Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (16): 331635.doi: 10.7527/S1000-6893.2024.31635
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Jiang ZHAO1, Minghao PI1, Bailing TIAN2, Pei CHI3( ), Yingxun WANG3
), Yingxun WANG3
Received:2024-12-09
Revised:2025-01-03
Accepted:2025-01-09
Online:2025-08-25
Published:2025-01-16
Contact:
Pei CHI
E-mail:peichi@buaa.edu.cn
Supported by:CLC Number:
Jiang ZHAO, Minghao PI, Bailing TIAN, Pei CHI, Yingxun WANG. Self-organized consensus decision-making method for swarm UAV tracking multiple targets[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331635.
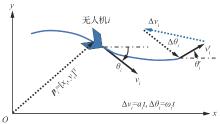
Fig.1
Kinematic model of UAV
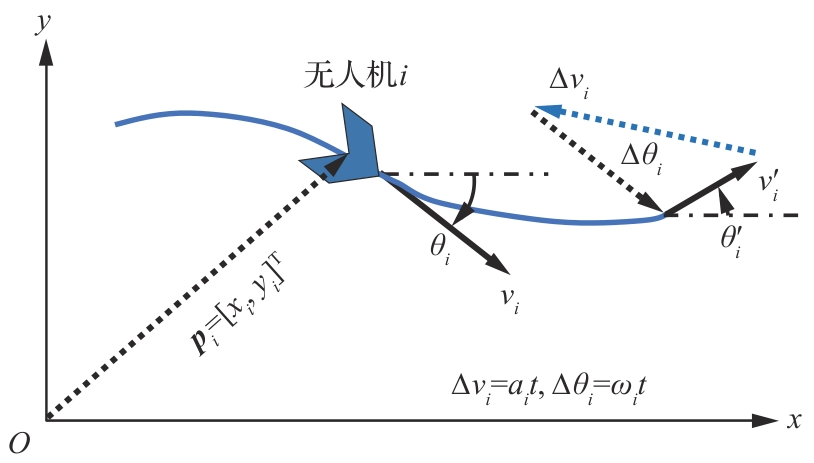
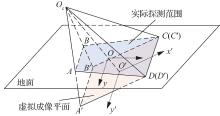
Fig.2
Sensor model of UAV
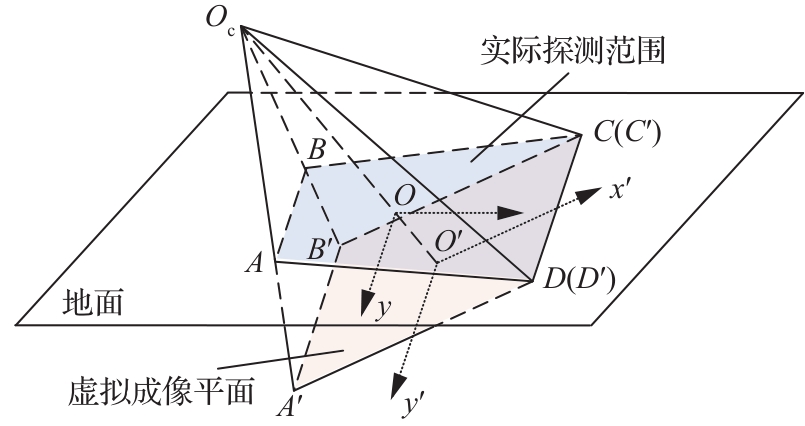
Fig.3
Communication model of UAV
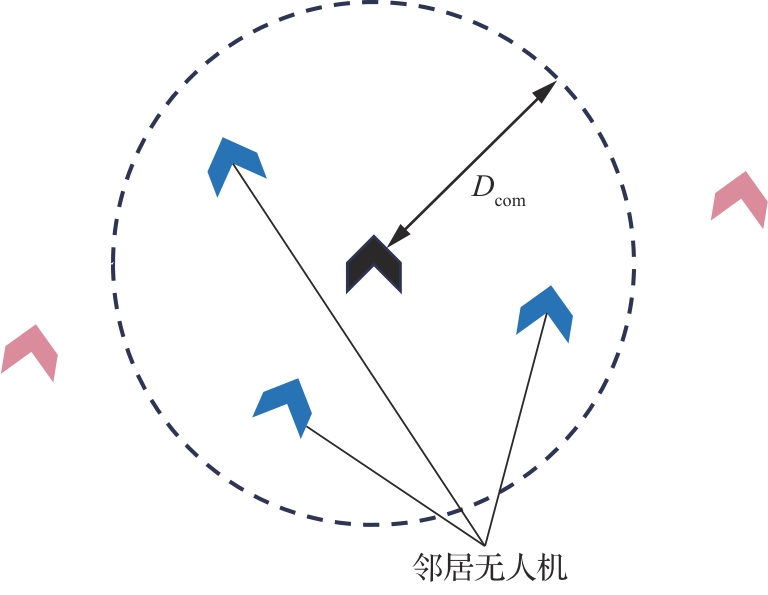

Fig.4
Multi-target tracking process of swarm UAV
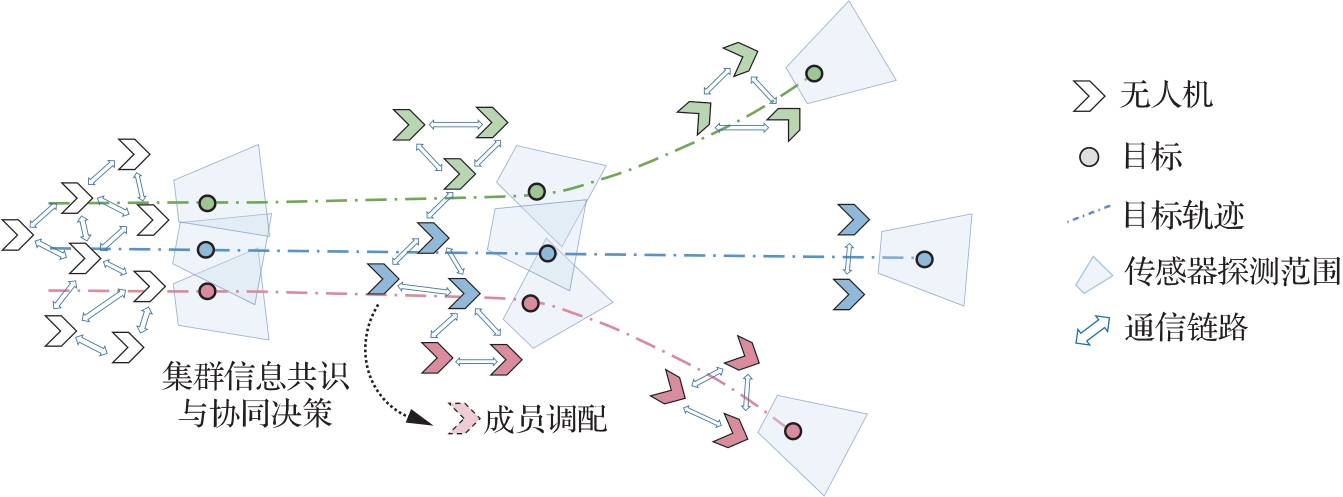
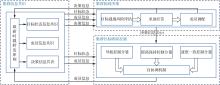
Fig.5
Architectural diagram of consensus decision-making method for swarm UAVs
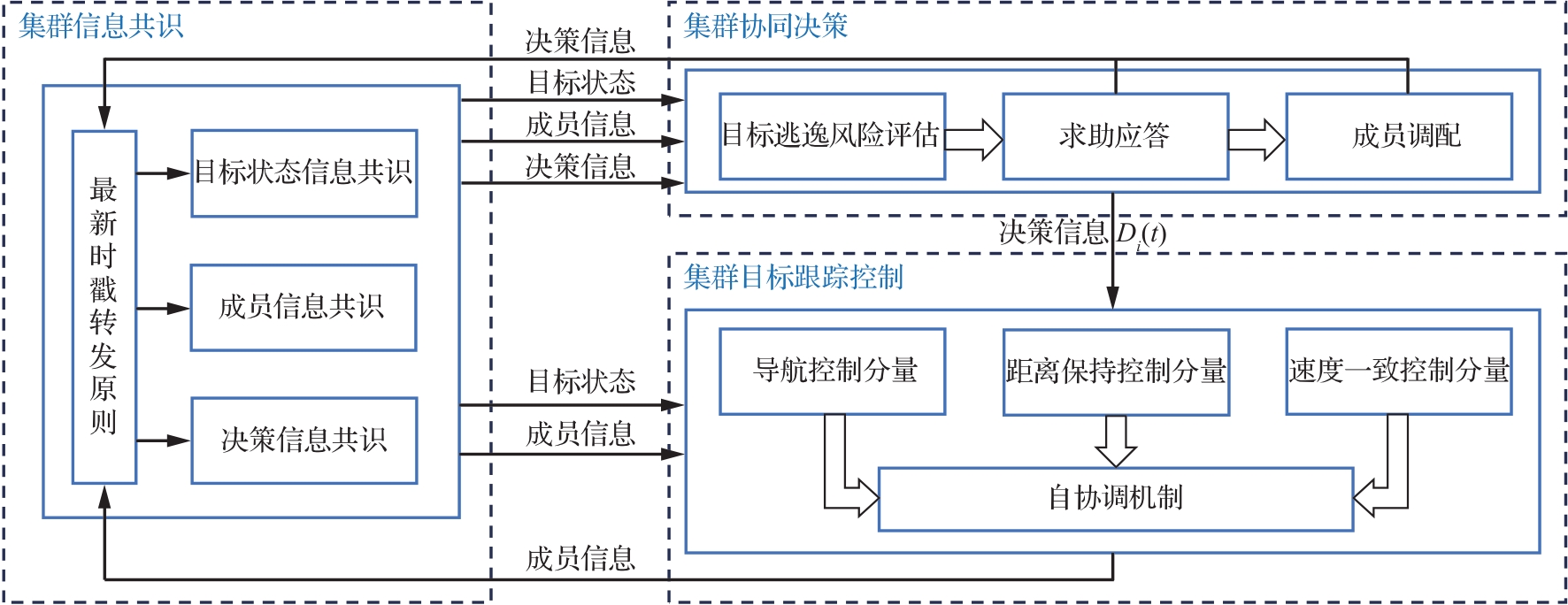

Fig.6
Sequence relationship diagram of consensus decision-making method

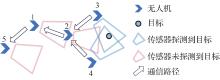
Fig.7
Transmission path of target position information
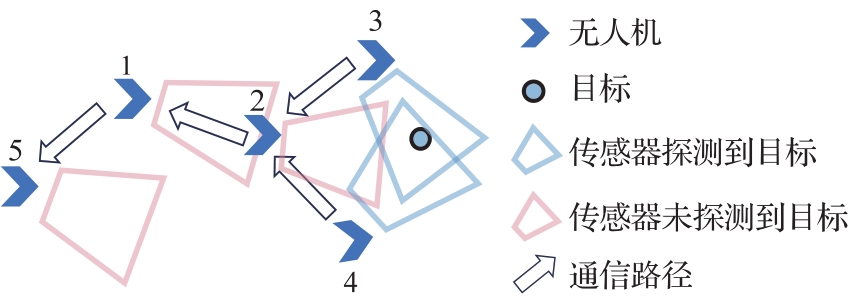

Fig.8
Transmission process of target state information
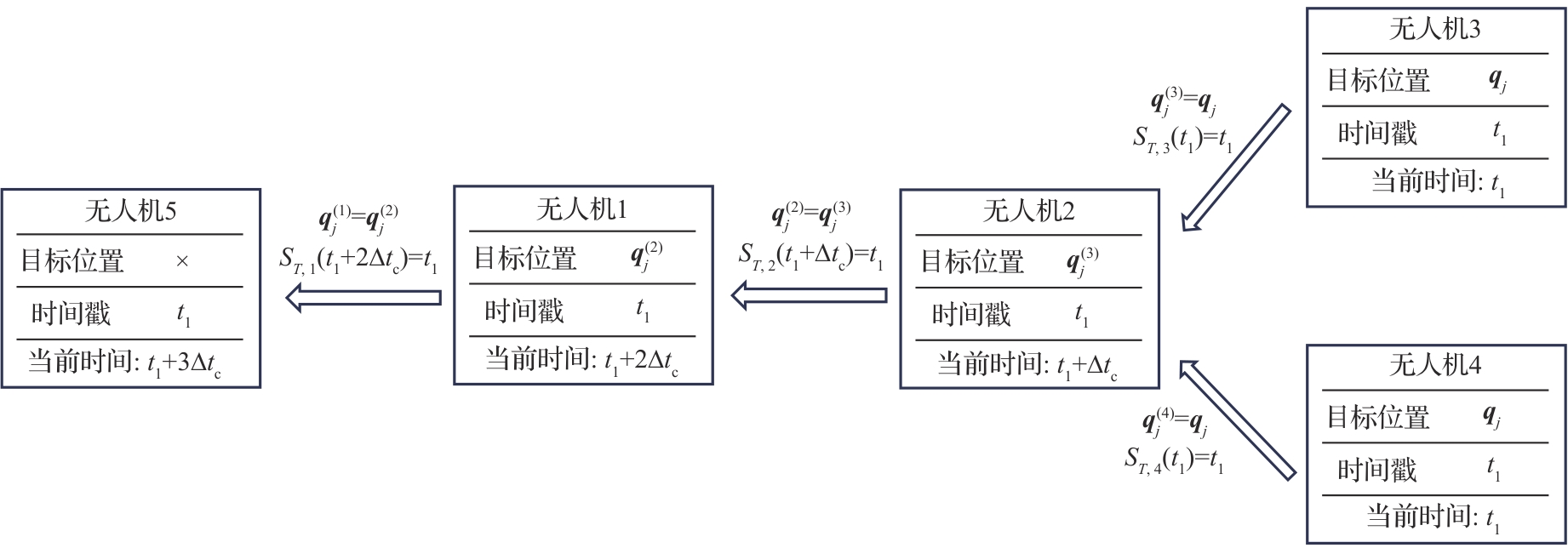
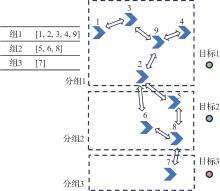
Fig.9
Group information consensus
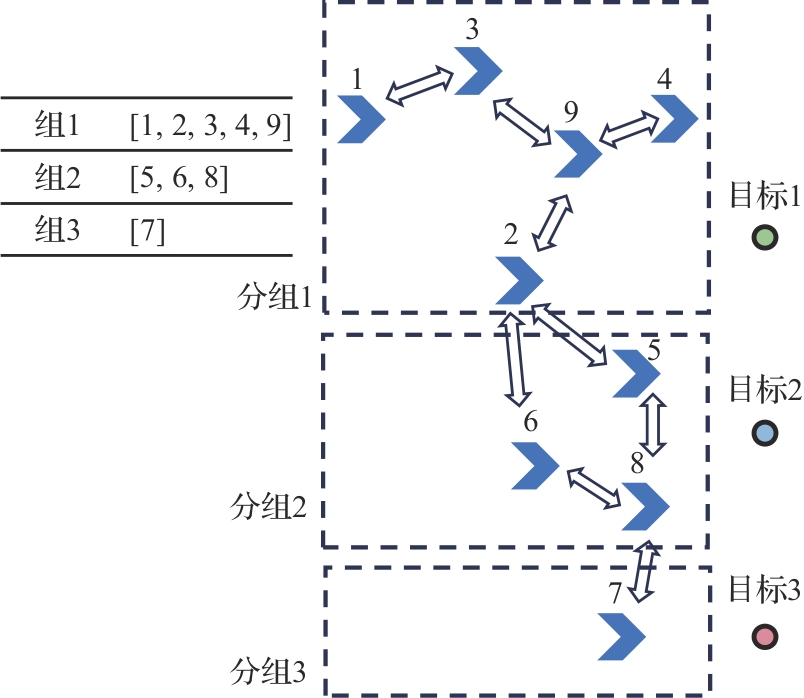
Fig.10
Architectural diagram of swarm collaborative decision-making
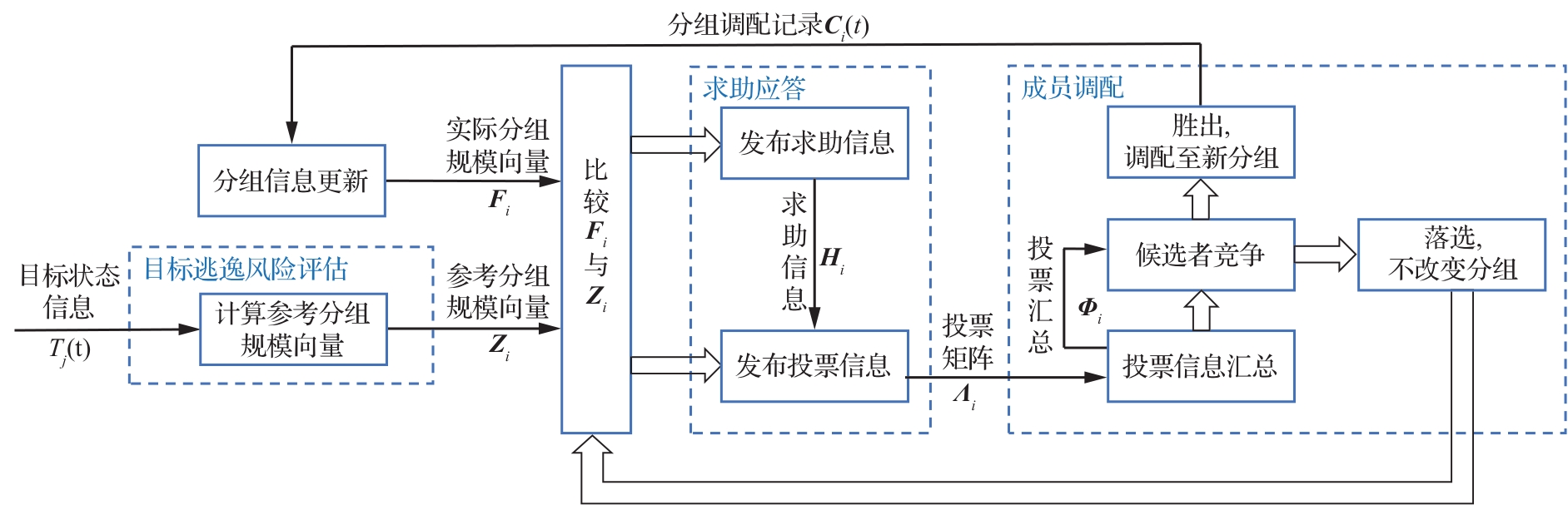
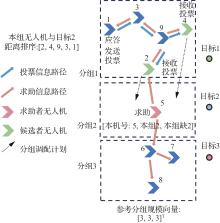
Fig.11
Transmission path of request-response information
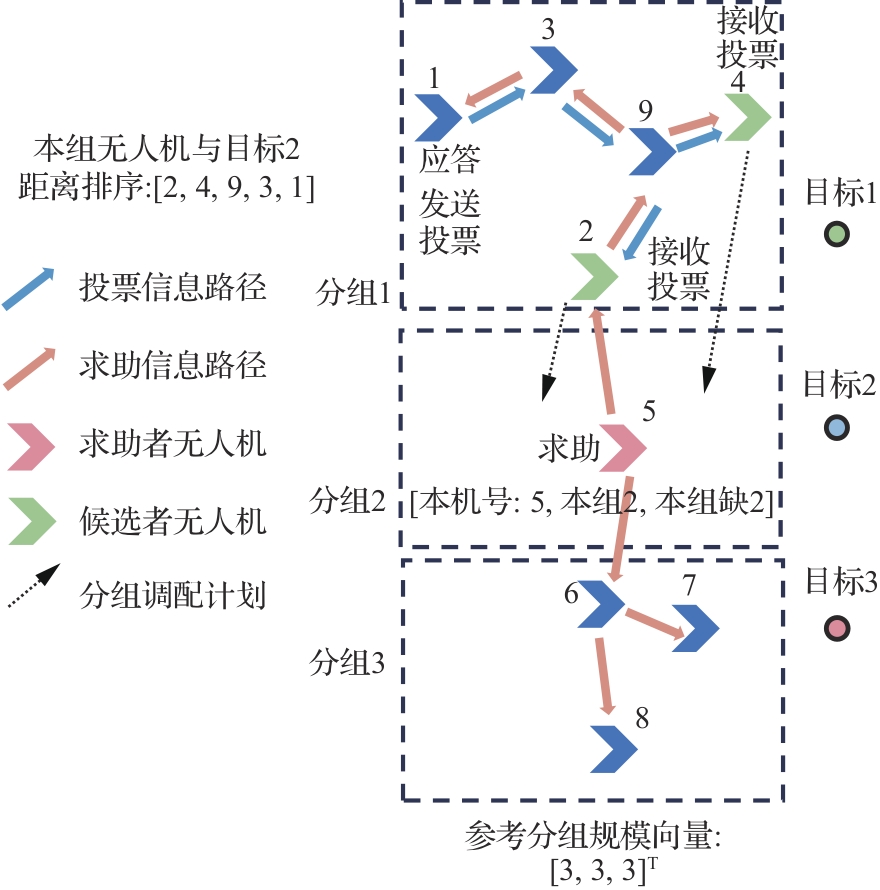
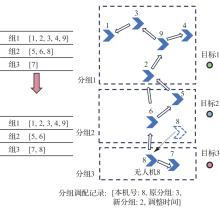
Fig.12
Transmission and function of group allocation information
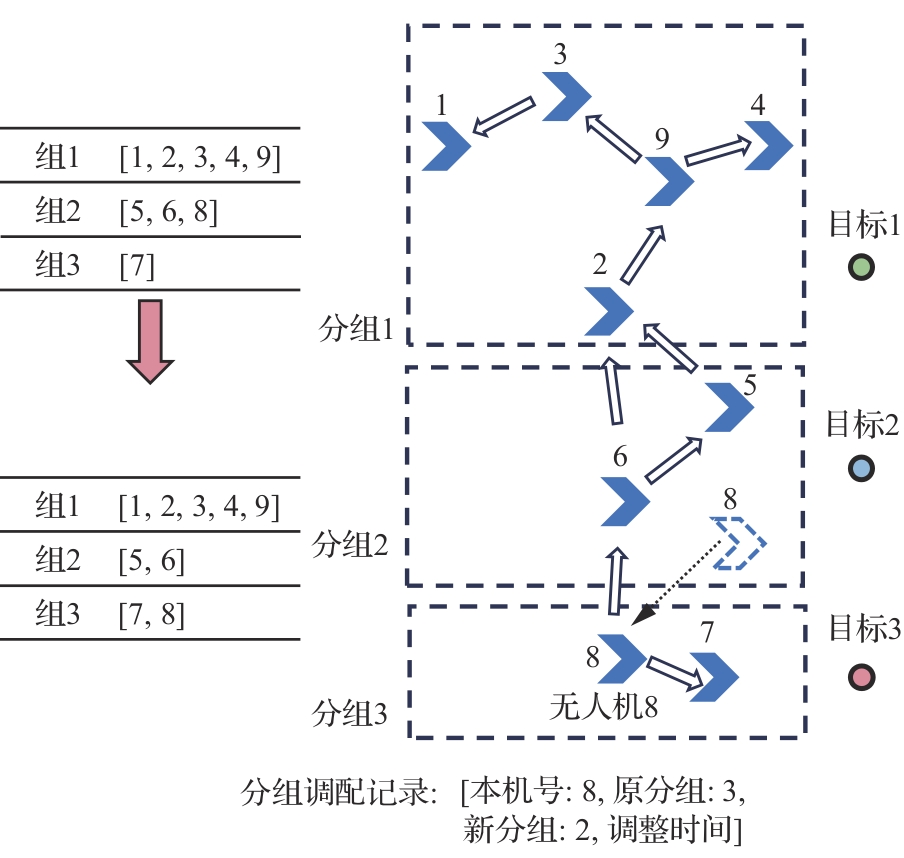
Table 1
Fixed parameter values of consensus decision-making method
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| 60 | 200 | ||
| 2 | 20,2 | ||
| 6 | 20,2 | ||
| 200 | 10 | ||
| 50 | 5 | ||
| 50 | 10 |
Table 2
Target separation path
| 目标 | 1 | 2 | 3 |
|---|---|---|---|
| 阶段1 | 左转 | 直行 | 右转 |
| 阶段2 | 直行 | 直行 | 直行 |
| 转弯半径 |
Table 3
Condition parameters and performance indices
| 参数类型 | 参数名称 | 符号 |
|---|---|---|
| 条件参数 | 通信距离 | Dcom |
| 通信时延 | Δtc | |
| 共识决策周期 | τr | |
| 接收时间阈值 | Δtmax | |
| 目标转弯角度 | γ | |
| 目标转弯半径 | Rsep | |
| 性能指标 | 时间代价 | tcost |
| 路径代价 | pcost | |
| 集群分组能耗 | ecost | |
| 分组信息不一致程度 | ηgroup | |
| 目标信息不一致程度 | ηtar | |
| 无差率 | ηacc |
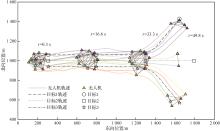
Fig.13
Trajectories of swarm UAV and targets
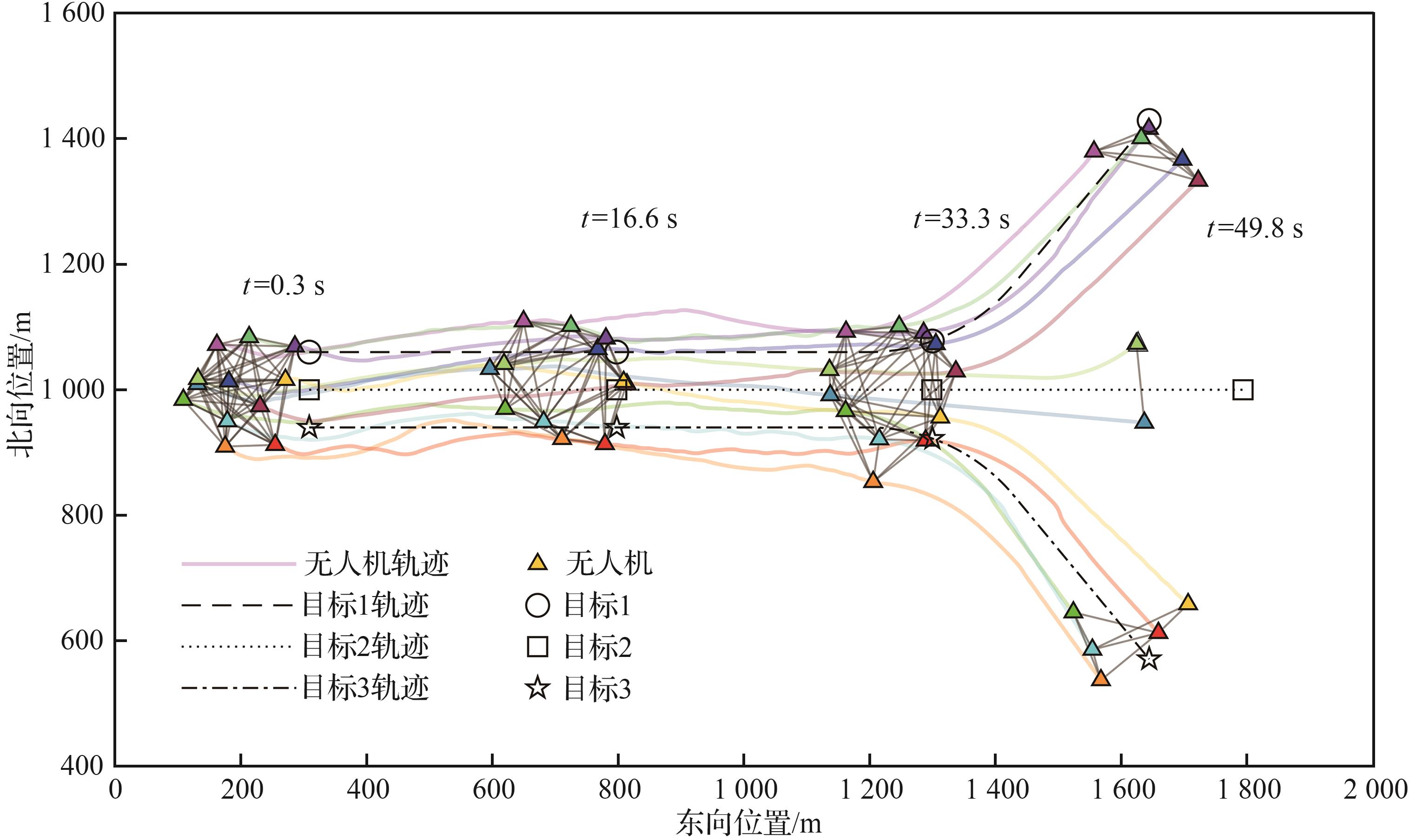

Fig.14
Swarm grouping state
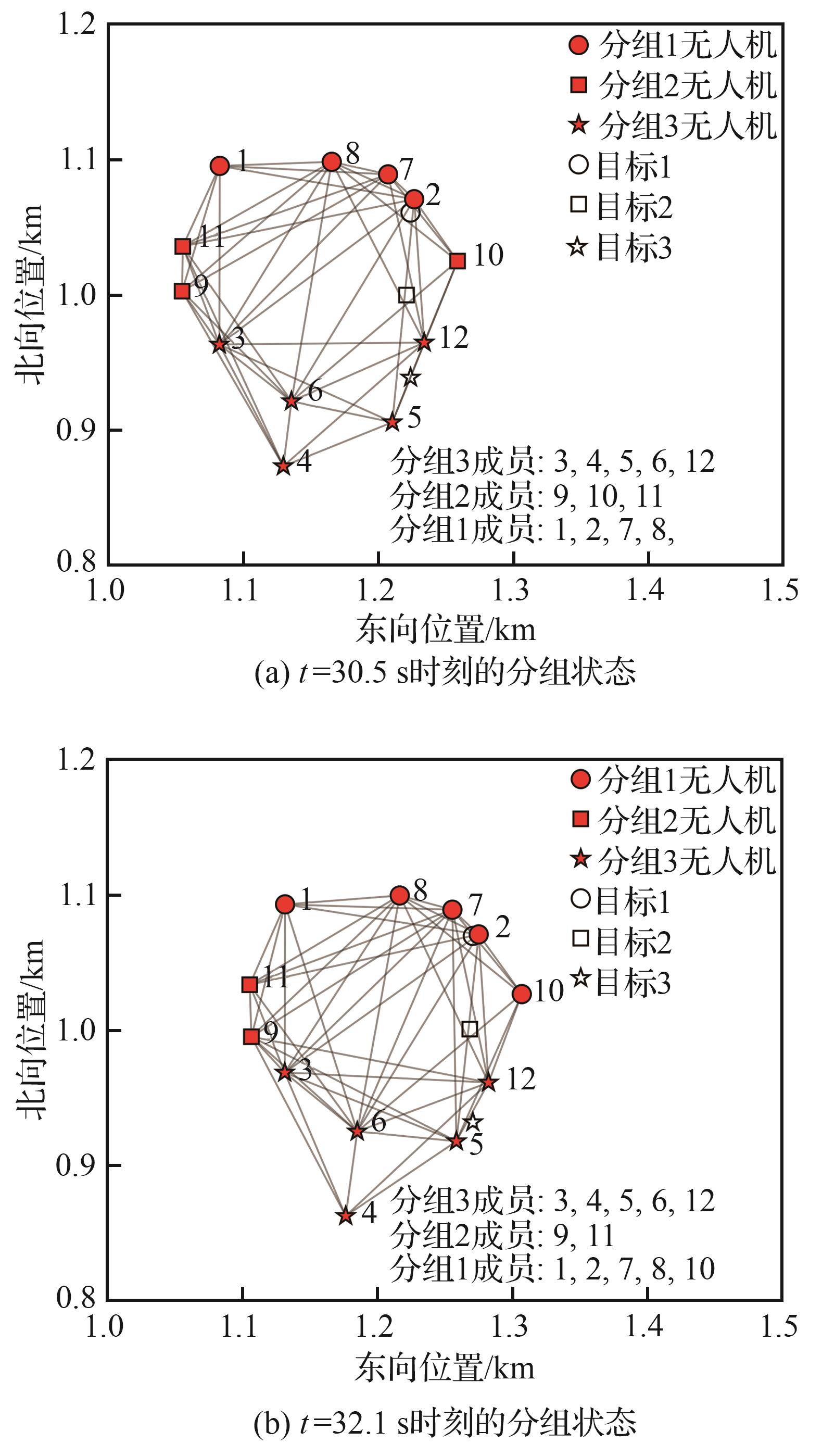

Fig.15
Curves of velocity and control variables of each UAV

Fig.16
Performance indices curves of consensus decision-making method
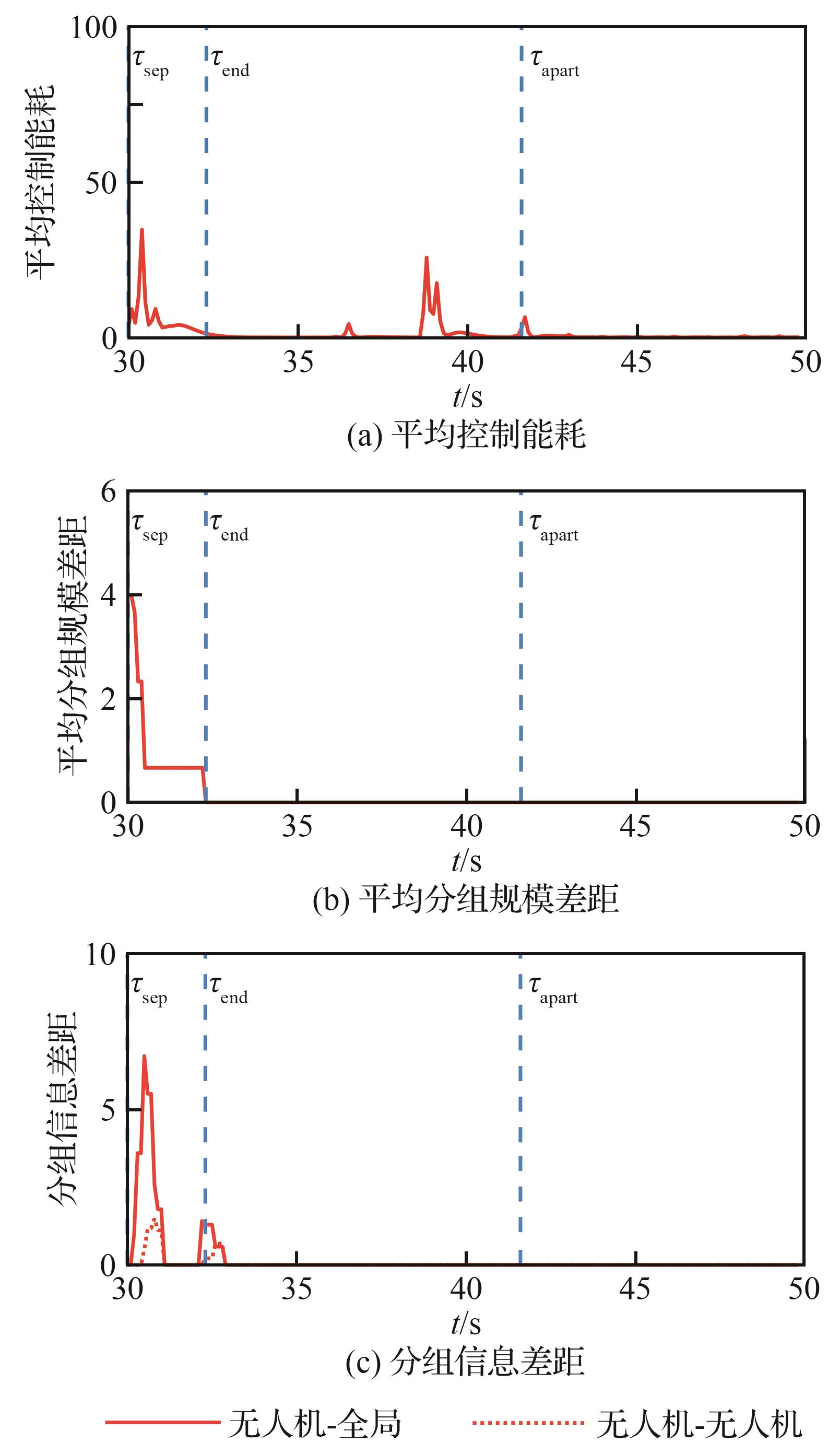
Table 4
Target path parameters
| 实验组 | 转弯角度 | 转弯半径 |
|---|---|---|
| 1 | 50 | 300 |
| 2 | 60 | 250 |
| 3 | 70 | 200 |
| 4 | 80 | 150 |
| 5 | 90 | 100 |

Fig.17
Performance indices curves under different target path parameters
