岳程斐1,2, 张枭1, 曹喜滨2,3( )
)
收稿日期:2024-09-24
修回日期:2024-11-04
接受日期:2024-12-12
出版日期:2025-07-25
发布日期:2024-12-18
通讯作者:
曹喜滨
E-mail:xbcao@hit.edu.cn
基金资助:
Received:2024-09-24
Revised:2024-11-04
Accepted:2024-12-12
Online:2025-07-25
Published:2024-12-18
摘要:
针对多分支航天器集群装配任务中部分航天器空闲、装配效率低的问题,提出了一种多航天器集群装配任务规划建模与序列分配方法。首先,考虑非严格守序并行装配场景,基于装配约束关系图建立了多航天器装配任务规划模型。其次,提出了装配前序指标和同路惯性指标,对非严格守序装配时子装配体数量和装配过程进行了约束,以避免不同航天器在连续装配任务中装配体之间来回切换的问题。最后,基于深度优先搜索策略改进了拓扑排序算法,解决了非严格守序并行装配中的序列分配规划问题;采用遗传算法对装配序列进行优化,在提高装配效率的同时有效降低了零散子装配体数量和连续任务切换次数;采用Gumbel-Sinkhorn网络为装配任务序列分配解集,实现了单一装配序列到可行装配解集的映射。最后通过典型在轨装配任务仿真,验证了任务规划模型与序列分配方法的有效性。
中图分类号:
岳程斐, 张枭, 曹喜滨. 多航天器非严格守序并行装配任务规划方法[J]. 航空学报, 2025, 46(14): 331258.
表 1
多航天器任务序列分配规划类型
| 文献 | 模型类型 | 同步性 | 协同性 | 守序性 |
|---|---|---|---|---|
| [ | 无向树状图 | 同步 | 不协同 | 守序 |
| [ | 有向无环图 | 同步 | 不协同 | 守序 |
| [ | 有向无环图 | 异步 | 不协同 | 守序 |
| [ | 有向无环图 | 同步 | 协同 | 守序 |
| 本文 | 有向无环图 | 同步 | 不协同 | 非严格守序 |
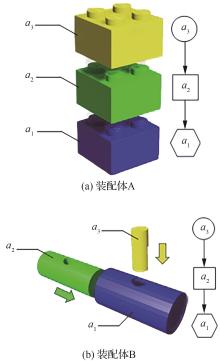
图 1
相同拆解序列的2组装配体
图 2
装配序列分配矩阵T1
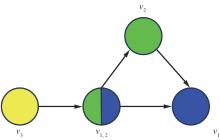
图 3
含虚拟节点的装配约束图
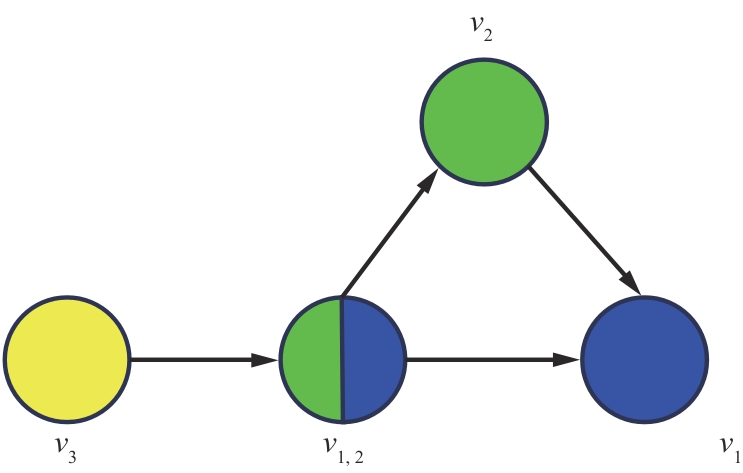
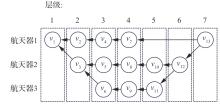
图 4
基于守序约束的装配深度图
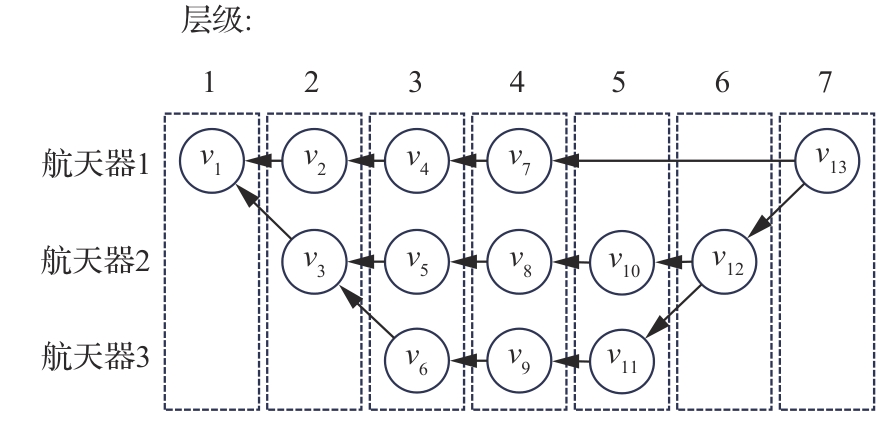
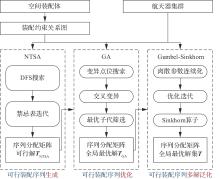
图 5
多航天器并行装配规划算法流程图
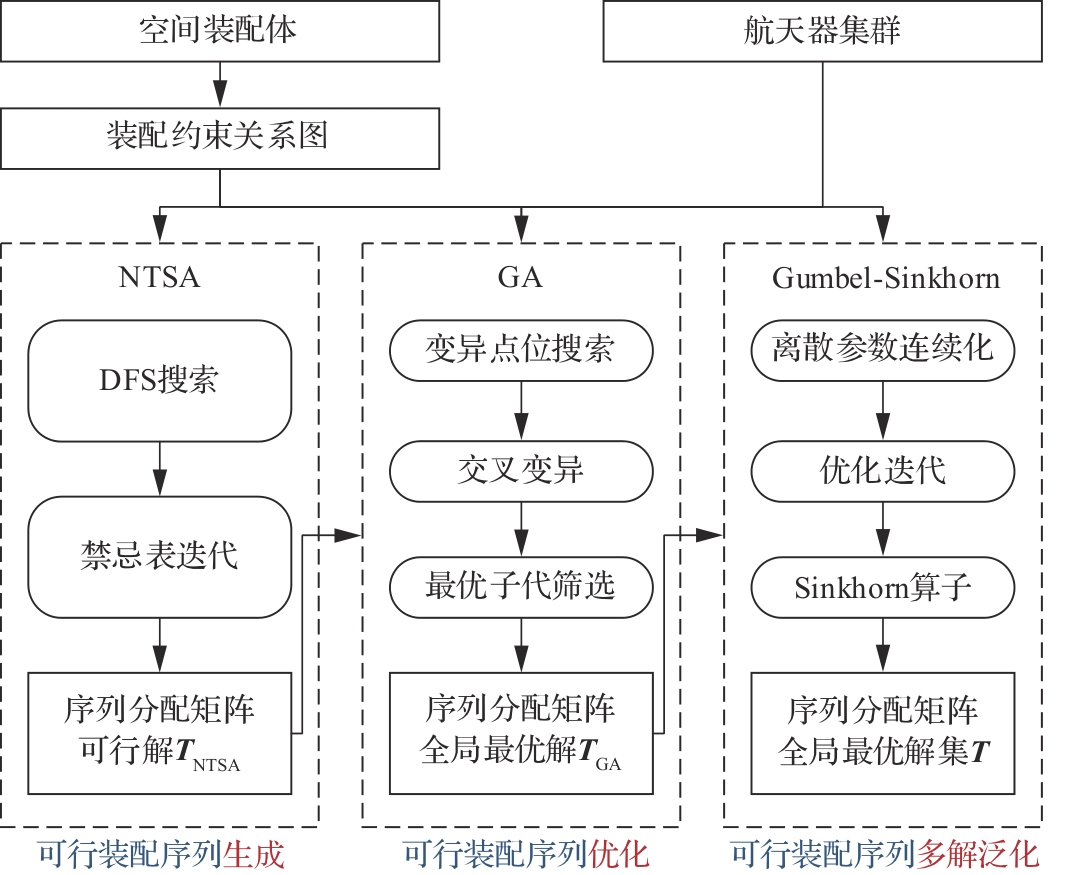

图 6
DFS拓扑排序算法原理
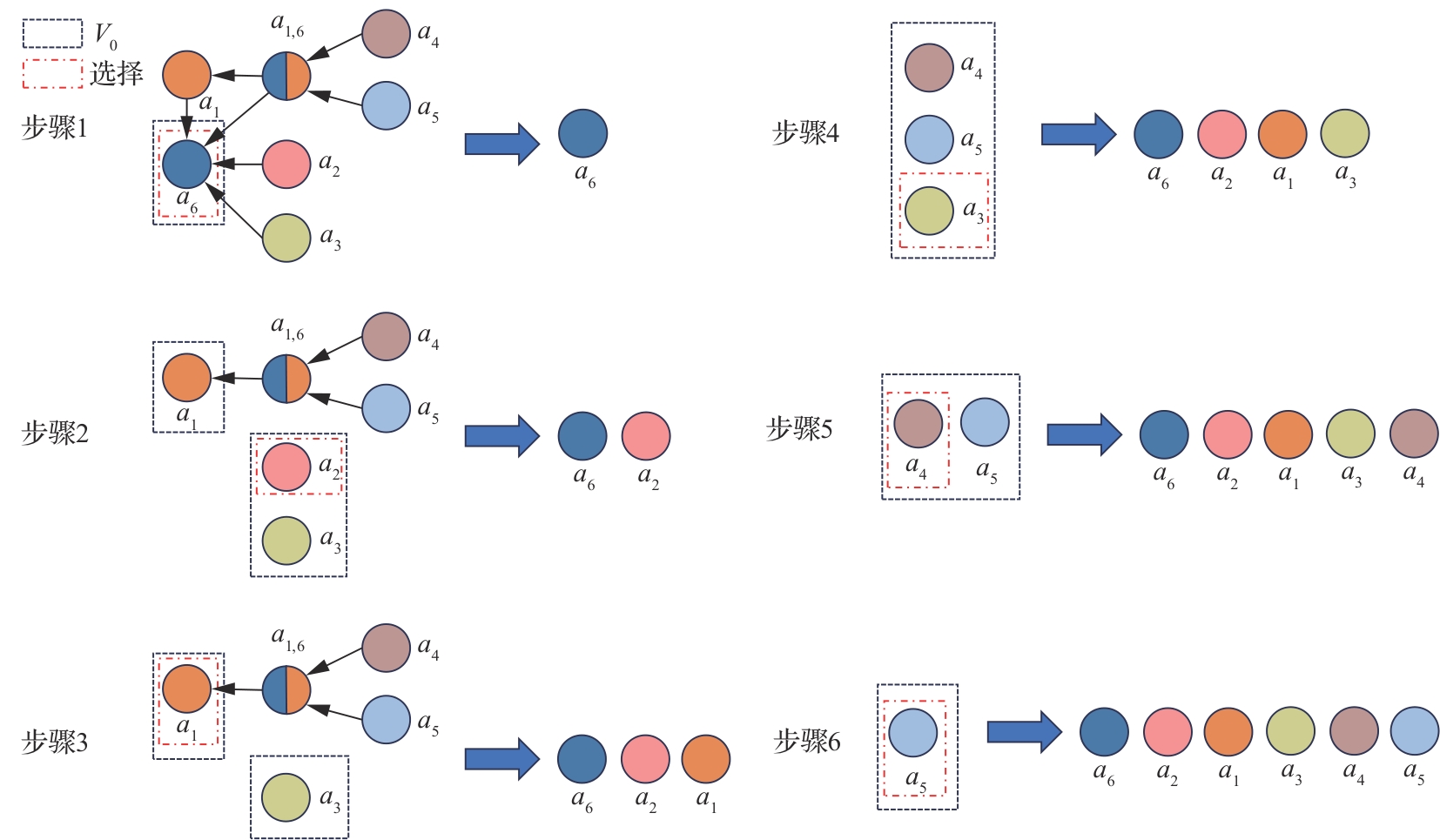

图 7
非严格守序约束的变异操作
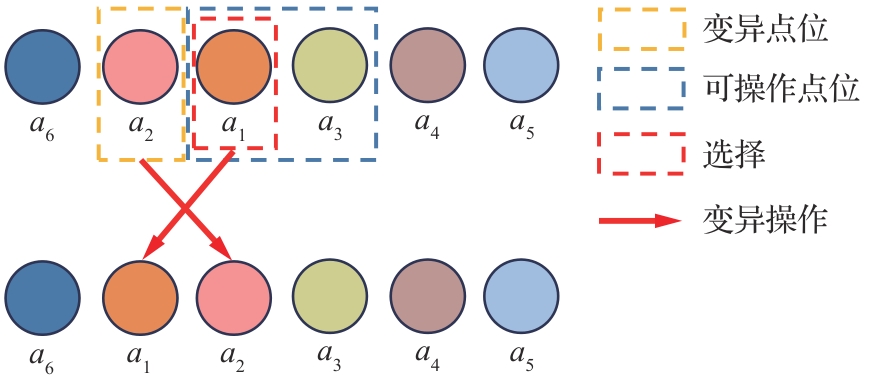
表 2
算例设置与算法参数
| 算法参数 | 数值 |
|---|---|
| 指标系数 | 2.079 |
