Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (7): 432464.doi: 10.7527/S1000-6893.2025.32464
• Material Engineering and Mechanical Manufacturing • Previous Articles
Zhenyang HAO1, Shang CAO1( ), Fengting ZHANG1, Lanlan HOU2
), Fengting ZHANG1, Lanlan HOU2
Received:2025-06-23
Revised:2025-07-16
Accepted:2025-07-29
Online:2025-10-10
Published:2025-10-09
Contact:
Shang CAO
Supported by:CLC Number:
Zhenyang HAO, Shang CAO, Fengting ZHANG, Lanlan HOU. Design of a hub-mounted active actuation system for helicopters[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(7): 432464.
Table 1
Comparison of ACSR and HAAS vibration suppression techniques
| 技术类型 | ACSR | HAAS |
|---|---|---|
| 抑振原理 | 机身多节点反共振力抵消 | 桨毂处直接抵消振动源载荷 |
| 安装位置 | 机身多处 | 桨毂单点 |
| 作动器数量 | 多组 | 单组 |
| 重量负担 | 高 | 低 |
| 减振效率 | 较低 | 高 |

Fig.1
Layout of HAAS

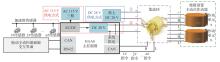
Fig.2
HAAS signal and power flow situation
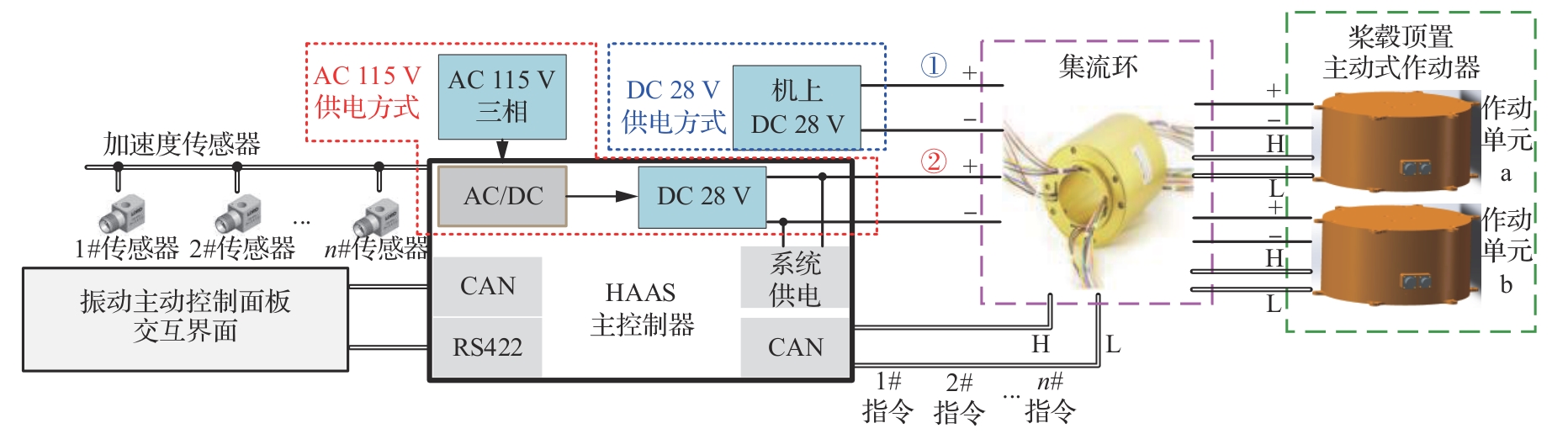
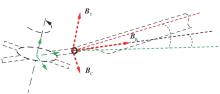
Fig.3
Helicopter rotor hub vibratory forces
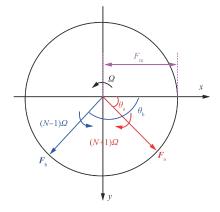
Fig.4
(N±1)Ω rotating components in hub plane[16]
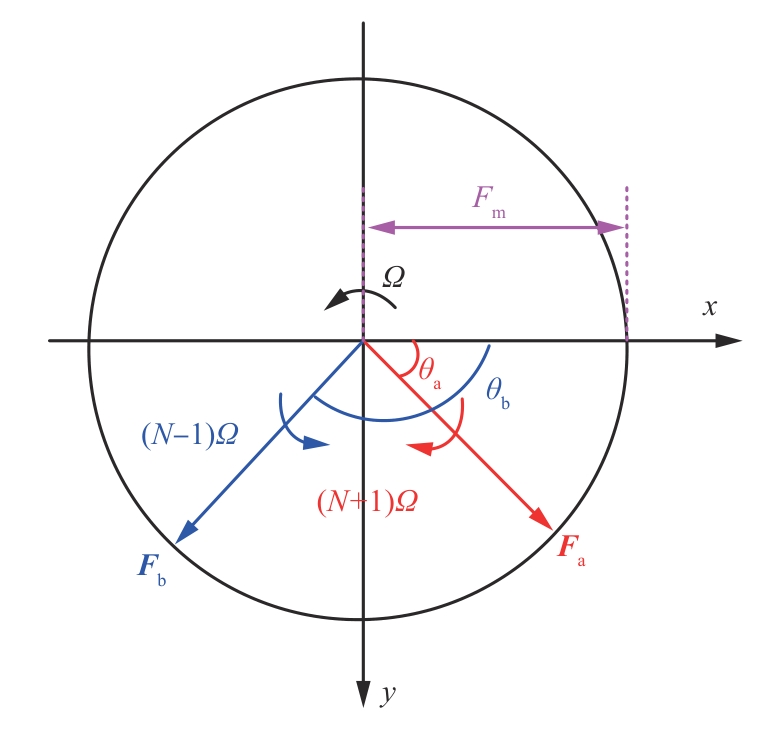
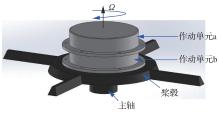
Fig.5
Top-mounted active actuator for rotor hub
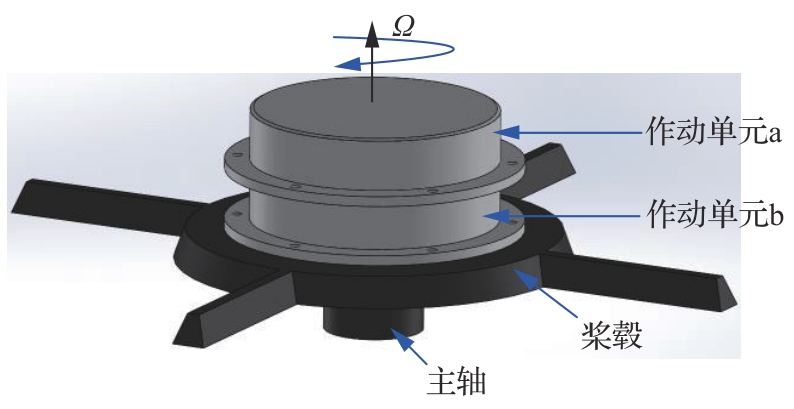
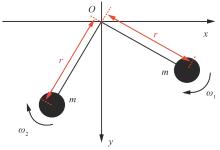
