陈谋, 甄子涵, 姜斌( )
)
收稿日期:2026-01-16
修回日期:2026-02-12
接受日期:2026-03-09
出版日期:2026-03-24
发布日期:2026-03-24
通讯作者:
姜斌
E-mail:binjiang@nuaa.edu.cn
基金资助:
Mou CHEN, Zihan ZHEN, Bin JIANG()
Received:2026-01-16
Revised:2026-02-12
Accepted:2026-03-09
Online:2026-03-24
Published:2026-03-24
Contact:
Bin JIANG
E-mail:binjiang@nuaa.edu.cn
Supported by:摘要:
低空经济作为新质生产力的代表性产业之一,不仅可以创造新的经济增长点,还能带动低空制造、低空飞行、低空保障以及综合服务等多个相关产业的发展,对推动经济增长和促进科技创新等具有多重重要意义。低空无人机智能避障决策与安全控制是保证低空无人机高效安全运输的前提条件,因此是低空经济领域近年来的研究热点之一。基于国内外现有的研究成果,综述了低空无人机智能避障决策与安全控制技术的研究现状并展望了未来发展方向。主要从低空无人机安全避障决策,安全航路规划,卫星信号拒止下的低空无人机安全控制,干扰下低空无人机安全控制,以及多约束下低空无人机安全控制几个方面,综述了目前已解决的关键技术。最后,对低空无人机智能避障决策与安全控制的未来研究方向进行了展望。
中图分类号:
陈谋, 甄子涵, 姜斌. 低空无人机智能避障决策与安全控制技术综述[J]. 航空学报, 2026, 47(9): 533388.
Mou CHEN, Zihan ZHEN, Bin JIANG. Overview of intelligent obstacle avoidance decision-making and safety control technologies for low-altitude UAV[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 533388.

图 1
低空无人机智能避障决策与安全控制技术
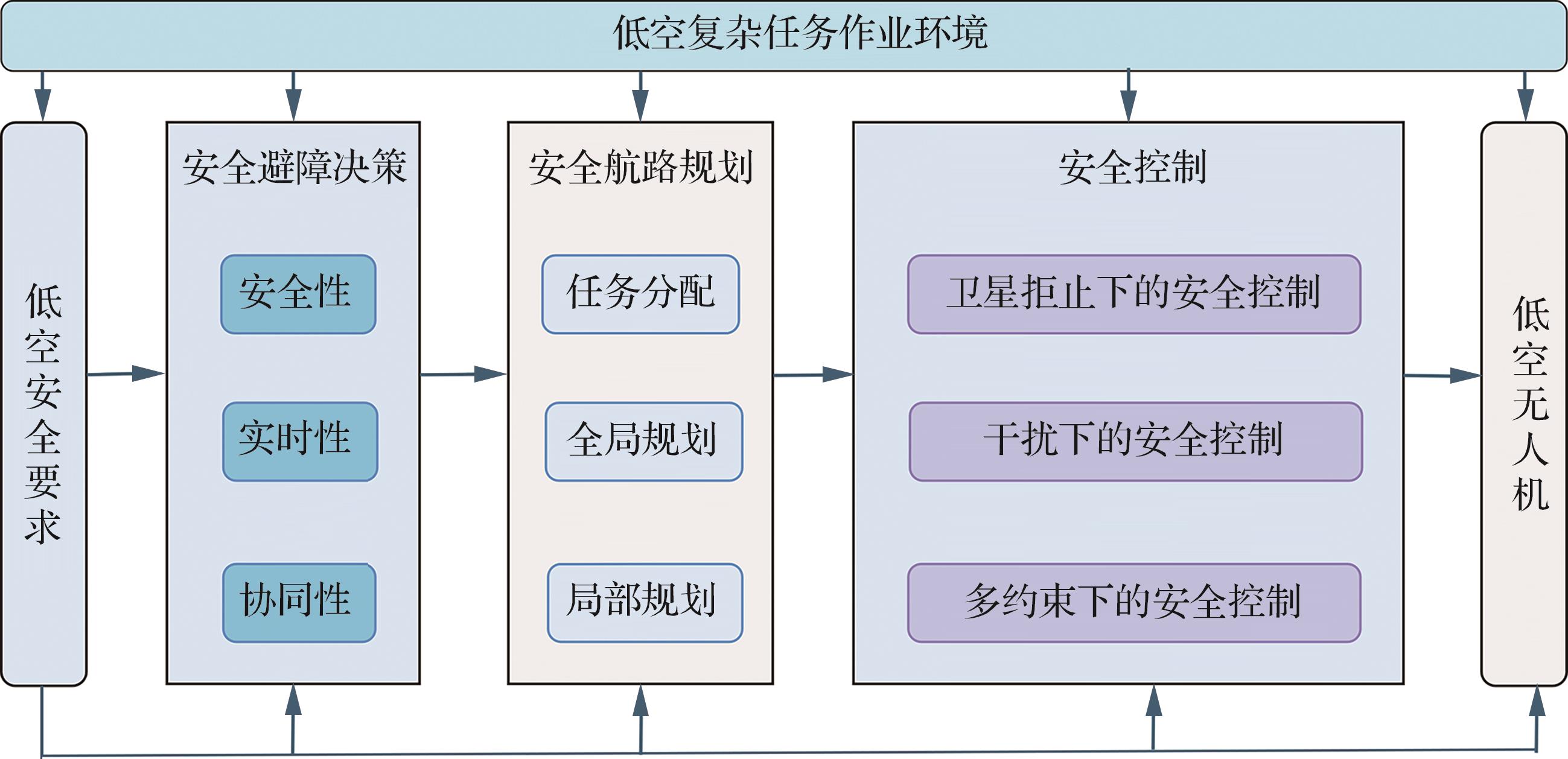

图 2
低空无人机安全避障决策技术
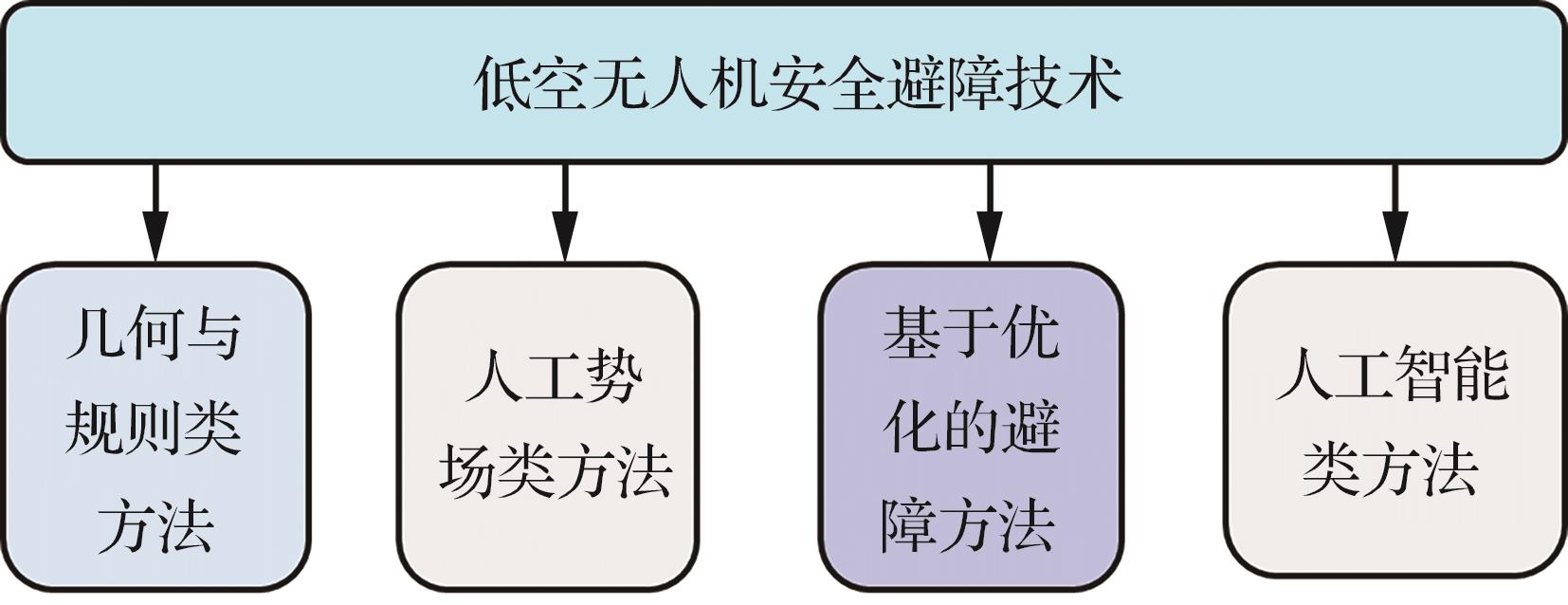
表1
低空无人机安全避障决策技术总结
| 避障决策技术 | 核心思想 | 存在问题 | 适用场景 | 代表性方法 |
|---|---|---|---|---|
| 几何与规则类方法 | 通过几何推理或算法预定义的规则进行避障 | 易出现振荡现象 | 障碍物明确、需强实时响应的飞行避障 | VO[ |
方法 人工势场类 | 将目标、障碍、其他机体等分别建模为不同类型的势场,通过合力方向进行避障决策 | 局部极小值、目标不可达问题 | 常用于低速飞行避障或编队队形保持 | APF及其衍生算法[ |
| 基于优化的避障决策方法 | 将避障问题建模为优化问题中的约束,嵌入优化算法进行求解 | 复杂环境中优化问题的可解性与计算量消耗问题 | 障碍物约束明确、需综合性能权衡的场景 | CBF[ |
方法 基于人工智能的避障决策 | 能够通过学习环境特征、运动模式和策略经验,进行自主避障决策 | 训练数据集难获取、算法可解释性问题 | 环境不确定性高、规则难以设计的低空避障场景 | 端到端网络[ |

图 3
低空单无人机安全航路规划技术
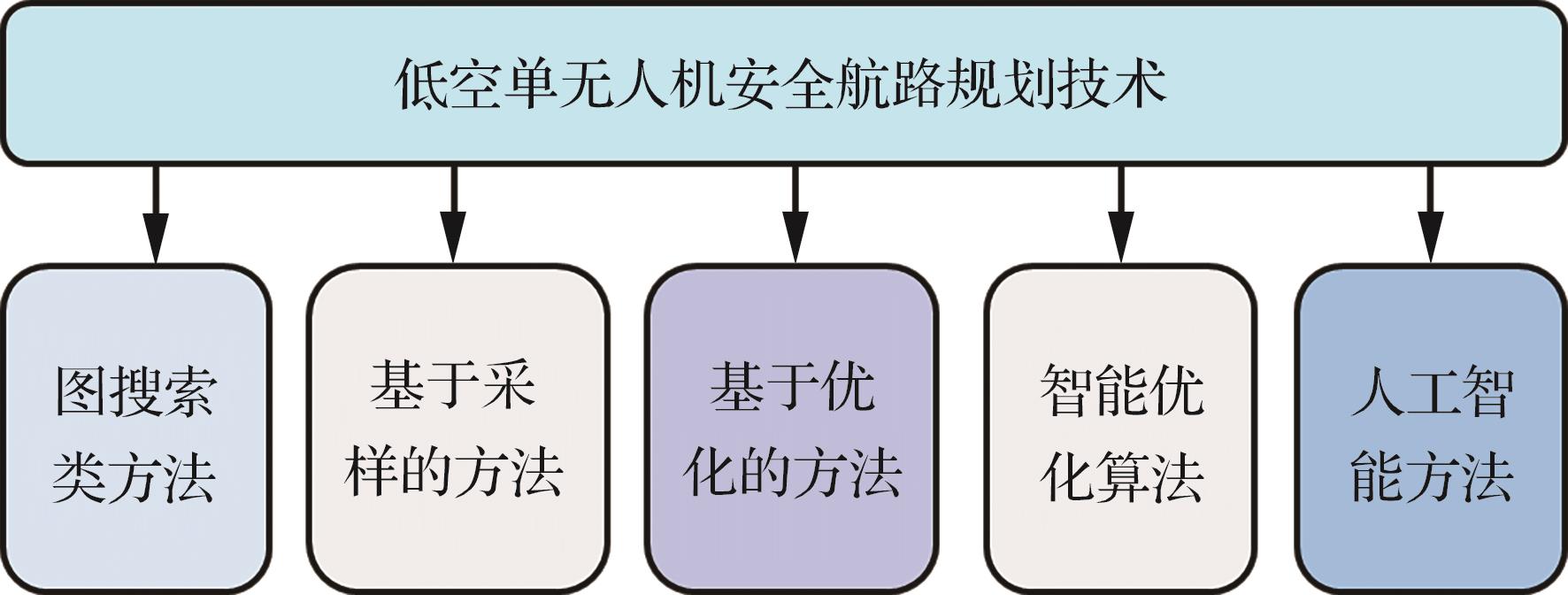
表2
低空单无人机安全航路规划技术总结
| 航路规划技术 | 核心思想 | 存在问题 | 适用场景 | 代表性方法 |
|---|---|---|---|---|
| 图搜索类算法 | 将环境离散为栅格或图结构,航路规划转化为路径搜索问题 | 复杂场景计算开销大,不易适应动态环境 | 结构化、可精确建模的全局场景 | A*[ |
| 采样类算法 | 通过随机采样,构建可行路径连通图,实现航路规划 | 航迹通常需进行后处理以满足光滑性和动力学约束 | 障碍结构复杂或未知/非结构化环境 | RRT[ |
方法 基于优化的 | 将航路生成问题转化为具有明确目标函数和约束条件的数学优化问题 | 复杂优化问题的可解性与计算量消耗问题 | 满足安全约束、追求轨迹质量的场景 | 文献[ |
| 智能优化算法 | 基于自然或生物启发,通过迭代在解空间进行大量搜索,在多目标下寻优 | 计算消耗较大,实时性不强,且需要避免陷入局部极值点 | 多目标且问题非凸的全局航路规划,尤其适合离线规划 | 遗传算法、粒子群算法[ |
| 人工智能方法 | 通过学习环境特征、运动模式和策略经验,自主进行飞行决策 | 训练数据集难获取、算法可解释性问题 | 未知环境、动态威胁与强时变场景 | 强化学习[ |
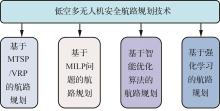
图 4
低空多无人机安全航路规划技术
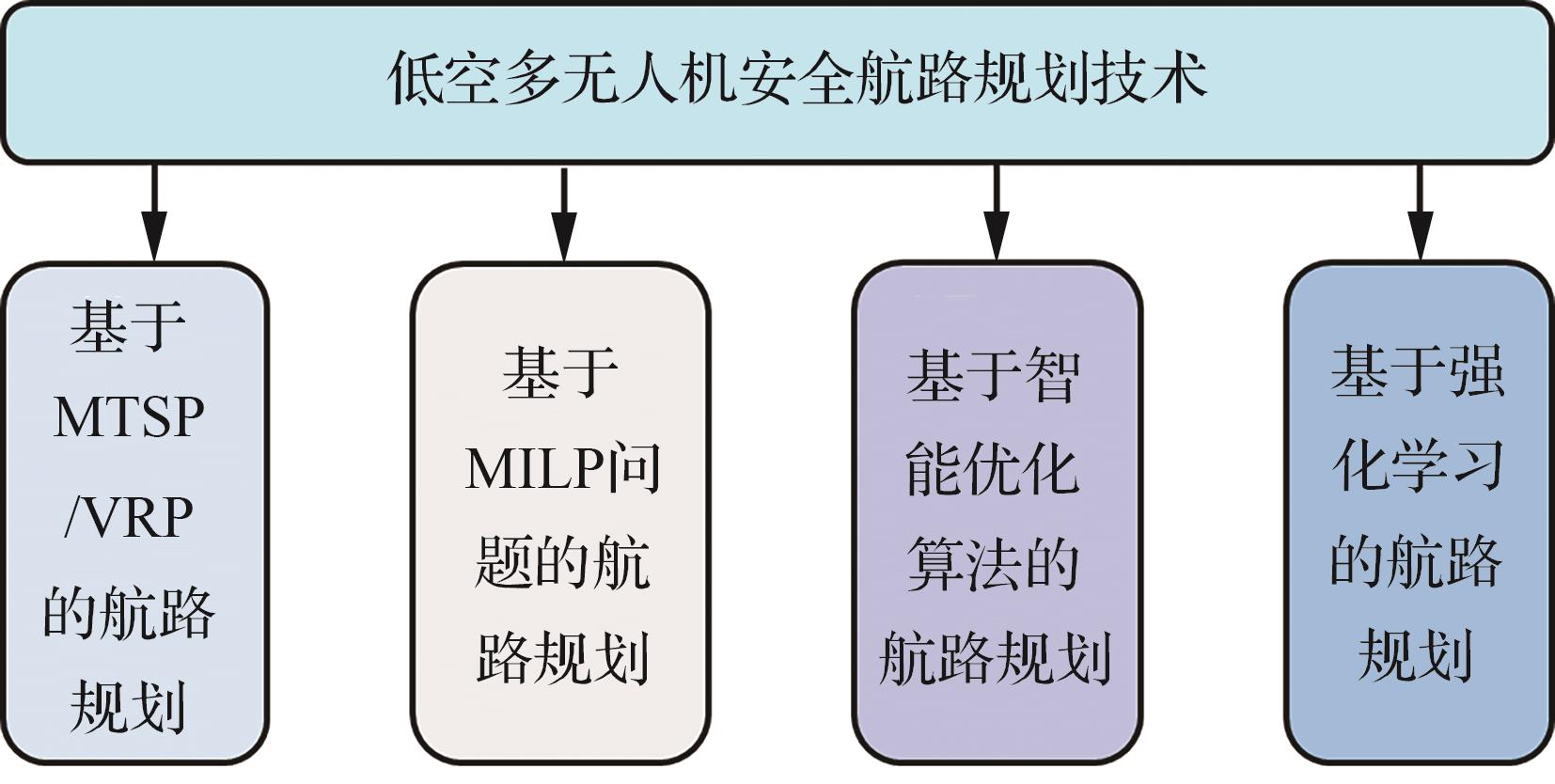
图 5
低空卫星信号拒止环境下单无人机控制技术
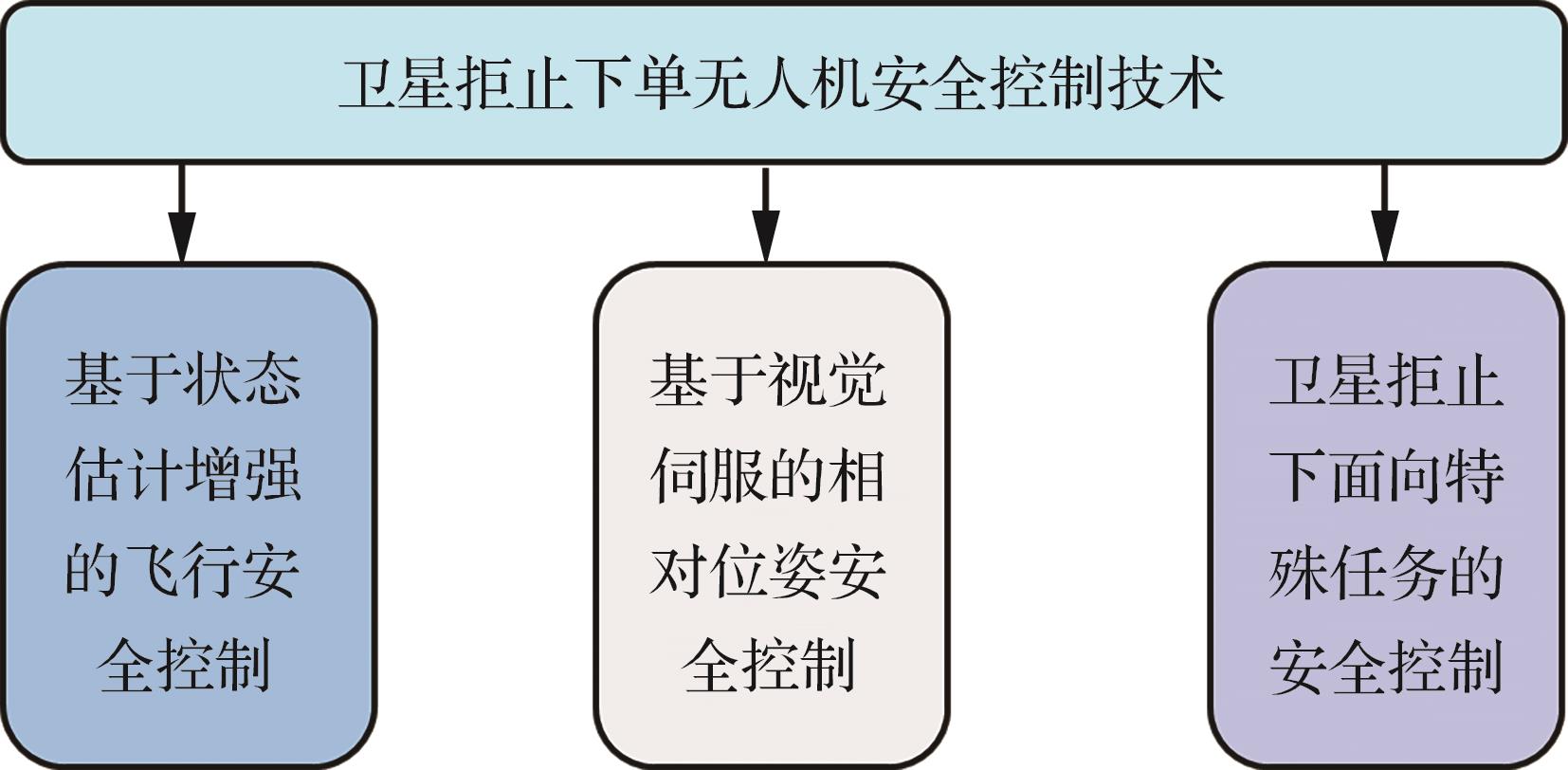
表3
卫星信号拒止环境下的低空无人机安全控制
| 方法分类 | 代表性方法 | 核心思想 | 特点 | 适用场景 |
|---|---|---|---|---|
| 基于状态估计增强的方法 | 激光SLAM | 通过激光雷达扫描生成点云数据,通过点云匹配进行定位和建图 | 精度高、不受光线影响,但对点云退化场景和计算资源有要求 | 光照不足/纹理贫乏但几何结构明显场景如地下管廊、隧道等 |
| 视觉SLAM | 通过视觉传感器捕捉环境特征,分析并计算自身位置与姿态 | 硬件成本低、光照好时信息丰富,但对光线敏感 | 光照较好、有纹理特征的场景 | |
| 视觉/激光雷达与惯性测量单元(IMU)融合 | 结合视觉/激光雷达的高精度环境感知与IMU的快速运动估计 | 优势互补,稳定性与精度较高,算法设计复杂度高 | 复杂工业场景、算力与载荷资源较充足的平台 | |
| 超宽带(UWB)定位 | 通过与部署的基站之间的相对信号和飞行时间进行定位 | 定位延迟低、精度高,对基站质量要求高 | 可预先部署基站的固定场所 | |
| 视觉伺服类方法 | 基于位置的视觉伺服(PBVS) | 将图像特征通过相机模型反投影到三维空间,计算目标的位姿,生成误差信号 | 控制量物理意义明确,但需精准相机标定 | 适用于目标模型已知、标定精确且需直接控制三维位姿的任务,如精确悬停、对接与着陆 |
| 基于图像的视觉伺服(IBVS) | 直接在图像空间定义误差,通过雅克比矩阵将图像误差映射为无人机运动特征 | 对模型误差鲁棒性强,需实时计算雅克比矩阵 | 适用于特征稳定、需保持目标在视场内的近距跟踪与引导场景,对精确模型依赖较低 | |
| 混合视觉伺服(HVS) | 部分特征采用位置反馈,另一部分采用图像特征反馈 | 结合两者优点,综合性能较好,但算法设计复杂度较高 | 适用于需同时保证视场约束与位姿精度的复杂视觉引导任务 |
图 6
低空卫星信号拒止环境下多无人机控制技术
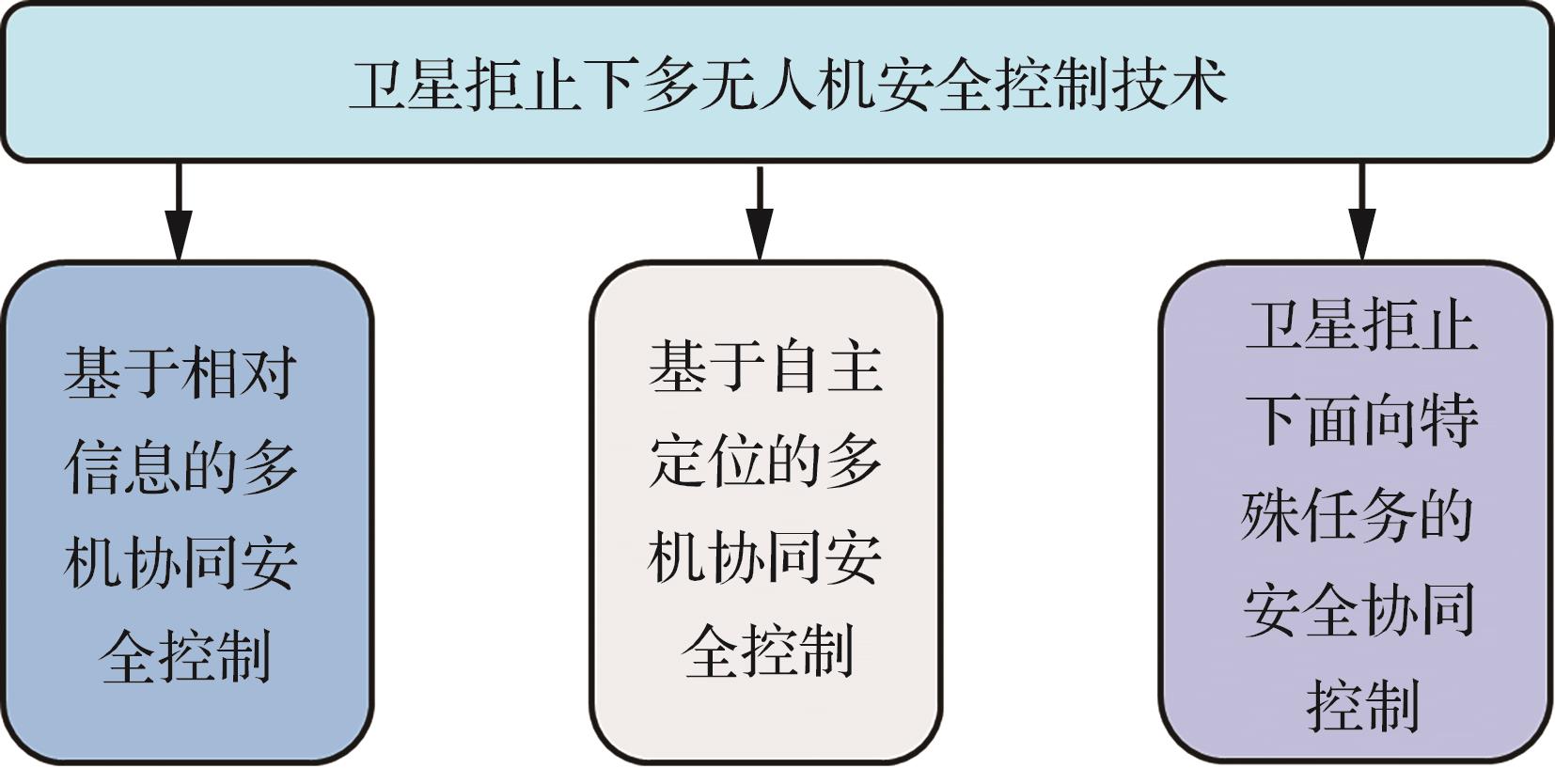
图 7
低空单无人机抗干扰安全控制技术
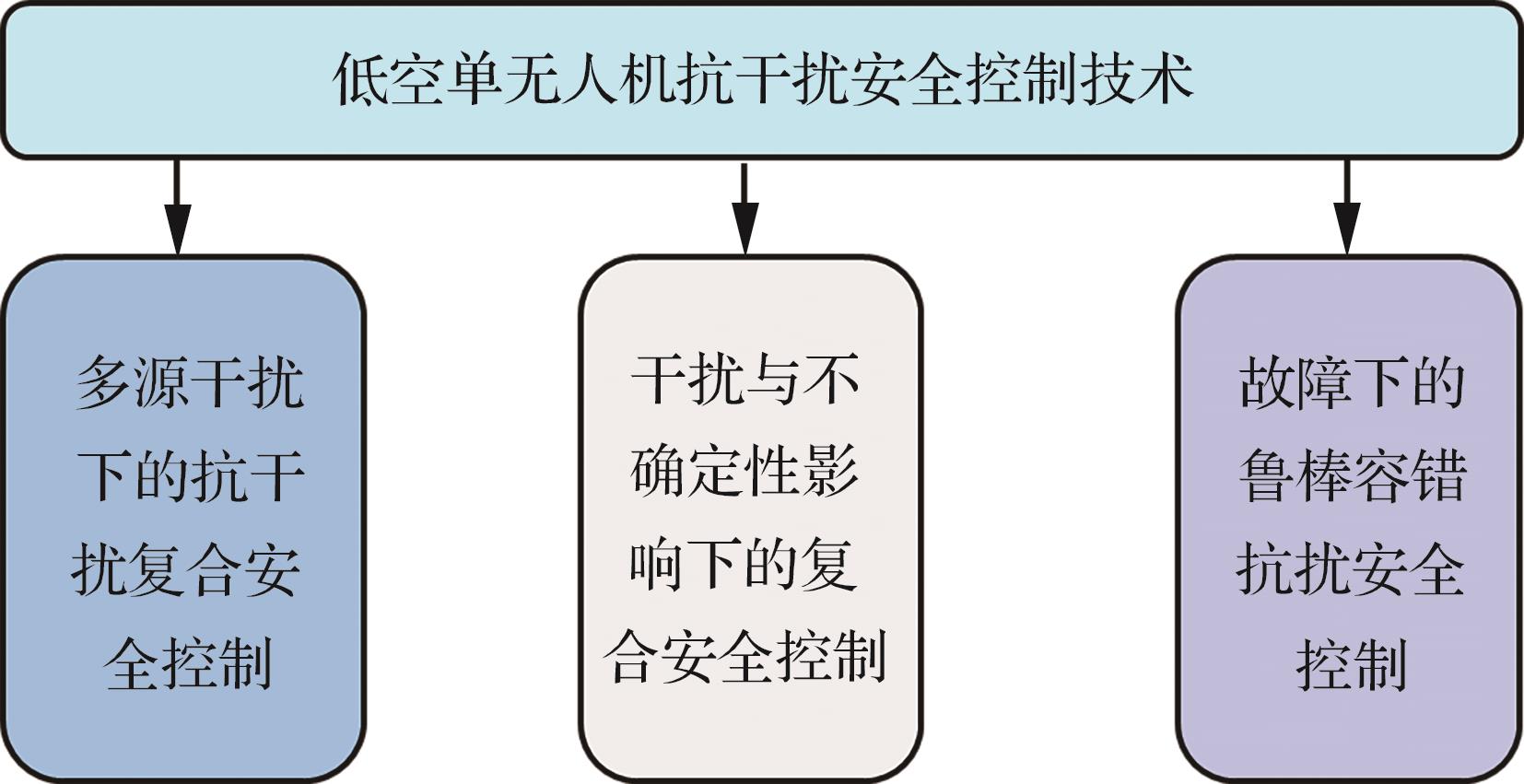
图 8
低空多无人机抗干扰安全控制技术
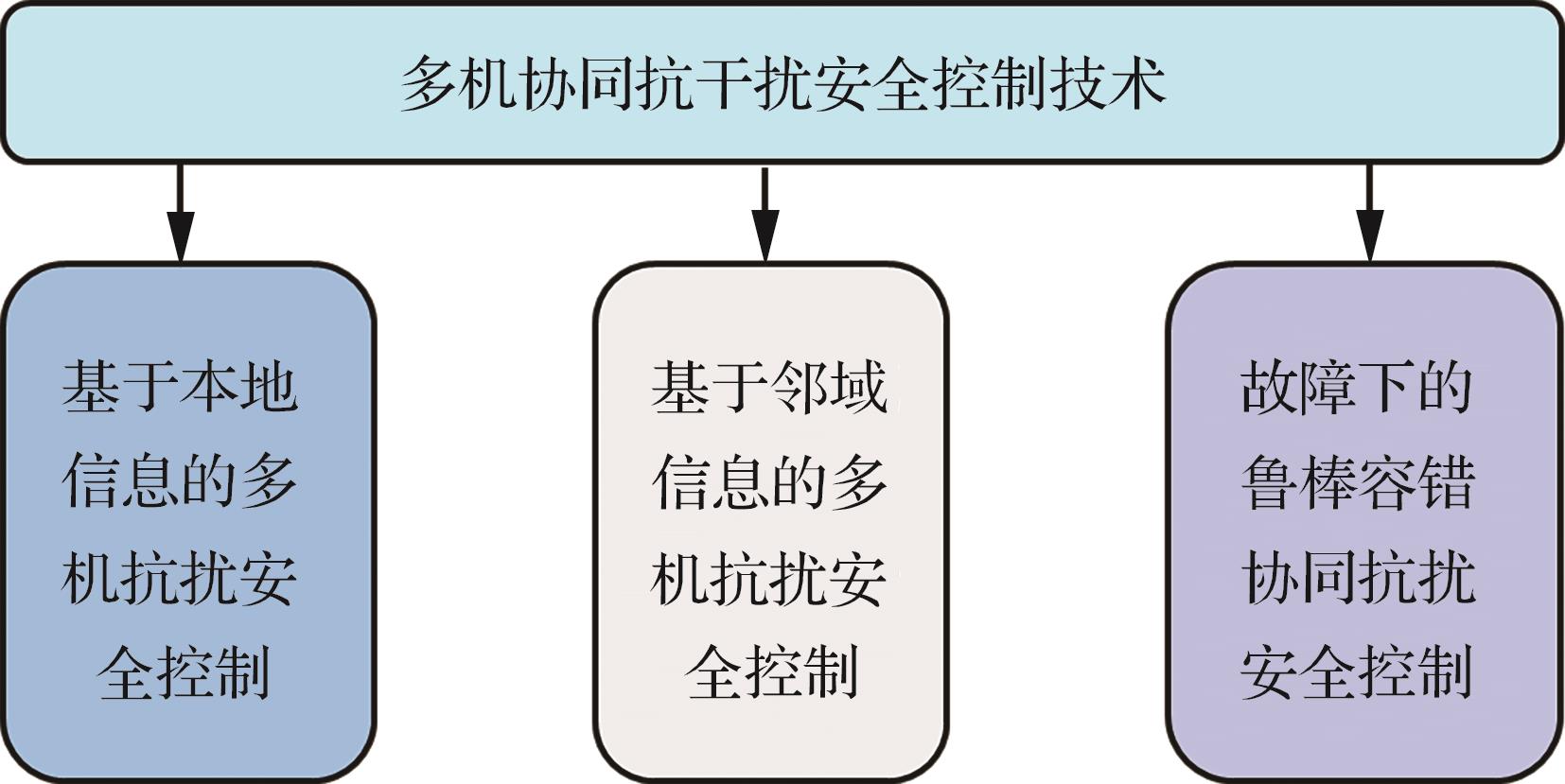
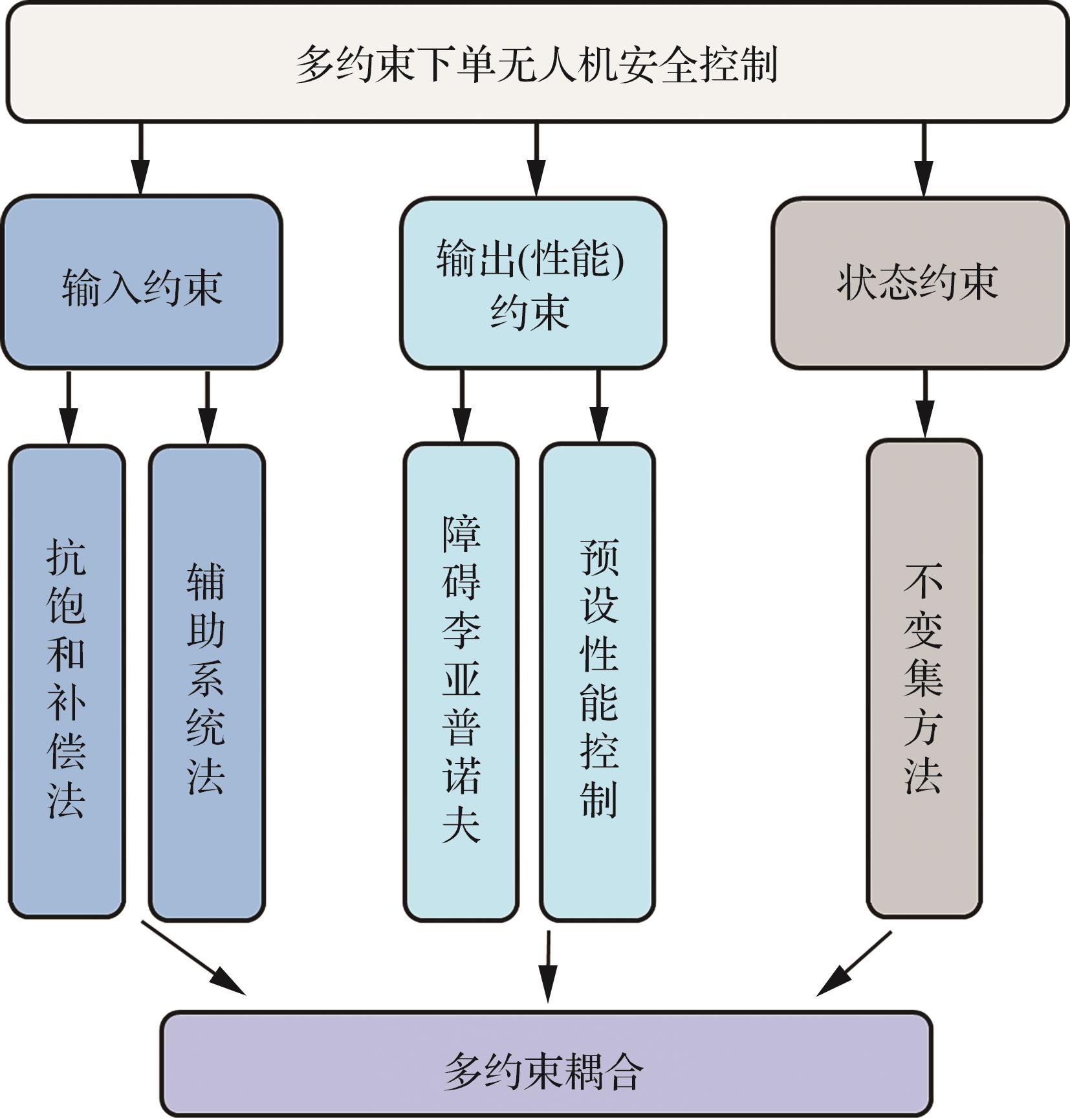
图 9
低空无人机控制约束类型
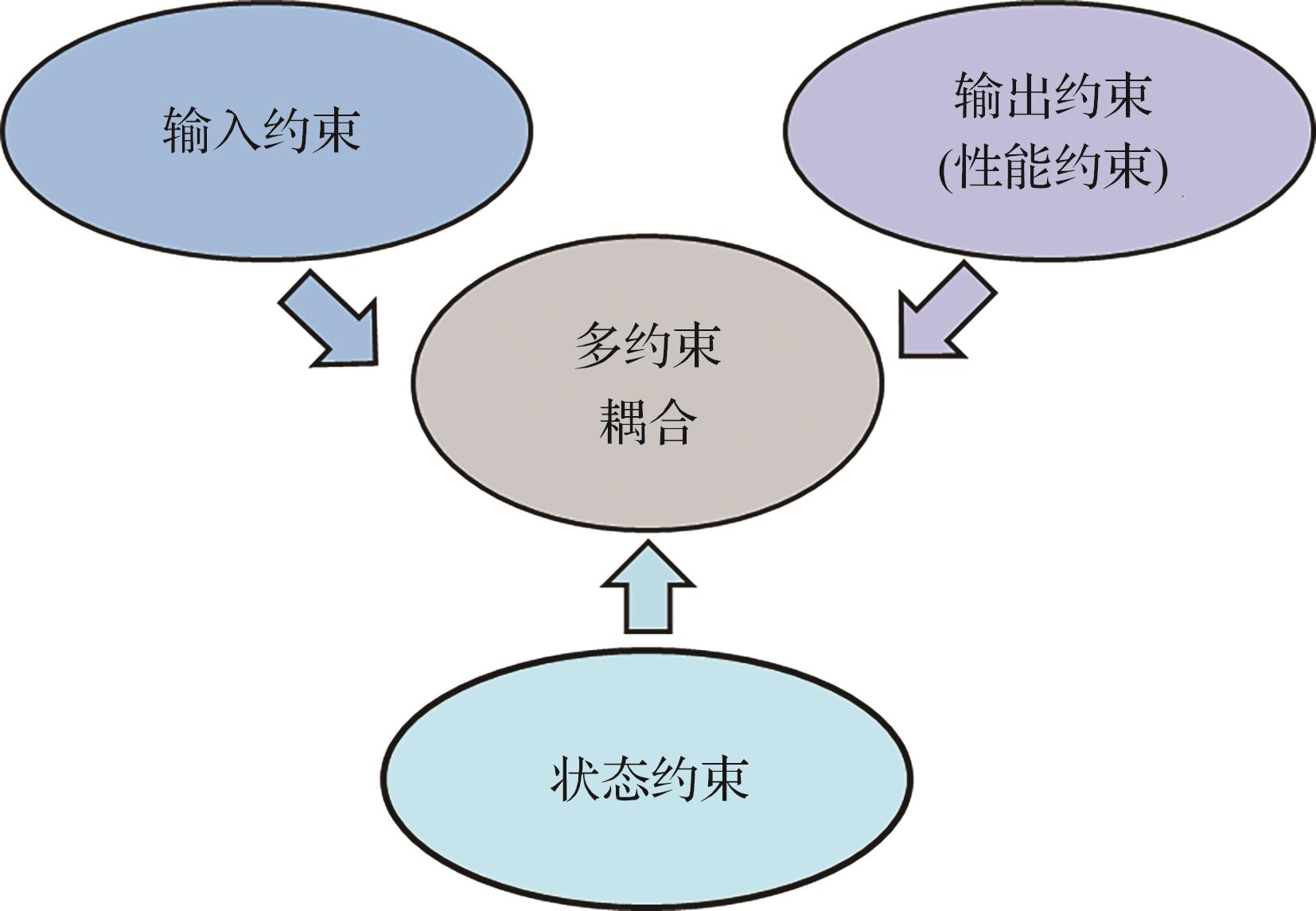
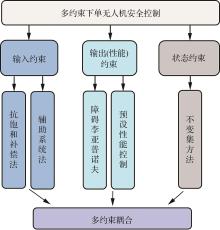
图 10
多约束下低空单无人机安全控制技术
| [1] | 马涛. 2025中国战略性新兴产业和未来产业发展报告:培育壮大新兴产业未来产业 优化重大生产力布局[J]. 哈尔滨工业大学学报(社会科学版), 2026, 28(2): 144-160. |
| MA T. China’s strategic emerging industries and future industries development report 2025: Cultivating and expanding emerging and future industries and optimizing the spatial layout of major productive forces[J]. Journal of Harbin Institute of Technology(Social Sciences Edition), 2026, 28(2): 144-160 (in Chinese). | |
| [2] | 沈映春. 低空经济: “飞”出新赛道[J]. 人民论坛, 2024(8): 74-79. |
| SHEN Y C. Low-altitude economy: “Flying” out of the new track[J]. People’s Tribune, 2024(8): 74-79 (in Chinese). | |
| [3] | 廖望, 曹小曙, 袁立洋, 等. 国内外低空经济研究脉络与进展评述: 基于CiteSpace的可视化分析[J]. 热带地理, 2025, 45(6): 937-953. |
| LIAO W, CAO X S, YUAN L Y, et al. Context and progress of domestic and international low-altitude economic research: Based on the CiteSpace software[J]. Tropical Geography, 2025, 45(6): 937-953 (in Chinese). | |
| [4] | 庄茁. 人工智能赋能低空经济: 应用场景与未来方向[J]. 人民论坛·学术前沿, 2024(15): 38-44. |
| ZHUANG Z. AI empowers low-altitude economy: Application scenarios and future directions[J].Frontiers, 2024(15): 38-44 (in Chinese). | |
| [5] | 张晓兰, 黄伟熔. 低空经济发展的全球态势、我国现状及促进策略[J]. 经济纵横, 2024(8): 53-62. |
| ZHANG X L, HUANG W R. Development of low-altitude economy: Global trend, China’s current situation, and promotion measures[J]. Economic Review, 2024(8): 53-62 (in Chinese). | |
| [6] | 樊邦奎, 李云, 张瑞雨. 浅析低空智联网与无人机产业应用[J]. 地理科学进展, 2021, 40(9): 1441-1450. |
