王重1, 任众孚1, 白俊强2, 郎金溪1, 李俨1( )
)
收稿日期:2025-09-02
修回日期:2025-11-20
接受日期:2026-02-26
出版日期:2026-03-20
发布日期:2026-03-04
通讯作者:
李俨
Zhong WANG1, Zhongfu REN1, Junqiang BAI2, Jinxi LANG1, Yan LI1()
Received:2025-09-02
Revised:2025-11-20
Accepted:2026-02-26
Online:2026-03-20
Published:2026-03-04
Contact:
Yan LI
Supported by:摘要:
多飞行模态和高机动性是共轴高速直升机的典型特征,常规的飞/发分离控制策略难以满足高性能控制需求;同时,全包线范围内的高动态耦合、强外部干扰与时变飞行特性对控制策略的鲁棒性提出了严峻挑战。因此,提出了一种基于鲁棒显模型跟踪控制(REMFC)的飞/发综合控制架构。首先,基于旋翼与发动机的扭矩/转速关系,构建了包含共轴直升机、涡轴发动机和传动系统的飞/发综合仿真模型。其次,通过重构显模型跟踪控制前馈-反馈结构并引入扩张状态观测器(ESO),提出了一种鲁棒显模型跟踪控制策略,实现了对未建模动态、气动干扰及参数不确定性的在线估计与补偿,并证明了闭环跟踪误差一致有界。最后,基于鲁棒显模型跟踪控制策略,设计了飞/发综合控制律并实现了飞行操纵与发动机转速的综合控制与动态协调。全飞行包线内的多任务仿真结果表明,基于鲁棒显模型跟踪的共轴高速直升机飞/发综合控制方法在参考指令跟踪、扰动抑制和转速稳定性方面均优于传统方法,显著提升了共轴高速直升机在复杂飞行条件下的飞行性能与鲁棒性。
中图分类号:
王重, 任众孚, 白俊强, 郎金溪, 李俨. 基于鲁棒显模型跟踪的共轴高速直升机飞/发综合控制[J]. 航空学报, 2026, 47(7): 632745.
Zhong WANG, Zhongfu REN, Junqiang BAI, Jinxi LANG, Yan LI. Integrated flight/propulsion control of coaxial high-speed helicopter based on robust explicit model following control[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(7): 632745.
