Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (13): 532162.doi: 10.7527/S1000-6893.2025.32162
• Articles • Previous Articles
Jiaxing WANG( ), Hao CHEN, Zheng SHAO, Yang ZHANG
), Hao CHEN, Zheng SHAO, Yang ZHANG
Received:2025-04-25
Revised:2025-05-15
Accepted:2025-05-28
Online:2025-06-16
Published:2025-06-13
Contact:
Jiaxing WANG
E-mail:wang_jx0101@163.com
CLC Number:
Jiaxing WANG, Hao CHEN, Zheng SHAO, Yang ZHANG. Direct lift landing control method based on flight path angle command[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 532162.
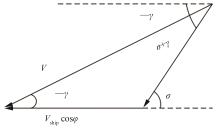
Fig.1
Flight path angle command calculation diagram
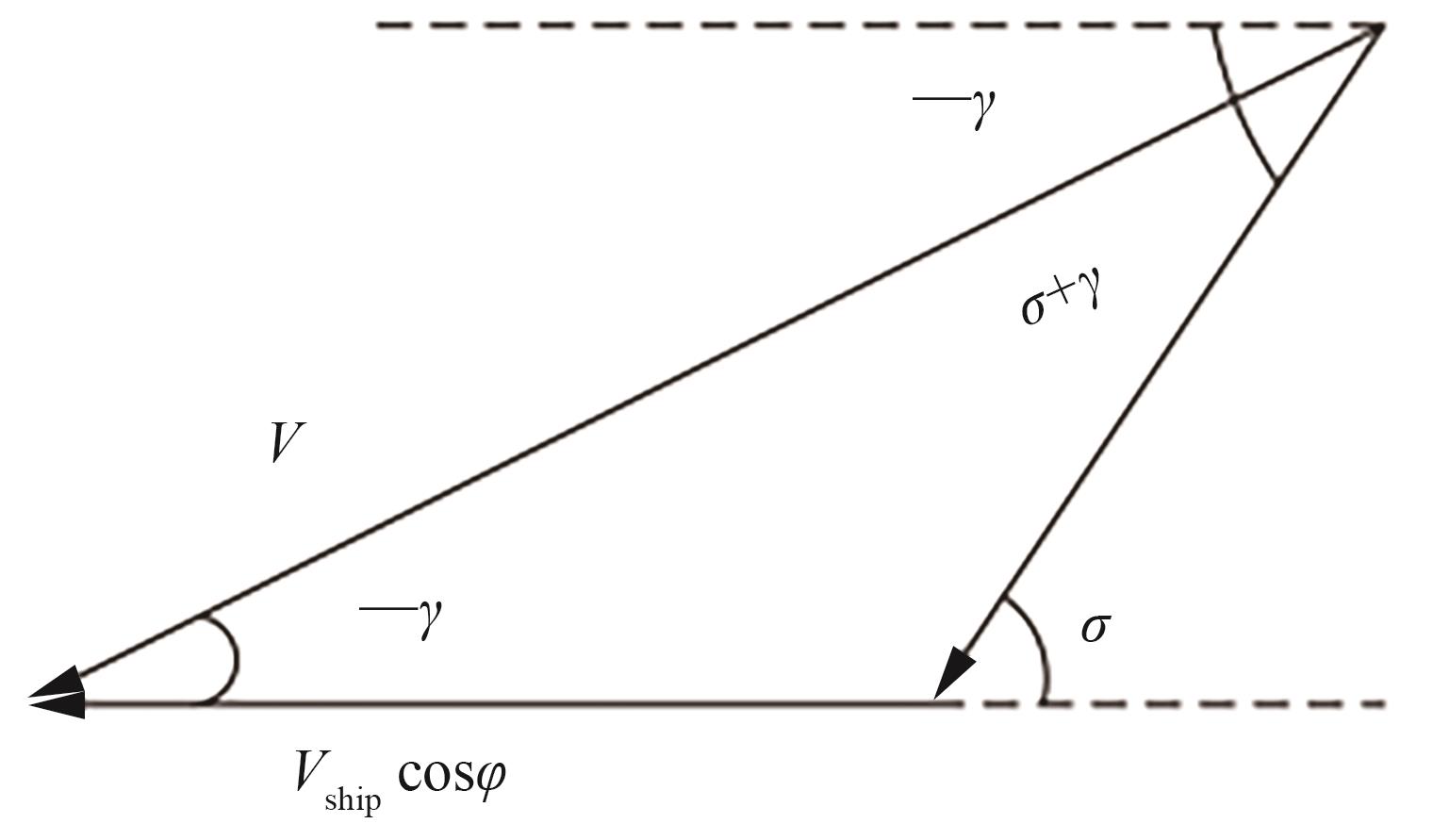
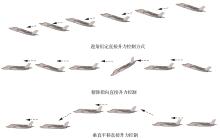
Fig.2
Direct lift control mode
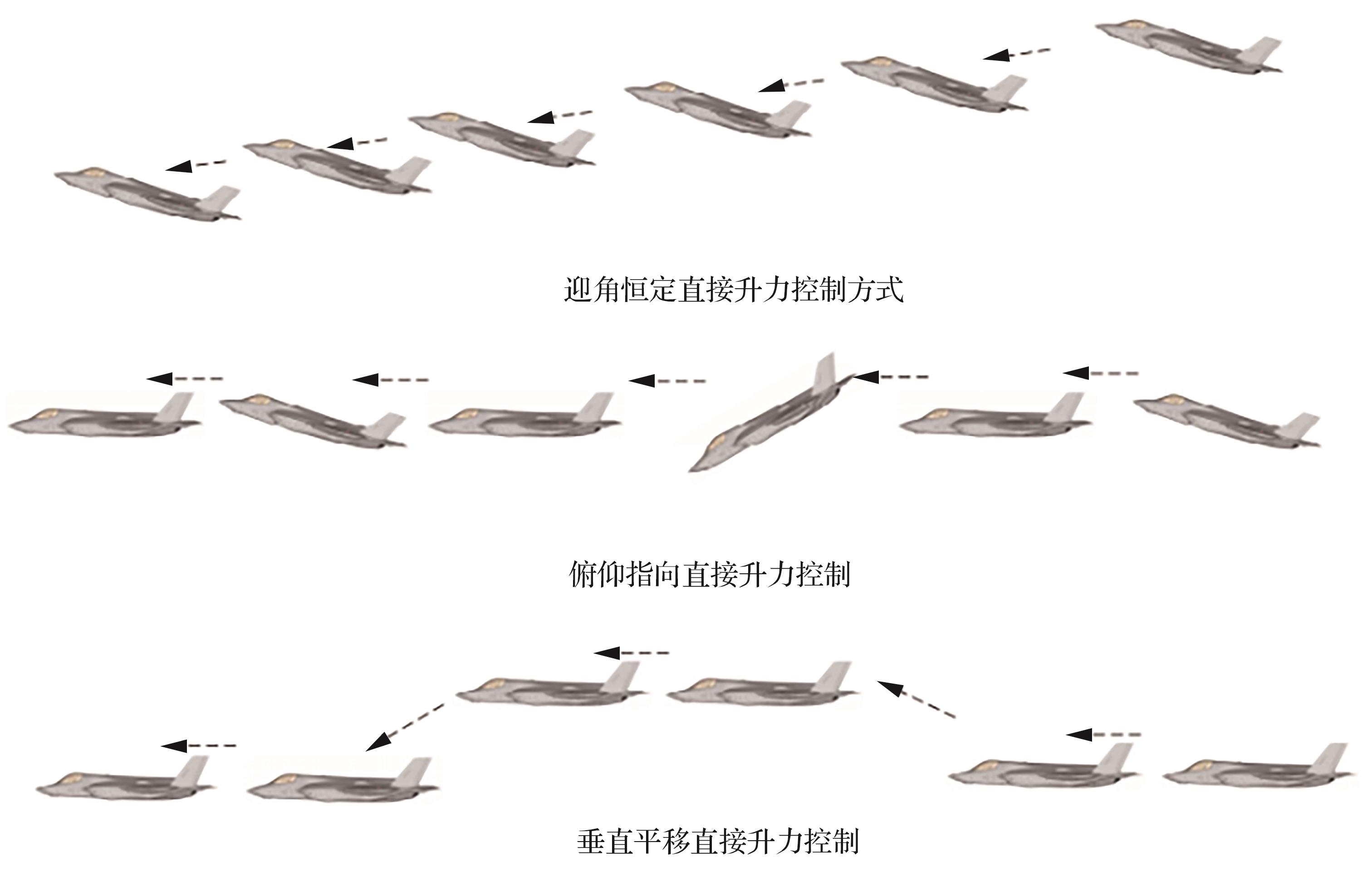
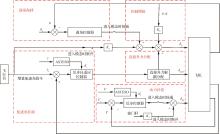
Fig.3
System control block diagram
Table 1
Control system parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 30 | -15 | ||
| 0.4 | -1 | ||
| 0.4 | 1 | ||
| 0.3 | 100 |
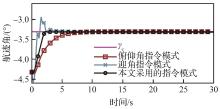
Fig.4
Flight path angle control curves under different control modes
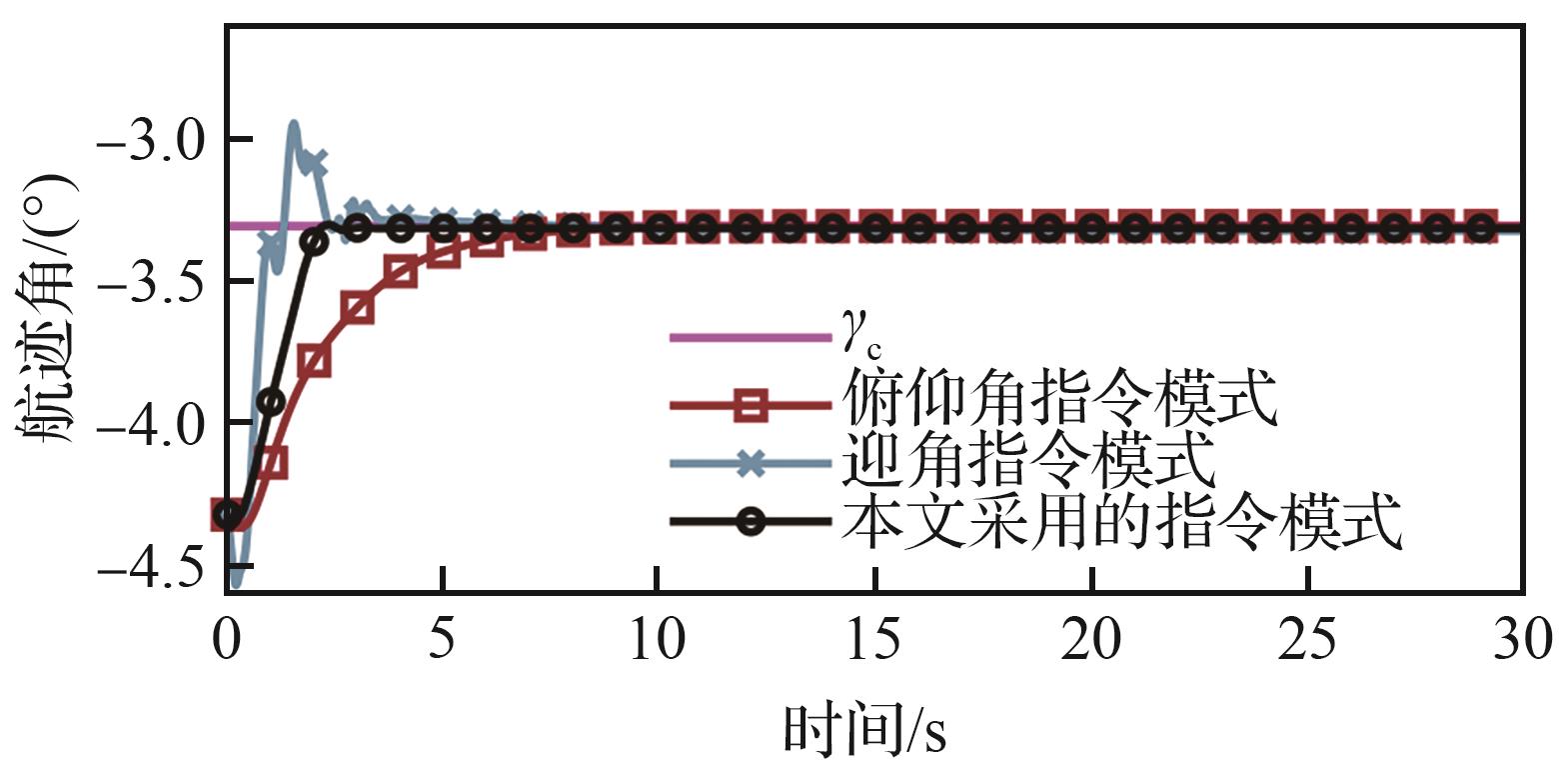
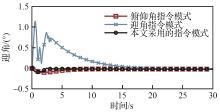
Fig.5
Angle of attack holding curves under different control modes
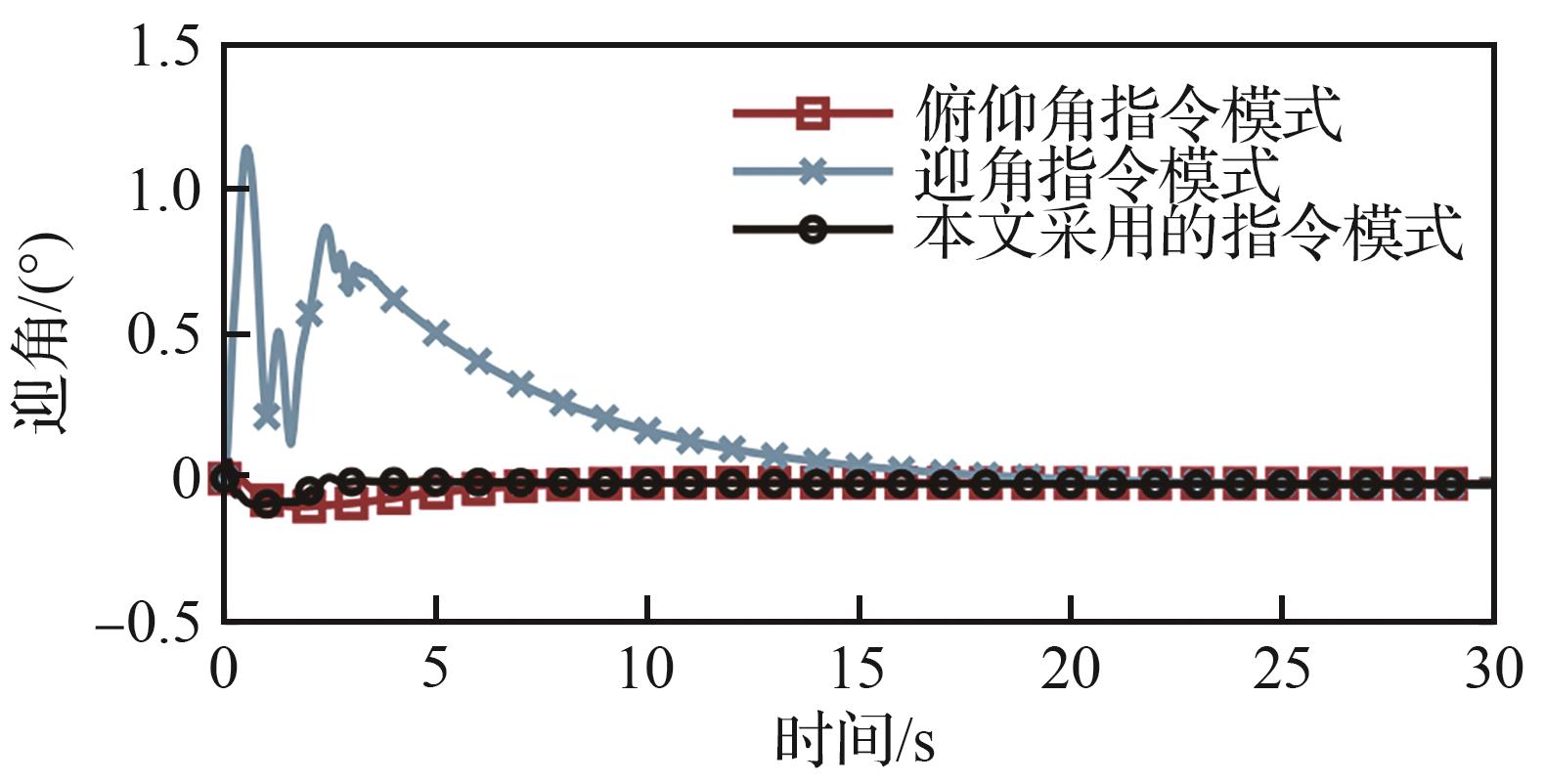
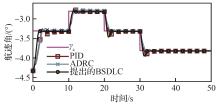
Fig.6
