Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (21): 528471-528471.doi: 10.7527/S1000-6893.2023.28471
• Articles • Previous Articles Next Articles
Wenjun DING1,2, Yajun CHAI1, Dongdong HOU3, Chiyu WANG1, Guozong ZHANG1, Zhaoyong MAO1( )
)
Received:2023-01-03
Revised:2023-04-10
Accepted:2023-05-07
Online:2023-11-15
Published:2023-05-12
Contact:
Zhaoyong MAO
E-mail:maozhaoyong@nwpu.edu.cn
Supported by:CLC Number:
Wenjun DING, Yajun CHAI, Dongdong HOU, Chiyu WANG, Guozong ZHANG, Zhaoyong MAO. Path planning for AUV&UAV cross⁃domain collaborative search and tracking[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(21): 528471-528471.
Fig.1
AUV&UAV system search and tracking task process
Fig.2
Model sketch of AUV and UAV
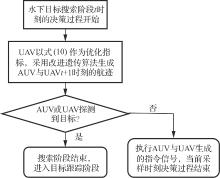
Fig.3
Centralized decision process at search time t
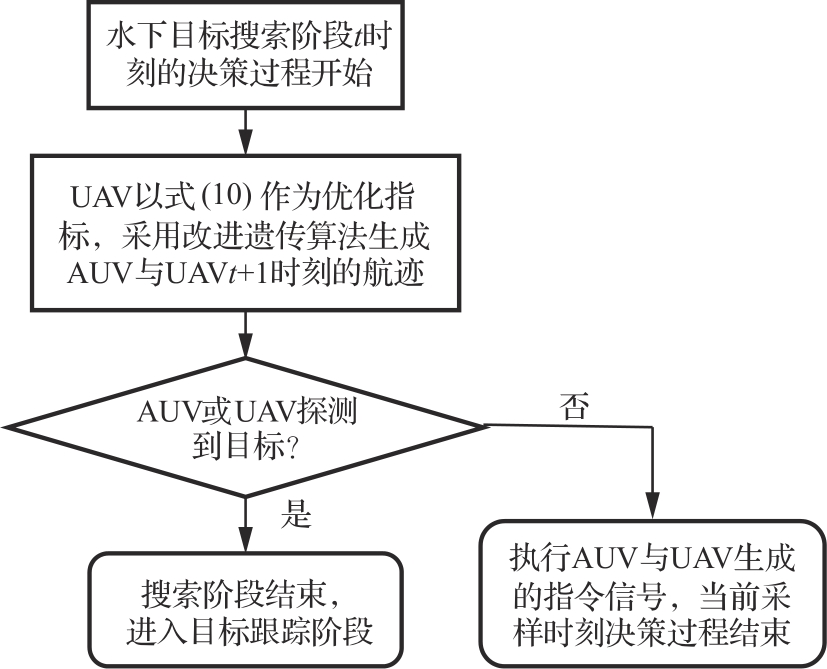
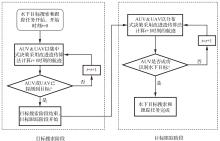
Fig.4
Collaborative path planning
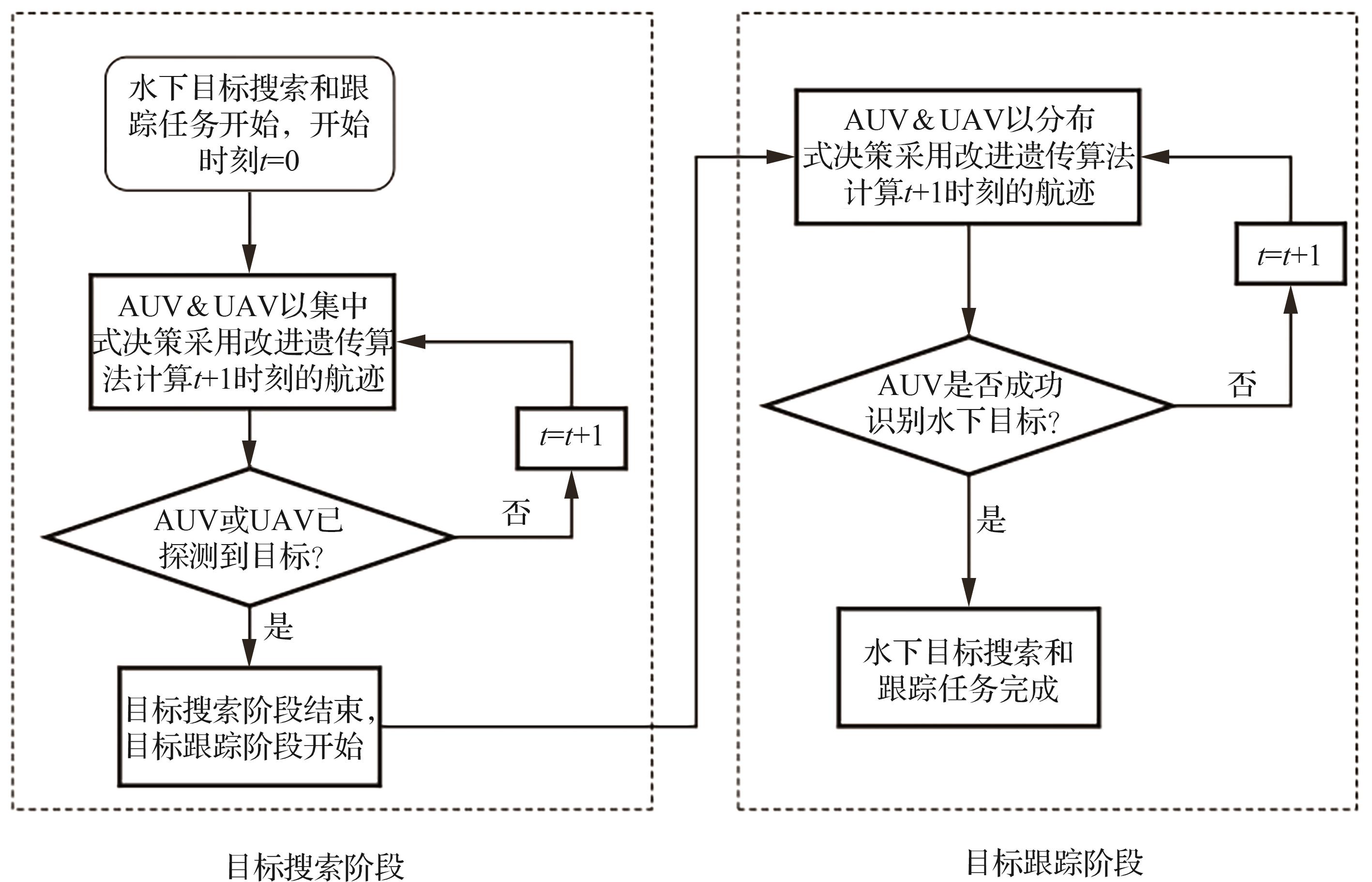
Table 1
Initial state and constraint settings
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| φU/(°) | 0 | aTmax/(m·s-1) | 1 |
| vU/(m·s-1) | 15 | vUmax/(m·s-1) | 25 |
| φA/(°) | 0 | vAmax/(m·s-1) | 6 |
| vA/(m·s-1) | 5 | vTmax/(m·s-1) | 3 |
| rUmax/(rad·s-1) | 0.2 | xmin/m | -5 000 |
| aUmax/(m·s-1) | 5 | xmax/m | 5 000 |
| rAmax/(rad·s-1) | 0.2 | ymin/m | -5 000 |
| aAmax/(m·s-1) | 1 | ymax/m | 5 000 |
| rTmax/(rad·s-1) | 0.2 | dU-A/m | 1 500 |
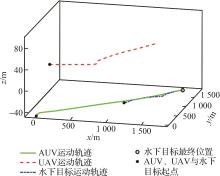
Fig.5
