Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (15): 630160-630160.doi: 10.7527/S1000-6893.2024.30160
• special column • Previous Articles
Zhenhua DOU1, Kai GUO1( ), Xiaoming HUANG2, Jie SUN1, Zheqing ZUO3, Shoujun ZHAO3
), Xiaoming HUANG2, Jie SUN1, Zheqing ZUO3, Shoujun ZHAO3
Received:2024-01-15
Revised:2024-03-06
Accepted:2024-04-10
Online:2024-05-11
Published:2024-04-25
Contact:
Kai GUO
E-mail:kaiguo@sdu.edu.cn
Supported by:CLC Number:
Zhenhua DOU, Kai GUO, Xiaoming HUANG, Jie SUN, Zheqing ZUO, Shoujun ZHAO. Composite adaptive tracking control of aerospace electro⁃hydrostatic actuator servo system[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 630160-630160.
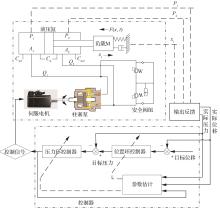
Fig.1
EHA and control system schematic
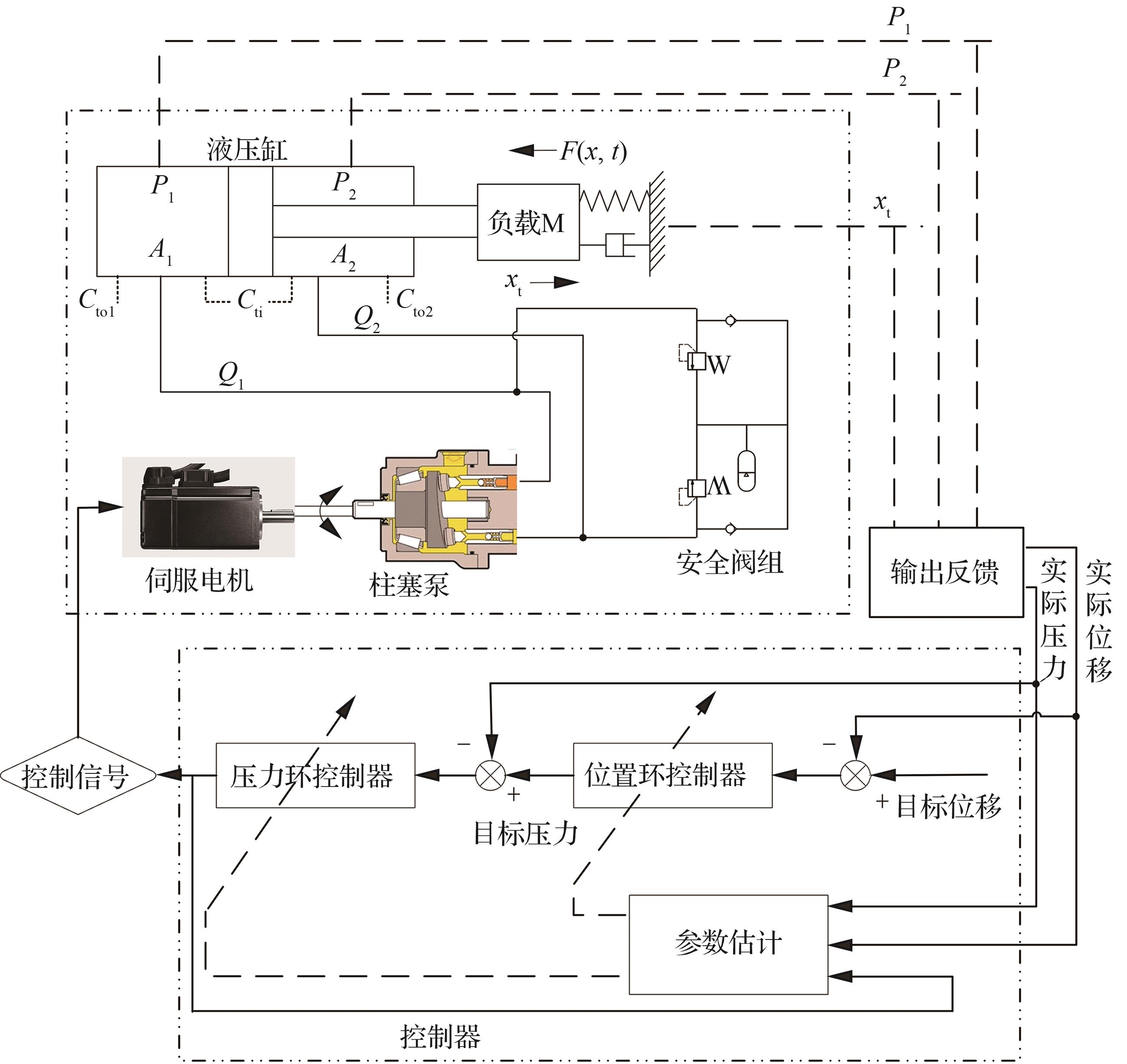
Table 1
EHA system physical parameters
| 参数 | 数值 |
|---|---|
| 23.96 | |
| 5 | |
| 5 | |
| 1.26×10-3 | |
| 6.41×10-3 | |
| 1.0 | |
| 2.4×10-3 | |
| 1.4×10-3 | |
| 10 | |
| 100 | |
| 100 |
Table 2
EHA system control parameters
| 参数 | kc11 | kc12 | kc13 | kc21 | kc22 | |
|---|---|---|---|---|---|---|
| 数值 | 10 | 25×105 | 5×105 | 1.5×10-4 | 1 | 5×10-3 |
| 参数 | ||||||
| 数值 | 200 | 1 | 2.5I | 2.5I | 6 | 6 |
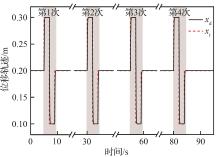
Fig.2
Tracking trajectory of hydraulic cylinder rod displacement


Fig.3
Control effect curve of NLCLAC
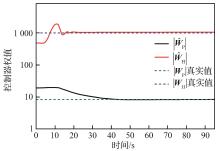
Fig.4
Controller weights comparisons of NLCLAC
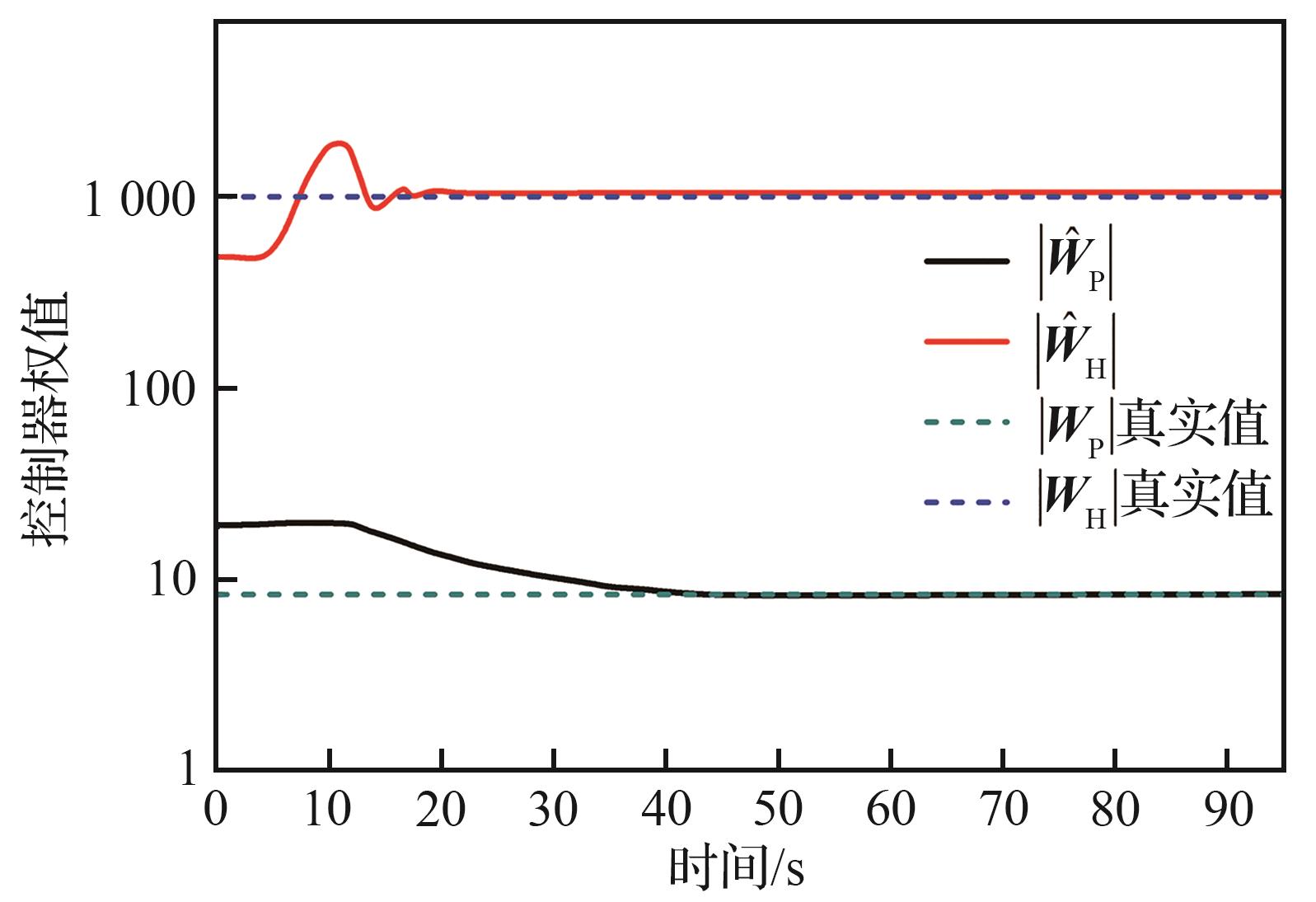
