曾国奇1, 牛子凡2, 郑丽丽1( ), 李杰2, 郝得霖2
), 李杰2, 郝得霖2
Guoqi ZENG1, Zifan NIU2, Lili ZHENG1(), Jie LI2, Delin HAO2
摘要:
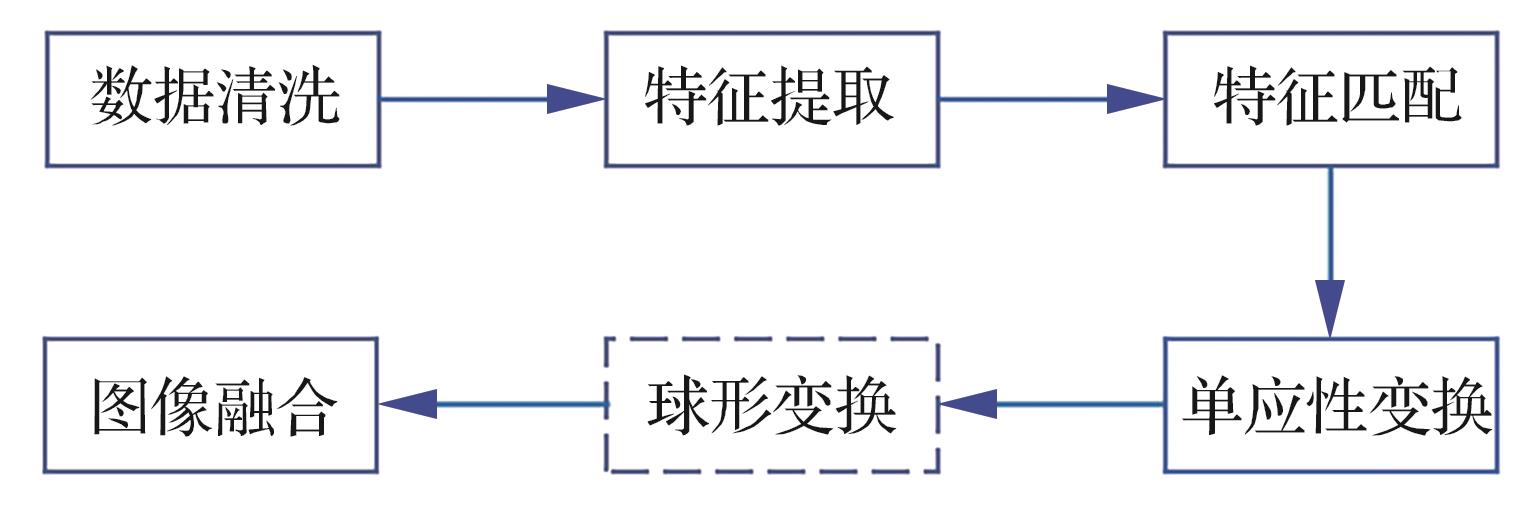
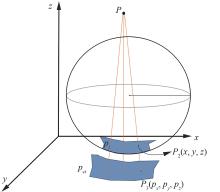
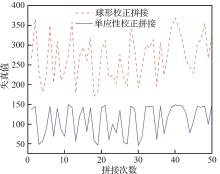
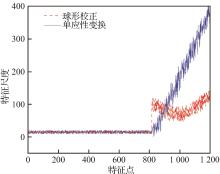
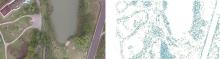
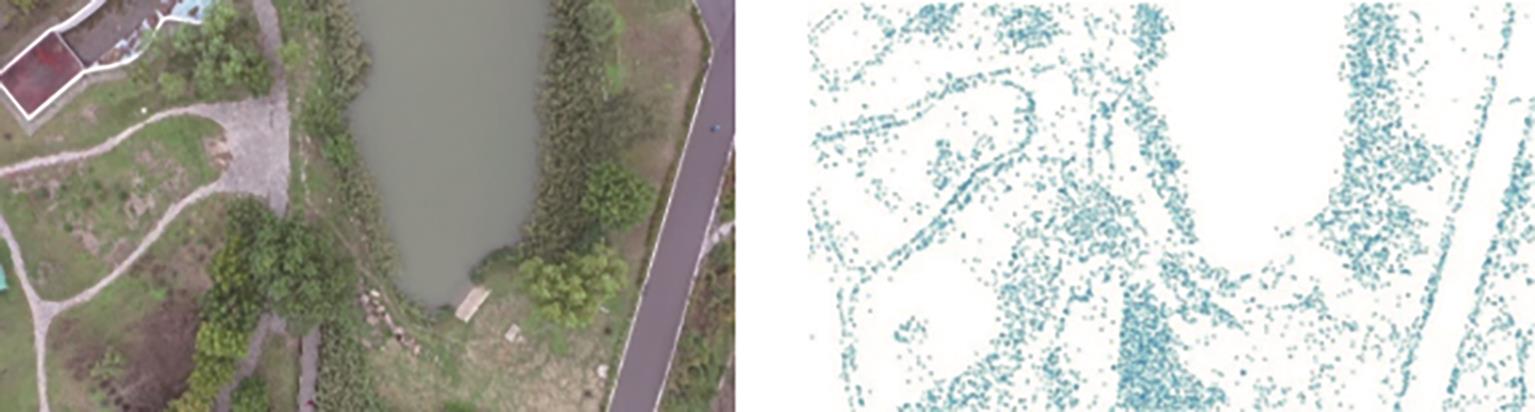
