Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (15): 528769.doi: 10.7527/S1000-6893.2023.28769
• Flight Mechanics and Guidance Control • Previous Articles Next Articles
Gang LEI, Wei LUO( ), Yunshu LI, Canhui LAI
), Yunshu LI, Canhui LAI
Received:2023-03-30
Revised:2023-04-27
Accepted:2023-05-16
Online:2023-08-15
Published:2023-05-18
Contact:
Wei LUO
E-mail:2237087676@qq.com
CLC Number:
Gang LEI, Wei LUO, Yunshu LI, Canhui LAI. Optimization of reentry maneuver trajectory for hypersonic glide vehicles in multiple no-fly zones[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528769.
Fig.1
Geometric search space
Fig.2
Heading angle change

Fig.3
Height-velocity corridor
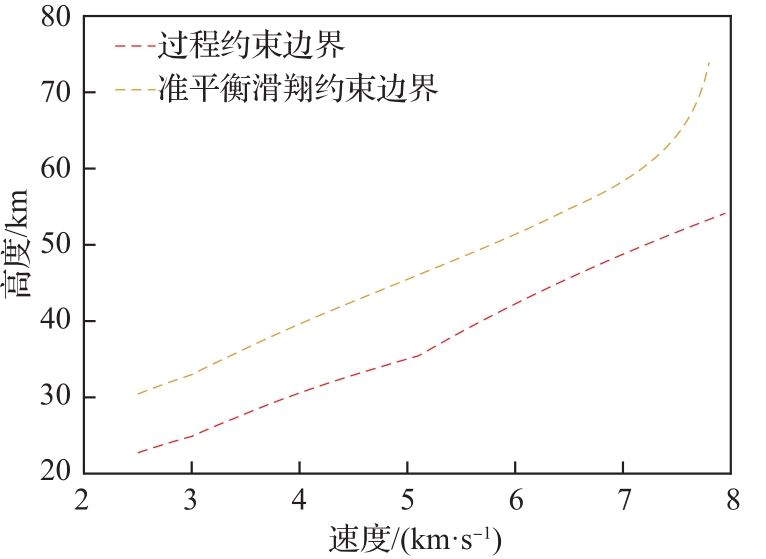
Fig.4
Bank angle-velocity corridor
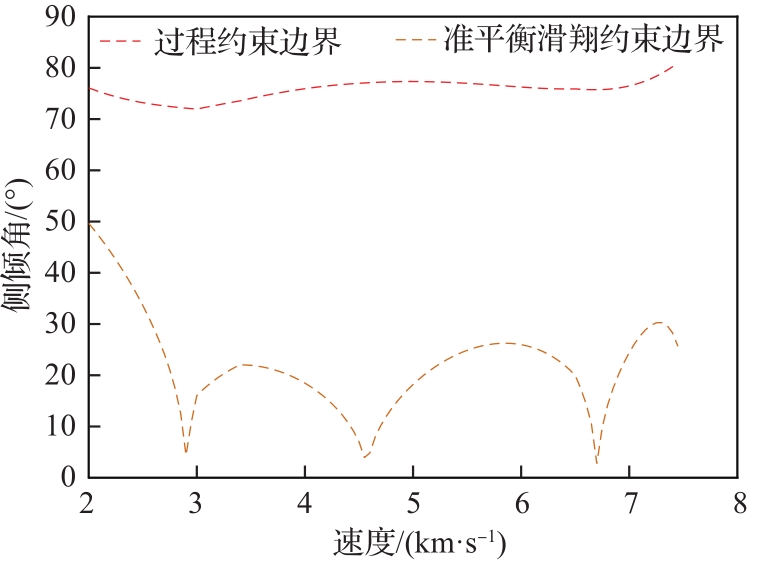
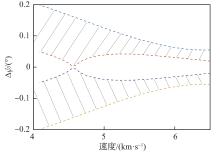
Fig.5
Heading angle-velocity corridor

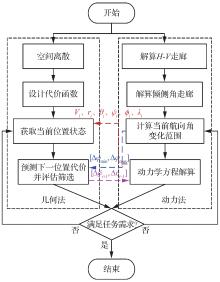
Fig.6
Geometric-dynamic method flow
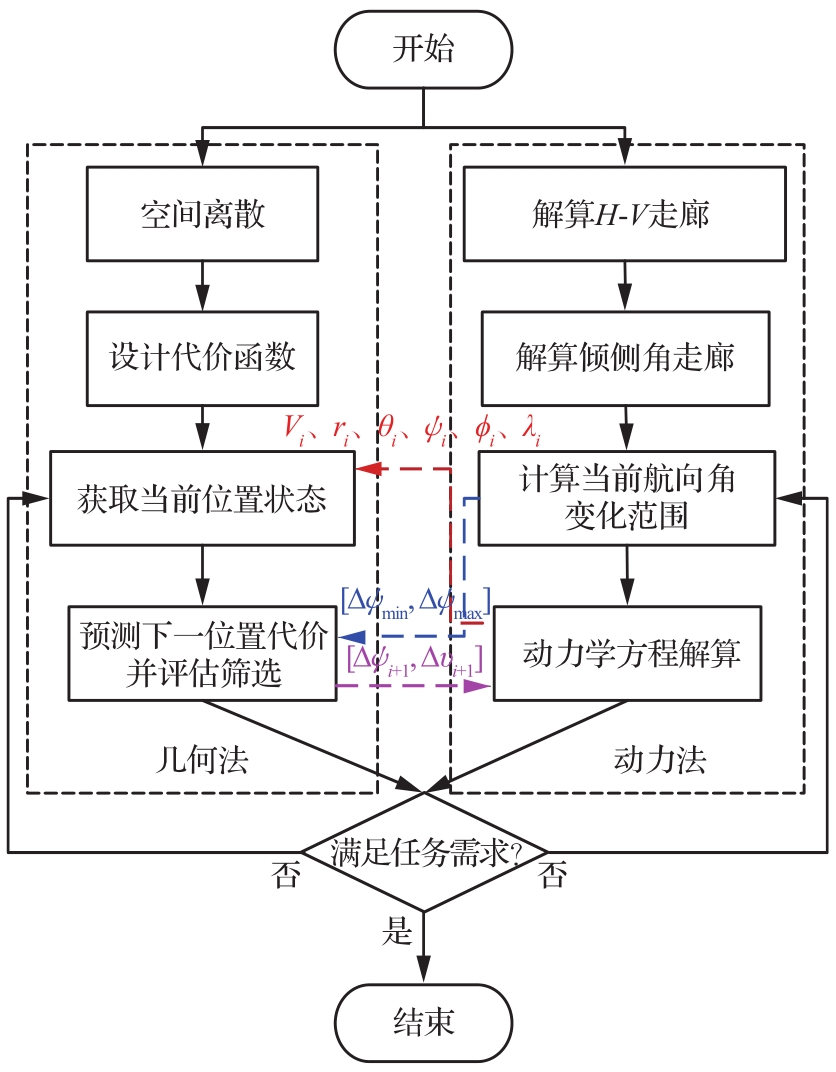
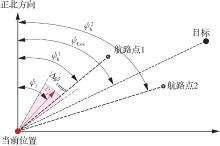
Fig.7
Angle-based spatial search
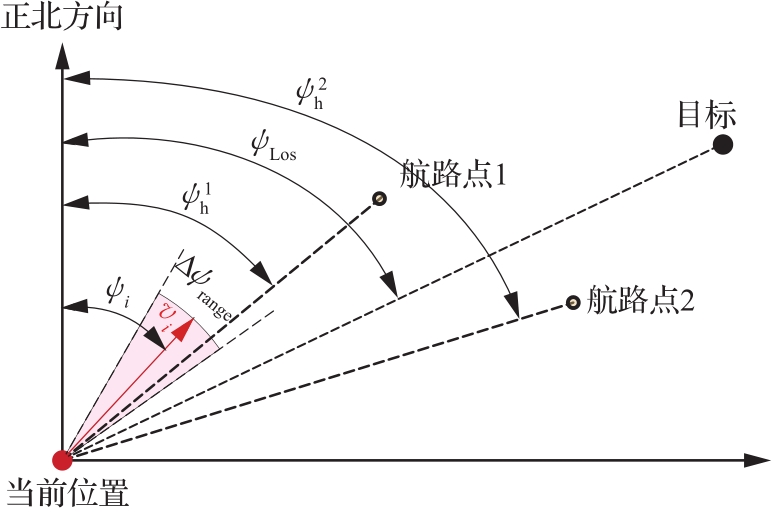