| FAN B K, LI Y, ZHANG R Y. Initial analysis of low-altitude internet of intelligences (IOI)and the applications of unmanned aerial vehicle industry[J]. Progress in Geography, 2021, 40(9): 1441-1450 (in Chinese). | |
| [7] | 胡文晓, 牟迪, 李智, 等. 以关键技术问题创新引领低空经济发展对策研究[J]. 航空学报, 2025, 46(9): 531539. |
| HU W X, MOU D, LI Z, et al. Strategies for promoting low-altitude economy development driven by innovation in key technical issues[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 531539 (in Chinese). | |
| [8] | 欧宇, 陈静, 唐晓云, 等. 低空经济高技能人才培养: 产业需求与布局方向(笔谈)[J]. 中国职业技术教育, 2025(9): 5-16. |
| OU Y, CHEN J, TANG X Y, et al. The cultivation of skilled talents for the low-altitude economy: Industrial demand and strategic directions(written discussion)[J]. Chinese Vocational and Technical Education, 2025(9): 5-16 (in Chinese). | |
| [9] | REZAEE M R, HAMID N A W A, HUSSIN M, et al. Comprehensive review of drones collision avoidance schemes: Challenges and open issues[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(7): 6397-6426. |
| [10] | FIORINI P, SHILLER Z. Motion planning in dynamic environments using velocity obstacles[J]. The International Journal of Robotics Research, 1998, 17(7): 760-772. |
| [11] | 郭华, 郭小和. 改进速度障碍法的无人机局部路径规划算法[J]. 航空学报, 2023, 44(11): 327586. |
| GUO H, GUO X H. Local path planning algorithm for UAV based on improved velocity obstacle method[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(11): 327586 (in Chinese). | |
| [12] | LIANG Y X, WANG H, LIU X, et al. A dynamic obstacle avoidance algorithm for unmanned aerial vehicles based on predictive velocity obstacles[J]. Robotics and Autonomous Systems, 2026, 196: 105250. |
| [13] | WAKABAYASHI T, SUZUKI Y, SUZUKI S. Dynamic obstacle avoidance for Multi-rotor UAV using chance-constraints based on obstacle velocity[J]. Robotics and Autonomous Systems, 2023, 160: 104320. |
| [14] | BORENSTEIN J, KOREN Y. The vector field histogram-fast obstacle avoidance for mobile robots[J]. IEEE Transactions on Robotics and Automation, 1991, 7(3): 278-288. |
| [15] | DING K Y, CHEN M, YONG K N. Self-adjusting angular resolution-based obstacle avoidance for inspection unmanned aerial vehicles in nuclear power stations[C]∥ 2022 41st Chinese Control Conference (CCC). Piscataway: IEEE Press, 2022: 3730-3735. |
| [16] | ULRICH I, BORENSTEIN J. VFH+: Reliable obstacle avoidance for fast mobile robots[C]∥ Proceedings of 1998 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2002: 1572-1577. |
| [17] | ULRICH I. VFH*: local obstacle avoidance with look-ahead verification[C]∥ Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2000, 2505-2511. |
| [18] | HOU X L, LI Z Y, PAN Q. Autonomous navigation of a multirotor robot in GNSS-denied environments for search and rescue[J]. Science China Information Sciences, 2023, 66(3): 139203. |
| [19] | KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots[J]. The International Journal of Robotics Research, 1986, 5(1): 90-98. |
| [20] | BUTT M Z, NASIR N, A. RASHID R B. A review of perception sensors, techniques, and hardware architectures for autonomous low-altitude UAVs in non-cooperative local obstacle avoidance[J]. Robotics and Autonomous Systems, 2024, 173: 104629. |
| [21] | FAN X J, GUO Y J, LIU H, et al. Improved artificial potential field method applied for AUV path planning[J]. Mathematical Problems in Engineering, 2020, 2020(1): 6523158. |
| [22] | LI M R, QUAN L G, LI Q S, et al. UAV obstacle avoidance path planning based on improved artificial potential field method[C]∥ 2024 International Conference on Advanced Control Systems and Automation Technologies (ACSAT). Piscataway: IEEE Press, 2025: 255-258. |
| [23] | HE X, BOURNE J R, STEINER J A, et al. Autonomous chemical-sensing aerial robot for urban/suburban environmental monitoring[J]. IEEE Systems Journal, 2019, 13(3): 3524-3535. |
| [24] | ZHOU X, WANG Z P, YE H K, et al. EGO-planner: An ESDF-free gradient-based local planner for quadrotors[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 478-485. |
| [25] | 姚绍杰, 闫帅明, 张浩, 等. 无人机系统安全控制研究综述: 控制障碍函数[J]. 控制与决策, 2024, 39(10): 3169-3180. |
| YAO S J, YAN S M, ZHANG H, et al. Review of safety control research in unmanned aerial vehicle systems: Control barrier functions[J]. Control and Decision, 2024, 39(10): 3169-3180 (in Chinese). | |
| [26] | 洪瑞阳, 方洋旺, 野汶博, 等. 基于高阶控制障碍函数的无人机避障制导[J]. 火力与指挥控制, 2025, 50(6): 137-143. |
| HONG R Y, FANG Y W, YE W B, et al. Obstacle avoidance guidance for UAV based on higher-order control barrier functions[J]. Fire Control Command Control, 2025, 50(6): 137-143 (in Chinese). | |
| [27] | SHAYAN Z, IZADI M, SCOGNAMIGLIO V, et al. Exponential control barrier function and model predictive control for jerk-level reactive motion planning of quadrotors[J]. Control Engineering Practice, 2025, 164: 106489. |
| [28] | LOQUERCIO A, KAUFMANN E, RANFTL R, et al. Deep drone racing: From simulation to reality with domain randomization[J]. IEEE Transactions on Robotics, 2020, 36(1): 1-14. |