Trajectories of AUV, UAV and underwater target under Case 1
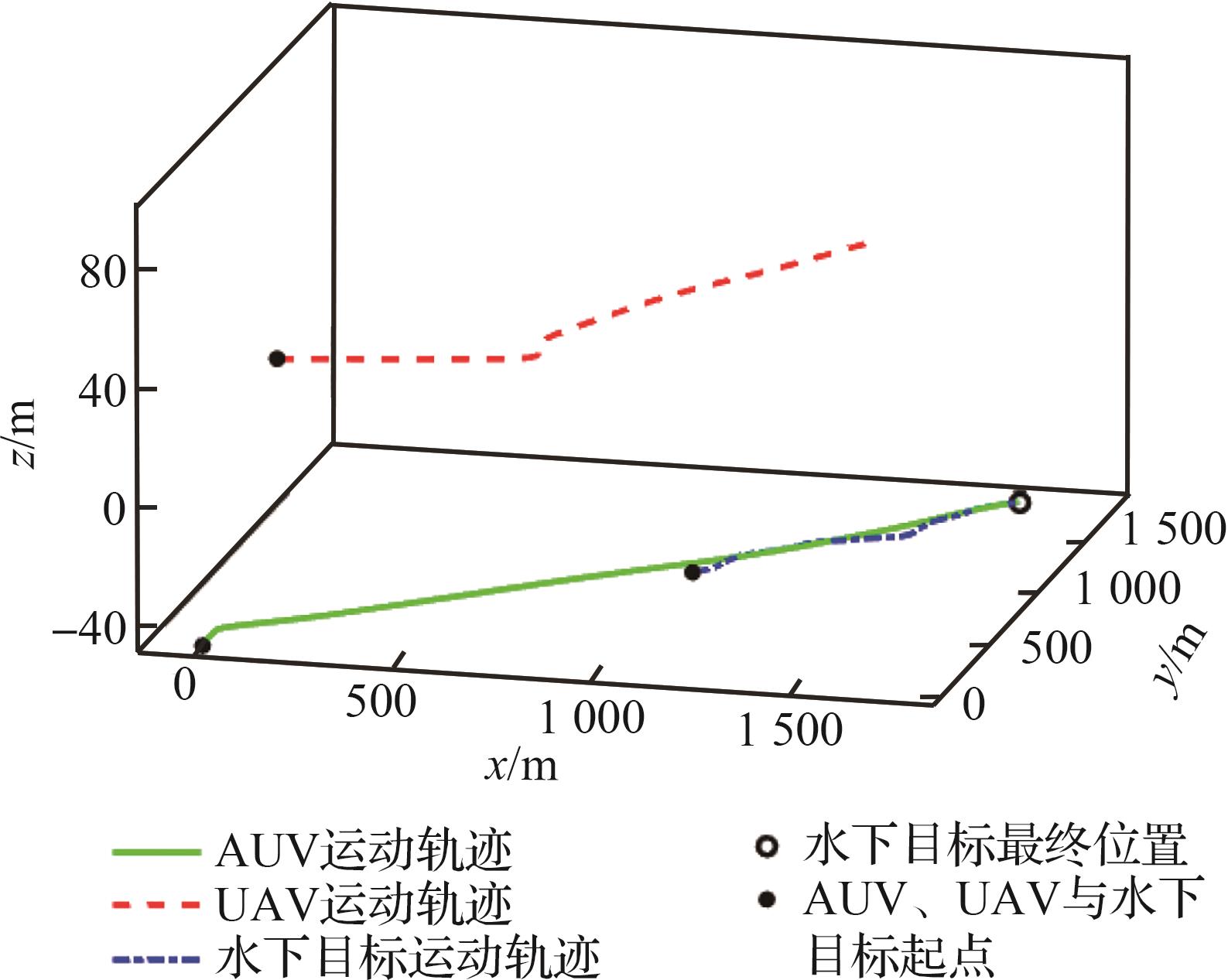
Fig.6
Distance between each pair of AUV, UAV and underwater target under Case 1
Table 2
Result data of search and tracking tasks under Case 1
| 项目 | 数据 |
|---|---|
| 探测到目标时刻/s | UAV:31;AUV:258 |
| 任务结束时刻/s | 361 |
| 与目标末端位置误差/m | 1.41 |
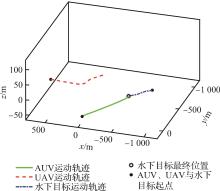
Fig.7
Trajectories of AUV, UAV and underwater target under Case 2
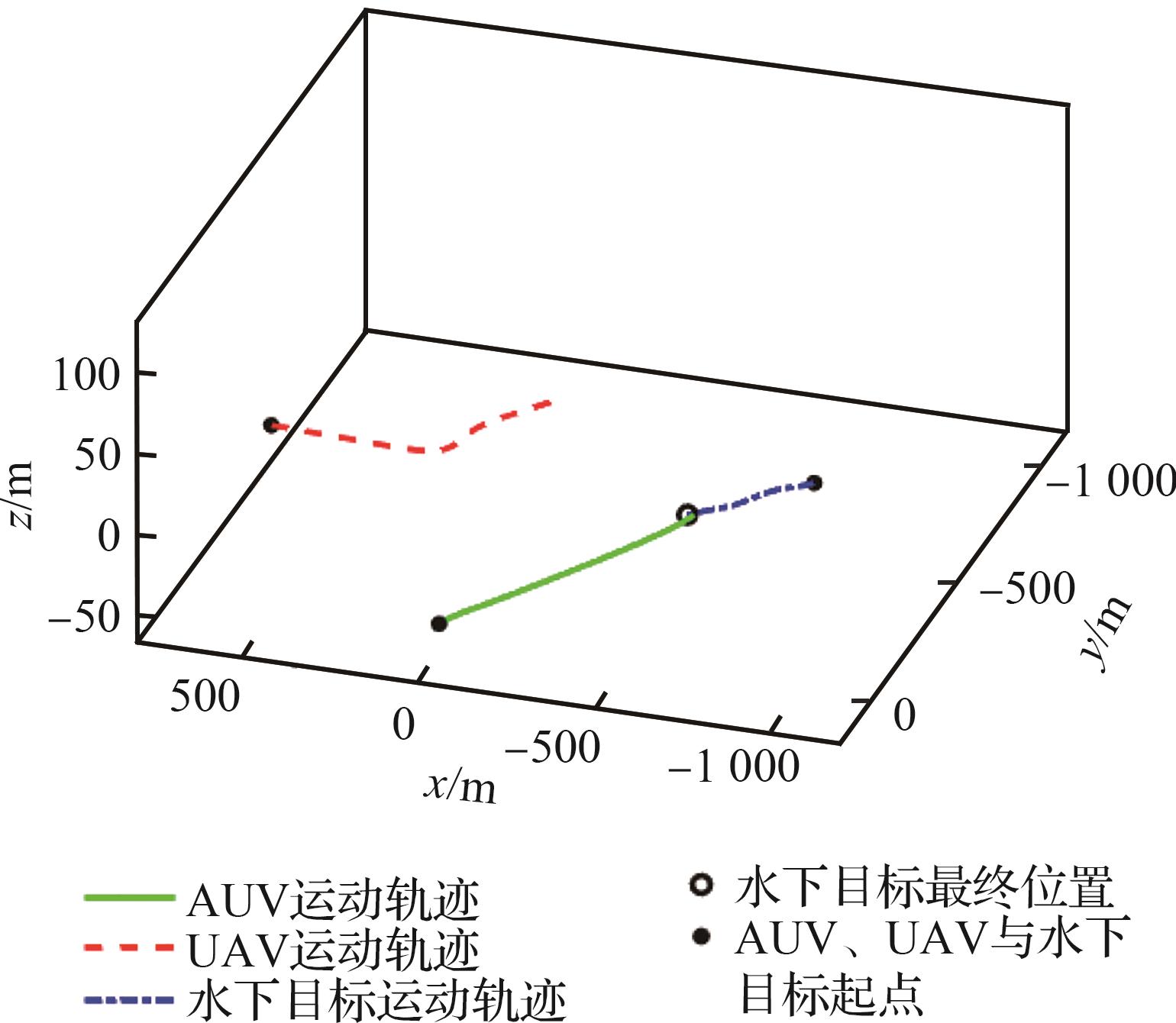
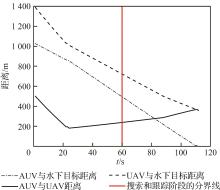
Fig.8
Distance between each pair of AUV, UAV and underwater target under Case 2
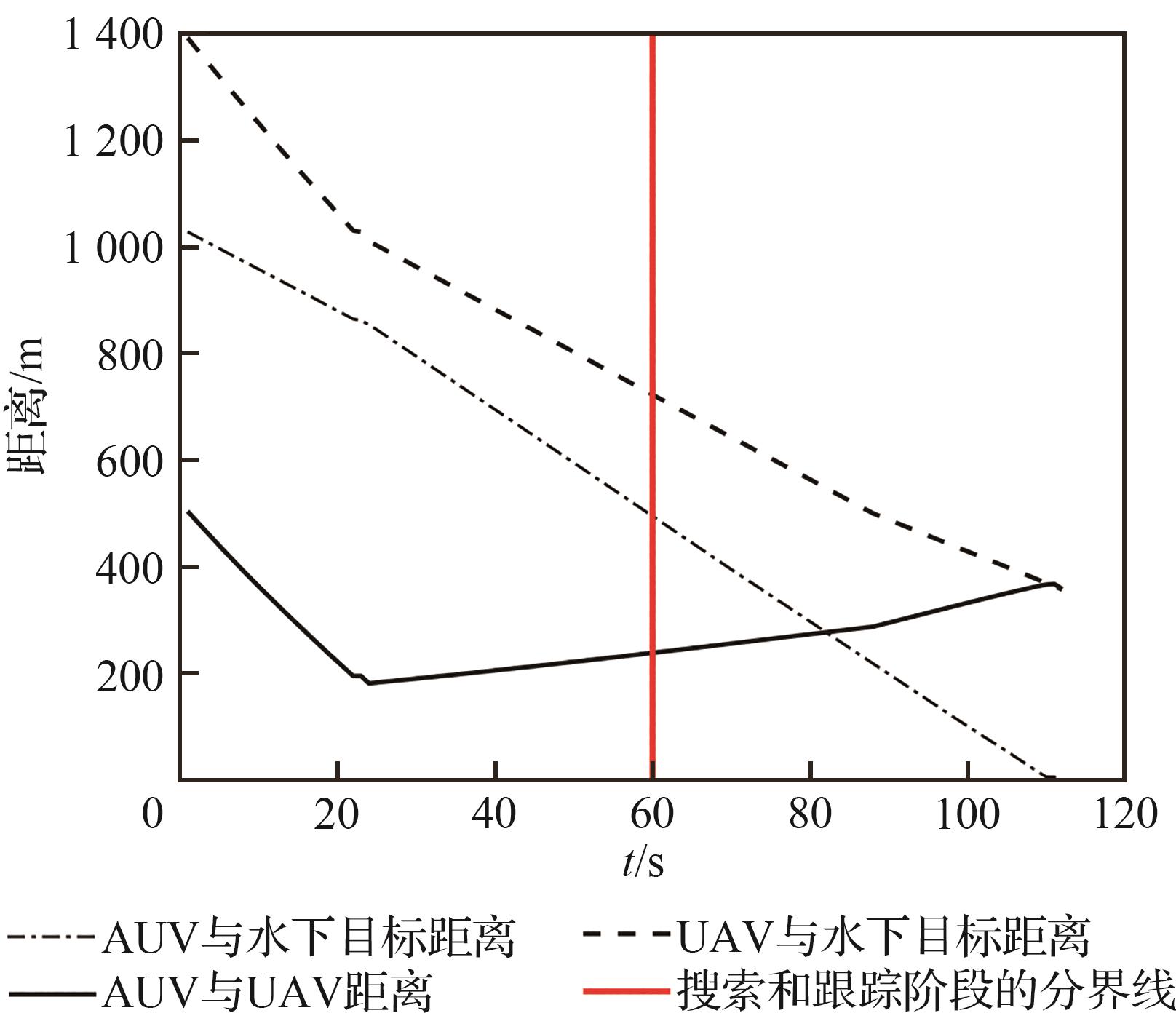
Table 3
Result data of search and tracking tasks under Case 2
| 项目 | 数据 |
|---|---|
| 探测到目标时刻/s | AUV:60 |
| 任务结束时刻/s | 112 |
| 与目标末端位置误差/m | 1.23 |
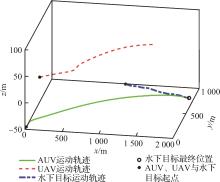
Fig.9
Motion prediction without extended Kalman filter
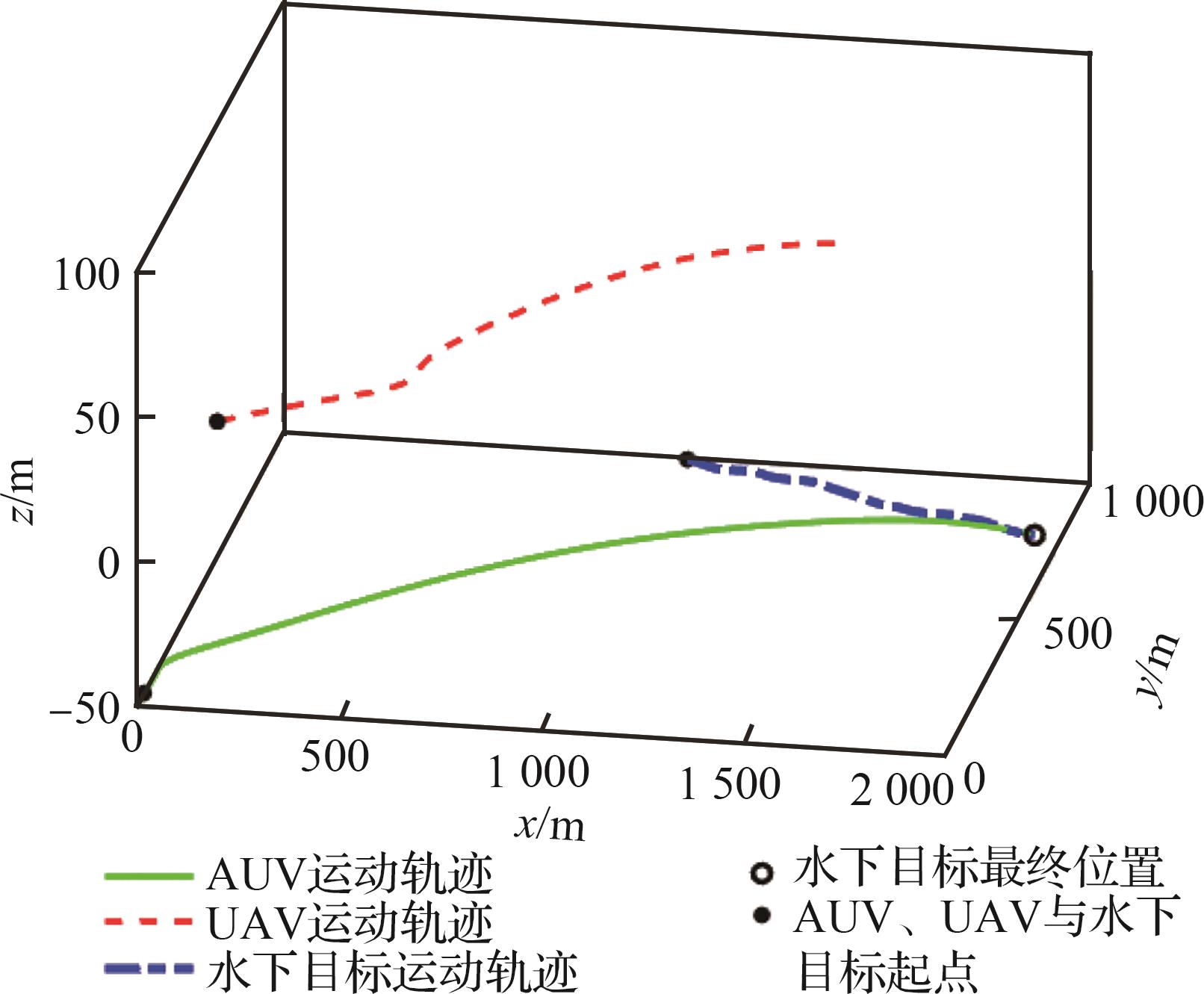
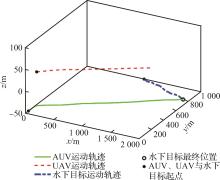
Fig.10
Motion prediction with extended Kalman filter
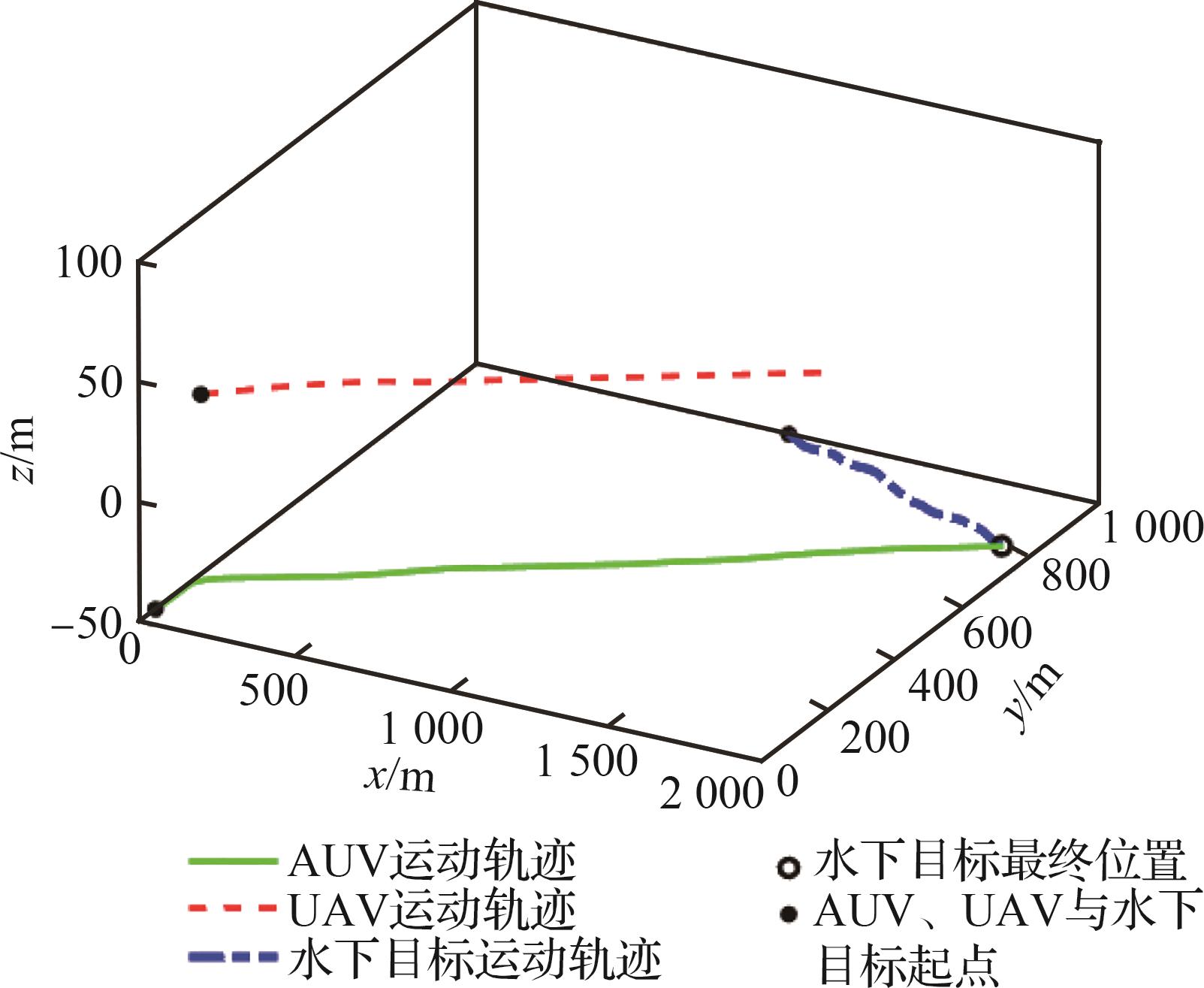
Table 4
Comparison of predictive tracking performance with or without extended Kalman filtering in target tracking stage
| 项目 | 未使用扩展 卡尔曼预测 | 使用扩展 卡尔曼预测 |
|---|---|---|
| AUV探测到目标时刻/s | 200 | 186 |
| 任务结束时刻/s | 320 | 308 |
| 与目标末端位置误差/m | 1.26 | 0.98 |
| 1 | 张哲璇, 龙腾, 徐广通, 等. 重访机制驱动的多无人机协同动目标搜索方法[J]. 航空学报, 2020, 41(5): 323314. |