Fig.8
Change of trajectory and threat area
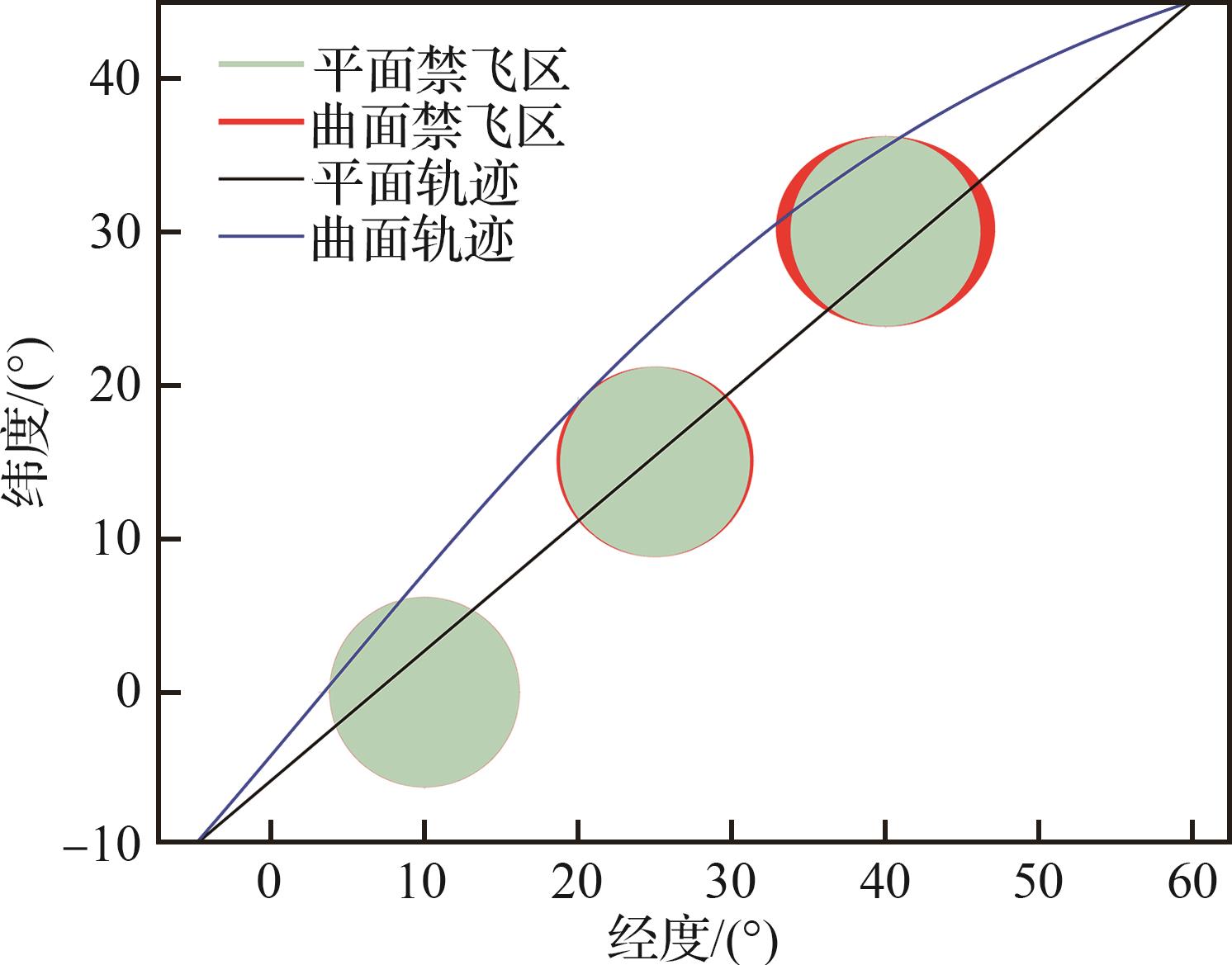
Fig.9
Waypoint generation based on surface

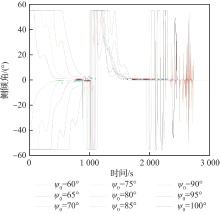
Fig.10
Difference of bank angle change
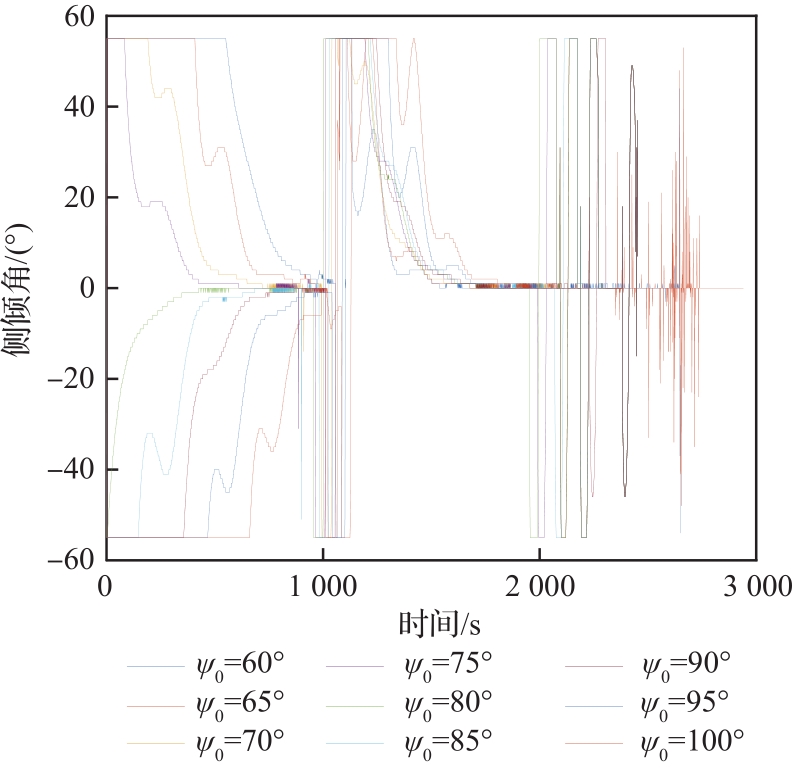
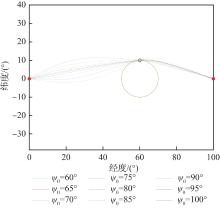
Fig.11
Difference of plane trajectory


Fig.12
Difference of residual energy change
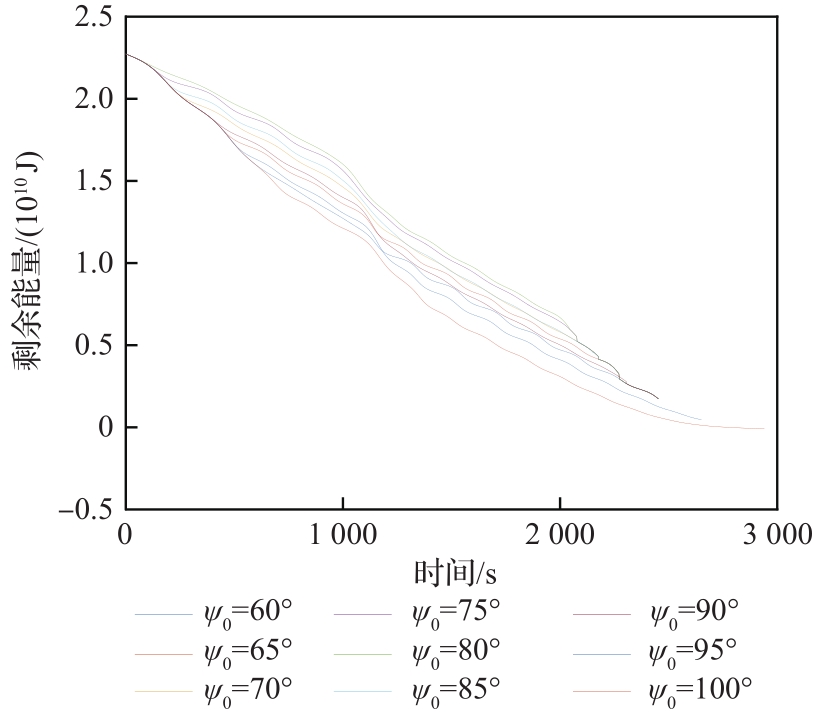