Flight path angle tracking curves under different control laws
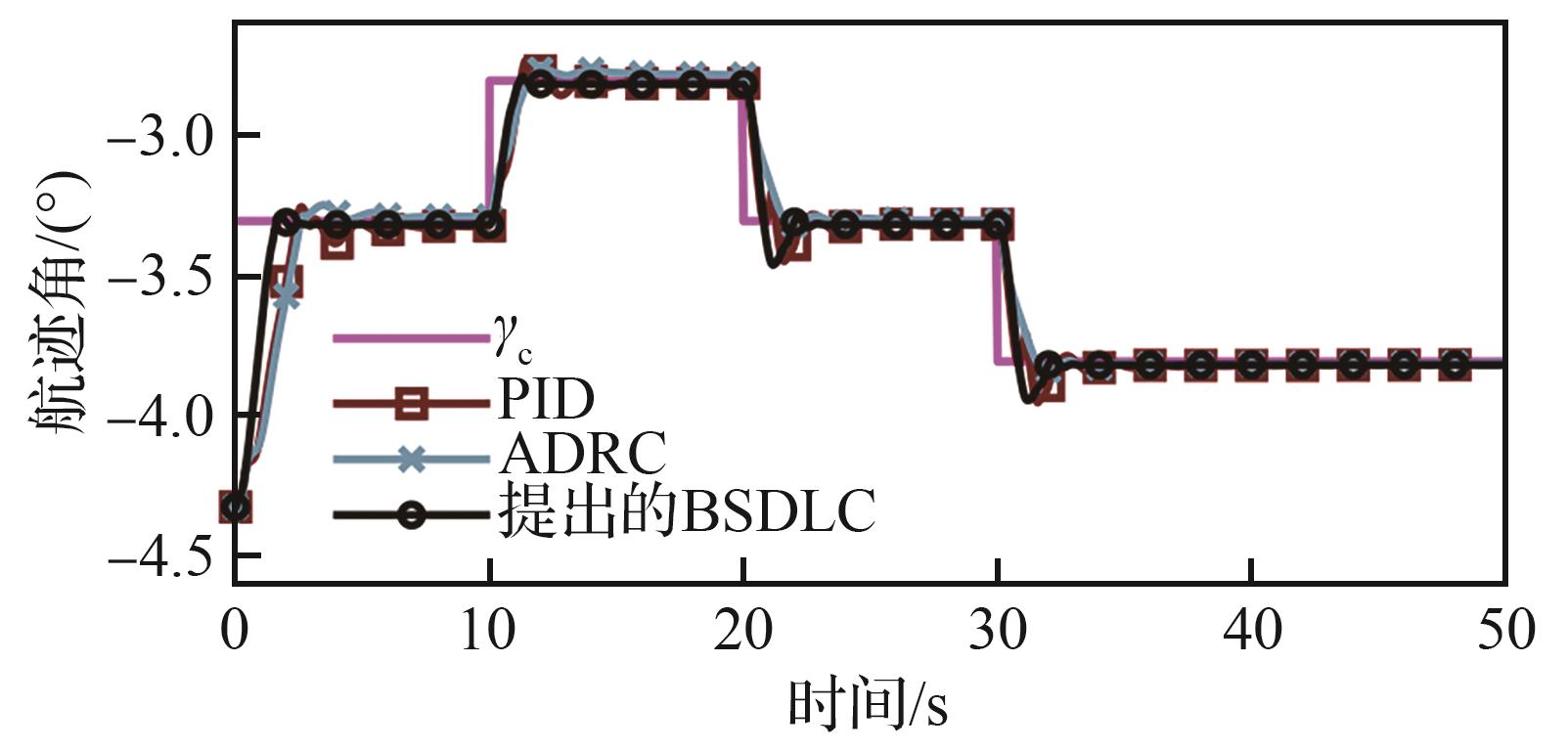

Fig.7
Angle of attack holding curves under different control laws
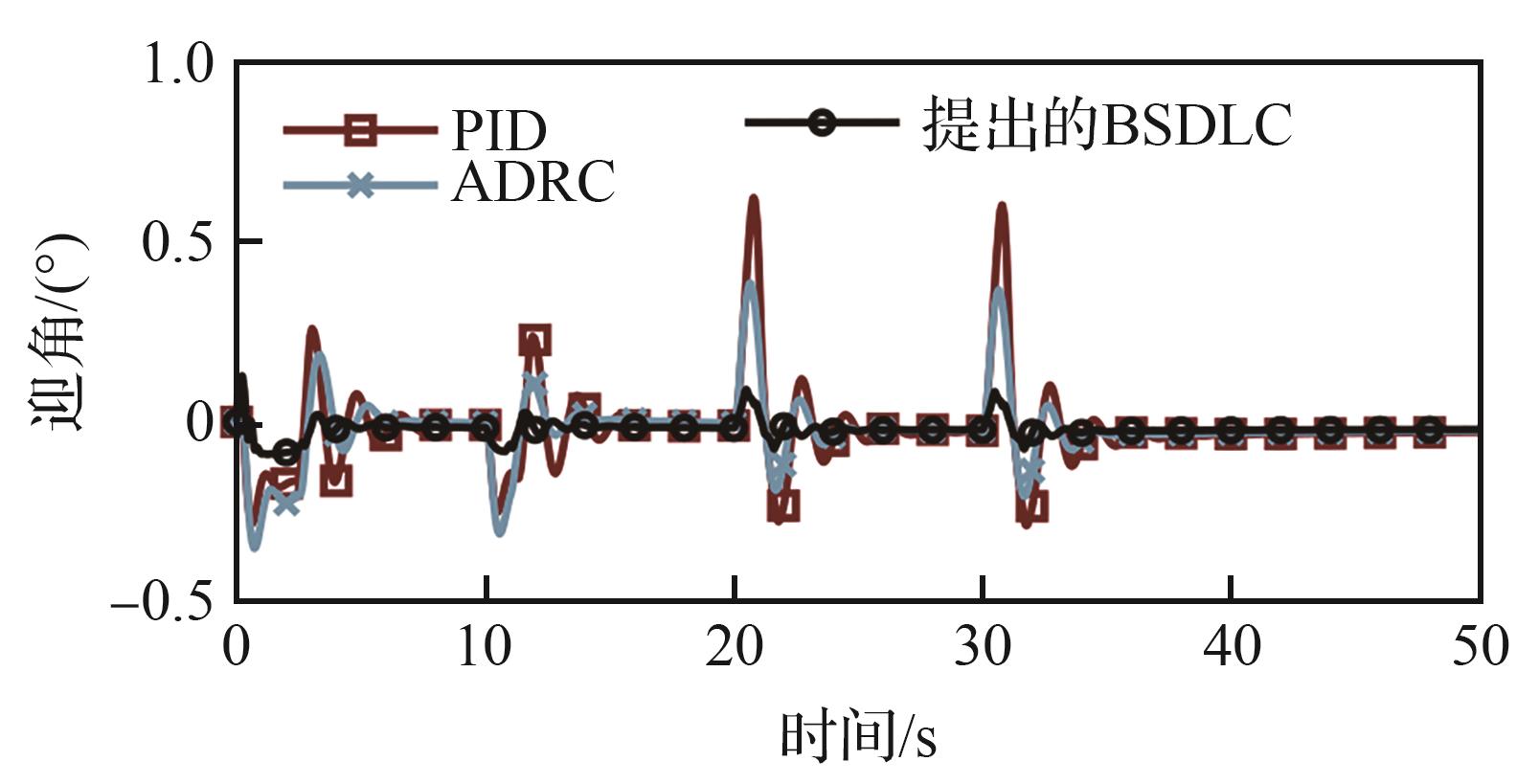

Fig.8
Speed holding curves under the same control law
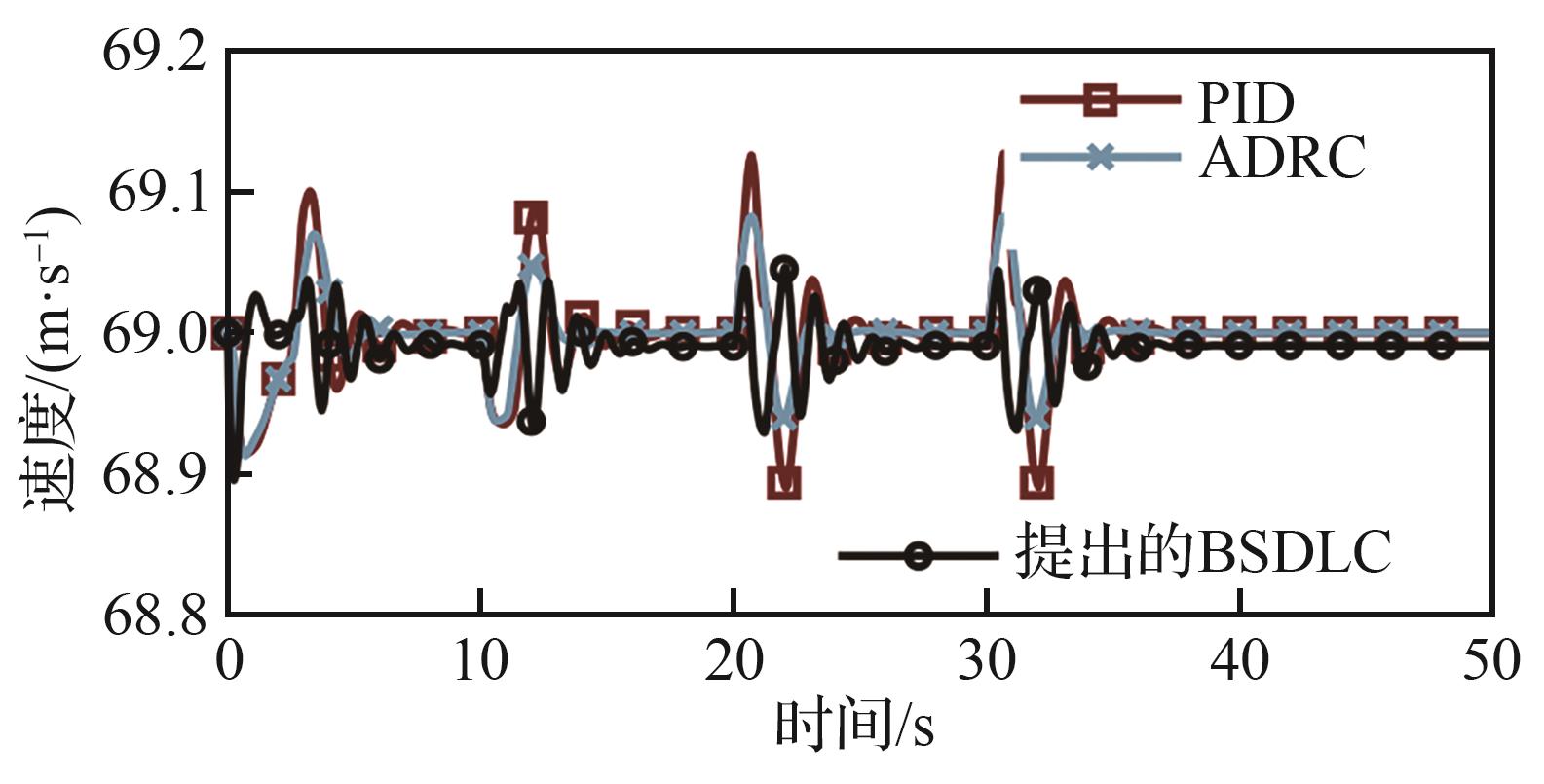

Fig.9
Flight path angle curves under carrier wake disturbance with different control laws
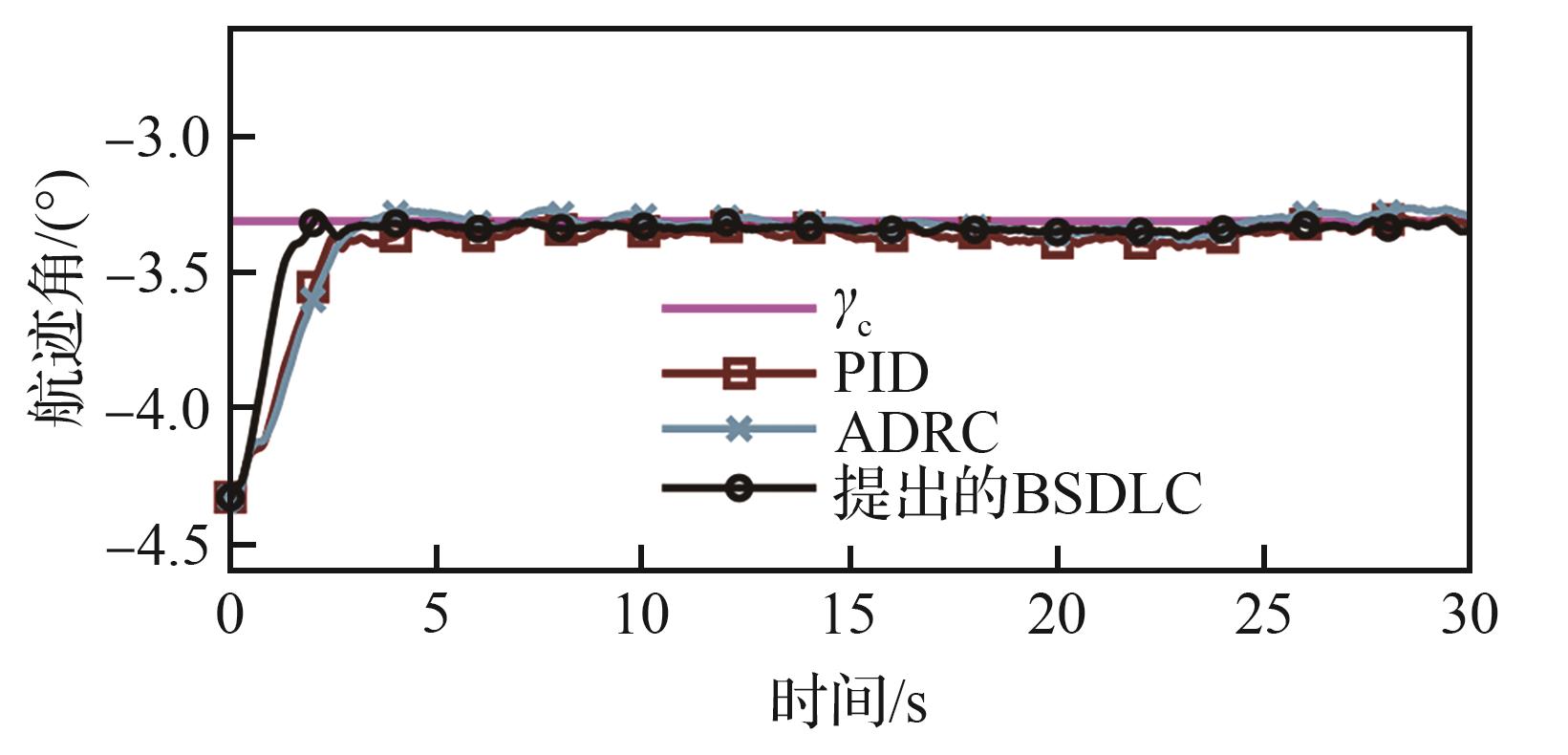
Fig.10
Angle of attack curves under carrier wake disturbance with different control laws
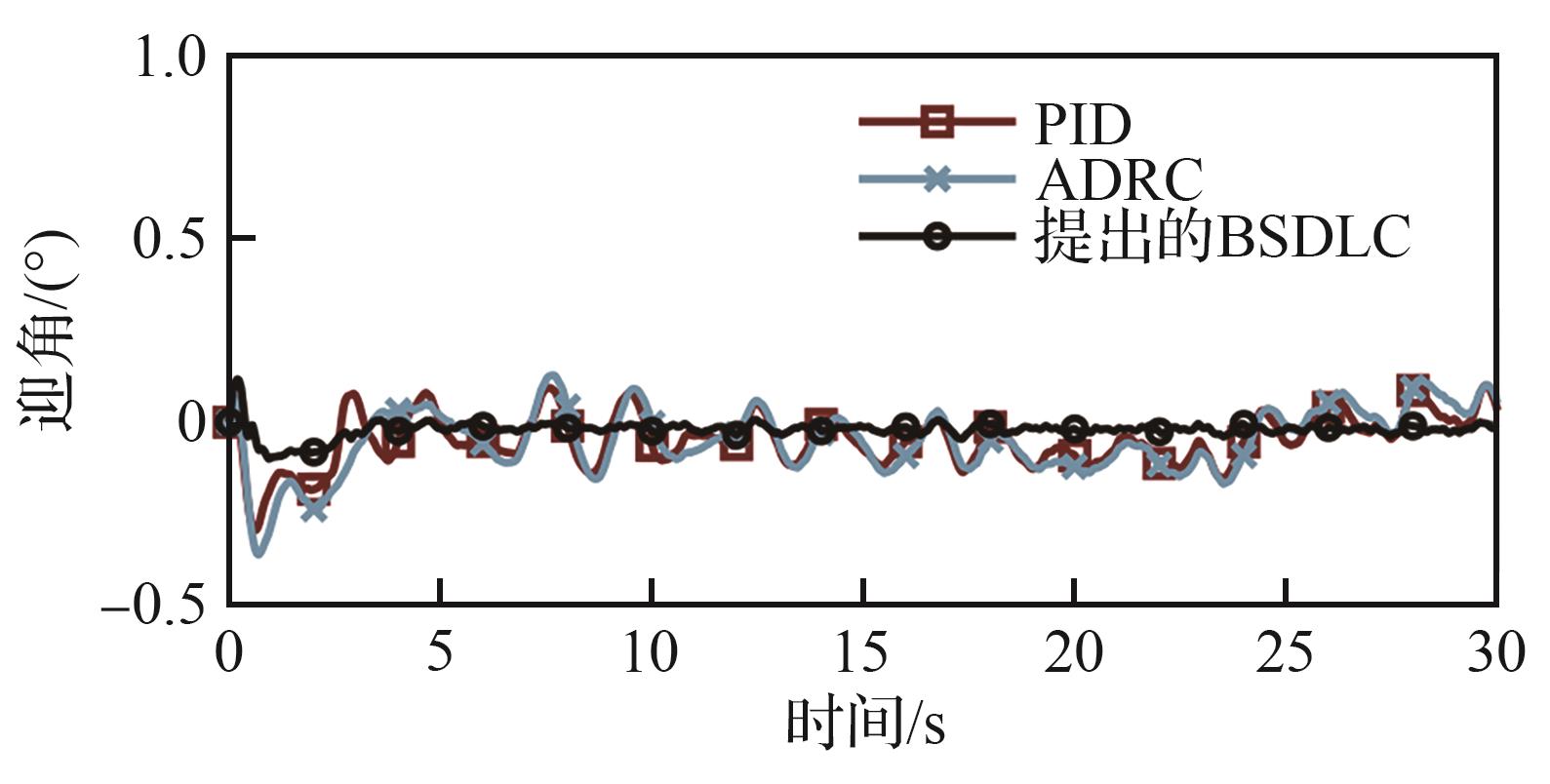
Fig.11
Speed curves under carrier wake disturbance with different control laws
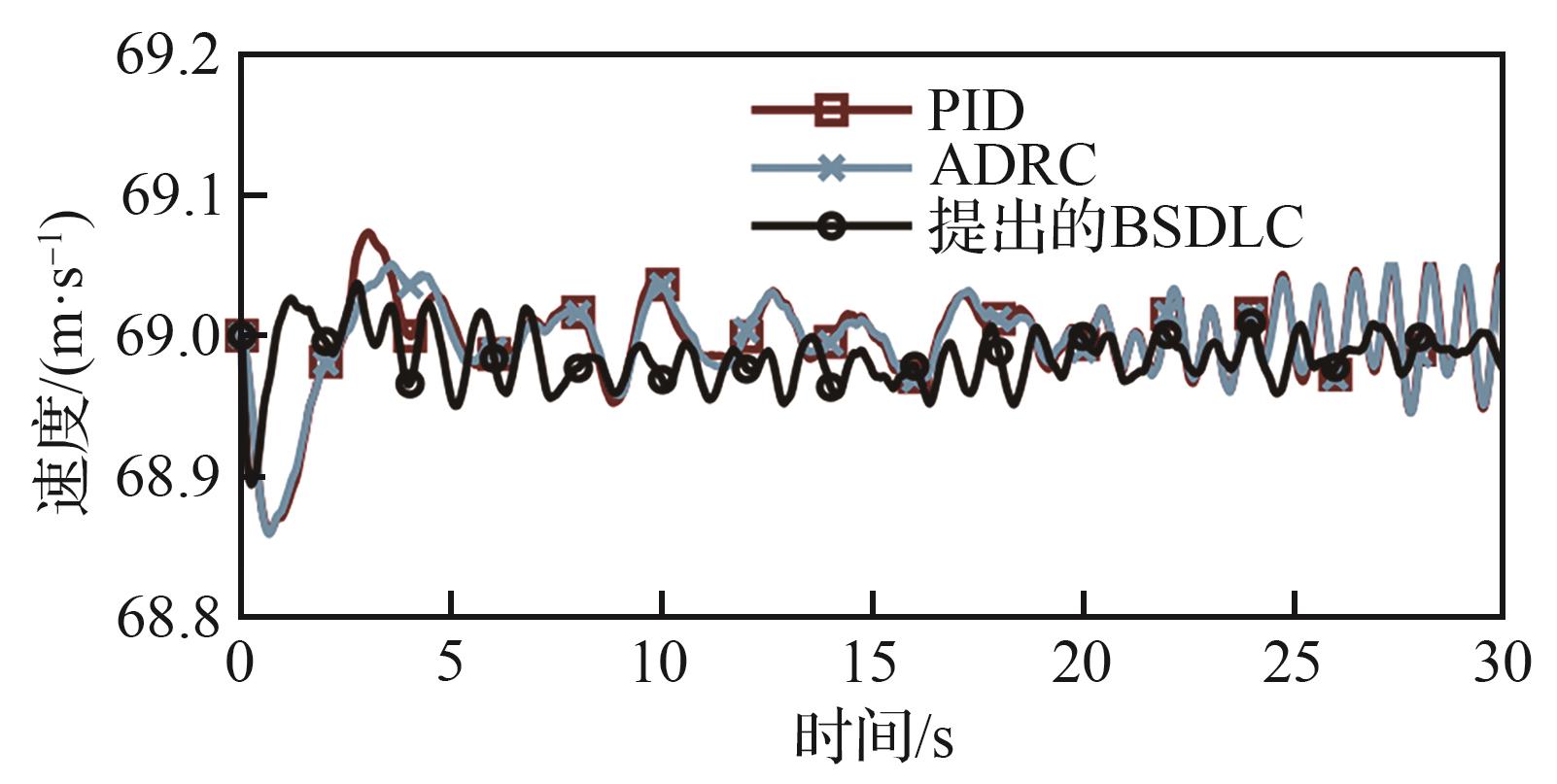
Table 2
Disturbance rejection performance statistics for three control strategies
| 平均误差/(°) | BSDLC | PID | ADRC |
|---|---|---|---|
| 轨迹角 | 0.022 4 | 0.044 9 | 0.024 8 |
| 迎角平 | 0.018 8 | 0.060 1 | 0.070 4 |
Table 3
Initial position of the simulation scenario
| 场景 | xship/m | Hcarrier/m | xcarrier/m |
|---|---|---|---|
| 1 | -500 | 100 | -2 000 |
| 2 | -500 | 120 | -2 000 |
| 3 | -500 | 80 | -1 800 |
| 4 | -500 | 90 | -1 800 |
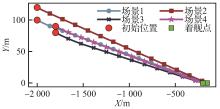
Fig.12
2D landing trajectories of carrier-based aircraft simulation
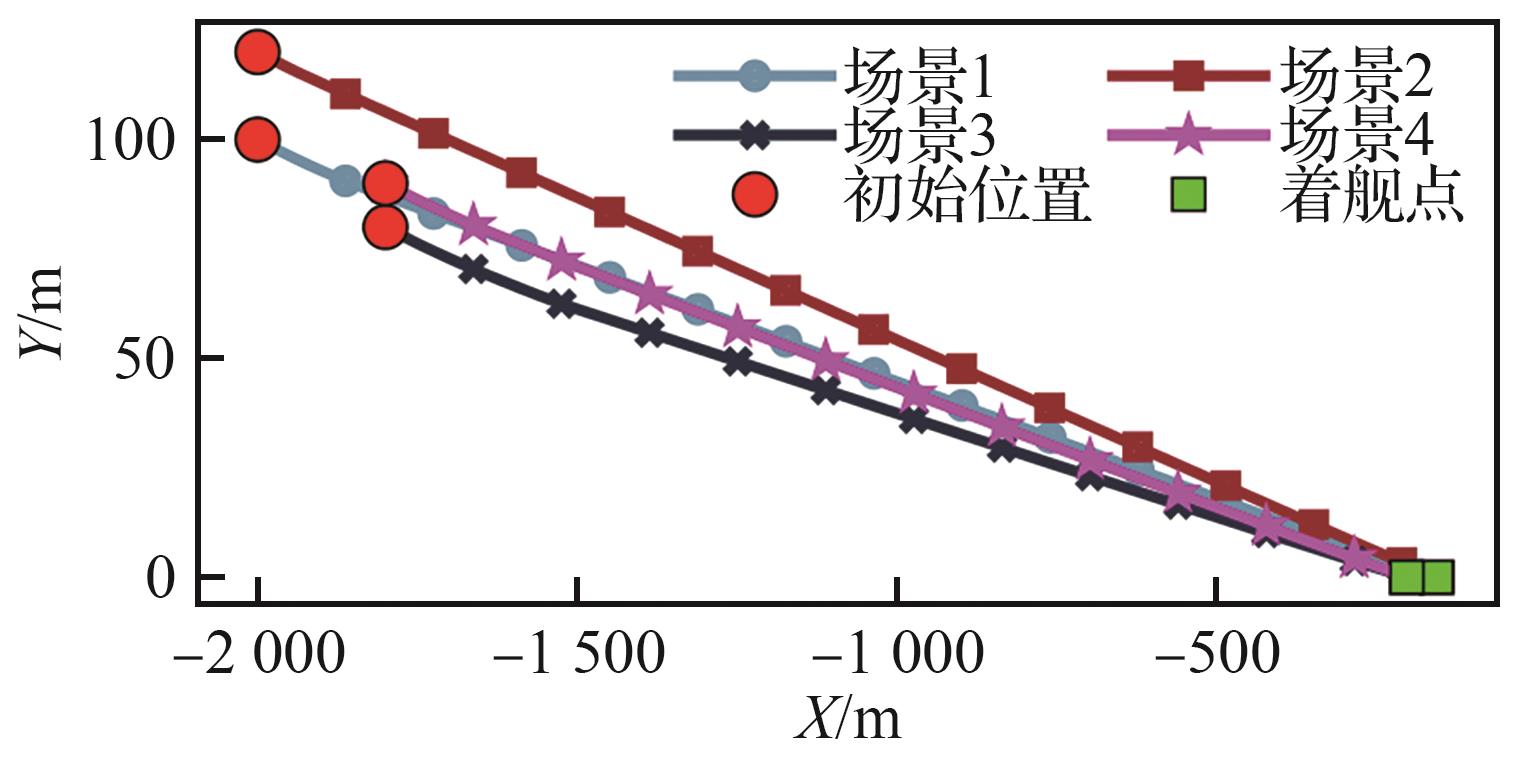
Fig.13
Flight path error curves
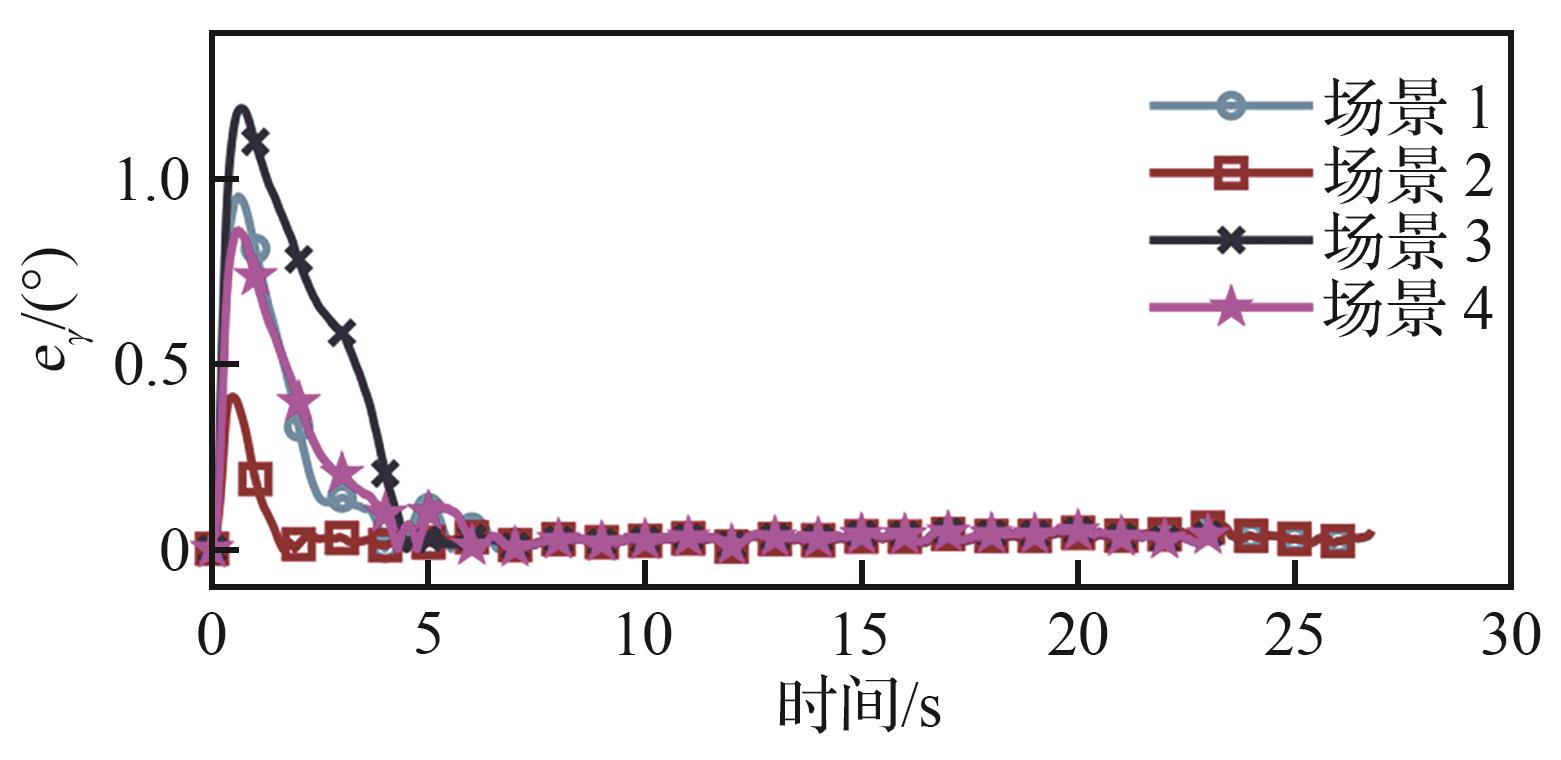
Table 4
Landing arrival time and longitudinal error under four scenarios