| ZHANG Z X, LONG T, XU G T, et al. Revisit mechanism driven multi-UAV cooperative search planning method for moving targets[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(5): 323314 (in Chinese). | |
| 2 | 熊伟, 朱洪峰, 崔亚奇. 在线学习的循环自适应机动目标跟踪算法[J]. 航空学报, 2022, 43(5): 325250. |
| XIONG W, ZHU H F, CUI Y Q. Recurrent adaptive maneuvering target tracking algorithm based on online learning[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(5): 325250 (in Chinese). | |
| 3 | 陈军, 张新伟, 徐嘉, 等. 有人/无人机混合编队有限干预式协同决策[J]. 航空学报, 2015, 36(11): 3652-3665. |
| CHEN J, ZHANG X W, XU J, et al. Human/unmanned-aerial-vehicle team collaborative decision-making with limited intervention[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(11): 3652-3665 (in Chinese). | |
| 4 | 胡腾, 刘占军, 刘洋, 等. 多无人机3D侦察路径规划[J]. 系统工程与电子技术, 2019, 41(7): 1551-1559. |
| HU T, LIU Z J, LIU Y, et al. 3D surveillance path planning for multi-UAVs[J]. Systems Engineering and Electronics, 2019, 41(7): 1551-1559 (in Chinese). | |
| 5 | 李绍斌, 姜大立, 杨西龙, 等. 基于混合遗传算法的多基地多无人机战场物资配送任务分配[J]. 装甲兵工程学院学报, 2019, 33(2): 10-19. |
| LI S B, JIANG D L, YANG X L, et al. Multi-base and multi-UAV battlefield material distribution task assignment based on hybrid genetic algorithm[J]. Journal of Academy of Armored Force Engineering, 2019, 33(2): 10-19 (in Chinese). | |
| 6 | QIE T Q, WANG W D, YANG C, et al. A path planning algorithm for autonomous flying vehicles in cross-country environments with a novel TF-RRT* method[J]. Green Energy and Intelligent Transportation, 2022, 1(3): 100026. |
| 7 | 杨勇, 丁勇, 黄鑫城. 改进APF与Bezier相结合的多无人机协同避碰航路规划[J]. 电光与控制, 2018, 25(11): 36-41. |
