Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (17): 331637.doi: 10.7527/S1000-6893.2024.31637
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Xiangsong HUANG1,2, Mengyu WANG1, Dapeng PAN1,2( )
)
Received:2024-12-09
Revised:2025-01-10
Accepted:2025-03-18
Online:2025-04-15
Published:2025-04-07
Contact:
Dapeng PAN
E-mail:pandapeng@hrbeu.edu.cn
Supported by:CLC Number:
Xiangsong HUANG, Mengyu WANG, Dapeng PAN. Adversarial reinforcement learning-based UAV escape path planning method[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331637.
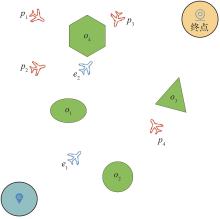
Fig.1
Drone escape air combat scenario
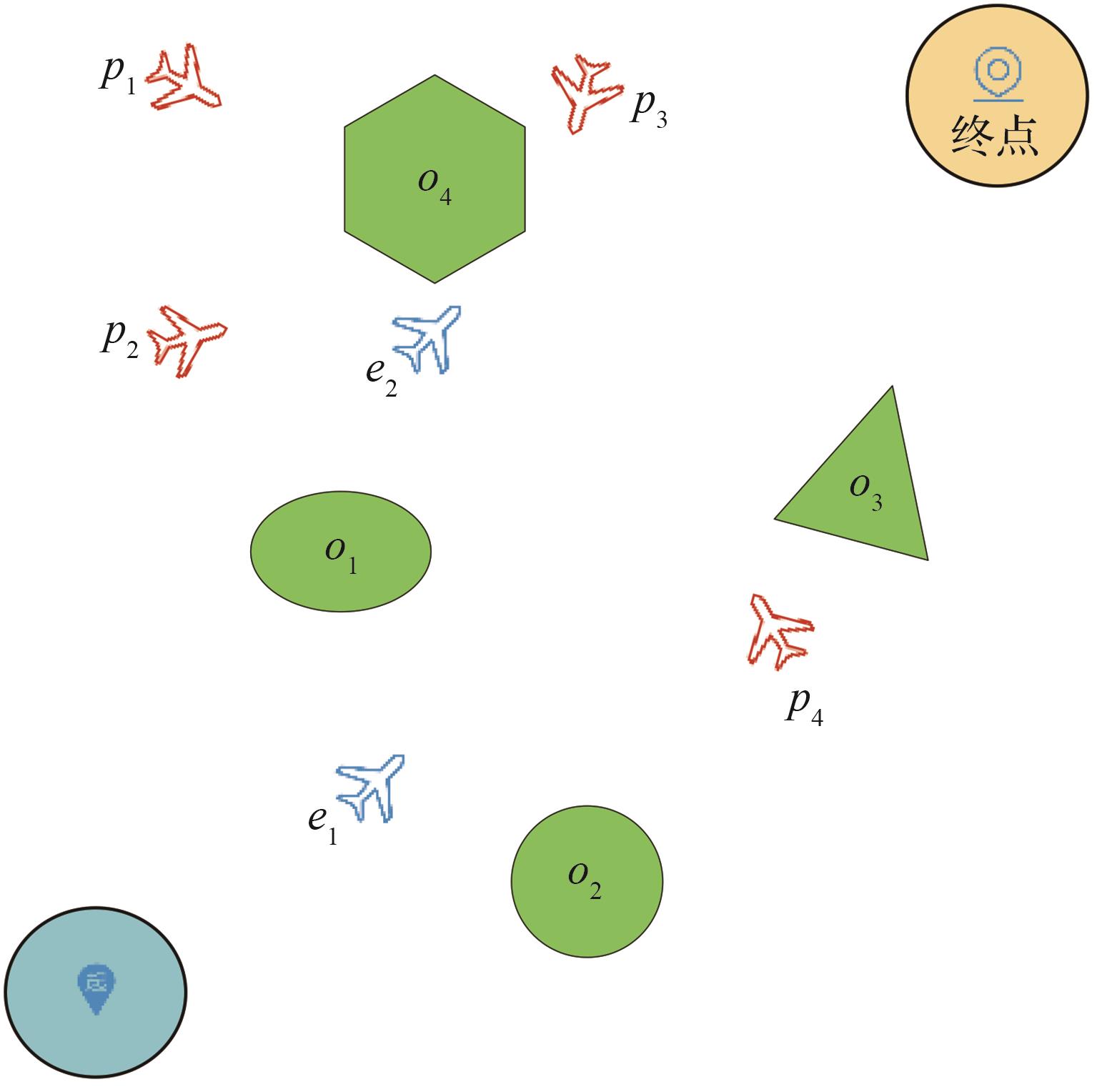
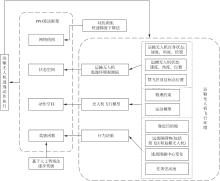
Fig.2
Block diagram of drone escape path planning method
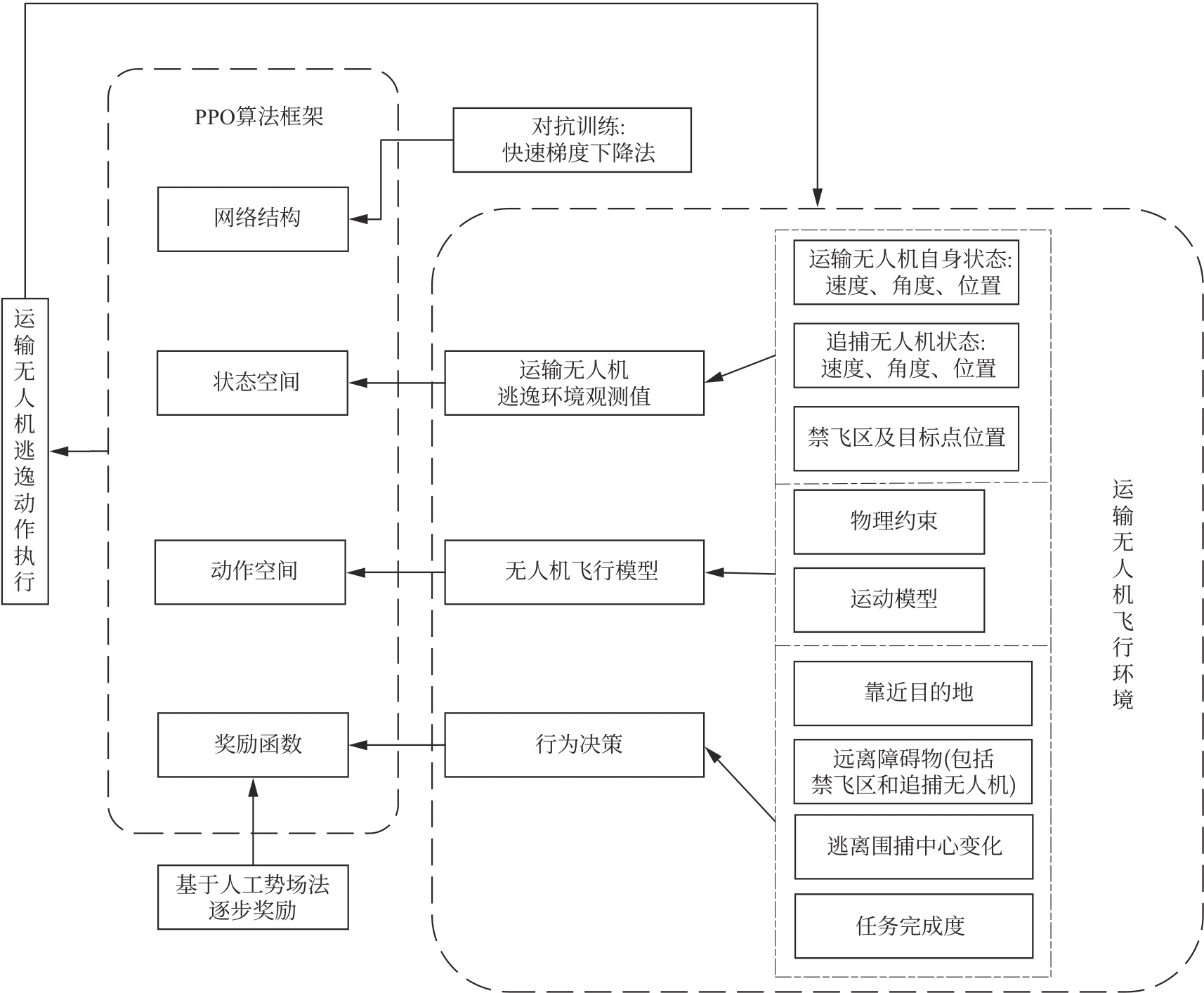

Fig.3
Flow chart of cargo crone escape algorithm based on ADR-PPO agorithm
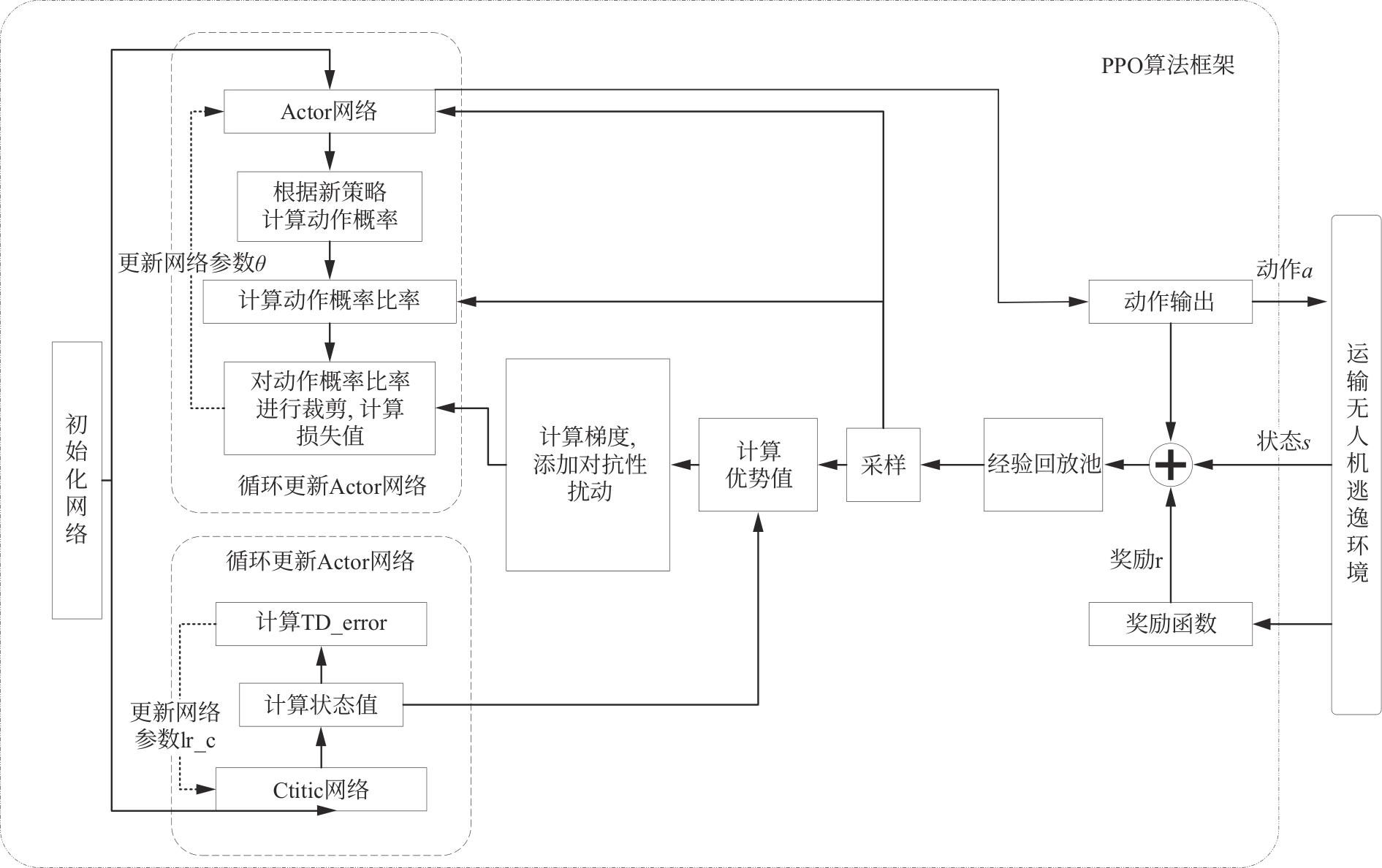

Fig.4
Multi-drone surrounding and capturing situation
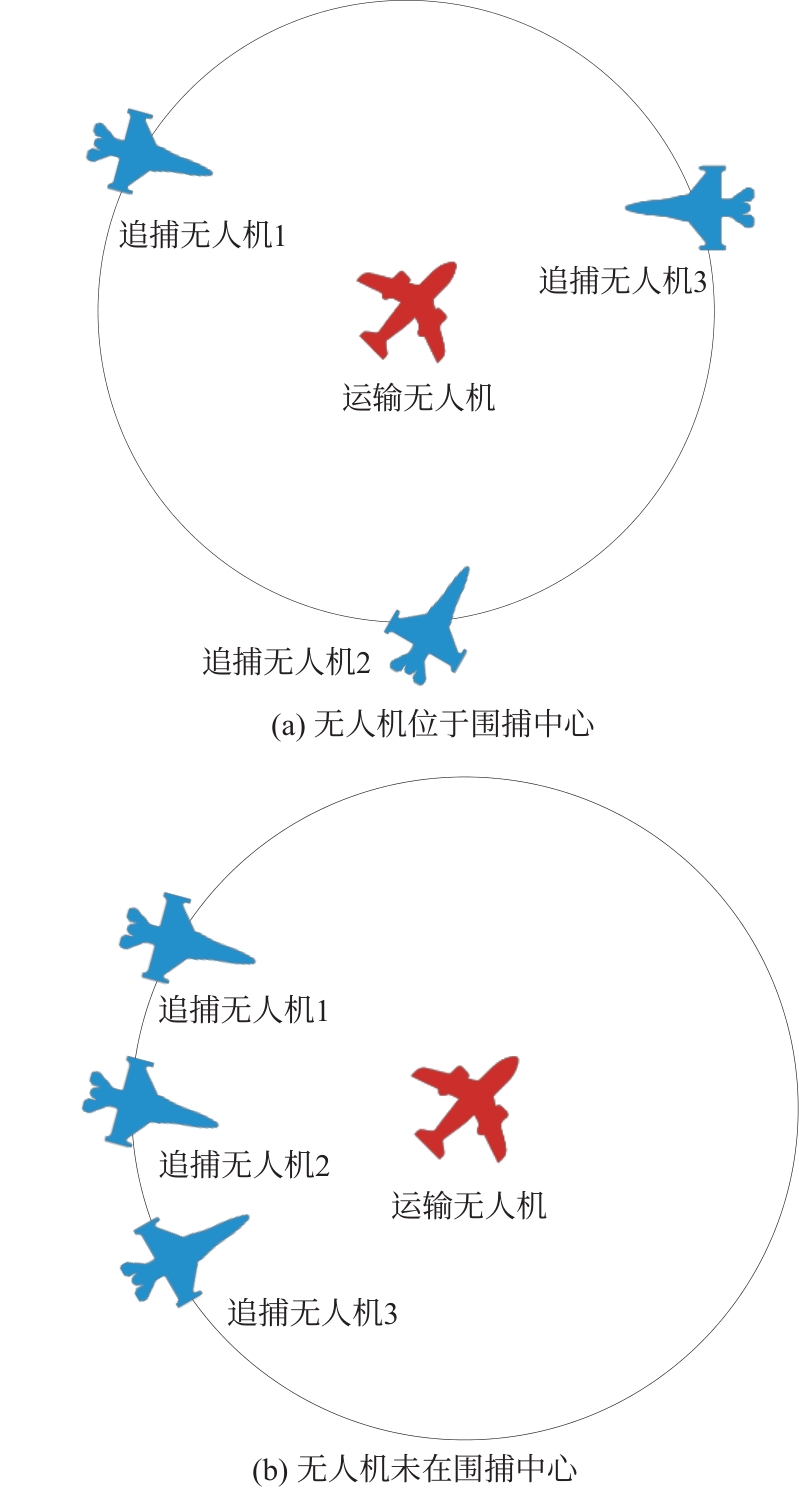
Table 1
Reinforcement learning parameter
| 参数 | 含义 | 数值 |
|---|---|---|
| γ | 奖励折扣因子 | 0.99 |
| α | 神经网络学习率 | 0.003 |