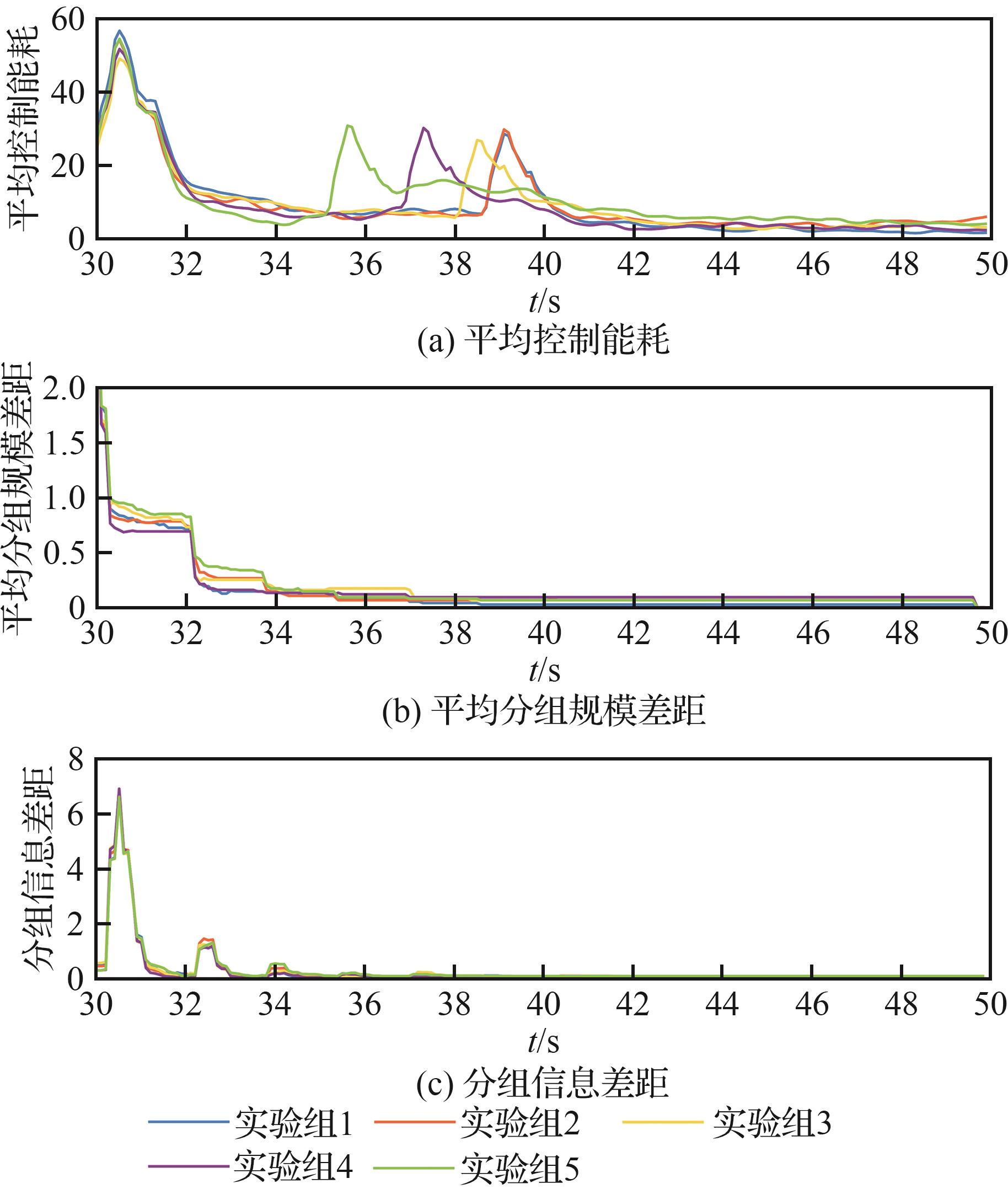
Table 5
Comparison of performance indices under different target path parameters (250 experiments)
| 实验组 | 路径代价/m | 时间代价/s | 集群分组能耗 | 分组信息不一致程度 | 目标信息不一致程度 | 无差率 |
|---|---|---|---|---|---|---|
| 1 | 94.39 | 2.84 | 189.68 | 0.44 | 19.40 | 0.96 |
| 2 | 92.63 | 2.79 | 191.17 | 0.45 | 18.29 | 0.90 |
| 3 | 97.67 | 2.96 | 194.70 | 0.49 | 22.30 | 0.90 |
| 4 | 83.89 | 2.52 | 185.82 | 0.49 | 23.77 | 0.90 |
| 5 | 109.17 | 3.33 | 221.01 | 0.60 | 34.86 | 0.90 |

Fig.18
Influence of communication distance on performance indices of consensus decision-making
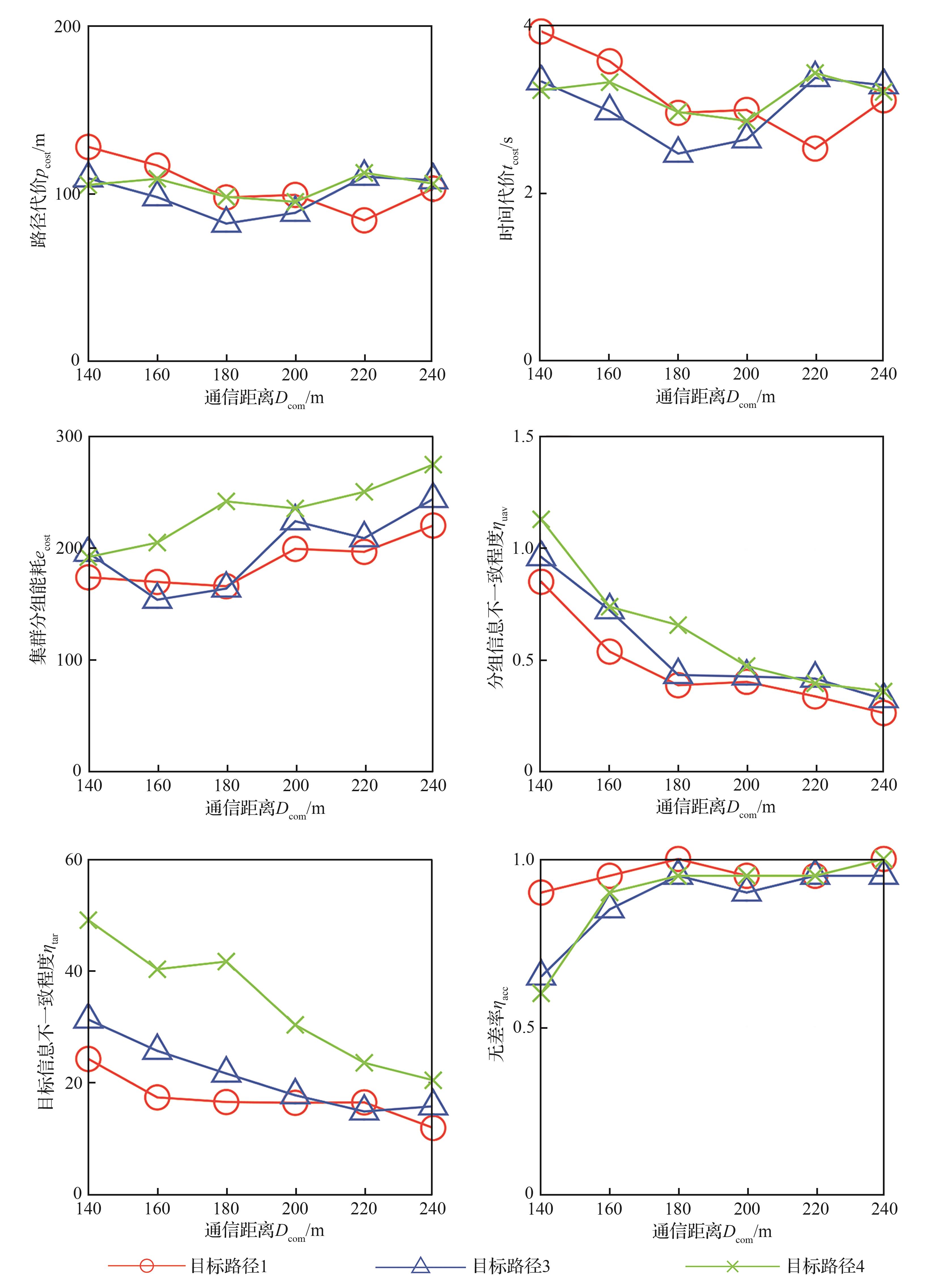

Fig.19
Influence of communication delay on performance indices of consensus decision-making
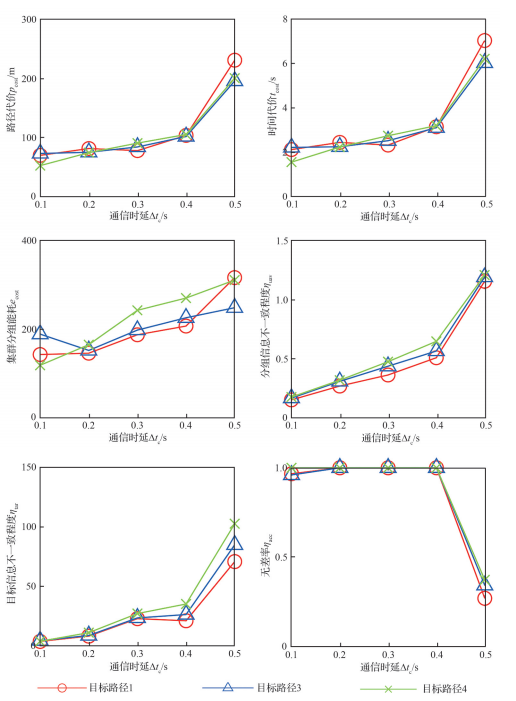

Fig.20
Influence of consensus decision-making period on performance indices of consensus decision-making
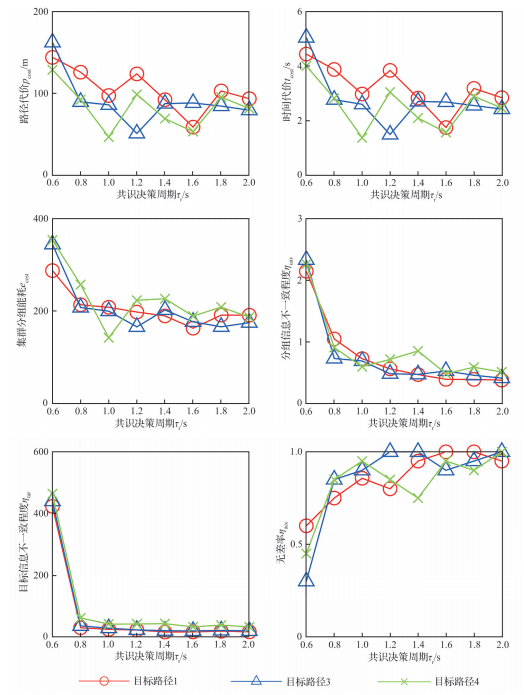

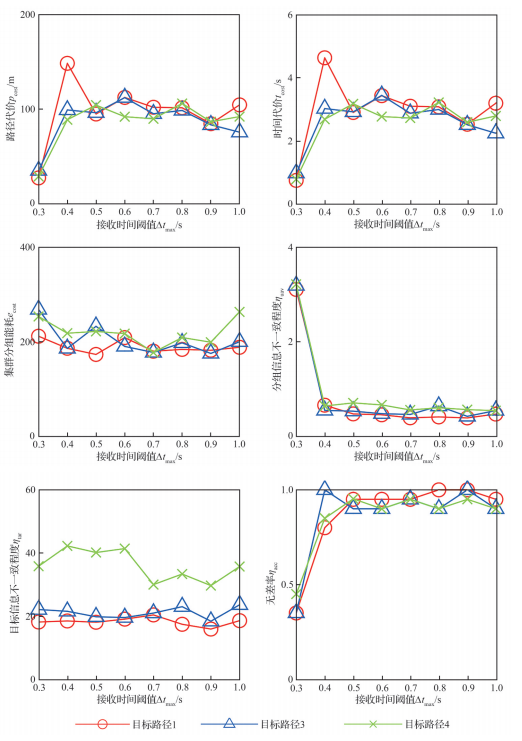
Fig.21
Influence of receiving time threshold on performance indices of consensus decision-making
| [1] | LI X Q, LU X P, CHEN W H, et al. Research on UAVs reconnaissance task allocation method based on communication preservation[J]. IEEE Transactions on Consumer Electronics, 2024, 70(1): 684-695. |
| [2] | HE C, DONG Y R, WANG Z J. Radio map assisted multi-UAV target searching[J]. IEEE Transactions on Wireless Communications, 2023, 22(7): 4698-4711. |
| [3] | LEI T J, LUO C M, SELLERS T, et al. Multitask allocation framework with spatial dislocation collision avoidance for multiple aerial robots[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(6): 5129-5140. |