图 1
共轴高速直升机构型
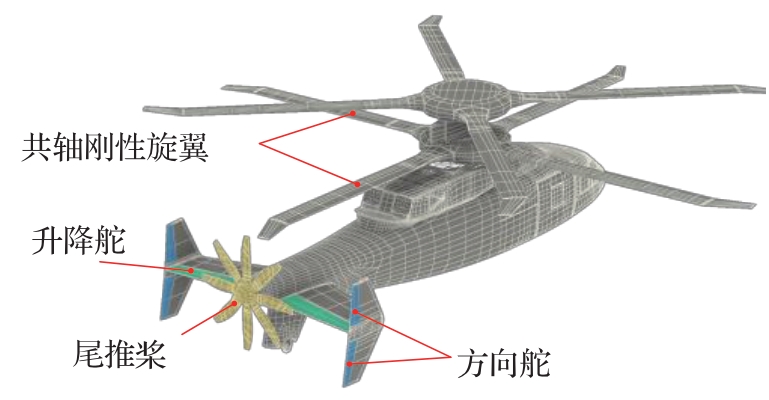
表1
共轴刚性旋翼直升机主要参数[27]
| 参数 | 数值 |
|---|---|
| 全机质量/kg | 5 500 |
| 旋翼半径/m | 5.49 |
| 旋翼桨叶片数 | 3×2 |
| 旋翼旋转速度/(r·min-1) | 274.1~360.0 |
| 下旋翼位置/m | (0, 0, -0.89) |
| 上下旋翼间隙/m | 0.77 |
| 尾推桨半径/m | 1.3 |
| 尾推桨桨叶片数 | 6 |
| 尾推桨旋转速度/(r·min-1) | 1 547.0 |
| 尾推桨位置/m | (-7.66, 0, 0) |
| 平尾气动中心位置/m | (-6.8, 0, 0.2) |
| 垂尾气动中心位置/m | (-6.8, 0, -0.5) |
表2
共轴高速直升机作动器位置及速率限制
| 操纵变量 | 位置限制/(°) | 速率限制/((°)·s-1) |
|---|---|---|
| 总距 | [0,20] | 40 |
| 总距差动 | [-5,5] | 40 |
| 横向周期变距 | [-6.25,6.25] | 40 |
| 纵向周期变距 | [-10,10] | 40 |
| 尾推桨总距 | [ | 20 |
| 升降舵 | [-20,20] | 80 |
| 方向舵 | [-20,20] | 70 |
图 2
涡轴发动机剖面示意图
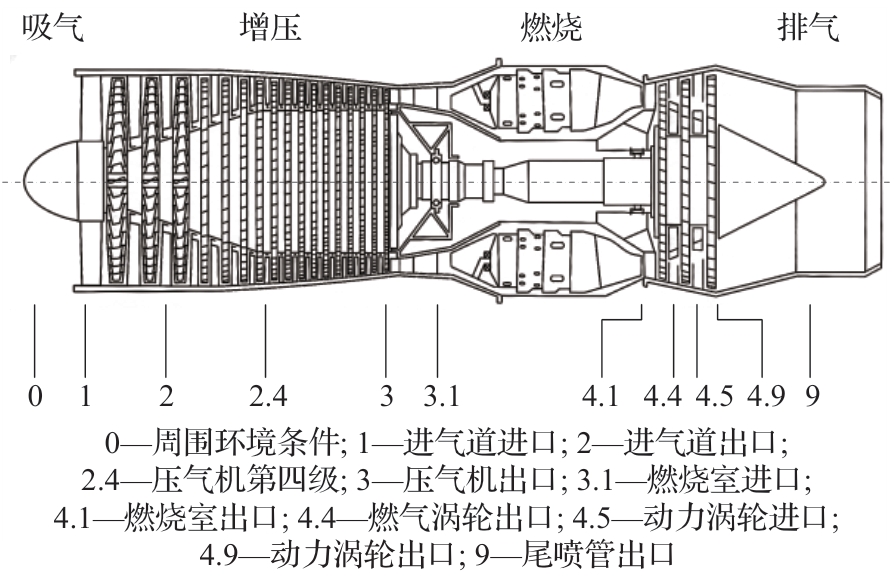
图 3
共轴高速直升机飞/发综合模型结构
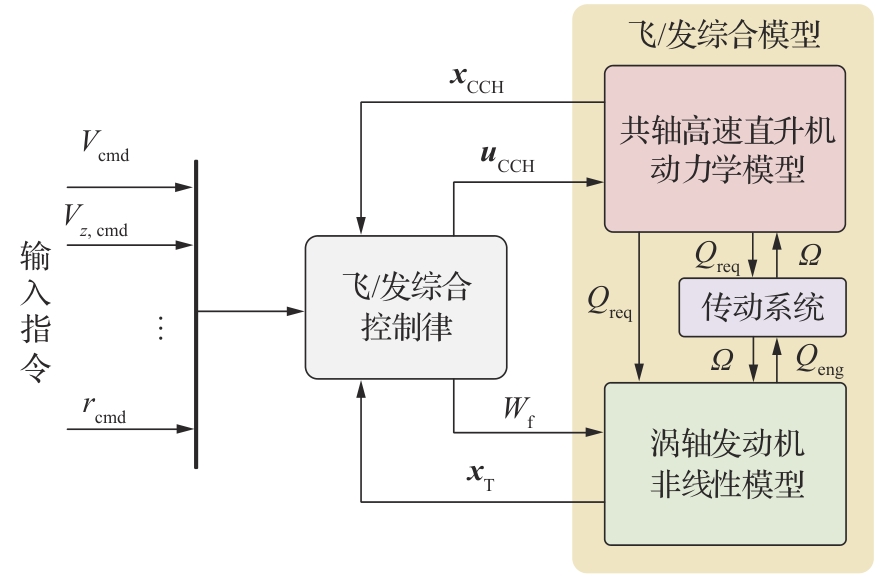

图 4
发动机动态响应曲线
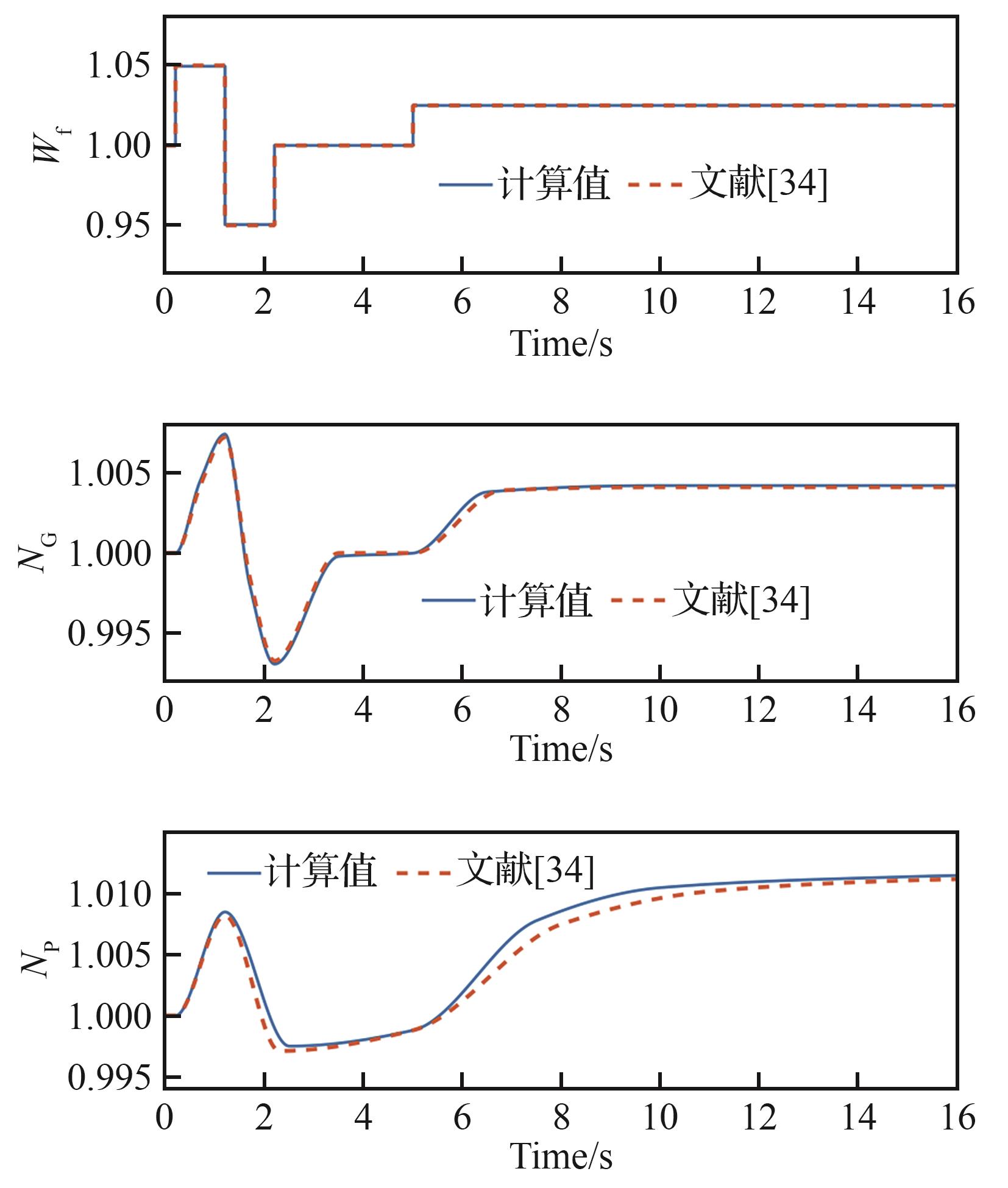

图 5
共轴直升机飞/发综合模型配平结果对比
