Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (20): 628827-628827.doi: 10.7527/S1000-6893.2023.28827
• special column • Previous Articles
Xin DU, Zhe ZHU, Fangfang HU, Jiangtao HUANG( ), Gang LIU, Sheng ZHANG, Enguang SHAN, Jigang TANG
), Gang LIU, Sheng ZHANG, Enguang SHAN, Jigang TANG
Received:2023-04-06
Revised:2023-05-05
Accepted:2023-06-17
Online:2023-07-10
Published:2023-07-07
Contact:
Jiangtao HUANG
E-mail:hjtcyfx@163.com
CLC Number:
Xin DU, Zhe ZHU, Fangfang HU, Jiangtao HUANG, Gang LIU, Sheng ZHANG, Enguang SHAN, Jigang TANG. Guidance, navigation and control for airborne docking of autonomous aerial refueling[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628827-628827.
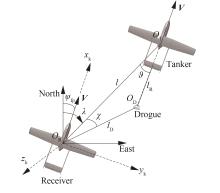
Fig.1
Relative position of tanker-receiver and drogue-receiver
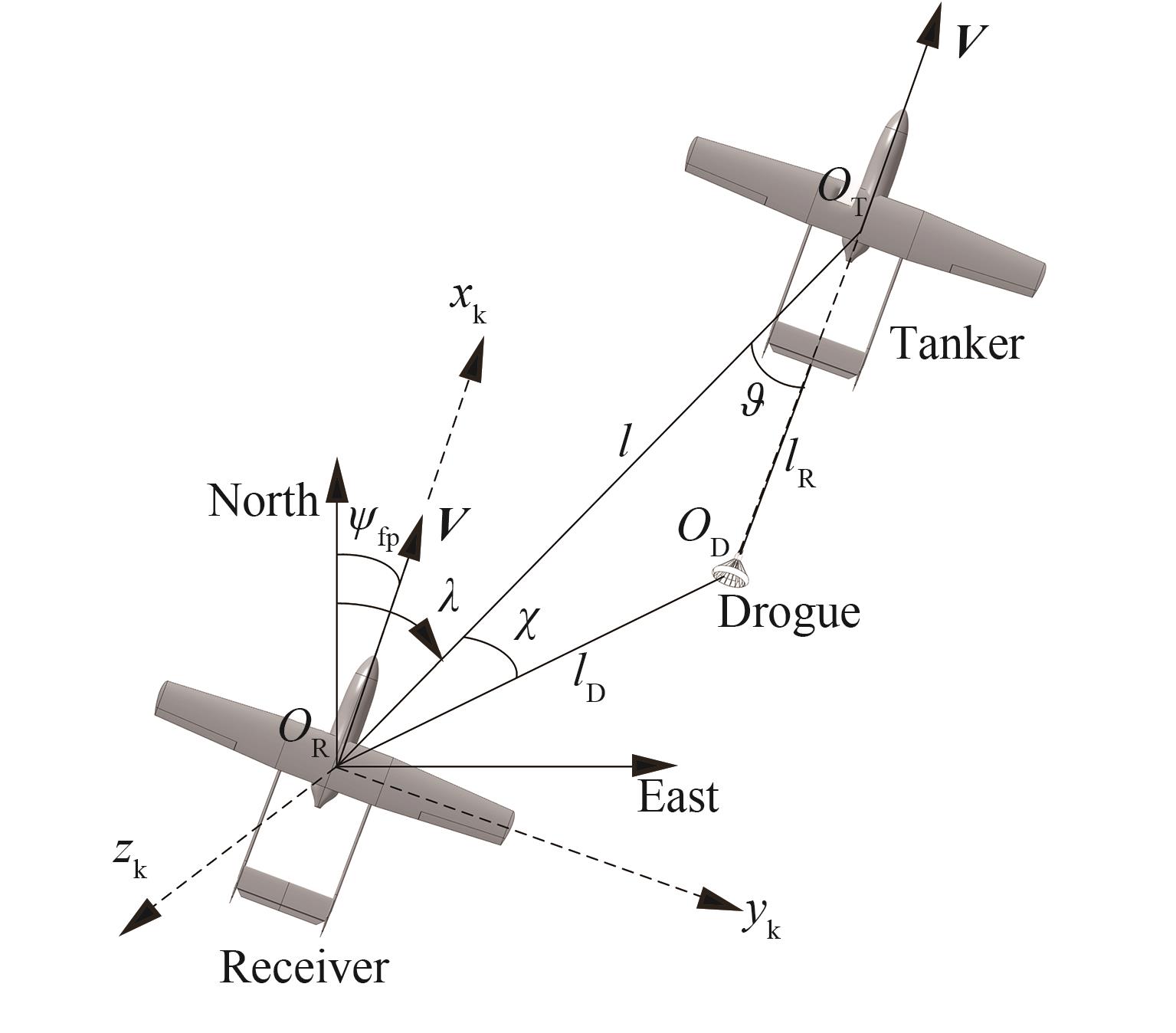
Fig.2
L1 guidance principle
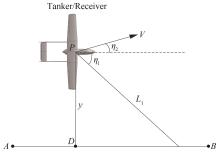
Fig.3
L1 guidance for path tracking
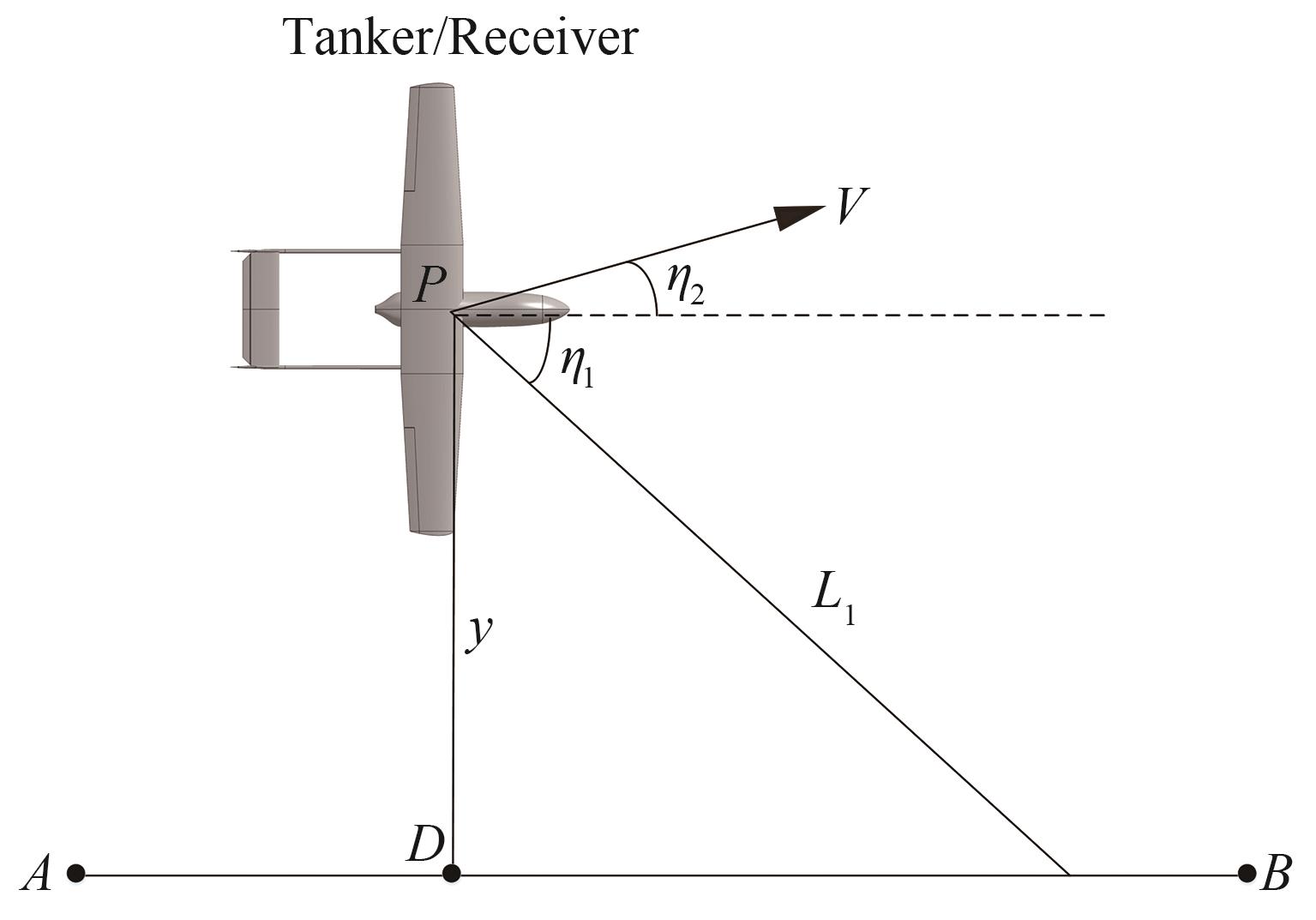
Fig.4
L1 guidance for drogue tracking
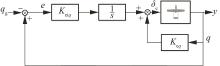
Fig.5
Controller structure of pitch angle loop
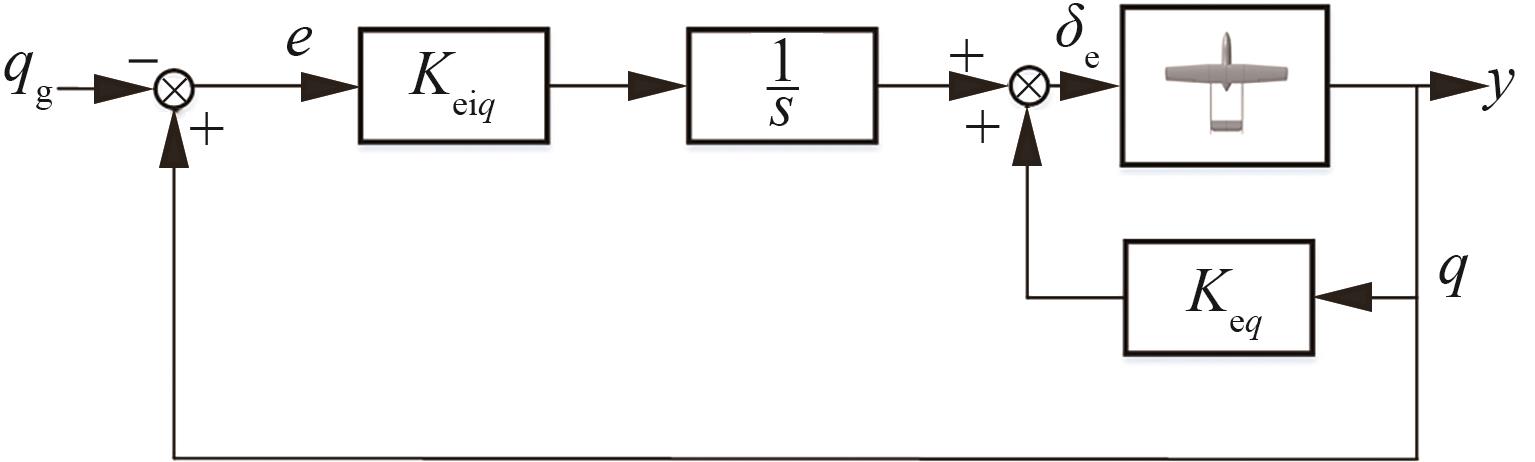

Fig.6
YOLOv4 network structure
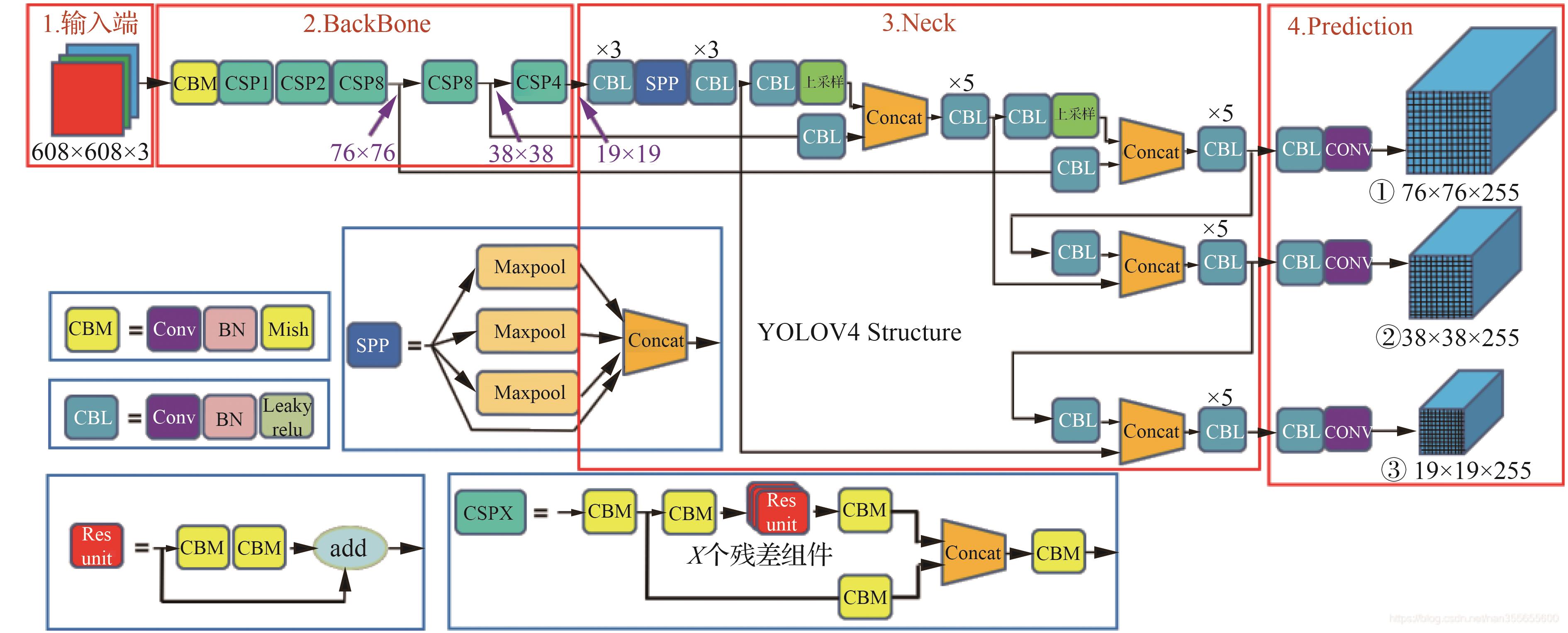

Fig.7
Inter D435i camera and Navida Jeston NX board
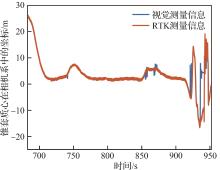
Fig.8
Vision data vs RTK data (x direction)
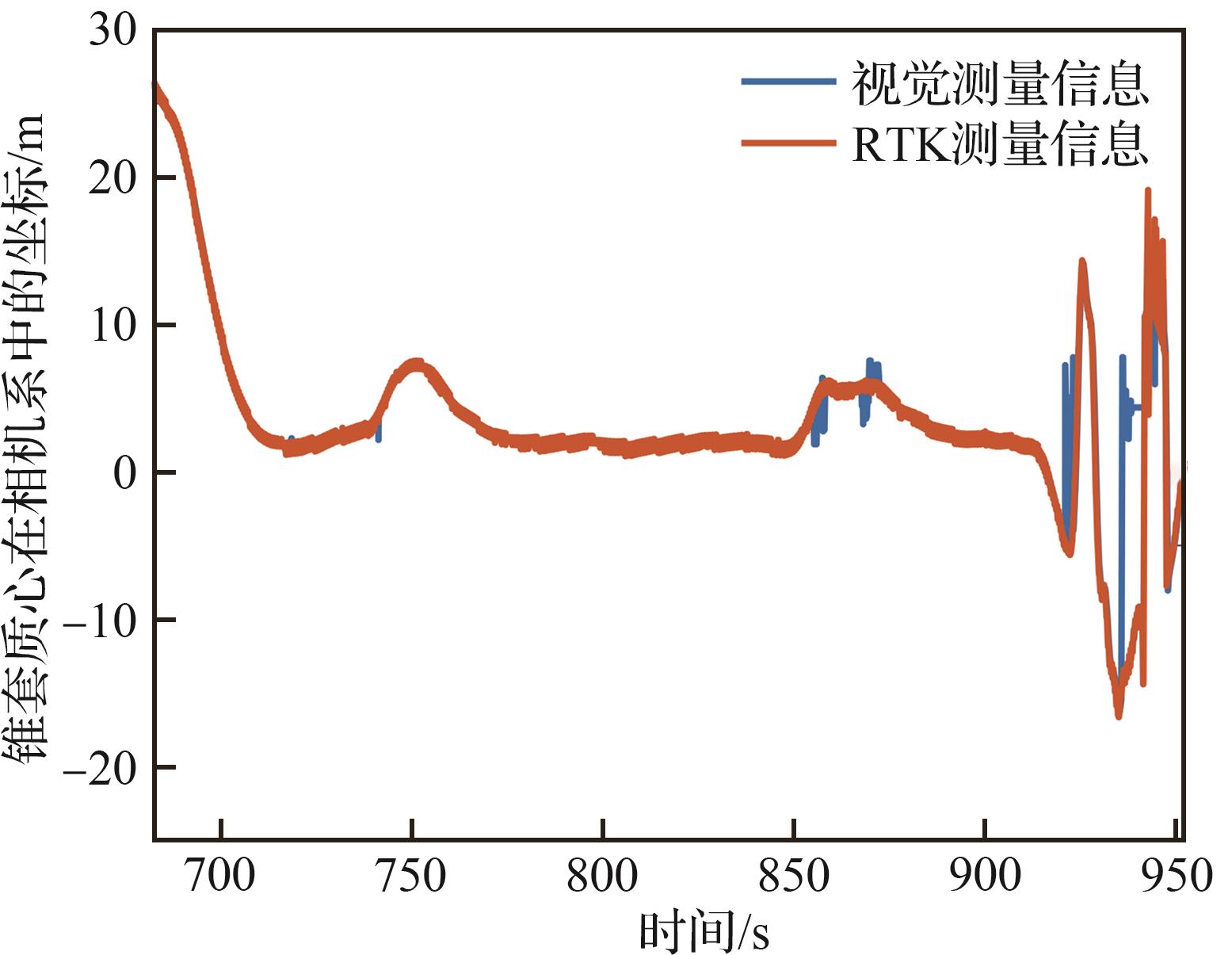
Fig.9
Vision data vs RTK data (y direction)
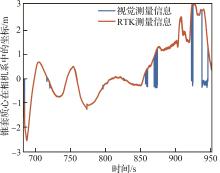
Fig.10
Vision data vs RTK data (z direction)
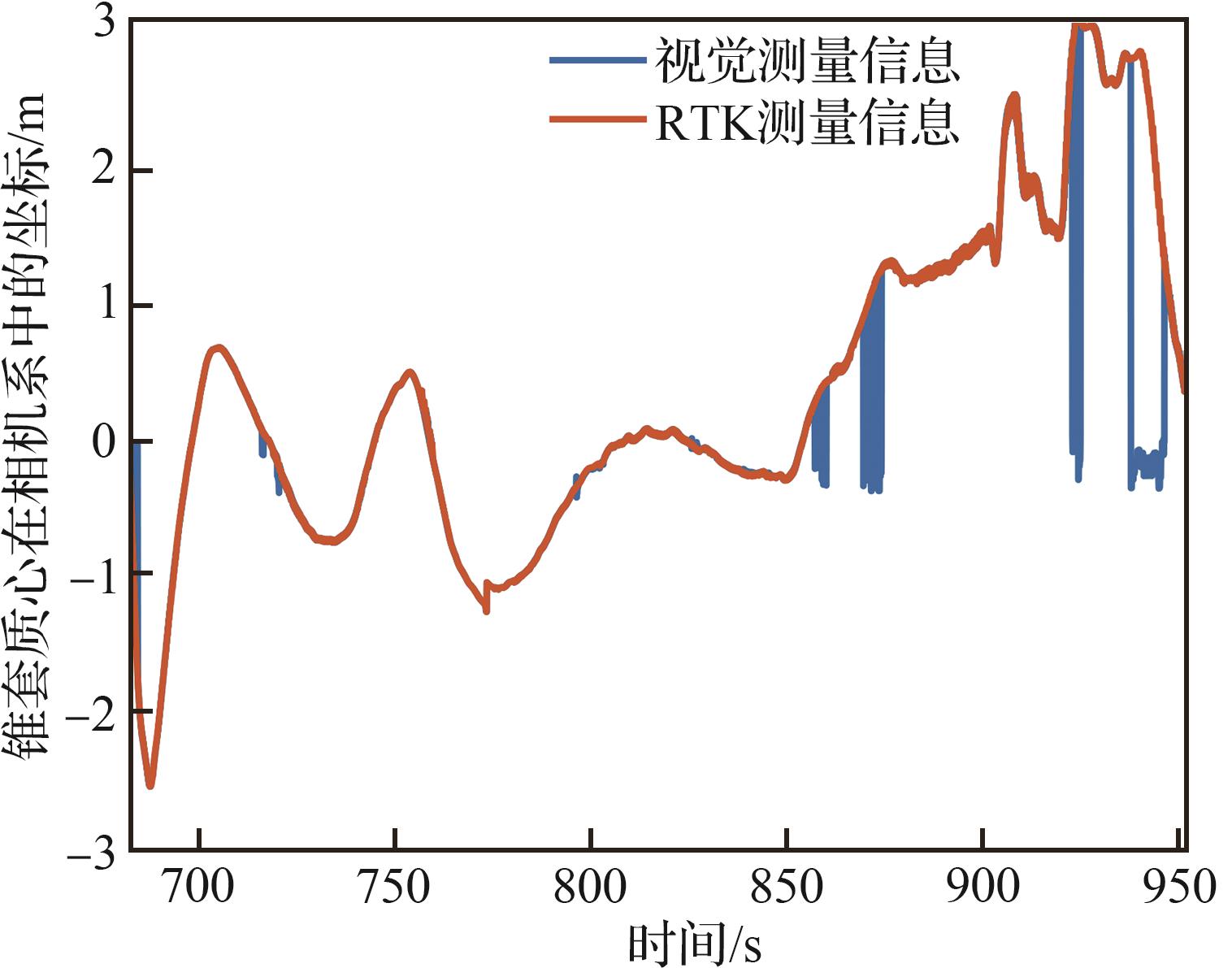

Fig.11
Intended flight path


Fig.12
Testing UAV


Fig.13
Flight control computer and inertial navigation system
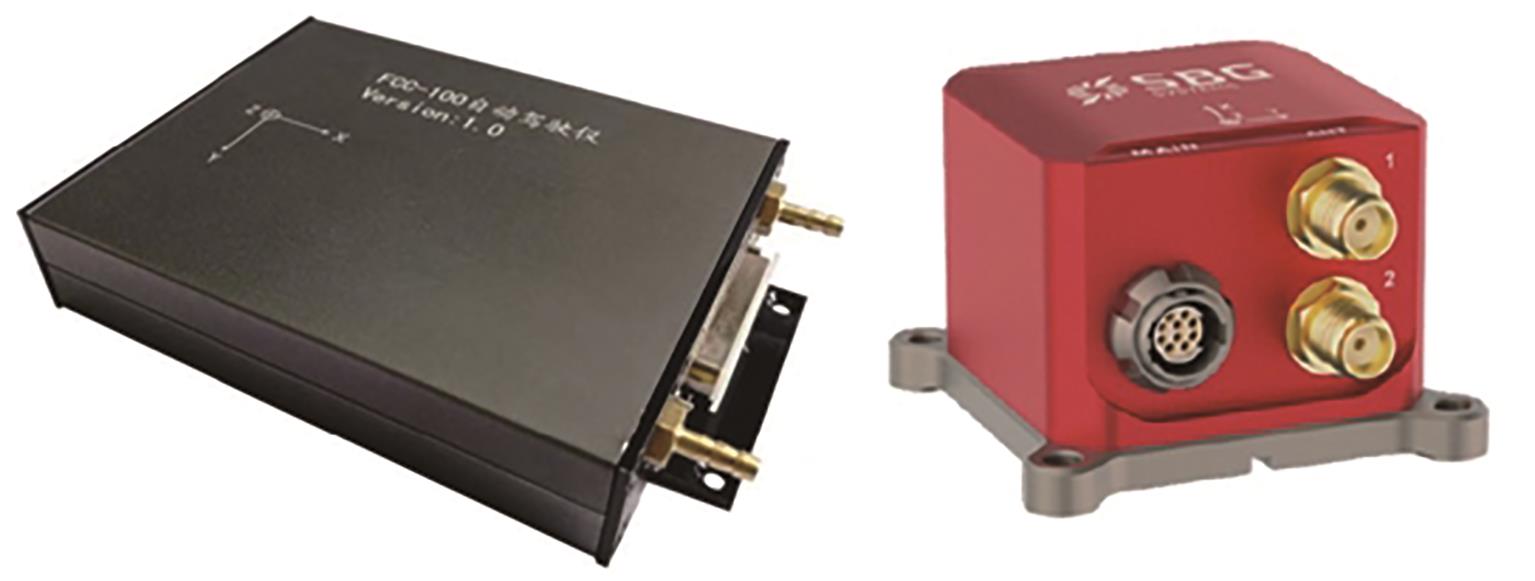
Fig.14
Altitude tracking curves
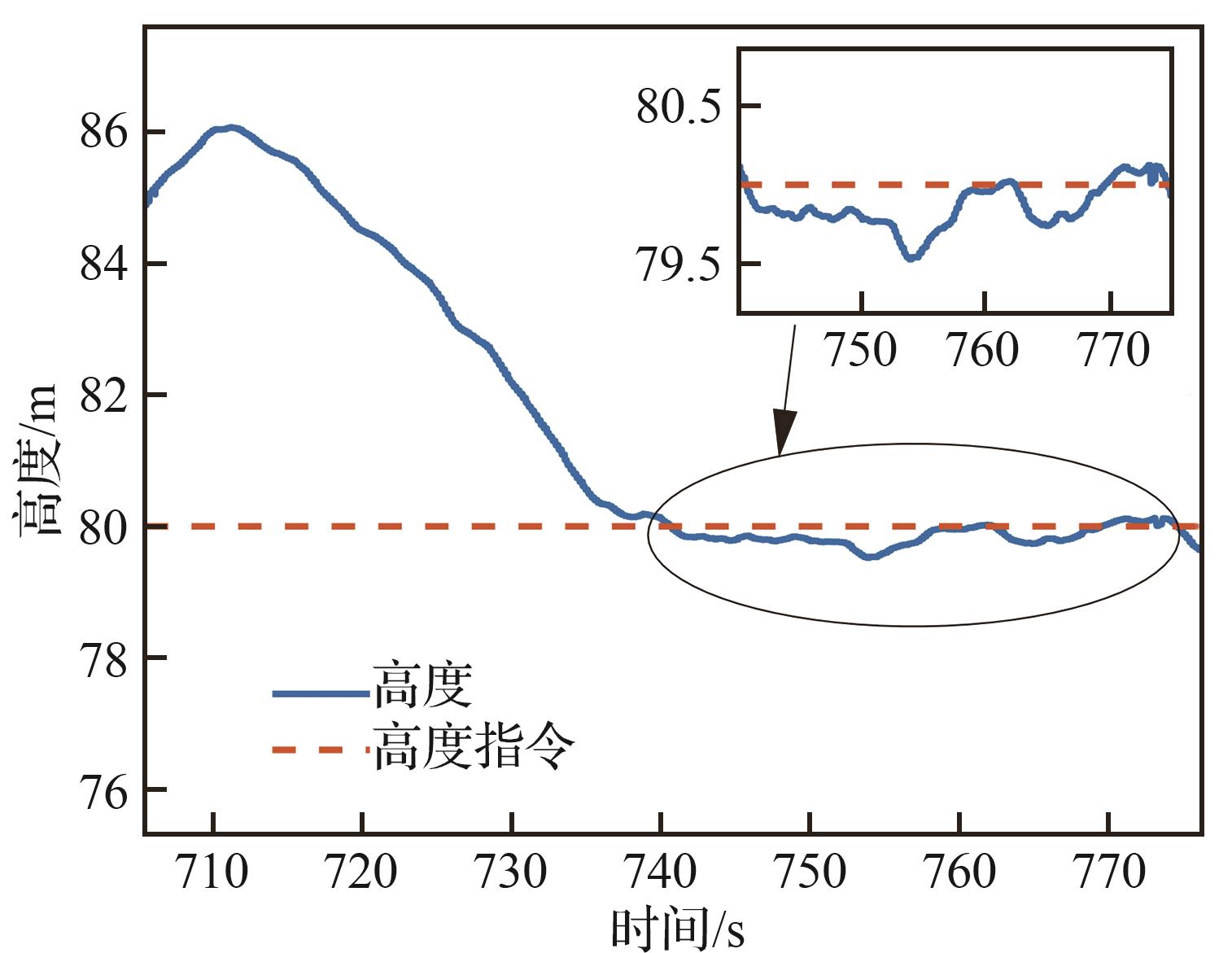
Fig.15
Flight velocity tracking curves
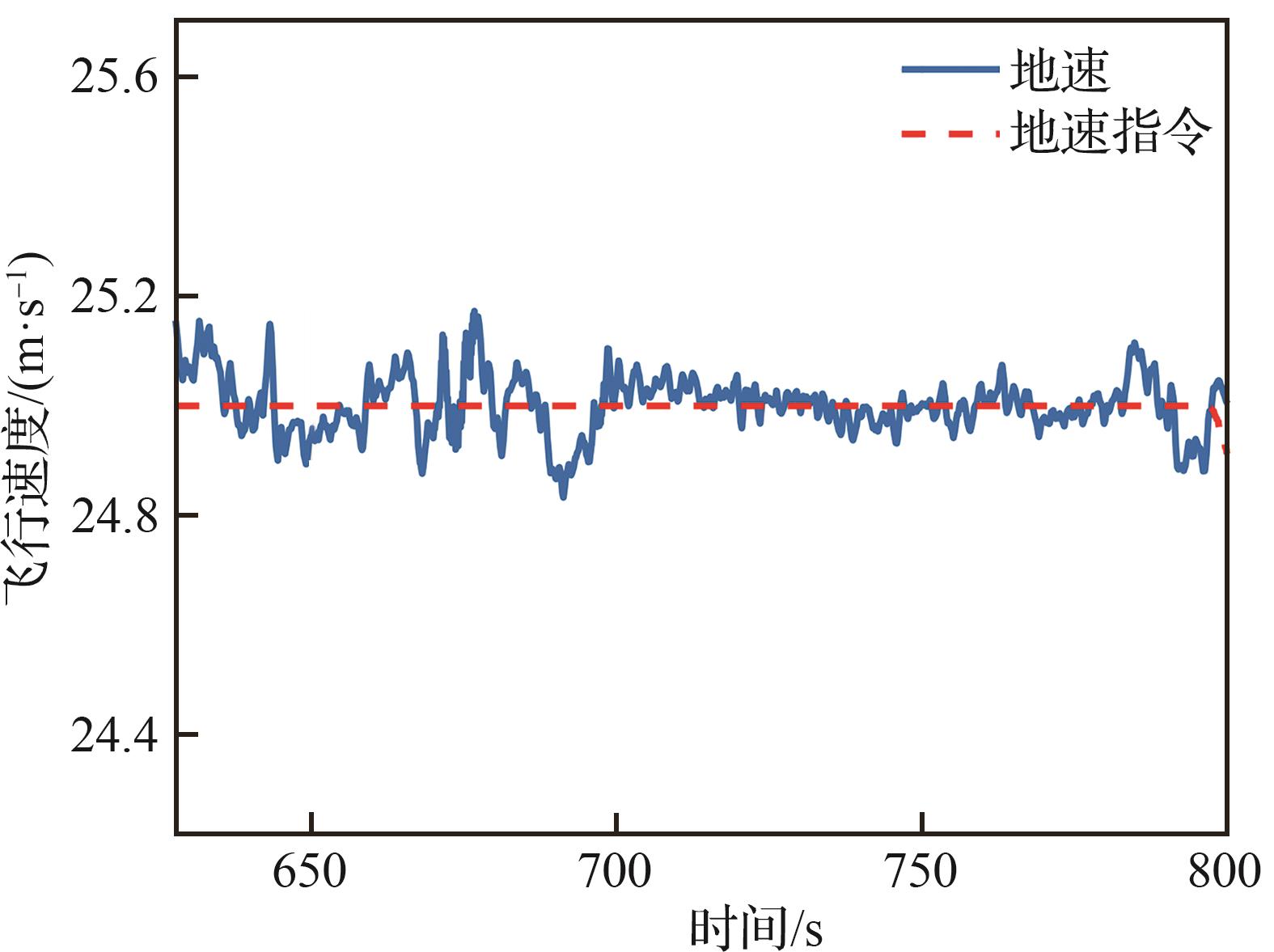
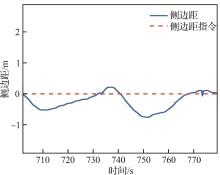
Fig.16
Lateral distance curves of flight path tracking
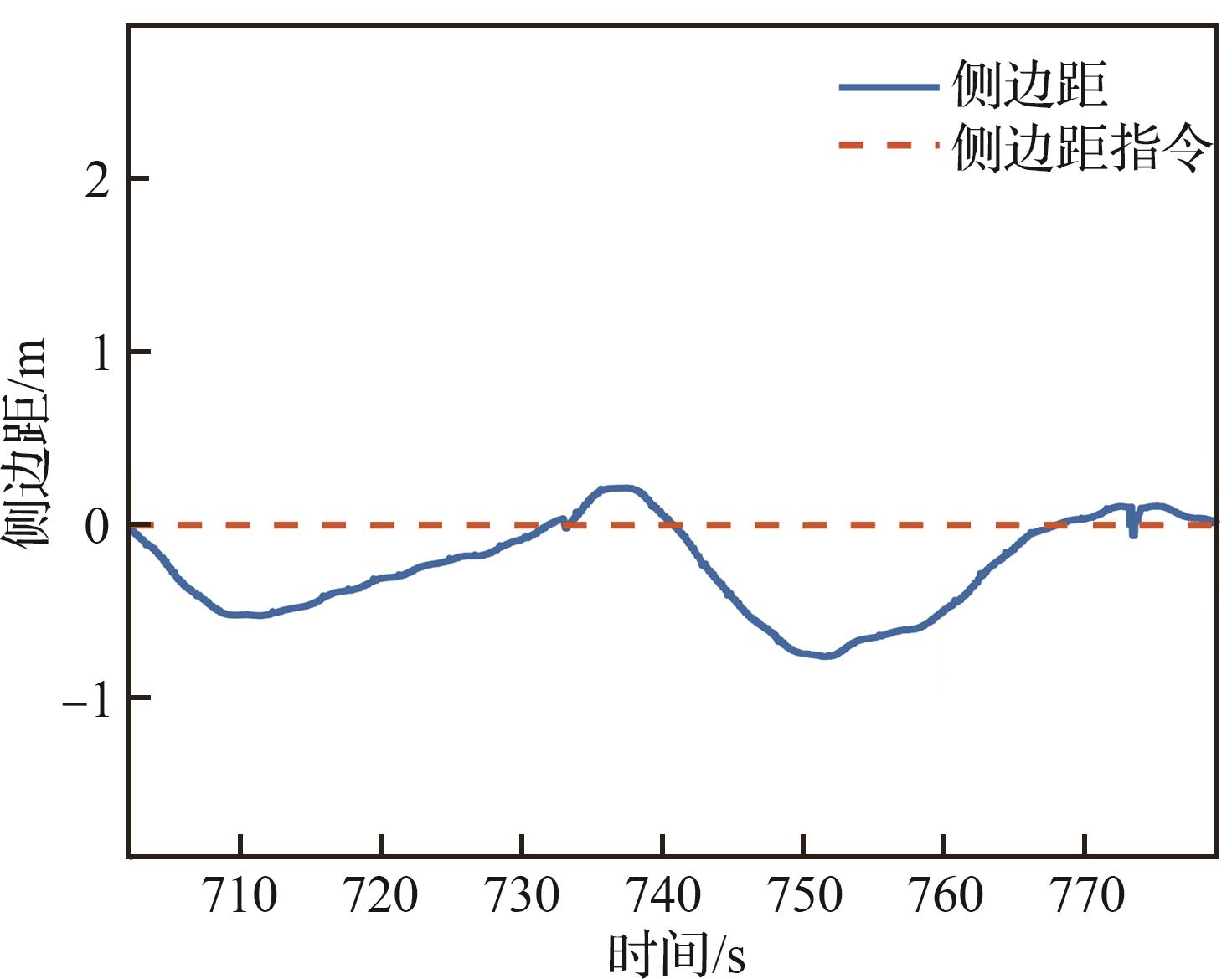
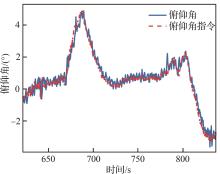
Fig.17
Pitch angle control curves
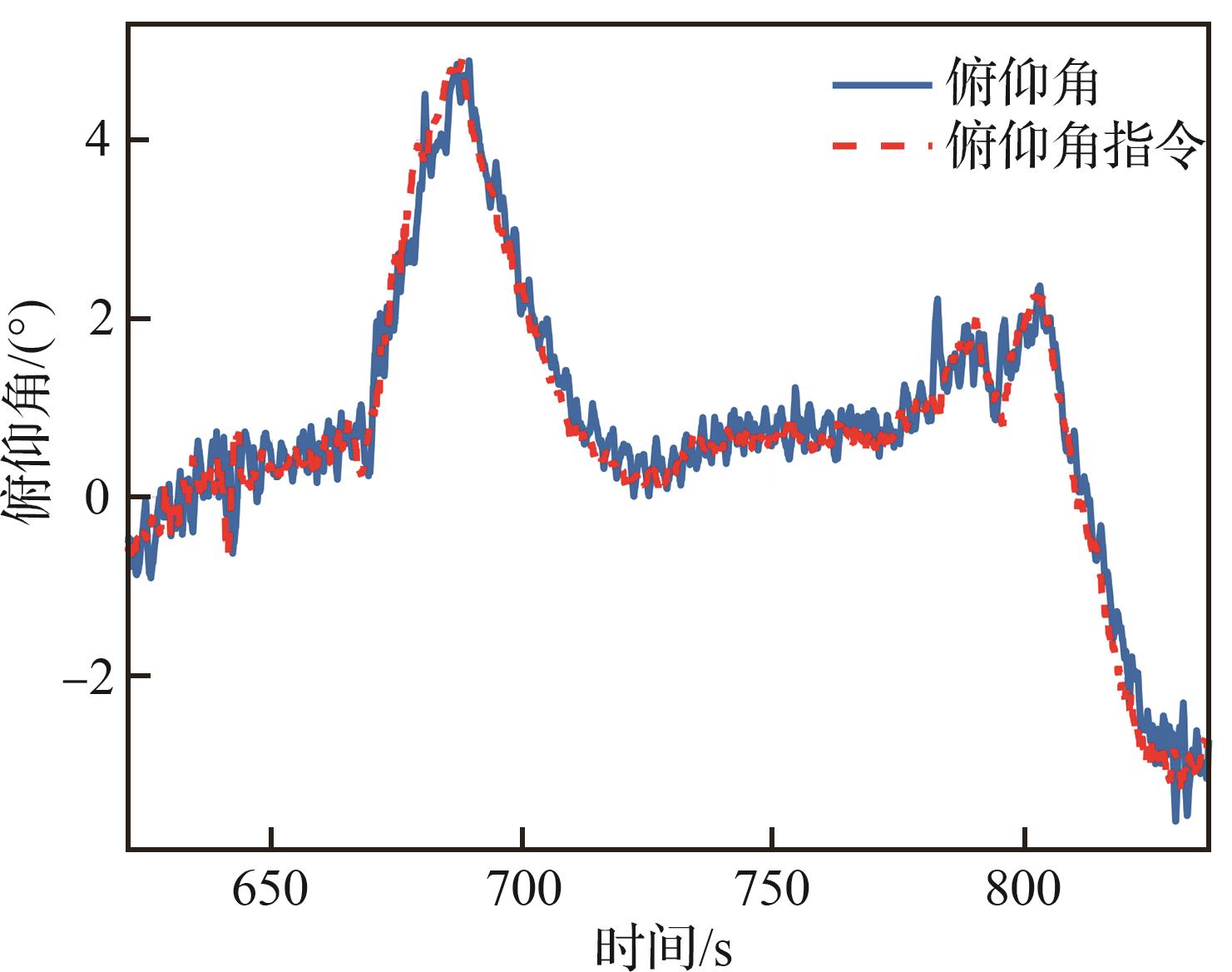