| [4] | SUN L, WANG J S, WANG J, et al. Efficient joint deployment of multi-UAVs for target tracking in traffic big data[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(7): 7780-7791. |
| [5] | CHANG Z, DENG H W, YOU L, et al. Trajectory design and resource allocation for multi-UAV networks: Deep reinforcement learning approaches[J]. IEEE Transactions on Network Science and Engineering, 2023, 10(5): 2940-2951. |
| [6] | TONG B D, DUAN H B. A game theory-based approach for multiple UAVs cooperative target defense[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2024, 71(4): 2149-2153. |
| [7] | 闫耀芳, 张子林, 钱堂, 等. 无人机目标追踪系统设计与实现[J]. 山西电子技术, 2022(5): 18-20. |
| YAN Y F, ZHANG Z L, QIAN T, et al. Design and implementation of UAV target tracking system[J]. Shanxi Electronic Technology, 2022(5): 18-20 (in Chinese). | |
| [8] | WANG Y, LI H G, LI X J, et al. UAV image target localization method based on outlier filter and frame buffer[J]. Chinese Journal of Aeronautics, 2024, 37(7): 375-390. |
| [9] | 田磊, 赵启伦, 董希旺, 等. 异构多智能体系统分组输出时变编队跟踪控制[J]. 航空学报, 2020, 41(7): 323727. |
| TIAN L, ZHAO Q L, DONG X W, et al. Time-varying output group formation tracking for heterogeneous multi-agent systems[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(7): 323727 (in Chinese). | |
| [10] | 张毅, 于浩, 杨秀霞, 等. 无人机集群分组编队自适应跟踪-包含控制[J]. 北京航空航天大学学报, 2024, 50(1): 97-109. |
| ZHANG Y, YU H, YANG X X, et al. Adaptive group formation tracking-containment control for UAV swarm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(1): 97-109 (in Chinese). | |