Fig.5
EHA test stand structure
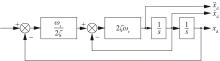
Fig.6
Second-order filter model
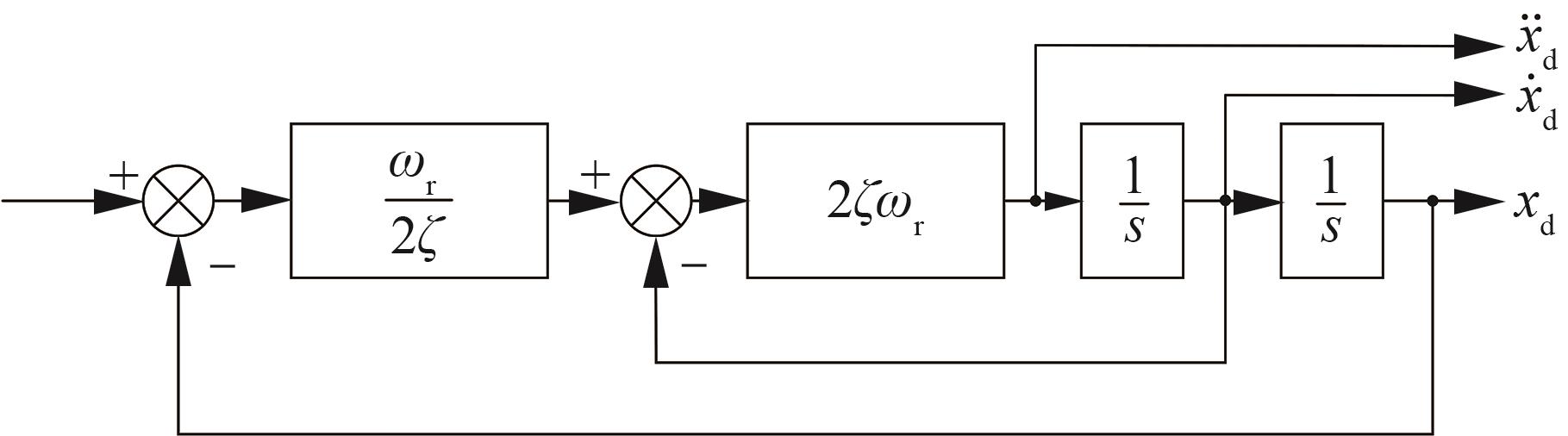
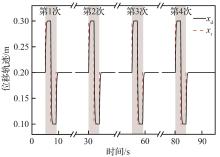
Fig.7
Desired trajectory of hydraulic cylinder rod displacement
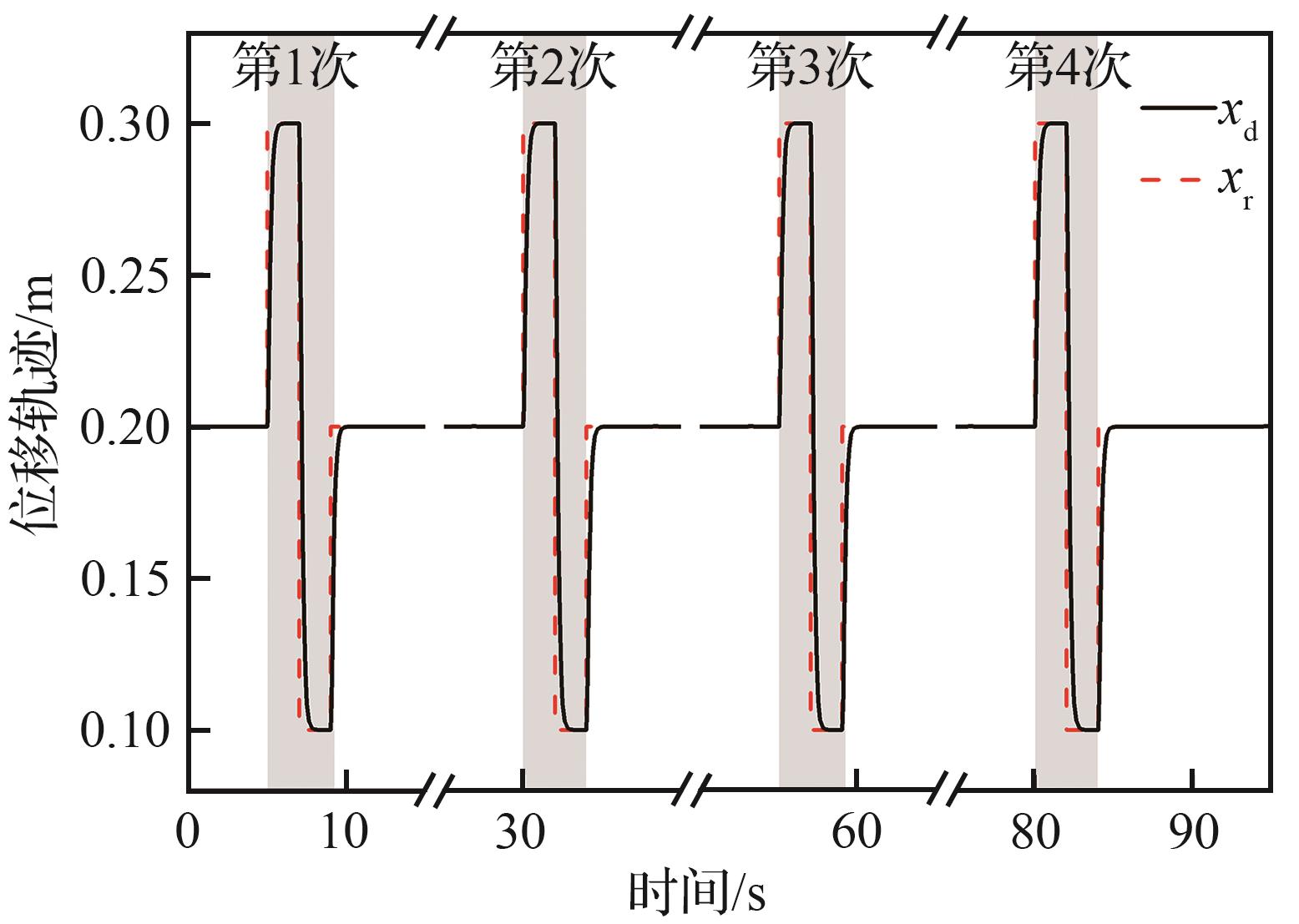
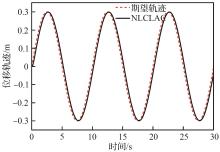
Fig.8
Tracking trajectory of hydraulic cylinder sinusoidal dynamic displacement
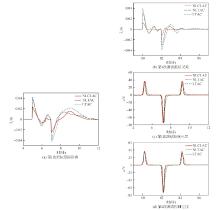
Fig.9
Comparisons of tracking error displacement x˜1 and control voltage u

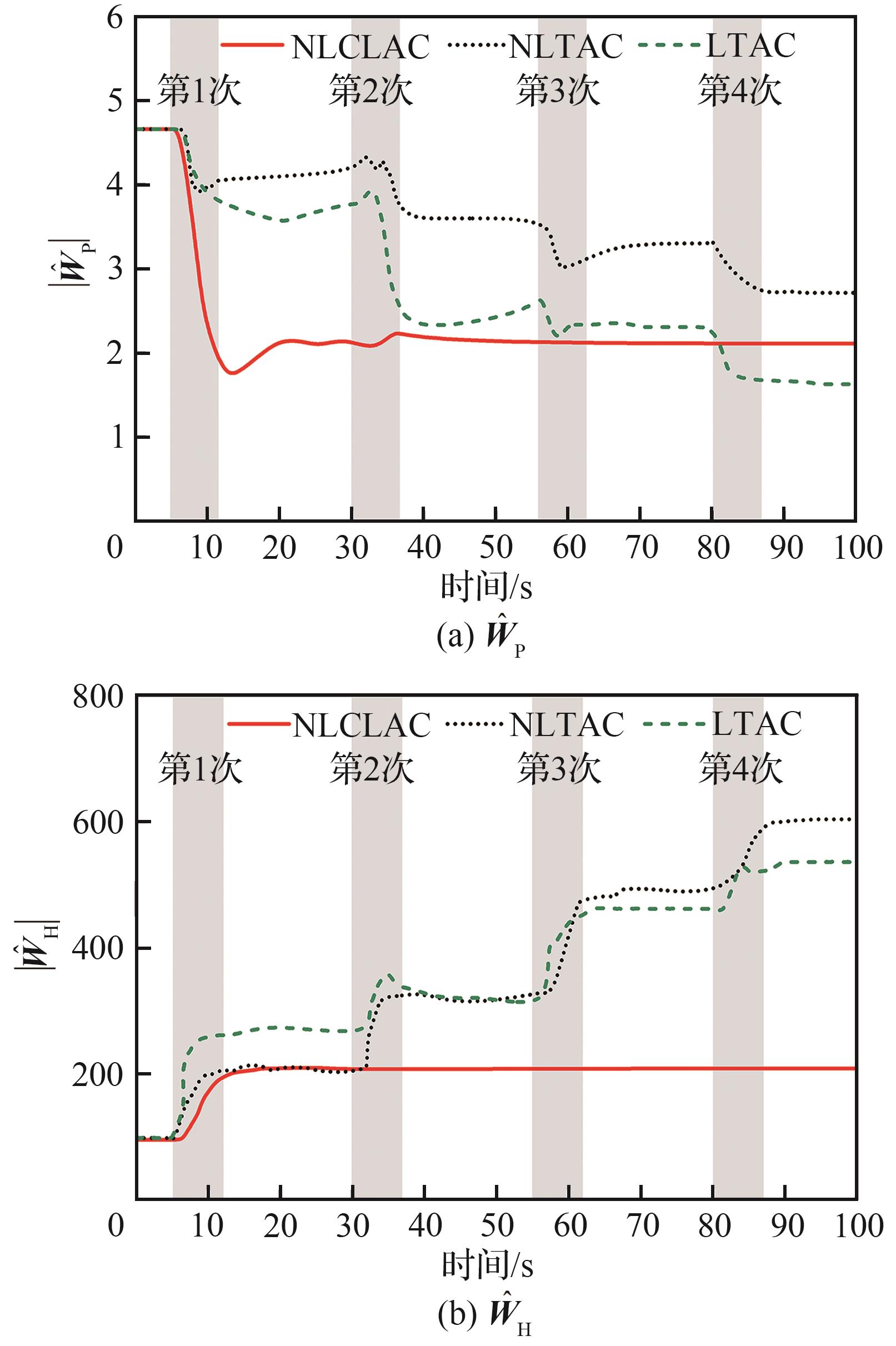
Fig.10
Controller weights comparisons of three controllers
| 1 | ALLE N, HIREMATH S S, MAKARAM S, et al. Review on electro hydrostatic actuator for flight control[J]. International Journal of Fluid Power, 2016, 17(2): 125-145. |
| 2 | 康荣杰, 焦宗夏, Jean Charles Mare,等. 电动静液作动器非线性框图建模与鲁棒控制方法[J]. 航空学报, 2009, 30(3): 518-525. |
| KANG R J, JIAO Z X, MARE J C, et al. Nonlinear block diagram model and robust control of electro-hydrostatic actuator[J]. Acta Aeronautica et Astronautica Sinica, 2009, 30(3): 518-525 (in Chinese). | |
| 3 | YAO J Y, DENG W X. Active disturbance rejection adaptive control of hydraulic servo systems[J]. IEEE Transactions on Industrial Electronics, 2017, 64(10): 8023-8032. |
| 4 | KIM W, WON D. Nonlinear position control with nonlinear coordinate transformation using only position measurement for single-rod electro-hydrostatic actuator[J]. Mathematics, 2020, 8(8): 1273. |
