ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (12): 327731-327731.doi: 10.7527/S1000-6893.2022.27731
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Chuankai LIU1,2,3( ), Junxiong LEI1, Qian LIU2,3, Jun SUN2,3, Jianhua SU4, Xiaodong HU2, Dongsheng LI1
), Junxiong LEI1, Qian LIU2,3, Jun SUN2,3, Jianhua SU4, Xiaodong HU2, Dongsheng LI1
Received:2022-06-30
Revised:2022-08-04
Accepted:2022-08-12
Online:2023-06-25
Published:2022-08-17
Contact:
Chuankai LIU
E-mail:ckliu2005@126.com
Supported by:CLC Number:
Chuankai LIU, Junxiong LEI, Qian LIU, Jun SUN, Jianhua SU, Xiaodong HU, Dongsheng LI. Fast and precise location measurement of joint multiple ellipses based on inverse transformation of perspective projection[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(12): 327731-327731.

Fig.1
Inverse projection transformation based target relative pose measurement algorithm flow
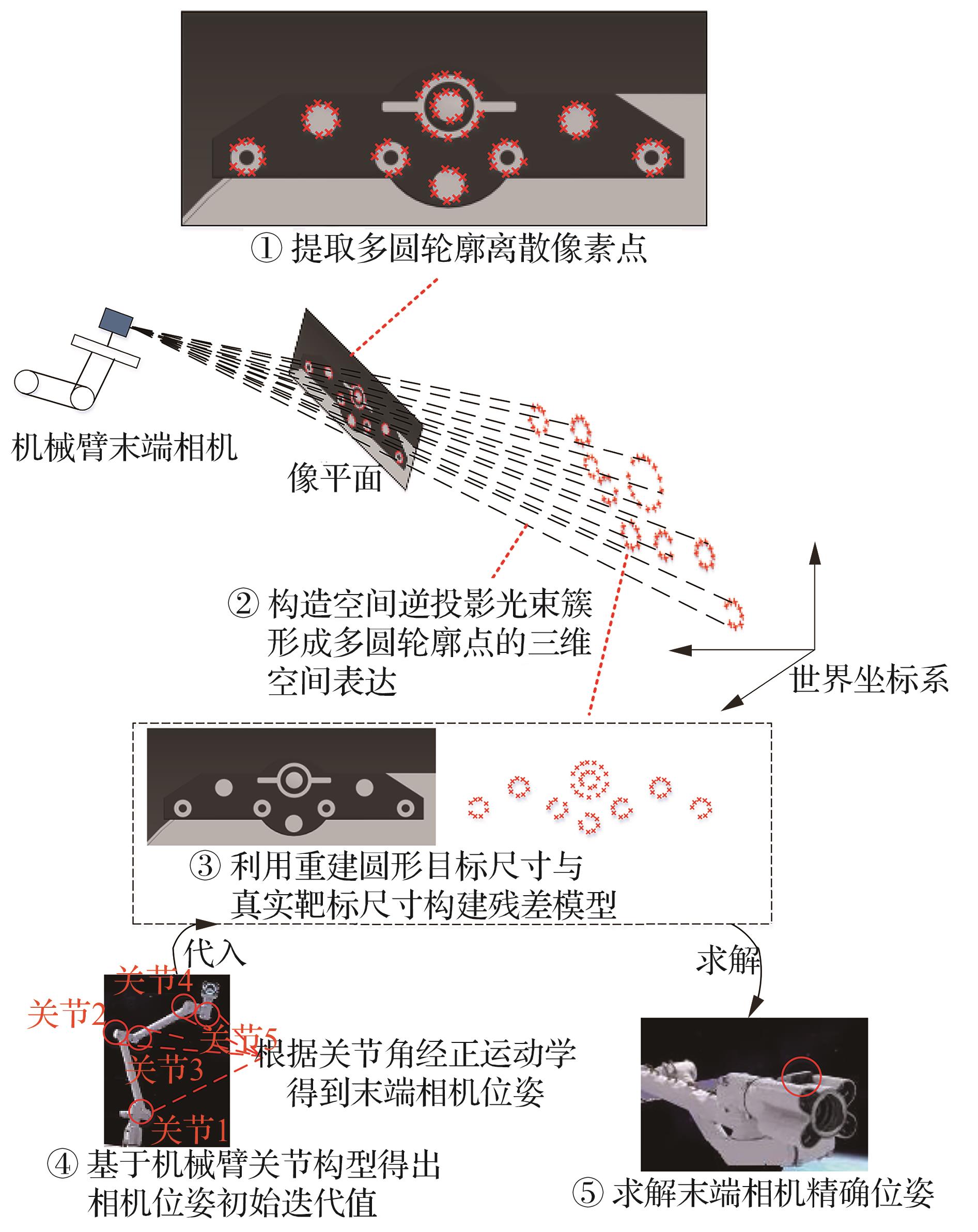
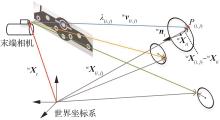
Fig.2
Diagram of inverse projection imaging of circular contour points
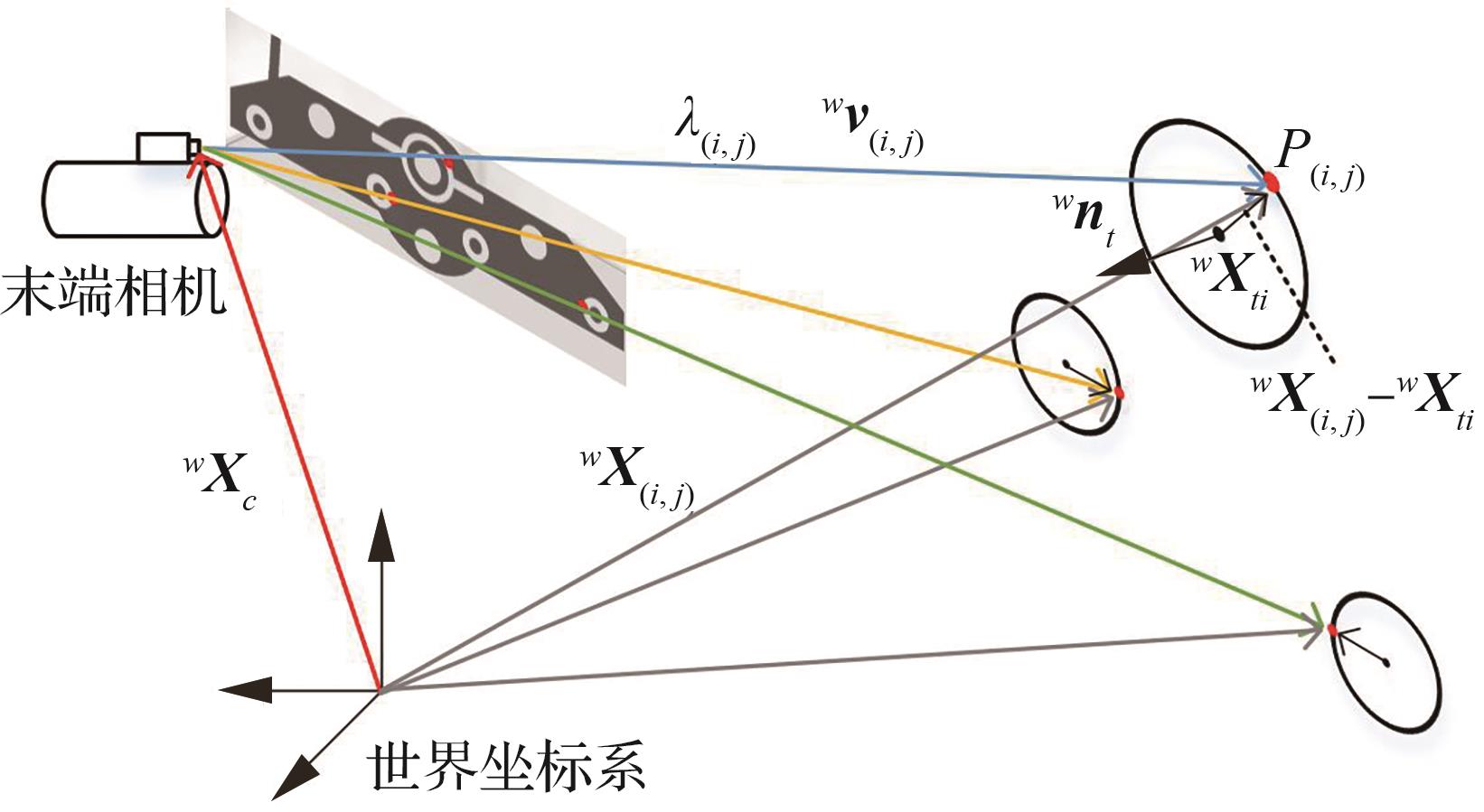

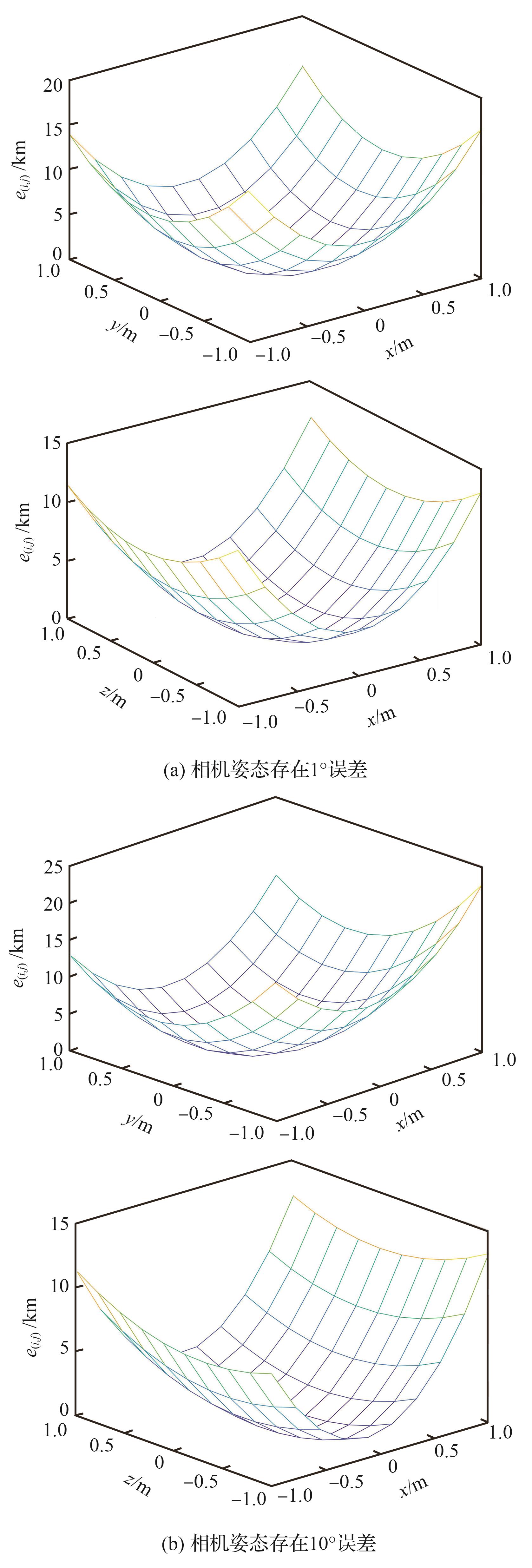
Fig.3
Surface of error function with changes of camera position and pose

Fig.4
Surface of error function with changes of camera position when camera pose error is existed
输入 | 基于机械臂当前关节构型和基座位姿经正运动学结算得到末端相机初始迭代值 |
|---|---|
步骤1 | 取 |
步骤2 | 计算 |
步骤3 | 计算残差函数矩阵下降方向 |
步骤4 | 采用Armijo算法线性搜索合适的下降步长 |
步骤5 | 更新自变量 |
输出 | 末端相机精确位姿解 |

Fig.5
Two types of targets used on China space station[20-21]