| [11] | HU J Y, BHOWMICK P, LANZON A. Distributed adaptive time-varying group formation tracking for multiagent systems with multiple leaders on directed graphs[J]. IEEE Transactions on Control of Network Systems, 2020, 7(1): 140-150. |
| [12] | JIA J B, CHEN X, WANG W Z, et al. Cooperative control of multi-UAV for multi-targets encirclement and tracking based on potential game[C]∥2023 42nd Chinese Control Conference (CCC). Piscataway: IEEE Press, 2023: 3778-3785. |
| [13] | PENG Q, WU H S, XUE R S. Review of dynamic task allocation methods for UAV swarms oriented to ground targets[J]. Complex System Modeling and Simulation, 2021, 1(3): 163-175. |
| [14] | ZHAO D, YU X H, WEN G H, et al. Dynamic task allocation algorithm for moving targets interception[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(2): 776-788. |
| [15] | HAO N, YI H, TIAN C G, et al. A distributed-centralized dynamic task allocation algorithm for UAVs tracking moving targets[C]∥2021 40th Chinese Control Conference (CCC). Piscataway: IEEE Press, 2021: 3774-3779. |
| [16] | HU C F, QU G, ZHANG Y T. Pigeon-inspired fuzzy multi-objective task allocation of unmanned aerial vehicles for multi-target tracking[J]. Applied Soft Computing, 2022, 126: 109310. |
| [17] | XIANG L H, WANG F Y, XU W J, et al. Dynamic UAV swarm collaboration for multi-targets tracking under malicious jamming: Joint power, path and target association optimization[J]. IEEE Transactions on Vehicular Technology, 2024, 73(4): 5410-5425. |
| [18] | 陈梓豪, 胡春鹤. 基于DQN出价策略的多无人机目标分配拍卖算法[J]. 聊城大学学报(自然科学版), 2024, 37(4): 23-32. |