Fig.13
Deep search strategy


Fig.14
Improved waypoint generation strategy
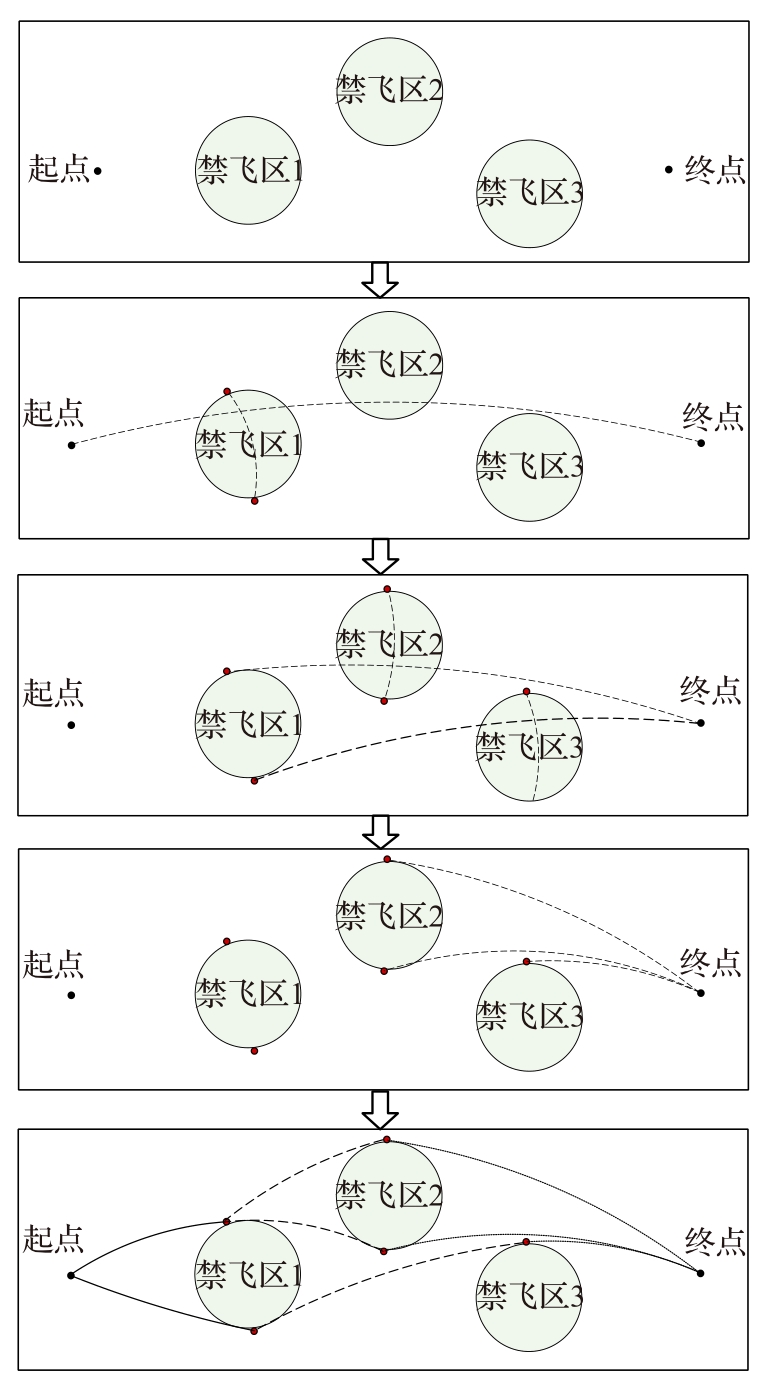
Table 1
Initial state
| 50.0 | 6 500.0 | 0.001 | 1.571 |
Table 2
Path constraint information
| 3 500.0 | 200.0 | 3.0 |
Table 3
Flight position information
| 点位 | 起点 | 航路点1 | 航路点2 | 终点 |
|---|---|---|---|---|
| 坐标/(°) | (0,0) | (8,11) | (15,22) | (20,25) |

Fig.15
Space trajectory comparison results
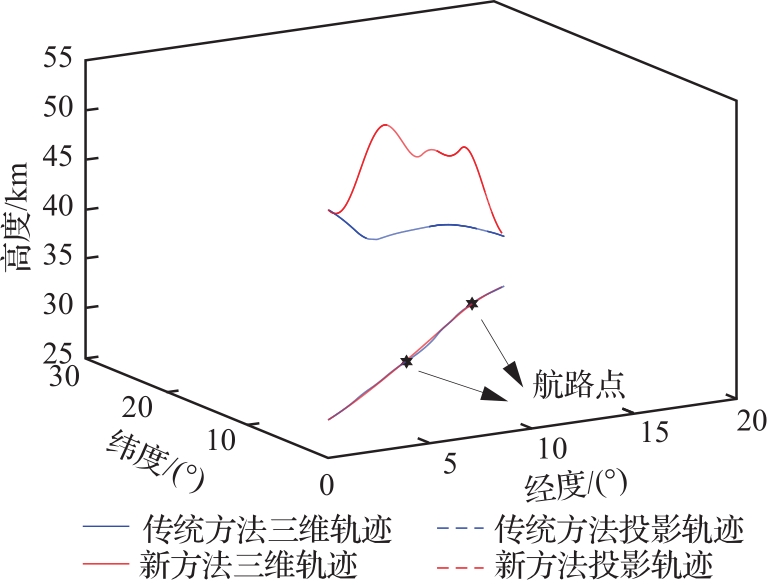
Fig.16
Bank angle change comparison results
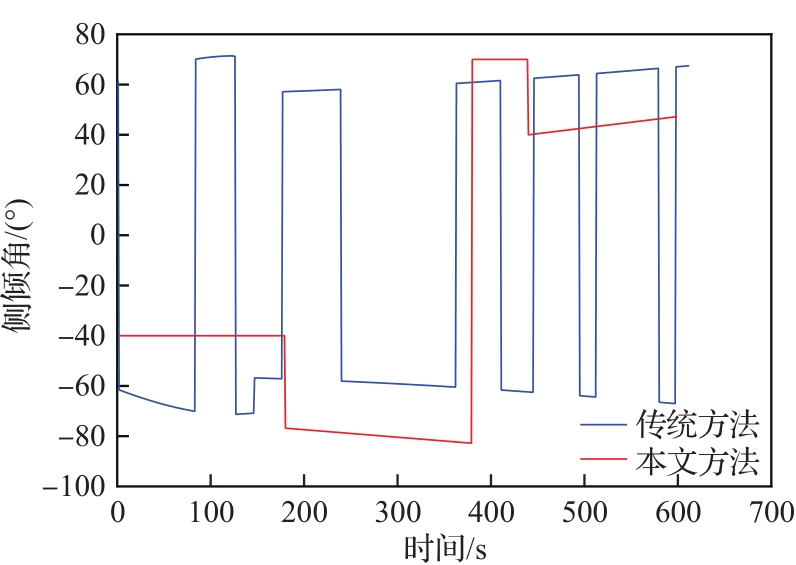

Fig.17
Residual energy change comparison results


Fig.18
Path constraint change comparison results


Fig.19
Waypoint generation based on geodetic line
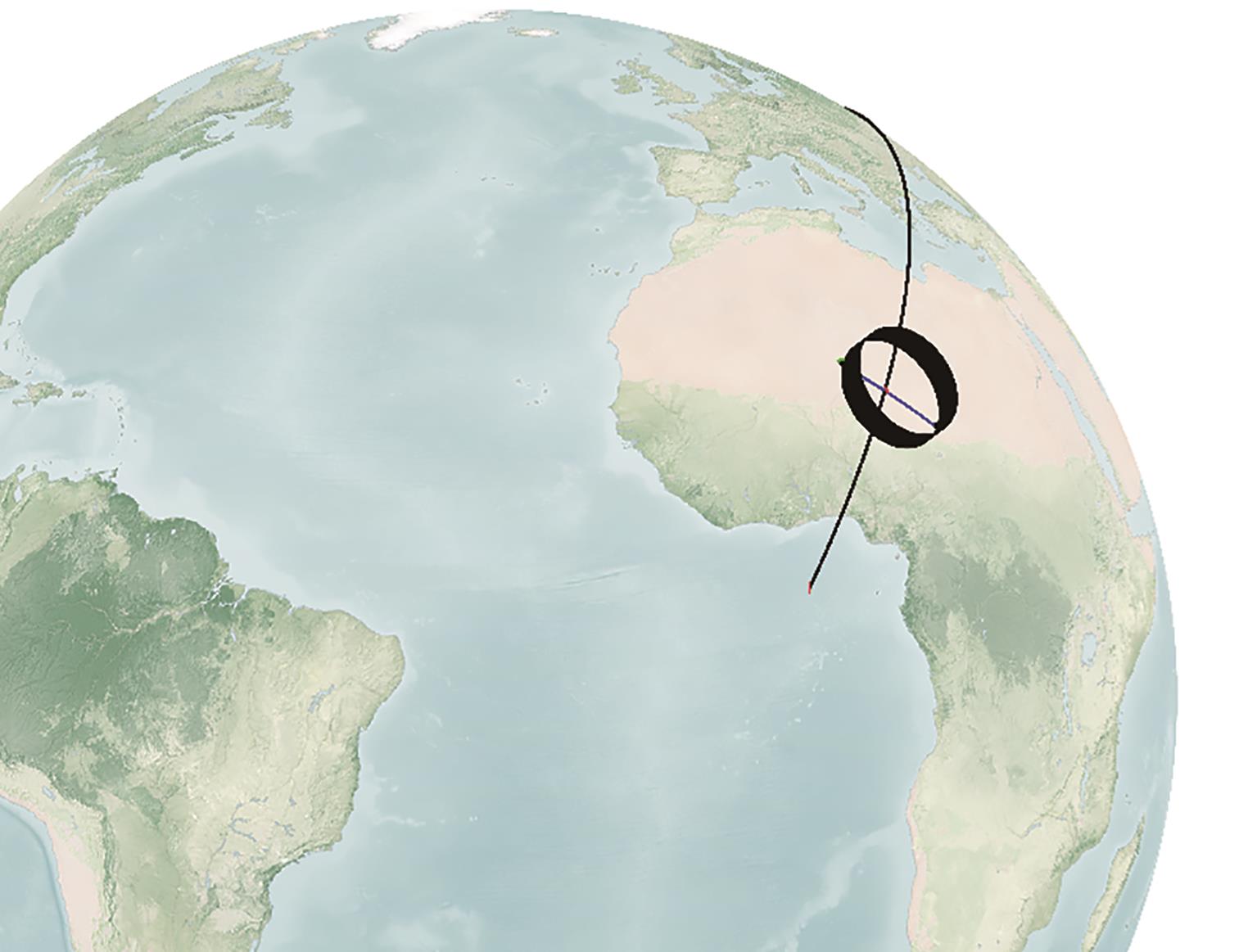
Fig.20
Planar projection

Table 4
Starting and ending point information
| 点位 | 起点 | 终点 |
|---|---|---|
| 坐标/(°) | (0,0) | (90,10) |
Table 5
Threat areas information
| 参数 | 威胁区 | ||
|---|---|---|---|
| 1 | 2 | 3 | |
| 坐标/(°) | (30,12) | (60,5) | (80,20) |
| 半径/km | 650 | 1 100 | 900 |
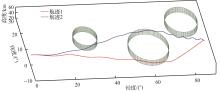
Fig.21
Space trajectory
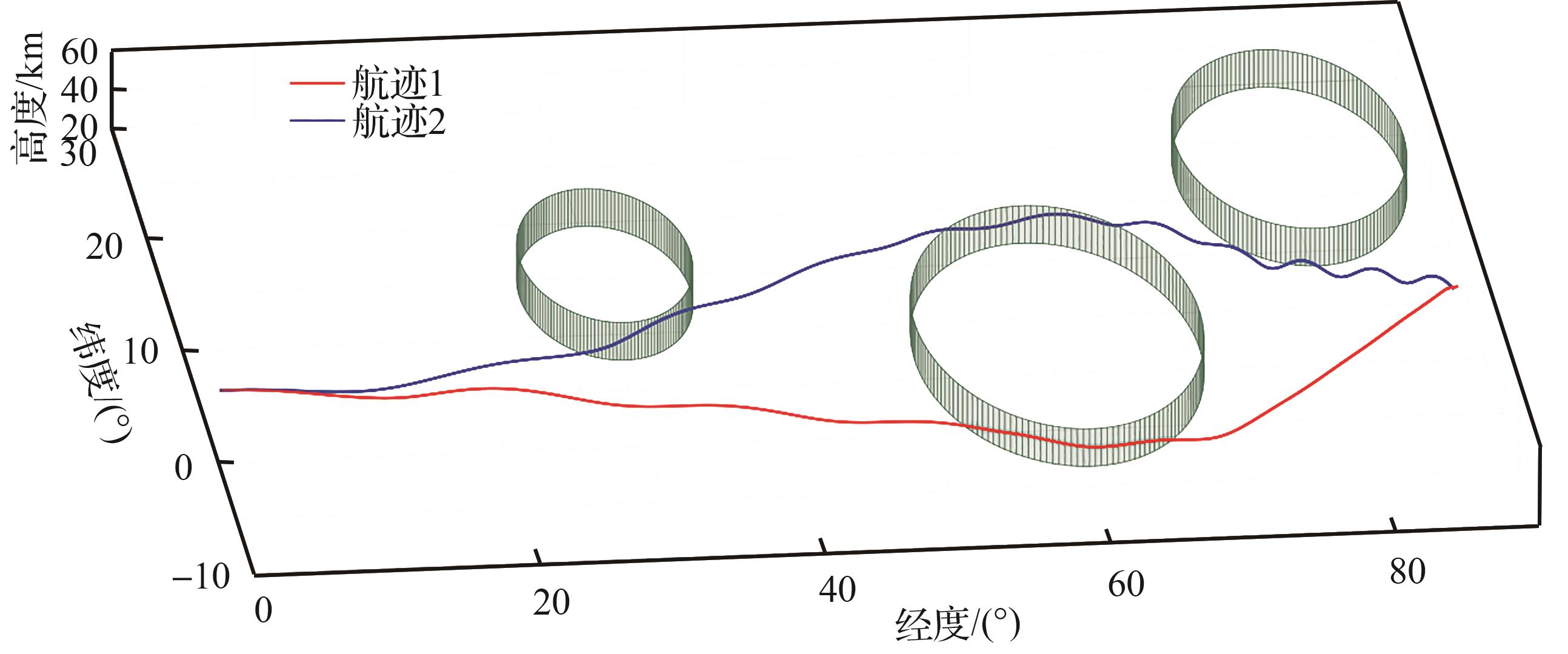
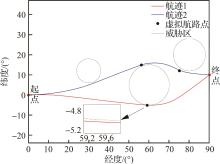
Fig.22
Plane trajectory
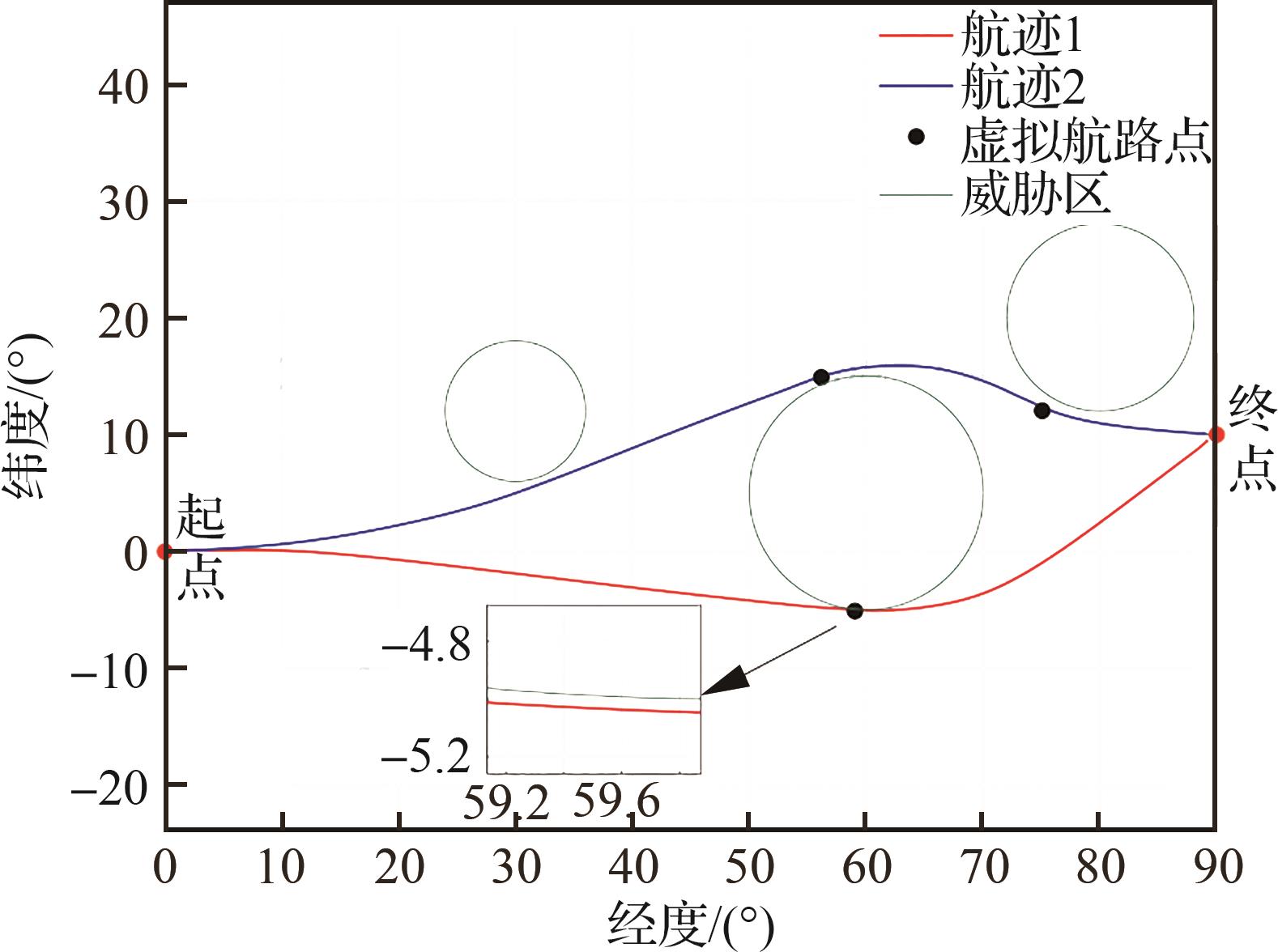

Fig.23
Height-velocity change results

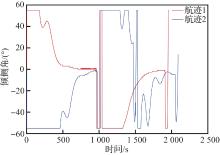
Fig.24
Variation of bank angle
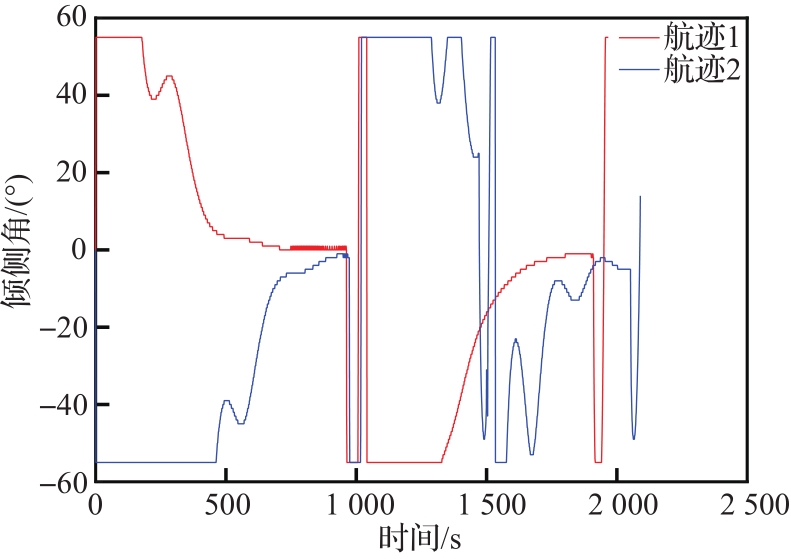

Fig.25
Variation of residual energy


Fig.26
Plane trajectory under Monte Carlo simulation
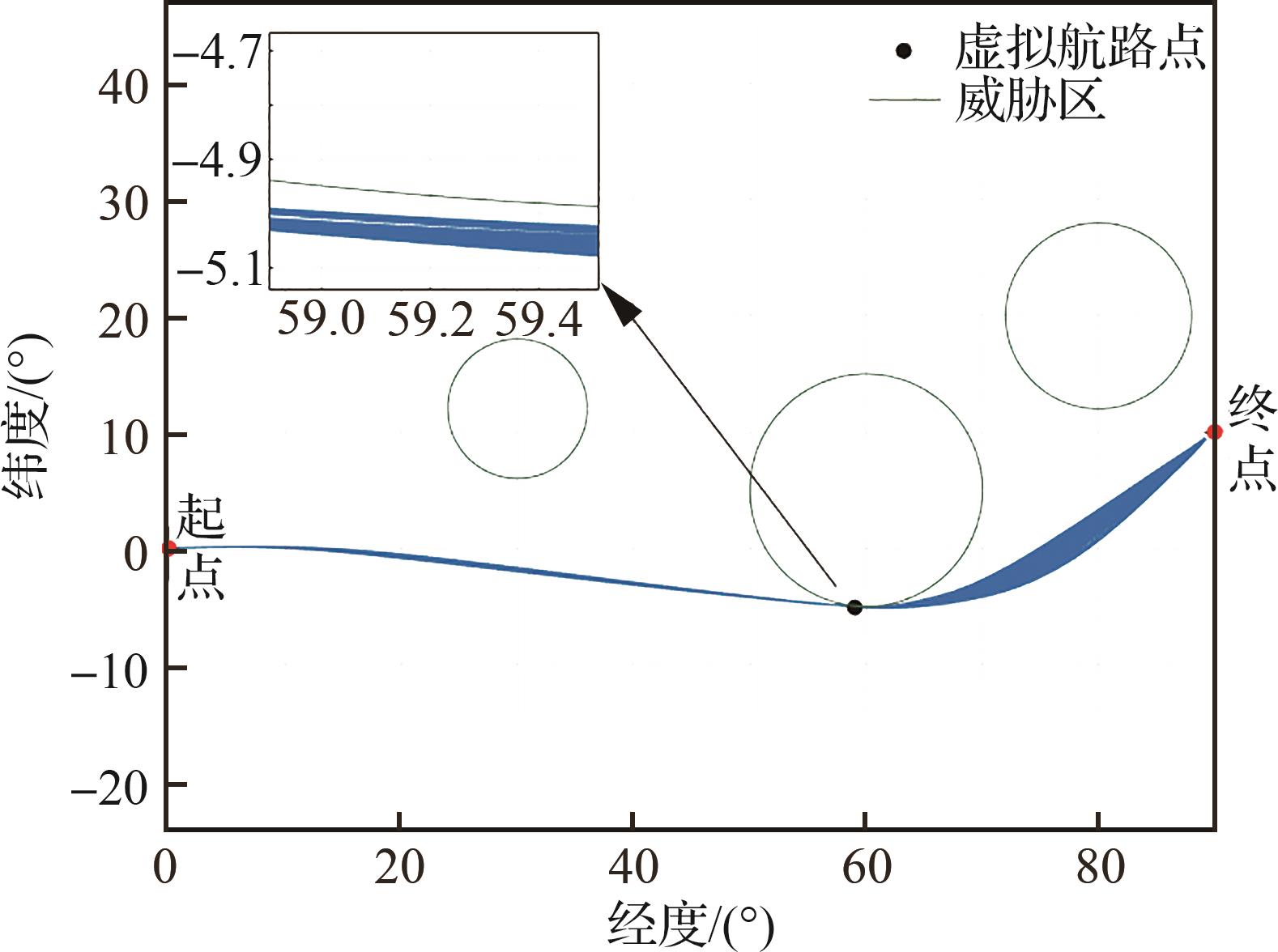

Fig.27
Results of height-velocity change under Monte Carlo simulation
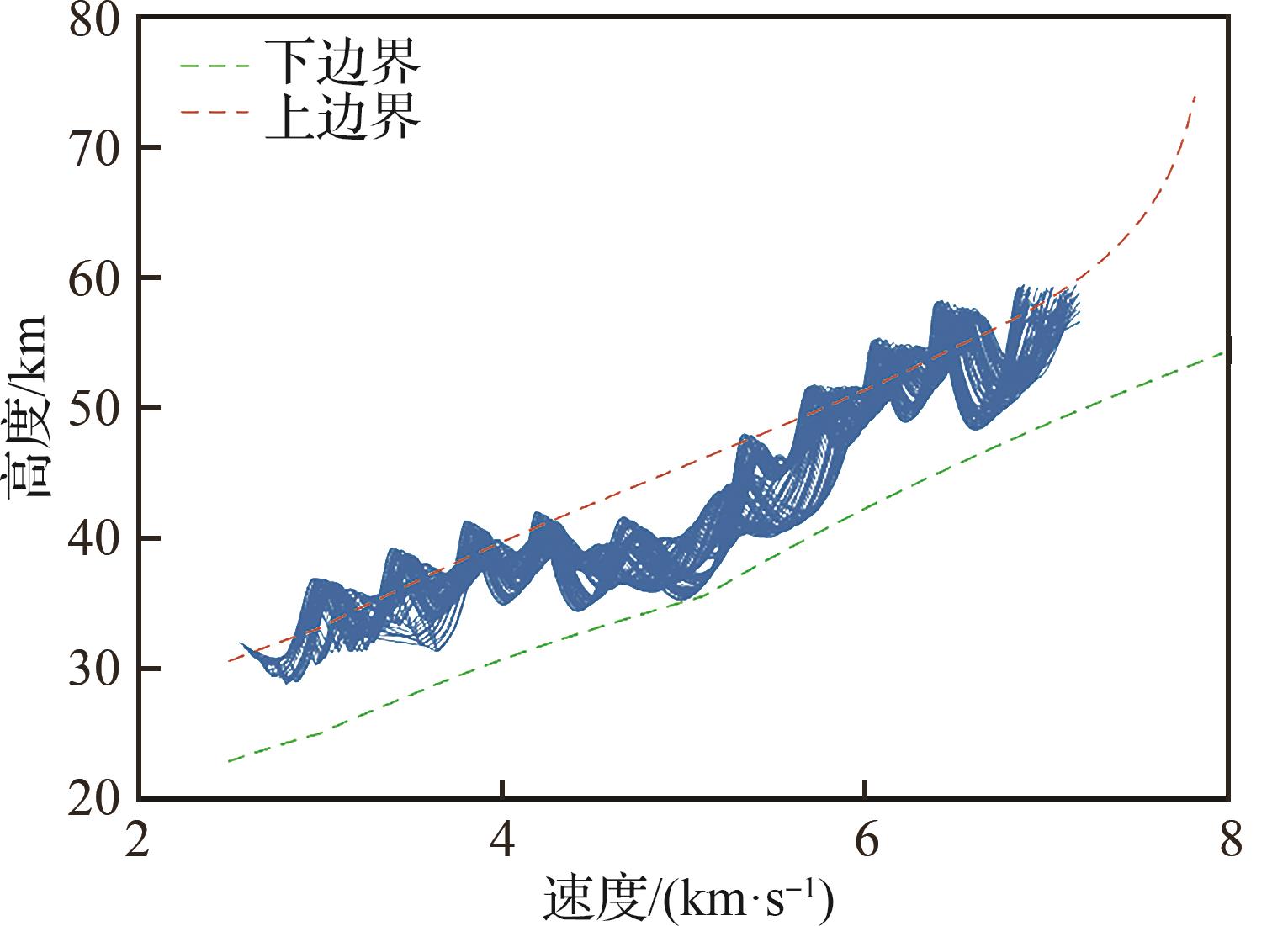
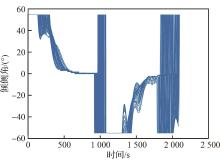
Fig.28
Results of bank angle change under Monte Carlo simulation