| ε | 剪切参数 | 0.2 |
| lr_c | 价值网络参数 | 0.003 |
| λ | GAE | 0.95 |
| Nmax_episode_steps | 单回合最大时间步数 | 1 000 |
| T/s | 时间步长 | 0.5 |
| Nbatch_size | 批次大小(Mini-batch) | 2 048 |
Table 2
Reward function parameter
| 参数 | 数值 |
|---|---|
| 1 | |
| 1 | |
| 1 | |
| 200 | |
| 100 | |
| 0.3 | |
| 0.1 |
Table 3
Cargo drone performance
| 参数 | 含义 | 数值 |
|---|---|---|
| m | 运输无人机数量 | 1 |
| 运输最小速度 | 50 | |
| 运输最大速度 | 100 | |
| 运输无人机最大航偏角 | 45 | |
| 感知范围 | 10 | |
| 运输无人机最大加速度 | 7 | |
| 运输无人机最大角速度 | 7 |
Table 4
Pursuit drone performance
| 参数 | 含义 | 数值 |
|---|---|---|
| n | 追捕无人机数量 | 3 |
| 追捕最小速度 | 50 | |
| 追捕最大速度 | 110 | |
| 追捕无人机最大航偏角 | 25 | |
| 攻击范围 | 100 | |
| 追捕无人机最大加速度 | 7 | |
| 追捕无人机最大角速度 | 7 |
Table 5
Drone escape training results
| 算法 | 平滑度 | 奖励函数最大值 | 运行时间/h |
|---|---|---|---|
| DQN | 4.06 | 2.57 | 1.38 |
| PPO | 3.78 | 3.02 | 0.57 |
| R-DQN | 4.32 | 3.67 | 2.99 |
| R-PPO | 4.53 | 4.47 | 3.22 |
| ADR-PPO | 4.64 | 4.49 | 3.42 |
Fig.5
Reward function curves in training process
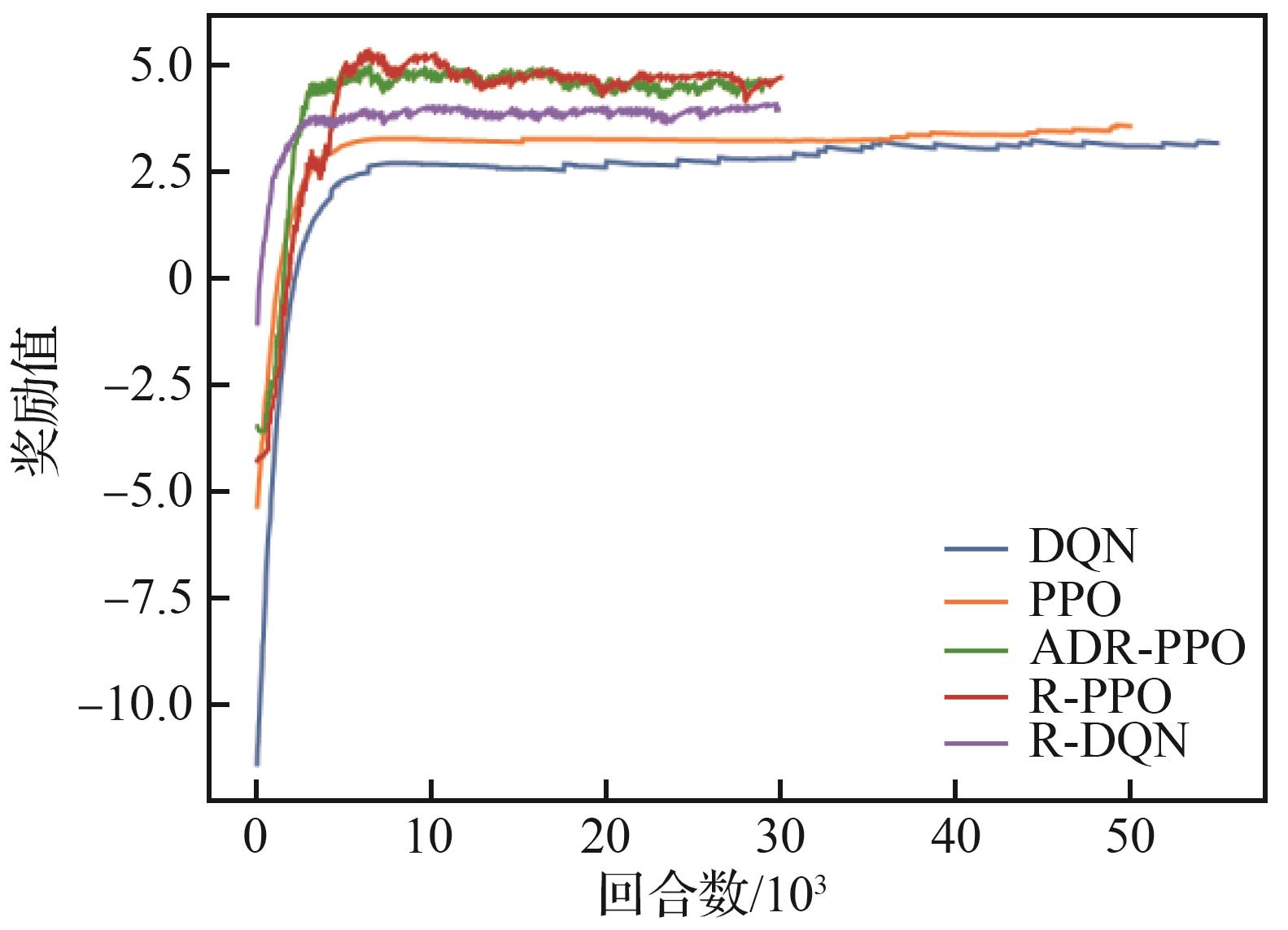
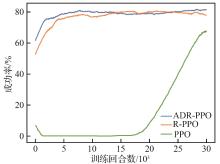
Fig.6
Success rate curves in training process
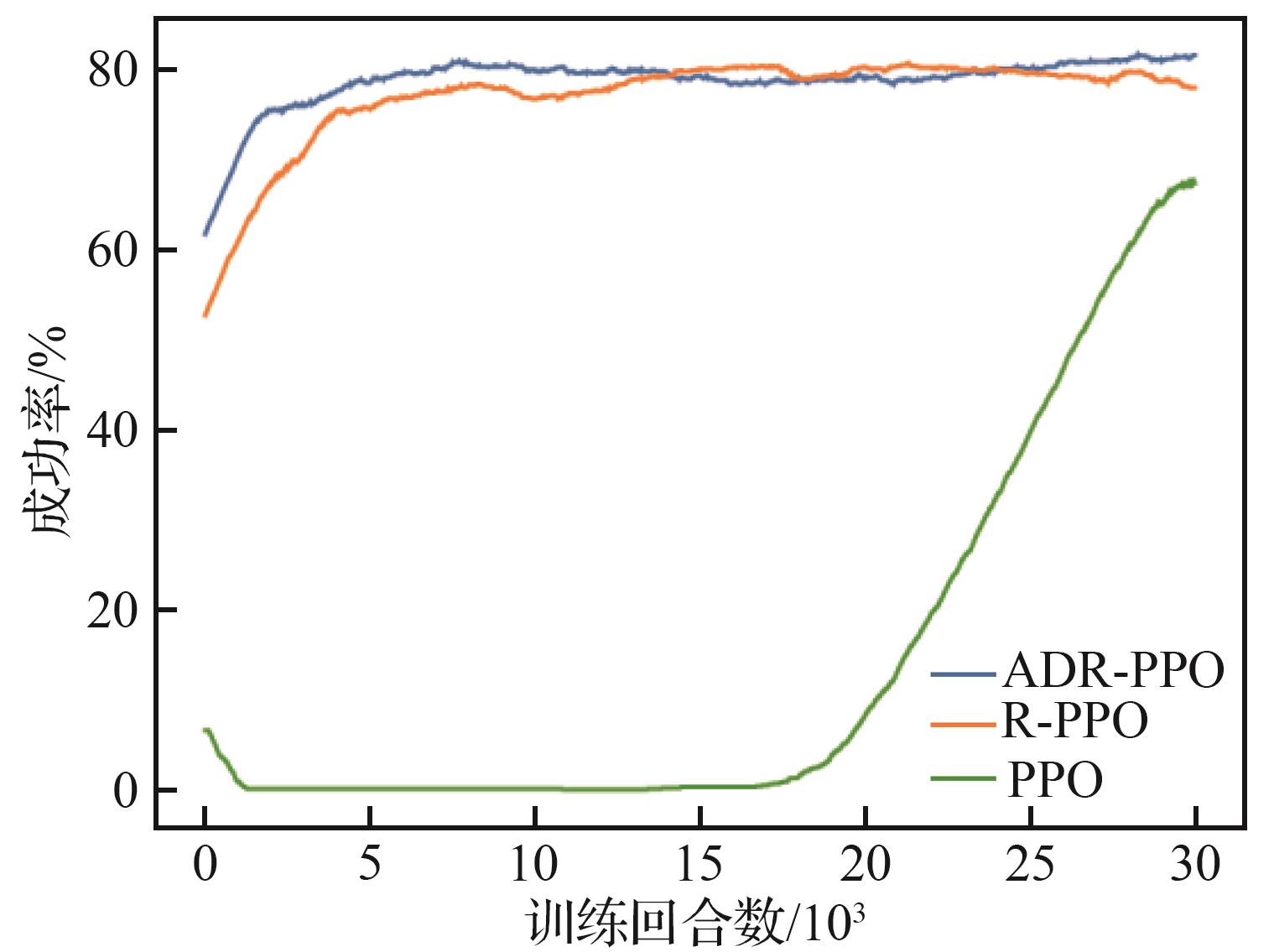