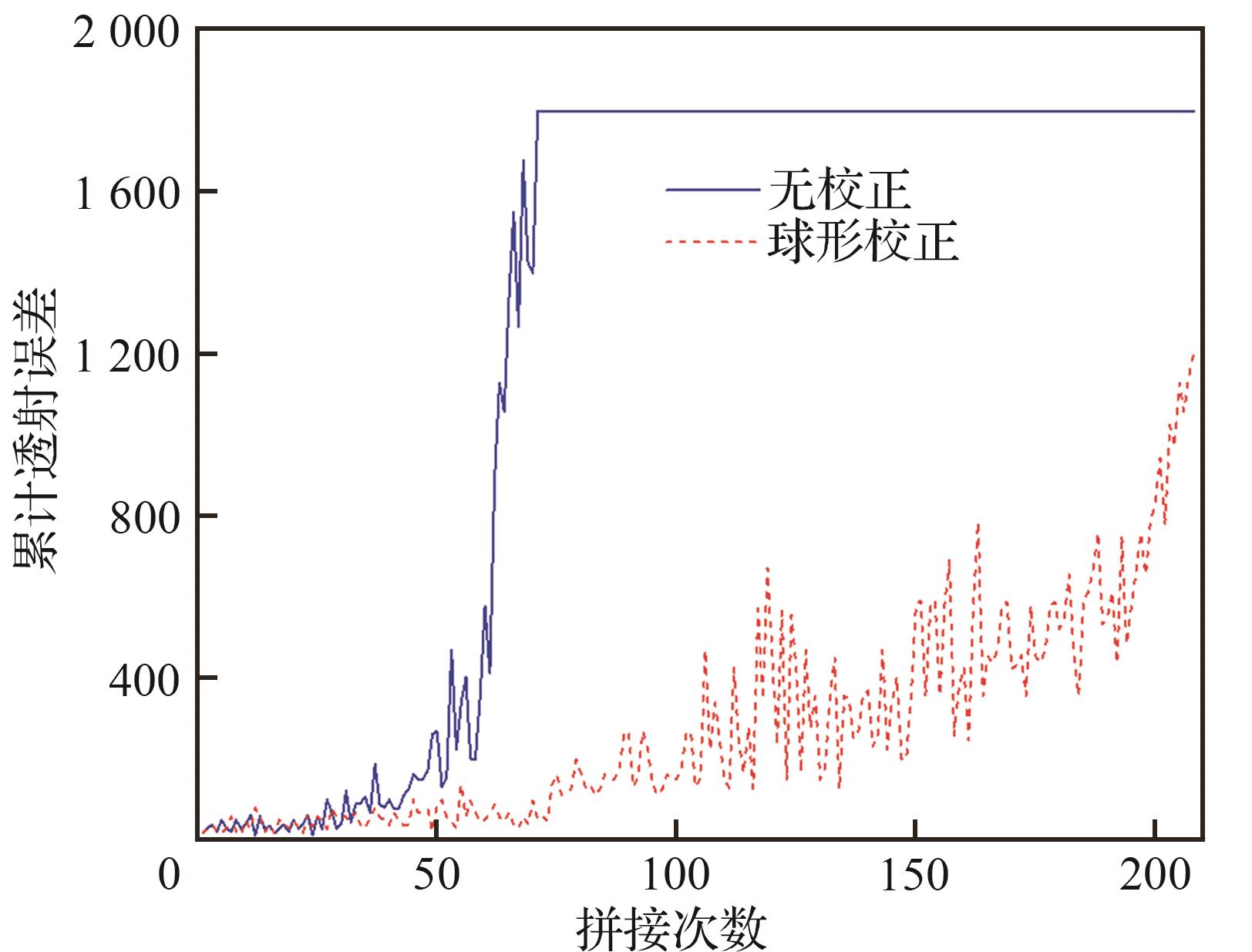
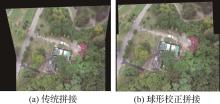
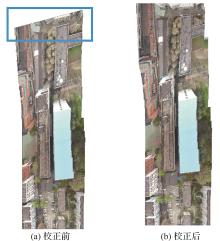
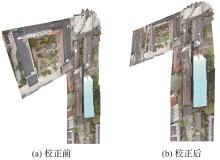
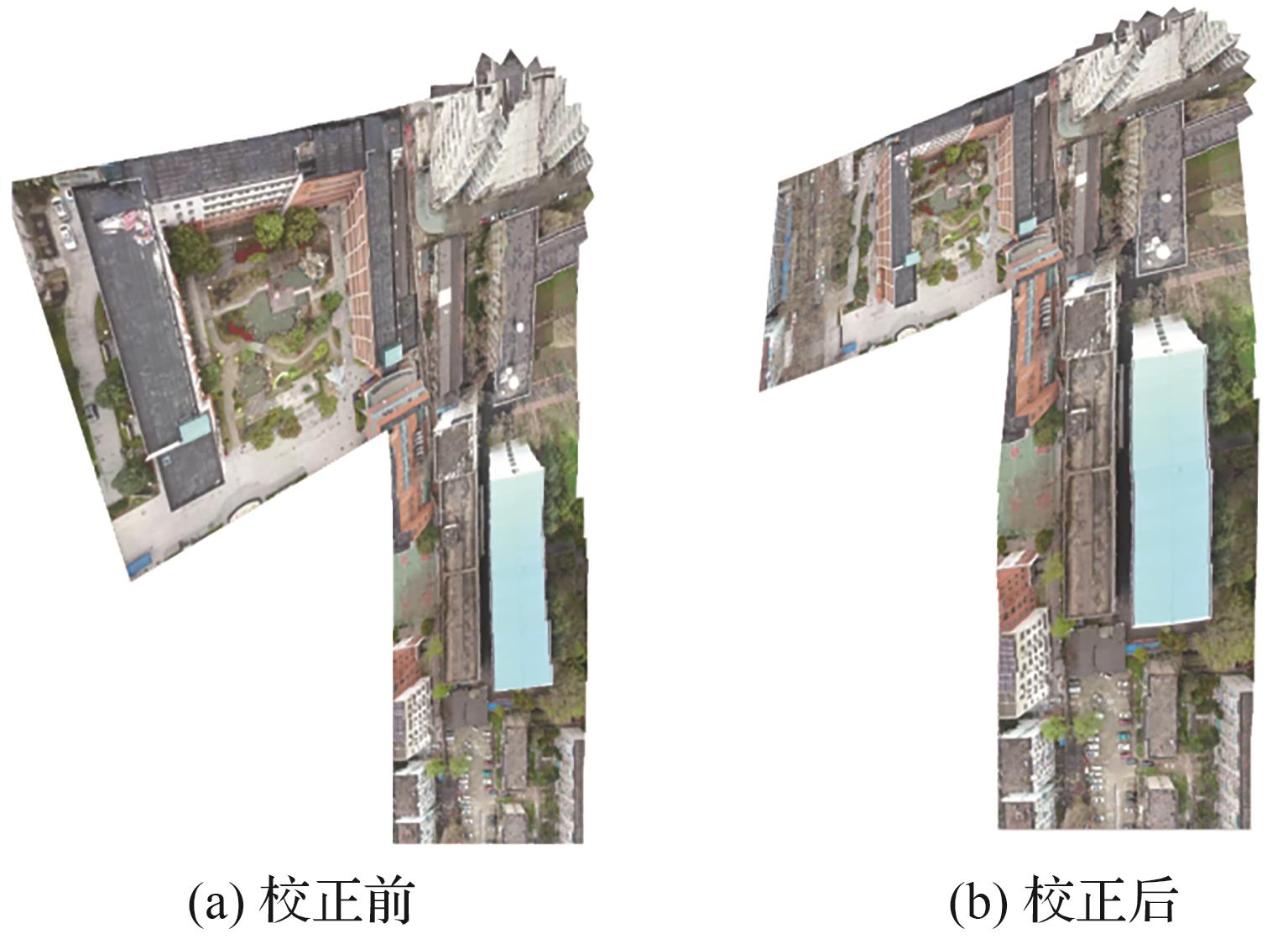
针对火灾态势监测等应急场景,需要通过无人机航拍获得现场的态势图,传统的基于无人机拍摄图片拼接方法通常存在时效性低的问题,而基于视频实时拼接方法,存在单应性误差积累,拼接中断的问题。设计并实现了一种基于球形变换的无人机实时视频图像拼接方法,加入球形变换后可以为大角度拼接增加全局一致性,并且仅仅计算单个单应性矩阵,保证了算法在角度鲁棒性下的拼接效率。首先,计算生成图像的加速鲁棒特征(SURF)特征描述,用匹配算法对连续图像之间的SURF特征进行匹配,然后,用随机抽样一致性算法对匹配进行筛选,根据图像之间的匹配关系,计算单应性变换矩阵,拆分单应性矩阵后计算误差校正球参数,在经过球形变换校正后利用单应性完成图像拼接,最后,进行图像融合。试验结果表明:所提的基于球形变换的视频图像拼接方法可以提高传统图像拼接的时效性(与形状保留半投影(SPHP)算法相比,平均每2张拼接时间从2 345.25 ms减少到1 528.6 ms,算法效率提升了34.8%)和相机角度变化下的鲁棒性,且在大角度、大视觉差的情况下仍能有着良好的表现。
中图分类号: