Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (15): 329607.doi: 10.7527/S1000-6893.2023.29607
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Tiancai WU1,2,3, Honglun WANG1,3( ), Bin REN1,3, Yiheng LIU1,2,3, Xingyu WU1,3, Guocheng YAN1,3
), Bin REN1,3, Yiheng LIU1,2,3, Xingyu WU1,3, Guocheng YAN1,3
Received:2023-09-19
Revised:2023-11-09
Accepted:2024-01-09
Online:2024-08-15
Published:2024-01-16
Contact:
Honglun WANG
E-mail:wang_hl_12@126.com
Supported by:CLC Number:
Tiancai WU, Honglun WANG, Bin REN, Yiheng LIU, Xingyu WU, Guocheng YAN. Learning-based integrated fault-tolerant guidance and control for hypersonic vehicles considering avoidance and penetration[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 329607.
Fig.1
Schematic diagram of no-fly zone and interceptor

Fig.2
Structure diagram of proposed method
Fig.3
Structure diagram of attitude fault-tolerant control system[21]
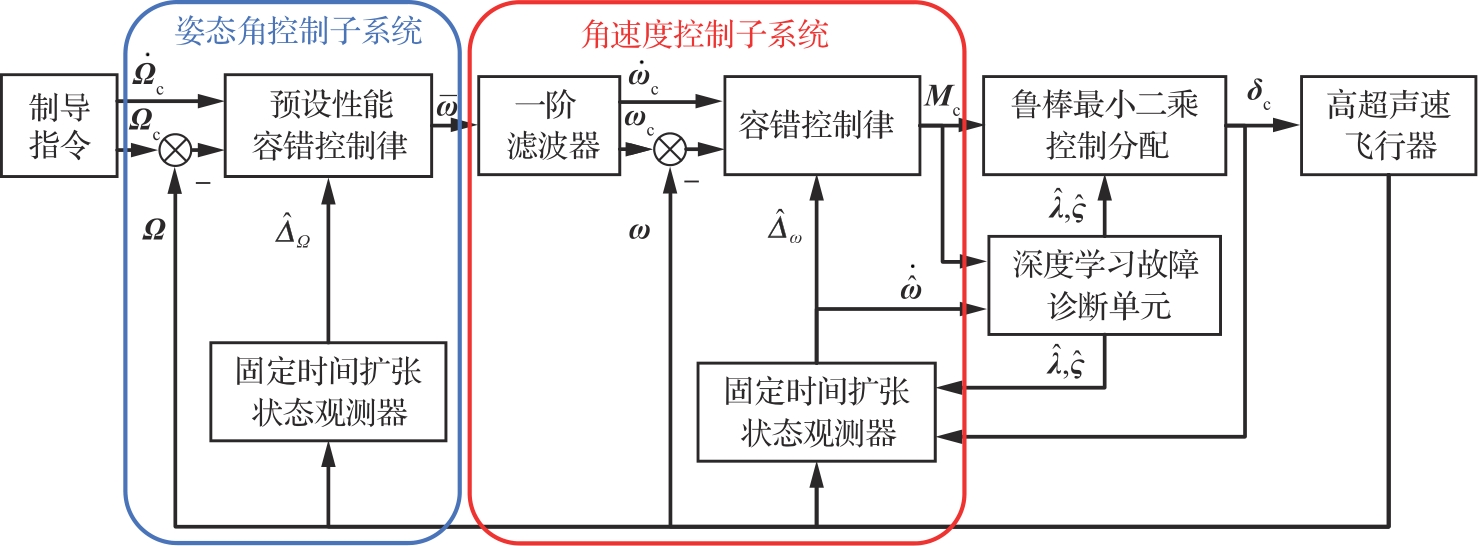
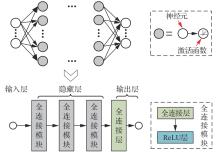
Fig.4
Structure diagram of range-to-go predictive network
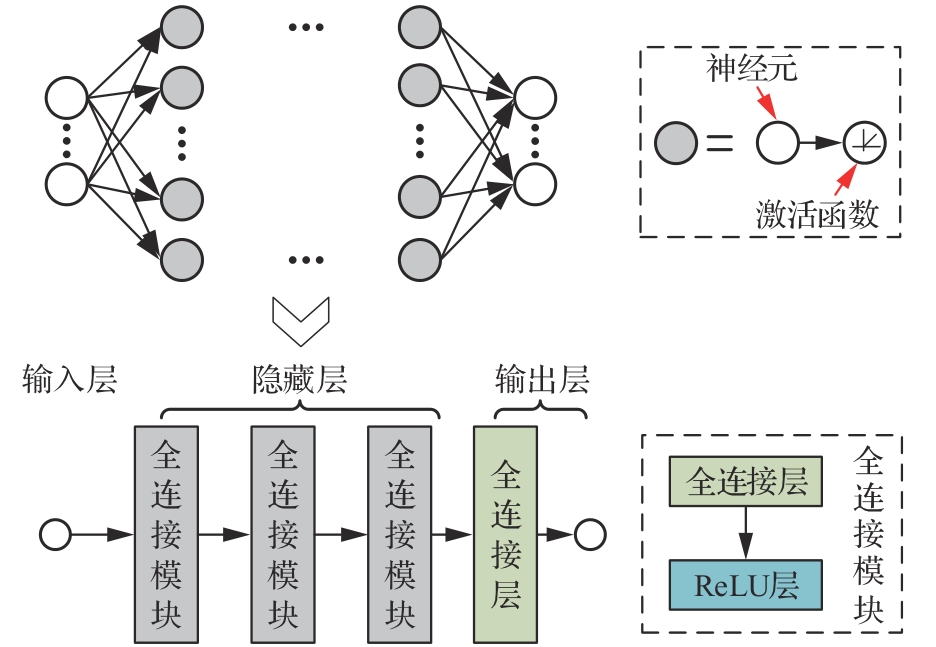
Table 1
Initial state dispersion deviation and parameter perturbation of vehicle
| 扰动项 | 分布类型 | 误差界 |
|---|---|---|
| 初始经度散布偏差 | 均匀分布 | ±0.5 |
| 初始纬度散布偏差 | 均匀分布 | ±0.5 |
| 初始高度散布偏差 | 均匀分布 | ±2 |
| 初始速度散布偏差 | 均匀分布 | ±100 |
| 初始弹道倾角散布偏差 | 均匀分布 | ±0.2 |
| 初始弹道偏角散布偏差 | 均匀分布 | ±0.5 |
| 气动系数 | 均匀分布 | ±30 |
| 执行机构故障 | 均匀分布 | 0~100 |
Fig.5
Heading angle error corridor
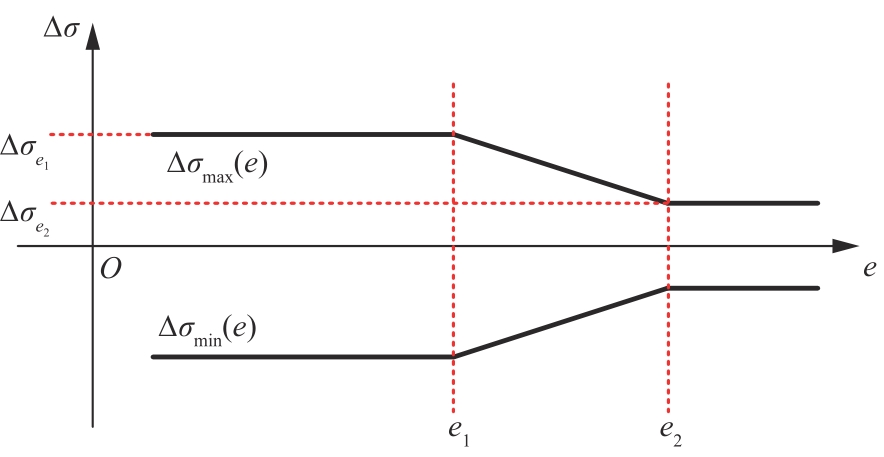
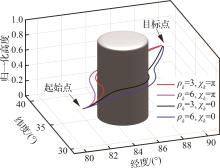
Fig.6
Avoidance trajectories for different parameter combinations
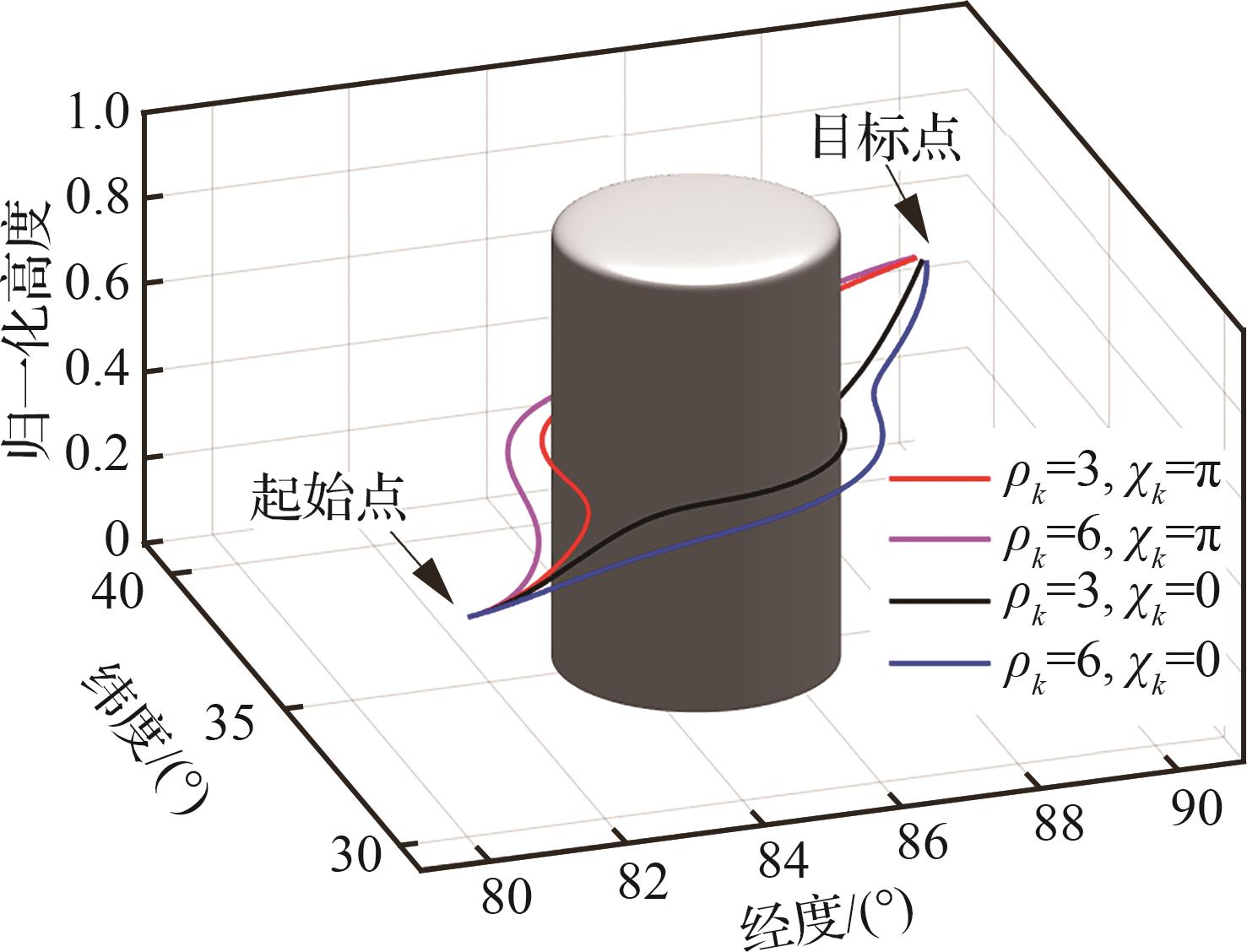

Fig.7
Schematic diagram of TD3 algorithm training structure
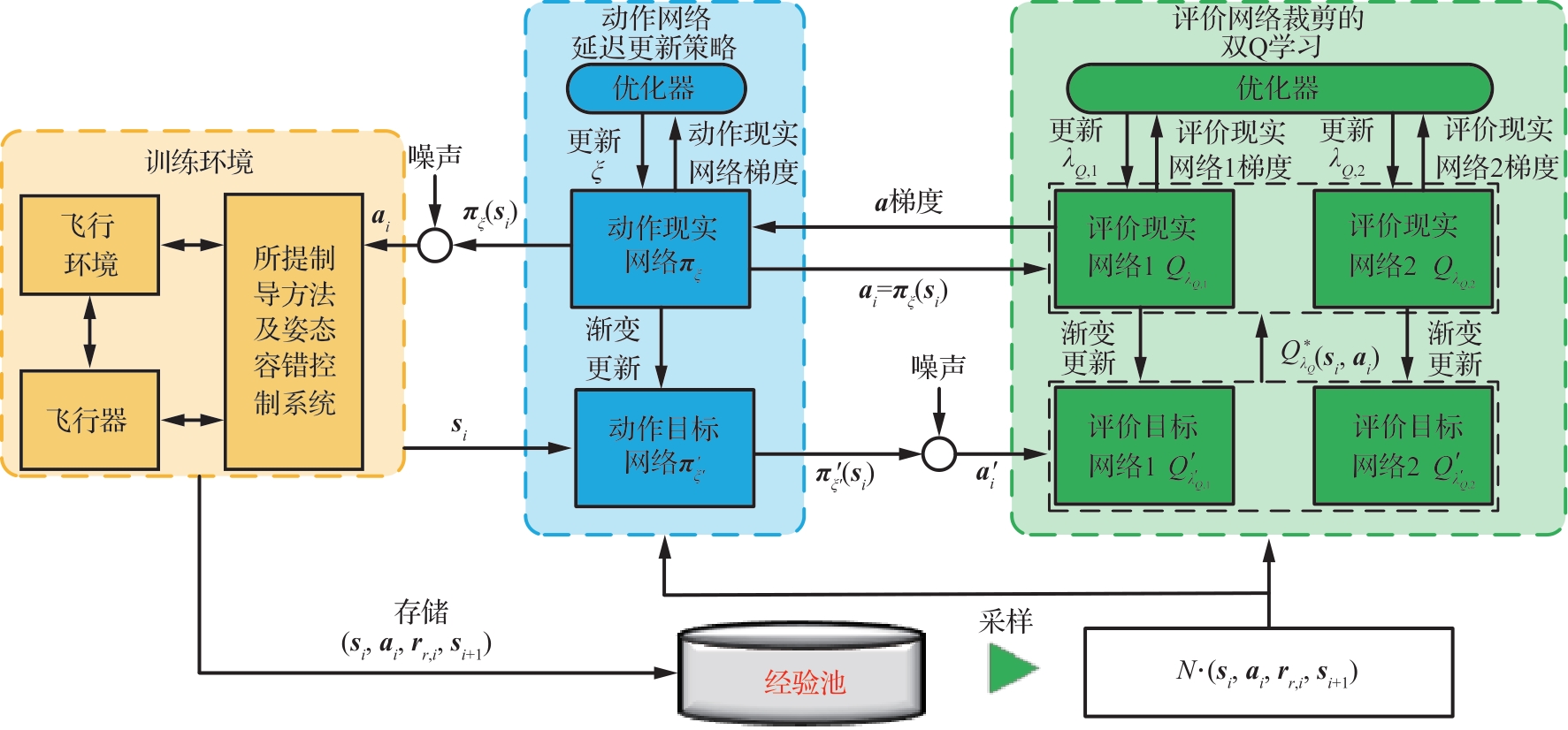
