Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (24): 331995.doi: 10.7527/S1000-6893.2025.31995
• Electronics and Electrical Engineering and Control • Previous Articles
Erchao RONG, Yuying ZHANG, Junning LIANG, Ximin LYU( )
)
Received:2025-03-19
Revised:2025-04-22
Accepted:2025-07-03
Online:2025-07-31
Published:2025-07-25
Contact:
Ximin LYU
E-mail:lvxm6@mail.sysu.edu.cn
Supported by:CLC Number:
Erchao RONG, Yuying ZHANG, Junning LIANG, Ximin LYU. Neural-network aerodynamics-based NMPC trajectory tracking control for a tail-sitter VTOL UAV[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 331995.

Fig.1
Aircraft coordinate frame
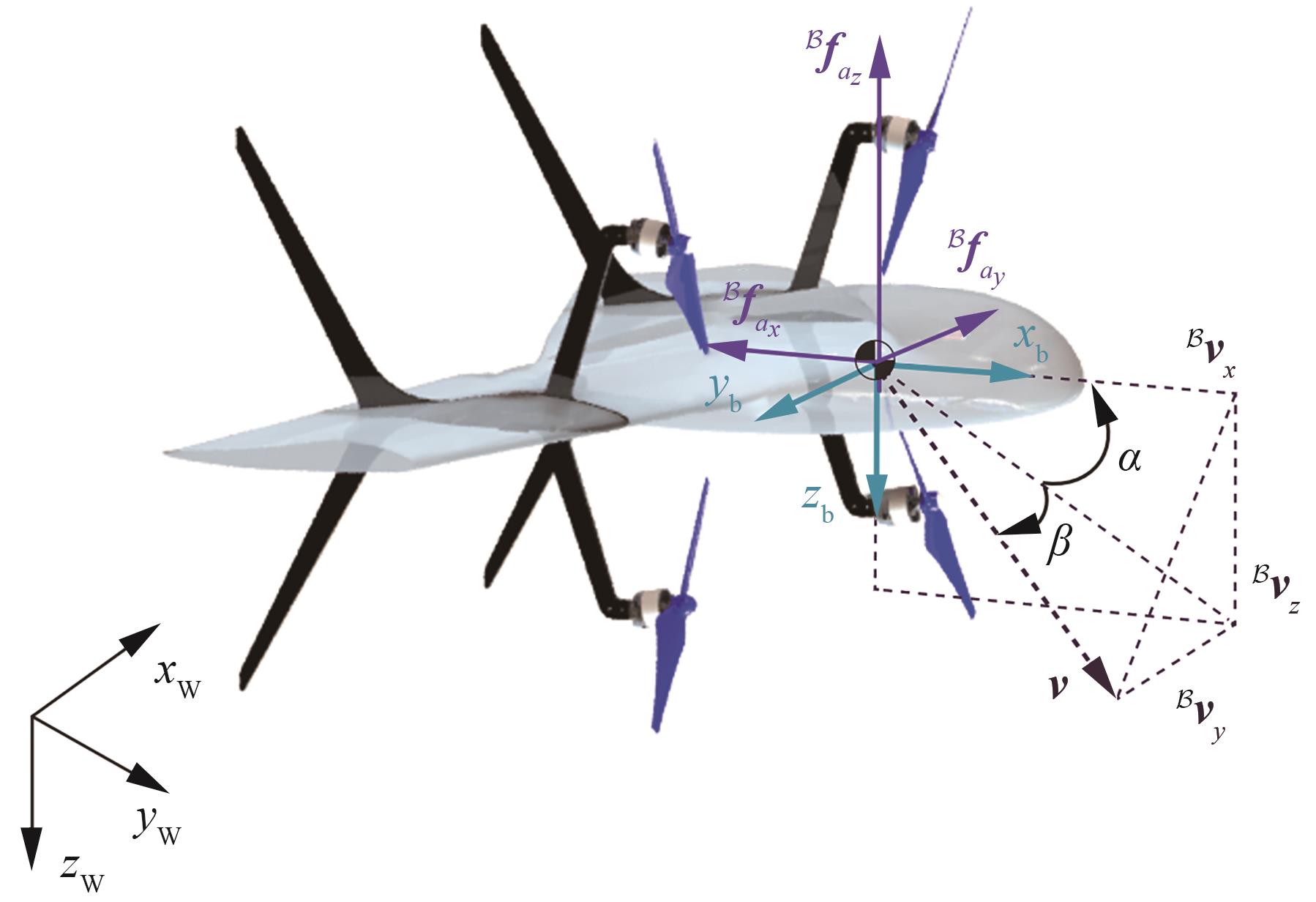
Fig.2
Longitudinal aerodynamic coefficients
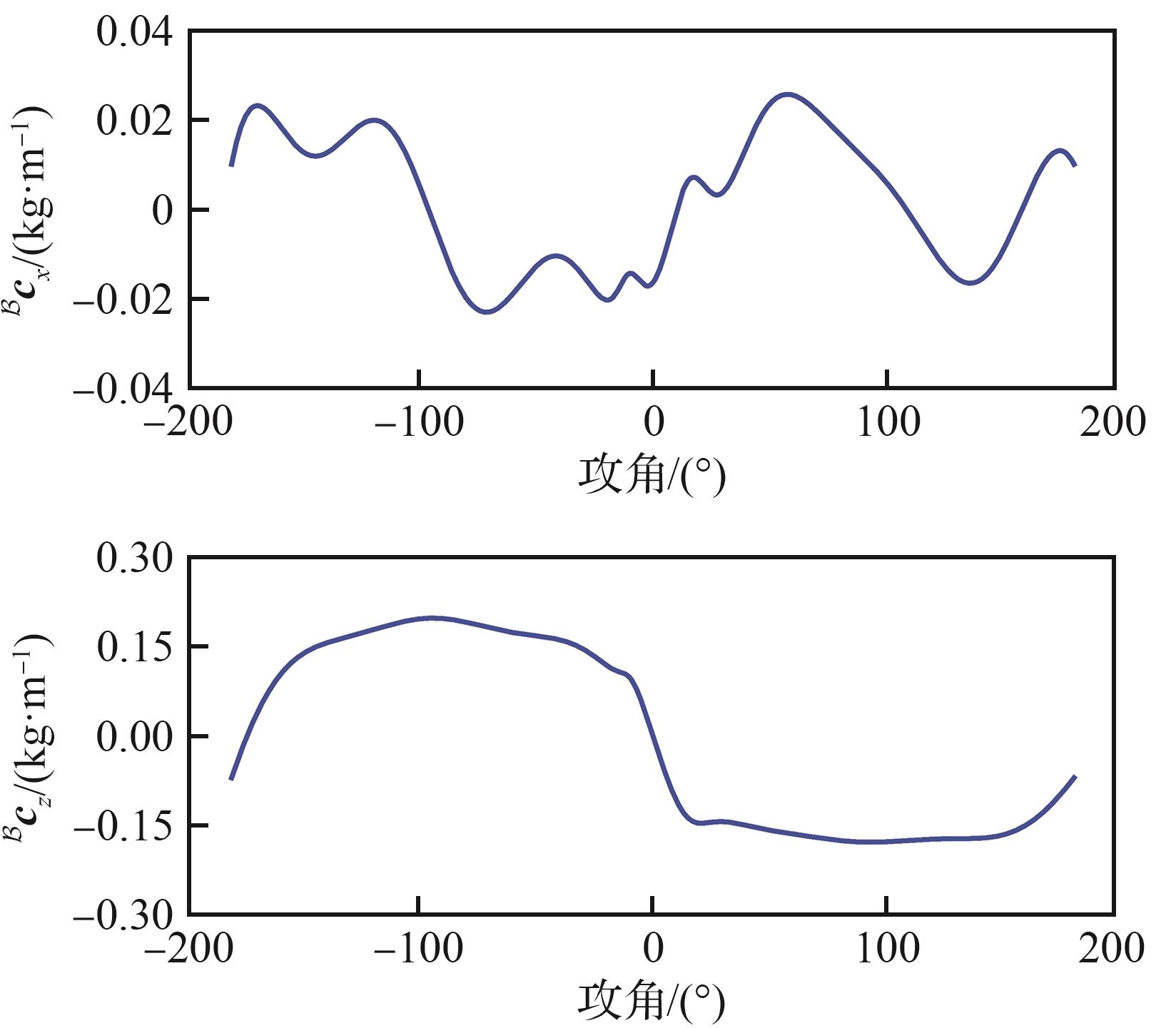

Fig.3
Flight envelope of a tail-sitter VTOL UAV
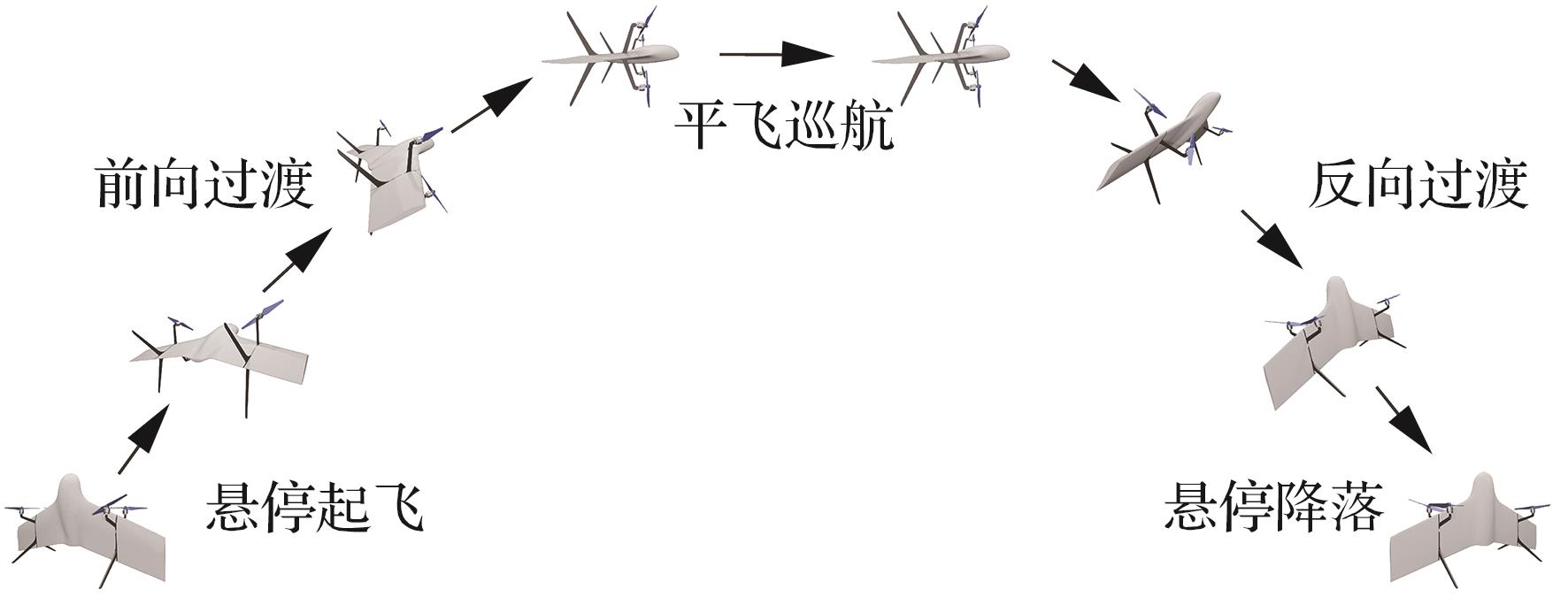

Fig.4
