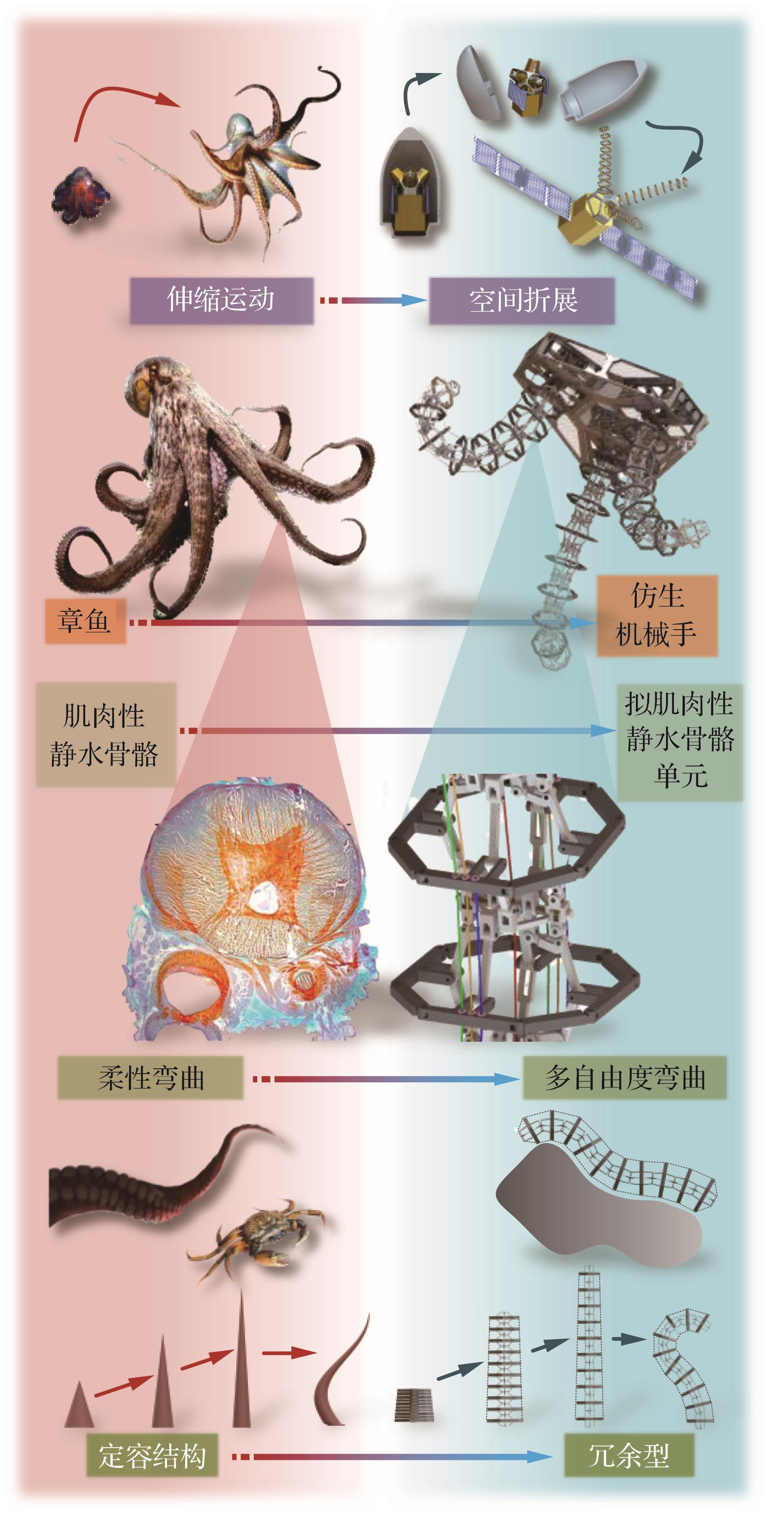
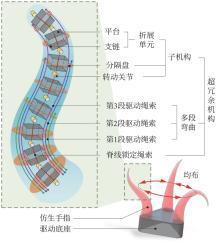
Fig.3
Design of overall scheme of manipulator
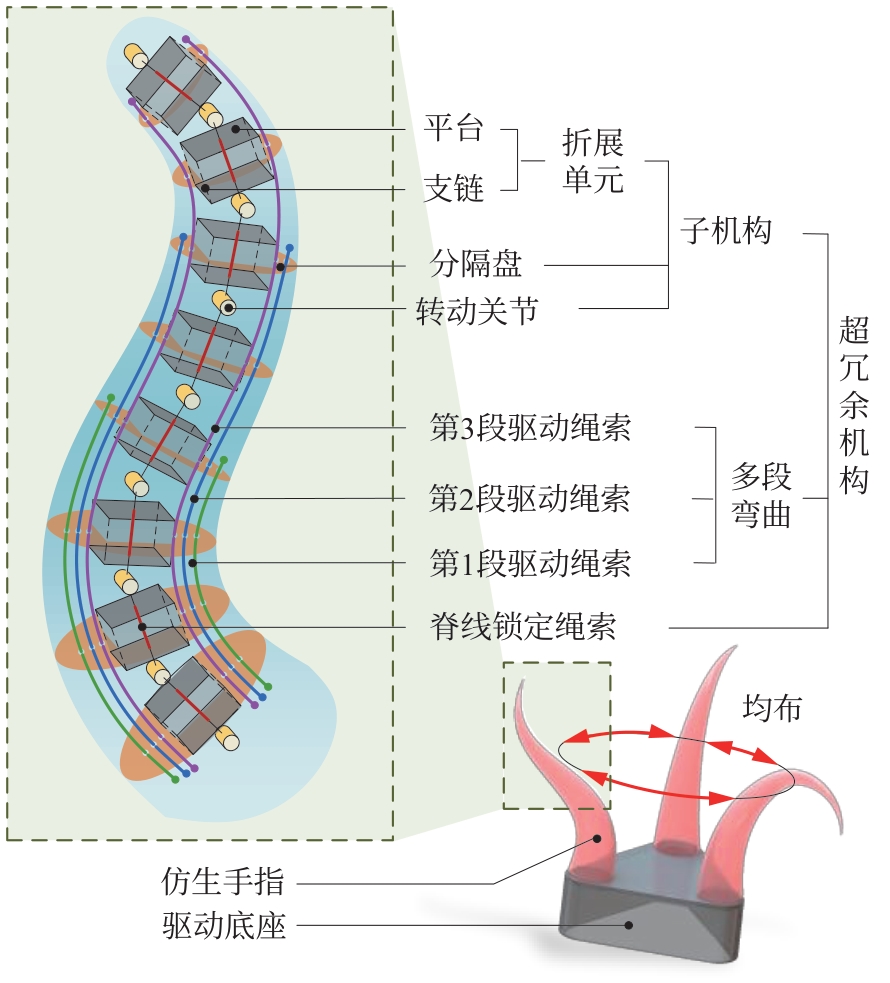
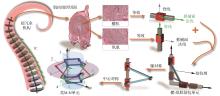
Fig.4
Bionic design of locally antagonistic mechanism
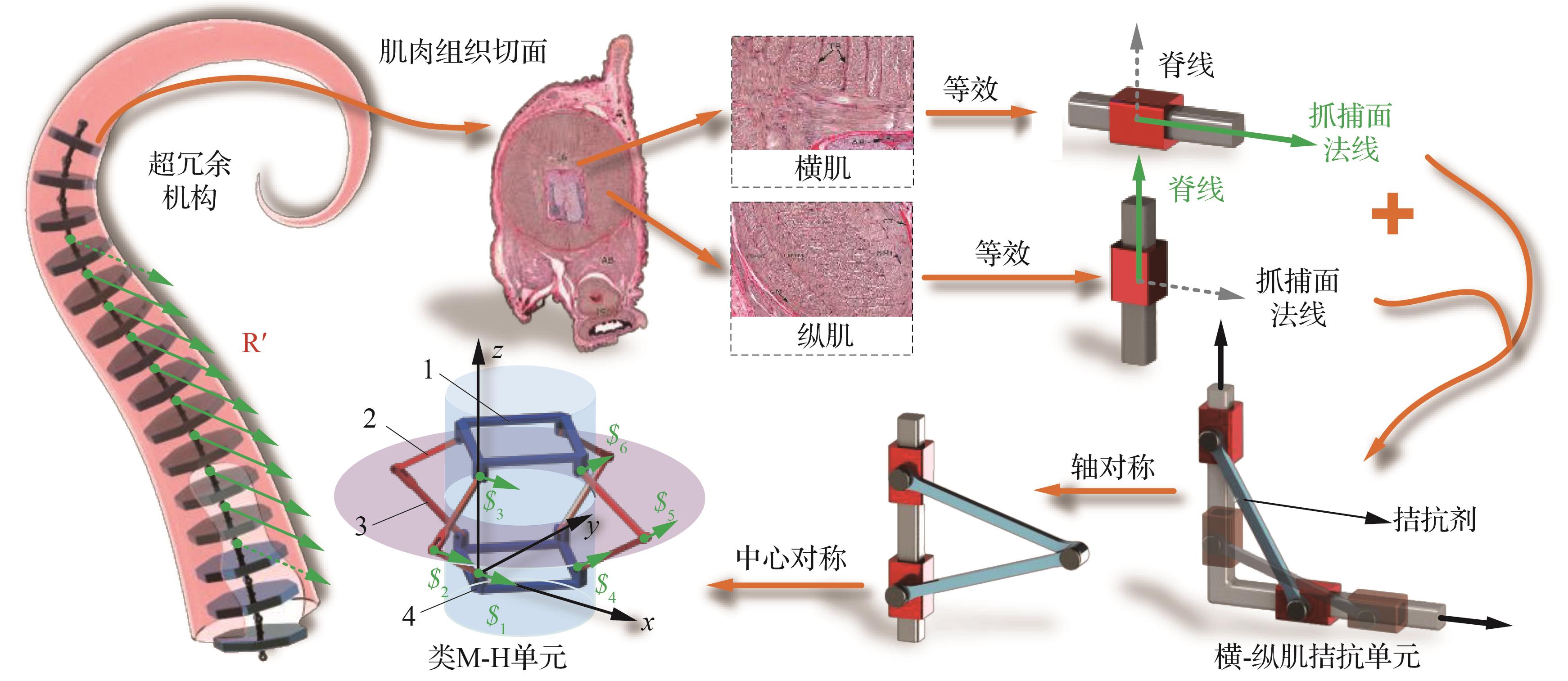
Fig.5
Topological graph of pantograph structure
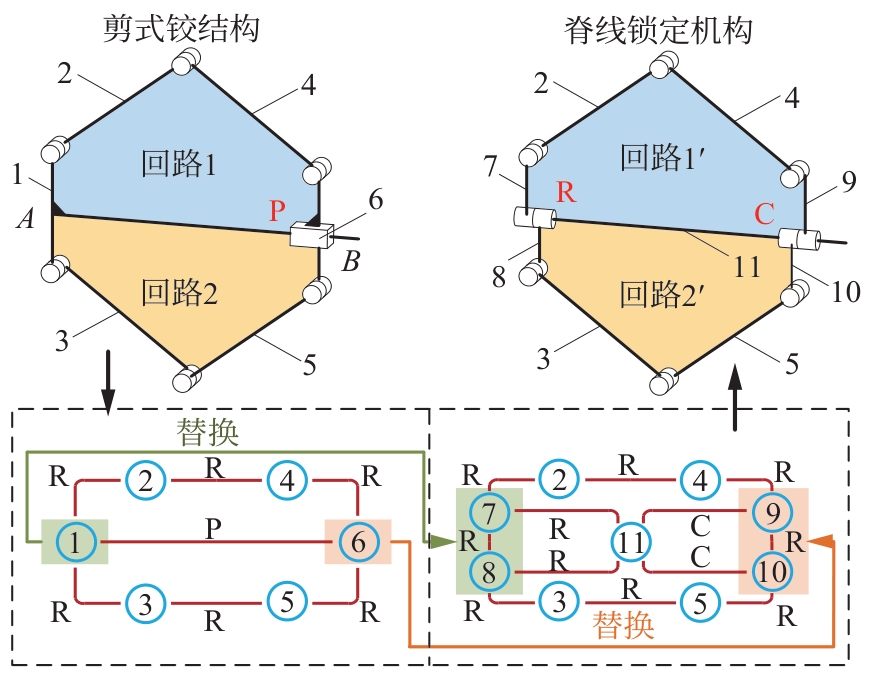
Fig.6
Equivalent mechanism and loop splitting
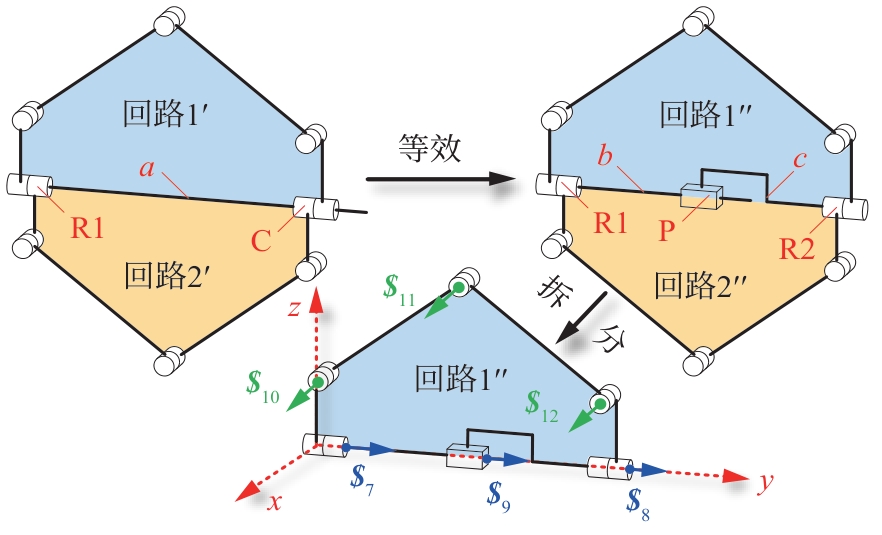
Fig.7
Motion mode of mechanism
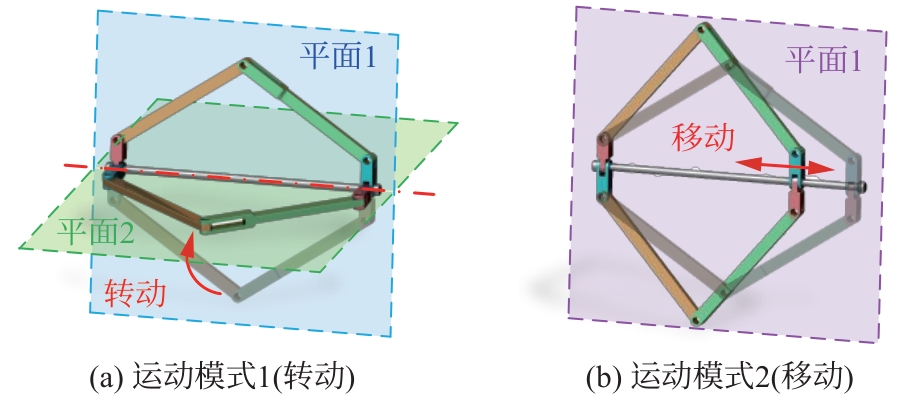
Fig.8
Design of generalized PRP sub-mechanism

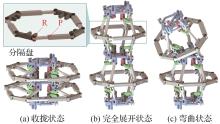
Fig.9
Three motion states of sub-mechanism
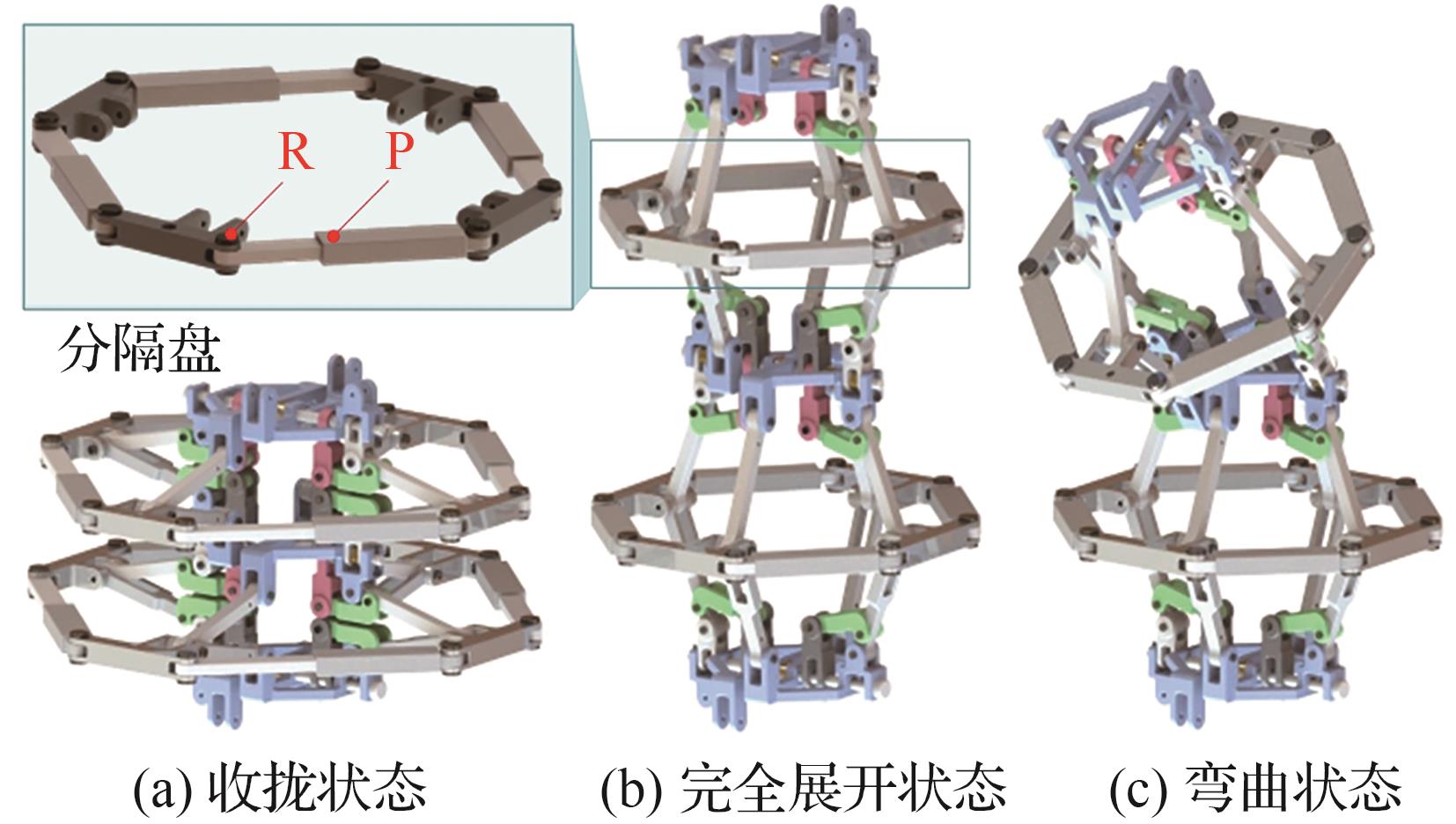
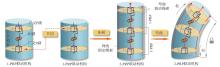
Fig.10
Bionic design of multi-module constant volume structure
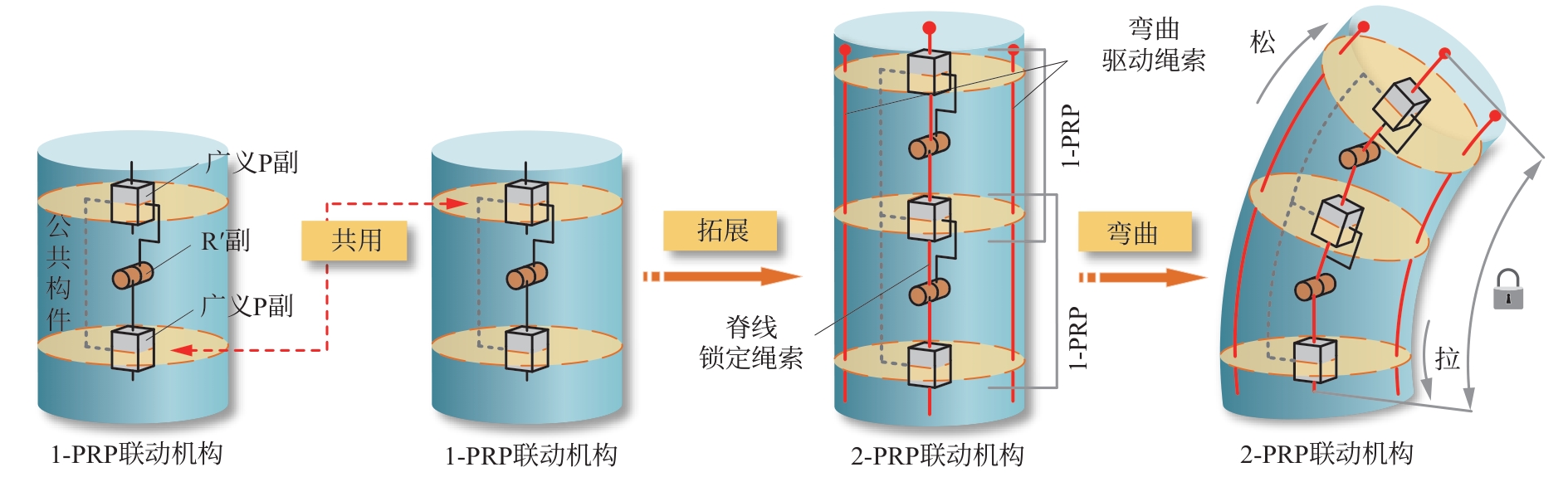

Fig.11
Capture process of bionic manipulator

Fig.12
Kinematics description of super-redundant robotics
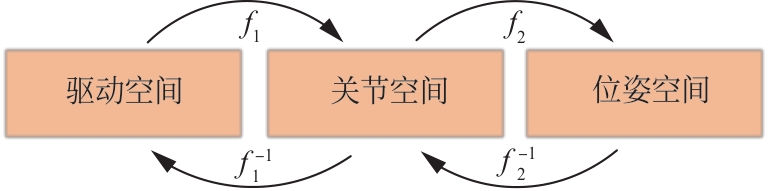
Fig.13
Single-stage bending parameter model
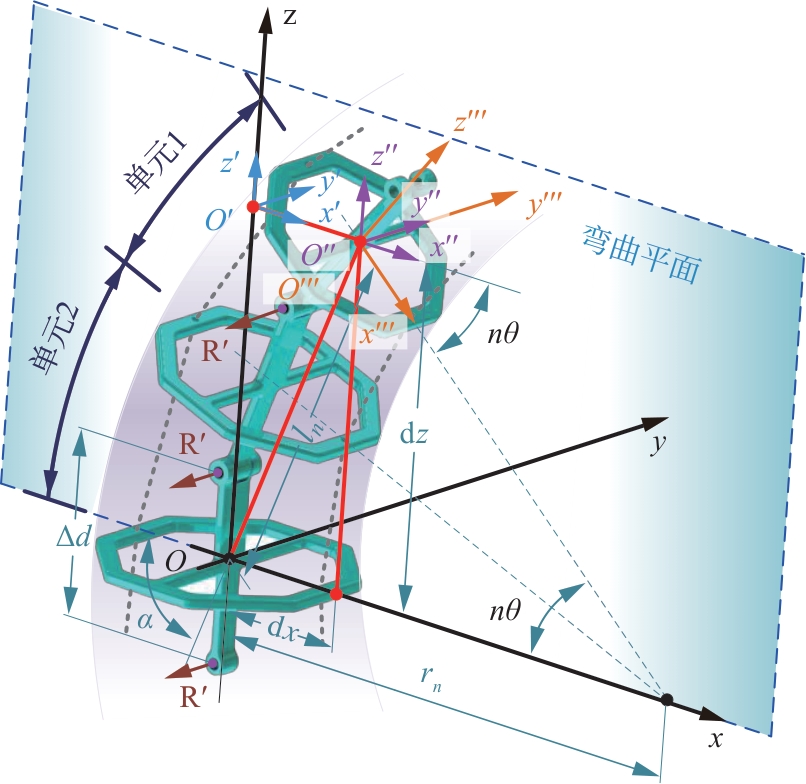

Fig.14
Three-stage bending parameter model
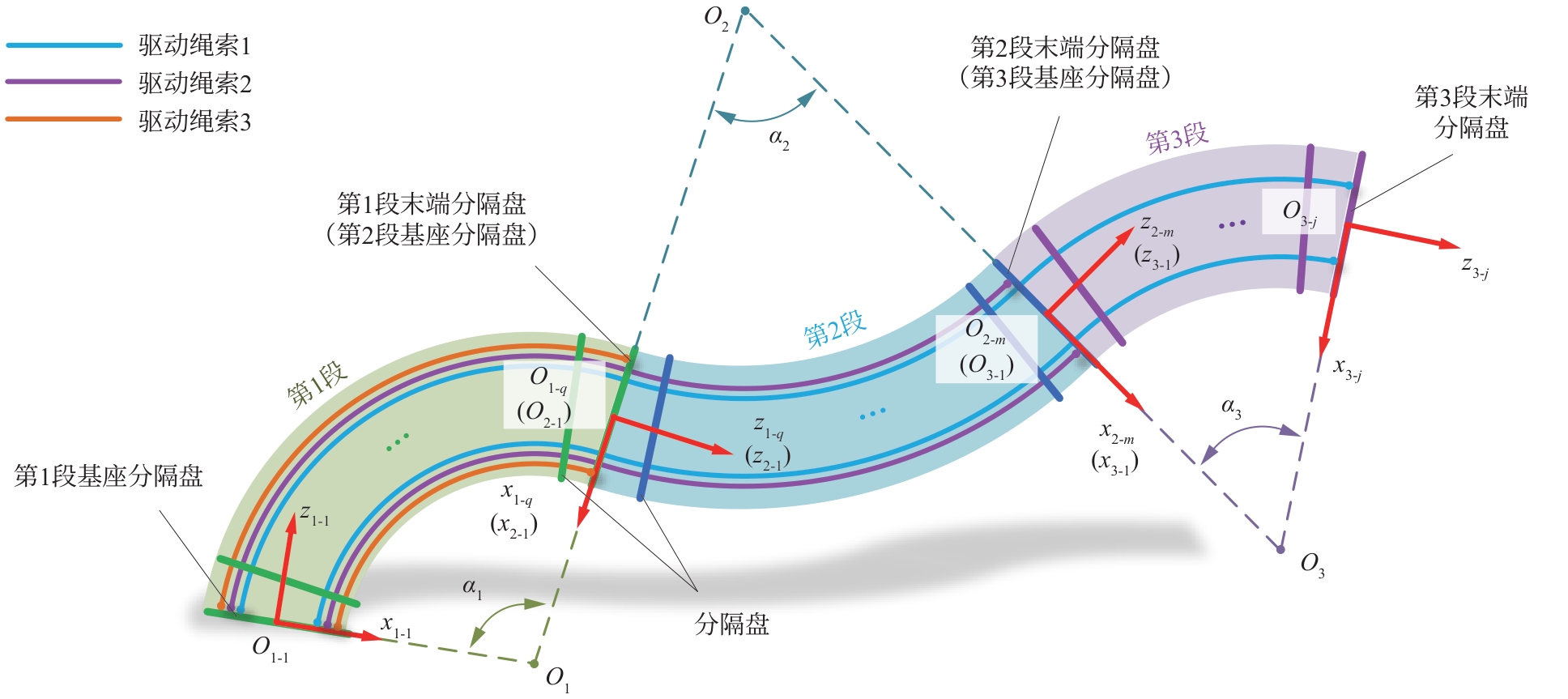
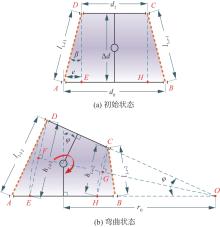
Fig.15
State parameters of single joint driven by rope
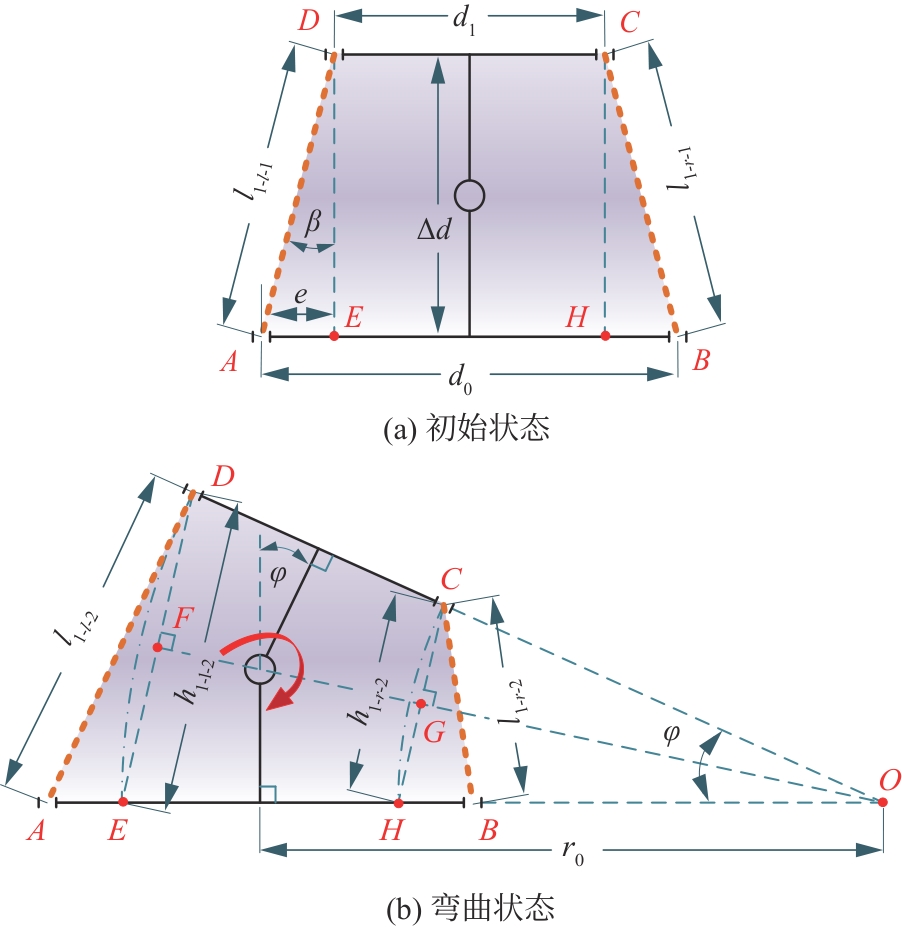
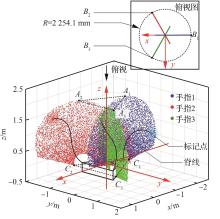
Fig.16
Workspace of bionic mechanical finger
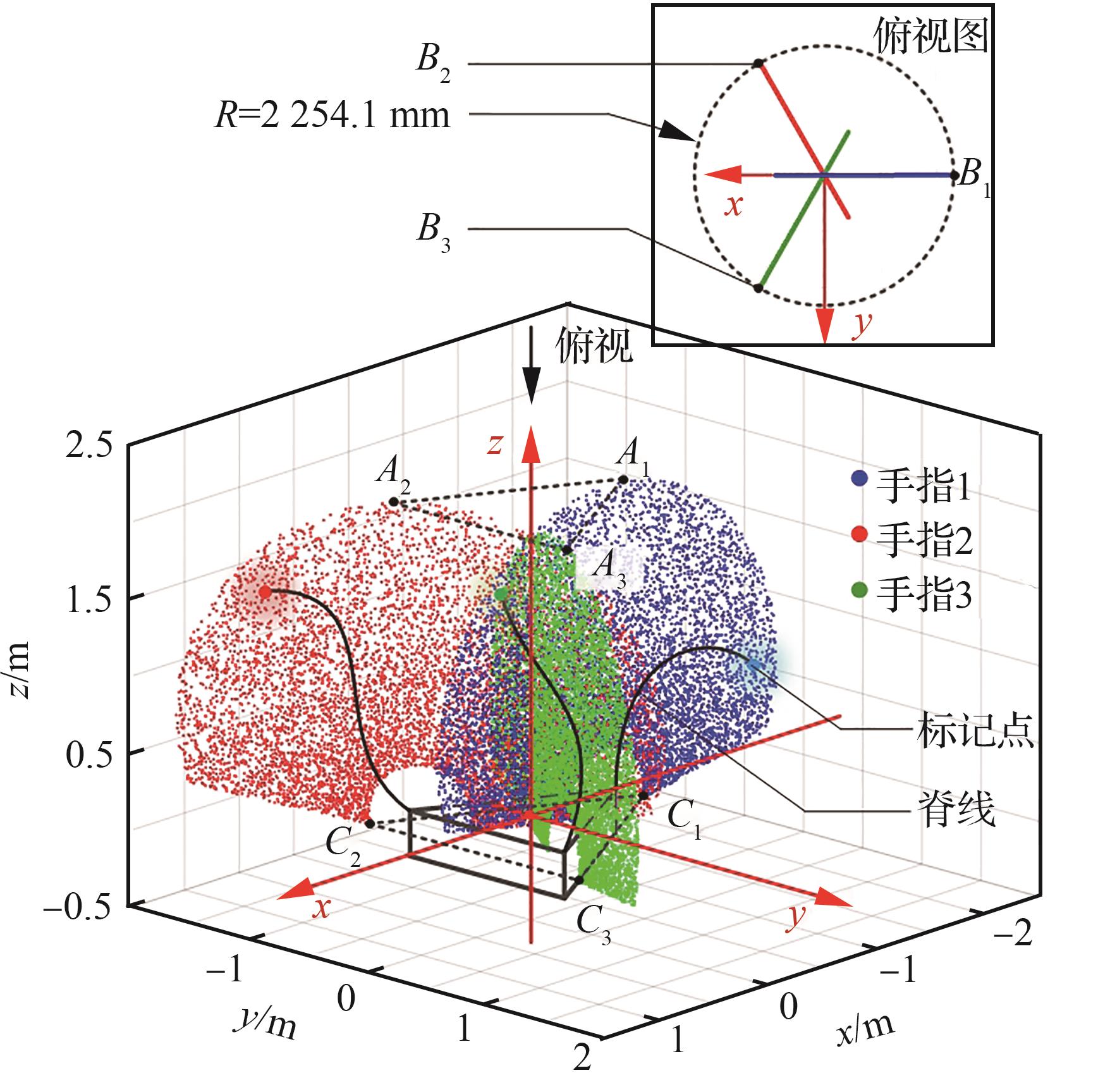
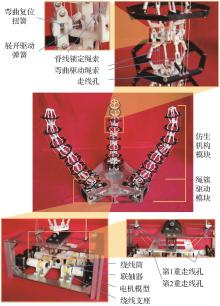
Fig.17
Principle prototype of bionic manipulator