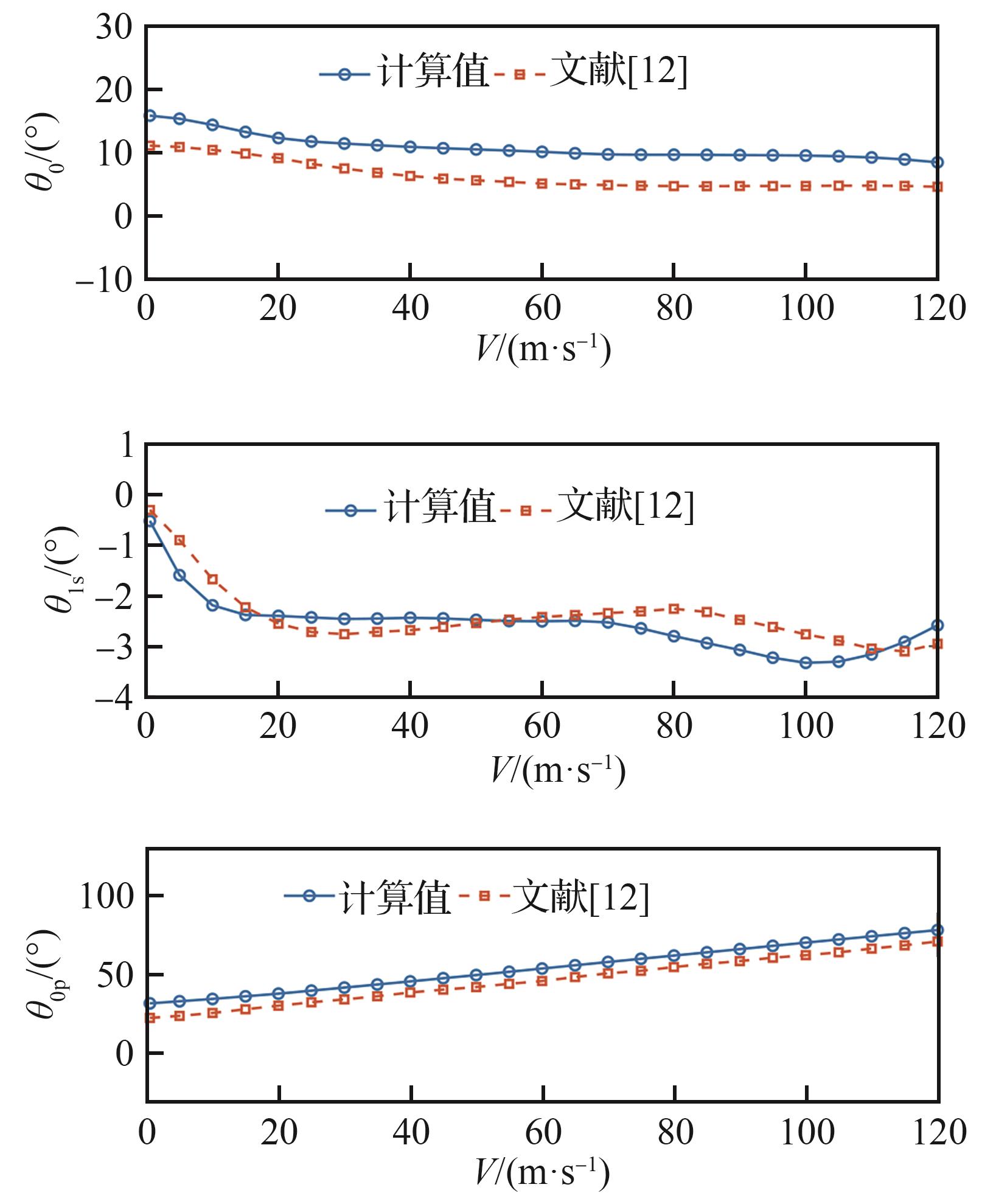

图 6
共轴直升机飞/发综合模型与XH-59A试飞数据对比
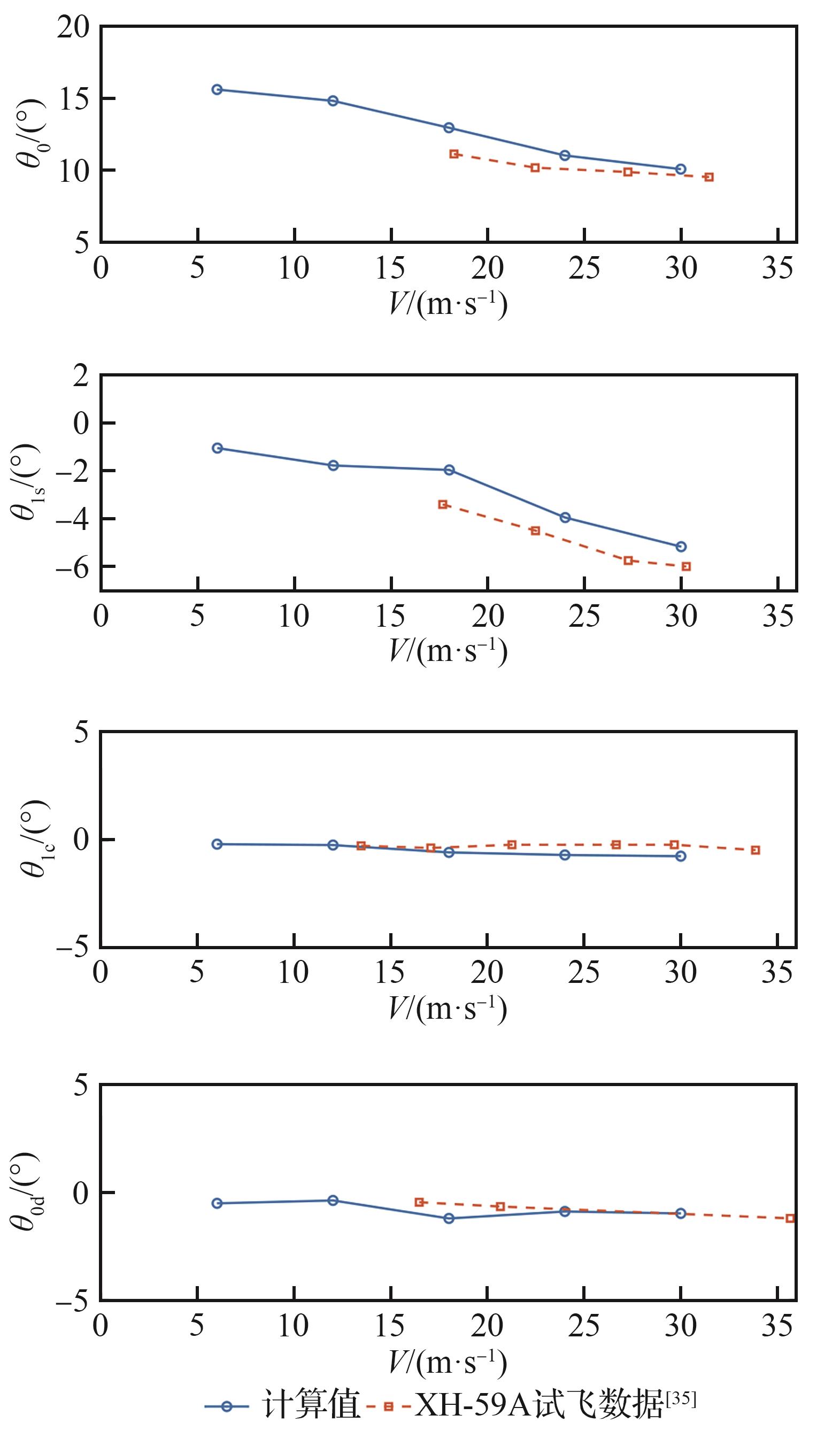
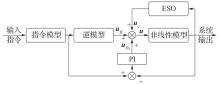
图 7
REMFC结构
表3
共轴高速直升机全模态操纵策略
| 飞行模态 | 滚转 | 俯仰 | 航向 | 垂向速度 | 飞行速度 |
|---|---|---|---|---|---|
| 直升机模态(0~20 m/s) | 横向 周期 变距 | 纵向周期变距 | 总距差动 | 总距 | 俯仰角 |
| 过渡模态(20~60 m/s) | 纵向周期变距 | 总距差动 | 总距 | 尾推桨总距 | |
| 固定翼模态(60~120 m/s) | 升降舵 | 方向舵 | 俯仰角 | 尾推桨总距 |
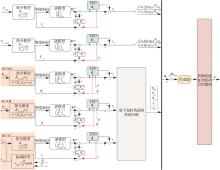
图 8
基于REMFC的共轴高速直升机控制结构图
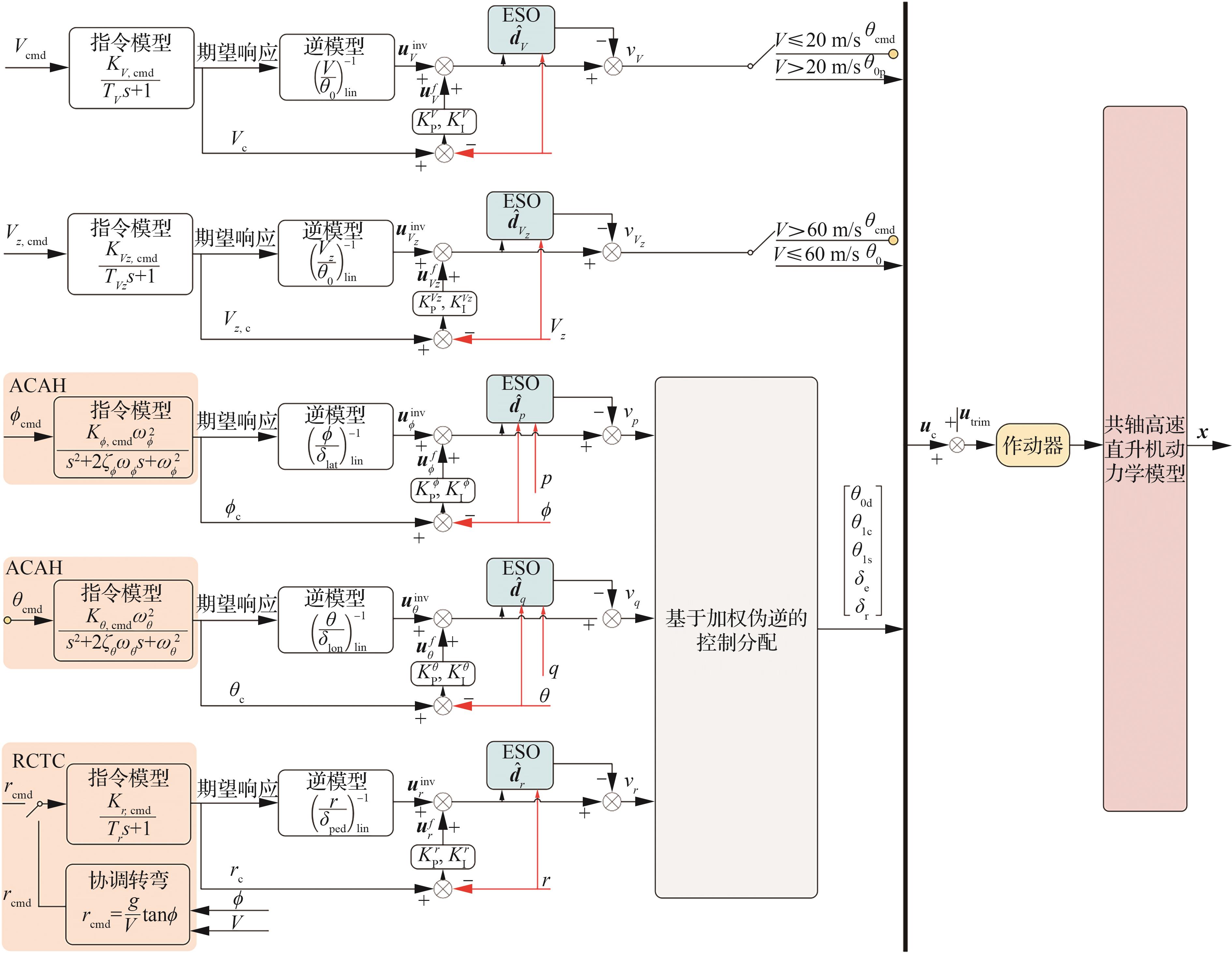

图 9
发动机控制结构图
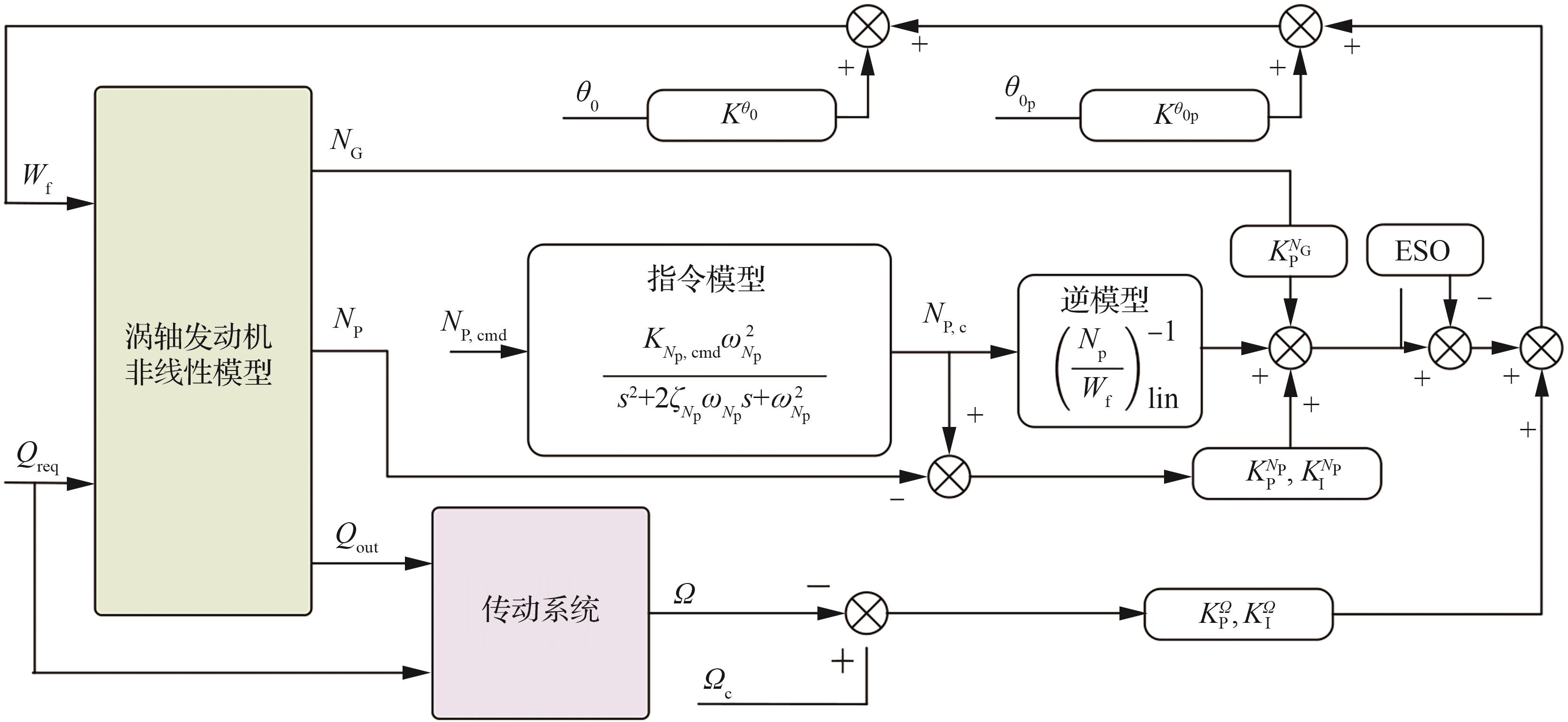
图 10
共轴高速直升机飞/发综合鲁棒控制方法架构
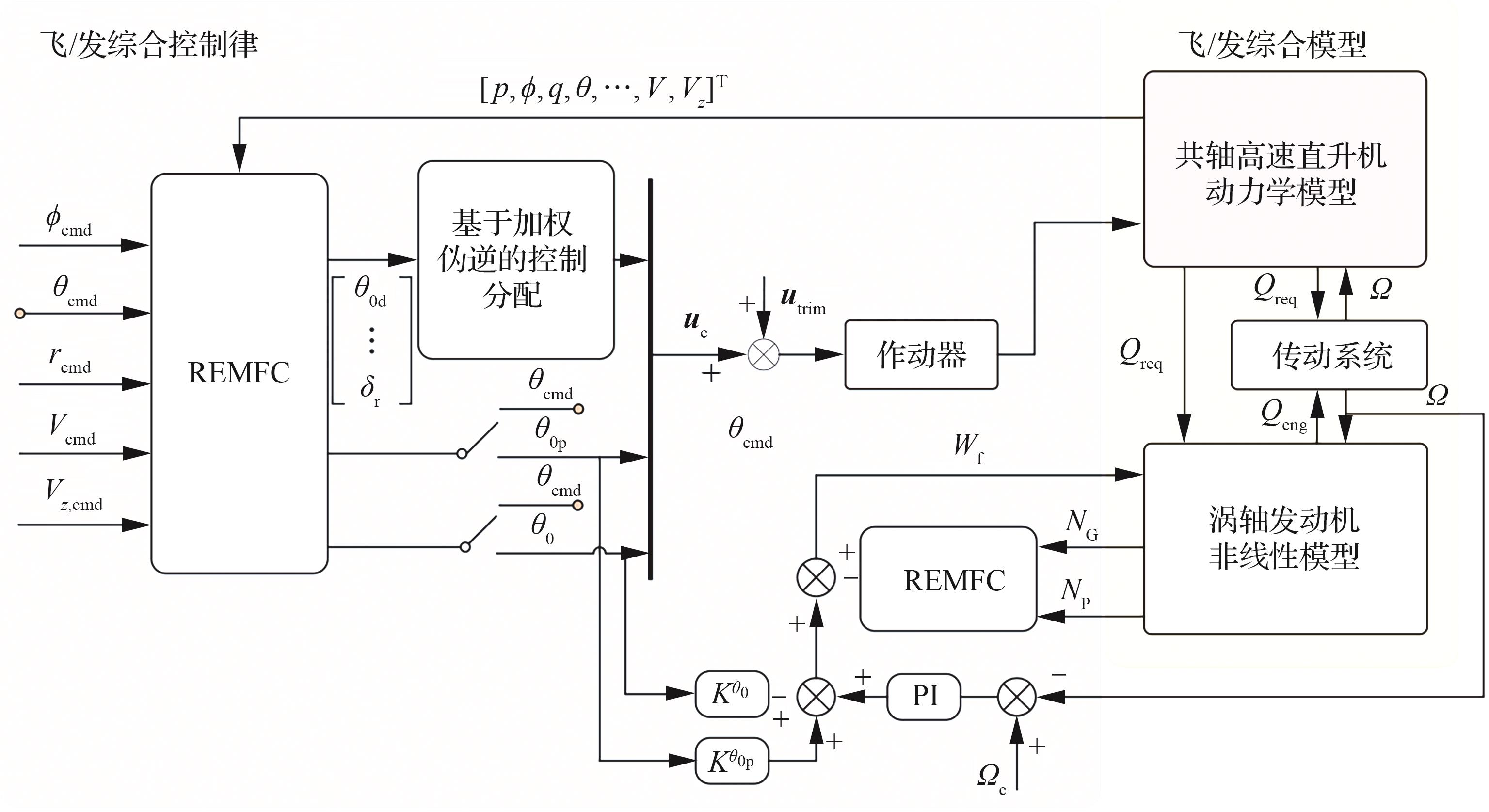
表4
飞/发综合控制系统参数
| 子系统 | 控制通道 | 指令模型参数 | PID控制器 | ESO 带宽 | ||
|---|---|---|---|---|---|---|
| 参数1 | 参数2 | 比例增益 | 积分增益 | |||
| 飞行控制 | 飞行通道(V) | TV =0.25 | =3 | =1 | 10 | |
| 垂向通道(Vz ) | =-5 | 10 | ||||
| 滚转通道( ) | =7 | 10 | ||||
| 俯仰通道( ) | =4 | 8 | ||||
| 航向通道( ) | =9 | 9 | ||||
| 发动机控制 | 动力涡轮(N P) | 10 | ||||
| 燃气涡轮(N G) | 0 | |||||