| CHEN Z H, HU C H. Multi drones target allocation auction algorithm based on DQN bidding strategy[J]. Journal of Liaocheng University (Natural Science Edition), 2024, 37(4): 23-32 (in Chinese). | |
| [19] | HAI X S, QIU H X, WEN C Y, et al. A novel distributed situation awareness consensus approach for UAV swarm systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(12): 14706-14717. |
| [20] | CHOI H L, BRUNET L, HOW J P. Consensus-based decentralized auctions for robust task allocation[J]. IEEE Transactions on Robotics, 2009, 25(4): 912-926. |
| [21] | 郑习羽, 徐梓毓, 王京华. 基于聚类分组的异构多机器人任务分配算法研究[J]. 航空兵器, 2022, 29(4): 100-109. |
| ZHENG X Y. XU Z Y, WANG J H. Research on task allocation of heterogeneous multi-robot based on cluster grouping algorithm[J]. Aero Weaponry, 2022, 29(4): 100-109 (in Chinese). | |
| [22] | WU W N, XU J, SUN Y M. Integrate assignment of multiple heterogeneous unmanned aerial vehicles performing dynamic disaster inspection and validation task with dubins path[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 4018-4032. |
| [23] | ZITOUNI F, HAROUS S, MAAMRI R. A distributed approach to the multi-robot task allocation problem using the consensus-based bundle algorithm and ant colony system[J]. IEEE Access, 2020, 8: 27479-27494. |
| [24] | WANG W F, RU L, LU B, et al. Multi-task cooperative assignment of two-stage heterogeneous multi-UAV based on improved CBBA[C]∥2023 3rd International Symposium on Computer Technology and Information Science (ISCTIS). Piscataway: IEEE Press, 2023: 173-178. |