Fig.6
Camera position and pose errors when camera moves in y⁃z direction(the first target)
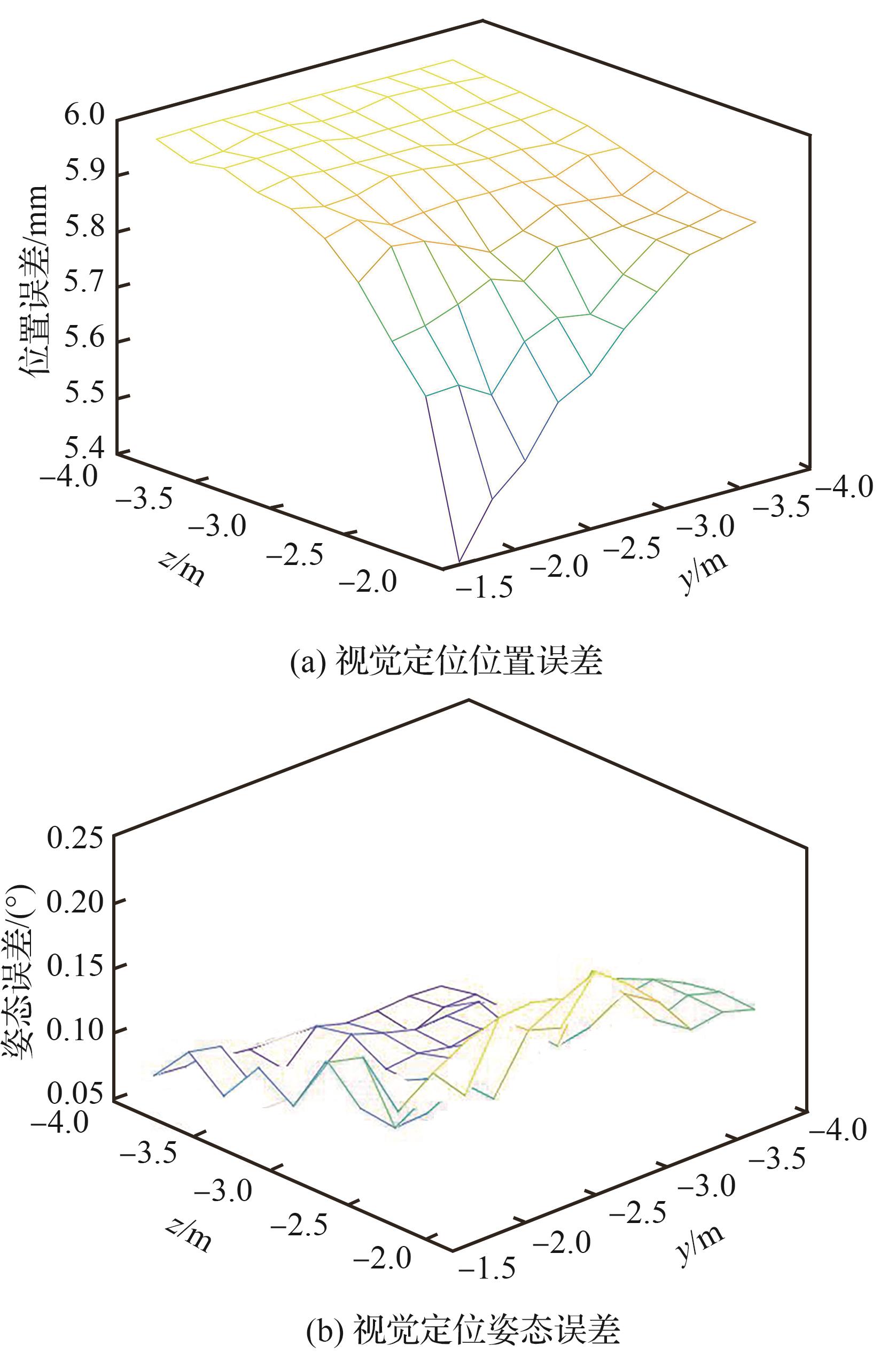

Fig.7
Camera position and pose errors when camera moves in y⁃z direction(the second target)


Fig.8
Comparison of position error and pose error between proposed algorithm and EPNP algorithm in different noise environments (the first target)


Fig.9
Comparison of position error and pose error between proposed algorithm and two types of PNP algorithms in different noise environments (the second target)


Fig.10
Type of multi-circular cooperative target and adapter
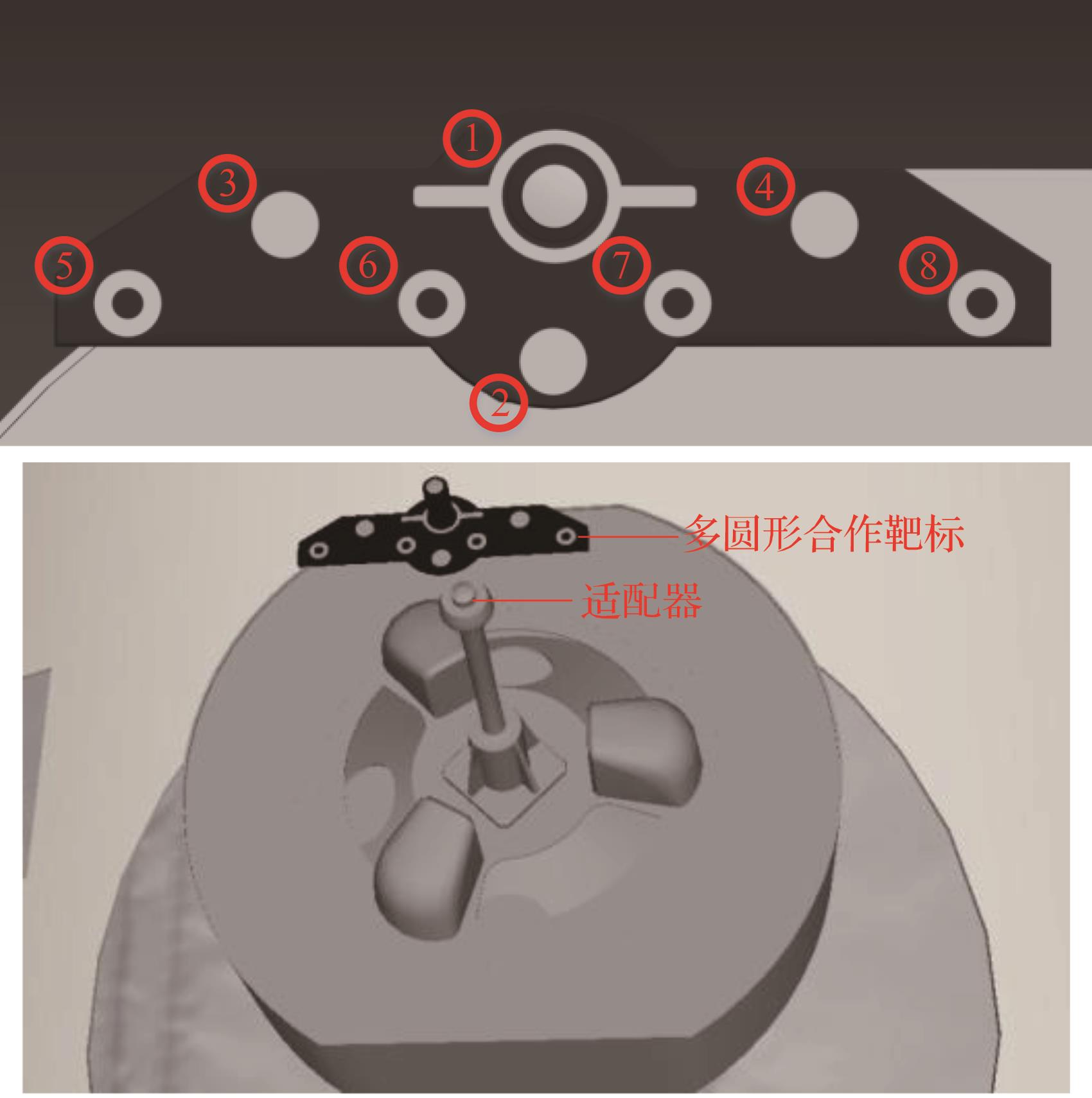
Table 1
Dimensions of each circular target and relative positional relationship between target and adapter
| 圆形序号 | 半径/mm | x/mm | y/mm | z/mm | 姿态角 |
|---|---|---|---|---|---|
| 1(外白色圆环) | 18.75 | -4.596 | 59.92 | 265 | 靶标姿态角均与适配器一致 |
| 1(内白色圆圈) | 8 | -56.073 | 59.92 | 265 | |
| 2 | 9.32 | -4.596 | 59.92 | 218.723 | |
| 3 | 9.32 | -4.596 | 134.585 | 257 | |
| 4 | 9.32 | -4.596 | -14.745 | 257 | |
| 5 | 9.32 | -4.596 | 178.388 | 235 | |
| 6 | 9.32 | -4.596 | 93.73 | 235 | |
| 7 | 9.32 | -4.596 | 26.11 | 235 | |
| 8 | 9.32 | -4.596 | -58.548 | 235 |

Fig.11
Images of cooperative targets acquired from different orientations and distances
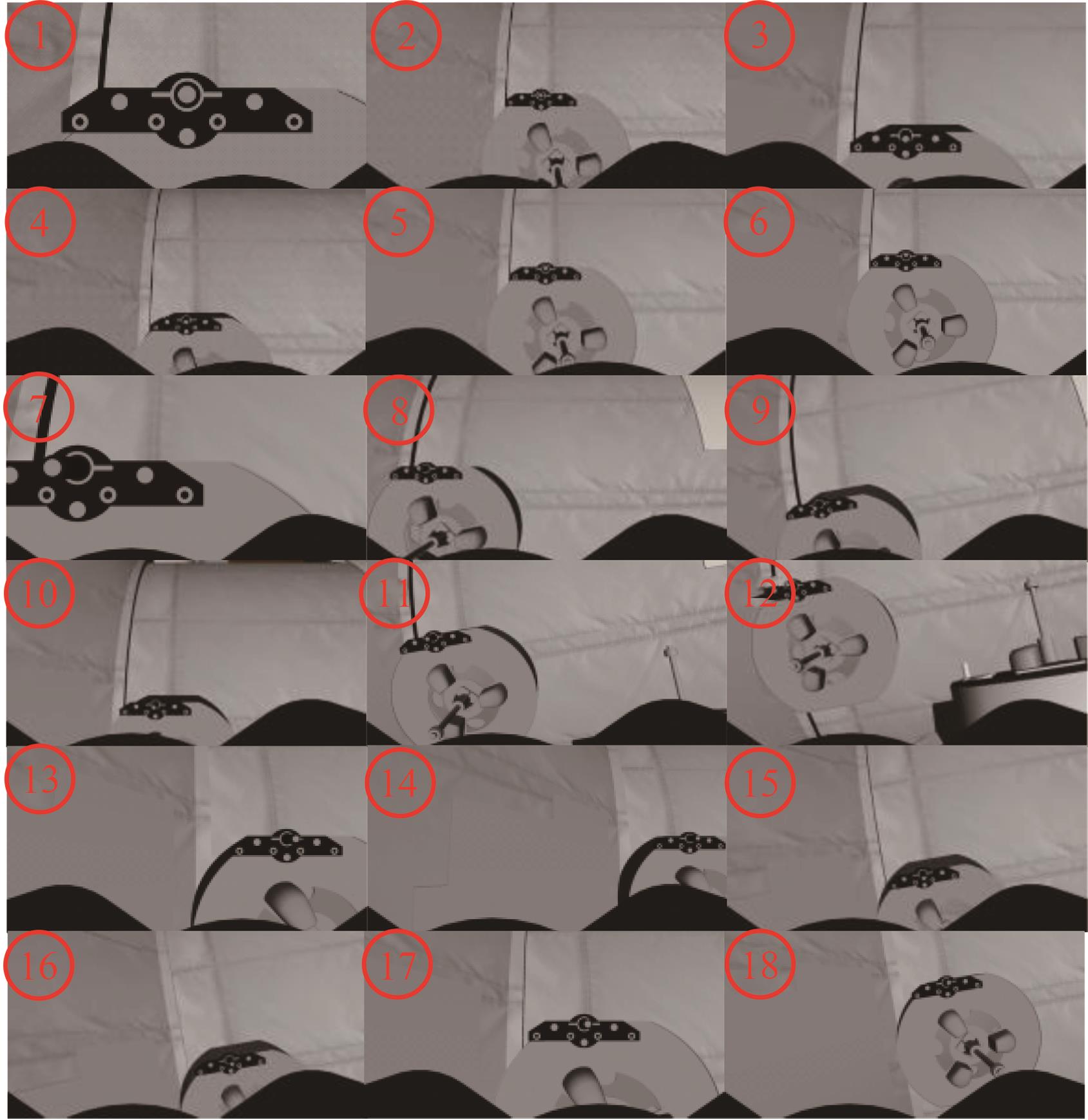

Fig.12
Multi-circular target area extraction results
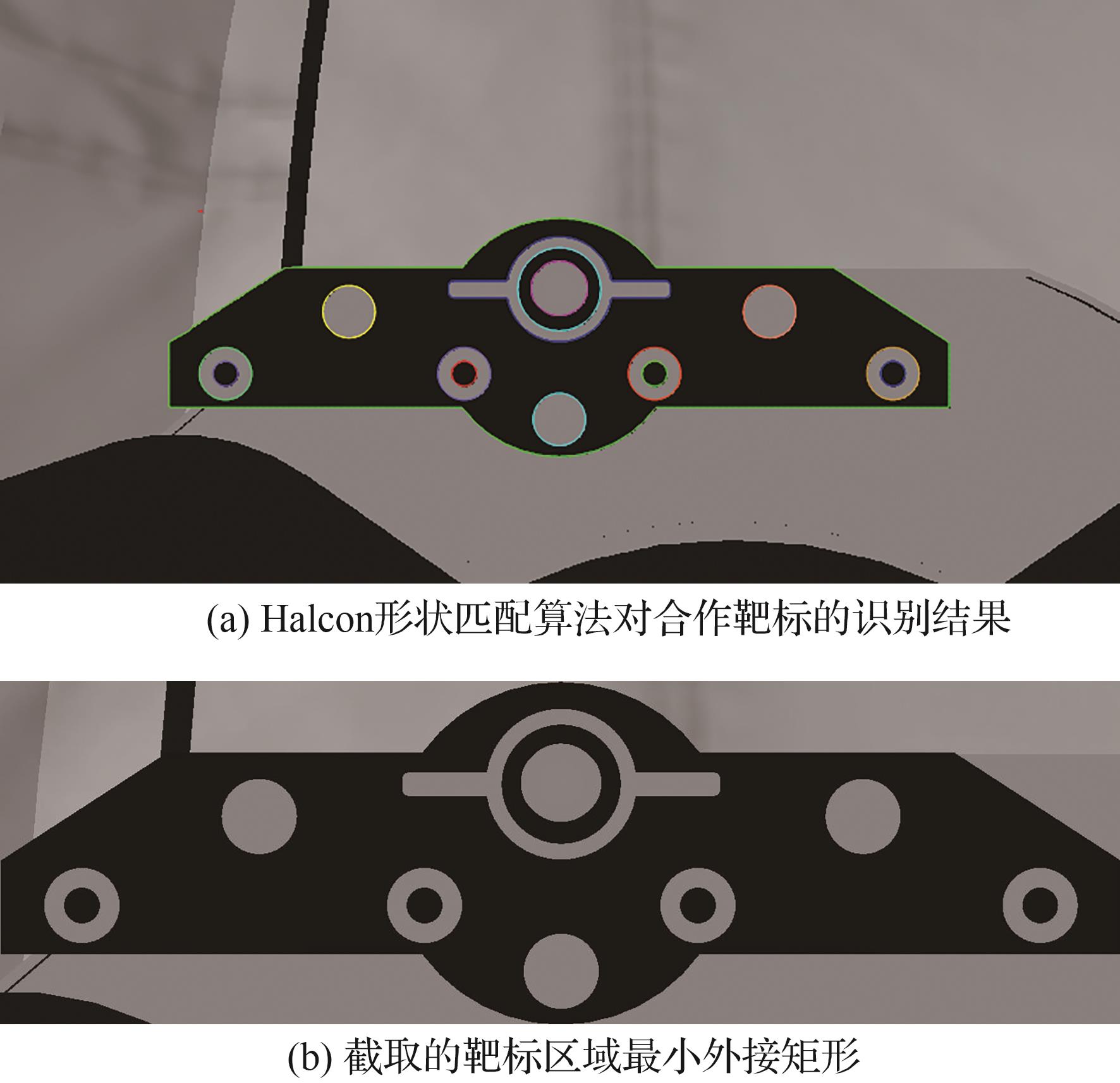
Table 2
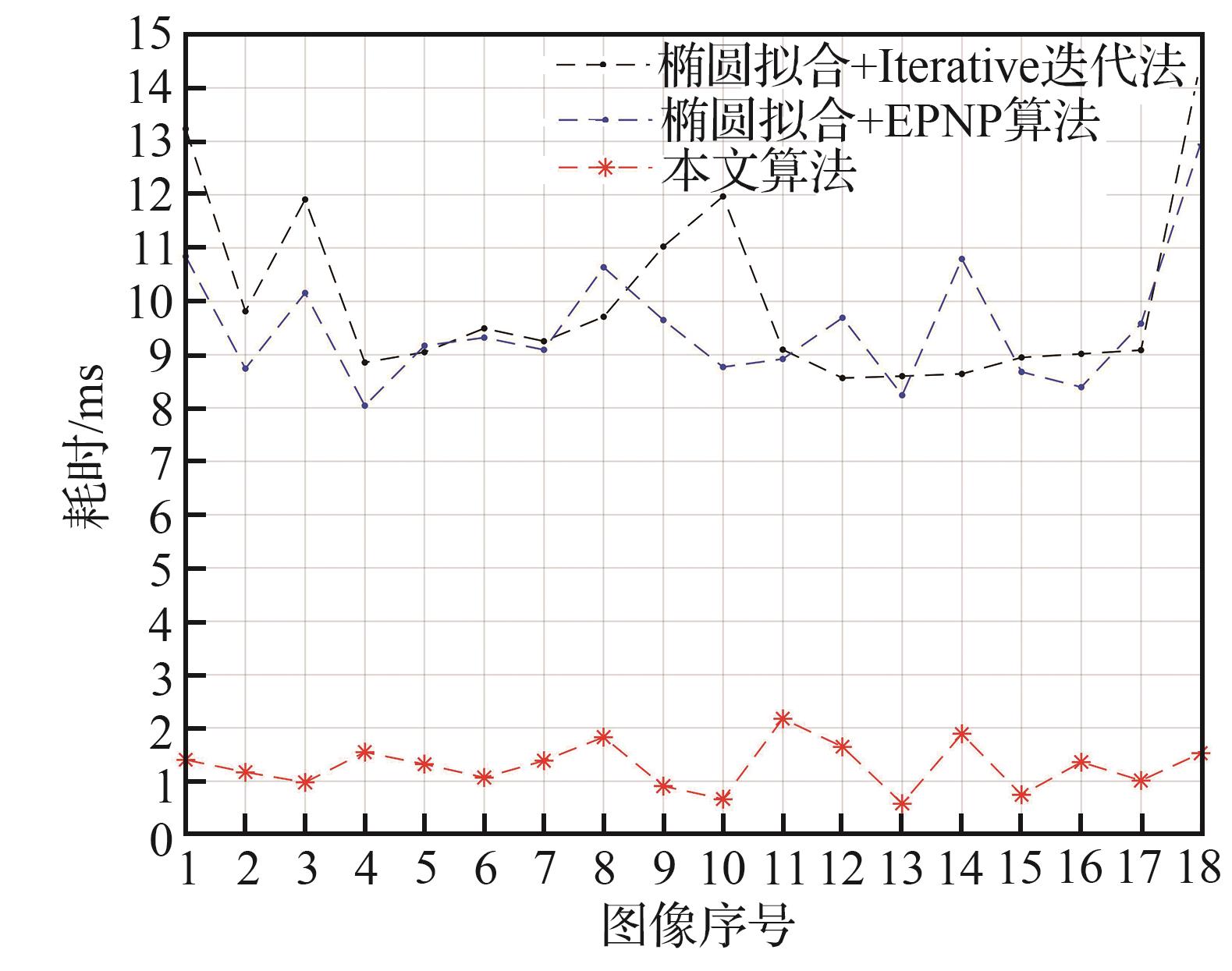