| [29] | ZHANG Y A, HU Y, SONG Y L, et al. Learning vision-based agile flight via differentiable physics[J]. Nature Machine Intelligence, 2025, 7(6): 954-966. |
| [30] | WANG F, ZHU X P, ZHOU Z, et al. Deep-reinforcement-learning-based UAV autonomous navigation and collision avoidance in unknown environments[J]. Chinese Journal of Aeronautics, 2024, 37(3): 237-257. |
| [31] | SUN T, GU J J, MOU J J. UAV autonomous obstacle avoidance via causal reinforcement learning[J]. Displays, 2025, 87: 102966. |
| [32] | YAN C, SUN Y H, JIANG Y N, et al. Selective imitation enhanced deep reinforcement learning for AAV navigation and obstacle avoidance with sparse rewards[J]. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(8): 12358-12371. |
| [33] | VAN DEN BERG J, LIN M, MANOCHA D. Reciprocal velocity obstacles for real-time multi-agent navigation[C]∥ 2008 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2008: 1928-1935. |
| [34] | SNAPE J, VAN DEN BERG J, GUY S J, et al. The hybrid reciprocal velocity obstacle[J]. IEEE Transactions on Robotics, 2011, 27(4): 696-706. |
| [35] | VAN DEN BERG J, GUY S J, LIN M, et al. Reciprocal n-body collision avoidance[C]∥ Robotics Research. Berlin: Springer, 2011: 3-19. |
| [36] | CHANG X C, WANG J Y, LI K, et al. Research on multi-UAV autonomous obstacle avoidance algorithm integrating improved dynamic window approach and ORCA[J]. Scientific Reports, 2025, 15: 14646. |
| [37] | WANG W N, QIAN H M. A hierarchical ORCA framework for Multi-UAV navigation in unstructured environments with velocity optimization and local minima avoidance[J]. Expert Systems with Applications, 2026, 296: 129205. |
| [38] | LI M H, HUANG Z J, BI W H, et al. A fish evasion behavior-based vector field histogram method for obstacle avoidance of multi-UAVs[J]. Aerospace Science and Technology, 2025, 159: 109974. |
| [39] | FU X W, ZHI C Y, WU D. Obstacle avoidance and collision avoidance of UAV swarm based on improved VFH algorithm and information sharing strategy[J]. Computers Industrial Engineering, 2023, 186: 109761. |
| [40] | SHENG H L, ZHANG J, YAN Z Y, et al. New multi-UAV formation keeping method based on improved artificial potential field[J]. Chinese Journal of Aeronautics, 2023, 36(11): 249-270. |
| [41] | BAI T T, TANG W, LIU Y, et al. UAV formation cooperative obstacle avoidance based on improved APF method under variable topology[J]. Science China Technological Sciences, 2025, 68(9): 1920403. |
| [42] | 秦明星, 王忠, 李海龙, 等. 基于分布式模型预测的无人机编队避障控制[J]. 北京航空航天大学学报, 2024, 50(6): 1969-1981. |
| QIN M X, WANG Z, LI H L, et al. Obstacle avoidance control of UAV formation based on distributed model prediction[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(6): 1969-1981 (in Chinese). | |
| [43] | 胡树欣, 张安, 孙嫚憶, 等. 基于一致性理论和S-MPC的四旋翼编队协同避障[J]. 系统工程与电子技术, 2024, 46(2): 658-667. |
| HU S X, ZHANG A, SUN M Y, et al. Obstacles avoidance for quadrotor formation based on consensus theory and S-MPC[J]. Systems Engineering and Electronics, 2024, 46(2): 658-667 (in Chinese). | |
| [44] | PUENTE-CASTRO A, RIVERO D, PEDROSA E, et al. Q-learning based system for path planning with unmanned aerial vehicles swarms in obstacle environments[J]. Expert Systems with Applications, 2024, 235: 121240. |
| [45] | ZHENG Y S. Autonomous navigation and control method of UAV swarm based on deep reinforcement learning[J]. Procedia Computer Science, 2025, 261: 870-878. |
| [46] | YAN C, WANG C, XIANG X J, et al. Collision-avoiding flocking with multiple fixed-wing UAVs in obstacle-cluttered environments: A task-specific curriculum- based MADRL approach[J]. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(8): 10894-10908. |
| [47] | YAN C, WANG C, ZHOU H, et al. Multi-agent reinforcement learning with spatial-temporal attention for flocking with collision avoidance of a scalable fixed-wing UAV fleet[J]. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(2): 1769-1782. |
| [48] | 朱元军, 李妍, 张学军, 等. 基于风险约束的城市空域无人机安全路径规划[J/OL]. 北京航空航天大学学报, (2025-03-27) [2026-01-16]. . |
| ZHU Y J, LI Y, ZHANG X J, et al. Risk-constrained safe path planning for UAVs in urban airspace[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, (2025-03-27) [2026-01-16] (in Chinese). | |
| [49] | SHENG Z M, YANG H A, WANG J K, et al. Improved BFS-based path planning algorithm with finite time generalized suboptimal search incorporating fixed-wing UAV flight constraints for complex low-altitude airspace[J]. Robotics and Autonomous Systems, 2025, 194: 105164. |
| [50] | LIU X, YI W, CHEN P L, et al. Flight path planning of UAV-driven refinement inspection for construction sites based on 3D reconstruction[J]. Automation in Construction, 2025, 177: 106360. |
| [51] | 俞宬, 陈谋, 雍可南. 基于改进RRT*算法的无人机往返航迹规划[J]. 中国科学: 技术科学, 2023, 53(11): 1911-1921. |
| YU C, CHEN M, YONG K N. Round-trip path planning for unmanned aerial vehicle based on improved RRT* algorithm[J]. Scientia Sinica (Technologica), 2023, 53(11): 1911-1921 (in Chinese). | |