| 指标系数 | 833 |
| 遗传算法种群 | 50 |
| 变异率 | 0.3/10 |
| 最优子代数 | 5 |
| 最大代数 | 50 |
| 0.05 | |
| 20/0.001 |

图 8
算例模型参数V,E,rT∞及装配关系图示例
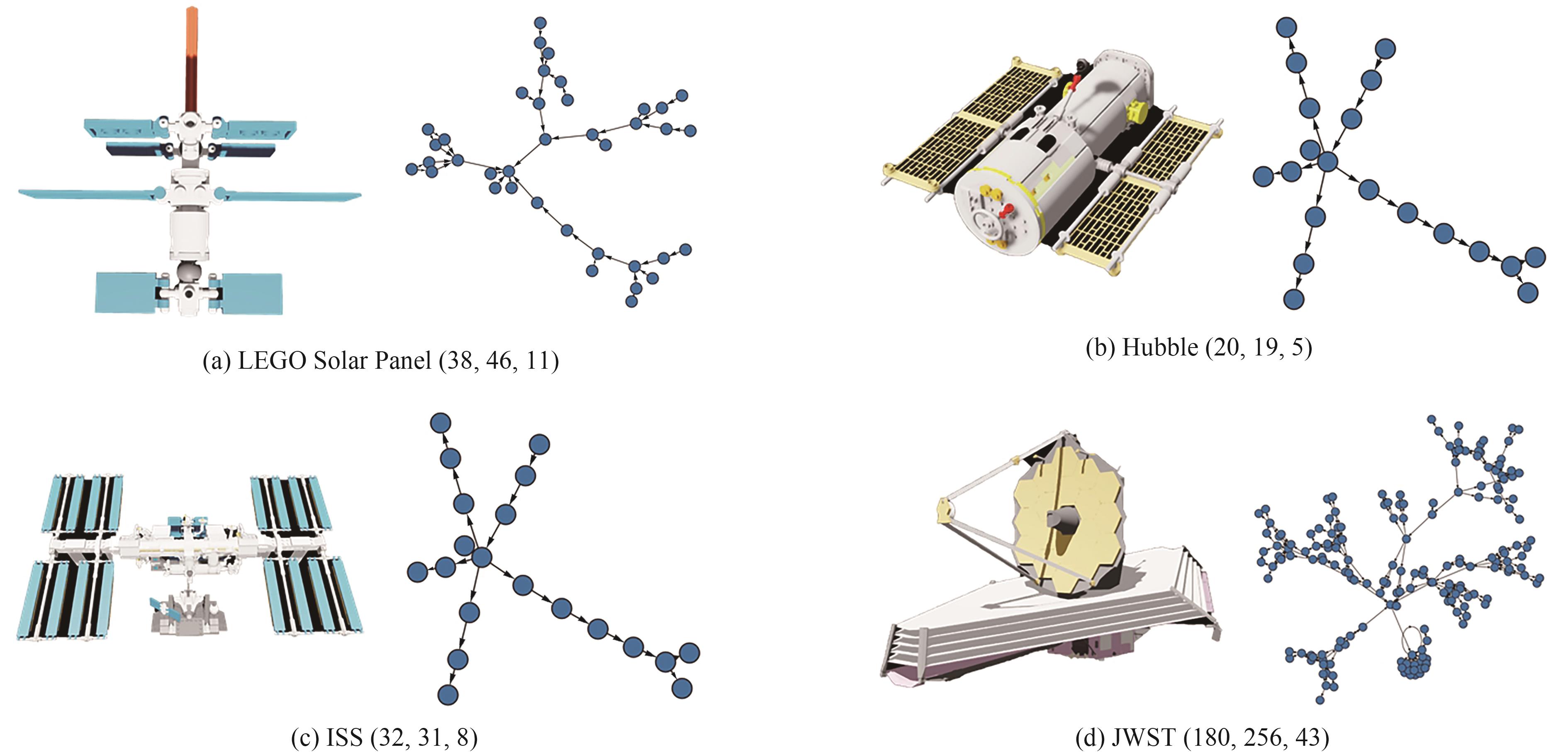
表 3
仿真结果
| 参数 | 算法 | 装配序列分配矩阵 | 利用率 | 指标 |
|---|---|---|---|---|
| DFS | 0.792 | |||
| NTSA | 0.974 | 169.975 | ||
| DFS | 0.487 | |||
| NTSA | 0.792 | 77.469 | ||
| DFS | 0.352 | |||
| NTSA | 0.704 | 72.520 |
图 9
守序与非严格守序约束下的任务阶段数
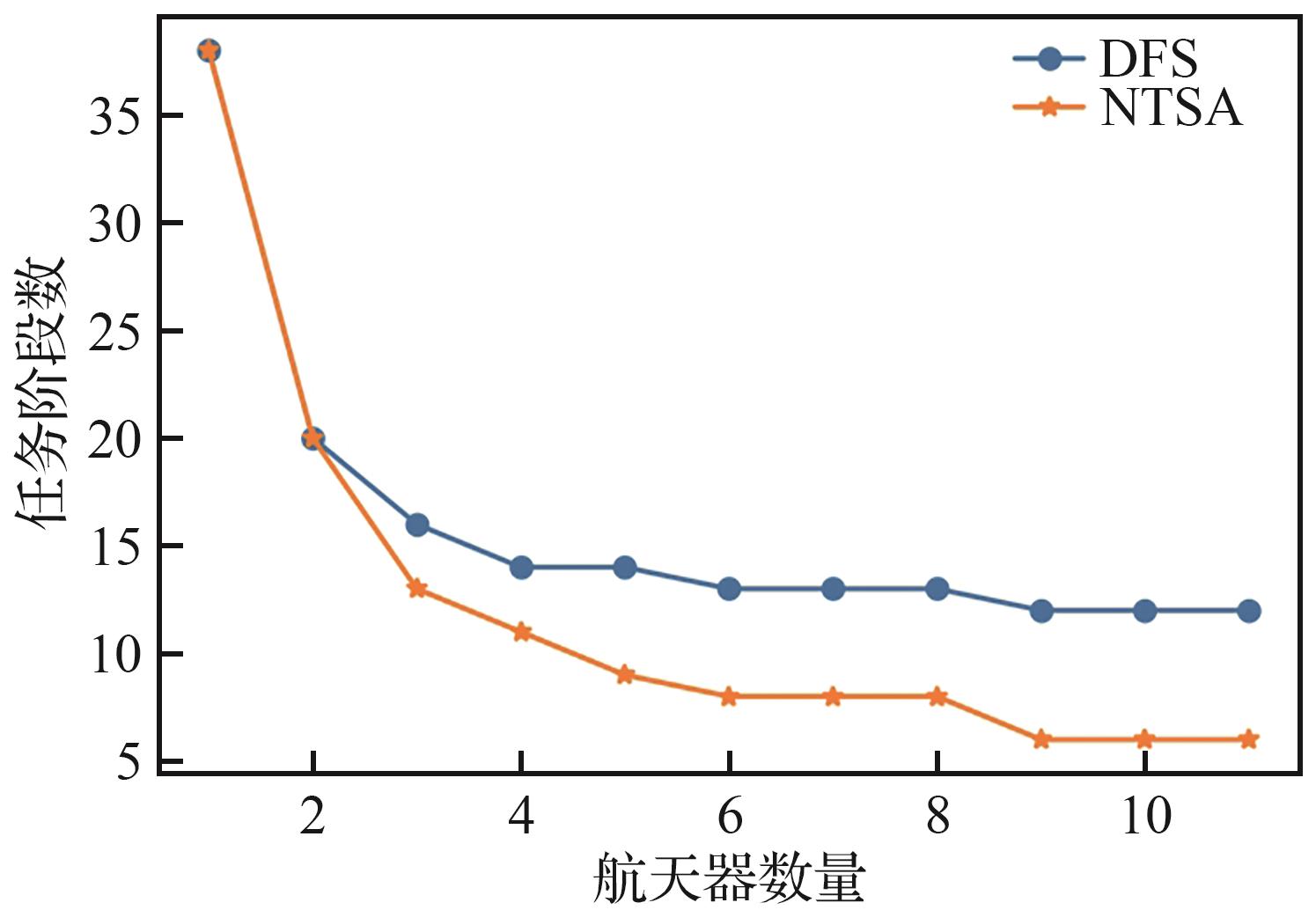
图 10
守序与非严格守序约束下的航天器利用率
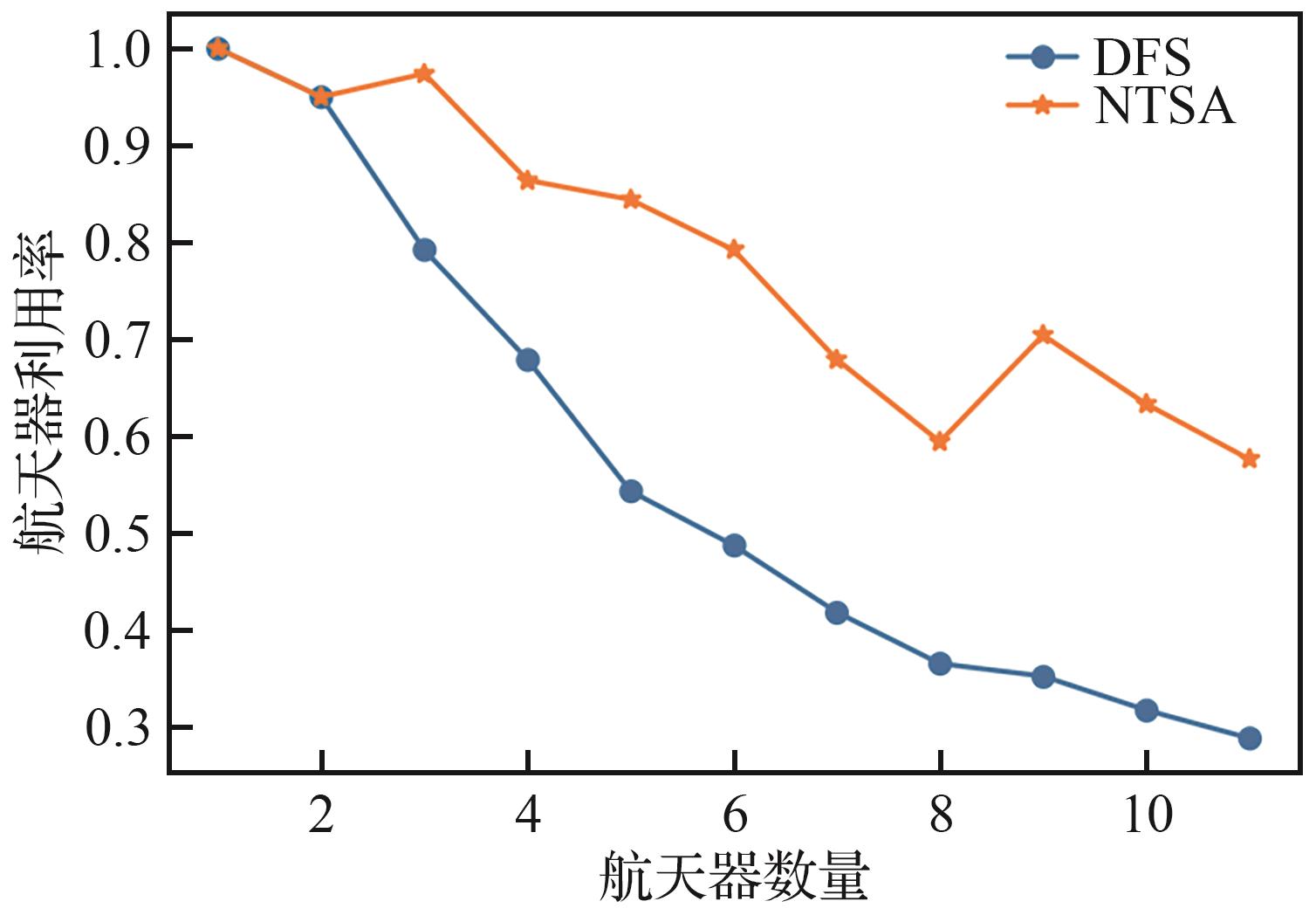

图 11
LEGO Solar Panel模型爆炸图
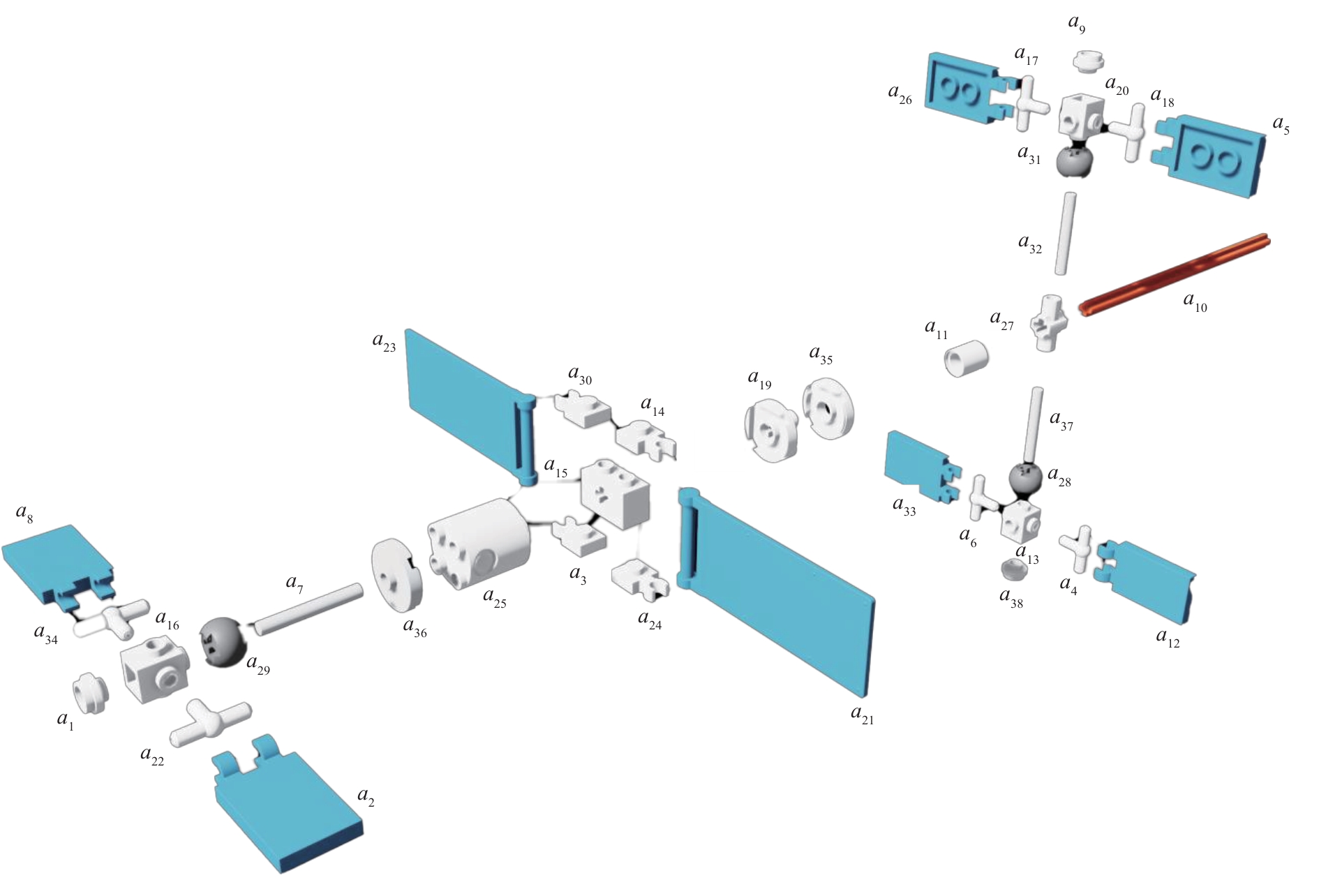

图 12
DFS算法装配序列各任务阶段的装配状态
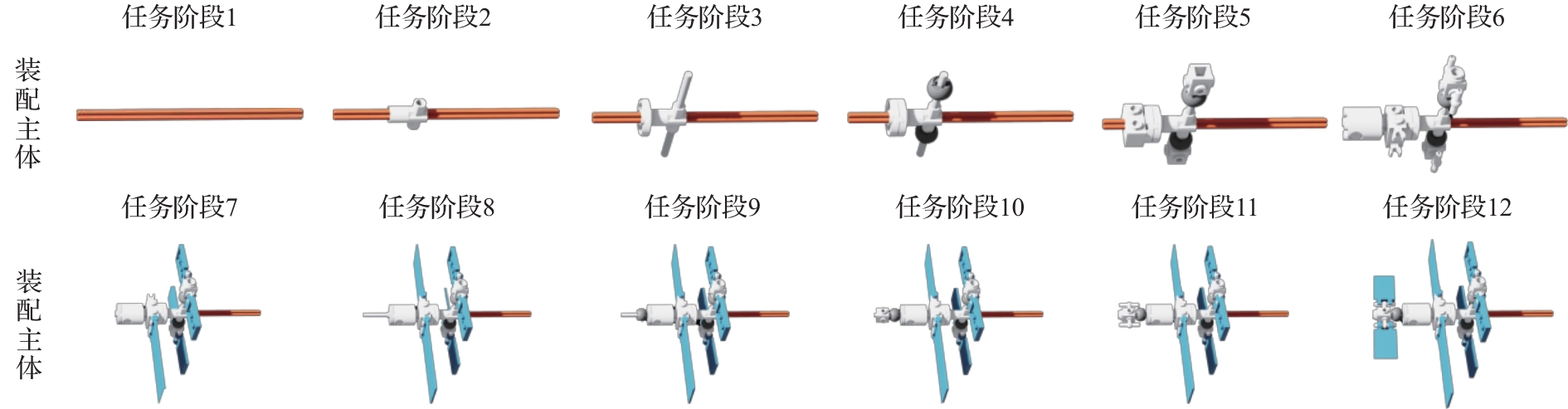

图 13
NTSA算法装配序列各任务阶段的装配状态
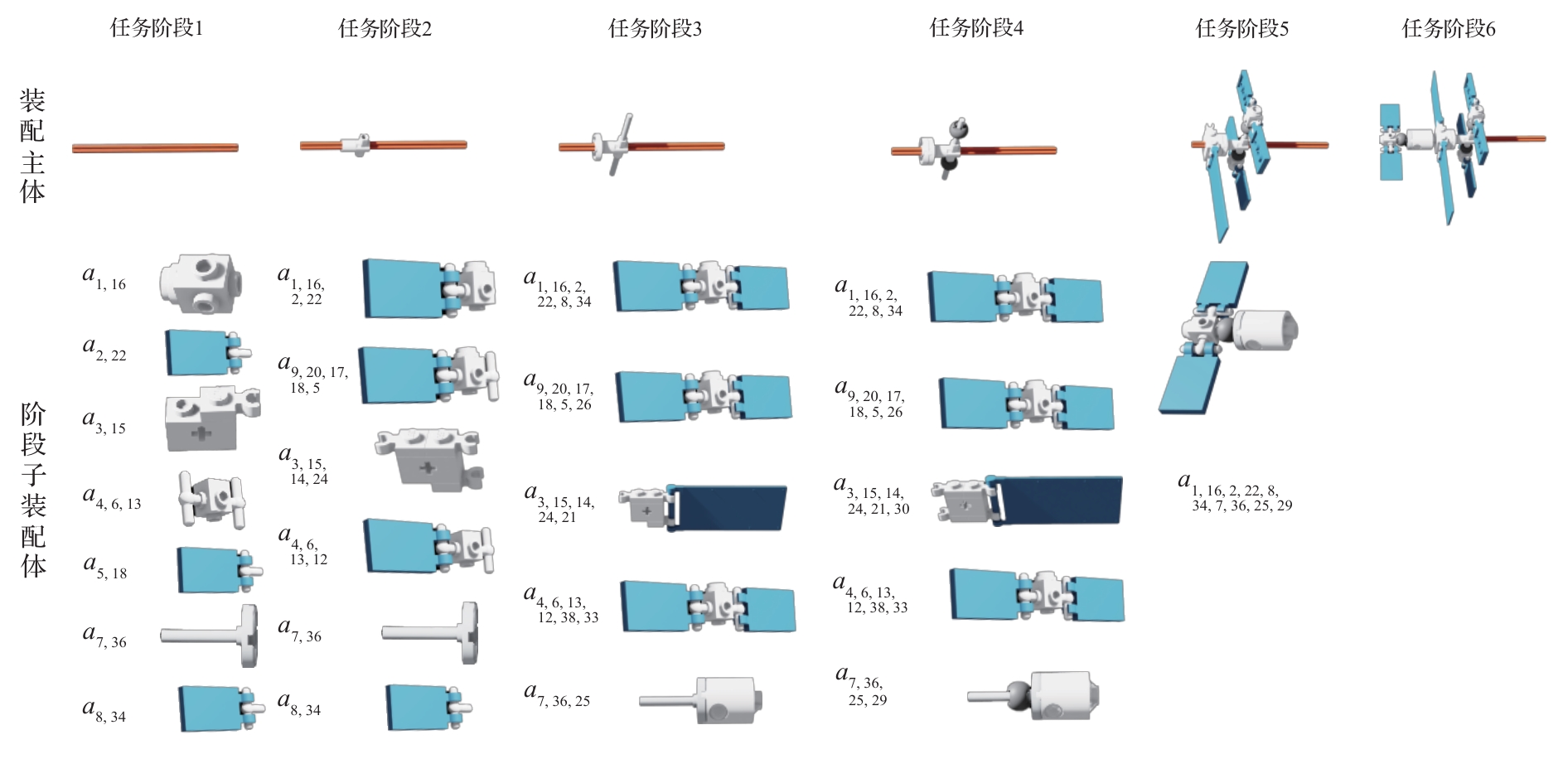
表 4
4组算例仿真对比结果
| 算例 | 算法 | 航天器个数 | 指标 | ||
|---|---|---|---|---|---|
| 迭代次数5 | 迭代次数20 | 迭代次数50 | |||
LEGO Solar Panel | GA | 3 | 142.177 | 125.430 | 69.692 |
| 4 | 99.924 | 91.616 | 89.450 | ||
| 5 | 74.292 | 61.848 | 49.096 | ||
| 6 | 60.153 | 53.919 | 49.791 | ||
| 7 | 53.206 | 47.513 | 42.578 | ||
| 8 | 50.105 | 43.227 | 37.822 | ||
| 9 | 39.553 | 36.637 | 36.298 | ||
Gumbel Sinkhorn | 3 | 70.497 | 58.560 | 54.043 | |
| 4 | 90.689 | 79.182 | 71.489 | ||
| 5 | 51.329 | 46.309 | 44.076 | ||
| 6 | 51.037 | 45.655 | 41.718 | ||
| 7 | 43.659 | 37.060 | 35.592 | ||
| 8 | 39.803 | 35.975 | 32.220 | ||
| 9 | 37.272 | 34.293 | 31.313 | ||
| Hubble | GA | 3 | 144.417 | 84.779 | 81.893 |
| 4 | 89.426 | 75.263 | 74.791 | ||
| 5 | 81.106 | 58.249 | 53.953 | ||