Table 6
Test results
| 场景 | 算法 | 成功率/% | 运输成功时平均飞行时间/s |
|---|---|---|---|
| 无干扰 | DQN | 51.7 | 355.98 |
| PPO | 69.5 | 292.54 | |
| R-PPO | 81.0 | 176.87 | |
| ADR-PPO | 81.2 | 173.25 | |
| 有干扰 | DQN | 36.9 | 392.81 |
| PPO | 51.4 | 328.44 | |
| R-PPO | 66.7 | 178.01 | |
| ADR-PPO | 79.4 | 175.62 |
Fig.7
Test reward function values of algorithm in disturbed scene

Fig.8
Test escape path result of DQN algorithm in undisturbed scene
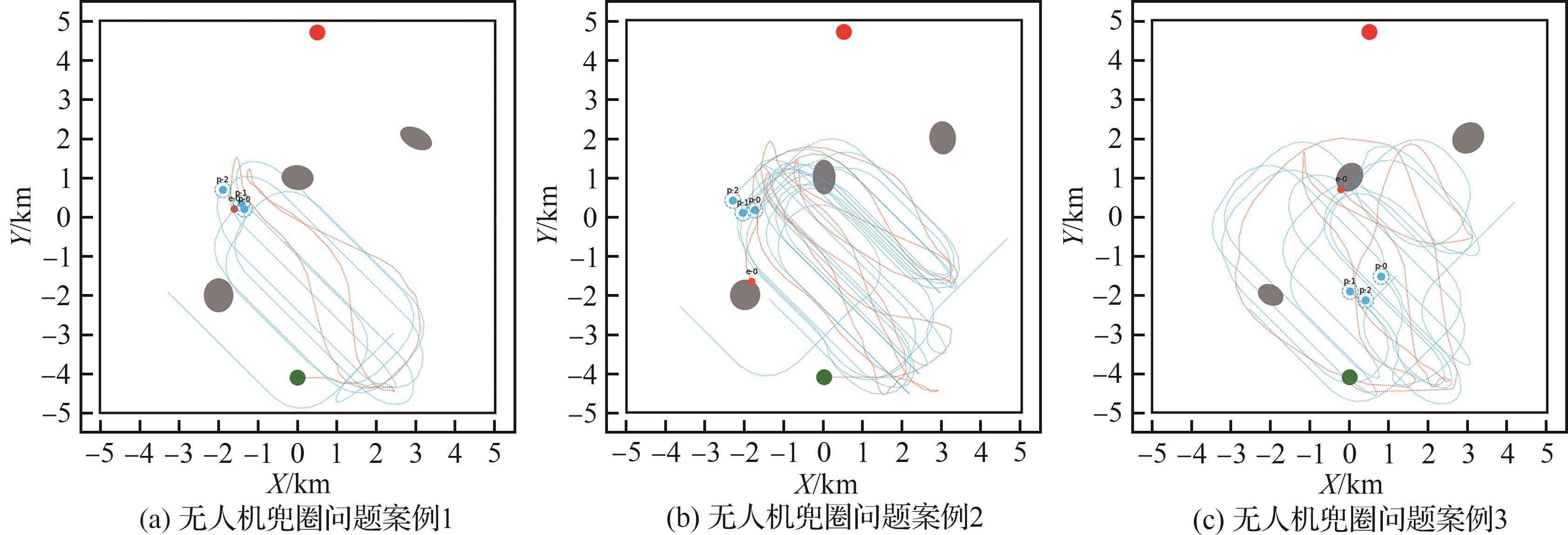

Fig.9
Escape path result diagram of R-PPO algorithm in disturbed test scene.