Fig.18
Roll angle control curves
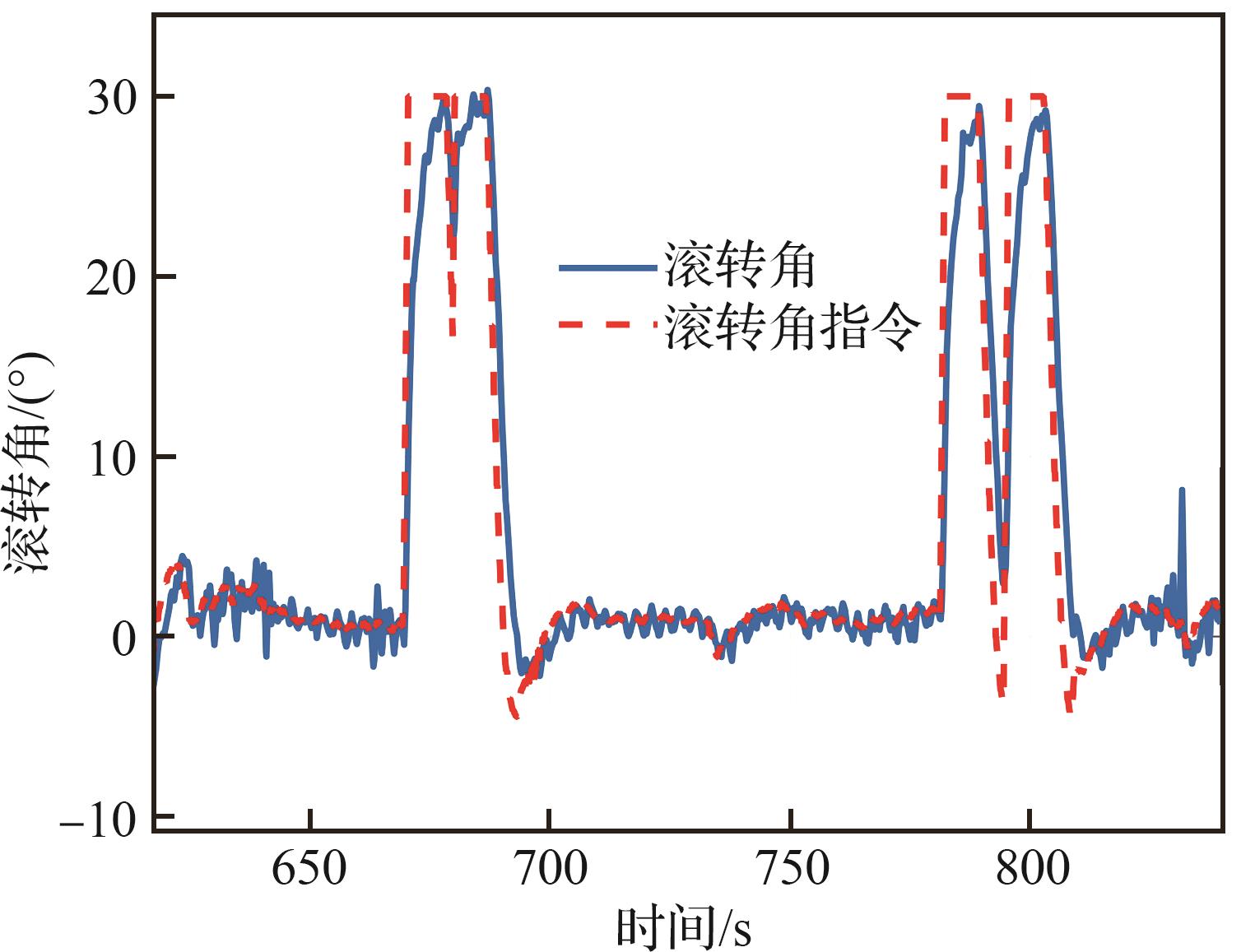
Fig.19
Close formation flight results
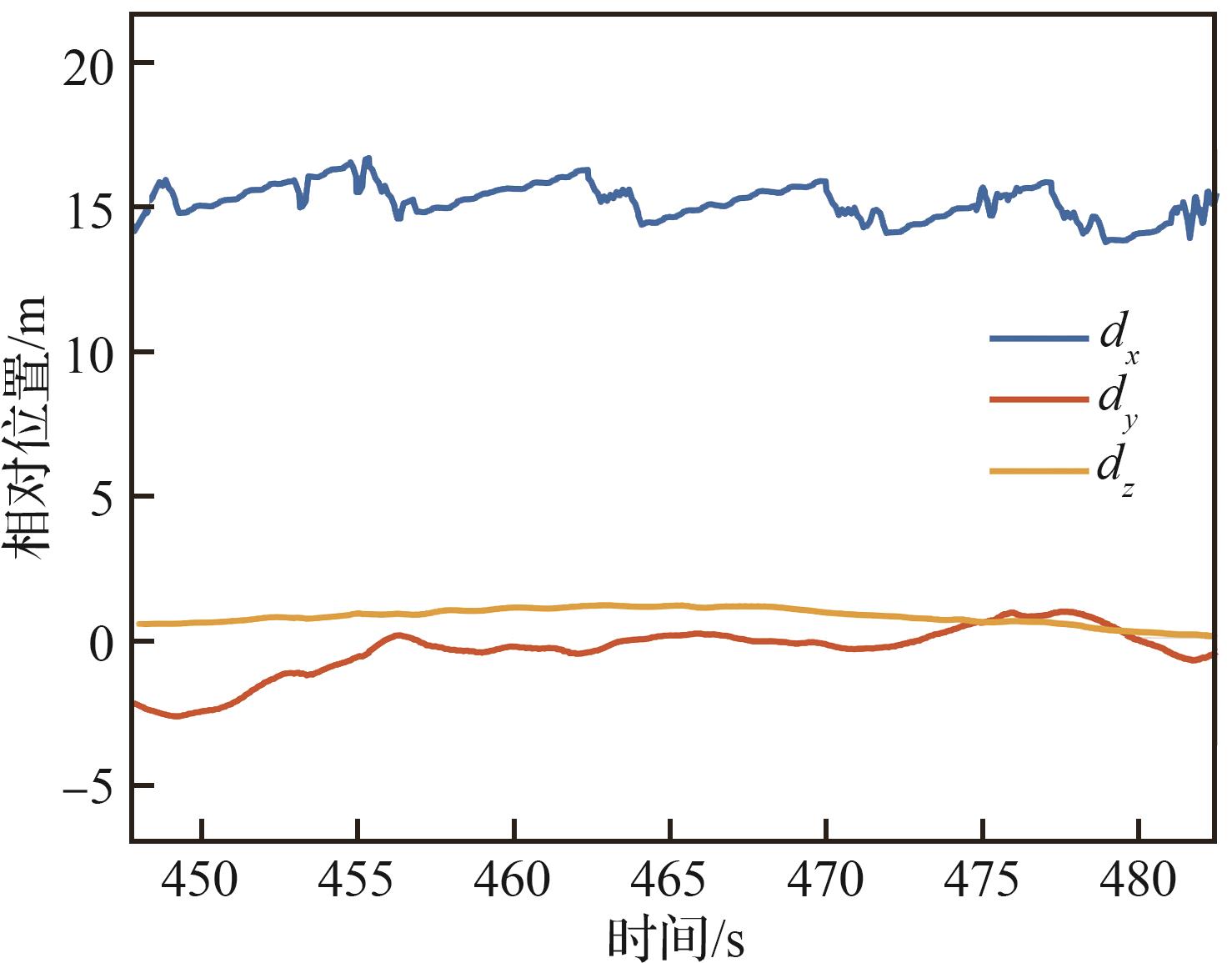
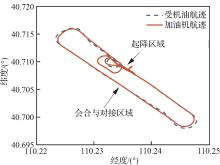
Fig.20
Trajectory of two UAVs (horizontal projected)
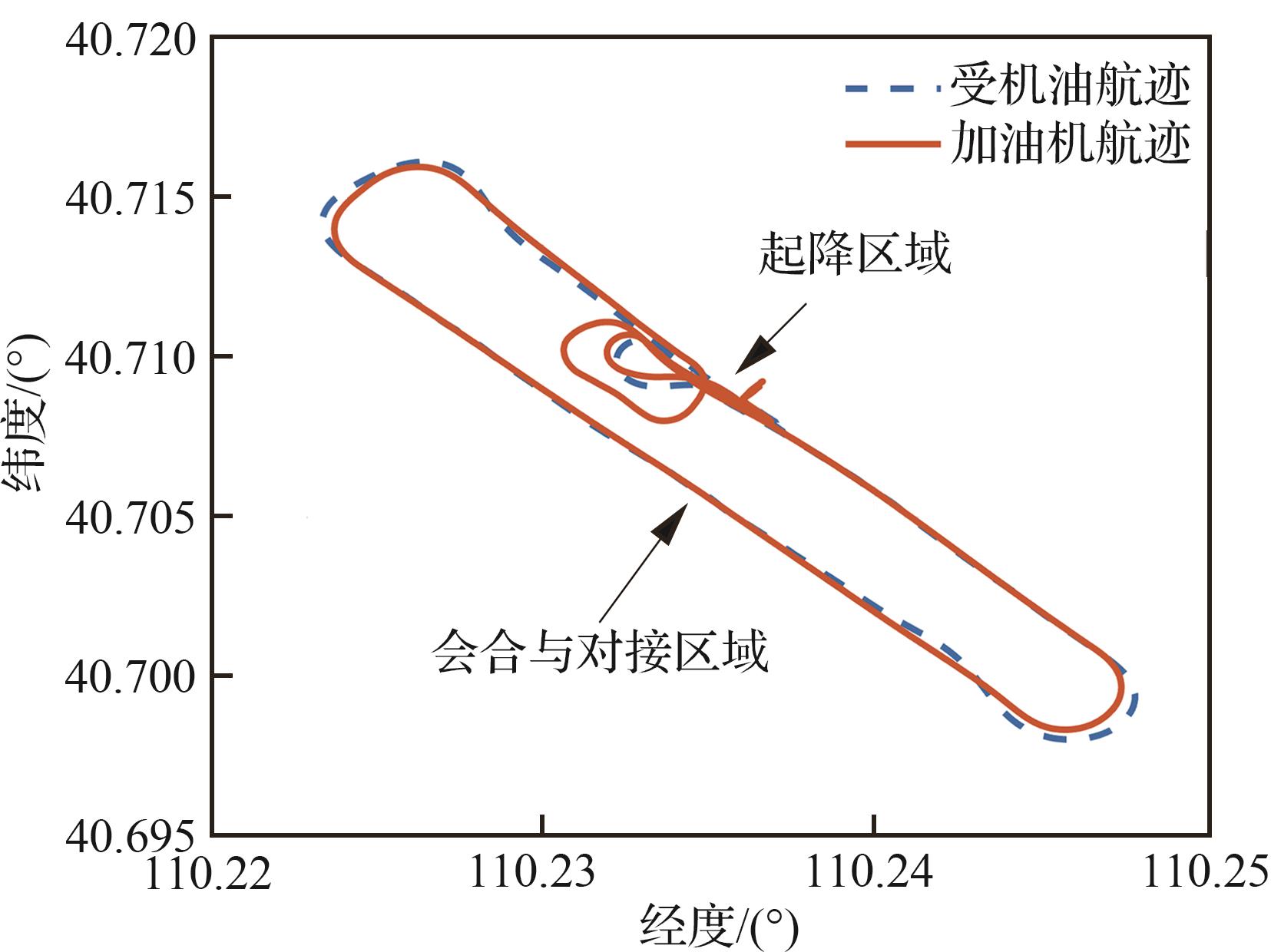
Fig.21
Two consecutive docking attempts
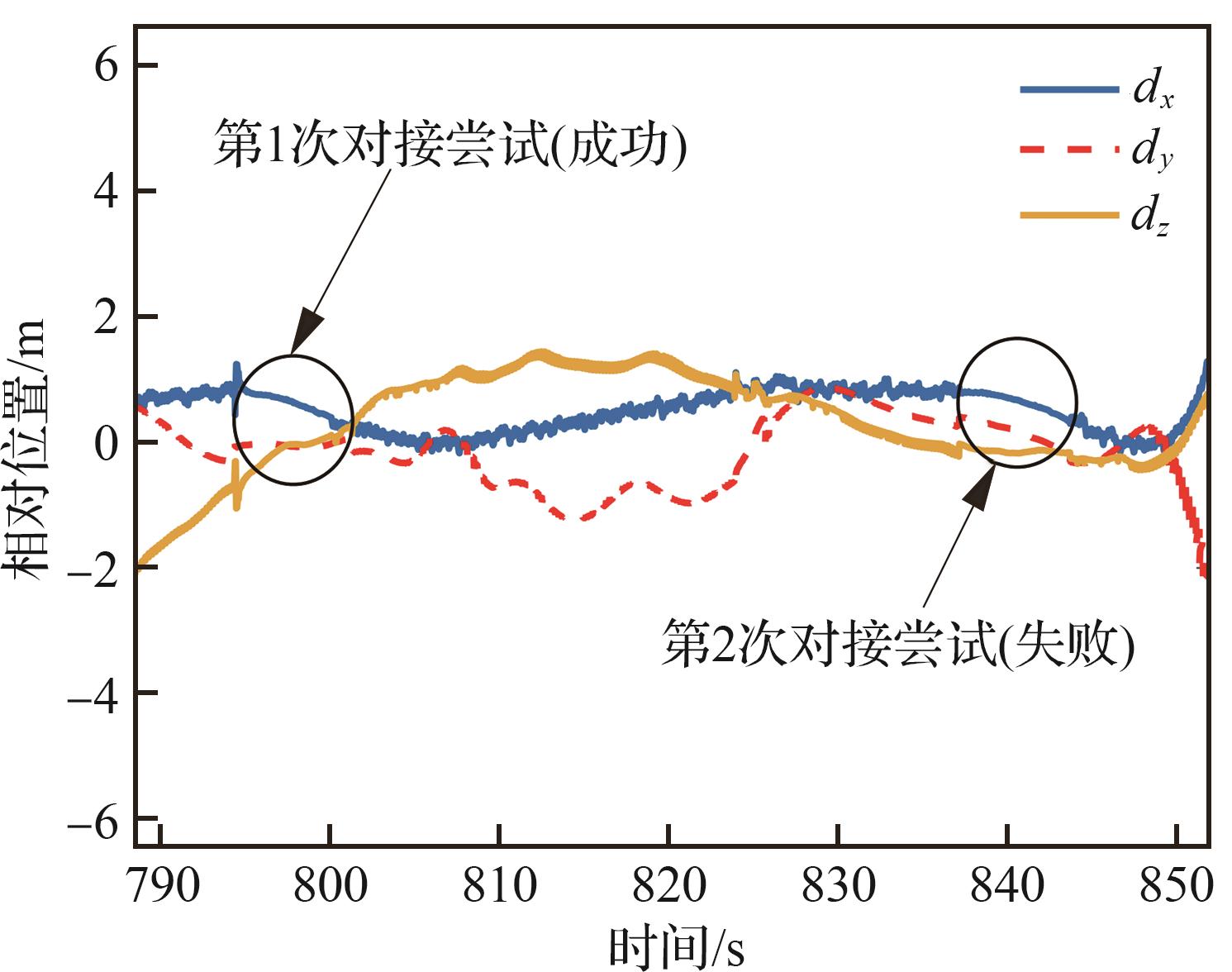
Fig.22
Relative position curves during autonomous docking
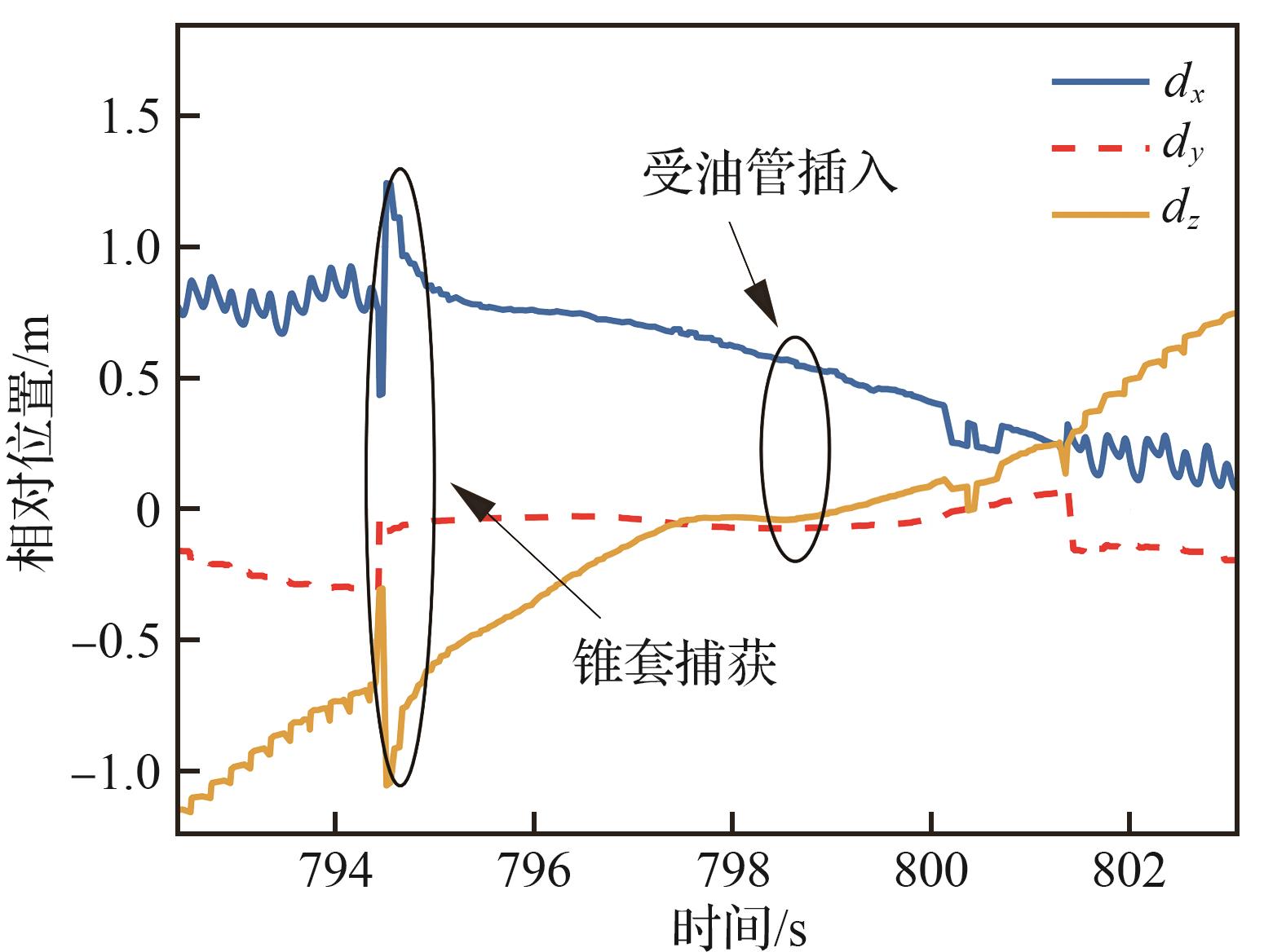
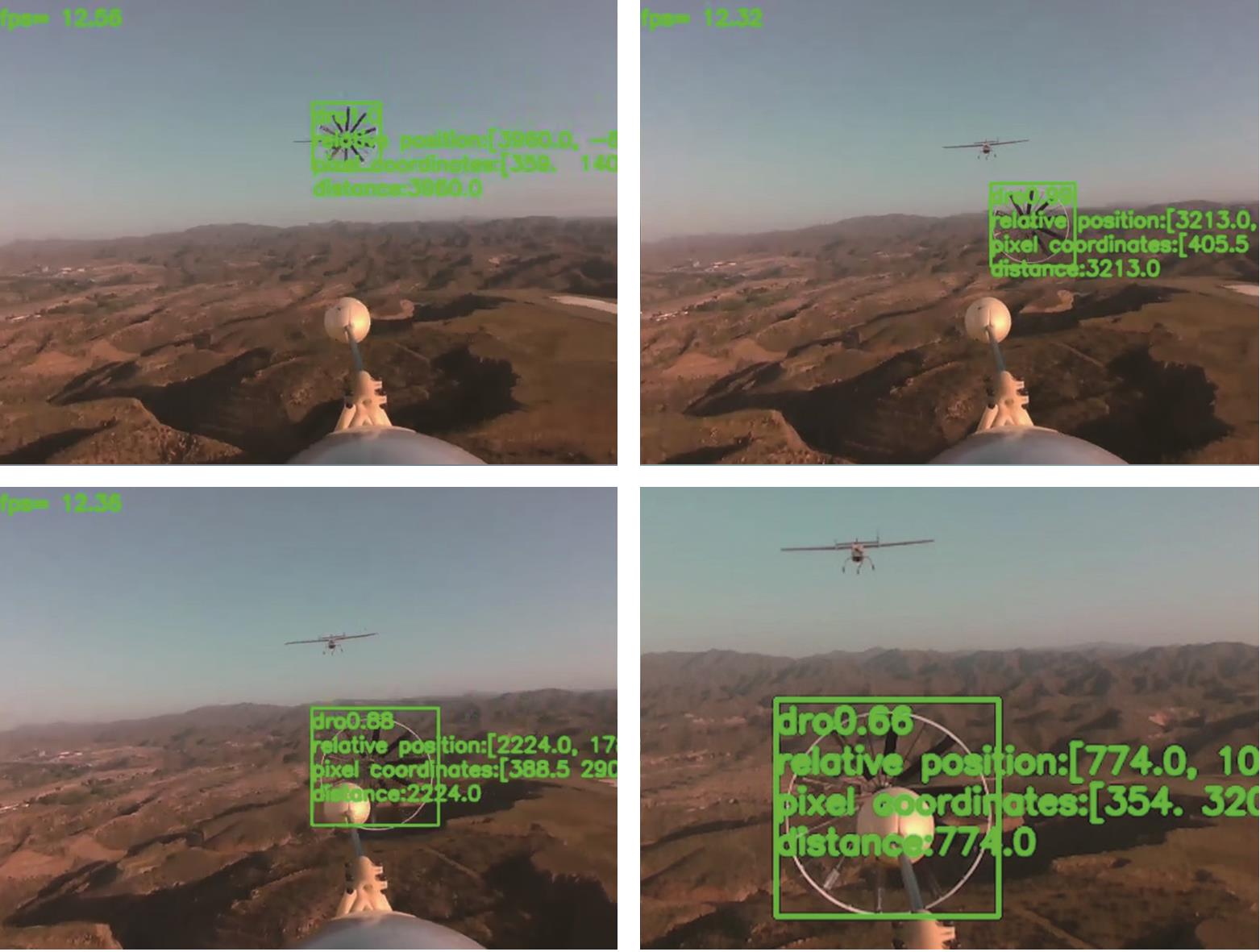
Fig.23
Images of docking process photographed by visual system
| 1 | 全权, 魏子博, 高俊, 等. 软管式自主空中加油对接阶段中的建模与控制综述[J]. 航空学报, 2014, 35(9): 2390-2410. |
| QUAN Q, WEI Z B, GAO J, et al. A survey on modeling and control problems for probe and drogue autonomous aerial refueling at docking stage[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(9): 2390-2410 (in Chinese). | |
| 2 | DANIEL B W. Guidance, navigation and control for UAV close formation flight and airborne docking[D]. Sydney: The University of Sydney, 2015. |
| 3 | 陈冠宇. 无人机空中加油对接引导技术[D]. 南京: 南京航空航天大学, 2019. |
| CHEN G Y. Docking guidance technology for aerial refueling of unmanned aerial vehicle[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019 (in Chinese). | |
| 4 | DIBLEY R, ALLEN M, NABAA N. Autonomous airborne refueling demonstration phase I flight-test results: AIAA-2007-6639[R]. Reston: AIAA, 2007. |
| 5 | HANSEN J, MURRAY J, CAMPOS N. The NASA Dryden AAR project: A flight test approach to an aerial refueling system: AIAA-2004-4939[R]. Reston: AIAA, 2004. |
| 6 | MCMORROW S E, SHERRARD R. Mission information and test systems summary of accomplishments: NASA/TM-2013-216043.2011[R]. Washington, D.C.: NASA, 2013. |
| 7 | SHULGIN D. X-47B unmanned aircraft demonstrates the first autonomous aerial refueling[EB/OL]. (2015-04-23)[2015-04-26]. . |
| 8 | 李大伟, 王宏伦. 自动空中加油阶段加油机尾涡流场建模与仿真[J]. 北京航空航天大学学报, 2010, 36(7): 776-780, 797. |
| LI D W, WANG H L. Wake vortex effect modeling and simulation in automated aerial refueling[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(7): 776-780, 797 (in Chinese). | |