| 6 | 60.346 | 47.011 | 44.846 | ||
| 7 | 141.832 | 141.832 | 141.832 | ||
| 8 | 515.975 | 515.975 | 515.975 | ||
| 9 | 108.306 | 108.306 | 108.306 | ||
Gumbel Sinkhorn | 3 | 85.077 | 78.502 | 73.494 | |
| 4 | 79.409 | 75.504 | 68.209 | ||
| 5 | 57.273 | 55.299 | 52.938 | ||
| 6 | 45.409 | 40.578 | 40.358 | ||
| 7 | 197.637 | 99.457 | 70.963 | ||
| 8 | 268.481 | 114.867 | 86.424 | ||
| 9 | 162.467 | 59.145 | 43.749 | ||
| ISS | GA | 3 | 90.416 | 78.799 | 74.222 |
| 4 | 62.060 | 51.864 | 49.623 | ||
| 5 | 73.523 | 44.139 | 39.235 | ||
| 6 | 63.257 | 49.458 | 46.617 | ||
| 7 | 62.032 | 45.258 | 40.286 | ||
| 8 | 58.050 | 41.489 | 30.785 | ||
| 9 | 60.675 | 44.350 | 41.383 | ||
Gumbel Sinkhorn | 3 | 74.848 | 64.156 | 56.426 | |
| 4 | 50.672 | 44.031 | 39.791 | ||
| 5 | 39.509 | 35.940 | 32.214 | ||
| 6 | 47.299 | 45.117 | 43.479 | ||
| 7 | 40.866 | 37.493 | 36.665 | ||
| 8 | 31.430 | 29.044 | 26.994 | ||
| 9 | 42.078 | 40.187 | 37.563 | ||
| JWST | GA | 3 | 458.602 | 401.159 | 332.308 |
| 4 | 271.470 | 247.406 | 217.591 | ||
| 5 | 177.915 | 158.932 | 136.608 | ||
| 6 | 121.724 | 112.556 | 94.751 | ||
| 7 | 90.387 | 82.36 | 71.968 | ||
| 8 | 71.145 | 65.735 | 56.310 | ||
| 9 | 56.547 | 52.204 | 47.619 | ||
Gumbel Sinkhorn | 3 | 653.481 | 332.534 | 332.308 | |
| 4 | 256.135 | 217.602 | 217.591 | ||
| 5 | 188.689 | 136.620 | 136.608 | ||
| 6 | 195.563 | 94.799 | 94.751 | ||
| 7 | 133.826 | 71.980 | 71.968 | ||
| 8 | 69.349 | 56.928 | 56.928 | ||