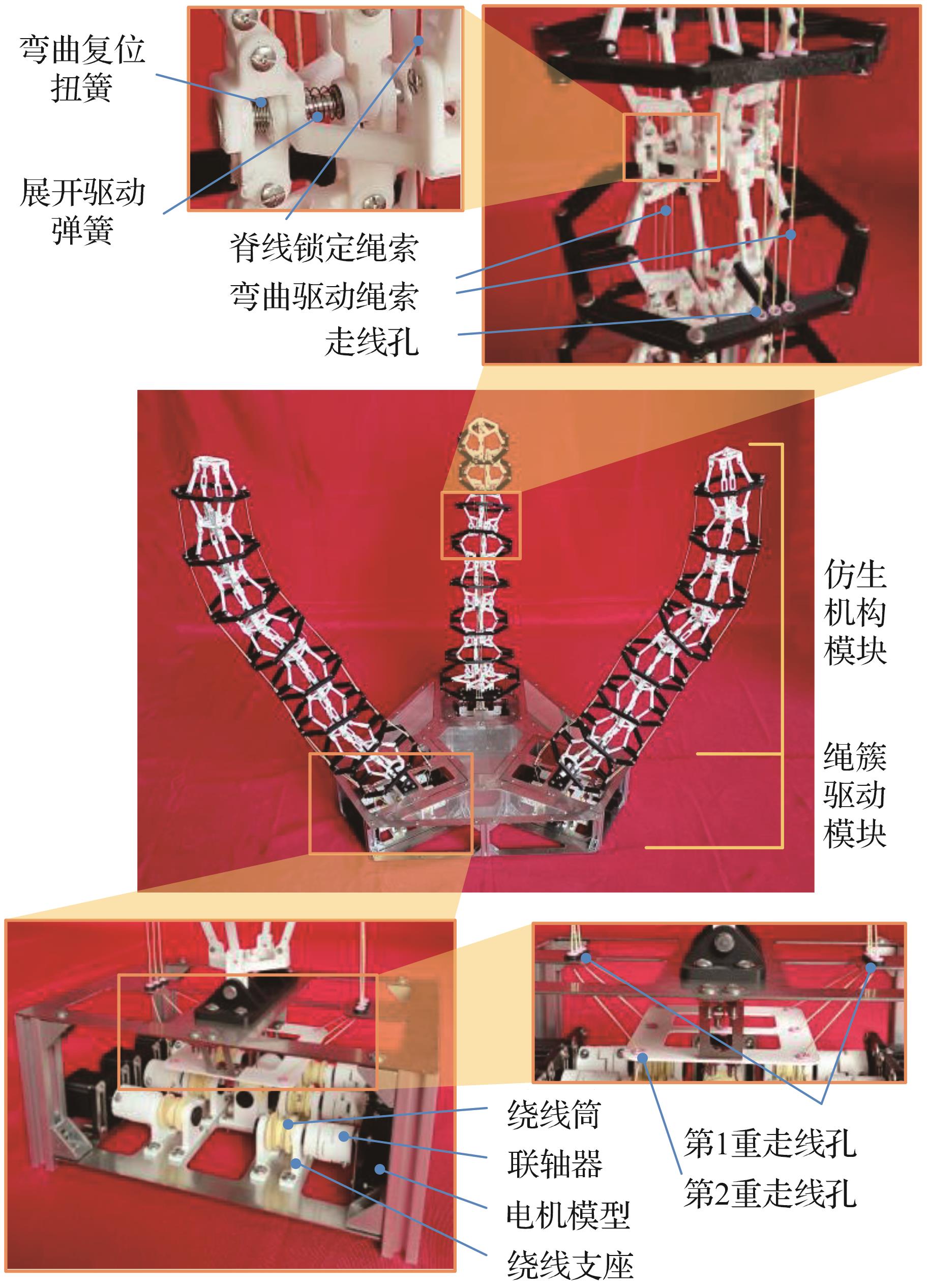
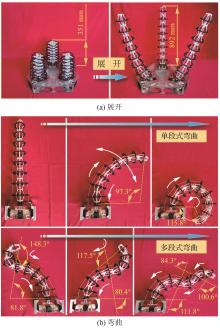
Fig.18
Deployment and bending functionality testing of bionic finger
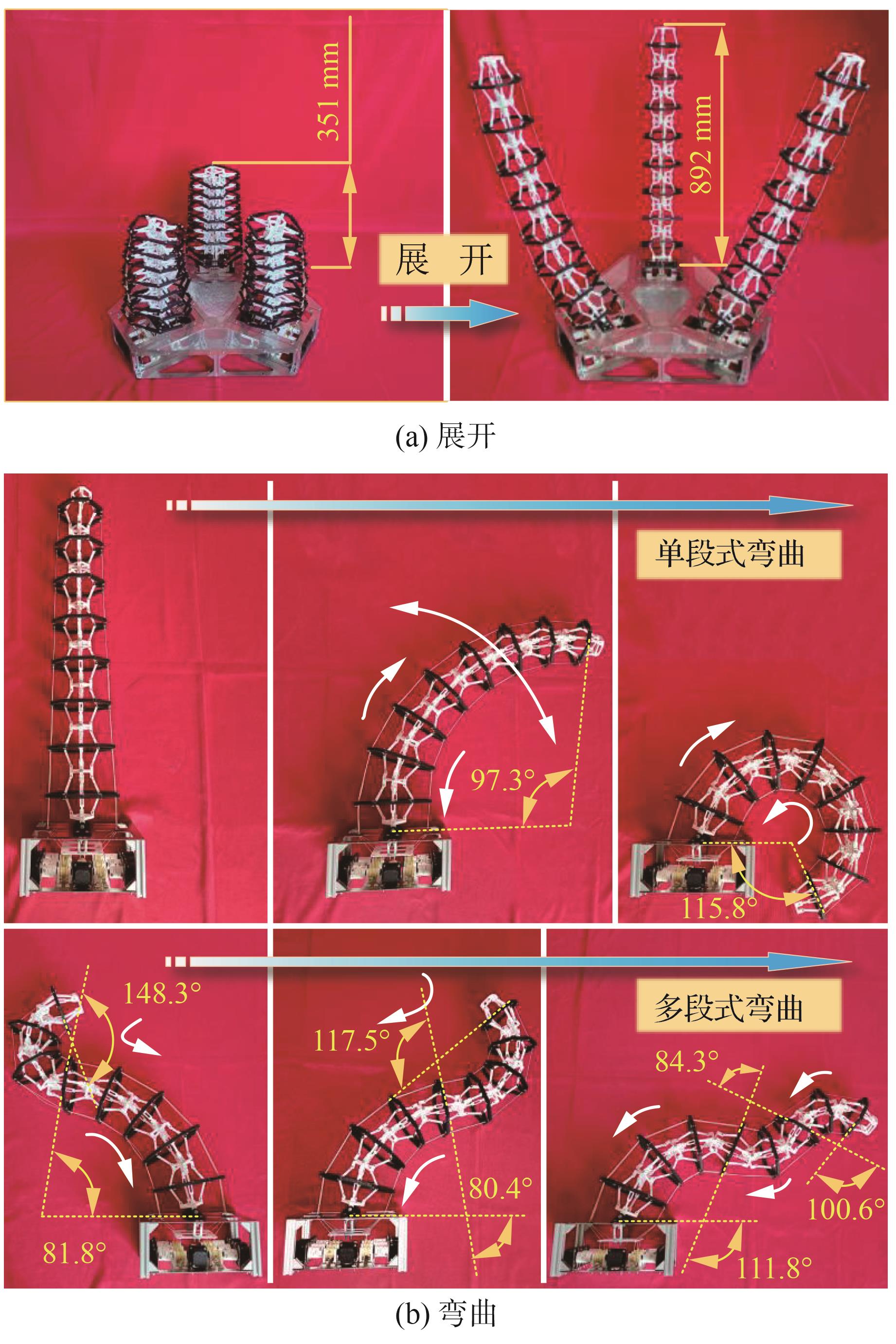

Fig.19
Capture function test of bionic finger

| [1] | 王国庆, 熊焕, 侯俊杰. 数字时代的航天系统工程[J]. 机械工程学报, 2024, 60(14): 206-214. |
| WANG G Q, XIONG H, HOU J J. China aerospace systems engineering method in the digital age[J]. Journal of Mechanical Engineering, 2024, 60(14): 206-214 (in Chinese). | |
| [2] | LONG J, HUANG C Y. Obligations and liabilities concerning the active removal of foreign space debris: A global governance perspective[J]. Acta Astronautica, 2024, 222: 422-435. |
| [3] | PANG B J, WANG D F, XIAO W K, et al. Space debris cumulative flux considering the interval distance-based method[J]. Advances in Space Research, 2021, 67(8): 2274-2281. |
| [4] | 许英杰, 刘晓路, 贺仁杰, 等. 空间碎片主动移除任务规划研究综述[J]. 控制与决策, 2024, 39(2): 371-380. |
| XU Y J, LIU X L, HE R J, et al. Space debris active removal mission planning: A review[J]. Control and Decision, 2024, 39(2): 371-380 (in Chinese). | |
| [5] | VIMALESH M, PHILIPPE W, CHRISTINE C. Design considerations and workspace computation of 2-X and 2-R planar cable-driven tensegrity-inspired manipulators[J]. Mechanism and Machine Theory, 2024, 195: 105610. |
| [6] | XU K, ZHUANG X H, QIAO A W, et al. Design and analysis of a novel deployable grasping manipulator for space object capture[J]. Acta Astronautica, 2024, 224: 266-280. |