Fig.8
Schematic diagram of network structure
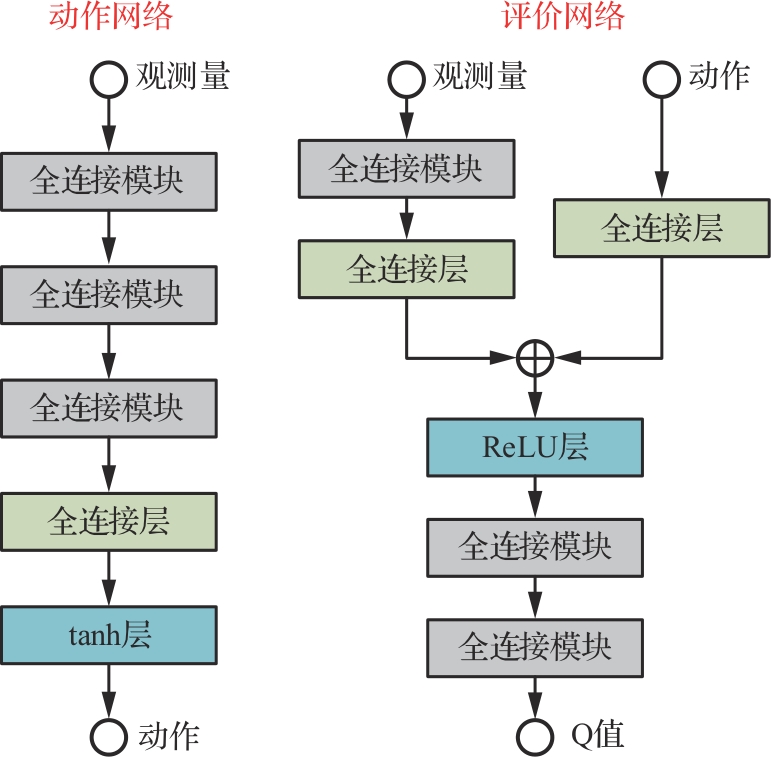
Fig.9
Range-to-go prediction curves
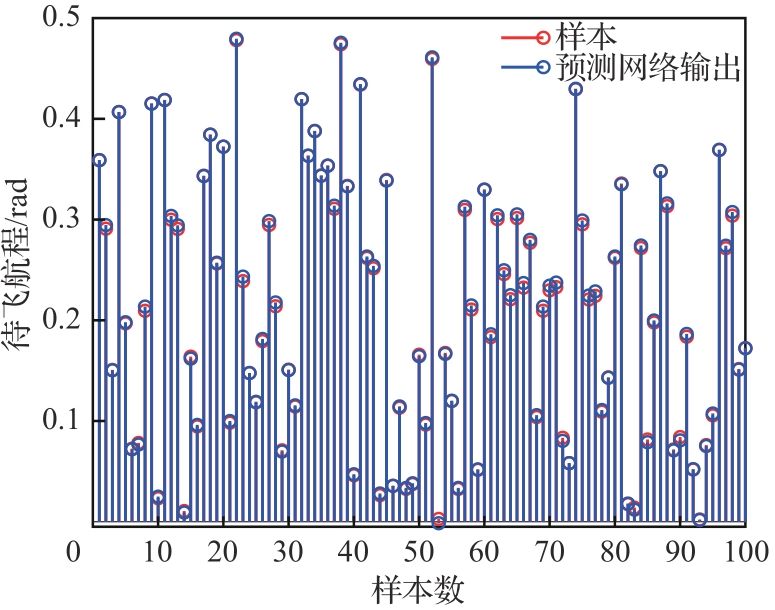
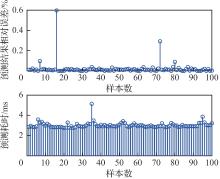
Fig.10
Statistical results of relative error and time consumption of prediction

Table 2
Central position, radius, and perturbation range of no-fly zones
| 编号 | 禁飞区中心位置/ | 半径/ | 中心位置摄动范围/ | 分布类型 | |
|---|---|---|---|---|---|
| 经度 | 纬度 | ||||
| 1 | 10 | 8.5 | 180 | 0.3 | 均匀分布 |
| 2 | 14.5 | 6 | 180 | 0.3 | 均匀分布 |
| 3 | 20.5 | 11.5 | 180 | 0.3 | 均匀分布 |
| 4 | 22.5 | 8 | 180 | 0.3 | 均匀分布 |
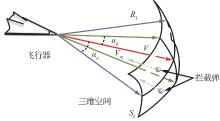
Fig.11
Schematic diagram of interceptor initial position
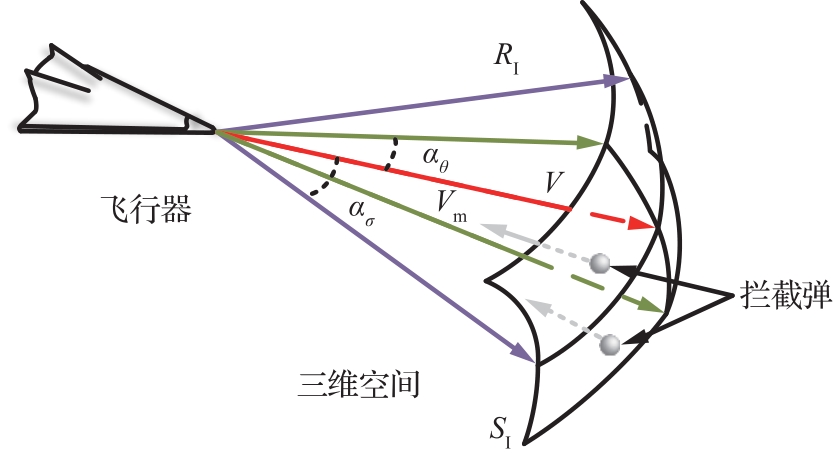
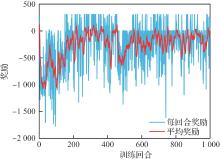
Fig.12
Reward curve during TD3 training process
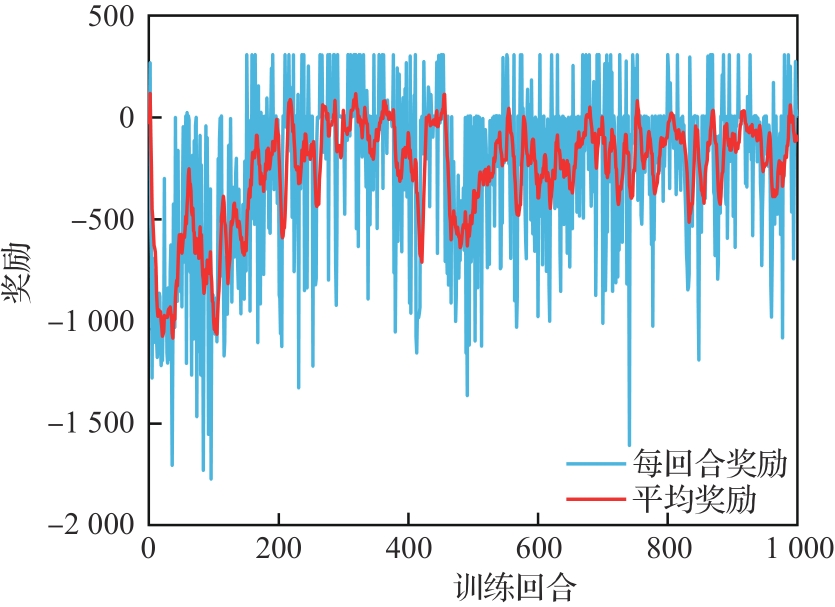
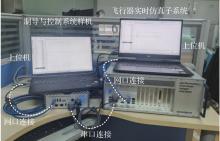
Fig.13
Physical diagram of semi-physical simulation test system
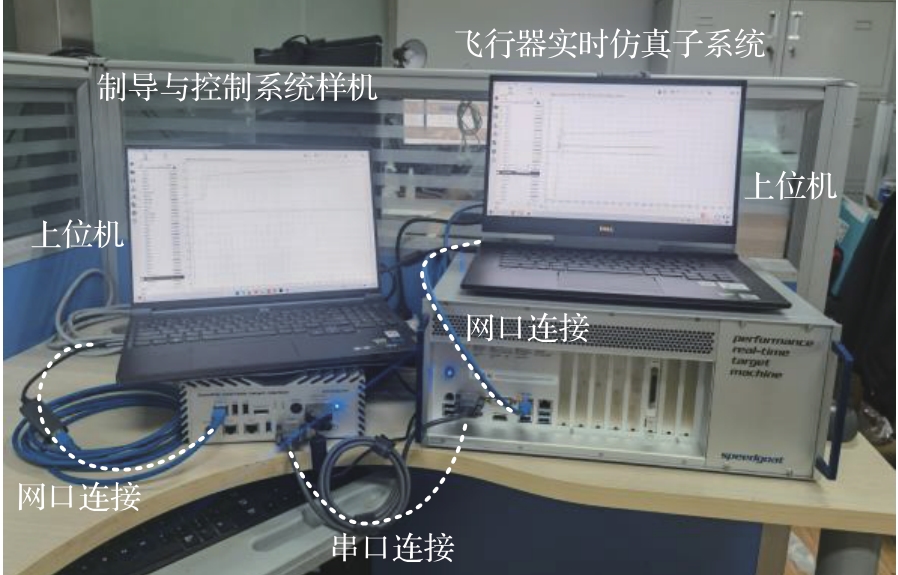
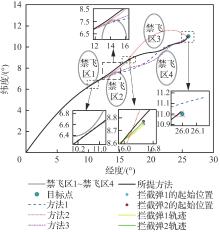
Fig.14
Flight trajectories in comparative simulation
Fig.15
Parameter curves of IFDS in comparative simulation
Fig.16
Heading angle curves in comparative simulation
Fig.17
Curves of distance between vehicle and interceptors in comparative simulation
Fig.18
Height and velocity curves in comparative simulation
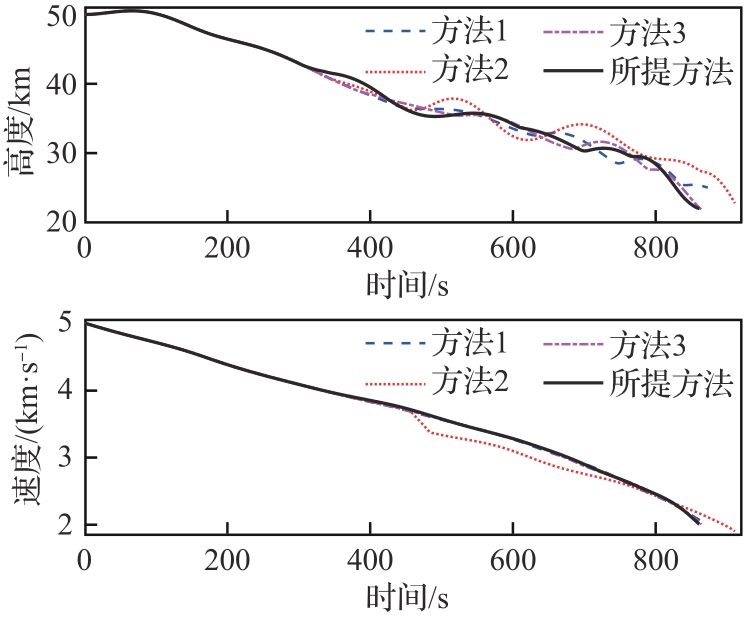
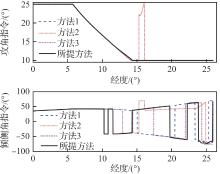
Fig.19
Guidance command curves in comparative simulation
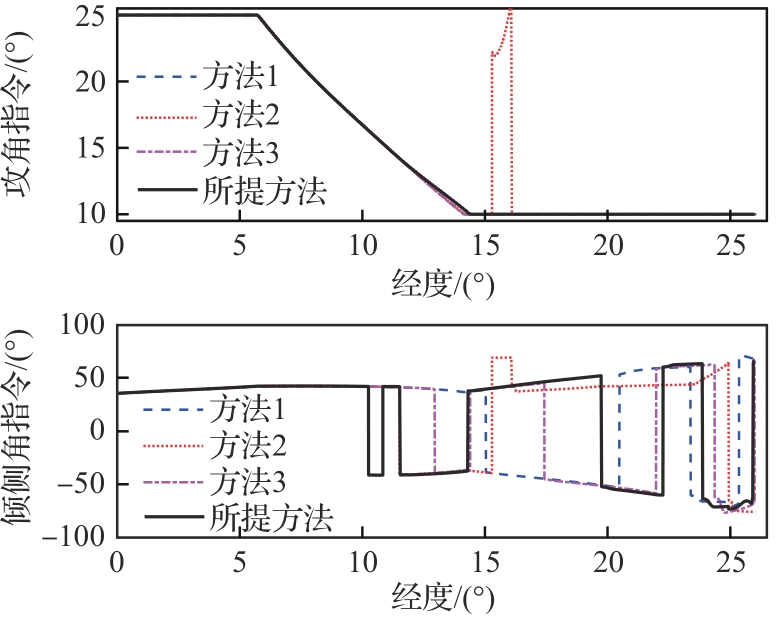

Fig.20
Attitude angle tracking curves in comparative simulation
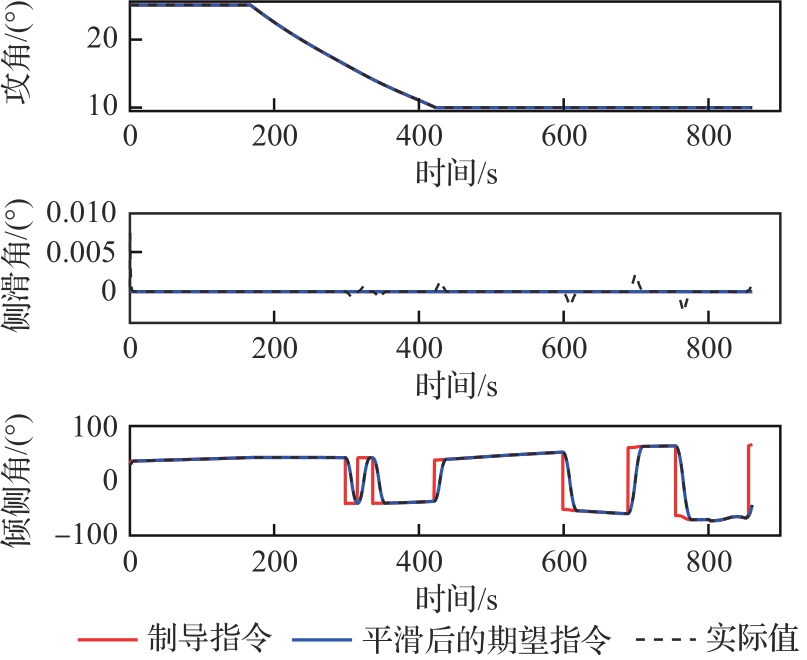
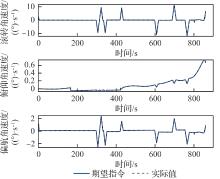
Fig.21