| YANG Y, DING Y, HUANG X C. Multi-UAV cooperative collision avoidance route planning based on improved artificial potential field and Bezier curve[J]. Electronics Optics & Control, 2018, 25(11): 36-41 (in Chinese). | |
| 8 | 包昕幼. 浅水区域无人探测艇编队巡航路径规划研究[D]. 广州: 华南理工大学, 2018. |
| BAO X Y. Study on cruise route planning of unmanned exploration vessel formation in shallow water area[D]. Guangzhou: South China University of Technology, 2018 (in Chinese). | |
| 9 | HE S D, WANG M, DAI S L, et al. Leader-follower formation control of USVs with prescribed performance and collision avoidance[J]. IEEE Transactions on Industrial Informatics, 2019, 15(1): 572-581. |
| 10 | DAI S L, HE S D, LIN H, et al. Platoon formation control with prescribed performance guarantees for USVs[J]. IEEE Transactions on Industrial Electronics, 2018, 65(5): 4237-4246. |
| 11 | HAN G J, LONG X H, ZHU C, et al. A high-availability data collection scheme based on multi-AUVs for underwater sensor networks[J]. IEEE Transactions on Mobile Computing, 2020, 19(5): 1010-1022. |
| 12 | 马朋, 张福斌, 徐德民. 基于距离量测的双领航多AUV协同定位队形优化分析[J]. 控制与决策, 2018, 33(2): 256-262. |
| MA P, ZHANG F B, XU D M. Optimality analysis for formation of MAUV cooperative localization with two leaders based on range measurements[J]. Control and Decision, 2018, 33(2): 256-262 (in Chinese). | |
| 13 | RIDAO P, CARRERAS M, RIBAS D, et al. Intervention AUVs: The next challenge[J]. Annual Reviews in Control, 2015, 40: 227-241. |