| 9 | 胡孟权, 柳平, 聂鑫, 等. 大气紊流对空中加油软管锥套运动的影响[J]. 飞行力学, 2010, 28(5): 20-23. |
| HU M Q, LIU P, NIE X, et al. Influence of air turbulence on the movement of hose-drogue[J]. Flight Dynamics, 2010, 28(5): 20-23 (in Chinese). | |
| 10 | 程钊, 于方圆. 受油机扰动特性的建模与仿真[J]. 兵工自动化, 2013, 32(10): 8-11. |
| CHENG Z, YU F Y. Modeling and simulation of receiver aircraft disturbance characteristics[J]. Ordnance Industry Automation, 2013, 32(10): 8-11 (in Chinese). | |
| 11 | 陈乐乐. 软式空中加油气动相容性及动态特性研究[D]. 南京: 南京航空航天大学, 2017. |
| CHEN L L. Research on aerodynamic compatibility and dynamic characteristics of hose-drogue aerial refuling system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017 (in Chinese). | |
| 12 | 徐坚, 张晓非. 软式空中加油头波效应建模与仿真[J]. 飞行力学, 2019, 37(5): 40-44. |
| XU J, ZHANG X F. Dynamic modeling and simulation of bow wave effect in hose-drogue aerial refueling system[J]. Flight Dynamics, 2019, 37(5): 40-44 (in Chinese). | |
| 13 | 王健, 董新民, 徐跃鉴, 等. 软式空中加油受油机头波数值仿真分析[J]. 飞行力学, 2016, 34(1): 54-58. |
| WANG J, DONG X M, XU Y J, et al. Simulation and analysis of the bow wave effect of the receiver in hose-drogue aerial refueling[J]. Flight Dynamics, 2016, 34(1): 54-58 (in Chinese). | |
| 14 | 刘海洲. 考虑头波效应影响的自主空中加油对接技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| LIU H Z. Reseach on autonomous aerial refueling docking under bow wave[D]. Harbin: Harbin Institute of Technology, 2020 (in Chinese). | |
| 15 | 张博连. 无人机自主空中加油对接控制技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| ZHANG B L. Docking control method for autonomous aerial refueling for unmanned aerial vehicles[D]. Harbin: Harbin Institute of Technology, 2018 (in Chinese). | |
| 16 | 宋海军. 无人机空中加油会合阶段制导控制研究[D]. 南京: 南京航空航天大学, 2014. |
| SONG H J. Research on guidance and control technology of the rendezvous for autonomous aerial refueling of unmanned aerial vehicle[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014 (in Chinese). | |
| 17 | 吴腾飞. 无人机软式自主空中加油视觉导航技术研究[D]. 南京: 南京航空航天大学, 2015. |
| WU T F. Vision-based navigation for UAV probe and drogue autonomous aerial refueling[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2015 (in Chinese). | |