Fig.6
Mass-block motion in actuator unit
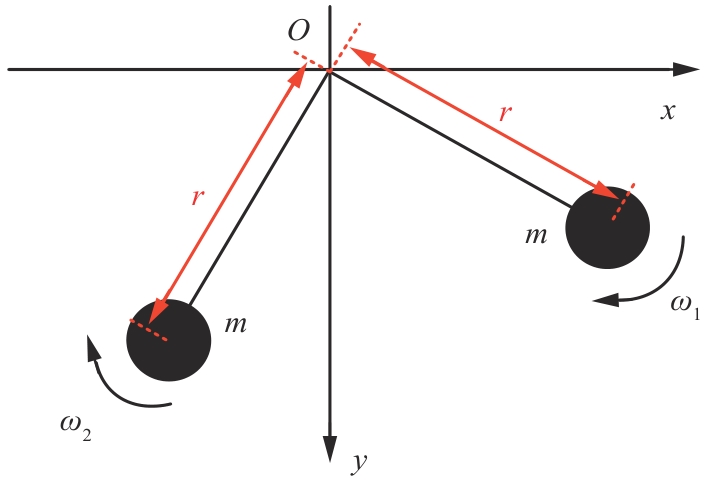

Fig.7
Modeling and synthesis of output force for two mass blocks
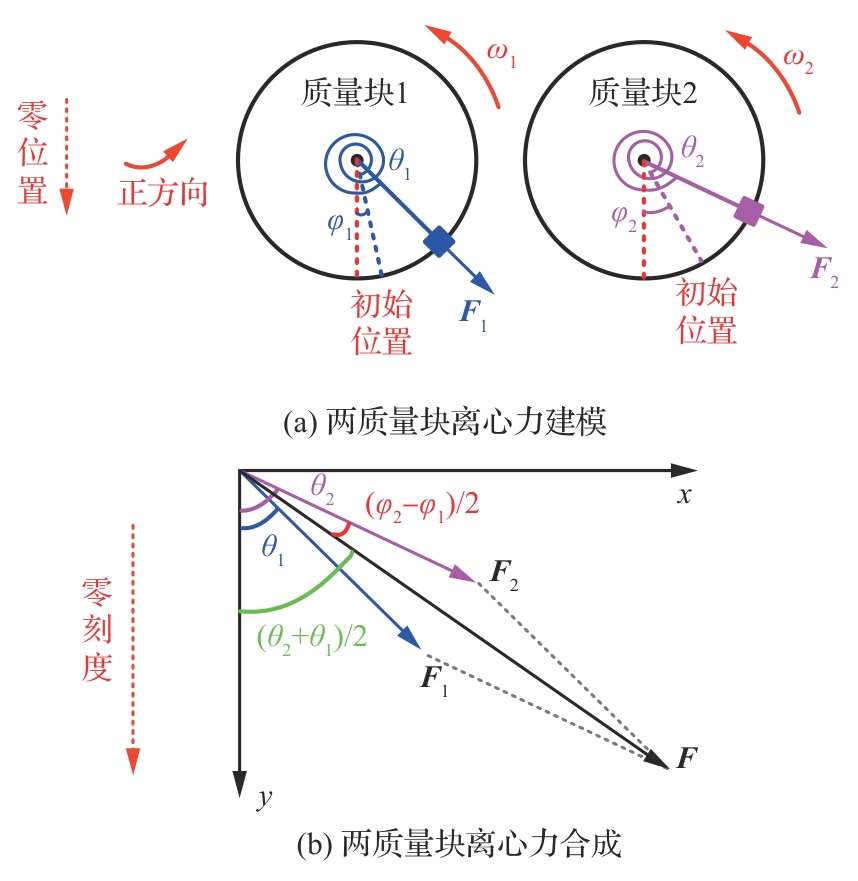
Table 2
Output force performance metrics of actuation unit
| 描述 | 参数(标幺化处理) |
|---|---|
| 工作频率 | 额定为5,4和6下均能稳定工作 |
| 频率误差 | ≤0.2% |
| 最大输出力幅值 | ≥10 |
| 最小力指令输出力幅值 | ≤0.5 |
| 相位稳态误差 | ≤1.8° |
| 动态响应时间 | ≤1 |
| 掉电自平衡时输出力幅 | ≤0.5 |
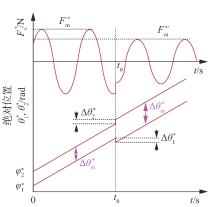
Fig.8
Motor position setting in variable force amplitude dynamic response process
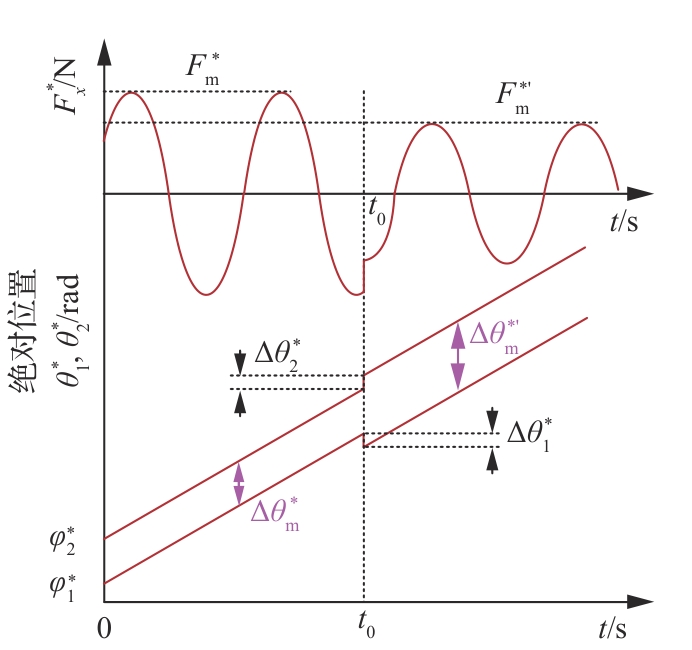
Fig.9
Motor position setting in variable phase dynamic response process
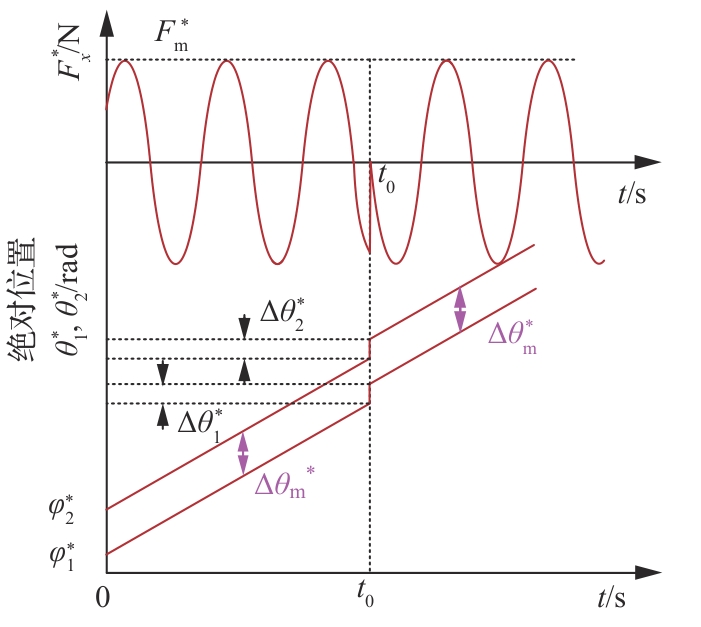
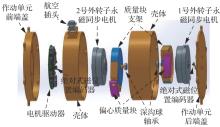
Fig.10
Exploded view of actuation unit
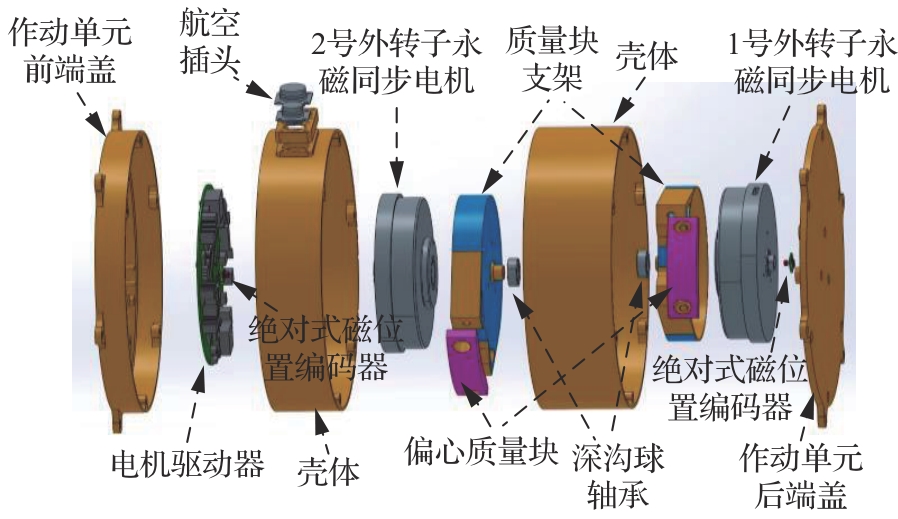

Fig.11
Axis offset structure design
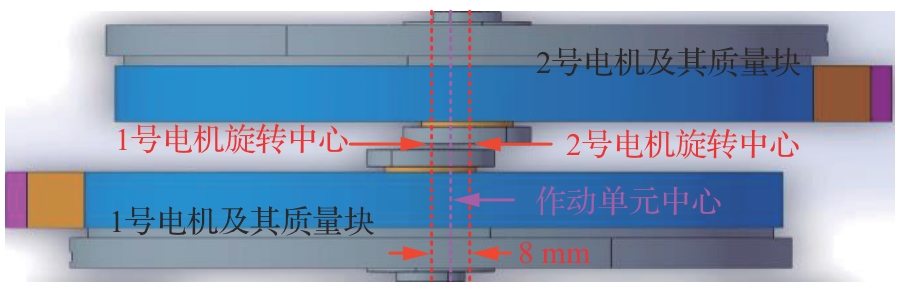
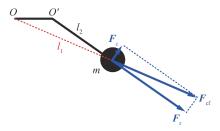
Fig.12
Force analysis of mass block in self-balancing process
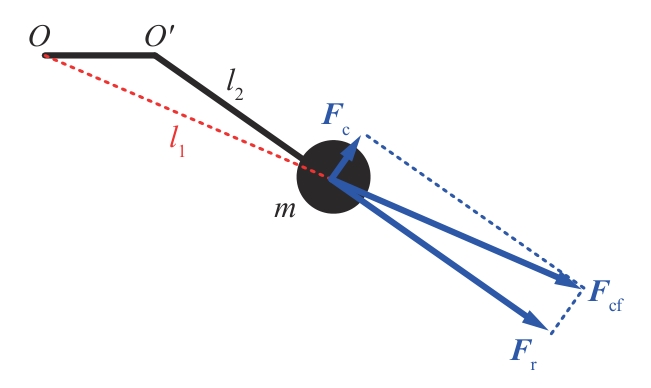
Table 3
Bearing-related parameters of actuation unit
| 序号 | 参数 | 数值 |
|---|---|---|
| 1 | f | 0.001 5 |
| 2 | η | 1.5 |
| 3 | g | 1.5 |
| 4 | t | 1.2 |
| 5 | E/( N∙m-2) | 200×109 |
| 6 | D/m | 0.028 |
| 7 | D in/m | 0.015 |
| 8 | z | 10 |
| 9 | P | F r |