| [7] | ZHANG Y, KANG X, LI B. A family of folding single-loop metamorphic mechanisms for aerospace manipulators: Synthesis, network, and analysis[J]. Mechanism and Machine Theory, 2024, 201: 105728. |
| [8] | ZHAO C, GUO H W, LIU R Q, et al. Actuation distribution and workspace analysis of a novel 3(3RRIS) metamorphic serial-parallel manipulator for grasping space non-cooperative targets[J]. Mechanism and Machine Theory, 2019, 139: 424-442. |
| [9] | LI G T, XU P, QIAO S L, et al. Stability analysis and optimal enveloping grasp planning of a deployable robotic hand[J]. Mechanism and Machine Theory, 2021, 158: 104241. |
| [10] | 韩博, 杨名, 骆明炎, 等. 单驱动空间可展开变胞捕获机械手设计与分析[J]. 机械工程学报, 2024, 61(1): 30-43. |
| HAN B, YANG M, LUO M Y, et al. Design and analysis of a single-drive space deployable metamorphic capture manipulator[J]. Journal of Mechanical Engineering, 2024, 61(1): 30-43 (in Chinese). | |
| [11] | QIAO S L, GUO H W, LIU R Q, et al. Self-adaptive grasp process and equilibrium configuration analysis of a 3-DOF UACT robotic finger[J]. Mechanism and Machine Theory, 2019, 133: 250-266. |
| [12] | ZHANG B T, SUN J L, HU H Y. Deployment dynamics and experiments of a tendon-actuated flexible manipulator[J]. Chinese Journal of Aeronautics, 2024, 38(2): 103008. |
| [13] | 戴建生, 安伟, 王瑞钦, 等. 基于可重构虎克铰链副的仿人变胞手设计与分析[J]. 天津大学学报, 2022, 55(3): 221-229. |
| DAI J S, AN W, WANG R Q, et al. Design and analysis of a humanoid metamorphic hand based on reconfigurable Hooke joints[J]. Journal of Tianjin University, 2022, 55(3): 221-229 (in Chinese). | |
| [14] | 龙奕琳, 王彬峦, 金弘哲, 等. 基于差动轮系的变刚度执行器及变刚度柔性手爪[J]. 机械工程学报, 2023, 59(1): 91-102. |