| 18 | 慕春棣, 李波睿. 基于视觉的自动空中加油技术[J]. 清华大学学报(自然科学版), 2012, 52(5): 670-676, 681. |
| MU C D, LI B R. Vision-based autonomous aerial refueling[J]. Journal of Tsinghua University (Science and Technology), 2012, 52(5): 670-676, 681 (in Chinese). | |
| 19 | 解洪文, 王宏伦. 基于双目视觉的自动空中加油近距导航方法[J]. 北京航空航天大学学报, 2011, 37(2): 206-209. |
| XIE H W, WANG H L. Binocular vision-based short-range navigation method for autonomous aerial refueling[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(2): 206-209 (in Chinese). | |
| 20 | 郭军, 董新民, 徐跃鉴, 等. 无人机空中加油自主会合控制器设计[J]. 控制与决策, 2010, 25(4): 567-571. |
| GUO J, DONG X M, XU Y J, et al. Design of UAV autonomous controller for rendezvous in aerial refueling[J]. Control and Decision, 2010, 25(4): 567-571 (in Chinese). | |
| 21 | 盖文东, 王宏伦, 李大伟. 基于自适应动态逆的自动空中加油轨迹跟踪[J]. 北京航空航天大学学报, 2012, 38(5): 585-590. |
| GAI W D, WANG H L, LI D W. Trajectory tracking for automated aerial refueling based on adaptive dynamic inversion[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(5): 585-590 (in Chinese). | |
| 22 | KHANSARI-ZADEH S M, SAGHAFI F. Vision-based navigation in autonomous close proximity operations using neural networks[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 864-883. |
| 23 | HOWARD J M, VETH M J. Image aided relative navigation for air vehicles using a passive, statistical predictive rendering approach[C]∥ 24th International Technical Meeting of the Satellite Division of the Institute of Navigation 2011. Manassas: ION, 2011: 3546-3556. |
| 24 | DOEBBLER J, VALASEK J, MONDA M, et al. Boom and receptacle autonomous air refueling using a visual pressure snake optical sensor: AIAA-2006-6504[R]. Reston: AIAA, 2006. |
| 25 | MAMMARELLA M, CAMPA G, NAPOLITANO M R, et al. Machine vision/GPS integration using EKF for the UAV aerial refueling problem[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2008, 38(6): 791-801. |
| 26 | MAMMARELLA M, CAMPA G, NAPOLITANO M R, et al. Comparison of point matching algorithms for the UAV aerial refueling problem[J]. Machine Vision and Applications, 2010, 21(3): 241-251. |