Comparison of time consumption between our algorithm and two types of PNP algorithms in part of visual localization experiment
| 序号 | 耗时/ms | ||
|---|---|---|---|
| 本文算法 | 椭圆拟合+ Iterative迭代法 | 椭圆拟合+ EPNP算法 | |
| 1 | 1.401 | 13.234 | 10.841 |
| 4 | 1.545 | 8.852 | 8.043 |
| 7 | 1.384 | 9.251 | 9.09 |
| 10 | 0.665 | 11.966 | 8.767 |
| 13 | 0.580 | 8.596 | 8.238 |
| 16 | 1.358 | 9.014 | 8.39 |

Fig.13
Camera position error and pose error calculated using our algorithm


Fig.14
Comparison of position error and pose error between proposed algorithm and two types of PNP algorithms

Fig.15
Comparison of time consumption between proposed algorithm and ellipse fitting + two types of PNP algorithms in 18 experiments
| 1 | REDDY T. Analysis and CDNA microarray image segmentation based on Hough circle transform[J]. International Journal of Recent Technology and Engineering (IJRTE), 2019, 7(5c): 53-55. |
| 2 | 陈燕新, 戚飞虎. 一种新的基于随机Hough变换的椭圆检测方法[J]. 红外与毫米波学报, 2000, 19(1): 43-47. |
| CHEN Y X, QI F H. A new ellipse detection method using randomized Hough transform[J]. Journal of Infrared and Millimeter Waves, 2000, 19(1): 43-47 (in Chinese). | |
| 3 | DE MARCO T, CAZZATO D, LEO M, et al. Randomized circle detection with isophotes curvature analysis[J]. Pattern Recognition, 2015, 48(2): 411-421. |
| 4 | 屈稳太. 基于弦中点Hough变换的椭圆检测方法[J]. 浙江大学学报(工学版), 2005, 39(8): 1132-1135, 1196. |
| QU W T. Chord midpoint Hough transform based ellipse detection method[J]. Journal of Zhejiang University (Engineering Science), 2005, 39(8): 1132-1135, 1196 (in Chinese). | |