Results of calculation of attainable moment set and required moment set convex hulls
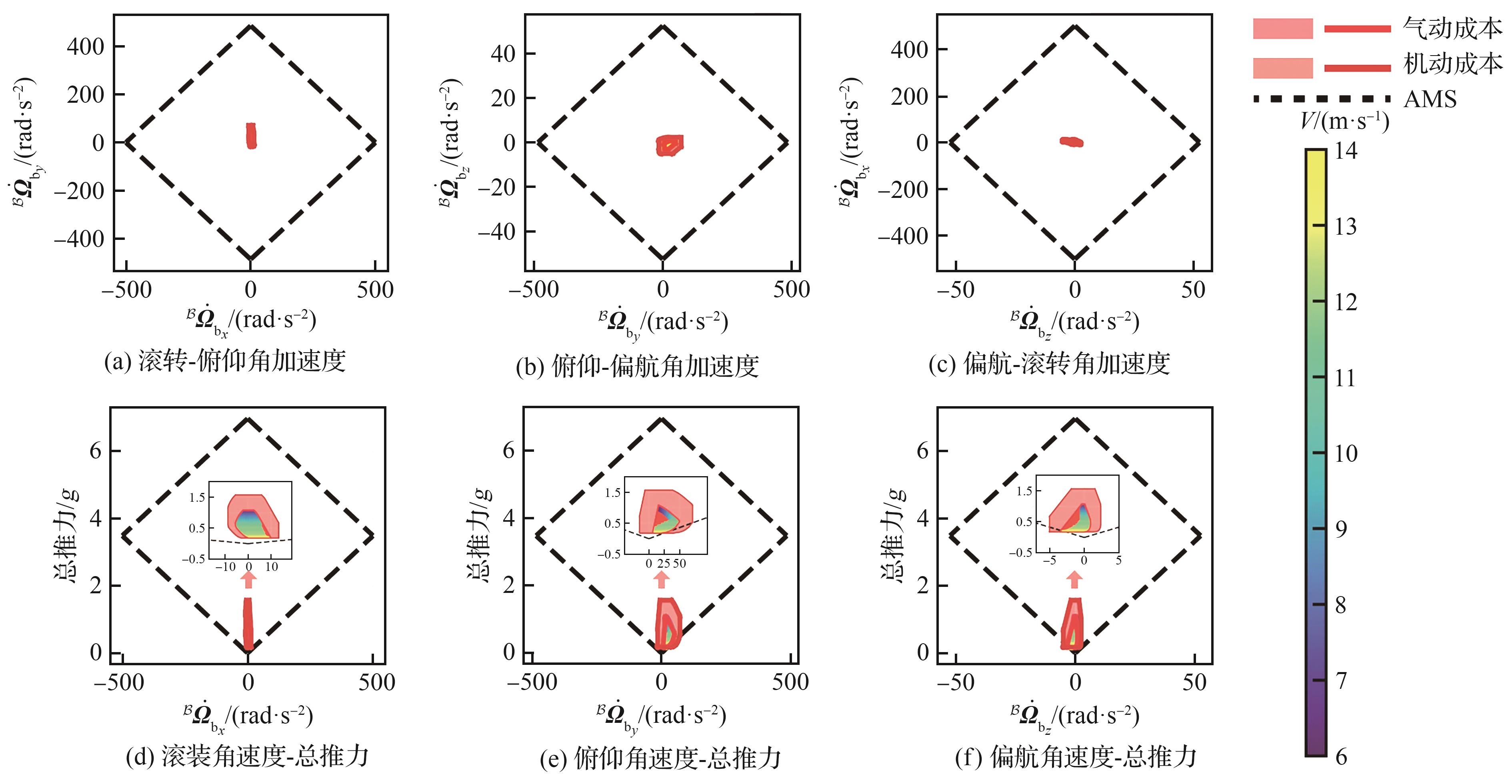

Fig.5
System diagram
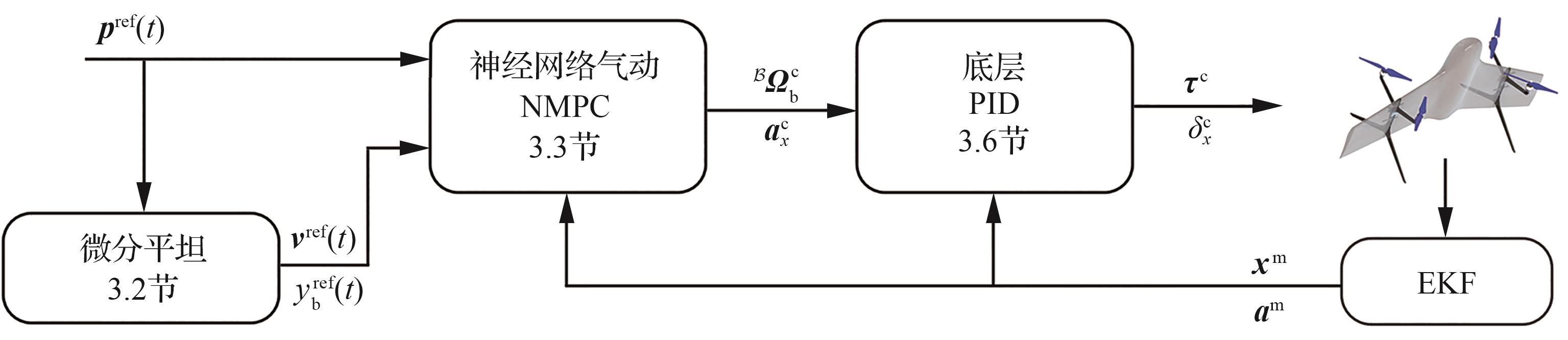

Fig.6
Neural network aerodynamic model