| LONG Y L, WANG B L, JIN H Z, et al. Variable stiffness actuator and variable stiffness flexible gripper based on differential gear train[J]. Journal of Mechanical Engineering, 2023, 59(1): 91-102 (in Chinese). | |
| [15] | WANG G, ZHANG Q H, HU X . et al. Capture dynamics and driving method of origami capture mechanism in orbit[J]. Thin-Walled Structures, 2024, 201: 112019. |
| [16] | WANG S, YAN P, HUANG H L, et al. Inflatable metamorphic origami[J]. Research, 2023, 6: 0133. |
| [17] | 杨慧, 汪祥, 乔尚岭, 等. Kresling和Miura折痕混合型三指机械手的运动学分析及其设计[J]. 机器人, 2022, 44(1): 35-44. |
| YANG H, WANG X, QIAO S L, et al. Design and kinematics analysis of a three-finger manipulator with Kresling and Miura hybrid origami crease[J]. Robot, 2022, 44(1): 35-44 (in Chinese). | |
| [18] | MARGHERI L, LASCHI C, MAZZOLAI B. Soft robotic arm inspired by the octopus: I. From biological functions to artificial requirements[J]. Bioinspiration & Biomimetics, 2012, 7(2): 1-12. |
| [19] | MATSUDA R, MAVINKURVE U, KANADA A, et al. A woodpecker’s tongue-inspired, bendable and extendable robot manipulator with structural stiffness[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 3334-3341. |
| [20] | XIE Z X, DOMEL AUGUST G., NING AN . et al. Octopus arm-inspired tapered soft actuators with suckers for improved grasping[J]. Soft Robotics, 2020, 7(5): 639-648. |
| [21] | 曹晟阁, 于靖军, 潘杰, 等. 滚动接触柔性连续体机器人的设计与运动能力分析[J]. 机械工程学报, 2021, 57(19): 21-29. |