| 5 | 张汝祥, 陈德林, 季江伟, 等. 基于圆对称性和随机选点改进霍夫变换圆检测算法[J]. 科技创新与应用, 2019(14): 41-43. |
| ZHANG R X, CHEN D L, JI J W, et al. Improved Hough transform circle detection algorithm based on circle symmetry and random selection[J]. Technology Innovation and Application, 2019(14): 41-43 (in Chinese). | |
| 6 | 朱正伟, 宋文浩, 焦竹青, 等. 基于随机Hough变换改进的快速圆检测算法[J]. 计算机工程与设计, 2018, 39(7): 1978-1983. |
| ZHU Z W, SONG W H, JIAO Z Q, et al. Fast circle detection algorithm based on improved randomized Hough transform[J]. Computer Engineering and Design, 2018, 39(7): 1978-1983 (in Chinese). | |
| 7 | KIM E, HASEYAMA M, KITAJIMA H. Fast and robust ellipse extraction from complicated images[C]∥ Proceedings of the First International Conference on Information Technology and Applications. 2002: 357-362. |
| 8 | LU C S, XIA S Y, SHAO M, et al. Arc-support line segments revisited: An efficient high-quality ellipse detection[J]. IEEE Transactions on Image Processing, 2020, 29: 768-781. |
| 9 | MENG C, LI Z X, BAI X Z, et al. Arc adjacency matrix-based fast ellipse detection[J]. IEEE Transactions on Image Processing, 2020, 29: 4406-4420. |
| 10 | 徐伟高. 基于单目视觉的位姿测量关键技术研究[D]. 西安: 中国科学院大学(中国科学院西安光学精密机械研究所), 2016: 6-7. |
| XU W G. Key technology research on pose measurement based on monocular vision[D]. Xi’an: Xi’an Institute of Optics and Precision Mechanics, Chinese Academy of Sciences, 2016: 6-7 (in Chinese). | |
| 11 | 王波, 胡浩, 张彩霞, 等. P3P问题多解现象的普遍性[J]. 中国科学: 信息科学, 2017, 47(4): 482-491. |