| 27 | MARTINEZ C, RICHARDSON T, CAMPOY P. Towards autonomous air-to-air refueling for UAVs using visual information[C]∥ 2013 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2013: 26-31. |
| 28 | NICHOLS J W, SUN L, BEARD R W, et al. Aerial rendezvous of small unmanned aircraft using a passive towed cable system[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(4): 1131-1142. |
| 29 | 许勇, 颜鸿涛, 贾涛, 等. 固定翼集群无人机空中模拟对接技术[J]. 航空学报, 2023, 44(5): 326539. |
| XU Y, YAN H T, JIA T, et al. Aerial simulation docking technology of fixed-wing clustering UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(5): 326539 (in Chinese). | |
| 30 | CAMPA G, FRAVOLINI M L, FICOLA A, et al. Autonomous aerial refueling for UAVs using a combined GPS-machine vision guidance: AIAA-2004-5350[R]. Reston: AIAA, 2004. |
| 31 | DARLING M B. Autonomous close formation flight of small UAVS using vision-based localization[D]. Pasadena: California Polytechnic State University, 2014. |
| 32 | FOSBURY A M, CRASSIDIS J L. Relative navigation of air vehicles[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(4): 824-834. |
| 33 | LUGO J J, MASSELLI A, ZELL A. Following a quadrotor with another quadrotor using onboard vision[C]∥ 2013 European Conference on Mobile Robots. Piscataway: IEEE Press, 2013: 5756-5762. |
| 34 | VALASEK J, GUNNAM K, KIMMETT J, et al. Vision-based sensor and navigation system for autonomous air refueling[J]. Journal of Guidance, Control, and Dynamics, 2005, 28(5): 979-989. |
| 35 | TANDALE M D, BOWERS R, VALASEK J. Trajectory tracking controller for vision-based probe and drogue autonomous aerial refueling[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(4): 846-857. |
| 36 | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]∥ 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2014: 580-587. |
| 37 | REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 38 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: Single shot MultiBox detector[C]∥ European Conference on Computer Vision. Cham: Springer Cham, 2016: 21-37. |
| 39 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]∥ 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2016: 779-788. |