| 5 | YAO J Y, JIAO Z X, MA D W. Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping[J]. IEEE Transactions on Industrial Electronics, 2014, 61(11): 6285-6293. |
| 6 | 彭辉, 王军政, 沈伟, 等. 带补偿因子的双模糊控制在电液伺服阀控非对称缸系统上的应用研究[J]. 机械工程学报, 2017, 53(24): 184-192. |
| PENG H, WANG J Z, SHEN W, et al. Double fuzzy control with compensating factor for electronic-hydraulic servovalve-controlled system[J]. Journal of Mechanical Engineering, 2017, 53(24): 184-192 (in Chinese). | |
| 7 | 曾乐, 谭建平, 许文斌, 等. 阀控非对称缸系统神经网络多逆模型切换控制研究[J]. 西安交通大学学报, 2019, 53(12): 153-160. |
| ZENG L, TAN J P, XU W B, et al. Multi-inverse model switching control for valve-controlled asymmetric cylinder systems based on neural network [J]. Journal of Xi’an Jiaotong University, 2019, 53(12): 153-160 (in Chinese). | |
| 8 | GUO K, PAN Y, YU H. Composite learning robot control with friction compensation: a neural network-based approach[J]. IEEE Transactions on Industrial Electronics, 2018, 66(10): 7841-7851. |
| 9 | JIN X L, ZHU S Q, ZHU X Q, et al. Single-input adaptive fuzzy sliding mode control of the lower extremity exoskeleton based on human–robot interaction[J]. Advances in Mechanical Engineering, 2017, 9(2): 4345-4352. |
| 10 | LEE S S, PARK J K. Design of power system stabilizer using observer/sliding mode, observer/sliding mode-model following and H∞/sliding mode controllers for small-signal stability study[J]. International Journal of Electrical Power & Energy Systems, 1998, 20(8): 543-553. |