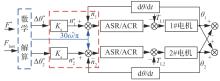
Fig.13
Position trajectory optimal strategy control diagram
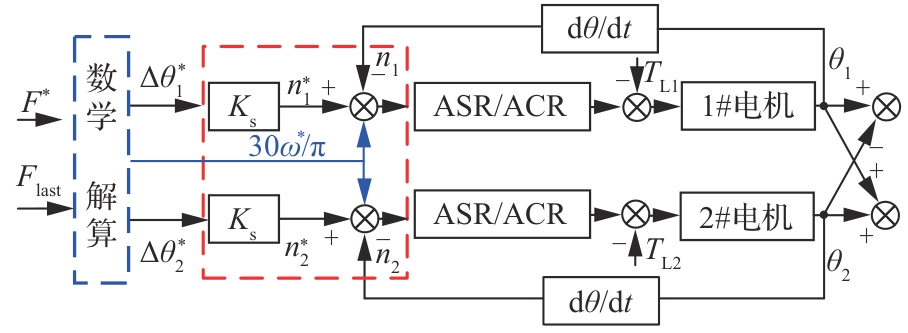

Fig.14
Control block diagram of the single-motor in actuation unit
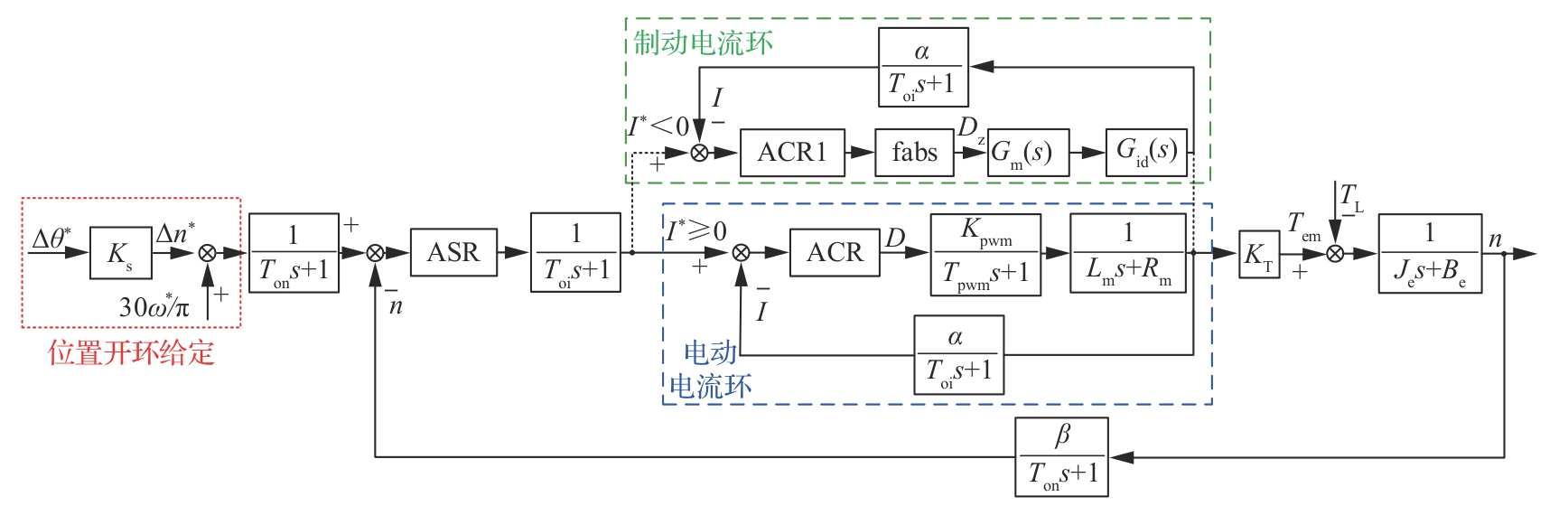
Table 4
Drive/brake mode current loop parameters
| 环路 | 比例系数 | 积分系数 | 截止频率/ (rad·s-1) |
|---|---|---|---|
| 电动电流环 | 2.2 | 1 866.678 | 6 070 |
| 制动电流环 | 0.143 | 42.857 | 6 370 |
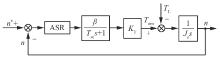
Fig.15
Simplified transfer function diagram of speed loop[20]
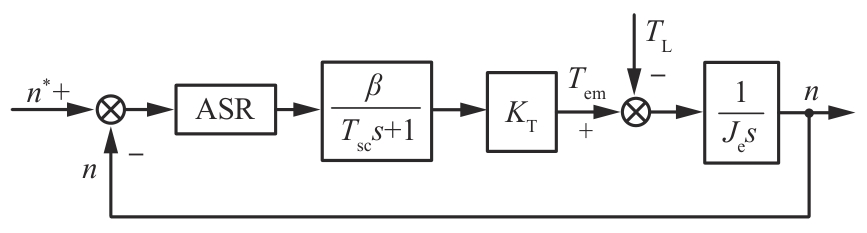
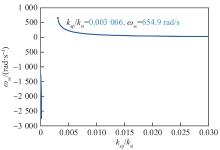
Fig.16
ω sc under different k sp/k si
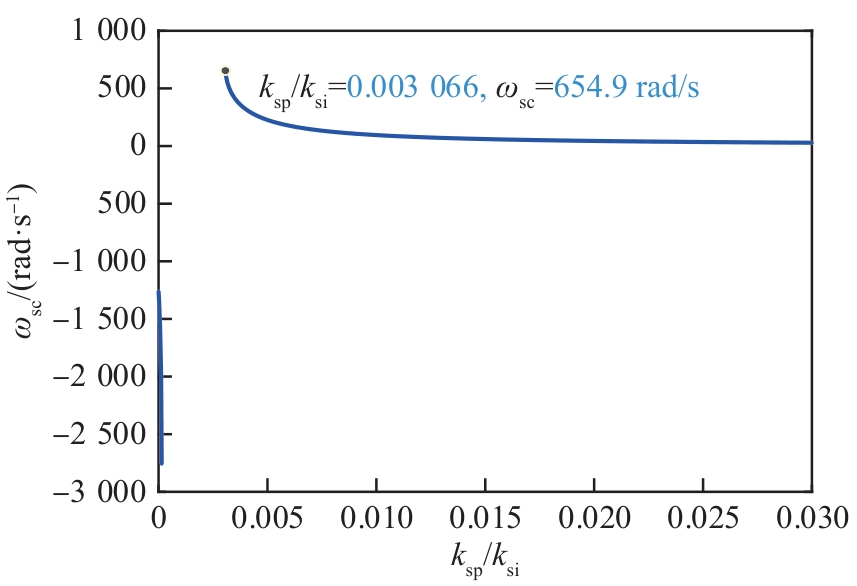

Fig.17
Frequency domain and time domain characteristic curves of calibrated speed loop
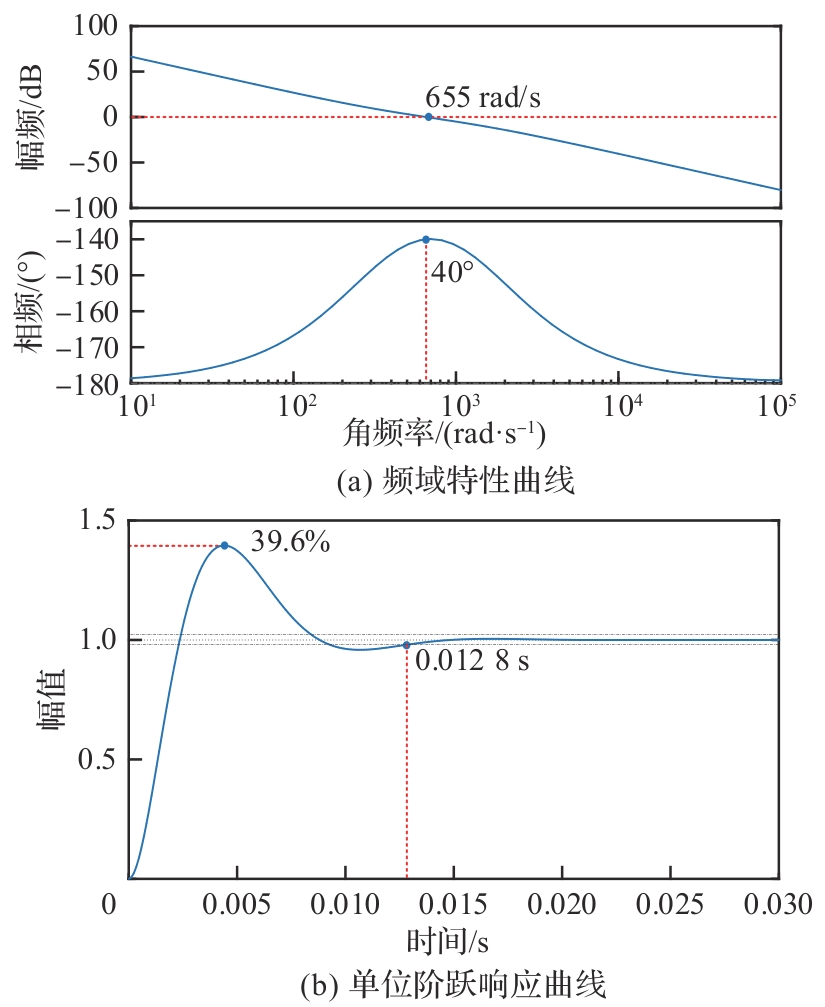
Fig.18
Position change and inner loop given
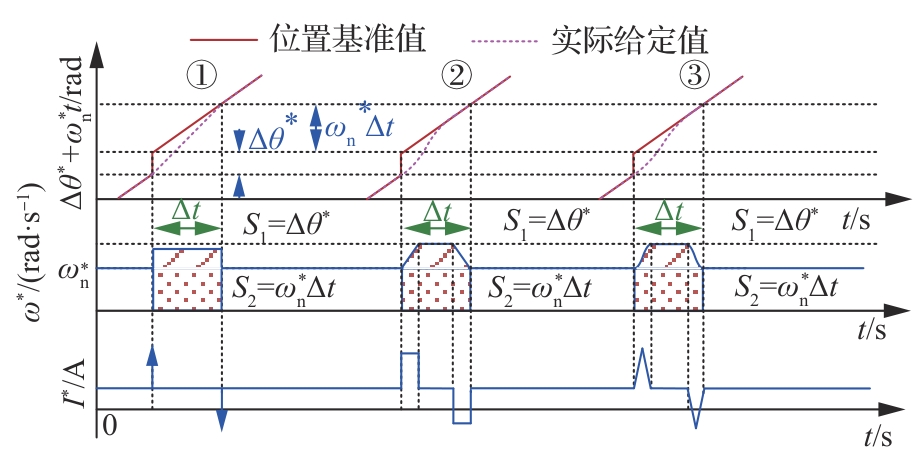
Fig.19
Speed reference ramp-up and ramp-down
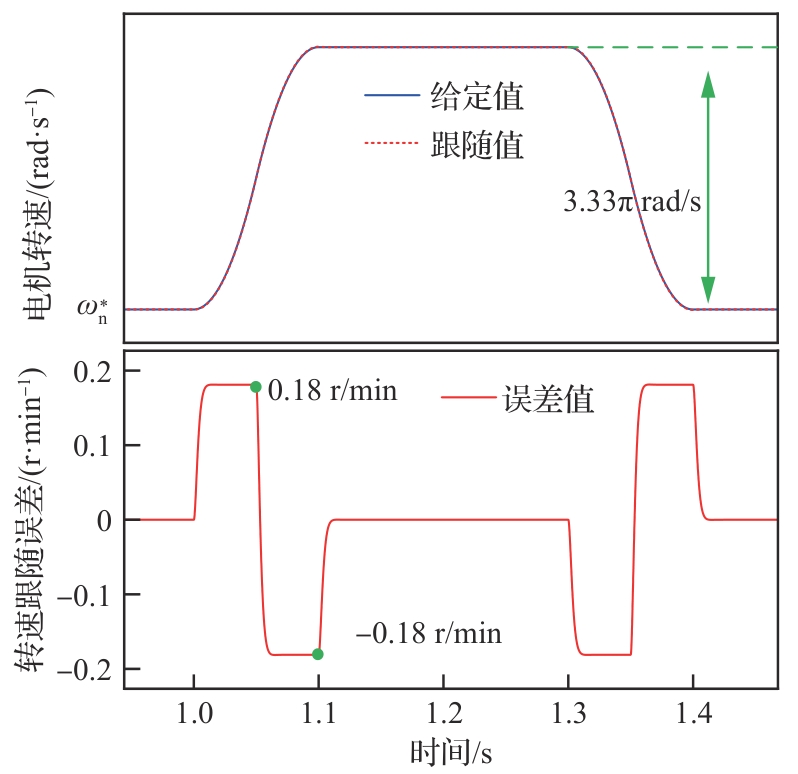
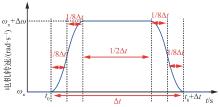
Fig.20
Motor speed path planning
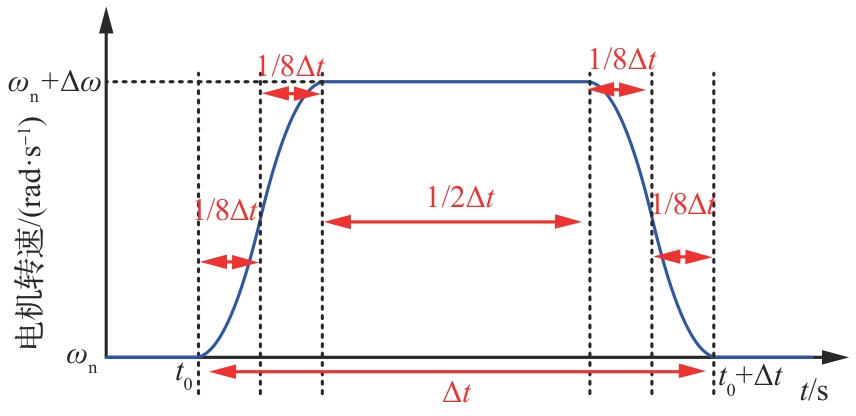
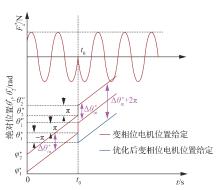
Fig.21
Position command for dual motors when the phase variation is π rad
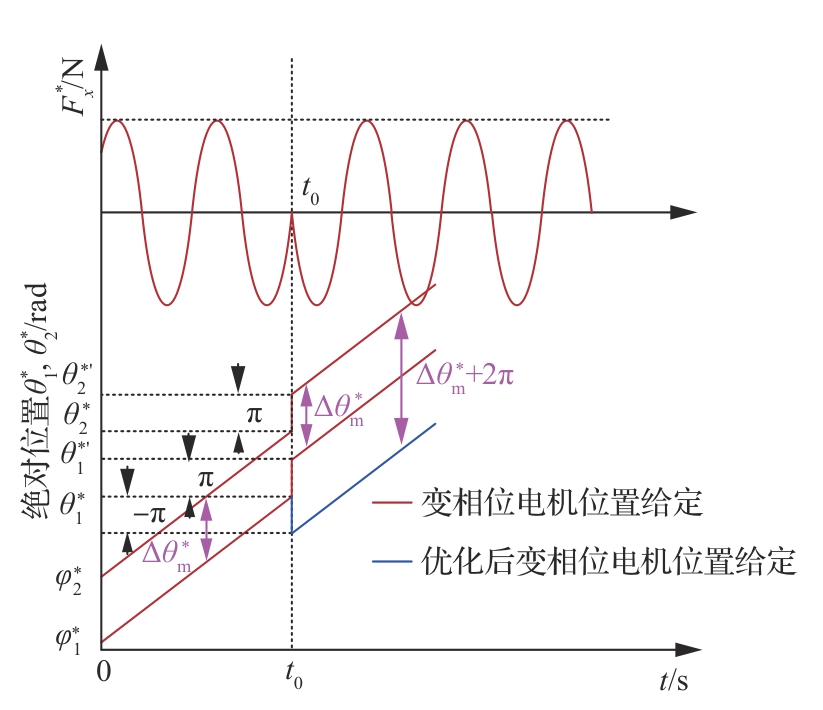
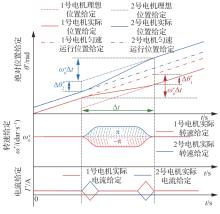
Fig.22
Loop command after dual-motor trajectory optimization