| [25] | MERCKER T, CASBEER D W, MILLET P T, et al. An extension of consensus-based auction algorithms for decentralized, time-constrained task assignment[C]∥Proceedings of the 2010 American Control Conference. Piscataway: IEEE Press, 2010: 6324-6329. |
| [1] | Yiquan WU, Kang TONG. Research advances on deep learning-based small object detection in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 30848-030848. |
| [2] | Fang LIU, Chenyang LU, Yan LU, Xin WANG. Adaptive template update-based Transformer algorithm for UAV target tracking [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331687-331687. |
| [3] | Haijun ZHANG, Qingyue XIA, Xu MA, Chao REN, Yang LU. A review of unmanned aerial vehicles deployment optimization in 6G low-altitude communication scenarios [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531296-531296. |
| [4] | Wenxiao HU, Di MU, Zhi LI, Yingyi GUO, Xinmin CHEN. Key technical issues and innovation strategies for development of low-altitude economy [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531539-531539. |
| [5] | Xudong LUO, Yiquan WU, Jinlin CHEN. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 28822-028822. |
| [6] | Gaojie ZHENG, Xiaoming HE, Dongpo LI, Huijun TAN, Kun WANG, Zhenlong WU, Depeng WANG. Double 90° deflection inlet/volute coupling flow characteristics of tail-powered unmanned aerial vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 128782-128782. |
| [7] | Jiang ZHAO, Xuan ZHANG, Pei CHI, Yingxun WANG. Self⁃adaptive formation control and dynamic path planning for air⁃ground heterogeneous swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 329809-329809. |