| 主旋翼( ) | =1 | |||||
| 总距前馈( ) | =2 | 0 | ||||
| 尾推桨总距前馈( ) | =2 | 0 | ||||
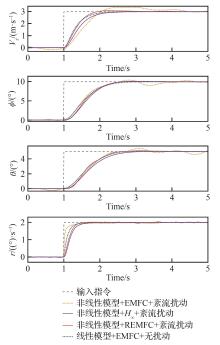
图 11
姿态跟踪效果对比
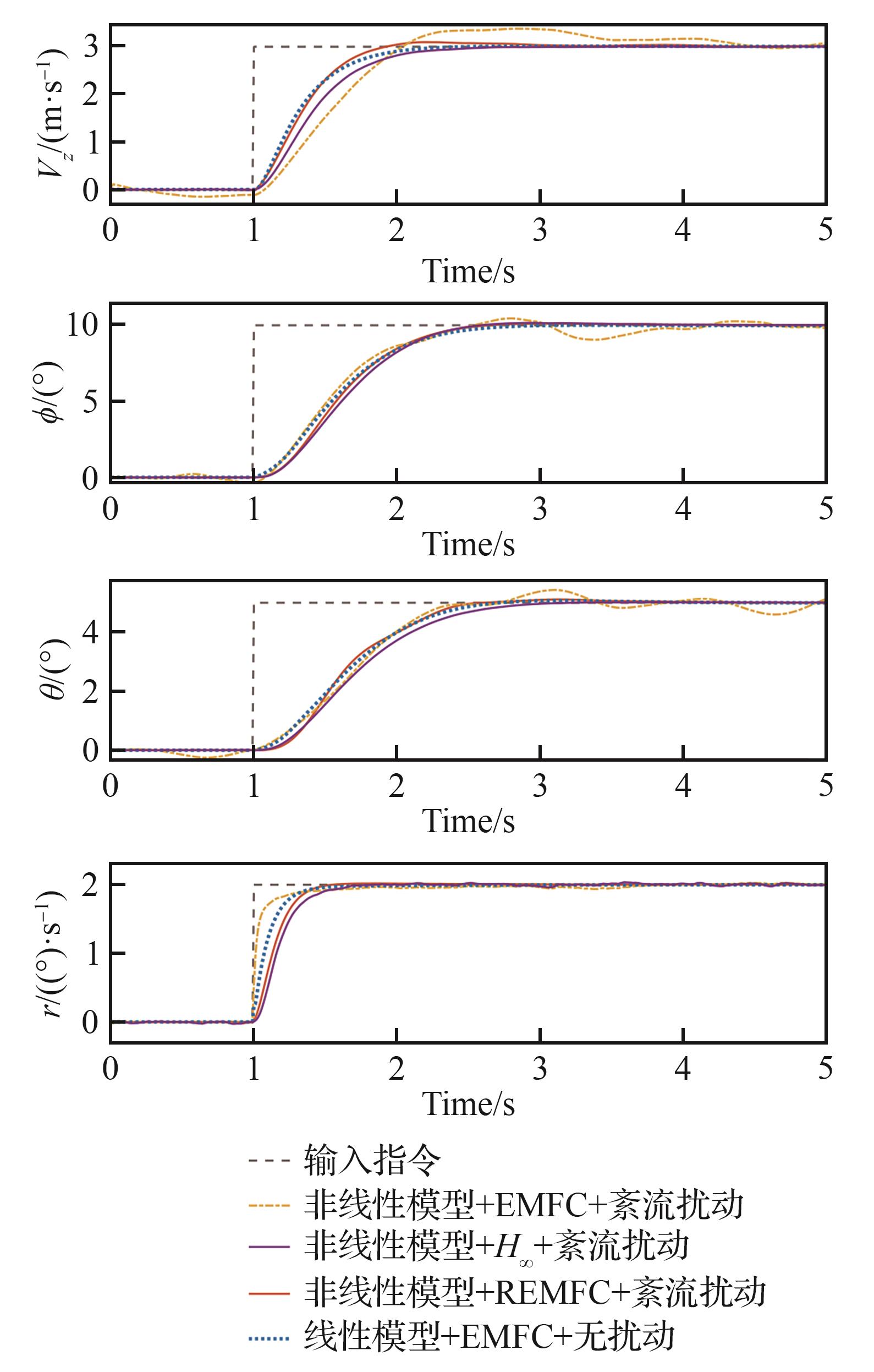
表5
不同控制方案的性能指标统计对比
| 评价指标 | 通道 | 控制策略 | |||
|---|---|---|---|---|---|
| 非线性+REMFC | 非线性+EMFC | 线性+EMFC | 非线性+H ∞ | ||
| 超调量/% | 垂向 | 3.227 4 | 12.634 5 | 0.463 3 | 0.277 8 |
| 滚转 | 1.043 5 | 4.543 9 | 0.040 0 | 1.618 0 | |
| 俯仰 | 2.209 1 | 8.671 1 | 1.364 7 | 0.391 4 | |
| 航向 | 0.959 2 | 1.356 2 | 0.000 0 | 1.848 4 | |
| 调节时间/s | 垂向 | 1.750 0 | 4.170 0 | 1.900 0 | 2.050 0 |
| 滚转 | 2.280 0 | 3.660 0 | 2.360 0 | 2.290 0 | |
| 俯仰 | 2.310 0 | 2.380 0 | 2.570 0 | ||
| 航向 | 1.370 0 | 1.350 0 | 1.330 0 | 1.480 0 | |
| ISE | 垂向 | 0.138 8 | 0.854 6 | 0.088 5 | 0.312 7 |
| 滚转 | 0.265 0 | 0.585 8 | 0.111 8 | 0.574 3 | |
| 俯仰 | 0.132 6 | 0.273 1 | 0.049 3 | 0.274 7 | |
| 航向 | 0.013 7 | 0.096 1 | 0.007 9 | 0.041 2 | |

图 12
干扰估计
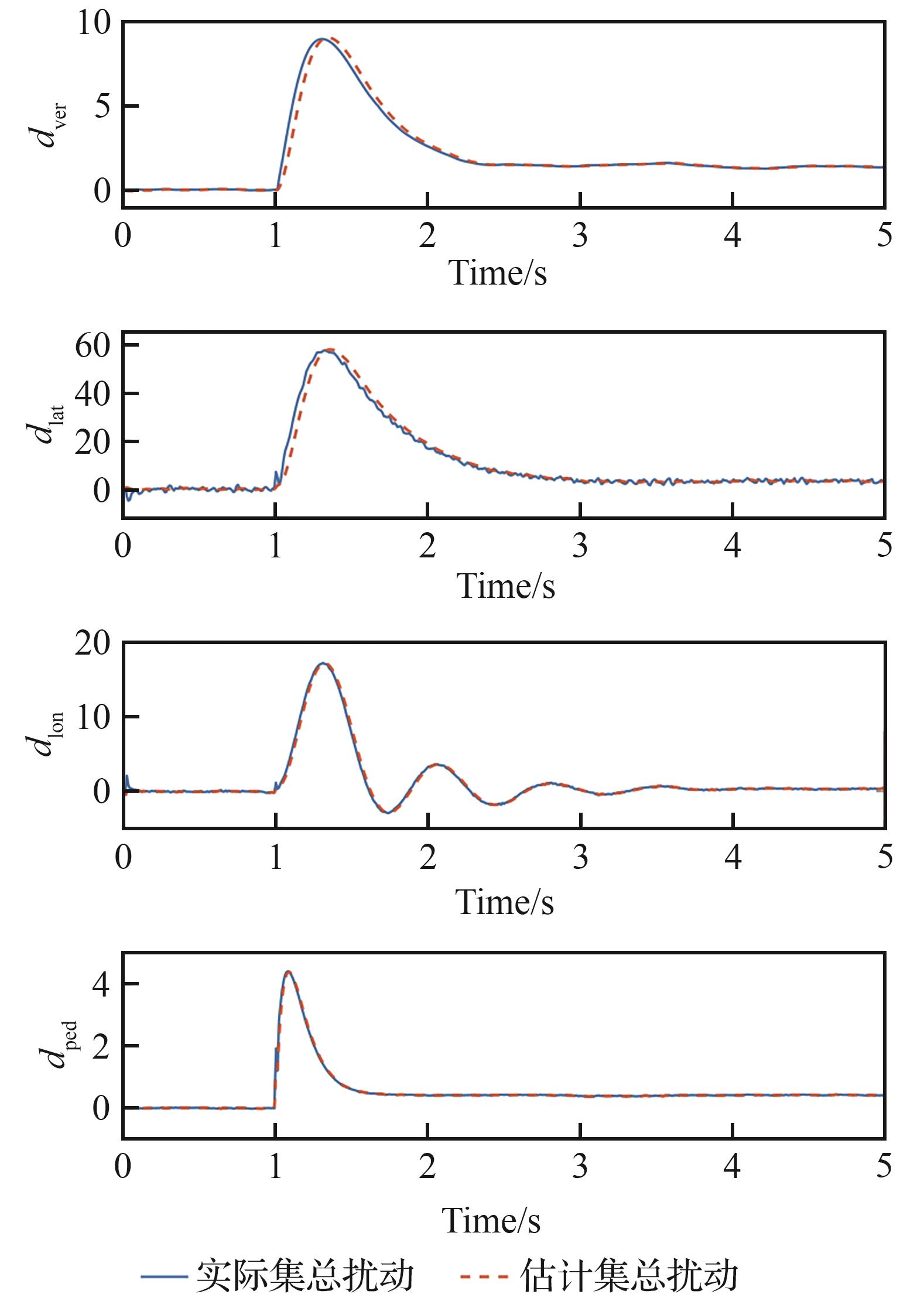
表6
控制策略说明
| 控制策略 | 控制方法 | |