| WANG B, HU H, ZHANG C X, et al. Generality of the multi-solution phenomenon in the P3P problem[J]. Scientia Sinica (Informationis), 2017, 47(4): 482-491 (in Chinese). | |
| 12 | BUJNAK M, KUKELOVA Z, PAJDLA T. A general solution to the P4P problem for camera with unknown focal length[C]∥ 2008 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2008: 1-8. |
| 13 | ABDEL-AZIZ Y I, KARARA H M. Direct linear transformation into object space coordinates in close-range photogrammetry[C]∥Proceedings of Symp. Close-Range Photogrammetry, 1971: 1-18. |
| 14 | LU C P, HAGER G D, MJOLSNESS E. Fast and globally convergent pose estimation from video images[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(6): 610-622. |
| 15 | MORENO-NOGUER F, LEPETIT V, FUA P. Accurate non-iterative O(n) solution to the PnP problem[C]∥ 2007 IEEE 11th International Conference on Computer Vision. Piscataway: IEEE Press, 2007: 1-8. |
| 16 | HESCH J A, ROUMELIOTIS S I. A direct least-squares (DLS) method for PnP[C]∥ 2011 International Conference on Computer Vision. Piscataway: IEEE Press, 2012: 383-390. |
| 17 | 温卓漫. 复杂场景下合作靶标的准确快速识别与定位[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2017. |
| WEN Z M. Accurate and fast identification and localization of A cooperative target in complex background[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2017 (in Chinese). | |
| 18 | 刘传凯, 李东升, 王俊魁, 等. 基于双目椭圆特征的月面采样机械臂末端位姿精确测量方法[J]. 中国科学: 技术科学, 2021, 51(12): 1453-1464. |