| 11 | KADDISSI C, KENNE J P, SAAD M. Identification and real-time control of an electrohydraulic servo system based on nonlinear backstepping[J]. IEEE/ASME Transactions on Mechatronics, 2007, 12(1): 12-22. |
| 12 | 刘乐, 蔺明浩, 李晓刚, 等. 基于模糊干扰观测器的电液伺服位置系统自适应反步控制[J]. 电机与控制学报, 2019, 23(12): 143-150, 158. |
| LIU L, LIN M H, LI X G, et al. Adaptive backstepping control for the electro-hydraulic servo position system based on fuzzy disturbance observers[J]. Electric Machines and Control, 2019, 23(12): 143-150, 158 (in Chinese). | |
| 13 | HELIAN B, CHEN Z, YAO B. Precision motion control of a servomotor-pump direct-drive electrohydraulic system with a nonlinear pump flow mapping[J]. IEEE Transactions on Industrial Electronics, 2019, 67(10): 8638-8648. |
| 14 | GUO K, WEI J, TIAN Q. Disturbance observer based position tracking of electro-hydraulic actuator[J]. Journal of Central South University, 2015, 22(6): 2158-2165. |
| 15 | GUO K, XU Y, LI J. Thrust force allocation method for shield tunneling machines under complex load conditions[J]. Automation in Construction, 2018, 96: 141-147. |
| 16 | 那靖, 郑昂, 黄英博. 非线性严格反馈系统自适应非反步输出反馈控制[J]. 控制与决策, 2022, 37(9): 2425-2432. |
| NA J, ZHENG A, HUANG Y B. Adaptive non-backstepping output-feedback control of nonlinear strict-feedback systems[J]. Control and Decision, 2022, 37(9): 2425-2432 (in Chinese). | |