|---|---|---|
| 飞行控制 | 发动机控制 | |
| REMFC-飞/发控制 | REMFC | REMFC |
| REMFC-飞行控制 | REMFC | EMFC |
| REMFC-发动机控制 | EMFC | REMFC |
图 13
REMFC控制策略对比
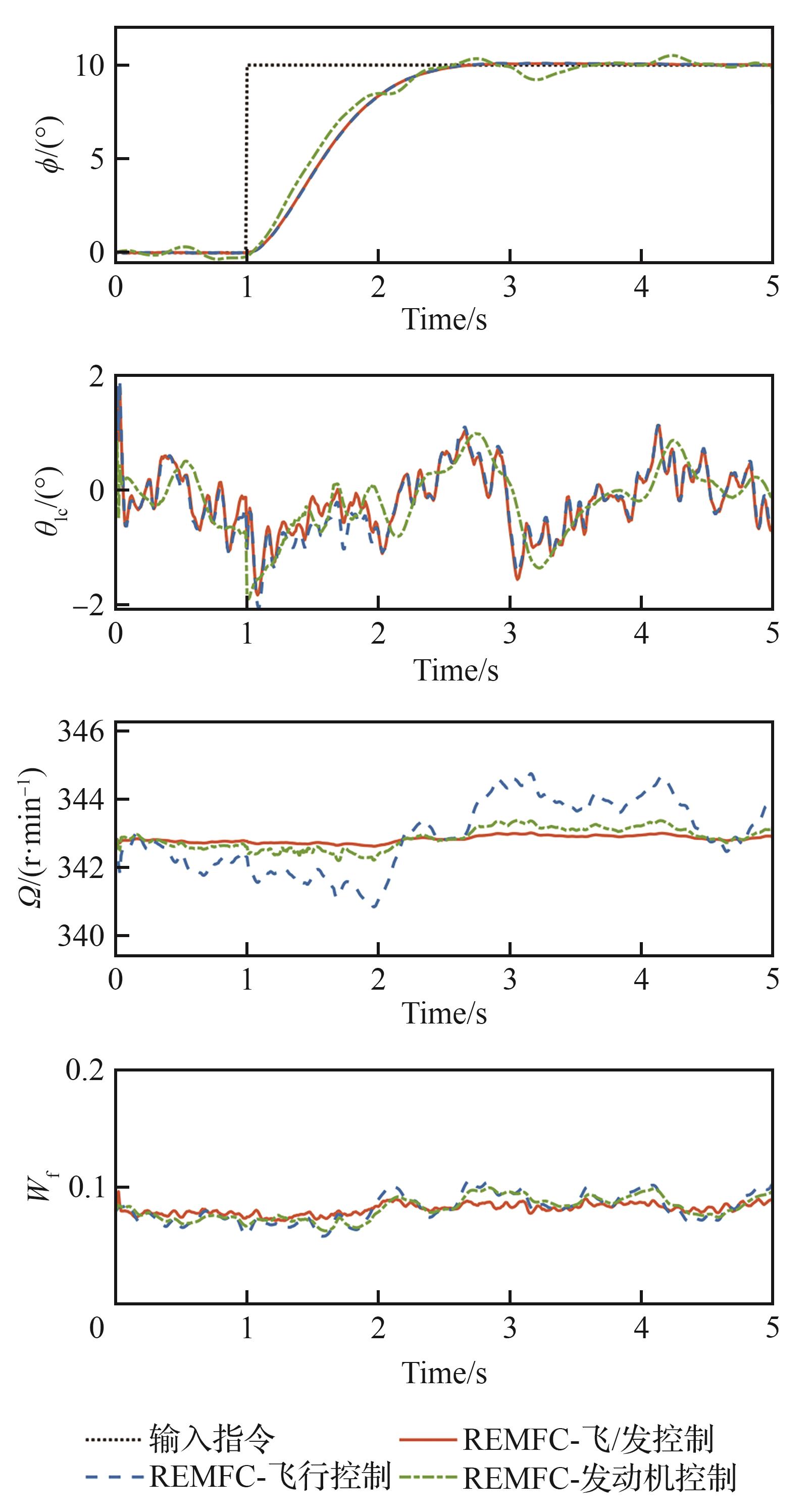
表7
滚转姿态指令跟踪性能
| 评价指标 | 飞/发综合 | 飞行控制 | 发动机控制 |
|---|---|---|---|
| 超调量/% | 0.860 3 | 0.931 6 | 5.103 9 |
| 调节时间/s | 2.310 0 | 2.370 0 | 4.260 0 |
| ISE | 0.172 1 | 0.193 8 | 0.980 1 |
表8
旋翼转速保持性能
| 评价指标 | 飞/发综合 | 飞行控制 | 发动机控制 |
|---|---|---|---|
| ISE | 0.052 2 | 5.223 1 | 0.475 8 |

图 14
40 m/s仿真结果
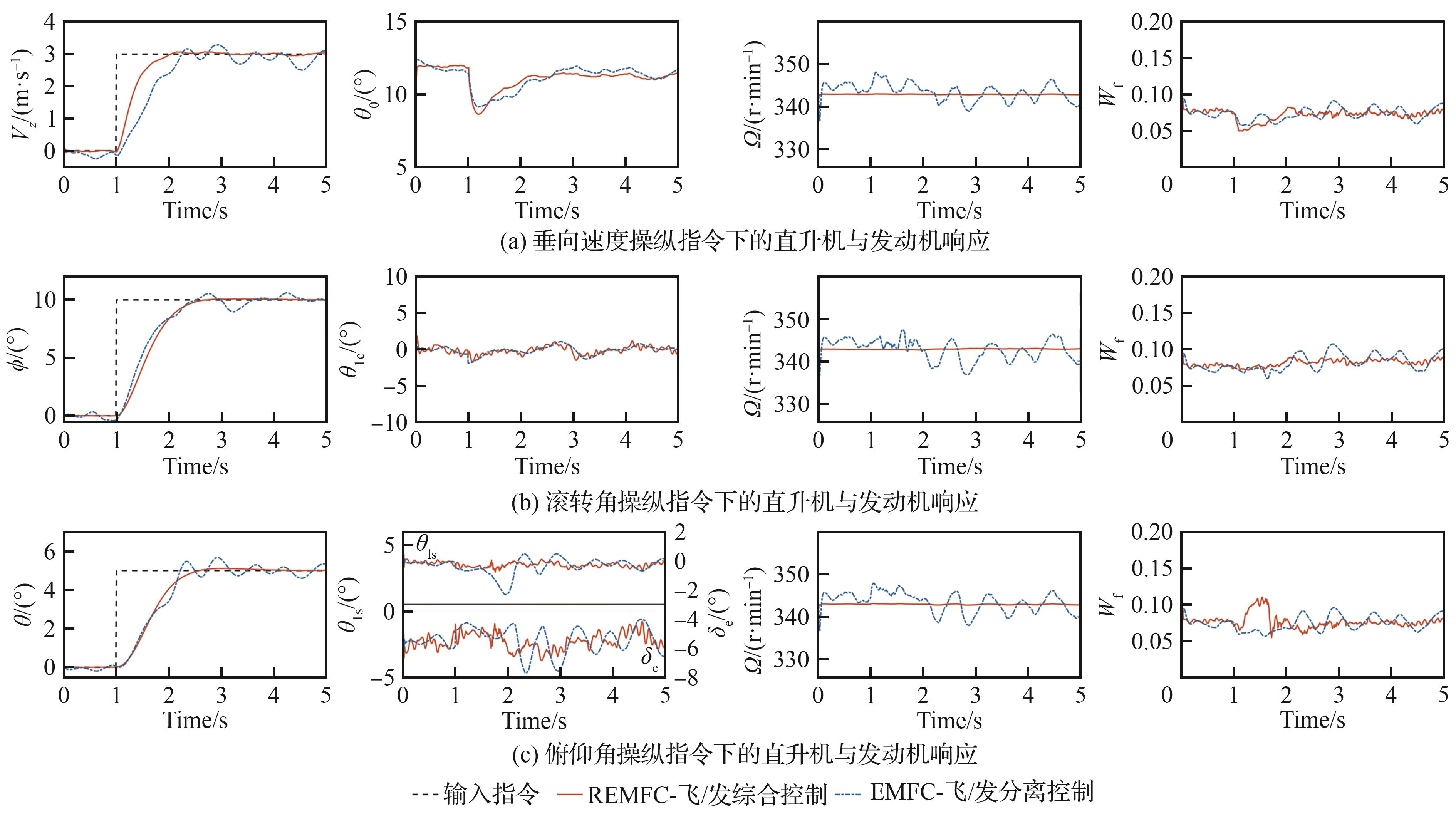

图 15
70 m/s仿真结果

表9
40 m/s不同控制策略的指令跟踪性能
| 通道 | 超调量/% | 调节时间/s | ISE | |||
|---|---|---|---|---|---|---|
| REMFC- 飞/发综合 | EMFC- 飞/发分离 | REMFC- 飞/发综合 | EMFC- 飞/发分离 | REMFC- 飞/发综合 | EMFC- 飞/发分离 | |
| 垂向 | 2.227 3 | 9.743 9 | 1.850 0 | 0.074 7 | 1.200 8 | |
| 滚转 | 0.860 3 | 6.134 7 | 2.310 0 | 4.320 0 | 0.172 1 | 1.090 5 |
| 俯仰 | 2.306 3 | 13.497 5 | 2.320 0 | 0.054 8 | 0.418 4 | |
表10
40 m/s不同控制策略的旋翼转速保持性能
| 通道 | ISE | |