| 参数 | Case1 | Case2 | Case3 | Case4 |
|---|---|---|---|---|
| 抵达时间/s | 26.776 | 26.787 | 23.188 | 23.198 |
| 纵向误差/m | 0.392 0 | -0.385 2 | -0.498 3 | -0.445 0 |

Fig.14
γ、α、θ change curves under four scenarios
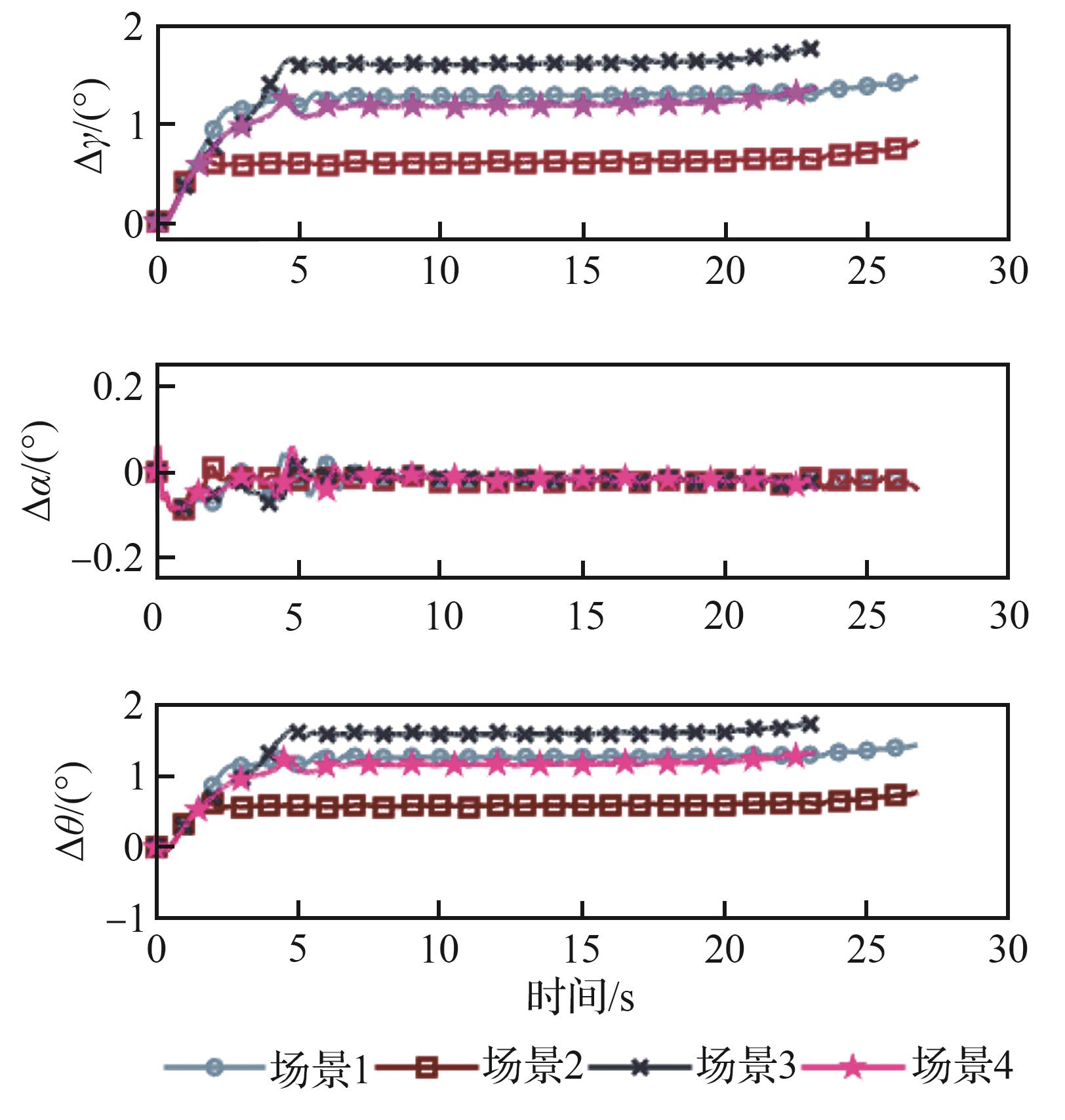

Fig.15
Velocity, pitch angle velocity and overload curves under four scenarios
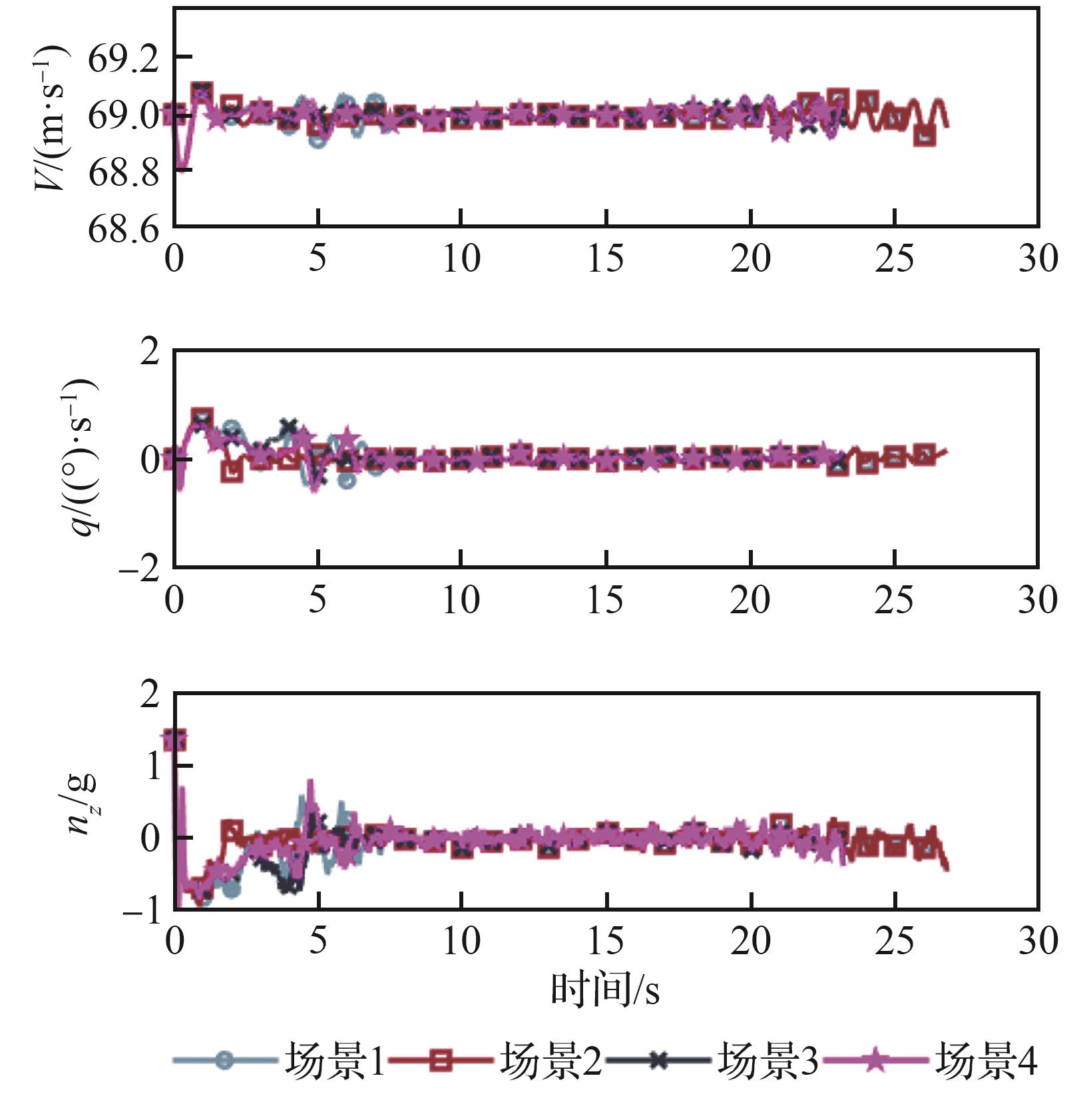
Fig.16
Control surface output curves for carrier-based aircraft landing simulation
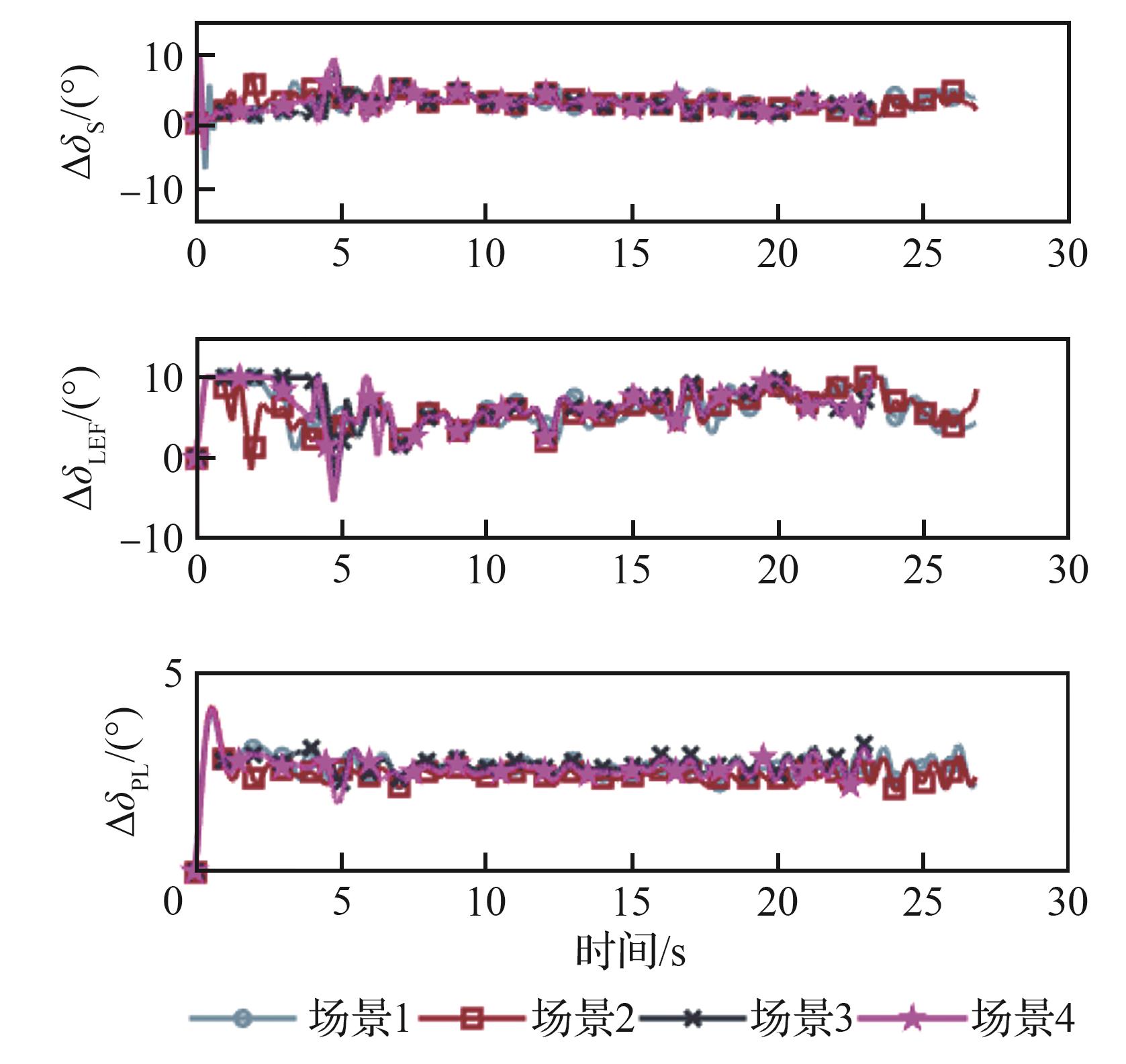
Fig.17
Estimated parametric curves
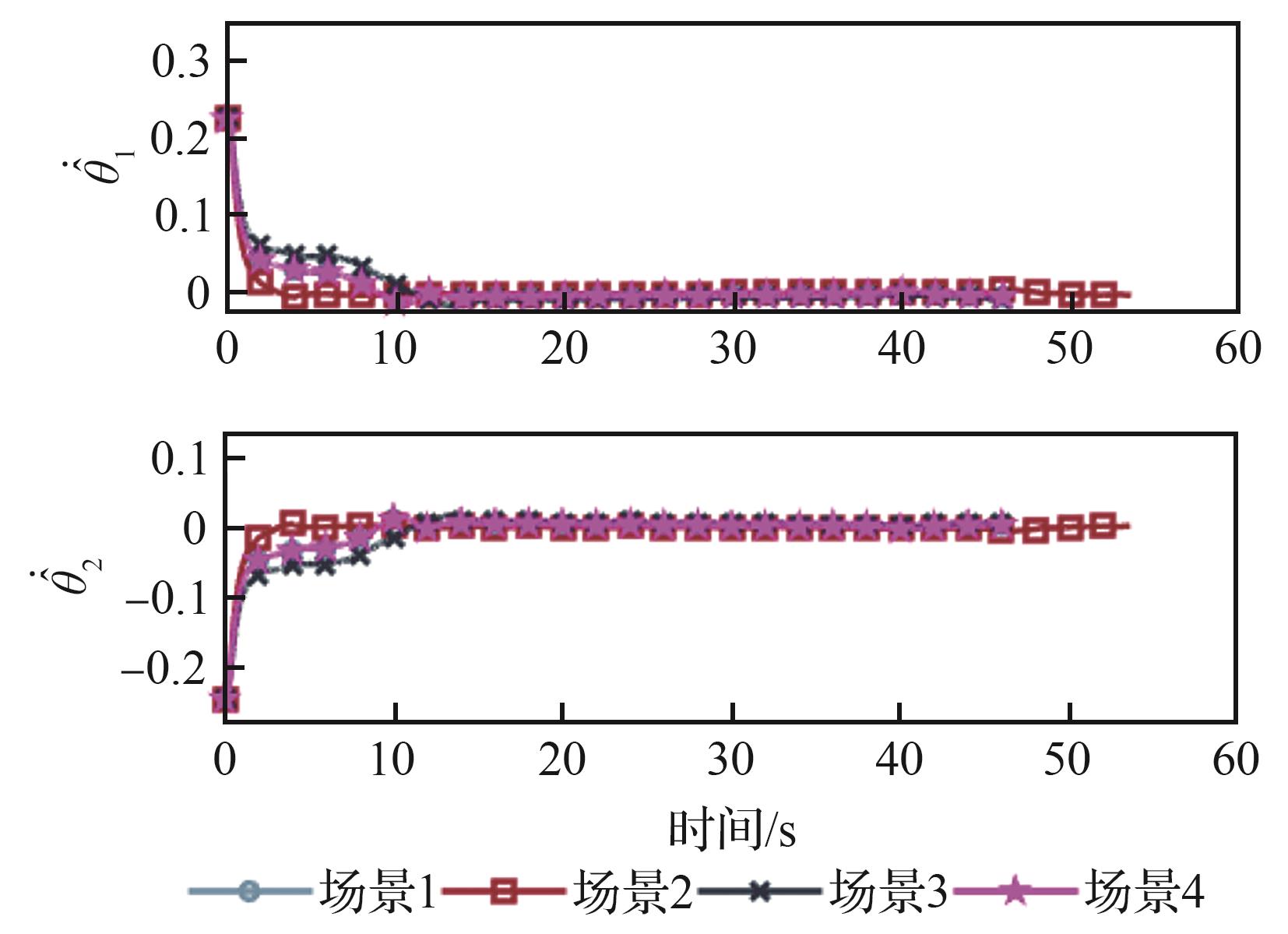
Table 5
Range of aerodynamic coefficient disturbances
| 气动系数 | 扰动范围/% |
|---|---|
| 升力系数 | ±20 |
| 阻力系数 | ±40 |
| 俯仰力矩系数 | ±40 |
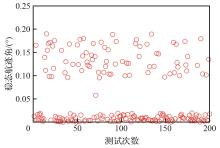
Fig.18
Scatter plot of steady-state flight path angle errors
Fig.19
Scatter plot of flight path angle response rise time
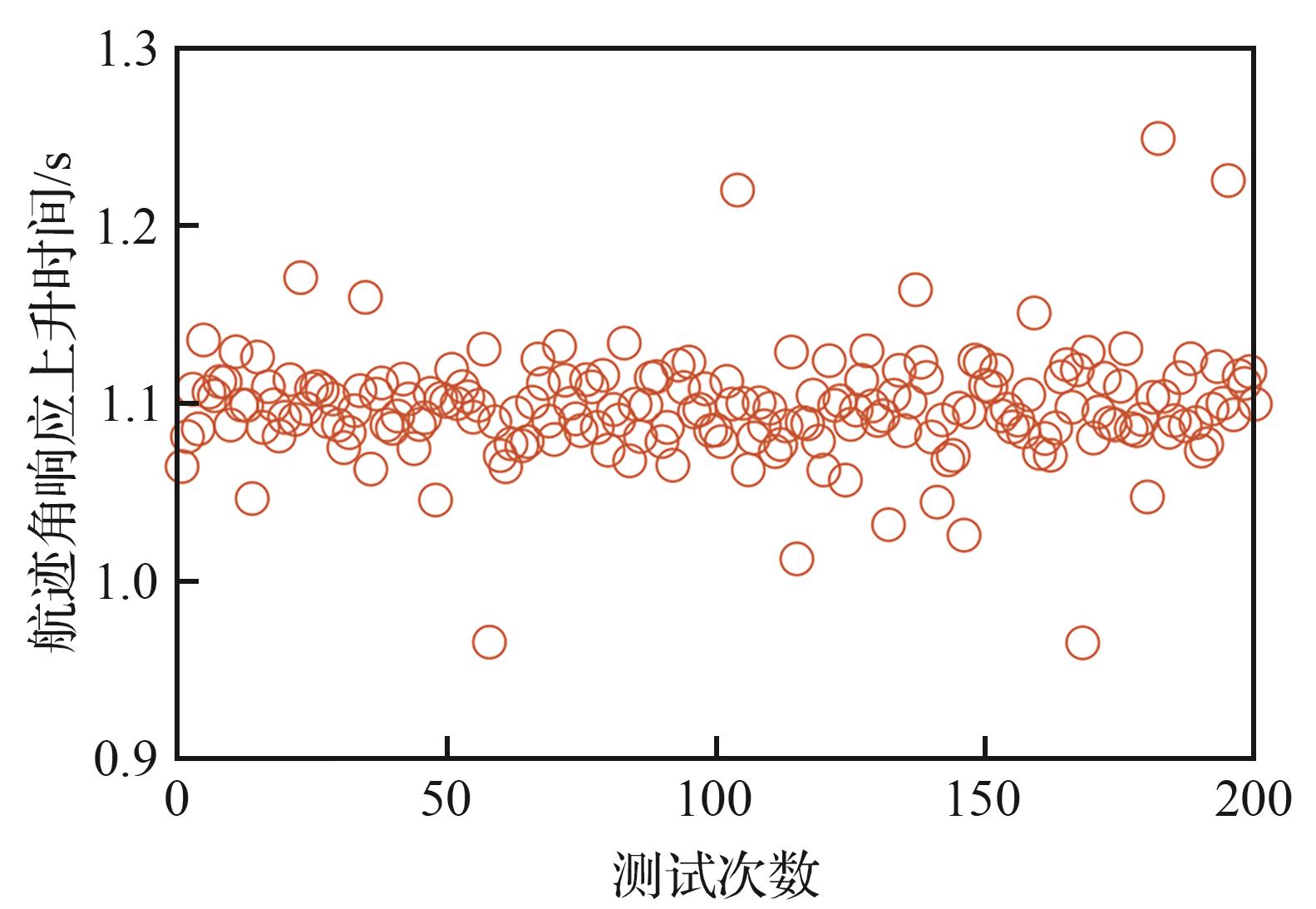
Fig.20
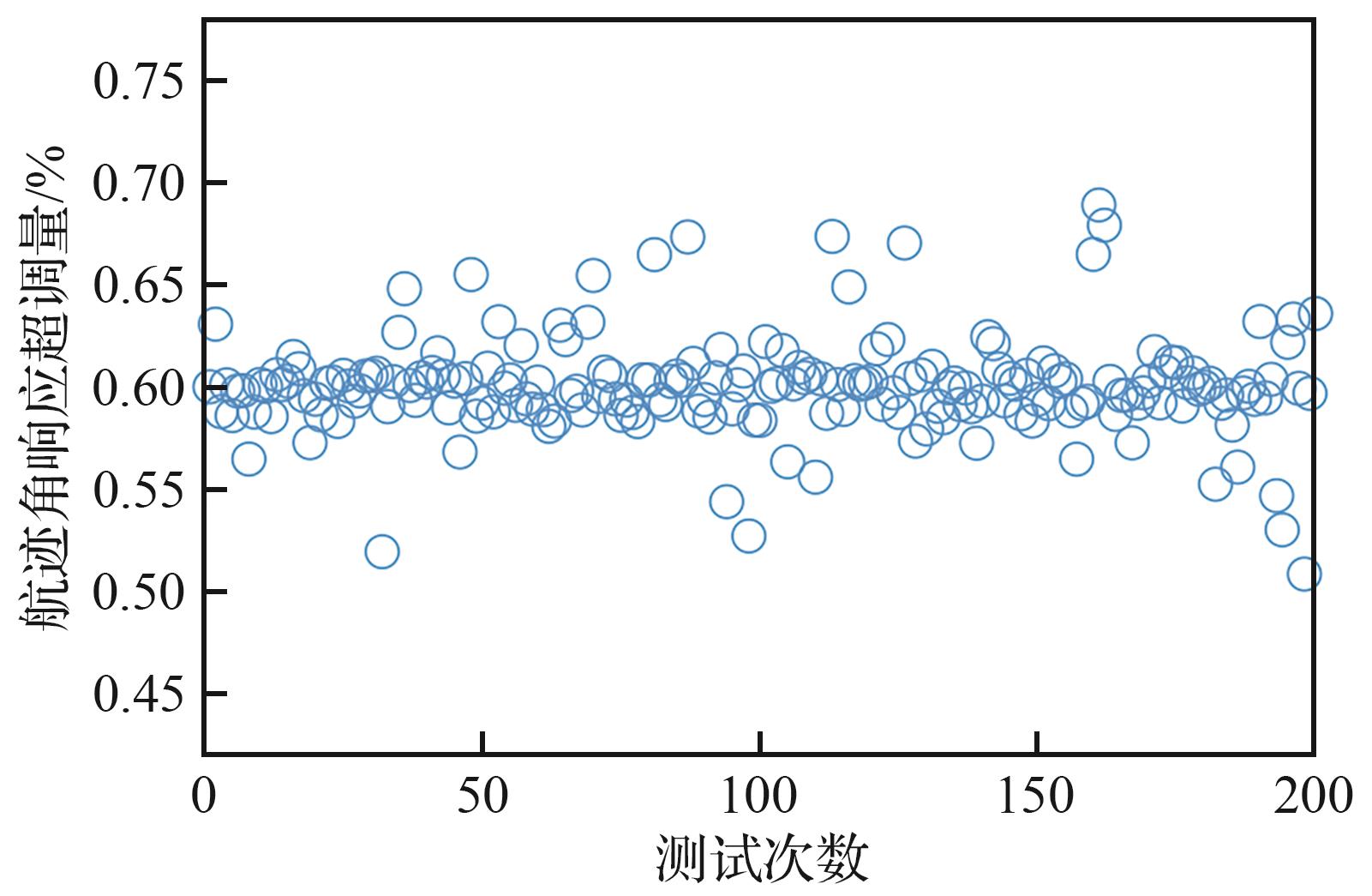
Scatter plot of flight path angle response overshoot
| [1] | 甄子洋, 王新华, 江驹, 等. 舰载机自动着舰引导与控制研究进展[J]. 航空学报, 2017, 38(2): 020435. |
| ZHEN Z Y, WANG X H, JIANG J, et al. Research progress in guidance and control of automatic carrier landing of carrier-based aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(2): 020435 (in Chinese). | |
| [2] | 张志冰, 甄子洋, 江驹, 等. 舰载机自动着舰引导与控制综述[J]. 南京航空航天大学学报, 2018, 50(6): 734-744. |