| 17 | YAO B, BU F, REEDY J, et al. Adaptive robust motion control of single-rod hydraulic actuators: theory and experiments[J]. IEEE/ASME Transactions on Mechatronics, 2000, 5(1): 79-91. |
| 18 | 王宣银, 李强, 程佳. 液压Stewart平台基于工作空间综合偏差的同步控制[J]. 航空学报, 2009, 30(4): 719-725. |
| WANG X Y, LI Q, CHENG J. Synchronous tracking control for hydraulic Stewart platform based on combination tracking errors in operation workspace[J]. Acta Aeronautica et Astronautica Sinica, 2009, 30(4): 719-725 (in Chinese). | |
| 19 | LIU H M, WANG S P, OUYANG P C. Fault diagnosis in a hydraulic position servo system using RBF neural network[J]. Chinese Journal of Aeronautics, 2006, 19(4): 346-353. |
| 20 | NA J, YANG J, WU X, et al. Robust adaptive parameter estimation of sinusoidal signals[J]. Automatica, 2015, 53: 376-384. |
| 21 | WANG J, LI R, ZHANG G, et al. Continuous sliding mode iterative learning control for output constrained MIMO nonlinear systems[J]. Information Sciences, 2020, 67(2):1242-1253. |
| 22 | 施卉辉, 陈强. 一类不确定系统的自适应滑模迭代学习控制[J]. 控制理论与应用, 2023, 40(7): 1162-1171. |
| SHI H H, CHEN Q, et al. Adaptive sliding-mode iterative learning control for a class of uncertain systems[J]. Control Theory & Applications, 2023, 40(7): 1162-1171 (in Chinese). | |
| 23 | SHOU Y, XU B, PU H, et al. Composite learning control of strict-feedback nonlinear system with unknown control gain function[J]. International Journal of Robust and Nonlinear Control, 2023, 33(13): 7793-7810. |