Fig.29
Results of residual energy change under Monte Carlo simulation
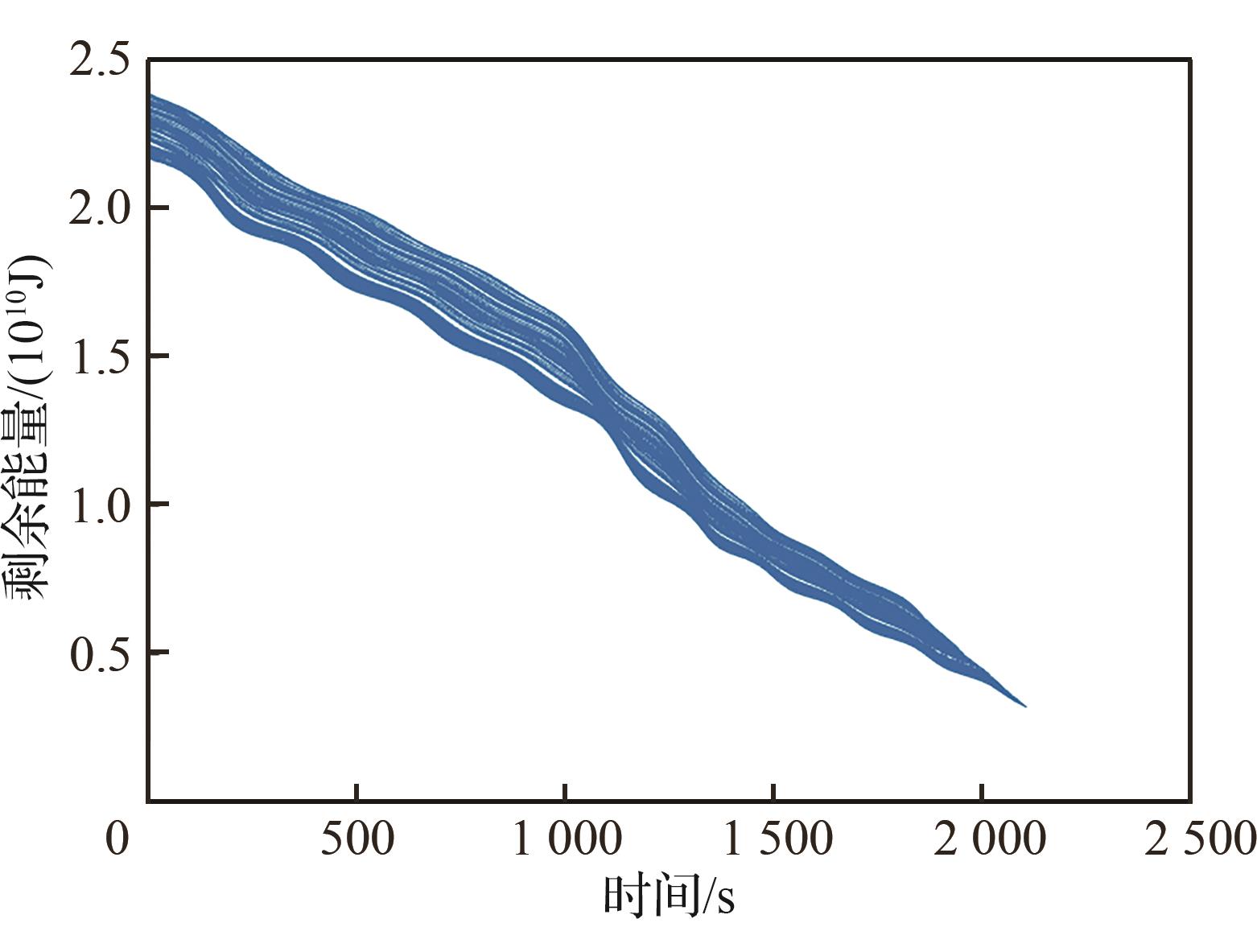
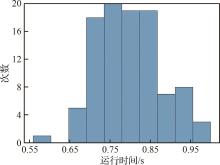
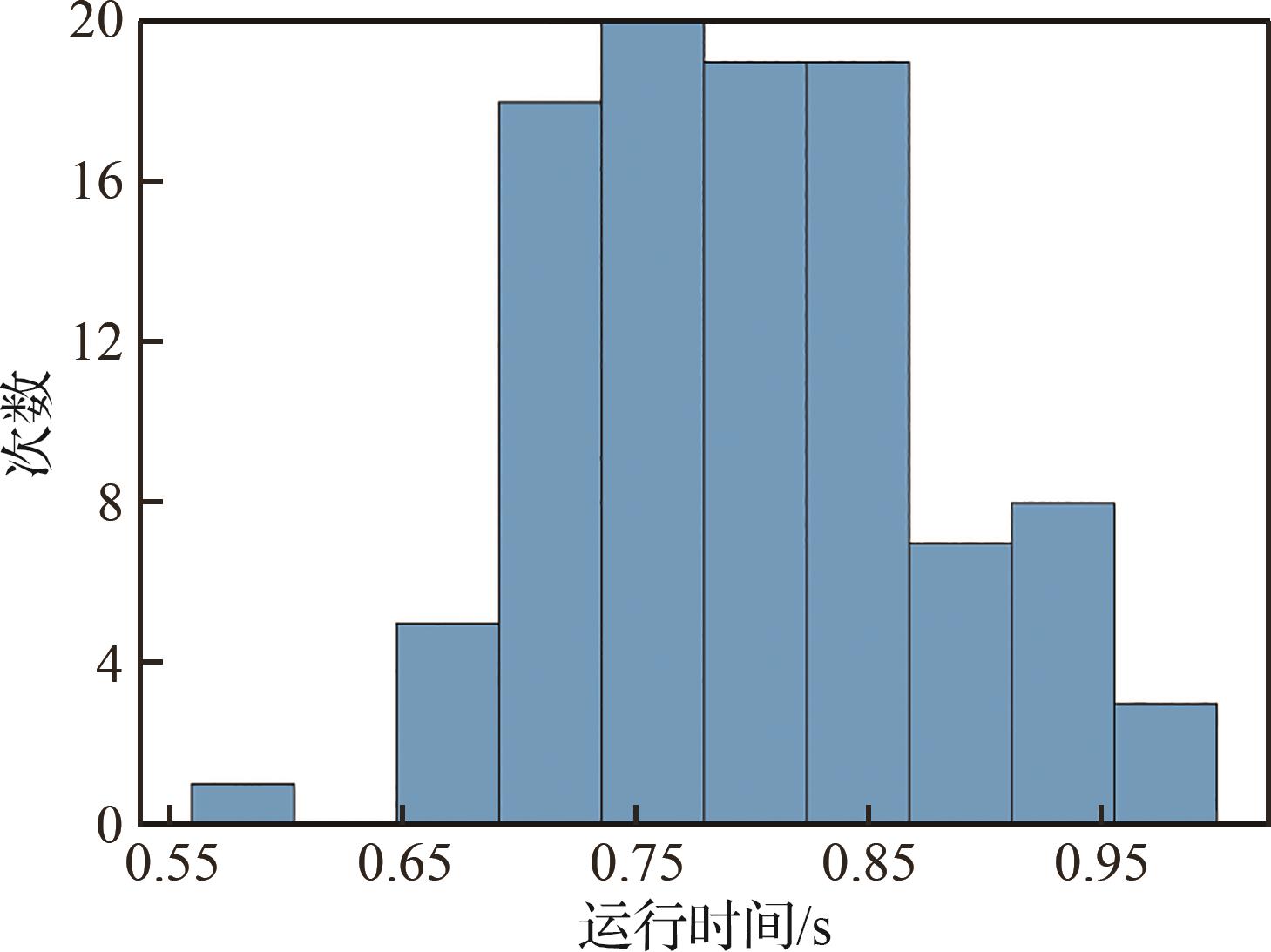
Fig.30
Distribution diagram of running time
| 1 | 张远龙, 谢愈. 滑翔飞行器弹道规划与制导方法综述[J]. 航空学报, 2020, 41(1): 023377. |
| ZHANG Y L, XIE Y. Review of trajectory planning and guidance methods for gliding vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 023377 (in Chinese). | |
| 2 | FARIDI A Q, SHARMA S, SHUKLA A, et al. Multi-robot multi-target dynamic path planning using artificial bee colony and evolutionary programming in unknown environment[J]. Intelligent Service Robotics, 2018, 11(2): 171-186. |
| 3 | GUO T, JIANG N, LI B Y, et al. UAV navigation in high dynamic environments: A deep reinforcement learning approach[J]. Chinese Journal of Aeronautics, 2021, 34(2): 479-489. |
| 4 | KONG X D, PAN B, CHERKASHIN E, et al. Multi-constraint UAV fast path planning based on improved A* algorithm[J]. Journal of Physics: Conference Series, 2020, 1624(4): 042009. |
| 5 | 黄长强, 国海峰, 丁达理. 高超声速滑翔飞行器轨迹优化与制导综述[J]. 宇航学报, 2014, 35(4): 369-379. |
| HUANG C Q, GUO H F, DING D L. A survey of trajectory optimization and guidance for hypersonic gliding vehicle[J]. Journal of Astronautics, 2014, 35(4): 369-379 (in Chinese). | |
| 6 | 赵吉松, 尚腾, 张金明, 等. 带有控制变量变化率约束的伪谱轨迹优化方法[J]. 宇航学报, 2022, 43(10): 1368-1377. |
| ZHAO J S, SHANG T, ZHANG J M, et al. Pseudo-spectral trajectory optimization method with constraint on the change rate of control variables[J]. Journal of Astronautics, 2022, 43(10): 1368-1377 (in Chinese). | |
| 7 | 宋超, 黎志强, 刘旭. 考虑航路点的飞行器再入轨迹优化与仿真[J]. 航空计算技术, 2019, 49(1): 19-23. |
| SONG C, LI Z Q, LIU X. Reentry trajectory optimization and simulation of aircraft with waypoints considered[J]. Aeronautical Computing Technique, 2019, 49(1): 19-23 (in Chinese). | |
| 8 | 梅映雪, 冯玥, 王容顺, 等. 高超声速飞行器多约束再入轨迹快速优化[J]. 宇航学报, 2019, 40(7): 758-767. |
| MEI Y X, FENG Y, WANG R S, et al. Fast optimization of reentry trajectory for hypersonic vehicles with multiple constraints[J]. Journal of Astronautics, 2019, 40(7): 758-767 (in Chinese). | |
| 9 | 刘哲, 贾生伟, 张鸣, 等. 再入轨迹多约束模型预测静态凸规划方法[J]. 宇航学报, 2022, 43(12): 1638-1651. |
| LIU Z, JIA S W, ZHANG M, et al. Reentry trajectory optimization based on constrained model predictive static convex programming[J]. Journal of Astronautics, 2022, 43(12): 1638-1651 (in Chinese). | |
| 10 | 高长生, 陈尔康, 荆武兴. 高超声速飞行器机动规避轨迹优化[J]. 哈尔滨工业大学学报, 2017, 49(4): 16-21. |
| GAO C S, CHEN E K, JING W X. Maneuver evasion trajectory optimization for hypersonic vehicles[J]. Journal of Harbin Institute of Technology, 2017, 49(4): 16-21 (in Chinese). | |
| 11 | ZHAO J, ZHOU R. Reentry trajectory optimization for hypersonic vehicle satisfying complex constraints[J]. Chinese Journal of Aeronautics, 2013, 26(6): 1544-1553. |
| 12 | 王路, 邢清华, 毛艺帆. 复杂约束条件下再入高超声速滑翔飞行器轨迹快速优化[J]. 固体火箭技术, 2016, 39(6): 839-846, 862. |
| WANG L, XING Q H, MAO Y F. Trajectory rapid optimization for reentry hypersonic glide vehicle satisfying complex constraints[J]. Journal of Solid Rocket Technology, 2016, 39(6): 839-846, 862 (in Chinese). | |
| 13 | 谢愈, 潘亮, 谷学强, 等. 高超声速飞行器多目标复杂约束滑翔弹道优化[J]. 国防科技大学学报, 2017, 39(2): 9-17. |
| XIE Y, PAN L, GU X Q, et al. Gliding trajectory optimization with multiple objectives and complicated constraints for hypersonic vehicles[J]. Journal of National University of Defense Technology, 2017, 39(2): 9-17 (in Chinese). | |
| 14 | WANG X, GUO J, TANG S J, et al. Entry trajectory planning with terminal full states constraints and multiple geographic constraints[J]. Aerospace Science and Technology, 2019, 84: 620-631. |
| 15 | 李帅聪, 何睿智, 汤国建, 等. 基于滑模控制的剖面跟踪制导律[J]. 航空学报, 2020, 41(S2): 724578. |
| LI S C, HE R Z, TANG G J, et al. Profile tracking guidance law based on sliding mode control[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 724578 (in Chinese). | |
| 16 | XIE Y, LIU L H, TANG G J, et al. Highly constrained entry trajectory generation[J]. Acta Astronautica, 2013, 88: 44-60. |
| 17 | 姜鹏, 郭栋, 韩亮, 等. 多飞行器再入段时间协同弹道规划方法[J]. 航空学报, 2020, 41(S1): 723776. |
| JIANG P, GUO D, HAN L, et al. Trajectory optimization for cooperative reentry of multiple hypersonic glide vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723776 (in Chinese). | |
| 18 | ZHANG D, LIU L, WANG Y J. On-line reentry guidance algorithm with both path and no-fly zone constraints[J]. Acta Astronautica, 2015, 117: 243-253. |
| 19 | HE R Z, LIU L H, TANG G J, et al. Entry trajectory generation without reversal of bank angle[J]. Aerospace Science and Technology, 2017, 71: 627-635. |
| 20 | 惠俊鹏, 汪韧, 俞启东. 基于强化学习的再入飞行器“新质”走廊在线生成技术[J]. 航空学报, 2022, 43(9): 325960. |
| HUI J P, WANG R, YU Q D. Generating new quality flight corridor for reentry aircraft based on reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(9): 325960 (in Chinese). | |
| 21 | XU H, CAI G B, ZHANG S X, et al. Hypersonic reentry trajectory optimization by using improved sparrow search algorithm and control parametrization method[J]. Advances in Space Research, 2022, 69(6): 2512-2524. |
| 22 | JIANG Z Y, GE J Q, XU Q Q, et al. Fast trajectory optimization for gliding reentry vehicle based on improved sparrow search algorithm[J]. Journal of Physics: Conference Series, 2021, 1986(1): 012114. |
| 23 | SHAHZAD SANA K, HU W D. Hypersonic reentry trajectory planning by using hybrid fractional-order particle swarm optimization and gravitational search algorithm[J]. Chinese Journal of Aeronautics, 2021, 34(1): 50-67. |