| [52] | LINDQVIST B, PATEL A, LÖFGREN K, et al. A tree-based next-best-trajectory method for 3-D UAV exploration[J]. IEEE Transactions on Robotics, 2024, 40: 3496-3513. |
| [53] | REN Y F, ZHU F C, LU G Z, et al. Safety-assured high-speed navigation for MAVs[J]. Science Robotics, 2025, 10(98): eado6187. |
| [54] | ZHANG P W, MEI Y, WANG H, et al. Collision-free trajectory planning for UAVs based on sequential convex programming[J]. Aerospace Science and Technology, 2024, 152: 109404. |
| [55] | 王飞, 杨清平. 基于改进粒子群算法的城市物流无人机路径规划[J]. 科学技术与工程, 2023, 23(30): 13187-13194. |
| WANG F, YANG Q P. Route planning of urban logistics unmanned aerial vehicle based on improved particle swarm optimization algorithm[J]. Science Technology and Engineering, 2023, 23(30): 13187-13194 (in Chinese). | |
| [56] | PHUNG M D, HA Q P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization[J]. Applied Soft Computing, 2021, 107: 107376. |
| [57] | WANG M Y, WANG Q H, WANG Z, et al. Unlocking aerobatic potential of quadcopters: Autonomous freestyle flight generation and execution[J]. Science Robotics, 2025, 10(101): eadp9905. |
| [58] | 周同乐, 陈谋. 基于动态目标概率分布的核电站无人机航路强化学习规划[J]. 中国科学(信息科学), 2022, 52(9): 1642-1655. |
| ZHOU T L, CHEN M. Path reinforcement learning planning of nuclear power plant UAVs based on dynamic target probability distribution[J]. Science in China (Information Sciences), 2022, 52(9): 1642-1655 (in Chinese). | |
| [59] | LIU Z Y, LI L H, ZHANG X, et al. Considering both energy effectiveness and flight safety in UAV trajectory planning for intelligent logistics[J]. Vehicular Communications, 2025, 52: 100885. |
| [60] | 许振阳, 陈谋, 韩增亮, 等. 复杂环境下基于TCP-DQN算法的低空飞行器动态航路规划[J]. 机器人, 2025, 47(3): 383-393. |
| XU Z Y, CHEN M, HAN Z L, et al. Dynamic path planning of low-altitude aircraft based on TCP-DQN algorithm in complex environment[J]. Robot, 2025, 47(3): 383-393 (in Chinese). | |
| [61] | 刘文兵, 王艺栋. 多无人机协同搜索多目标的路径规划问题研究[J]. 电光与控制, 2019, 26(3): 35-38, 73. |
| LIU W B, WANG Y D. Path planning of multi-UAV cooperative search for multiple targets[J]. Electronics Optics Control, 2019, 26(3): 35-38, 73 (in Chinese). | |
| [62] | LIU D Q, FEI B W, BAO W D, et al. DAWN: Dynamic task planning of multi-UAV with two-layer optimization mechanism in uncertain environments[J]. IEEE Internet of Things Journal, 2024, 11(23): 37813-37830. |
| [63] | 陈进朝, 王洋, 张营, 等. 基于时空密度聚类的异构无人机集群覆盖路径规划方法[J]. 电子学报, 2025, 53(3): 705-715. |
| CHEN J C, WANG Y, ZHANG Y, et al. Coverage path planning for heterogeneous UAVs based on temporal-spatial density clustering[J]. Acta Electronica Sinica, 2025, 53(3): 705-715 (in Chinese). | |
| [64] | CHOI S C, LEE Y, CHO S W. Reinforcement learning-integrated evolutionary algorithm for enhanced unmanned aerial vehicle coverage path planning[J]. Swarm and Evolutionary Computation, 2025, 97: 102051. |
| [65] | HONG Y X, WU Q C. Dual-stage collaborative path planning and task allocation for UAV swarms in complex maritime rescue environments[J]. Reliability Engineering and System Safety, 2026, 268(C): 111974 |
| [66] | LI K, YAN X X, HAN Y. Multi-mechanism swarm optimization for multi-UAV task assignment and path planning in transmission line inspection under multi-wind field[J]. Applied Soft Computing, 2024, 150: 111033. |
| [67] | CHUNG H M, MAHARJAN S, ZHANG Y, et al. Placement and routing optimization for automated inspection with unmanned aerial vehicles: A study in offshore wind farm[J]. IEEE Transactions on Industrial Informatics, 2021, 17(5): 3032-3043. |
| [68] | GU W Y, QIN T F, CHEN D, et al. A dual-layer UAV-assisted mobile edge computing system for disaster rescue: Coordinated optimization of coverage, obstacle-avoidance path planning and task offloading[J]. Ad Hoc Networks, 2025, 178: 103981. |
| [69] | 王伟伦, 尤明, 孙磊, 等. 未知环境下无人机集群智能协同探索路径规划[J]. 工程科学学报, 2024, 46(7): 1197-1206. |
| WANG W L, YOU M, SUN L, et al. Intelligent cooperative exploration path planning for UAV swarm in an unknown environment[J]. Chinese Journal of Engineering, 2024, 46(7): 1197-1206 (in Chinese). | |
| [70] | FENG S Y, ZENG L Z, LIU J N, et al. Multi-UAVs collaborative path planning in the cramped environment[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(2): 529-538. |
| [71] | ZHANG X, XIAN B, ZHAO B, et al. Autonomous flight control of a nano quadrotor helicopter in a GPS-denied environment using on-board vision[J]. IEEE Transactions on Industrial Electronics, 2015, 62(10): 6392-6403. |
| [72] | LU Q, REN B B, PARAMESWARAN S, et al. Uncertainty and disturbance estimator-based robust trajectory tracking control for a quadrotor in a global positioning system-denied environment[J]. Journal of Dynamic Systems, Measurement, and Control, 2018, 140(3): 031001. |
| [73] | FU C H, SARABAKHA A, KAYACAN E, et al. Input uncertainty sensitivity enhanced nonsingleton fuzzy logic controllers for long-term navigation of quadrotor UAVs[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(2): 725-734. |