| 40 | WANG Y X, WANG H L, LIU B L, et al. A visual navigation framework for the aerial recovery of UAVs[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-13. |
| 41 | DOGAN A, BLAKE W, HAAG C. Bow wave effect in aerial refueling: Computational analysis and modeling[J]. Journal of Aircraft, 2013, 50(6): 1856-1868. |
| 42 | BHANDARI U, THOMAS P, BULLOCK S, et al. Bow wave effect in probe and drogue aerial refuelling: AIAA-2013-4695[R]. Reston: AIAA, 2013 |
| 43 | LEWIS T A. Flight data analysis and simulation of wind effects during aerial refueling[D]. Arlington: The University of Texas at Arlington, 2008. |
| 44 | MAHBOUBI Z, KOLTER Z, WANG T, et al. Camera based localization for autonomous UAV formation flight: AIAA-2011-1658[R]. Reston: AIAA, 2011. |
| 45 | PARK S, DEYST J, HOW J. A new nonlinear guidance logic for trajectory tracking: AIAA-2004-4900[R]. Reston: AIAA, 2004. |
| 46 | WATANABE Y, JOHNSON E, CALISE A. Stochastically optimized monocular vision-based guidance design: AIAA-2007-6865[R]. Reston: AIAA, 2007. |
| 47 | FRAVOLINI M L, FICOLA A, CAMPA G, et al. Modeling and control issues for autonomous aerial refueling for UAVs using a probe-drogue refueling system[J]. Aerospace Science and Technology, 2004, 8(7): 611-618. |
| 48 | REHAN M, KHAN Z H. Robust formation control for aerial refueling[C]∥ 2012 International Conference of Robotics and Artificial Intelligence. Piscataway: IEEE Press, 2012: 11-18. |
| 49 | 王宏伦, 杜熠, 盖文东. 无人机自动空中加油精确对接控制[J]. 北京航空航天大学学报, 2011, 37(7): 822-826. |
| WANG H L, DU Y, GAI W D. Precise docking control in unmanned aircraft vehicle automated aerial refueling[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(7): 822-826 (in Chinese). | |
| 50 | KIMMETT J, VALASEK J, JUNKINS J. Autonomous aerial refueling utilizing: A vision based navigation system: AIAA-2002-4469[R]. Reston: AIAA, 2002. |
| 51 | 李大伟, 王宏伦. 无人机自动空中加油飞行控制技术[J]. 系统仿真学报, 2010, 22(S1): 126-130. |
| LI D W, WANG H L. UAV Flight control in automated aerial refueling[J]. Journal of System Simulation, 2010, 22(S1): 126-130 (in Chinese). | |
| 52 | REN J R, DAI X H, QUAN Q A, et al. Reliable docking control scheme for probe⁃drogue refueling[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(11): 2511-2520. |