| 9 | 51.779 | 47.618 | 47.618 | ||

图 14
Gumbel-Sinkhorn求解过程
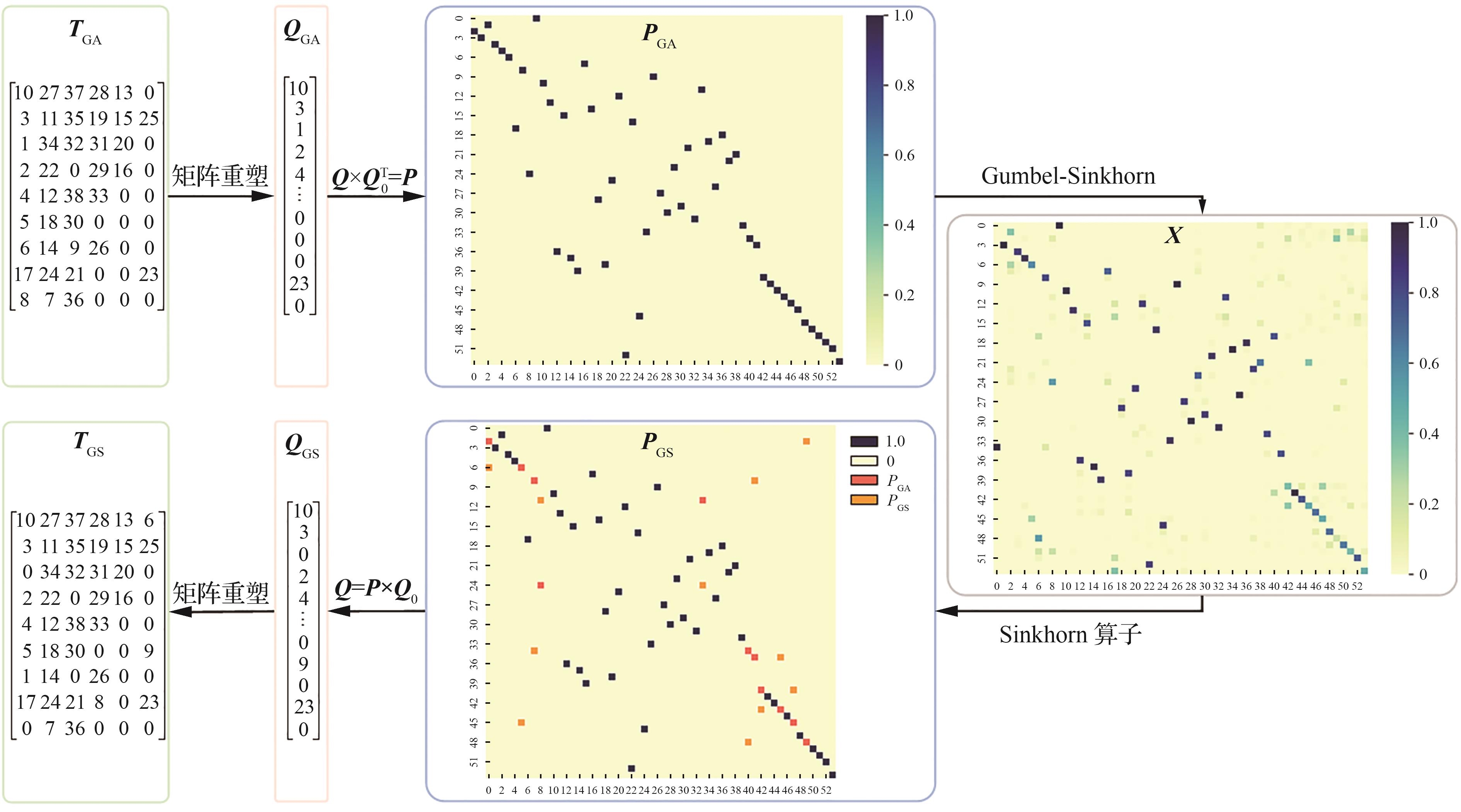

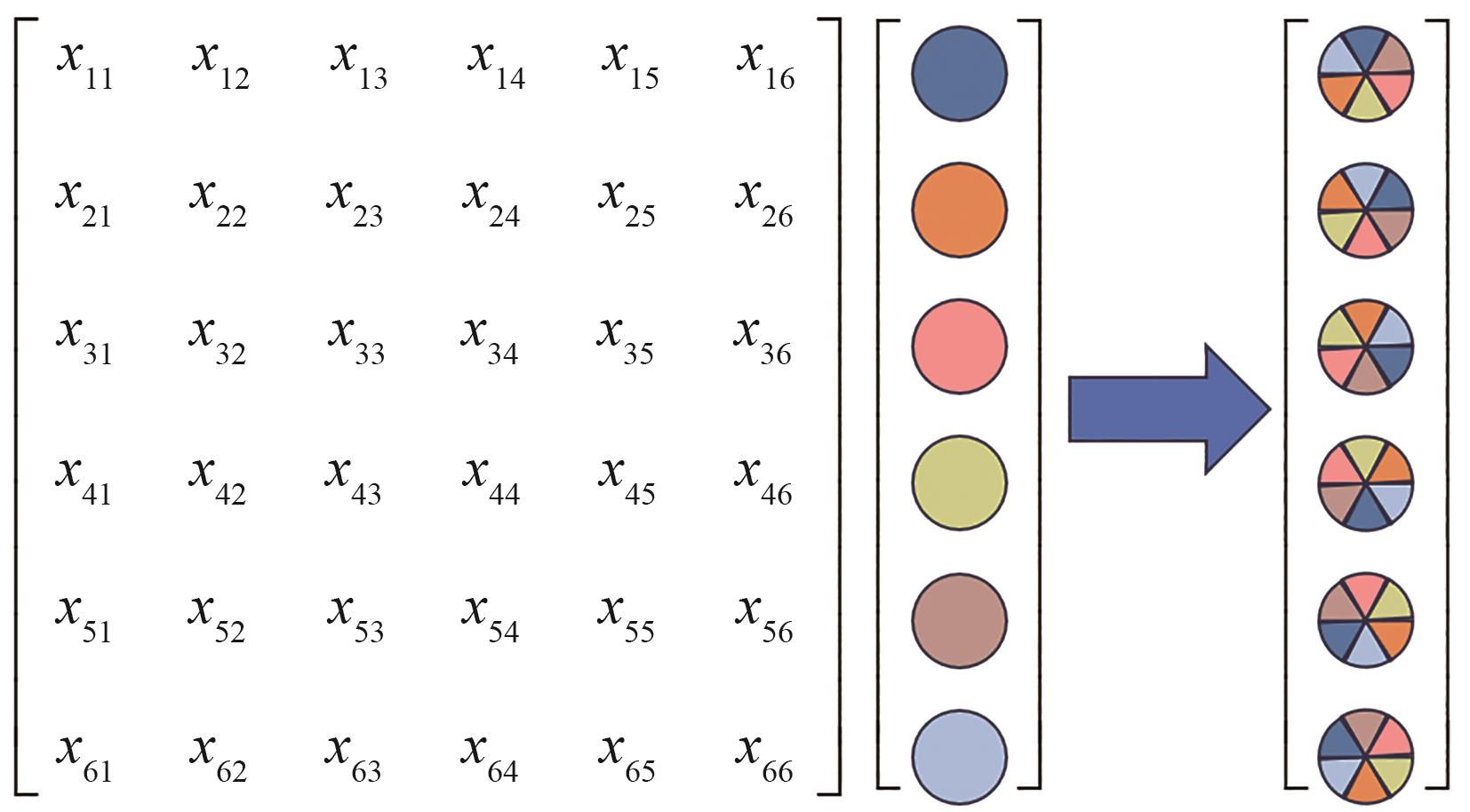
图 A1
X对序列的重参数化
| [1] | 王明明, 罗建军, 袁建平, 等. 空间在轨装配技术综述[J]. 航空学报, 2021, 42(1): 523913. |
| WANG M M, LUO J J, YUAN J P, et al. In-orbit assembly technology: Review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 523913 (in Chinese). | |
| [2] | 岳程斐, 陆浪, 吴云华, 等. 在轨集群操控关键技术研究进展与展望[J]. 宇航学报, 2023, 44(6): 817-828. |
| YUE C F, LU L, WU Y H, et al. Research progress and prospect of the key technologies for on-orbit spacecraft swarm manipulation[J]. Journal of Astronautics, 2023, 44(6): 817-828 (in Chinese). | |
| [3] | 刘宏, 刘冬雨, 蒋再男. 空间机械臂技术综述及展望[J]. 航空学报, 2021, 42(1): 524164. |
| LIU H, LIU D Y, JIANG Z N. Space manipulator technology: review and prospect[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 524164 (in Chinese). | |
| [4] | LU L, YUE C F, SHEN Q, et al. Hierarchical passivity-based force-position-configuration coordinated control of multi-branch spacecraft[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024(99): 1-16. |
| [5] | 孟光, 韩亮亮, 张崇峰. 空间机器人研究进展及技术挑战[J]. 航空学报, 2021, 42(1): 523963. |
| MENG G, HAN L L, ZHANG C F. Research progress and technical challenges of space robot[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 523963 (in Chinese). | |