| [74] | XIE H, LOW K H, HE Z. Adaptive visual servoing of unmanned aerial vehicles in GPS-denied environments[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(6): 2554-2563. |
| [75] | MEBARKI R, LIPPIELLO V, SICILIANO B. Nonlinear visual control of unmanned aerial vehicles in GPS-denied environments[J]. IEEE Transactions on Robotics, 2015, 31(4): 1004-1017. |
| [76] | YANG L J, WANG X K, LIU Z H, et al. Robust online predictive visual servoing for autonomous landing of a rotor UAV[J]. IEEE Transactions on Intelligent Vehicles, 2025, 10(4): 2818-2835. |
| [77] | WANG L Q, NING Y, CHEN H M, et al. Autonomous flights inside narrow tunnels[J]. IEEE Transactions on Robotics, 2025, 41: 2230-2250. |
| [78] | CAO Y C. UAV circumnavigating an unknown target under a GPS-denied environment with range-only measurements[J]. Automatica, 2015, 55: 150-158. |
| [79] | DING R Z, BAI S N, DONG K X, et al. Aerodynamic effect for collision-free reactive navigation of a small quadcopter[J]. npj Robotics, 2023, 1: 2. |
| [80] | YAN J R, YU Y G, WANG X K. Hierarchical ADP-ISMC formation control of fixed-wing UAVs in local frames under bounded disturbances[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(11): 6694-6707. |
| [81] | WANG J N, LI K D, XIA K W. Distributed formation control of multi-UAV systems using relative information[J]. Journal of the Franklin Institute, 2024, 361(10): 106945. |
| [82] | CHEN L M, XIAO J P, LIN R C H, et al. Angle-constrained formation maneuvering of unmanned aerial vehicles[J]. IEEE Transactions on Control Systems Technology, 2023, 31(4): 1733-1746. |
| [83] | GUO C P, LIU F, YANG Y L, et al. Multiagent formation control for obstacle traversing using distance-only measurements in GPS-denied environments[J]. IEEE Transactions on Industrial Informatics, 2024, 20(7): 9120-9129. |
| [84] | MA B D, LIU Z B, JIANG F H, et al. Reinforcement learning based UAV formation control in GPS-denied environment[J]. Chinese Journal of Aeronautics, 2023, 36(11): 281-296. |
| [85] | HWANG C L, LI C Y, WU C W. Disturbance-observer-based finite-time following control with wind resistance capability for multiple GPS-denied UAVs[J]. International Journal of Control, Automation and Systems, 2025, 23(10): 3082-3099. |
| [86] | GUO K X, LI X X, XIE L H. Ultra-wideband and odometry-based cooperative relative localization with application to multi-UAV formation control[J]. IEEE Transactions on Cybernetics, 2020, 50(6): 2590-2603. |
| [87] | LIU F, YUAN S H, MENG W, et al. Multiple noncooperative targets encirclement by relative distance-based positioning and neural antisynchronization control[J]. IEEE Transactions on Industrial Electronics, 2024, 71(2): 1675-1685. |
| [88] | YANG S Y, LIN D F, HE S M, et al. Aerial swarm search for GNSS-denied maritime surveillance[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(3): 3442-3453. |
| [89] | HORYNA J, KRÁTKÝ V, PRITZL V, et al. Fast swarming of UAVs in GNSS-denied feature-poor environments without explicit communication[J]. IEEE Robotics and Automation Letters, 2024, 9(6): 5284-5291. |
| [90] | LI W, SHI S, CHEN M, et al. Composite anti-disturbance tracking control for the conversion mode of tilt-rotor aircraft via switched fuzzy modeling[J]. International Journal of Control, Automation and Systems, 2025, 23(3): 960-972. |
| [91] | LIU W, CHEN M, SHI P. Fixed-time disturbance observer-based control for quadcopter suspension transportation system[J]. IEEE Transactions on Circuits and Systems Ⅰ: Regular Papers, 2022, 69(11): 4632-4642. |
| [92] | GUO H Z, CHEN M, SHEN Y H, et al. Distributed event-triggered collision avoidance formation control for QUAVs with disturbances based on virtual tubes[J]. IEEE Transactions on Industrial Electronics, 2025, 72(2): 1892-1903. |
| [93] | CHEN M, CHEN W H. Disturbance-observer-based robust control for time delay uncertain systems[J]. International Journal of Control, Automation and Systems, 2010, 8(2): 445-453. |
| [94] | CHEN M, XIONG S X, WU Q X. Tracking flight control of quadrotor based on disturbance observer[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(3): 1414-1423. |
| [95] | WANG S B, CHEN J, HE X K. An adaptive composite disturbance rejection for attitude control of the agricultural quadrotor UAV[J]. ISA Transactions, 2022, 129(Pt A): 564-579. |
| [96] | SHEN Y H, CHEN M. Event-triggering-learning-based ADP control for post-stall pitching maneuver of aircraft[J]. IEEE Transactions on Cybernetics, 2024, 54(1): 423-434. |
| [97] | HUANG Z G, CHEN M. Coordinated disturbance observer-based flight control of fixed-wing UAV[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2022, 69(8): 3545-3549. |
| [98] | GE S S, WANG C. Adaptive neural control of uncertain MIMO nonlinear systems[J]. IEEE Transactions on Neural Networks, 2004, 15(3): 674-692. |
| [99] | CHEN M, SHAO S Y, JIANG B. Adaptive neural control of uncertain nonlinear systems using disturbance observer[J]. IEEE Transactions on Cybernetics, 2017, 47(10): 3110-3123. |