Attitude angular rate tracking curves in comparative simulation
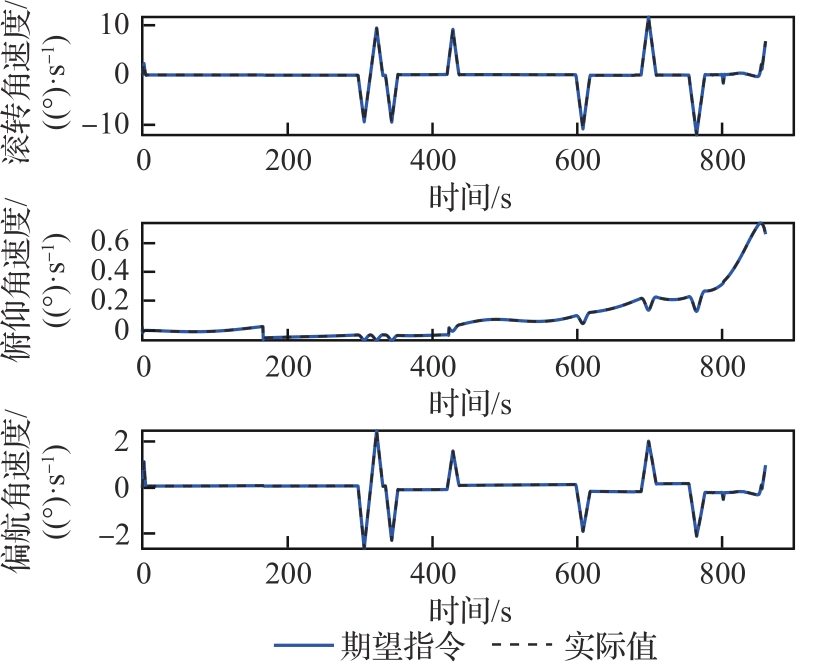

Fig.22
Rudder deviation curves in comparative simulation
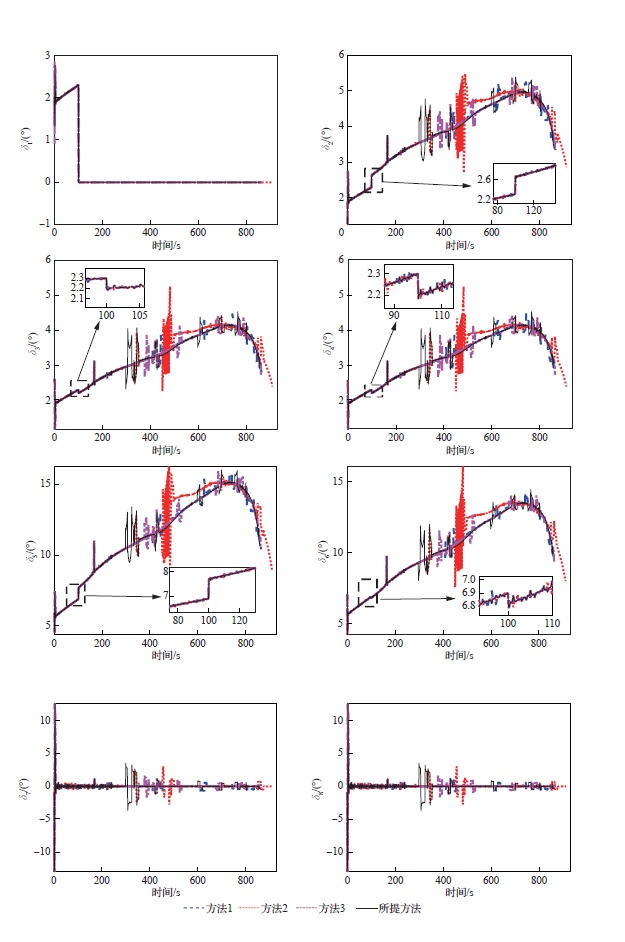
Table 3
Guidance result statistics in comparative simulation
| 方法 | 终端位置误差/ | 终端高度误差/ | 终端速度误差/ | 平均单步耗时/ |
|---|---|---|---|---|
| 方法1 | 24.34 | 3.02 | 0.84 | 47.67 |
| 方法2 | 3.59 | 2.78 | -17.54 | 11.36 |
| 方法3 | 4.01 | 0.86 | 5.04 | 14.41 |
| 所提方法 | 2.93 | 0.77 | 7.67 | 28.23 |
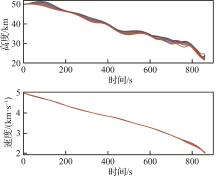
Fig.23
Height and velocity curves in Monte Carlo simulation
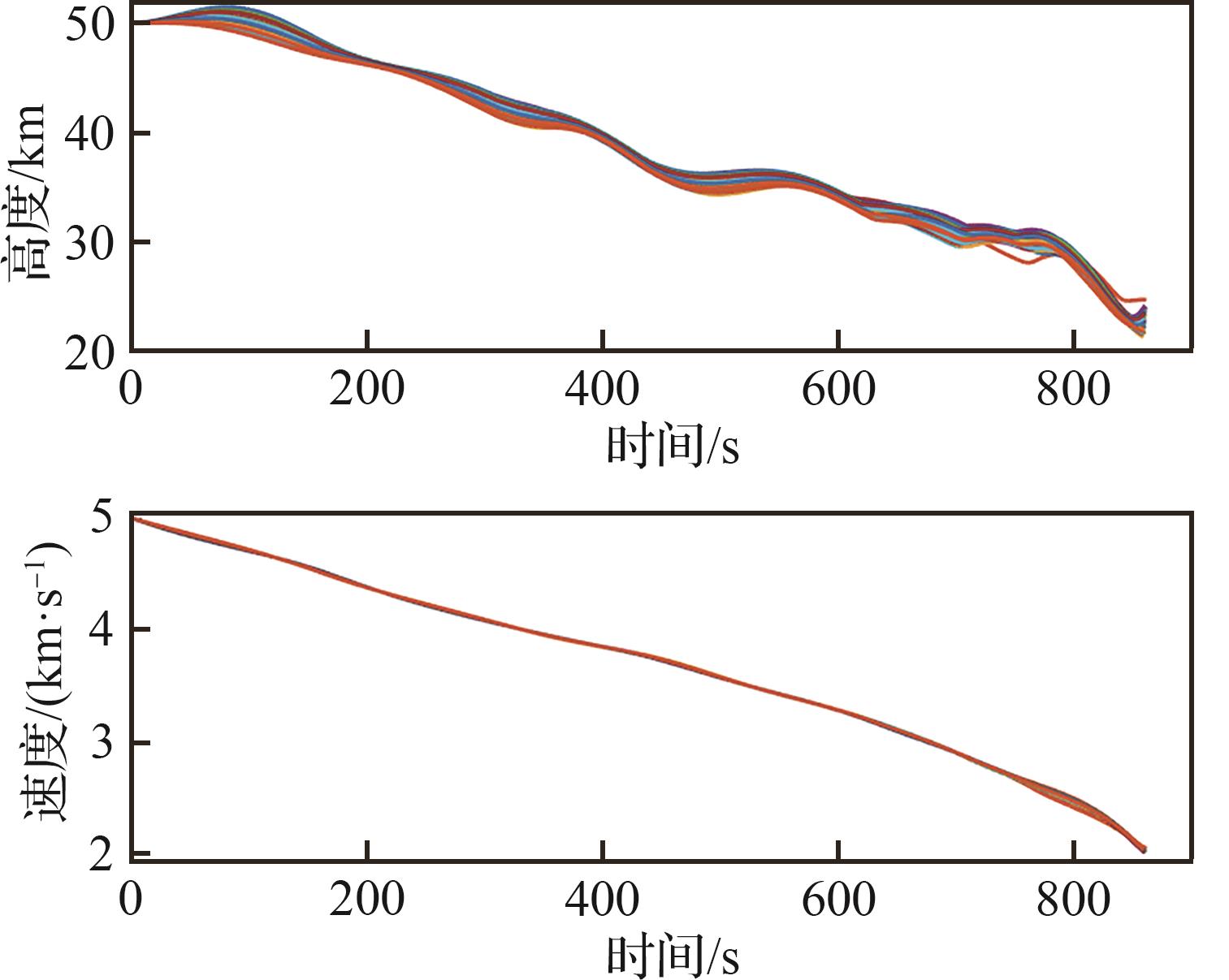

Fig.24
Scatter statistics of terminal position statistics in Monte Carlo simulation
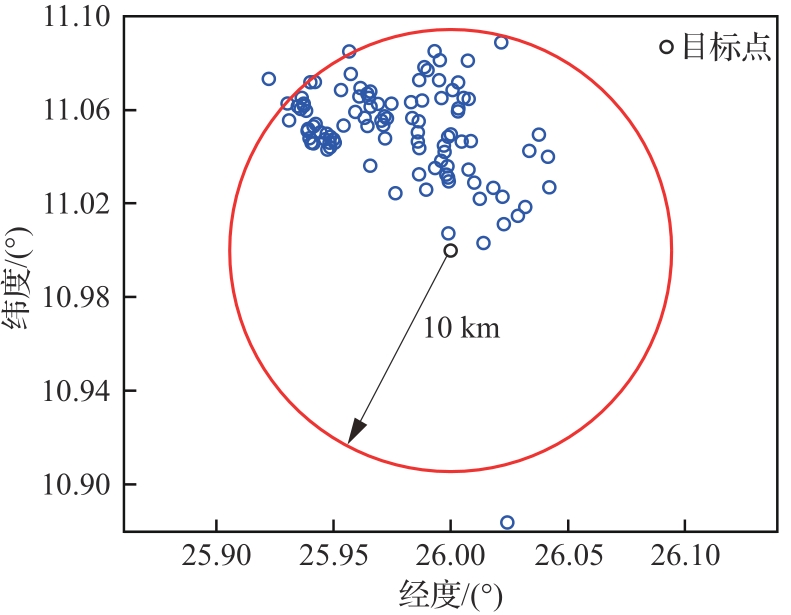
Fig.25
Scatter statistics of minimum distance between vehicle and no-fly zone in Monte Carlo simulation
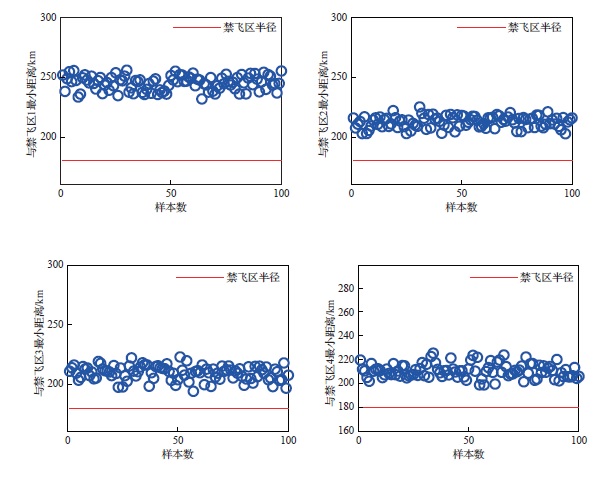
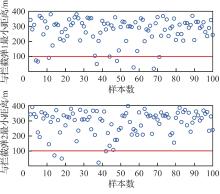
Fig.26
Scatter statistics of minimum distance between vehicle and interceptor in Monte Carlo simulation
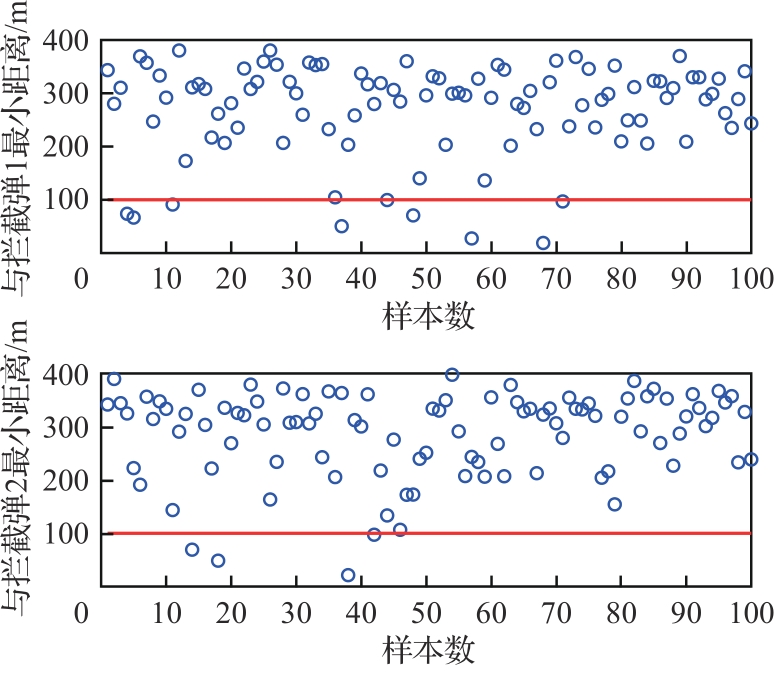
Table 4
Guidance results statistics in Monte Carlo simulation
| 统计对象 | 单项约束满足的次数 | 所有约束均 满足的次数 |
|---|---|---|
| 禁飞区 | 禁飞区1~禁飞区4:100 | 85 |
| 拦截弹 | 拦截弹1:92,拦截弹2:96 | |
| 终端约束 | 高度:97,速度:100,位置:97 |
| 1 | DING Y B, YUE X K, CHEN G S, et al. Review of control and guidance technology on hypersonic vehicle[J]. Chinese Journal of Aeronautics, 2022, 35(7): 1-18. |
| 2 | WU T C, WANG H L, LIU Y H, et al. Learning-based interfered fluid avoidance guidance for hypersonic reentry vehicles with multiple constraints[J]. ISA Transactions, 2023, 139: 291-307. |
| 3 | 王铮, 邢晓露, 闫天, 等. 高超声速飞行器突防制导的发展现状与未来发展方向[J]. 飞航导弹, 2021(7): 18-24. |