| [6] | YUE C F, LIN T, ZHANG X, et al. Hierarchical path planning for multi-arm spacecraft with general translational and rotational locomotion mode[J]. Science China Technological Sciences, 2023, 66(4): 1180-1191. |
| [7] | LIU J G, ZHAO P Y, CHEN K L, et al. 1U-Sized deployable space manipulator for future on-orbit servicing, assembly, and manufacturing[J]. Space: Science & Technology, 2022, 2022: 9894604. |
| [8] | 牟帅, 卜慧蛟, 张进, 等. 面向突发任务的空间站任务重规划方法[J]. 航空学报, 2017, 38(7): 320793. |
| MU S, BU H J, ZHANG J, et al. Re-planning method for space station pop-up missions[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(7): 320793 (in Chinese). | |
| [9] | BROWN K J. Algorithms for multi-agent robotic assembly planning[D]. Stanford: Stanford University, 2021: 8-10. |
| [10] | BROWN K, ASMAR D M, SCHWAGER M, et al. Large-scale multi-robot assembly planning for autonomous manufacturing[DB/OL].arXiv preprint: 2311.00192; 2023. |
| [11] | CULBERTSON P D. Planning and control for multi-robot manipulation and assembly in unstructured environments[D]. Stanford: Stanford University, 2022: 57-73. |
| [12] | CULBERTSON P, BANDYOPADHYAY S, SCHWAGER M. Multi-robot assembly sequencing via discrete optimization[C]∥2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2019: 6502-6509. |
| [13] | CULBERTSON P, BANDYOPADHYAY S, GOEL A, et al. Multi-robot assembly scheduling for the lunar crater radio telescope on the far-side of the moon[C]∥ 2022 IEEE Aerospace Conference (AERO). Piscataway: IEEE Press, 2022: 1-9. |