| 53 | COOPER J R, ROTHHAAR P M. Dynamics and control of in-flight wingtip docking[J]. Journal of Guidance, Control, and Dynamics: A Publication of the American Institute of Aeronautics and Astronautics Devoted to the Technology of Dynamics and Control, 2018, 41(11): 2327-2337. |
| 54 | 段镇. 无人机鲁棒伺服LQR飞行控制律设计[J]. 计算机测量与控制, 2015, 23(8): 2713-2715. |
| DUAN Z. Robust servo LQR flight control law design of UAV[J]. Computer Measurement & Control, 2015, 23(8): 2713-2715 (in Chinese). | |
| 55 | LAVRETSKY E, WISE K A. Robust and adaptive control with output feedback[M]∥ Robust and Adaptive Control. London: Springer London, 2013: 417-449. |
| 56 | 廖伟. 扑翼飞行器自主控制技术研究[D]. 杭州: 浙江大学, 2020. |
| LIAO W. Research of autonomous control technology for the flapping-wing aircraft[D]. Hangzhou: Zhejiang University, 2020 (in Chinese). |
| [1] | Jing NI, Bo MA, Zhaoxu YANG, Chenggang TAO, Yan ZHOU, Yiwen HU. Design and test of visual-inertial integrated method for landing guidance [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727636-727636. |
| [2] | Yahui SONG, Gaoyu FAN, Lixia QU, Yuelin ZHANG, Yue XU, Shuo HAN. Progress of aircraft sonic boom flight test measurement technology: Review [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(2): 626186-626186. |
| [3] | Liu ZHANG, Yong HUANG, Fuzheng CHEN, Zhenglong ZHU, Tianhao GUO, Yubiao JIANG, Zhu ZHOU. Rudderless attitude control flight test based on circulation control of tailless flying wing in pitch and roll axes [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(18): 128224-128224. |
| [4] | Bo LIU, Zhongjie MENG. Tanker/UAV formation tracking control with hose connection constraints [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 328210-328210. |
| [5] | Junliang DING, Lili ZHAO, Tao YANG, Haini ZHANG, Xiaoxia SHEN. Flight test technology of natural icing [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 28270-028270. |
| [6] | Sheng ZHANG, Pan ZHOU, Yang HE, Jiangtao HUANG, Gang LIU, Jigang TANG, Huaizhi JIA, Xin DU. Air combat maneuver decision-making test based on deep reinforcement learning [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 128094-128094. |