| ZHANG Z B, ZHEN Z Y, JIANG J, et al. Review on development in guidance and control of automatic carrier landing of carrier-based aircraft[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2018, 50(6): 734-744 (in Chinese). | |
| [3] | ZHEN Z Y, JIANG S Y, JIANG J. Preview control and particle filtering for automatic carrier landing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(6): 2662-2674. |
| [4] | YUAN Y, DUAN H B, ZENG Z G. Automatic carrier landing control with external disturbance and input constraint[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(2): 1426-1438. |
| [5] | MIHAI L G. Backstepping and dynamic inversion combined controller for auto-landing of fixed wing UAVs[J]. Aerospace Science and Technology, 2020, 96: 105526. |
| [6] | DUAN H, YUAN Y, ZENG Z. Automatic carrier landing system with fixed time control[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(4): 3586-3600. |
| [7] | DUAN H B, CHEN L, ZENG Z G. Automatic landing for carrier-based aircraft under the conditions of deck motion and carrier airwake disturbances[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(6): 5276-5291. |
| [8] | URNES R K H J M, MOOMAW R F, HUFF R W. H-dot automatic carrier landing system for approach control in turbulence[J]. Journal of Guidance and Control, 1981, 4(2): 177-183. |
| [9] | DENG Y M, DUAN H B. Control parameter design for automatic carrier landing system via pigeon-inspired optimization[J]. Nonlinear Dynamics, 2016, 85(1): 97-106. |