| WANG Z, XING X L, YAN T, et al. Development status and future development direction of hypersonic vehicle penetration guidance[J]. Aerodynamic Missile Journal, 2021(7): 18-24 (in Chinese). | |
| 4 | ZHANG Y, ZHANG R, LI H F. Online path decision of no-fly zones avoidance for hypersonic vehicles based on a graph attention network[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(5): 5554-5567. |
| 5 | 余跃, 王宏伦. 基于深度学习的高超声速飞行器再入预测校正容错制导[J]. 兵工学报, 2020, 41(4): 656-669. |
| YU Y, WANG H L. Deep learning-based reentry predictor-corrector fault-tolerant guidance for hypersonic vehicles[J]. Acta Armamentarii, 2020, 41(4): 656-669 (in Chinese). | |
| 6 | LU P. Entry guidance: A unified method[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(3): 713-728. |
| 7 | CHENG L, JIANG F H, WANG Z B, et al. Multiconstrained real-time entry guidance using deep neural networks[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 325-340. |
| 8 | 郭建国, 梁乐成, 周敏, 等. 高速飞行器俯冲段制导控制一体化综述[J]. 航空兵器, 2023, 30(1): 1-10. |
| GUO J G, LIANG L C, ZHOU M, et al. Overview of integrated guidance and control for hypersonic vehicles in dive phase[J]. Aero Weaponry, 2023, 30(1): 1-10 (in Chinese). | |
| 9 | HOU M Z, LIANG X L, DUAN G R. Adaptive block dynamic surface control for integrated missile guidance and autopilot[J]. Chinese Journal of Aeronautics, 2013, 26(3): 741-750. |
| 10 | LIU X D, HUANG W W, DU L F. An integrated guidance and control approach in three-dimensional space for hypersonic missile constrained by impact angles[J]. ISA Transactions, 2017, 66: 164-175. |
| 11 | BAO C Y, WANG P, TANG G J. Integrated method of guidance, control and morphing for hypersonic morphing vehicle in glide phase[J]. Chinese Journal of Aeronautics, 2021, 34(5): 535-553. |