| 14 | NI J J, YANG L, WU L Y, et al. An improved spinal neural system-based approach for heterogeneous AUVs cooperative hunting[J]. International Journal of Fuzzy Systems, 2018, 20(2): 672-686. |
| 15 | QIN H L, MENG Z H, MENG W, et al. Autonomous exploration and mapping system using heterogeneous UAVs and UGVs in GPS-denied environments[J]. IEEE Transactions on Vehicular Technology, 2019, 68(2): 1339-1350. |
| 16 | BELLA S, BELBACHIR A, BELALEM G. A centralized autonomous system of cooperation for UAVs-monitoring and USVs-cleaning[M]∥ Unmanned Aerial Vehicles. Hershey: IGI Global, 2019: 347-375. |
| 17 | BELLA S, BELBACHIR A, BELALEM G. A hybrid architecture for cooperative UAV and USV swarm vehicles[C]∥ International Conference on Machine Learning for Networking. Cham: Springer, 2019: 341-363. |
| 18 | LI Y, MA T, CHEN P Y, et al. Autonomous underwater vehicle optimal path planning method for seabed terrain matching navigation[J]. Ocean Engineering, 2017, 133: 107-115. |
| 19 | SHEN C, SHI Y, BUCKHAM B. Integrated path planning and tracking control of an AUV: A unified receding horizon optimization approach[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(3): 1163-1173. |
| 20 | CUI R X, LI Y, YAN W S. Mutual information-based multi-AUV path planning for scalar field sampling using multidimensional RRT* [J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2016, 46(7): 993-1004. |