| [10] | DOU R, DUAN H B. Lévy flight based pigeon-inspired optimization for control parameters optimization in automatic carrier landing system[J]. Aerospace Science and Technology, 2017, 61: 11-20. |
| [11] | 张志冰, 张秀林, 王家兴, 等. 一种基于多操纵面控制分配的IDLC人工着舰精确控制方法[J]. 航空学报, 2021, 42(8): 525840. |
| ZHANG Z B, ZHANG X L, WANG J X, et al. An IDLC landing control method of carrier-based aircraft based on control allocation of multiple control surfaces[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 525840 (in Chinese). | |
| [12] | DENHAM J W. Project MAGIC CARPET: “advanced controls and displays for precision carrier landings”[C]∥54th AIAA Aerospace Sciences Meeting. Reston: AIAA, 2016: 1770. |
| [13] | YAN Y D, YANG J, LIU C J, et al. On the actuator dynamics of dynamic control allocation for a small fixed-wing UAV with direct lift control[J]. IEEE Transactions on Control Systems Technology, 2020, 28(3): 984-991. |
| [14] | ZOU A M, KUMAR K D, HOU Z G. Quaternion-based adaptive output feedback attitude control of spacecraft using Chebyshev neural networks[J]. IEEE Transactions on Neural Networks, 21(9): 1457-1471. |
| [15] | GUAN Z Y, LIU H, ZHENG Z W, et al. Moving path following with integrated direct lift control for carrier landing[J]. Aerospace Science and Technology, 2022, 120: 107247. |