| [100] | SHAO S Y, CHEN M, HOU J, et al. Event-triggered-based discrete-time neural control for a quadrotor UAV using disturbance observer[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(2): 689-699. |
| [101] | WAN M, CHEN M, YONG K N. Adaptive tracking control for an unmanned autonomous helicopter using neural network and disturbance observer[J]. Neurocomputing, 2022, 468: 296-305. |
| [102] | CHEN M, YAN K, WU Q X. Multiapproximator-based fault-tolerant tracking control for unmanned autonomous helicopter with input saturation[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(9): 5710-5722. |
| [103] | MA H X, CHEN M, FENG G, et al. Disturbance-observer-based adaptive fuzzy tracking control for unmanned autonomous helicopter with flight boundary constraints[J]. IEEE Transactions on Fuzzy Systems, 2023, 31(1): 184-198. |
| [104] | PENG H C, MAO Z H, JIANG B, et al. Bayesian semantic-guided attribute transfer-based dual-driven fault diagnosis for UAVs swarm systems with unseen faults[J]. IEEE Transactions on Industrial Informatics, 2025, 21(9): 6690-6700. |
| [105] | QU R T, JIANG B, CHENG Y H, et al. Information manifold and fault detection of multi-agent systems[J]. Chinese Journal of Aeronautics, 2024, 37(10): 410-423. |
| [106] | ABBASPOUR A, YEN K K, FOROUZANNEZHAD P, et al. A neural adaptive approach for active fault-tolerant control design in UAV[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(9): 3401-3411. |
| [107] | 张柯, 姜斌. 一种改进的自适应故障诊断设计方法及其在飞控系统中的应用[J]. 航空学报, 2009, 30(7): 1271-1276. |
| ZHANG K, JIANG B. Modified adaptive fault diagnosis method and its application to flight control systems[J]. Acta Aeronautica et Astronautica Sinica, 2009, 30(7): 1271-1276 (in Chinese). | |
| [108] | MA H J, LIU Y L, LI T B, et al. Nonlinear high-gain observer-based diagnosis and compensation for actuator and sensor faults in a quadrotor unmanned aerial vehicle[J]. IEEE Transactions on Industrial Informatics, 2019, 15(1): 550-562. |
| [109] | MOOR T. A discussion of fault-tolerant supervisory control in terms of formal languages[J]. Annual Reviews in Control, 2016, 41: 159-169. |
| [110] | KE C X, CAI K Y, QUAN Q. Uniform passive fault-tolerant control of a quadcopter with one, two, or three rotor failure[J]. IEEE Transactions on Robotics, 2023, 39(6): 4297-4311. |
| [111] | KE C X, CAI K Y, QUAN Q. Analysis of a uniform passive fault-tolerant control method for multicopters[J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1574-1582. |
| [112] | 袁荣, 吴陈远, 邵书义, 等. 干扰与传感器故障下固定翼无人机抗饱和控制[J]. 航空学报, 2026, 47(9): 532487. |
| YUAN R, WU C Y, SHAO S Y, et al. Anti-saturation control of fixed-wing UAVs under disturbances and sensor faults[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532487 (in Chinese). | |
| [113] | 邵书义, 陈谋, 招启军. 基于干扰观测器的四旋翼无人机离散时间容错控制[J]. 航空学报, 2020, 41(S2): 724283. |
| SHAO S Y, CHEN M, ZHAO Q J. Discrete-time fault-tolerant control for quadrotor UAV based on disturbance observer[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 724283 (in Chinese). | |
| [114] | CHEN L J, JIANG B. Integrated neural fault-tolerant control using LPV sliding mode observer for quadrotors[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(6): 19098-19111. |
| [115] | WEI L L, CHEN M, LI T. Disturbance-observer-based formation-containment control for UAVs via distributed adaptive event-triggered mechanisms[J]. Journal of the Franklin Institute, 2021, 358(10): 5305-5333. |
| [116] | GUO H Z, CHEN M, JIANG Y H, et al. Distributed adaptive human-in-the-loop event-triggered formation control for QUAVs with quantized communication[J]. IEEE Transactions on Industrial Informatics, 2023, 19(6): 7572-7582. |
| [117] | LIU K, YANG W Y, JIAO L, et al. Fast fixed-time distributed neural formation control-based disturbance observer for multiple quadrotor UAVs under unknown disturbances[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(5): 13137-13155. |
| [118] | WEI L L, CHEN M. Distributed DETMs-based internal collision avoidance control for UAV formation with lumped disturbances[J]. Applied Mathematics and Computation, 2022, 433: 127362. |
| [119] | WEI L L, CHEN M, SHI S. Dynamic event-triggered consensus cost-based switching control for UAV formation with disturbances[J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(2): 3531-3543. |
| [120] | LIU W, CHEN M, ZHANG P. Appointed-time disturbance observer-based control for multiquadrotor suspended transport system within virtual trajectory[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(3): 7320-7336. |
| [121] | WANG Z J, WANG T, LI T, et al. Distributed observer-based close formation control for UAV swarm under outside disturbances and wake interferences[J]. Journal of the Franklin Institute, 2024, 361(5): 106651. |
| [122] | YU Z Q, QU Y H, ZHANG Y M. Safe control of trailing UAV in close formation flight against actuator fault and wake vortex effect[J]. Aerospace Science and Technology, 2018, 77: 189-205. |