| CAO S G, YU J J, PAN J, et al. Design and moving capability analysis of a flexible continuum robot with rolling contact[J]. Journal of Mechanical Engineering, 2021, 57(19): 21-29 (in Chinese). | |
| [22] | 梁斌, 徐文福, 王学谦, 等. 自由漂浮空间机器人捕获翻滚目标的力-位-型融合控制方法[J]. 宇航学报, 2024, 45(6): 958-969. |
| LIANG B, XU W F, WANG X Q, et al. Force-position-model fusion control of free-floating space robots for capturing tumbling targets[J]. Journal of Astronautics, 2024, 45(6): 958-969 (in Chinese). | |
| [23] | SHEN W J, YANG G L, ZHENG T J, et al. An accuracy enhancement method for a cable-driven continuum robot with a flexible backbone[J]. IEEE Access, 2020, 8: 37474-37481. |
| [24] | 冯笑笑, 胡海燕, 李龙委, 等. 基于力感知的结肠镜机器人柔顺控制[J]. 机器人, 2016, 38(2): 217-224. |
| FENG X X, HU H Y, LI L W, et al. A compliant control of a colonoscopy robot based on force sensing[J]. Robot, 2016, 38(2): 217-224 (in Chinese). | |
| [25] | 孟光, 韩亮亮, 张崇峰. 空间机器人研究进展及技术挑战[J]. 航空学报, 2021, 42(1): 523963. |
| MENG G, HAN L L, ZHANG C F. Research progress and technical challenges of space robot[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 523963 (in Chinese). | |
| [26] | 潘杰, 于靖军, 裴旭. 柔性手爪机构设计与变刚度技术研究发展综述[J]. 机械工程学报, 2024, 60(13): 281-296. |
| PAN J, YU J J, PEI X. Development of flexible gripper mechanism design and variable stiffness technology research[J]. Journal of Mechanical Engineering, 2024, 60(13): 281-296 (in Chinese). | |
| [27] | 陶永, 刘海涛, 王田苗, 等. 我国服务机器人技术研究进展与产业化发展趋势[J]. 机械工程学报, 2022, 58(18): 56-74. |
| TAO Y, LIU H T, WANG T M, et al. Research progress and industrialization development trend of Chinese service robot[J]. Journal of Mechanical Engineering, 2022, 58(18): 56-74 (in Chinese). | |