| [7] | Shuai SHAO, Zheng GUO, Gaowei JIA, Qingyang CHEN, Zhongxi HOU, Laiping ZHANG. Roll control of medium-aspect-ratio flying-wing UCAV based on trailing-edge jet [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 127437-127437. |
| [8] | ZHAO Kun, LIANG Junbiao, Ivan BELYAEV, Victor KOPIEV, Gareth BENNETT. Review of civil airplane landing gear noise study and its control approaches [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 26996-026996. |
| [9] | CEN Fei, LIU Zhitao, JIANG Yong, GUO Tianhao, ZHANG Lei, KONG Yinan. Unsteady aerodynamics modeling of civil transport configuration under extreme flight conditions [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 125582-125582. |
| [10] | ZHOU Yitao, YANG Yang, WU Zhigang, YANG Chao. Flight test for gust alleviation on a high aspect ratio UAV platform [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(6): 526126-526126. |
| [11] | CHEN Guangqiang, DOU Guohui, WEI Haogong, ZOU Xin, LI Qi, LIU Zhou, ZHOU Weijiang. Air data sensing technology of Mars probe [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(3): 626619-626619. |
| [12] | WANG Meng, LI Yujun, ZHAO Ronghuan, ZHONG Hongjie. Transition detection technique for wide speed range by means of on-line heating coating [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(11): 526820-526820. |
| [13] | DENG Yiju, DUAN Zhuoyi, AI Mengqi. Status and development of laminar flow wing design technology [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(11): 526778-526778. |
| [14] | ZHOU Zhenyao, LYU Fei, ZHOU Bin, YANG Zhao. Verification method for natural laminar flow drag reduction and layout design of test section [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(11): 526751-526751. |
| [15] | WANG Hao, ZHONG Min, HUA Jun, ZHONG Hai, YANG Tihao, WANG Meng, LEI Guodong. Simulation and experiment of natural laminar flow flight test wing glove [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(11): 526785-526785. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341