| [14] | NAGPAL K, MEHR N. Optimal robotic assembly sequence planning: A sequential decision-making approach[DB/OL]. arXiv preprint: 2310.17115, 2023. |
| [15] | ZHANG C, CAO Z G, WU Y X, et al. Learning topological representations with bidirectional graph attention network for solving job shop scheduling problem[DB/OL]. arXiv preprint: 2402.17606, 2024. |
| [16] | WANG N, YANG X, WANG T H, et al. Collaborative path planning and task allocation for multiple agricultural machines[J]. Computers and Electronics in Agriculture, 2023, 213: 108218. |
| [17] | EVANS J D, KESSLER R. Allocation of parallel pro-grams with time variant resource requirements[C]∥ 1993 International Conference on Parallel Processing (ICPP’93). Piscataway: IEEE Press, 1993: 271-275. |
| [18] | QIAN T, LIU X F, FANG Y C. A cooperative ant colony system for multiobjective multirobot task allocation with precedence constraints[J]. IEEE Transactions on Evolutionary Computation, 2024(99): 1. |
| [19] | LIN T, YUE C F, LIU Z R, et al. Modular multi-level replanning TAMP framework for dynamic environment[J]. IEEE Robotics and Automation Letters, 2024, 9(5): 4234-4241. |
| [20] | 邹子缘, 陈琪锋. 基于决策树搜索的空间飞行器集群对抗目标分配方法[J]. 航空学报, 2022, 43(S1): 726910. |
| ZOU Z Y, CHEN Q F. Decision tree-based target assignment for confrontation of multiple space vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(S1): 726910 (in Chinese). | |
| [21] | 王路桥, 王璐, 庄慧盈, 等. 约束分级的飞行器任务指令序列编排方法[J]. 航空学报, 2024, 45(20): 630445. |