| [16] | 罗飞, 张军红, 王博, 等. 基于直接升力与动态逆的舰尾流抑制方法[J]. 航空学报, 2021, 42(12): 124770. |
| LUO F, ZHANG J H, WANG B, et al. Air wake suppression method based on direct lift and nonlinear dynamic inversion control[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(12): 124770 (in Chinese). | |
| [17] | 杨智博. 舰载机自动着舰系统纵向控制策略研究[D]. 哈尔滨:哈尔滨工程大学, 2020: 31-54. |
| YANG Z B. Research on longitudinal control strategy of carrier-based aircraft automatic landing system[D]. Harbin: Harbin Engineering University, 2020: 31-54 (in Chinese). | |
| [18] | YU Y, WANG H L, LI N, et al. Automatic carrier landing system based on active disturbance rejection control with a novel parameters optimizer[J]. Aerospace Science and Technology, 2017, 69: 149-160. |
| [19] | LUNGU M H, DINU D A, CHEN M, et al. Inverse optimal control for autonomous carrier landing with disturbances[J]. Aerospace Science and Technology, 2023, 139: 108382. |
| [20] | 朱玉莲. 舰载机“魔毯”着舰技术研究[D]. 南京:南京航空航天大学,2020: 38-56. |
| ZHU Y L. Research on “magic carpet” landing technology of carrier-based aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2020: 38-56 (in Chinese). | |
| [21] | 吴文海, 汪节, 高丽, 等. MAGIC CARPET着舰技术分析[J]. 系统工程与电子技术, 2018, 40(9): 2079-2091. |
| WU W H, WANG J, GAO L, et al. Analysis on MAGIC CARPET carrier landing technology[J]. Systems Engineering and Electronics, 2018, 40(9): 2079-2091 (in Chinese). | |
| [22] | 张守权. 基于直接力控制的人工着舰技术综述[J]. 飞机设计, 2022, 42(2): 21-25. |