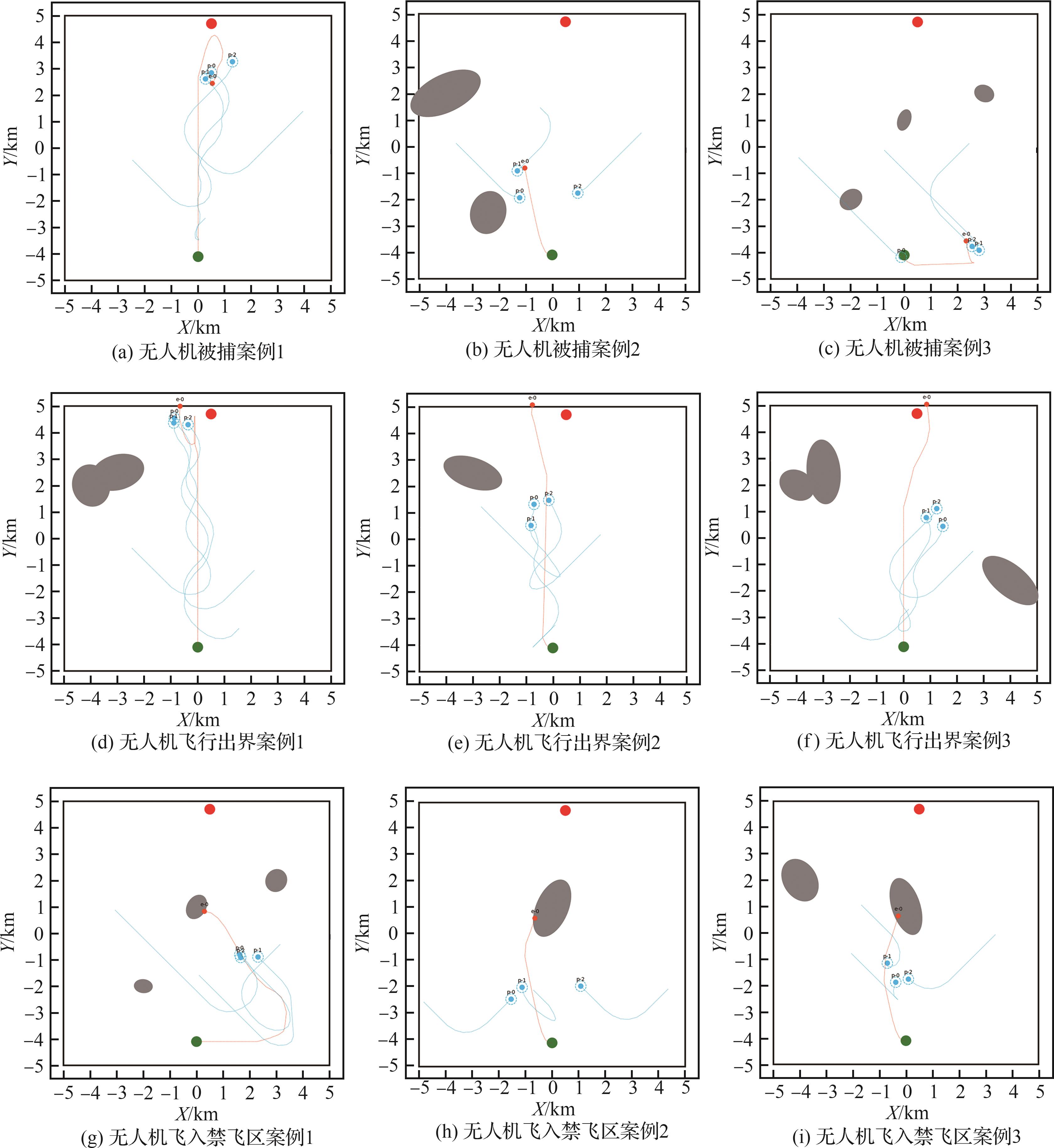

Fig.10
Test escape path result of ADR-PPO algorithm in disturbed scene
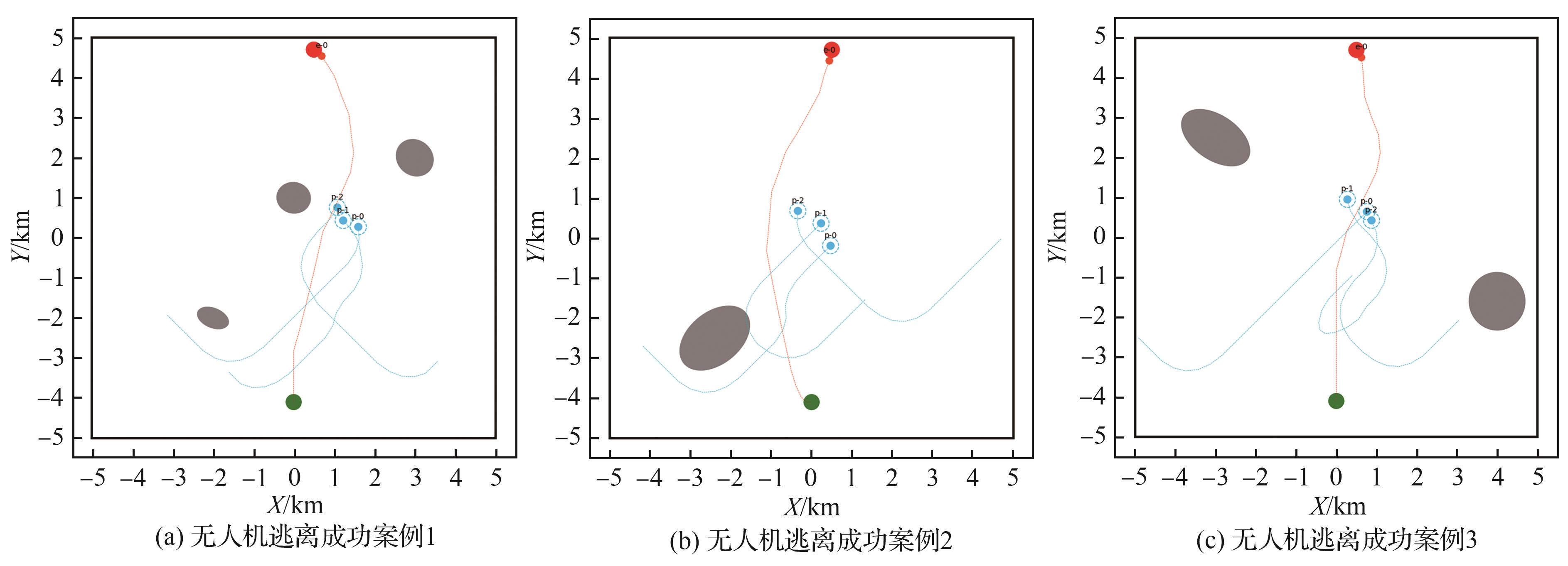

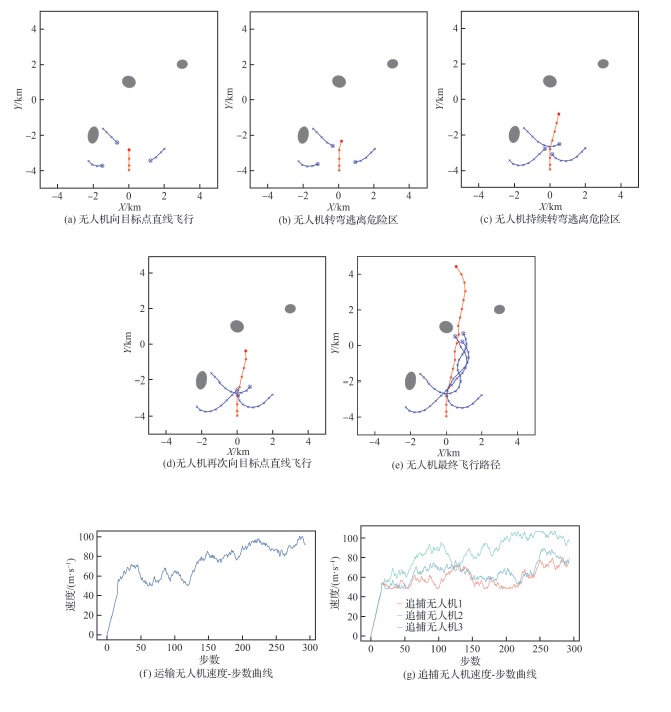
Fig.11
Test escape path process of ADR-PPO algorithm in disturbed scene
| [1] | CHEN B X. Research on AI application in the field of quadcopter UAVs[C]∥2020 IEEE 2nd International Conference on Civil Aviation Safety and Information Technology. Piscataway: IEEE, 2020: 569-571. |
| [2] | LI B, GAN Z G, CHEN D Q, et al. UAV maneuvering target tracking in uncertain environments based on deep reinforcement learning and meta-learning[J]. Remote Sensing, 2020, 12(22): 3789. |
| [3] | LI B, SONG C, BAI S X, et al. Multi-UAV trajectory planning during cooperative tracking based on a fusion algorithm integrating MPC and standoff[J]. Drones, 2023, 7(3): 196. |
| [4] | 范之琳, 杨洪勇, 韩艺琳. 基于强化学习的多智能体系统目标围捕控制[J]. 航空学报, 2023, 44(S1): 727487. |
| FAN Z L, YANG H Y, HAN Y L. Target hunting control of multi-agent system based on reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727487 (in Chinese). | |
| [5] | 郭华, 郭小和. 改进速度障碍法的无人机局部路径规划算法[J]. 航空学报, 2023, 44(11): 327586. |
| GUO H, GUO X H. Local path planning algorithm for UAV based on improved velocity obstacle method[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(11): 327586 (in Chinese). | |
| [6] | 赵江, 张璇, 池沛, 等. 空地无人集群自调节控制与动态路径规划方法[J]. 航空学报, 2024, 45(16): 329809. |
| ZHAO J, ZHANG X, CHI P, et al. Self-adaptive formation control and dynamic path planning for air-ground heterogeneous swarm[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 329809 (in Chinese). | |
| [7] | 黄湘松, 于日龙, 潘大鹏. 面向目标定位精度的主从式无人机编队航迹规划方法[J]. 电子学报, 2023, 51(9): 2289-2300. |
| HUANG X S, YU R L, PAN D P. Route planning method of master-slave UAV formation for target positioning accuracy[J]. Acta Electronica Sinica, 2023, 51(9): 2289-2300 (in Chinese). | |
| [8] | FAN X Y, LI H, CHEN Y, et al. A path-planning method for UAV swarm under multiple environmental threats[J]. Drones, 2024, 8(5): 171. |
| [9] | DONG Q X. Reinforcement learning based anti-UAV three-dimensional pursuit-evasion game for substation security[C]∥2024 5th International Conference on Mechatronics Technology and Intelligent Manufacturing (ICMTIM). Piscataway: IEEE Press, 2024: 224-227. |
| [10] | MA X H. Application of artificial intelligence in computer network technology[C]∥2023 2nd International Conference on Artificial Intelligence and Autonomous Robot Systems (AIARS). Piscataway: IEEE Press, 2023: 182-186. |
| [11] | YU F, ZHANG X, LI Q. Determination of the barrier in the qualitatively pursuit-evasion differential game[C]∥ 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC). Piscataway: IEEE Press, 2018: 1-6. |
| [12] | PAN Q, ZHOU D Y, HUANG J C, et al. Maneuver decision for cooperative close-range air combat based on state predicted influence diagram[C]∥2017 IEEE International Conference on Information and Automation (ICIA). Piscataway: IEEE Press, 2017: 726-731. |