|---|---|---|
| REMFC-飞/发综合 | EMFC-飞/发分离 | |
| 垂向 | 0.014 1 | 22.622 4 |
| 滚转 | 0.052 2 | 29.347 6 |
| 俯仰 | 0.035 4 | 28.909 7 |
表11
70 m/s不同控制策略的指令跟踪性能
| 通道 | 超调量/% | 调节时间/s | ISE | |||
|---|---|---|---|---|---|---|
| REMFC- 飞/发综合 | EMFC- 飞/发分离 | REMFC- 飞/发综合 | EMFC- 飞/发分离 | REMFC- 飞/发综合 | EMFC- 飞/发分离 | |
| 速度 | 0.328 9 | 4.575 6 | ||||
| 滚转 | 1.235 0 | 6.060 7 | 2.290 0 | 4.300 0 | 0.311 7 | 1.584 0 |
| 俯仰 | 2.732 3 | 8.811 3 | 2.410 0 | 4.510 0 | 0.036 8 | 0.216 7 |
表12
70 m/s不同控制策略的旋翼转速保持性能
| 通道 | ISE | |
|---|---|---|
| REMFC-飞/发综合 | EMFC-飞/发分离 | |
| 速度 | 4.617 9 | 180.387 7 |
| 滚转 | 0.065 7 | 62.230 6 |
| 俯仰 | 0.049 8 | 65.842 0 |
| [1] |
邓景辉. 高速直升机关键技术与发展[J]. 航空学报, 2024, 45(9): 529085.
|
|
|
|
| [2] |
|
| [3] |
杨庶. 具有边界保护性能的直升机飞-发一体化控制律[J]. 航空学报, 2023, 44(S1): 727560.
|
|
|
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
袁野, 陈仁良, 李攀. 共轴刚性旋翼飞行器配平特性及验证[J]. 南京航空航天大学学报, 2016, 48(2): 186-193.
|
|
|
|
| [21] |
陈立霞, 辛冀. 共轴高速直升机飞行力学建模与验证[J]. 飞行力学, 2022, 40(2): 25-32.