| LIU C K, LI D S, WANG J K, et al. Precise pose measurement of lunar sampling manipulator based on binocular ellipse feature[J]. Scientia Sinica (Technologica), 2021, 51(12): 1453-1464 (in Chinese). | |
| 19 | 李大明, 饶炜, 胡成威, 等. 空间站机械臂关键技术研究[J]. 载人航天, 2014, 20(3): 238-242. |
| LI D M, RAO W, HU C W, et al. Key technology review of the research on the space station manipulator[J]. Manned Spaceflight, 2014, 20(3): 238-242 (in Chinese). | |
| 20 | 温卓漫, 王延杰, 邸男, 等. 基于合作靶标的在轨手眼标定[J]. 仪器仪表学报, 2014, 35(5): 1005-1012. |
| WEN Z M, WANG Y J, DI N, et al. On-orbit hand-eye calibration using cooperative target[J]. Chinese Journal of Scientific Instrument, 2014, 35(5): 1005-1012 (in Chinese). | |
| 21 | 通过末端执行器与目标适配器之间的对接与分离,中国空间站机械臂可以实现舱外大范围爬行,辅助航天员出舱活动[EB/OL]. . |
| Through the docking and separation between the end effector and the target adapter, the robotic arm of the Chinese space station can achieve a wide range of extravehicular crawling and assist astronauts in extravehicular activities[EB/OL]. (in Chinese). | |
| 22 | LI G, CAO C C, GE J, et al. Defects detection of pharmaceutical blister packaging based on shape template matching[J]. Applied Mechanics and Materials, 2015, 731: 426-429. |
| [1] | Sheng XU, Ming CHU, Shaoqi LIN, Rui CHANG, Hanxu SUN. Dynamic parameter identification without excitation for non-cooperative targets post soft capture [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 228342-228342. |