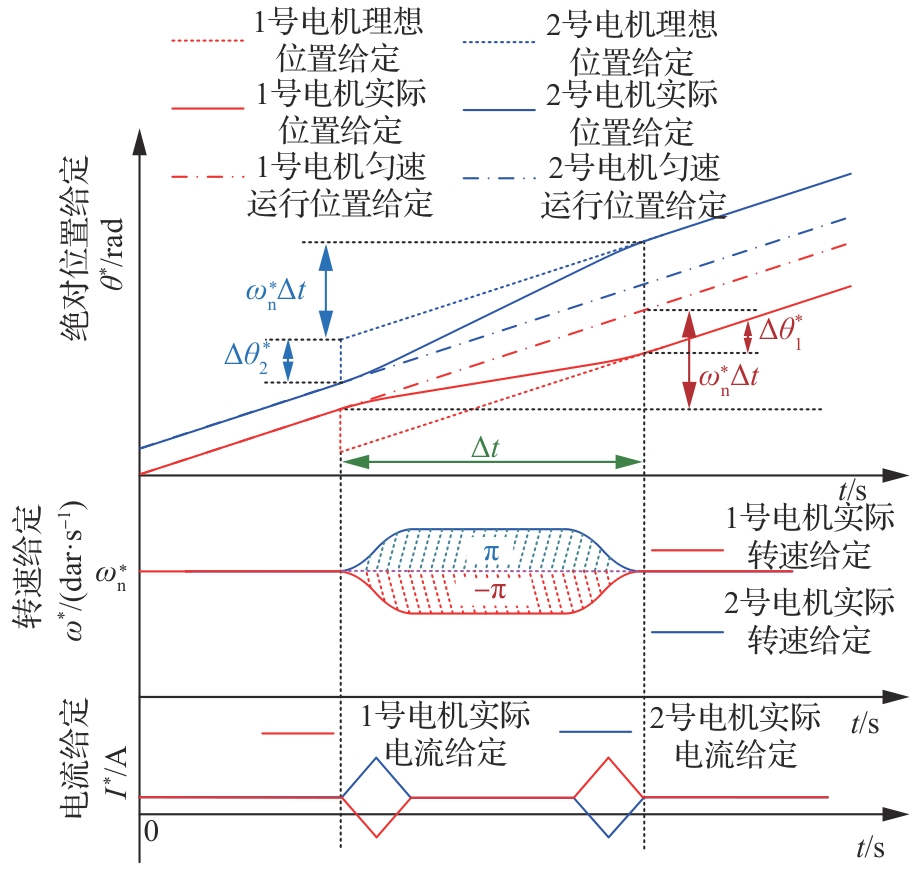
Fig.23
Output force performance test bench setup
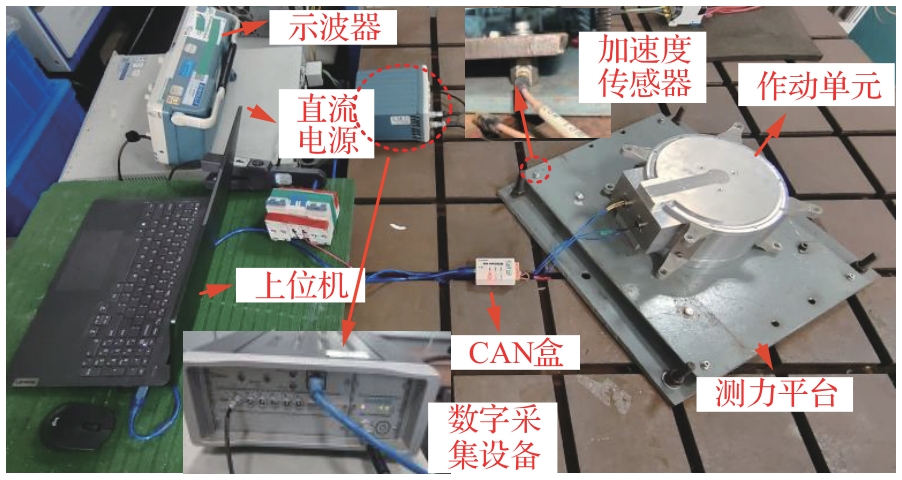
Fig.24
Angle difference of dual motors in an eccentric shaft configuration
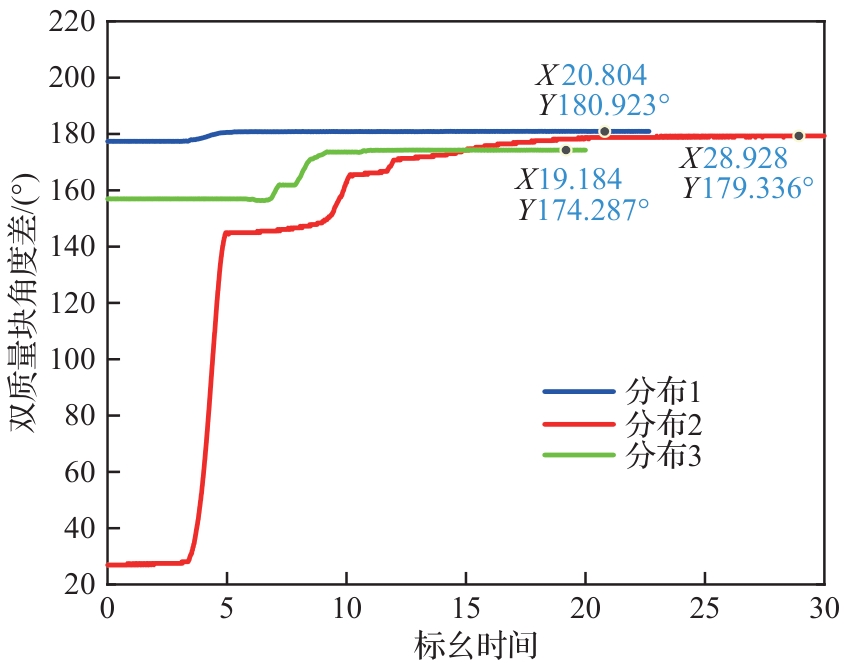
Fig.25
Maximum output force waveform at working frequency of 4
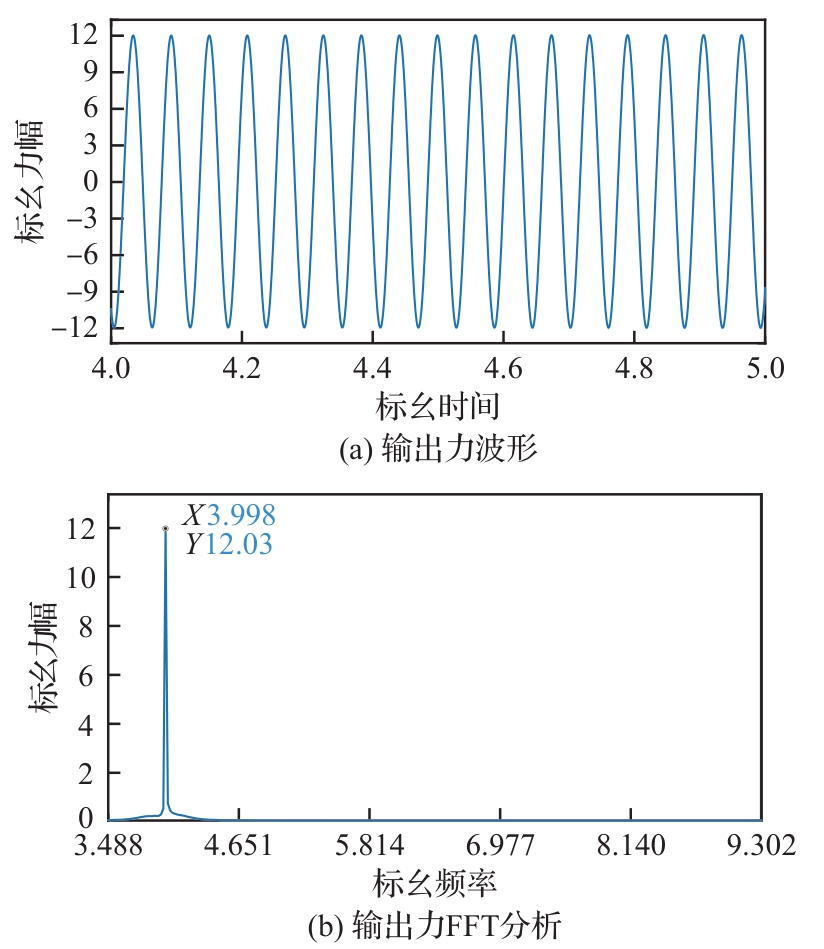
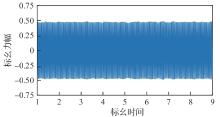
Fig.26
Waveform of minimum output force at operating frequency of 6
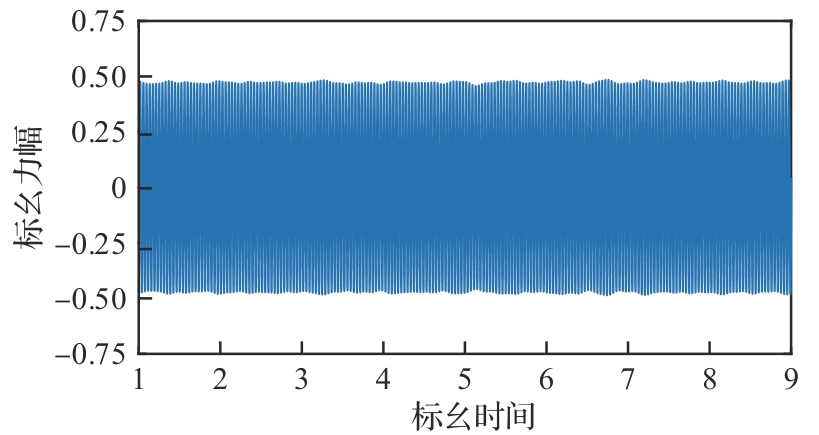

Fig.27
Waveform of output force during frequency-varying dynamic response
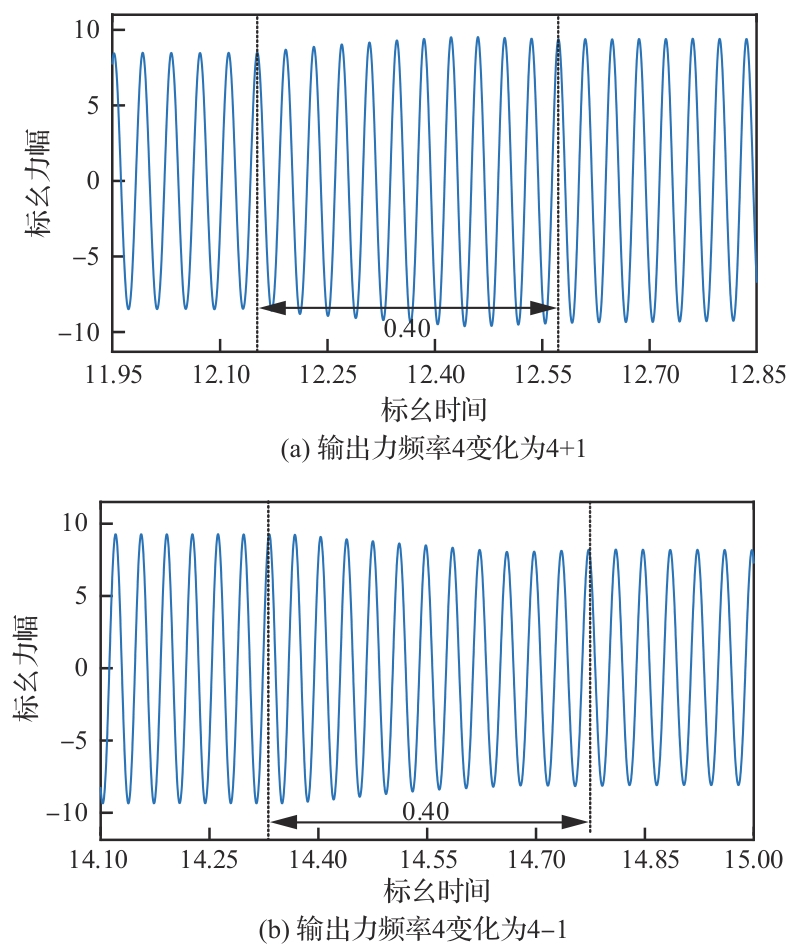
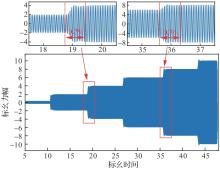
Fig.28
Dynamic response waveform of variable force amplitude at a working frequency of 4
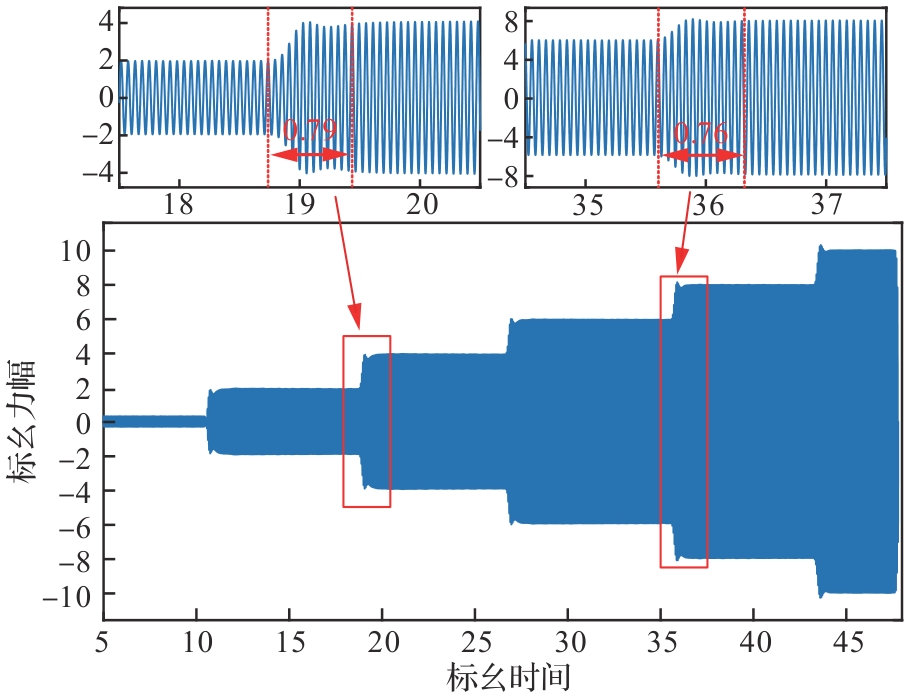
Table 5
Dynamic performance of actuator unit under variable force amplitudes
| 力幅变化 | 动态响应时间 | 稳态波动 | ||
|---|---|---|---|---|
| 频率为4 | 频率为6 | 频率为4 | 频率为6 | |
| 0~2 | 0.77 | 0.61 | ±0.100 | ±0.075 |
| 2~4 | 0.79 | 0.66 | ±0.023 | ±0.120 |
| 4~6 | 0.53 | 0.87 | ±0.016 | ±0.046 |
| 6~8 | 0.76 | 0.56 | ±0.016 | ±0.001 |
| 8~10 | 0.50 | 0.64 | ±0.023 | ±0.005 |

Fig.29
Phase change to 90° at frequency of 6
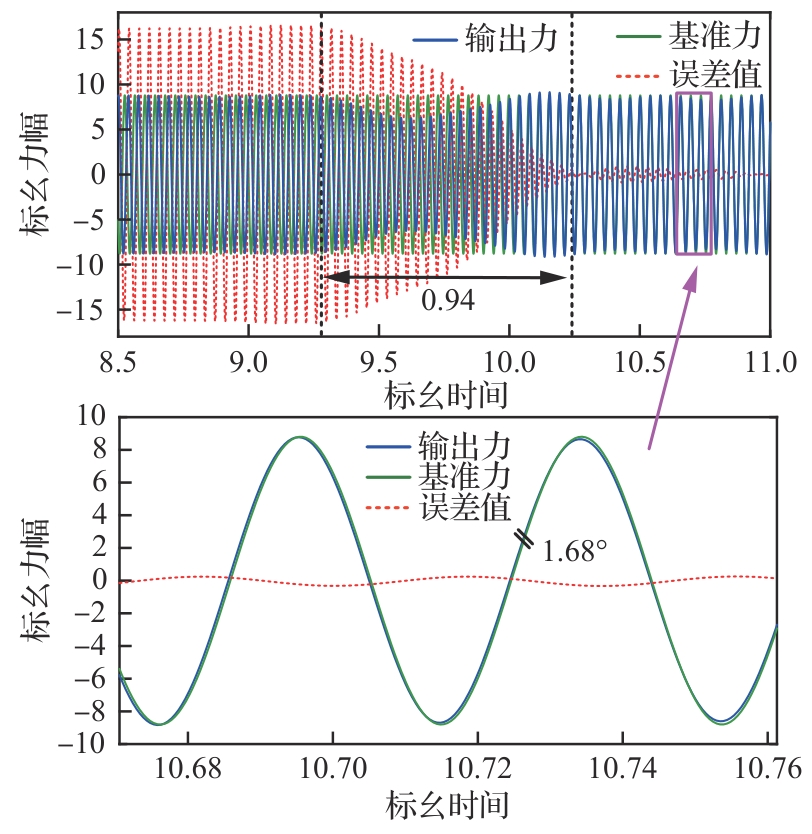

Fig.30
Minimum force start-stop output waveform
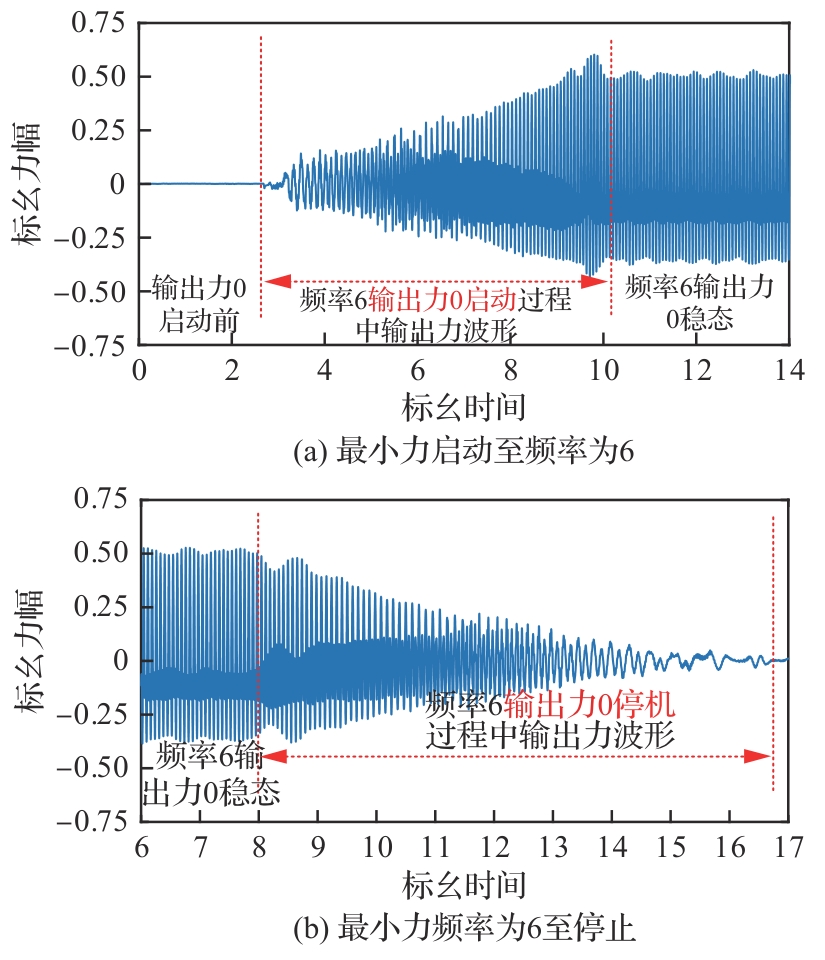
