| [1] |
丁文俊, 柴亚军, 侯冬冬, 等. AUV&UAV跨域协同搜索与跟踪路径规划[J]. 航空学报, 2023, 44(21): 528471.
|
|
DING W J, CHAI Y J, HOU D D, et al. Path planning for AUV & UAV cross-domain collaborative search and tracking[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(21): 528471 (in Chinese).
|
| [2] |
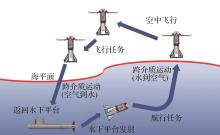
杨兴帮, 梁建宏, 文力, 等. 水空两栖跨介质无人飞行器研究现状[J]. 机器人, 2018, 40(1): 102-114.
|
|
YANG X B, LIANG J H, WEN L, et al. Research status of water-air amphibious trans-media unmannedvehicle[J]. Robot, 2018, 40(1): 102-114 (in Chinese).
|
| [3] |
DREWS P L J, NETO A A, CAMPOS M F M. Hybrid unmanned aerial underwater vehicle: Modeling and simulation[C]∥2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2014: 4637-4642.
|
| [4] |
ALZU’BI H, AKINSANYA O, KAJA N, et al. Evaluation of an aerial quadcopter power-plant for underwater operation[C]∥2015 10th International Symposium on Mechatronics and its Applications (ISMA). Piscataway: IEEE Press, 2015.
|
| [5] |
BERSHADSKY D, HAVILAND S, VALDEZ P E, et al. Design considerations of submersible unmanned flying vehicle for communications and underwater sampling [C]∥OCEANS 2016 MTS/IEEE Monterey. Piscataway: IEEE Press, 2016.
|
| [6] |
MA Z C, FENG J F, YANG J. Research on vertical air-water trans-media control of hybrid unmanned aerial underwater vehicles based on adaptive sliding mode dynamical surface control[J]. International Journal of Advanced Robotic Systems, 2018, 15(2): 1729881418770531.
|
| [7] |
LU D, XIONG C K, LYU B Z, et al. Multi-mode hybrid aerial underwater vehicle with extended endurance[C]∥2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO). Piscataway: IEEE Press, 2018.
|
| [8] |
LU D, XIONG C K, ZENG Z, et al. A multimodal aerial underwater vehicle with extended endurance and capabilities[C]∥2019 International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2019: 4674-4680.
|
| [9] |
LU D, XIONG C K, ZHOU H X, et al. Design, fabrication, and characterization of a multimodal hybrid aerial underwater vehicle[J]. Ocean Engineering, 2021, 219: 108324.
|
| [10] |
LYU C X, LU D, XIONG C K, et al. Toward a gliding hybrid aerial underwater vehicle: Design, fabrication, and experiments[J]. Journal of Field Robotics, 2022, 39(5): 543-556.
|
| [11] |
张硕, 张树新, 代季鹏. 小型跨介质无人机快速水空过渡设计与试验[J]. 飞行力学, 2021, 39(5): 77-81, 94.
|
|
ZHANG S, ZHANG S X, DAI J P. Design and experiments of water-to-air rapid transitions for a small cross-medium UAV[J]. Flight Dynamics, 2021, 39(5): 77-81, 94 (in Chinese).
|
| [12] |
王成, 杨杰, 姚辉, 等. 四旋翼无人机飞行控制算法综述[J]. 电光与控制, 2018, 25(12): 53.
|
|
WANG C, YANG J, YAO H, et al. An overview offlight control algorithms for quadrotors[J]. Electronics Optics & Control, 2018, 25(12): 53 (in Chinese).
|
| [13] |
BAI Y L, JIN Y F, LIU C H, et al. Nezha-F: Design and analysis of a foldable and self-deployable HAUV[J]. IEEE Robotics and Automation Letters, 2023, 8(4): 2309-2316.
|
| [14] |
唐胜景, 张宝超, 岳彩红, 等. 跨介质飞行器关键技术及飞行动力学研究趋势分析[J]. 飞航导弹, 2021(6): 7-13.
|
|
TANG S J, ZHANG B C, YUE C H, et al. Research trend analysis of key technologies and flight dynamics of transmedia aircraft[J]. Aerodynamic Missile Journal, 2021(6): 7-13 (in Chinese).
|
| [15] |
徐仁, 鞠世琦, 詹祺, 等. 旋翼跨介质试验系统设计与性能实验研究[J]. 飞行力学, 2024, 42(3): 89-94.
|
|
XU R, JU S Q, ZHAN Q, et al. Design of aerial-aquatic rotor test system and experimental study of rotor performance[J]. Flight Dynamics, 2024, 42(3): 89-94 (in Chinese).
|
| [16] |
李鹏, 石永康, 郭稳敏, 等. 四旋翼植保无人机机臂折叠机构轻量化设计[J]. 农机化研究, 2024, 46(6): 116-121.
|
|
LI P, SHI Y K, GUO W M, et al. Lightweight design of arm folding mechanism of quad-rotor plant protection UAV[J]. Journal of Agricultural Mechanization Research, 2024, 46(6): 116-121 (in Chinese).
|
| [17] |
史崇镔. 跨介质结构物出入水多相流体动力学特性研究[D]. 大连: 大连理工大学, 2021.
|
|
SHI C B. Study on multiphase hydrodynamic characteristics of cross-media structures entering and leaving water[D]. Dalian: Dalian University of Technology, 2021 (in Chinese).
|
| [18] |
匡建平, 吴训涛, 王虹旋. 细长圆柱体水中无约束运动的附加质量计算方法探析[J]. 四川兵工学报, 2014, 35(6): 143-145.
|
|
KUANG J P, WU X T, WANG H X. Computing method of extra mass with slender cylinder freely moving in water[J]. Journal of Sichuan Ordnance, 2014, 35(6): 143-145 (in Chinese).
|
| [19] |
侯国祥. 流体力学[M]. 北京: 机械工业出版社, 2015.
|
|
HOU G X. Fluid mechanics[M]. Beijing: China Machine Press, 2015 (in Chinese).
|
| [20] |
QI D, FENG J F, LI Y L. Dynamic model and ADRC of a novel water-air unmanned vehicle for water entry with in-ground effect[J]. Journal of Vibroengineering, 2016, 18(6): 3743-3756.
|
| [21] |
韩京清. 控制理论: 模型论还是控制论[J]. 系统科学与数学, 1989, 9(4): 328-335.
|
|
HAN J Q. Control theory, is it a model analysis approach or a direct control approach?[J]. Journal of Systems Science and Mathematical Sciences, 1989, 9(4): 328-335 (in Chinese).
|
| [22] |
王术波, 韩宇, 陈建, 等. 基于ADRC迭代学习控制的四旋翼无人机姿态控制[J]. 航空学报, 2020, 41(12): 324112.
|
|
WANG S B, HAN Y, CHEN J, et al. Active disturbance rejection control of UAV attitude based on iterative learning control[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(12): 324112 (in Chinese).
|
 )
)