| [2] | Ming CHU, Shaoqi LIN, Sheng XU, Rui CHANG. Design and simulation of omnidirectional compliant docking joint for space non-cooperative target [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(13): 428024-428024. |
| [3] | Bin CHEN, Houyin XI, Xiaodong ZHANG, Min LUO, Zhidong GUO. Point cloud registration of space non-cooperative targets based on geodesic distance [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 326336-326336. |
| [4] | WANG Zi, SUN Xiaoliang, LI Zhang, CHENG Zilong, YU Qifeng. Transformer based monocular satellite pose estimation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(5): 325298-325298. |
| [5] | XIA Pengcheng, LUO Jianjun, WANG Mingming, TAN Longyu. Coordinated stabilization control for dual-arm space robot capturing a non-cooperative target [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(2): 325398-325398. |
| [6] | JIA Qingxuan, DUAN Jiaqi, CHEN Gang. Uncalibrated visual servo of space robots performing on-orbit assembly alignment task [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(6): 424063-424063. |
| [7] | SUN Bowen, WANG Dayi, WANG Jiongqi, ZHOU Haiyin, GE Dongming, DONG Tianshu. Filter method for dimension reduction in spacecraft autonomous navigation based on sequence image [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(4): 524971-524971. |
| [8] | MU Jinzhen, LIU Zongming, HAN Fei, ZHOU Yan, LI Shuang. Long-range relative pose estimation and optimization of a failure satellite [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524959-524959. |