| 21 | WU Y. Coordinated path planning for an unmanned aerial-aquatic vehicle (UAAV) and an autonomous underwater vehicle (AUV) in an underwater target strike mission[J]. Ocean Engineering, 2019, 182: 162-173. |
| 22 | ZHANG H, LIU C, ZHAO W Z. Segmented trajectory planning strategy for active collision avoidance system[J]. Green Energy and Intelligent Transportation, 2022, 1(1): 100002. |
| 23 | 韩凯, 董日昌, 邵丰伟, 等. 基于改进遗传算法的导航卫星星间链路网络动态拓扑优化技术[J]. 航空学报, 2022, 43(9): 326095. |
| HAN K, DONG R C, SHAO F W, et al. Dynamic topology optimization of navigation satellite inter-satellite links network based on improved genetic algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(9): 326095 (in Chinese). | |
| 24 | 赵鹏程, 宋保维, 毛昭勇, 等. 基于改进的复合自适应遗传算法的UUV水下回收路径规划[J]. 兵工学报, 2022, 43(10): 2598-2608. |
| ZHAO P C, SONG B W, MAO Z Y, et al. Path planning for UUV underwater recovery based on improved composite adaptive genetic algorithm[J]. Acta Armamentarii, 2022, 43(10): 2598-2608 (in Chinese). | |
| 25 | WU Y, LOW K H, LV C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target[J]. IEEE Transactions on Vehicular Technology, 2020, 69(6): 6782-6787. |
| 26 | 吴宇, 苏析超, 崔佳鹏, 等. USV&AUV水下目标协同搜索与打击航迹规划[J]. 控制与决策, 2021, 36(4): 825-834. |
| WU Y, SU X C, CUI J P, et al. Coordinated path planning of USV & AUV for an underwater target[J]. Control and Decision, 2021, 36(4): 825-834 (in Chinese). |
| [1] | Haifeng WANG, Kunpeng LIU, Hongxin JIANG, Chenxi DU. Aerodynamic optimization method of propeller multi⁃design points and variable pitch angle strategy [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 528831-528831. |