| ZHANG S Q. A review of manual carrier landing technology based on direct force control[J]. Aircraft Design, 2022, 42(2): 21-25 (in Chinese). |
| [1] | Xinze XU, Guanxin HONG, Liang DU, Gang LIU. Manual approach and landing model of carrier-based aircraft in complex environments [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531802-531802. |
| [2] | Ming YAN, Jiaxing WANG, Heqi LI, Kai LIU. Active disturbance rejection control of carrier-based aircraft based on offline network/online identification [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531317-531317. |
| [3] | Yu LI, Tongwen CHEN, Zhigang WANG, Chiyung WEN, Xiaoxiong LIU. Incremental control of direct lift landing based on predefined-time theory [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531163-531163. |
| [4] | Dapeng ZHOU, Xiaolei QU. Knowledge-based intelligent pigeon-inspired optimization of carrier-based aircraft landing control [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730801-730801. |
| [5] | Fei LUO, Zhiyong HU, Junfu LI, Zemeng MA, Junqiang AI. Design and on⁃vehicle demonstration of autonomous docking control system for soft towed grabber [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628921-628921. |
| [6] | ZHANG Zhibing, ZHANG Xiulin, WANG Jiaxing, SHI Jingping. An IDLC landing control method of carrier-based aircraft based on control allocation of multiple control surfaces [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(8): 525840-525840. |
| [7] | LUO Fei, ZHANG Junhong, WANG Bo, TANG Ruilin, TANG Wei. Air wake suppression method based on direct lift and nonlinear dynamic inversion control [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(12): 124770-124770. |
| [8] | DUAN Zhuoyi, WANG Wei, GENG Jianzhong, HE Daquan, MA Kun. Precision trajectory manual control technologies for carrier-based aircraft approaching and landing [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2019, 40(4): 622328-622328. |
| [9] | ZHANG Yang, WU Wenhai, WANG Jie. Design of carrier UAV lateral/directional landing control law [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2017, 38(S1): 721489-721489. |
| [10] | WANG Qian, LI Qing, CHENG Nong, SONG Jingyan. A nonlinear fault tolerant flight control method against structural damage [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2016, 37(2): 637-647. |
| [11] | Wang Jian-pei;Wang Zhong-jun. APPLICATION OF EIGENSTRUCTURE ASSIGNMENT TO DESIGN DIRECT LIFT CONTROL LAW [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 1992, 13(6): 241-248. |
| [12] | Feng Gang. DESIGN OF DIRECT LIFT CONTROL SYSTEMS AGAINST VERTICAL GUST [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 1900, 1(1): 300-304. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341