| WANG L Q, WANG L, ZHUANG H Y, et al. A hierarchical constraint-based method for arranging aircraft mission instruction sequences[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 630445 (in Chinese). | |
| [22] | LIU Z S, GUO M, BAO W M, et al. Fast and adaptive multi-agent planning under collaborative temporal logic tasks via poset products[J]. Research, 2024, 7: 337. |
| [23] | LIU Z S, GUO M, LI Z K. Time minimization and online synchronization for multi-agent systems under collaborative temporal logic tasks[J]. Automatica, 2024, 159: 111377. |
| [24] | BAI X S, FIELBAUM A, KRONMÜLLER M, et al. Group-based distributed auction algorithms for multi-robot task assignment[J]. IEEE Transactions on Automation Science and Engineering, 2023, 20(2): 1292-1303. |
| [25] | BAI X S, LI C, ZHANG B, et al. Efficient performance impact algorithms for multirobot task assignment with deadlines[J]. IEEE Transactions on Industrial Electronics, 2024, 71(11): 14373-14382. |
| [26] | LIU Y, HAN D, WANG L, et al. Novel topological relationship solutions to the alv multi-indegree-multi-outdegree task sequence planning problem[J]. International Journal of Robotics and Automation, 2022, 37(3): 257-265. |
| [27] | LIU Y D, HAN D, WANG L J, et al. HGHA: task allocation and path planning for warehouse agents[J]. Assembly Automation, 2021, 41(2): 165-173. |
| [28] | MENA G, BELANGER D, LINDERMAN S, et al. Learning latent permutations with gumbel-sinkhorn networks[DB/OL]. arXiv preprint: 1802.08665, 2018. |