| 24 | GUO K, PAN Y, ZHENG D, et al. Composite learning control of robotic systems: a least squares modulated approach[J]. Automatica, 2020, 111: 108612. |
| 25 | XU B, SUN F C. Composite intelligent learning control of strict-feedback systems with disturbance[J]. IEEE Transactions on Cybernetics, 2018, 48(2): 730-741. |
| 26 | 韩小霞, 谢建, 冯永保, 等. 基于模型信息的电静液作动器降阶线性自抗扰控制[J]. 控制与决策, 2023, 38(3): 681-689. |
| HAN X X, XIE J, FENG Y B, et al. Reduced order linear active disturbance rejection control based on model information of electro-hydrostatic actuator[J]. Control and Decision, 2023, 38(3): 681-689 (in Chinese). | |
| 27 | GUO K, LI M, SHI W, et al. Adaptive tracking control of hydraulic systems with improved parameter convergence[J]. IEEE Transactions on Industrial Electronics, 2021, 69(7): 7140-7150. |
| 28 | GUO K, WEI J, FANG J, et al. Position tracking control of electro-hydraulic single-rod actuator based on an extended disturbance observer[J]. Mechatronics, 2015, 27: 47-56. |
| [1] | Fengying ZHENG, Zhimin SHEN, Yaqin LI, Kaizhao XU, Xinhua WANG. Gain adaptive multi-mode switching control for coaxial high-speed helicopter [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 529088-529088. |
| [2] | Yuqing QIU, Yan LI, Jinxi LANG, Yuxian LIU, Zhong WANG. Robust adaptive attitude control of high-speed helicopters in transition mode [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 529927-529927. |
| [3] | Kai NING, Baolin WU. Event-triggered-based orbit maintenance control for spacecraft subsatellite point control [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(10): 329412-329412. |