| [28] | GAOZHANG W L, LI Y, SHI J L, et al. A novel stiffness-controllable joint using antagonistic actuation principles[J]. Mechanism and Machine Theory, 2024, 196: 105614. |
| [29] | KIER W M, STELLA M P. The arrangement and function of octopus arm musculature and connective tissue[J]. Journal of Morphology, 2007, 268(10): 831-843. |
| [30] | 邓宗全. 空间折展机构设计[M]. 哈尔滨: 哈尔滨工业大学出版社, 2013: 93-98. |
| DENG Z Q. Design of space deployable and foldable mechanisms[M]. Harbin: Harbin Institute of Technology Press, 2013: 93-98 (in Chinese). | |
| [31] | 黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 北京: 高等教育出版社, 2006: 121-137. |
| HUANG Z, ZHAO Y S, ZHAO T S. Advanced spatial mechanism[M]. Beijing: Higher Education Press, 2006: 121-137 (in Chinese). | |
| [32] | GARRIGA-CASANOVAS A, RODRIGUEZ Y BAENA F. Kinematics of continuum robots with constant curvature bending and extension capabilities[J]. Journal of Mechanisms and Robotics, 2019, 11(1): 011010. |
| [33] | 王巍, 綦磊, 闫军, 等. 微小空间碎片多参数在轨探测技术[J]. 空间科学与试验学报, 2024, 1(2): 100-105. |
| WANG W, QI L, YAN J, et al. Micro-space-debris multiple-parameter in-situ measurement[J]. Journal of Space Science Experiment, 2024, 1(2): 100-105 (in Chinese). |
| [1] | Guirong ZHOU, Jianyuan XU, Shaobo MA, Junyao ZONG, Jinqing SHEN, Haijie ZHU. Review of key technologies for avionics systems integration on large passenger aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529956-529956. |