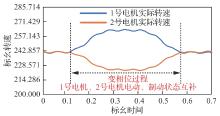
Fig.31
Speed waveforms of dual motors after trajectory optimization during dynamic process
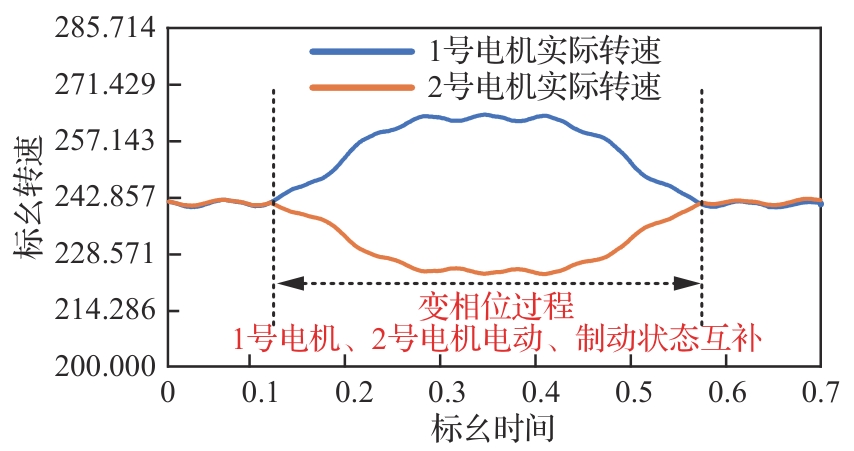
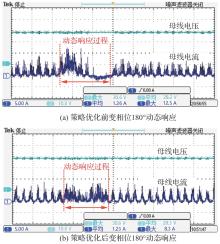
Fig.32
Bus voltage and current during dynamic response process before and after policy optimization
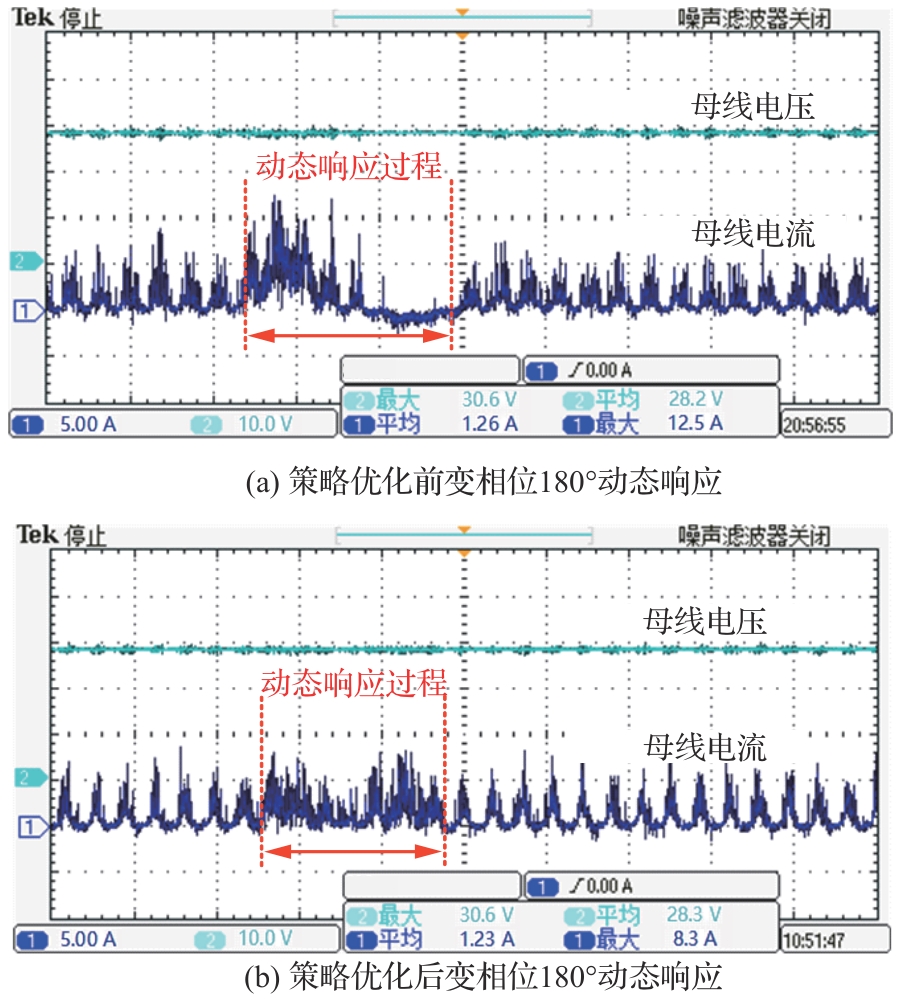

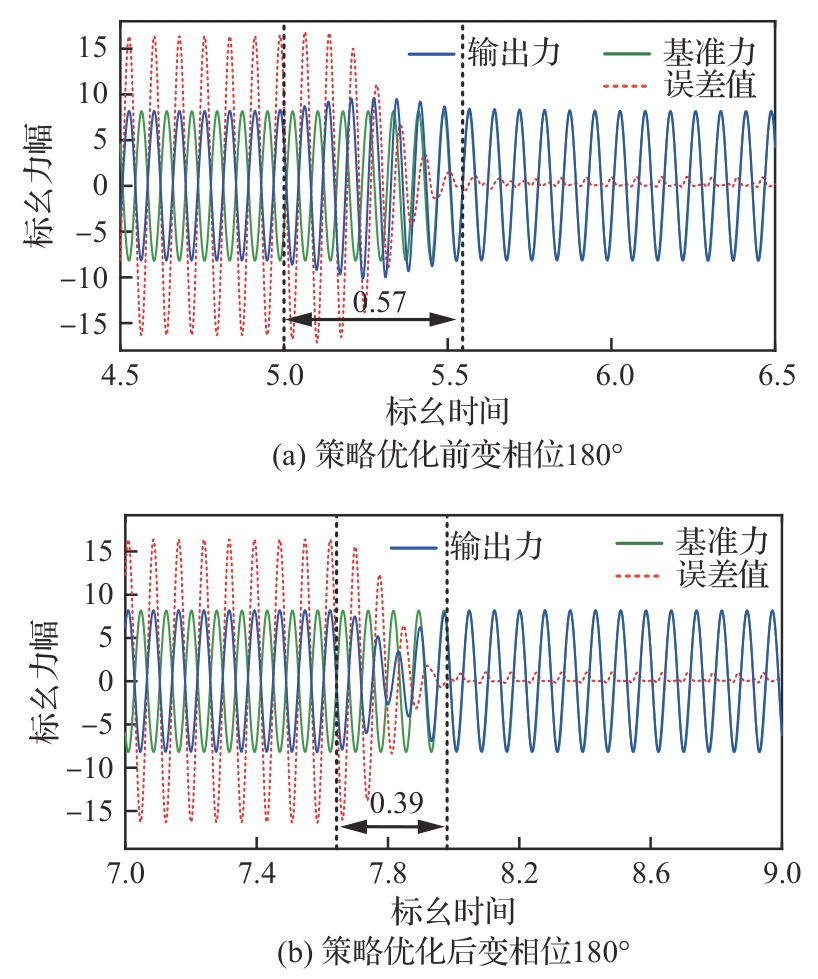
Fig.33
Force waveform of dynamic response with phase change before and after strategy optimization
| [1] |
王爽, 王开通, 曹金华, 等. 国外高速直升机的现状与发展趋势分析[J]. 航空科学技术, 2023, 34(12): 1-8.
|
|
|
|
| [2] |
梁昆, 王文涛. 基于坐标变换的直升机旋翼部件对机体异常振动影响的研究[J]. 装备制造技术, 2017(7): 57-59, 76.
|
|
|
|
| [3] |
|
| [4] |
航空航天工业部科学技术研究院. 直升机动力学手册[M]. 北京: 航空工业出版社, 1991: 4-34.
|
|
Science and Technology Research Institute of the Ministry of Aerospace Industry. Handbook of helicopter dynamics[M]. Beijing: Aviation Industry Press, 1991: 4-34 (in Chinese).
|
|
| [5] |
吴希明. 直升机动力学工程设计[M]. 北京: 航空工业出版社, 2017: 1-5.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
张鹏. 直升机桨毂顶置振动抑制器研究[D]. 南京: 南京航空航天大学, 2017: 36-52.
|
|
|
|
| [11] |
陈新华, 王华明, 高亚东. 用于旋翼桨毂主动式吸振器的控制算法[J]. 南京航空航天大学学报, 2017, 49(2): 195-199.
|
|
|
|
| [12] |
宋奎辉. 基于离心式作动器的旋翼桨毂振动抑制技术研究[D]. 南京: 南京航空航天大学, 2021: 28-62.
|
|
|
|
| [13] |
王昶天. 旋翼桨毂顶置振动抑制系统研究[D]. 南京: 南京航空航天大学, 2024: 10-82.
|
|
|
|
| [14] |