| 12 | YAN B B, LIU R F, DAI P, et al. A rapid penetration trajectory optimization method for hypersonic vehicles[J]. International Journal of Aerospace Engineering, 2019, 2019: 1490342. |
| 13 | SHEN Z P, YU J L, DONG X W, et al. Penetration trajectory optimization for the hypersonic gliding vehicle encountering two interceptors[J]. Aerospace Science and Technology, 2022, 121: 107363. |
| 14 | 邵会兵. 滑翔飞行器滑翔能力智能预示与多约束制导研究[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| SHAO H B. Gliding manoeuvrability intelligent prediction and multi-constrained guidance for gliding vehicles[D]. Harbin: Harbin Institute of Technology, 2020 (in Chinese). | |
| 15 | JORRIS T R, COBB R G. Three-dimensional trajectory optimization satisfying waypoint and no-fly zone constraints[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(2): 551-572. |
| 16 | ZHAO D J, SONG Z Y. Reentry trajectory optimization with waypoint and no-fly zone constraints using multiphase convex programming[J]. Acta Astronautica, 2017, 137: 60-69. |
| 17 | LIANG Z X, LIU S Y, LI Q D, et al. Lateral entry guidance with no-fly zone constraint[J]. Aerospace Science and Technology, 2017, 60: 39-47. |
| 18 | ZHANG D, LIU L, WANG Y J. On-line reentry guidance algorithm with both path and no-fly zone constraints[J]. Acta Astronautica, 2015, 117: 243-253. |
| 19 | HU Y D, GAO C S, LI J L, et al. A novel adaptive lateral reentry guidance algorithm with complex distributed no-fly zones constraints[J]. Chinese Journal of Aeronautics, 2022, 35(7): 128-143. |
| 20 | 惠俊鹏, 汪韧, 郭继峰. 基于强化学习的禁飞区绕飞智能制导技术[J]. 航空学报, 2023, 44(11): 327416. |
| HUI J P, WANG R, GUO J F. Intelligent guidance for no-fly zone avoidance based on reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(11): 327416 (in Chinese). | |