| [123] | GONG J Y, MA Y J, JIANG B, et al. An adaptive fault-tolerant control scheme for heterogeneous multiagent systems[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025, 55(2): 1264-1276. |
| [124] | 卢园, 张柯, 姜斌 .基于全驱系统方法的直升机分层容错编队控制[J]. 航空学报, 2026, 47(9): 532279. |
| LU Y, ZHANG K, JIANG B. Hierarchical fault-tolerant formation control for unmanned helicopters based on the fully actuated system approach[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532279 (in Chinese). | |
| [125] | YE Z Y, JIANG B, YU Z Q, et al. Adaptive descriptor sliding-mode observer-based dynamic event-triggered consensus of multiagent systems against actuator and sensor faults[J]. IEEE Transactions on Cybernetics, 2025, 55(2): 672-683. |
| [126] | ZHANG C C, YANG H, JIANG B, et al. Flocking control against malicious agent[J]. IEEE Transactions on Automatic Control, 2024, 69(5): 3278-3285. |
| [127] | GONG J Y, JIANG B, MA Y J, et al. Distributed adaptive fault-tolerant formation-containment control with prescribed performance for heterogeneous multiagent systems[J]. IEEE Transactions on Cybernetics, 2023, 53(12): 7787-7799. |
| [128] | YU Z Q, ZHOU R F, SUN P Y, et al. Hierarchical distributed adaptive fault-tolerant control of nonlinear fractional-order multiagent systems with faults and periodic disturbances using event-triggered communication[J]. IEEE Transactions on Cybernetics, 2024, 54(9): 5231-5243. |
| [129] | ZHANG K, MIAO Q Y, JIANG B. Learning-based fault-tolerant optimal formation control of helicopters: An incremental fully actuated system approach[J]. IEEE Transactions on Cybernetics, 2026, 56(1): 81-93. |
| [130] | 陈谋, 马浩翔, 雍可南, 等. 无人机安全飞行控制综述[J]. 机器人, 2023, 45(3): 345-366. |
| CHEN M, MA H X, YONG K N, et al. Safety flight control of UAV: A survey[J]. Robot, 2023, 45(3): 345-366 (in Chinese). | |
| [131] | 徐现乐, 蒋婉玥, 李东禹. 巡检电路无人机抗饱和位姿控制[J/OL]. 飞控与探测, (2025-12-01) [2026-01-16]. . |
| XU X L, JIANG W Y, LI D Y. Anti-saturation attitude control of inspection UAVs[J/OL]. Flight Control Detection, (2025-12-01) [2026-01-16]. (in Chinese). | |
| [132] | SMITH J, SU J Y, LIU C J, et al. Disturbance observer based control with anti-windup applied to a small fixed wing UAV for disturbance rejection[J]. Journal of Intelligent Robotic Systems, 2017, 88(2): 329-346. |
| [133] | YU Z Q, ZHANG Y M, JIANG B, et al. Nussbaum-based finite time fractional-order backstepping fault-tolerant flight control of fixed-wing UAV against input saturation with hardware-in the-loop validation[J]. Mechanical Systems and Signal Processing, 2021, 153: 107406. |
| [134] | SHEN Z P, LI F, CAO X M, et al. Prescribed performance dynamic surface control for trajectory tracking of quadrotor UAV with uncertainties and input constraints[J]. International Journal of Control, 2021, 94(11): 2945-2955. |
| [135] | KHADHRAOUI A, ZOUAOUI A, SAAD M. Barrier Lyapunov function and adaptive backstepping-based control of a quadrotor UAV[J]. Robotica, 2023, 41(10): 2941-2963. |
| [136] | WANG J, WANG P, MA X. Adaptive event-triggered control for quadrotor aircraft with output constraints[J]. Aerospace Science and Technology, 2020, 105: 105935. |
| [137] | XU Y W, ZHOU R F, YU Z Q, et al. Barrier Lyapunov function-based finite-time reliable trajectory tracking control of fixed-wing UAV with error constraints[J]. IFAC-PapersOnLine, 2022, 55(6): 597-602. |
| [138] | 呼忠权, 华长春, 张柳柳, 等. 预定性能约束下的四旋翼无人机固定时间控制[J]. 控制理论与应用, 2025, 42(6): 1216-1226. |
| HU Z Q, HUA C C, ZHANG L L, et al. Fixed-time control of quadrotor UAVs with prescribed performance constrains[J]. Control Theory Applications, 2025, 42(6): 1216-1226 (in Chinese). | |
| [139] | 武晓晶, 韩欣芮, 吴学礼, 等. 动力学参数未知的四旋翼无人机预定性能控制[J]. 北京航空航天大学学报, 2023, 49(10): 2587-2595. |
| WU X J, HAN X R, WU X L, et al. Prescribed performance control for quadrotor UAV with unknown kinetic parameters[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(10): 2587-2595 (in Chinese). | |
| [140] | NIU W X, SONG Y, LIU J J, et al. Fixed-time prescribed performance fault-tolerant control for quadrotor UAV based on ESO[J]. International Journal of Systems, Control and Communications, 2023, 14(3): 207-235. |
| [141] | 李志南, 李卫华, 王鹏, 等. 输入受限的多旋翼无人机轨迹跟踪鲁棒正定不变集设计[J]. 控制与决策, 2021, 36(4): 857-866. |
| LI Z N, LI W H, WANG P, et al. Design of robust positively invariant set for trajectory tracking of multi-rotor UAV with input saturation[J]. Control and Decision, 2021, 36(4): 857-866 (in Chinese). | |
| [142] | 刘昱鑫, 刘正华, 曹玉波. 基于鲁棒不变集的无人机轨迹跟踪控制研究与应用[J/OL]. 控制工程, (2025-05-28) [2026-01-16]. . |
| LIU Y X, LIU Z H, CAO Y B. Trajectory tracking control of UAVs based on robust invariant sets[J/OL]. Control Engineering, (2025-05-28) [2026-01-16] (in Chinese). | |
| [143] | YONG K N, CHEN M, WU Q X. Constrained adaptive neural control for a class of nonstrict-feedback nonlinear systems with disturbances[J]. Neurocomputing, 2018, 272(C): 405-415. |