| [1] | 谭天乐 史树峰. 途经点约束下模型预测与反演制导的遗传算法寻优(航天器智能控制专栏)[J]. 航空学报, 0, (): 1-0. |
| [2] | 赵浩天, 邱实, 刘明, 盖琦超, 曹喜滨. 基于全生命周期数据驱动的通讯卫星行波管退化评估方法[J]. 航空学报, 2025, 46(12): 331376-331376. |
| [3] | 谢启超 曹承钰 赵逸云 李繁飙. 基于深度强化学习调参的制导控制一体化方法(空天前沿大会增刊)[J]. 航空学报, 0, (): 1-0. |
| [4] | 张建福, 李连升, 陈建新, 常晔, 尹路, 韩星. “祝融号”火星车太阳敏感器设计与验证[J]. 航空学报, 2025, 46(7): 330882-330882. |
| [5] | 王义宇 张泽旭 包为民 袁帅 崔祜涛. 抵近中躲避非合作目标视场的航天器轨迹规划[J]. 航空学报, 0, (): 1-0. |
| [6] | 王曦, 陈长青, 徐小平, 黄震. 头尾交替对日连续偏航姿态控制策略[J]. 航空学报, 2025, 46(1): 330673-330673. |
| [7] | 南子寒, 刘大禹, 董明, 梁文宁, 赵雪薇, 马伊琳, 关瑶. GNSS拒止下多源自主导航鲁棒滤波方法[J]. 航空学报, 2024, 45(S1): 730782-730782. |
| [8] | 王路桥, 王璐, 庄慧盈, 吴磊, 李青山, 田恒宇. 约束分级的飞行器任务指令序列编排方法[J]. 航空学报, 2024, 45(20): 630445-630445. |
| [9] | 高兵, 张哲婕, 邹启杰, 刘治国, 赵锡玲. 基于深度强化学习和信息论的多智能体通信方法[J]. 航空学报, 2024, 45(18): 329862-329862. |
| [10] | 陈雪芹, 杨伯毓, 吴凡, 岳程斐, 曹喜滨. 基于l1-TSXKF的航天器姿控系统状态偏差估计[J]. 航空学报, 2024, 45(16): 329678-329678. |
| [11] | 白显宗, 黎克波, 李昊键, 董伟. 基于固定时间收敛误差动力学的微分几何制导律设计[J]. 航空学报, 2024, 45(16): 329712-329712. |
| [12] | 陈炳龙, 王磊, 刘帮, 周衡. 载荷数据和对日导引律修正星敏安装矩阵算法[J]. 航空学报, 2024, 45(13): 329502-329502. |
| [13] | 张得阳, 郑然, 程会艳, 孟小迪, 齐静雅, 李林, 林大泳. 一种提升空间暗弱目标探测灵敏度的方法[J]. 航空学报, 2025, 46(3): 629944-629944. |
| [14] | 宁铠, 吴宝林. 基于事件驱动的航天器星下点轨迹维持控制[J]. 航空学报, 2024, 45(10): 329412-329412. |
| [15] | 张依宁, 温昶煊, 庞博, 朱天昊, 何嘉欣, 金紫涵. 基于高精度回归共振的掩星观测轨道设计[J]. 航空学报, 2024, 45(8): 329151-329151. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学