| [8] | Zhaochen CHU, Tao SONG, Ren JIN, Defu LIN. Vision-based air-to-air multi-UAVs tracking [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 629379-629379. |
| [9] | Kunda LIU, Xueming LIU, Bo ZHU, Qingrui ZHANG. Robust safe control for multi⁃UAV formation flight through narrow corridors [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729768-729768. |
| [10] | Wei LI, Yan GUO, Ning LI, Cuntao LIU, Hao YUAN. Intelligent reflector surface assisted UAV mobile edge computing task data maximization method [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 328486-328486. |
| [11] | LI Hui, LONG Teng, SUN Jingliang, XU Guangtong. Adaptive line-of-sight method for 3D path following of UAVs [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 326105-326105. |
| [12] | ZHANG Zhouyu, CAO Yunfeng, FAN Yanming. Research progress of vision based aerospace conflict sensing technologies for small unmanned aerial vehicle in low altitude [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 25645-025645. |
| [13] | LIU Fang, SUN Yanan. UAV target tracking algorithm based on adaptive fusion network [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(7): 325522-325522. |
| [14] | GAO Ming, YU Weichen, WANG Shanshan, WANG Rongchuang, SHI Jianjiang. Multidimensional coupled modeling for solar powered UAV energy system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(7): 224461-224461. |
| [15] | HU Xinting, WU Yu. Risk-based discrete multi-path planning method for UAVs in urban environments [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(6): 324383-324383. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341