| [2] | Heye XIAO, Jianfeng YANG, Junqiang BAI, Xudong ZHANG, Lirong WU. Modular UAVs configuration method responded to task requirements [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327100-327100. |
| [3] | Chen WANG, Qianqian HUI, Fan ZHANG. Design of water⁃air cross⁃domain multi⁃mode coaxial UAV [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(21): 529047-529047. |
| [4] | Feng HE, Li ZHANG, Sifan YU, Xuan ZHOU. Schedulability analysis for multi-window partition based on network calculus model [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(2): 326581-326581. |
| [5] | Bo CHEN, Luyao GUO, Baozhu LIANG, Ze JIANG, Ming LI, Yundou XU, Yongsheng ZHAO. A two-way flat plate folding unit mechanism and motion process analysis [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(2): 426720-426720. |
| [6] | ZENG Guohong, DONG Yukun, WU Xuezhi, LUO Xiao, ZHAO Minru. Modular peer-to-peer control of dual-winding permanent magnet synchronous motor [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 325488-325488. |
| [7] | LI Chunpeng, ZHANG Tiejun, QIAN Zhansen, LIU Tiezhong. Aerodynamic design of modular configuration for multi-mission unmanned aerial vehicle [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(7): 125411-125411. |
| [8] | LUO Qing, ZHANG Tao, SHAN Peng, ZHANG Wentao, LIU Zihao. Generating reconfiguration blueprints for IMA systems based on improved Q-learning [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(8): 525792-525792. |