| [13] | 傅莉, 谢福怀, 孟光磊, 等. 基于滚动时域的无人机空战决策专家系统[J]. 北京航空航天大学学报, 2015, 41(11): 1994-1999. |
| FU L, XIE F H, MENG G L, et al. An UAV air-combat decision expert system based on receding horizon control[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(11): 1994-1999 (in Chinese). | |
| [14] | 张耀中, 许佳林, 姚康佳, 等. 基于DDPG算法的无人机集群追击任务[J]. 航空学报, 2020, 41(10): 324000. |
| ZHANG Y, XU J, YAO K, et al. Pursuit missions for UAV swarms based on DDPG algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(10): 324000 (in Chinese). | |
| [15] | KOUZEGHAR M, SONG Y, MEGHJANI M, et al. Multi-target pursuit by a decentralized heterogeneous UAV swarm using deep multi-agent reinforcement learning[C]∥2023 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2023: 3289-3295. |
| [16] | 符小卫, 徐哲, 朱金冬, 等. 基于PER-MATD3的多无人机攻防对抗机动决策[J]. 航空学报, 2023, 44(7): 327083. |
| FU X W, XU Z, ZHU J D, et al. Maneuvering decision-making of multi-UAV attack-defence confrontation based on PER-MATD3[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(7): 327083 (in Chinese). | |
| [17] | XIONG H, ZHANG Y. Reinforcement learning-based formation-surrounding control for multiple quadrotor UAVs pursuit-evasion games[J]. ISA Transactions, 2024, 145: 205-224. |
| [18] | GUO Y, ZHANG N Z, JIANG H R, et al. Layered reinforcement learning design for safe flight control of UAV in urban environments[C]∥2023 International Annual Conference on Complex Systems and Intelligent Science (CSIS-IAC). Piscataway: IEEE Press, 2023: 673-678. |
| [19] | WANG J, XIAO Y, LI T S, et al. A jamming aware artificial potential field method to counter GPS jamming for unmanned surface ship path planning[J]. IEEE Systems Journal, 2023, 17(3): 4555-4566. |
| [20] | SHRIVASTAVA A, PFISTER T, TUZEL O, et al. Learning from simulated and unsupervised images through adversarial training[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2017: 2242-2251. |
| [21] | 杨振, 李琳, 柴仕元, 等. 面向多战术需求的无人机空战自主规避机动方法[J]. 航空学报, 2024, 45(20): 630629. |
| YANG Z, LI L, CHAI S Y, et al. Autonomous evasive maneuver method for unmanned combat aerial vehicle in air combat with multiple tactical requirements[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 630629 (in Chinese). | |
| [22] | CESA-BIANCHI N, CONCONI A, GENTILE C. On the generalization ability of on-line learning algorithms[J]. IEEE Transactions on Information Theory, 2004, 50(9): 2050-2057. |
| [1] | Kaifang WAN, Zhilin WU, Yunhui WU, Haozhi QIANG, Yibo WU, Bo LI. Cooperative location of multiple UAVs with deep reinforcement learning in GPS-denied environment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331024-331024. |
| [2] | Lingfeng JIANG, Xinkai LI, Hai ZHANG, Hanwei LI, Hongli ZHANG. Mapless navigation of UAVs in dynamic environments based on an improved TD3 algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331035-331035. |