| 21 | WU T C, WANG H L, YU Y, et al. Hierarchical fault-tolerant control for over-actuated hypersonic reentry vehicles[J]. Aerospace Science and Technology, 2021, 119: 107134. |
| 22 | 惠俊鹏, 汪韧, 俞启东. 基于强化学习的再入飞行器“新质” 走廊在线生成技术[J]. 航空学报, 2022, 43(9): 325960. |
| HUI J P, WANG R, YU Q D. Generating new quality flight corridor for reentry aircraft based on reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(9): 325960 (in Chinese). | |
| 23 | WU J F, WANG H L, LIU Y H, et al. Learning-based fixed-wing UAV reactive maneuver control for obstacle avoidance[J]. Aerospace Science and Technology, 2022, 126: 107623. |
| 24 | CHEN Y D, WANG J N, WANG C Y, et al. Three-dimensional cooperative homing guidance law with field-of-view constraint[J]. Journal of Guidance, Control, and Dynamics, 2019, 43(2): 389-397. |
| 25 | CHANG J, GUO Z Y, CIESLAK J, et al. Integrated guidance and control design for the hypersonic interceptor based on adaptive incremental backstepping technique[J]. Aerospace Science and Technology, 2019, 89: 318-332. |
| 26 | 包为民, 朱建文, 张洪波, 等. 高超声速飞行器全程制导方法[M]. 北京: 科学出版社, 2021: 97-106. |
| BAO W M, ZHU J W, ZHANG H B, et al. Full-course guidance method for hypersonic vehicle[M]. Beijing: Science Press, 2021: 97-106 (in Chinese). | |
| 27 | 吴健发, 王宏伦, 王延祥, 等. 无人机反应式扰动流体路径规划[J]. 自动化学报, 2023, 49(2): 272-287. |
| WU J F, WANG H L, WANG Y X, et al. UAV reactive interfered fluid path planning[J]. Acta Automatica Sinica, 2023, 49(2): 272-287 (in Chinese). | |
| 28 | FUJIMOTO S, VAN HOOF H, MEGER D. Addressing function approximation error in actor-critic methods[DB/OL]. arXiv preprint: 1802.09477, 2018. |