|
|
|
|
| [22] |
崔壮壮, 原昕, 赵国庆, 等. 共轴刚性旋翼高速直升机前飞性能操纵策略影响[J]. 航空学报, 2024, 45(9): 529256.
|
|
|
|
| [23] |
|
| [24] |
|
| [25] |
崔壮壮, 原昕, 赵国庆, 等. 操纵策略对高速直升机前飞性能的影响分析[J]. 飞行力学, 2023, 41(2): 41-46.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
周国仪, 胡继忠, 曹义华, 等. 共轴式直升机双旋翼载荷计算模型研究[J]. 航空动力学报, 2003, 18(3): 343-347.
|
|
|
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
仇钰清, 李俨, 郎金溪, 等. 高速直升机过渡模态鲁棒自适应姿态控制[J]. 航空学报, 2024, 45(9): 529927.
|
|
|
|
| [39] |
|
| [40] |
|
| [41] |
|
| [1] | 白裕峰, 邹奇彤, 黄锐, 刘豪杰, 冉玉国. 柔性飞翼布局机翼气动弹性响应控制与风洞试验[J]. 航空学报, 2025, 46(14): 331452-331452. |
| [2] | 郑峰婴, 沈志敏, 李雅琴, 徐楷钊, 王新华. 共轴高速直升机增益自适应多模式切换控制[J]. 航空学报, 2024, 45(9): 529088-529088. |
| [3] | 逯明清, 廖飞, 高福奎, 邢贝贝, 吴世崇, 范召林, 苏玉民, 吴文华. 基于扰动观测器增强的同轴HAUV自适应反步跟踪控制[J]. 航空学报, 2024, 45(23): 330361-330361. |
| [4] | 张清瑞, 刘赟韵, 孙慧杰, 朱波. 固定翼无人机紧密编队的鲁棒协同跟踪控制[J]. 航空学报, 2024, 45(1): 629233-629233. |
| [5] | 殷泽阳, 邢友朋, 韩飞, 魏才盛, 廖宇新. 编队航天器协同绕飞非合作目标的全驱预设性能控制[J]. 航空学报, 2024, 45(1): 628904-628904. |