郝振洋, 张凤婷, 杨健, 等. 并行独立控制策略下消振电力作动器系统[J]. 航空学报, 2024, 45(13): 329573.
|
|
|
|
| [15] |
张呈林. 直升机部件设计[M]. 南京: 南京航空航天大学, 1986: 18-32.
|
|
|
|
| [16] |
陈新华. 旋翼桨毂主动式吸振器研究[D]. 南京: 南京航空航天大学, 2017: 9-11.
|
|
|
|
| [17] |
徐大伟. 关于向心球轴承摩擦系数及摩擦阻力矩的计算[J]. 机械, 1994(1): 13-16.
|
|
|
|
| [18] |
梅鲁海, 刘哲纬. 基于开环补偿与鲁棒控制的电液位置伺服加载系统研究[J]. 机电工程, 2022, 39(1): 59-64, 86.
|
|
|
|
| [19] |
葛凯华. 高精度转台用低速永磁同步电机伺服系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2022: 13-16.
|
|
|
|
| [20] |
易晨. 高带宽位置随动伺服系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2016: 9-13.
|
|
|
|
| [21] |
|
| [22] |
王磊. 基于速度给定曲线的步进电机控制方法的研究[D]. 包头: 内蒙古科技大学, 2021: 6-19.
|
|
|
| [1] | Guowang CHEN, Qian TANG, Liu HE. Fault diagnosis method of helicopter tail transmission systems based on graph domain generalization [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(7): 232642-232642. |
| [2] | Pinggen LUO, Bin LI, Huaji WANG, Xingping LI, Wenqing XIA. New waste heat recovery thermal management configurations and applications for helicopters [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(1): 632007-632007. |
| [3] | Zhen ZHANG, Jianfeng TAN, Jinglong ZHAO, Linhai CHEN, Yuze YAN, Changliang LIN. Rapid prediction method of bullet damage morphology of helicopter aluminum alloy fuselage [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(1): 232015-232015. |