| [1] | Kaifang WAN, Zhilin WU, Yunhui WU, Haozhi QIANG, Yibo WU, Bo LI. Cooperative location of multiple UAVs with deep reinforcement learning in GPS-denied environment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331024-331024. |
| [2] | Lingfeng JIANG, Xinkai LI, Hai ZHANG, Hanwei LI, Hongli ZHANG. Mapless navigation of UAVs in dynamic environments based on an improved TD3 algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331035-331035. |
| [3] | Feng QU, Qing WANG, Shaowen CHENG, Kaiqiang WANG. Aerodynamic shape optimization design of airframe/propulsion integrated hypersonic aircraft with aerodynamics/trajectory/ control coupling [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 130874-130874. |
| [4] | Min YANG, Guanjun LIU, Ziyuan ZHOU. Control of lunar landers based on secure reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630553-630553. |
| [5] | Yousheng WANG, Liguo SUN, Jinpeng WEI, Wenqian TAN, Yonghao PAN. Optimization of climb trajectory of combined-cycle engine powered aircraft based on improved CSO-Gauss pseudospectral method [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(2): 230737-230737. |
| [6] | Chen WANG, Caisheng WEI, Zeyang YIN, Kai JIN, Xingchen LI. Collaborative planning of multi-UAV trajectories and communication strategies considering channel resource constraints [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 331837-331837. |
| [7] | Xunliang YAN, Peichen WANG, Yang GUO. Review of trajectory planning and guidance methods for entry glide maneuvering penetration [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331810-331810. |
| [8] | Jianye SUN, Dong YE, Yan XIAO. Active observation trajectory planning for non-cooperative spacecraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331587-331587. |