| [144] | ZHU B, CHEN M, LI T. Prescribed performance-based tracking control for quadrotor UAV under input delays and input saturations[J]. Transactions of the Institute of Measurement and Control, 2022, 44(10): 2049-2062. |
| [145] | LIU W, CHEN M, YONG K N. Flexible performance constraint-based control of a quadrotor UAV-suspended payload system under input saturation[J]. International Journal of Systems Science, 2024, 55(1): 130-146. |
| [146] | LI W, SHI S, CHEN M, et al. Mixed-auxiliary systems based switching adaptive tracking control for conversion mode of tilt-rotor aircraft[J]. Aerospace Science and Technology, 2026, 168: 110921. |
| [147] | LI A, YIN H T, FU P, et al. Distributed formation control for multiple QUAVs with independent output constraints and actuator amplitude/rate saturation[J]. Aerospace Science and Technology, 2026, 168: 110868. |
| [148] | DUAN H B, YUAN Y, ZENG Z G. Distributed cooperative control of multiple UAVs in the presence of actuator faults and input constraints[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2022, 69(11): 4463-4467. |
| [149] | 郭洪振, 陈谋. 基于预设性能的四旋翼无人机编队安全控制[J]. 航空学报, 2021, 42(8): 525789. |
| GUO H Z, CHEN M. Safety formation control of quadrotor UAVs based on prescribed performance[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 525789 (in Chinese). | |
| [150] | CUI G Z, XU H, YU J P, et al. Event-triggered distributed fixed-time adaptive attitude control with prescribed performance for multiple QUAVs[J]. IEEE Transactions on Automation Science and Engineering, 2024, 21(3): 4471-4481. |
| [151] | CUI G Z, XU H, CHEN X K, et al. Fixed-time distributed adaptive formation control for multiple QUAVs with full-state constraints[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 4192-4206. |
| [152] | 陈谋, 刘伟, 张鹏. 性能约束下的四旋翼无人机协同吊挂系统分布式避碰跟踪控制[J]. 自动化学报, 2024, 50(12): 2392-2406. |
| CHEN M, LIU W, ZHANG P. Distributed collision avoidance tracking control for quadrotor cooperative suspension system under performance constraints[J]. Acta Automatica Sinica, 2024, 50(12): 2392-2406 (in Chinese). | |
| [153] | JIN X, HU Z J. Adaptive cooperative load transportation by a team of quadrotors with multiple constraint requirements[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(1): 801-814. |
| [154] | 付俊杰, 林潇坤, 温广辉. 基于高阶控制障碍函数的多固定翼无人机鲁棒避障安全编队跟踪控制[J]. 机器人, 2025, 47(1): 85-98. |
| FU J J, LIN X K, WEN G H. Robust obstacle avoidance and safe formation tracking control for multiple fixed-wing UAVs based on high-order control barrier functions[J]. Robot, 2025, 47(1): 85-98 (in Chinese). | |
| [155] | 方浩, 赵欣悦, 陈杰. 无人飞行器集群自主控制: 预设性能驱动的安全编队控制[J]. 自动化学报, 2025, 51(5): 931-941. |
| FANG H, ZHAO X Y, CHEN J. Autonomous control of unmanned aerial vehicle swarms: Prescribed performance driven safety formation control[J]. Acta Automatica Sinica, 2025, 51(5): 931-941 (in Chinese). | |
| [156] | XIA K W, PENG J H, WANG W, et al. Distributed robustness-and-safety-critical formation control of autonomous aerial vehicles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(6): 18581-18593. |
| [157] | WANG S F, WANG Y N, MIAO Z Q, et al. Dual model predictive control of multiple quadrotors with formation maintenance and collision avoidance[J]. IEEE Transactions on Industrial Electronics, 2024, 71(12): 16037-16046. |
| [158] | 戴邵武, 赵超轮, 李飞, 等. 一种多约束下无人机编队的模型预测控制算法[J]. 控制与决策, 2023, 38(3): 706-714. |
| DAI S W, ZHAO C L, LI F, et al. An algorithm of model predictive control for formation control of a multiUAV system considering multiple constraints[J]. Control and Decision, 2023, 38(3): 706-714 (in Chinese). |
| [1] | 王晓娟, 田广泰, 李彬, 何振清. 基于动态补偿器的四旋翼无人机全驱抗干扰控制[J]. 航空学报, 2026, 47(9): 123-135. |
| [2] | 张泽君, 王恩美, 陈泽帅, 李晨龙, 章健淳, 余翔. 考虑测量误差的高超声速飞行器抗干扰追逃博弈[J]. 航空学报, 2026, 47(9): 533305-533305. |
| [3] | 袁毓杰, 李嘉帅, 赵昕颐, 王岩韬. 面向动态需求与可变间隔的eVTOL联合调度方法[J]. 航空学报, 2026, 47(1): 631907-631907. |
| [4] | 陈谋, 黄正国, 申耀华, 刘凡. 先进飞行器复合抗干扰控制技术综述[J]. 航空学报, 2025, 46(6): 531303-531303. |
| [5] | 苗永泽, 范兴纲, 李大伟, 孙伟, 黄礼浩, 郝圣桥, 方海洋, 曲荣海, 尤延铖. 电动垂直起降飞行器电驱系统研究进展综述[J]. 航空学报, 2025, 46(22): 332000-332000. |
| [6] | 杨永刚, 姜文韬, 高志云. 低空无人机实时目标检测算法[J]. 航空学报, 2025, 46(16): 331619-331619. |
| [7] | 金永光, 叶方伟, 吴启晖. 面向无人机远程识别的位置隐私保护方法[J]. 航空学报, 2025, 46(11): 531341-531341. |
| [8] | 胡文晓, 牟迪, 李智, 郭盈沂, 陈新民. 低空经济发展的关键技术问题与创新策略[J]. 航空学报, 2025, 46(11): 531539-531539. |
| [9] | 屈若锟, 王致远, 刘晔璐, 李诚龙, 江波. 面向城市空中交通的无人机视觉定位技术[J]. 航空学报, 2025, 46(11): 531168-531168. |
| [10] | 贾永楠. 低空空域无人系统交通管理方案初探[J]. 航空学报, 2025, 46(11): 531399-531399. |
| [11] | 孟凡腾, 秦勇, 崔京, 吴云鹏, 张紫城, 魏少伟. 铁路外部环境无人机图像未知风险检测方法[J]. 航空学报, 2025, 46(11): 531262-531262. |
| [12] | 崔凯鑫, 段广仁. 基于干扰观测器的一类组合航天器高阶全驱抗干扰控制[J]. 航空学报, 2024, 45(1): 628892-628892. |
| [13] | 宋梦实, 张帆, 黄攀峰. 位置约束下软式自主空中加油的抗干扰控制[J]. 航空学报, 2023, 44(20): 629114-629114. |
| [14] | 郭雷, 朱玉凯, 乔建忠, 郭康, 包为民. 无人系统生存智能与安全、免疫、绿色控制技术[J]. 航空学报, 2022, 43(10): 527129-527129. |
| [15] | 郭洪振, 陈谋. 基于预设性能的四旋翼无人机编队安全控制[J]. 航空学报, 2021, 42(8): 525789-525789. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学