| 24 | LIANG Z X, REN Z. Tentacle-based guidance for entry flight with No-fly zone constraint[J]. Journal of Guidance, Control, and Dynamics, 2017, 41(4): 996-1005. |
| 25 | 高杨, 蔡光斌, 张胜修, 等. 多禁飞区高超声速滑翔飞行器再入机动制导[J]. 兵器装备工程学报, 2019, 40(8): 32-39. |
| GAO Y, CAI G B, ZHANG S X, et al. Reentry maneuver guidance for hypersonic glide vehicles under multiple No-fly zones[J]. Journal of Ordnance Equipment Engineering, 2019, 40(8): 32-39 (in Chinese). | |
| 26 | 高杨, 蔡光斌, 徐慧, 等. 虚拟多触角探测的高超声速滑翔飞行器再入机动制导[J]. 航空学报, 2020, 41(11): 623703. |
| GAO Y, CAI G B, XU H, et al. Reentry maneuver guidance of hypersonic glide vehicle under virtual multi-tentacle detection[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(11): 623703 (in Chinese). | |
| 27 | HE R Z, LIU L H, TANG G J, et al. Rapid generation of entry trajectory with multiple no-fly zone constraints[J]. Advances in Space Research, 2017, 60(7): 1430-1442. |
| 28 | 申连杰. 高超声速滑翔飞行器机动策略与制导方法研究[D]. 长沙: 国防科学技术大学, 2015: 25-30. |
| SHEN L J. Research on maneuver strategy and guidance algorithm for hypersonic glide vehicles[D]. Changsha: National University of Defense Technology, 2015: 25-30 (in Chinese). | |
| 29 | 张源, 张冉, 李惠峰. 复杂禁飞区高超声速飞行器路径—轨迹双层规划[J]. 宇航学报, 2022, 43(5): 615-627. |
| ZHANG Y, ZHANG R, LI H F. Dual-level path-trajectory generation with complex No-fly zone constraints for hypersonic vehicle[J]. Journal of Astronautics, 2022, 43(5): 615-627 (in Chinese). | |
| 30 | ZHANG Y, ZHANG R, LI H F. Graph-based path decision modeling for hypersonic vehicles with no-fly zone constraints[J]. Aerospace Science and Technology, 2021, 116: 106857. |
| 31 | VINH N X, BUSEMANN A, CULP R D. Hypersonic and planetary entry flight mechanics[M]. Ann Arbor: University of Michigan Press, 1980. |
| 32 | 吕志平, 乔书波. 大地测量学基础[M]. 2版. 北京: 测绘出版社, 2016: 210-231. |
| LÜ/LV/LU/LYU) Z P, QIAO S B. Fundamentals of geodesy[M]. 2nd ed. Beijing: Sino Maps Press, 2016: 210-231 (in Chinese). | |
| 33 | Phillips T H. A common aero vehicle (CAV) model, description, and employment guide[R]. Arlington: Schafer Corporation for AFRL and AFSPC, 2003. |
| [1] | Zhengyu SONG. Promoting continuous innovation in space transportation systems: Control technologies and challenges [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531446-531446. |
| [2] | Xunliang YAN, Yuxuan YANG, Jiawei SHI, Peichen WANG. Rapid ascent-phase trajectory planning for near-optimal fuel consumption of RBCC vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 231876-231876. |
| [3] | Chen WANG, Caisheng WEI, Zeyang YIN, Kai JIN, Xingchen LI. Collaborative planning of multi-UAV trajectories and communication strategies considering channel resource constraints [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 331837-331837. |
| [4] | Xunliang YAN, Peichen WANG, Yang GUO. Review of trajectory planning and guidance methods for entry glide maneuvering penetration [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331810-331810. |
| [5] | Jianye SUN, Dong YE, Yan XIAO. Active observation trajectory planning for non-cooperative spacecraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331587-331587. |
| [6] | Zijie YU, Zheng ZHENG, Qingdong LI, Lin GUO, Suping REN, Jian GUO. Trajectory planning for solar-powered UAVs based on deep reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 331420-331420. |
| [7] | Juntong WANG, Danwen BAO, Jiayi ZHOU, Jingxuan SHANG, Ziqian ZHANG. Low-altitude airspace planning: A review and prospect [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 530879-530879. |
| [8] | Junzhi LI, Teng LONG, Jingliang SUN, Hongyu MIAO, Zhenlin ZHOU. Differential flatness-based spatial-temporal hierarchical trajectory planning for fixed-wing UAVs in urban environments [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531369-531369. |
| [9] | Weicheng DI, Jinkui XU, Zixing WEI, Jinwu XIANG, Zhan TU. Aerial-ground heterogeneous cooperation based on multi-round task allocation method [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531348-531348. |
| [10] | Yumei HU, Quan PAN, Bao DENG. A Fisher information based adaptive filtering algorithm for sensor trajectory planning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 629825-629825. |
| [11] | Zhe LIU, Xige ZHANG, Changzhu WEI, Naigang CUI. High-precision adaptive convex programming for reentry trajectories of suborbital vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729430-729430. |
| [12] | Zhenwei WANG, Kai LIU, Jian GUO, Xiaopeng LIU. A multi⁃UAVs and multi⁃USVs formation cooperative mechanism based on leader⁃follower strategy [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729791-729791. |
| [13] | Yongzhi SHENG, Jiahao GAN, Chengxin ZHANG. Fractional order sliding mode guidance law design with trajectory adjustable and terminal angular constraint [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327073-327073. |
| [14] | Shengqing YANG, Jingyu WU, Wenshan ZHU, Chao ZHONG. Control method of constellation relative-configuration maintenance based on inter-satellite links [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(6): 326796-326796. |
| [15] | Runhang TENG, Kelun HE, Tian ZHAO, Xiaoxiao YU, Xikui YU, Xianghua XU, Xingang LIANG, Qun CHEN. Unified modeling and analysis method of multi-energy flow for aircraft energy and thermal management system [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 128427-128427. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341