| [3] | Min YANG, Guanjun LIU, Ziyuan ZHOU. Control of lunar landers based on secure reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630553-630553. |
| [4] | Yu WANG, Zhipeng XIE, Yongjian TIAN, Guanglei MENG. Distributed UAV formation control with virtual structure guided reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331354-331354. |
| [5] | Wei CHEN, Lulu LI, Dong CHEN, Shaohui ZHANG, Yafei LI, Ke WANG, Yuanyuan JIN, Mingliang XU. Multi-aircraft cooperative decision-making methods driven by differentiated support demands for carrier-based aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531274-531274. |
| [6] | Xudong CHEN, Qiqi CHEN, Yizhe LUO, Jiabao WANG, Mingliang XU. Dynamic parallel scheduling of heterogeneous carrier-based aircraft deck support operations [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531329-531329. |
| [7] | Zheng WANG, Hua WANG, Keke CUI, Chaochao LI, Junnan LIU, Mingliang XU. Locally guided reinforcement learning for autonomous dispatching of carrier-based aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531333-531333. |
| [8] | Wenhui LING, Chunhui MU, Lingcong NIE, Xian DU, Ximing SUN. Improved DDPG-based multipoint pressure distribution control of variable geometry scramjet combustor at wide range velocities [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 131092-131092. |
| [9] | Zijie YU, Zheng ZHENG, Qingdong LI, Lin GUO, Suping REN, Jian GUO. Trajectory planning for solar-powered UAVs based on deep reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 331420-331420. |
| [10] | Changxiao ZHAO, Yixuan SUN. A safe scheduling model for eVTOL avionics systems for airworthiness requirements [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531252-531252. |
| [11] | Shuyi GAO, Defu LIN, Duo ZHENG, Cheng XU. Intelligent maneuvering penetration guidance strategies for aerial vehicles considering interceptor detection capability limitations [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 331304-331304. |
| [12] | Guang LIU, Hua WANG, Youfang LIN, Shuo HE, Yafei LI, Mingliang XU. Adaptive batch matching decision method for carrier-based aircraft support operations [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 330615-330615. |
| [13] | Honglin ZHANG, Jianjun LUO, Weihua MA. Spacecraft game decision making for threat avoidance of space targets based on machine learning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(8): 329136-329136. |
| [14] | Yunpeng CAI, Dapeng ZHOU, Jiangchuan DING. Intelligent collaborative control of UAV swarms with collision avoidance safety constraints [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529683-529683. |
| [15] | Shengzhe SHAN, Weiwei ZHANG. Air combat intelligent decision-making method based on self-play and deep reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328723-328723. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341