| [9] | Yu WANG, Zhipeng XIE, Yongjian TIAN, Guanglei MENG. Distributed UAV formation control with virtual structure guided reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331354-331354. |
| [10] | Wei CHEN, Lulu LI, Dong CHEN, Shaohui ZHANG, Yafei LI, Ke WANG, Yuanyuan JIN, Mingliang XU. Multi-aircraft cooperative decision-making methods driven by differentiated support demands for carrier-based aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531274-531274. |
| [11] | Xudong CHEN, Qiqi CHEN, Yizhe LUO, Jiabao WANG, Mingliang XU. Dynamic parallel scheduling of heterogeneous carrier-based aircraft deck support operations [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531329-531329. |
| [12] | Zheng WANG, Hua WANG, Keke CUI, Chaochao LI, Junnan LIU, Mingliang XU. Locally guided reinforcement learning for autonomous dispatching of carrier-based aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531333-531333. |
| [13] | Wenhui LING, Chunhui MU, Lingcong NIE, Xian DU, Ximing SUN. Improved DDPG-based multipoint pressure distribution control of variable geometry scramjet combustor at wide range velocities [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 131092-131092. |
| [14] | Zijie YU, Zheng ZHENG, Qingdong LI, Lin GUO, Suping REN, Jian GUO. Trajectory planning for solar-powered UAVs based on deep reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 331420-331420. |
| [15] | Yunxiang CHEN, Jianping ZHANG, Zhiyuan WANG, Xiang ZOU, Yifei ZHAO, Tingfeng LAI. Safety separation calculation model for multi-rotor drones in low-altitude airspace based on avoidance strategy [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531887-531887. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341