| [2] | Jing ZHAO, Dan SONG. Integrity monitoring method for GNSS/IMU integrated navigation system of UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 328943-328943. |
| [3] | Chuanyun WANG, Yang SU, Linlin WANG, Tian WANG, Jingjing WANG, Qian GAO. Multi-object continuous robust tracking algorithm for anti-UAV swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 329017-329017. |
| [4] | Hongyu YIN, Yu WU, Tianjiao LIANG. Cooperative path planning for patrol coverage of fixed wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 328944-328944. |
| [5] | Xudong LUO, Yiquan WU, Jinlin CHEN. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 28822-028822. |
| [6] | Chuihuan KONG, Dawei WU, Zhaoguang TAN, Lijun PAN, Rubing MA, Jiangtao SI. Design of fully electric scheme for three⁃surface verification aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 629618-629618. |
| [7] | Guangjia LI, Hongbo WANG, Kai ZHANG, Zhisheng YI. Lift enhancement and drag reduction technologies of solar powered unmanned aerial vehicles in near space: Review [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529644-529644. |
| [8] | Yunpeng CAI, Dapeng ZHOU, Jiangchuan DING. Intelligent collaborative control of UAV swarms with collision avoidance safety constraints [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529683-529683. |
| [9] | Zhu WANG, Mengtong ZHANG, Zhenpeng ZHANG, Guangtong XU. Multi-UAV cooperative path planning based on multi-index dynamic priority [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328816-328816. |
| [10] | Gaojie ZHENG, Xiaoming HE, Dongpo LI, Huijun TAN, Kun WANG, Zhenlong WU, Depeng WANG. Double 90° deflection inlet/volute coupling flow characteristics of tail-powered unmanned aerial vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 128782-128782. |
| [11] | Zhenwei WANG, Kai LIU, Jian GUO, Xiaopeng LIU. A multi⁃UAVs and multi⁃USVs formation cooperative mechanism based on leader⁃follower strategy [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729791-729791. |
| [12] | Hongzhen GUO, Mou CHEN, Yongdong DAI, Maofei WANG. Distributed adaptive event⁃triggered formation control for QUAVs [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729917-729917. |
| [13] | Kunda LIU, Xueming LIU, Bo ZHU, Qingrui ZHANG. Robust safe control for multi⁃UAV formation flight through narrow corridors [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729768-729768. |
| [14] | Wenkang HAO, Suyan BAO, Qifeng CHEN. Distributed control of UAVs formation based on port⁃Hamiltonian system [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729868-729868. |
| [15] | Yuqi CAO, Haoran FU, Fei GAO, Ximin LYU. Trajectory tracking control algorithm for canard⁃equipped tail⁃sitting vertical takeoff and landing UAV based on MPCC [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729950-729950. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341