| [4] | Leyan FANG, Han MENG, Mingzhe HOU. Iterative learning sliding mode control with precise parameter estimation and its application [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628889-628889. |
| [5] | Guangquan DUAN, Guoping LIU. Adaptive prescribed control of position and attitude of combined spacecraft based on fully actuated system approach [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628837-628837. |
| [6] | Zixiao YANG, Shiyao LI, Chen WEI, Zhan LI, Bo ZHU. Robust control of underactuated 3-DOF helicopter based on lower order disturbance estimator [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 629056-629056. |
| [7] | Xiaoyun SUN, Shufan WU, Qiang SHEN. LMI-based output tracking robust drag-free control with model reference adaptive scheme [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727654-727654. |
| [8] | Runchang HU, Zian WANG, Yongliang CHEN, Dapeng ZHOU, Dapeng YANG, Zheng GONG. Stability augmentation control of thrust-vectored V/STOL aircraft based on L1 adaptive control [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727642-727642. |
| [9] | Chenyang LIU, Dawei WU, Yize GUO, Xinsai LV, Jiani ZHOU, Shuyi SHAO. Robust adaptive attitude control of quadrotor with uncertain strong coupling [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727645-727645. |
| [10] | Yajie MA, Juan WANG, Bin JIANG, Jianye GONG. A fault⁃tolerant control scheme for UAVs-UGVs formation systems [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327216-327216. |
| [11] | Feiyan GUO, Jianhua LIU, Qingdong XIAO, Shihong XIAO, Zhongqi WANG. Monitoring and evaluation of working condition and adaptive control technology for digital assembly tooling [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(16): 427914-427914. |
| [12] | YANG Xiaowei, GE Yaowen, DENG Wenxiang, YAO Jianyong, ZHOU Ning. Active fault-tolerant control for hydraulic actuating cylinders of aeroengine guide vane control mechanisms [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 625464-625464. |
| [13] | WU Baohai, ZHANG Yang, ZHENG Zhiyang, ZHANG Ying, ZHANG Siqi. Review and prospects of feedrate optimization in CNC machining [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(4): 525467-525467. |
| [14] | SHI Zhongjiao, ZHU Huajie, ZHAO Liangyu, LIU Zhijie. Adaptive decoupling control for a class of spinning rockets considering actuator dynamics [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(3): 325068-325068. |
| [15] | WANG Jing, GU Weibo, DOU Liya. Leader-Follower formation control of multiple UAVs with trajectory tracking design [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723758-723758. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 222
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 279
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341