| [9] | CHU Weimeng, YANG Jinzhao, WU Shu'nan, WU Zhigang. LSTM-based on-orbit identification of inertia tensor for space robot system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524615-524615. |
| [10] | LIU Jinglong, ZHANG Chongfeng, ZOU Huaiwu, LI Ning, WU Linna. On-orbit precise operation control method for flexible joint space robots based on disturbance observer [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(1): 523899-523899. |
| [11] | HAN Fei, LIU Fucheng, WANG Zhaolong, DU Xuan, LIU Shanshan, LIU Chaozhen. Multiple line-of-sight angles-only relative navigation by multiple collaborative space robots [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(1): 524174-524174. |
| [12] | MENG Guang, HAN Liangliang, ZHANG Chongfeng. Research progress and technical challenges of space robot [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(1): 523963-523963. |
| [13] | LI Wenhao, ZHANG Heng, FENG Guanhua. Cooperative teleoperation for multi-master/multi-slave systems with large time-varying delays [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(1): 523896-523896. |
| [14] | ZHOU Yiqun, LUO Jianjun, WANG Mingming. Load distribution for space robots after target capture [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(1): 523915-523915. |
| [15] | GE Jiahao, LIU Li, DONG Xinxin, TIAN Weiyong, LU Tianhe. Trajectory planning for free floating space robots based on kinodynamic RRT* [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(1): 523877-523877. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341