| [6] | 刘坤达, 刘雪明, 朱波, 张清瑞. 面向狭窄通道穿越的多机编队安全鲁棒控制[J]. 航空学报, 2023, 44(S2): 729768-729768. |
| [7] | 孙笑云, 吴树范, 沈强. 基于LMI的输出跟踪自适应鲁棒无拖曳控制[J]. 航空学报, 2023, 44(S1): 727654-727654. |
| [8] | 赵旭, 齐国元, 蔚昕晨, 胡建兵, 李霞. 补偿函数观测器及其在飞行器姿态控制中的应用[J]. 航空学报, 2023, 44(9): 327224-327224. |
| [9] | 李政, 于剑桥, 赵新运. 空空导弹敏捷转弯固定时间收敛滑模控制[J]. 航空学报, 2023, 44(8): 327262-327262. |
| [10] | 徐世昊, 关英姿, 浦甲伦, 韦常柱. VTHL运载器再入返回预设时间滑模控制[J]. 航空学报, 2023, 44(7): 326857-326857. |
| [11] | 张亮, 李丹钰, 崔乃刚, 李源. 垂直起降可重复使用运载火箭全剖面飞行预设性能控制[J]. 航空学报, 2023, 44(23): 628103-628103. |
| [12] | 张新昱, 谢思宇, 陶洋, 李滚. 面向无人机空中加油紧密编队的鲁棒控制方法[J]. 航空学报, 2023, 44(20): 628425-628425. |
| [13] | 孟晓, 马丹, 林宏军, 陈超. 航空发动机燃烧室热声不稳定的预设性能控制[J]. 航空学报, 2023, 44(17): 128182-128182. |
| [14] | 杨晓伟, 葛曜文, 邓文翔, 姚建勇, 周宁. 航空发动机导叶控制机构作动筒主动容错控制[J]. 航空学报, 2022, 43(9): 625464-625464. |
| [15] | 李宁, 刘志勇, 王娜, 杨垒. 基于DUEA的天线伺服控制系统仿真[J]. 航空学报, 2022, 43(2): 324986-324986. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学