| [4] | Ying WANG, Yang LI, Chaoqian CHENG, Zongxia JIAO. Thermal load analysis for aeroengine oil system with extended flight profile [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(1): 632005-632005. |
| [5] | Linbo WU, Shu MENG, Wei ZHANG, Jianfeng TAN. Parameters of rotor arrangement for sand suppression in helicopter near-earth flight [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(1): 632003-632003. |
| [6] | Tao ZHANG, Pan LI, Zixu WANG, Zhenhua ZHU. Design of reward functions for helicopter attitude control in reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732184-732184. |
| [7] | Jianfeng TAN, Yuze YAN, Weiguo ZHANG, Yakui LIU, Tianshuang SHAO. Analysis method of helicopter blade erosion in brownout condition [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 431012-431012. |
| [8] | Weizhen CHENG, Zefeng WANG, Lisong GENG, Jiahong ZHENG, Shuaike JIAO, Kang LI. Flight test measurement for structural load of rotor blade based on fiber Bragg grating [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 231863-231863. |
| [9] | Yong LIANG, Weiguo ZHANG, Binghui CHE, Honggang YUAN, Chunhua WEI, Ningmeng YANG. Wind tunnel tests of aeroacoustic characteristic for helicopter aircraft model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 132072-132072. |
| [10] | Luofeng WANG, Renliang CHEN, Rui FENG. Cross-medium rigid-flexible coupled modeling and trim analysis of helicopter mine-clearing system [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 231900-231900. |
| [11] | Xiaohua HAN, Wei HAN, Shimeng LU, Na LI, Fang GUO, Bing WAN, Xichao SU. Mission planning for ship-helicopter group wave launch and recovery oriented to mission time windows [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531773-531773. |
| [12] | Jinghan WEN, Honglei JI, Haoxuan DENG, Chang WANG. Rotor vortex ring state inflow model suitable for flight mechanics analysis [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 131395-131395. |
| [13] | Peikang ZHANG, Jifeng GUO, Peng YAN. Modeling and robust flight control of small-scale unmanned helicopter [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730797-730797. |
| [14] | Xiaolong ZHANG, Rong LI, Gaowei YAN, Shuyi XIAO, Guoqing LI. Fault estimation and fault tolerant control for small unmanned helicopters [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730802-730802. |
| [15] | Bo LI, Xiao WANG. Dynamic modeling and modal analysis of coaxial rotors/auxiliary propeller/drive train coupled system [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 528945-528945. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341