| [9] | LIU Weihui, LI Xiaohui, WEN Wen, ZHAO Jingchao, YAO Yan'an, LI Ruiming. Kinematics analysis of composite space capture systems based on 3RRS-Bricard [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(1): 523922-523922. |
| [10] | WANG Mingming, LUO Jianjun, YUAN Jianping, WANG Jiawen, LIU Cong. In-orbit assembly technology: Review [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(1): 523913-523913. |
| [11] | ZHAO Changxiao, HE Feng, LI Hao, WANG Peng. Dynamic reconfiguration method based on effectiveness for advanced fighter avionics system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(6): 523416-523416. |
| [12] | GUO Jinwei, HUANG Zhirong, XU Yundou, GUO Luyao, YAO Jiantao, ZHAO Yongsheng. Deployable antenna mechanism with class of modular truss based on tetrahedral combination unit [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(3): 423219-423219. |
| [13] | WANG Bo, YE Dong, SUN Zhaowei, TANG Shengyong, CHEN Xin. Hierarchical planning for on-orbit self-reconfiguration of modular reconfigurable satellites [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2019, 40(9): 322912-322912. |
| [14] | HAN Bo, XU Yundou, YAO Jiantao, ZHENG Dong, ZHANG Shuo, ZHAO Yongsheng. Kinematic characteristics analysis and assembly application of a spatial symmetric 7R mechanism [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2019, 40(4): 422536-422536. |
| [15] | LI Lifang, GUO Pengzhen, LIU Rongqiang. A space large-scale deployable compliant concentrator [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2018, 39(S1): 722187-722187. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341