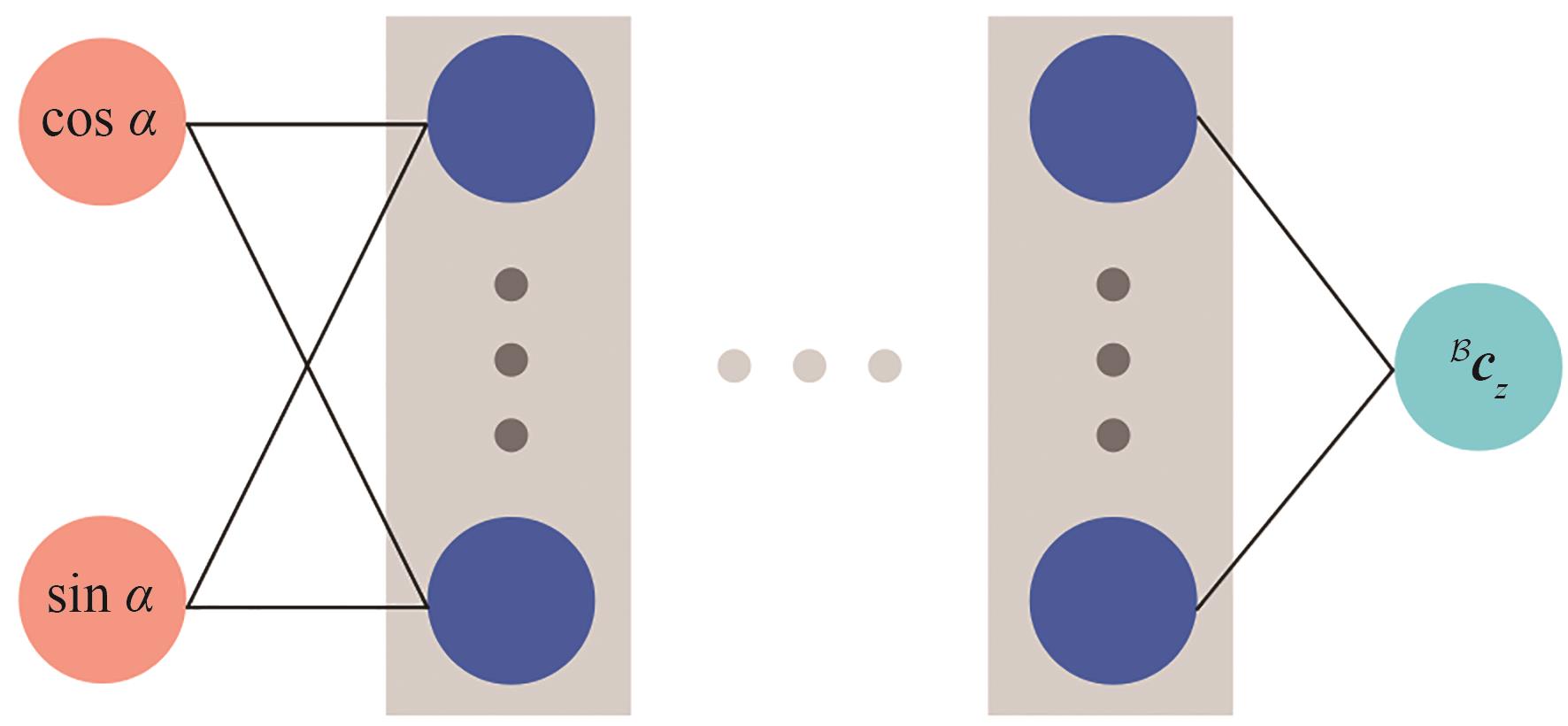
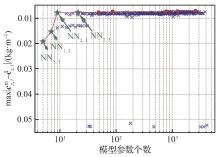
Fig.7
Training results
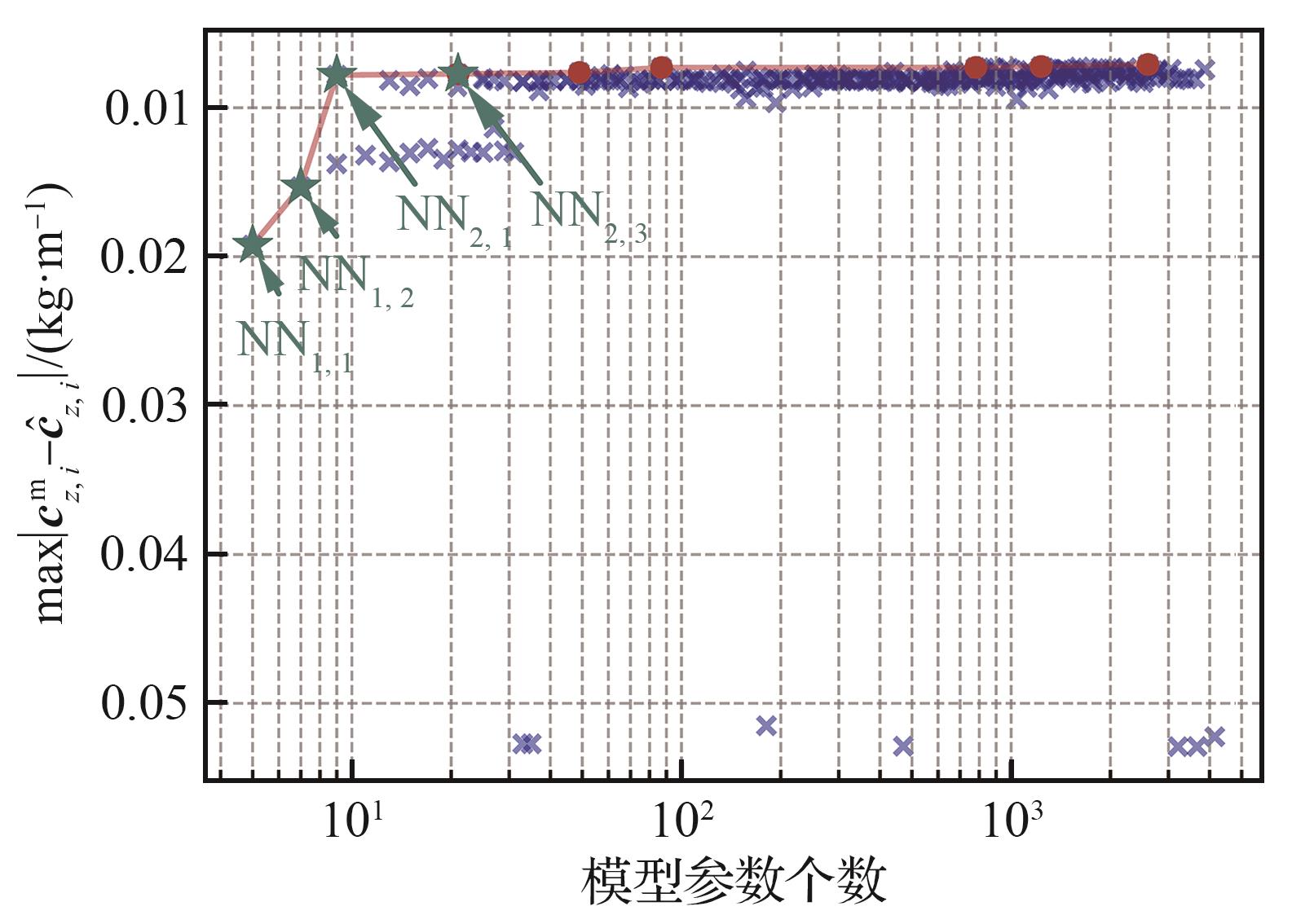
Fig.8
Fitting results of different neural-network aerodynamic models
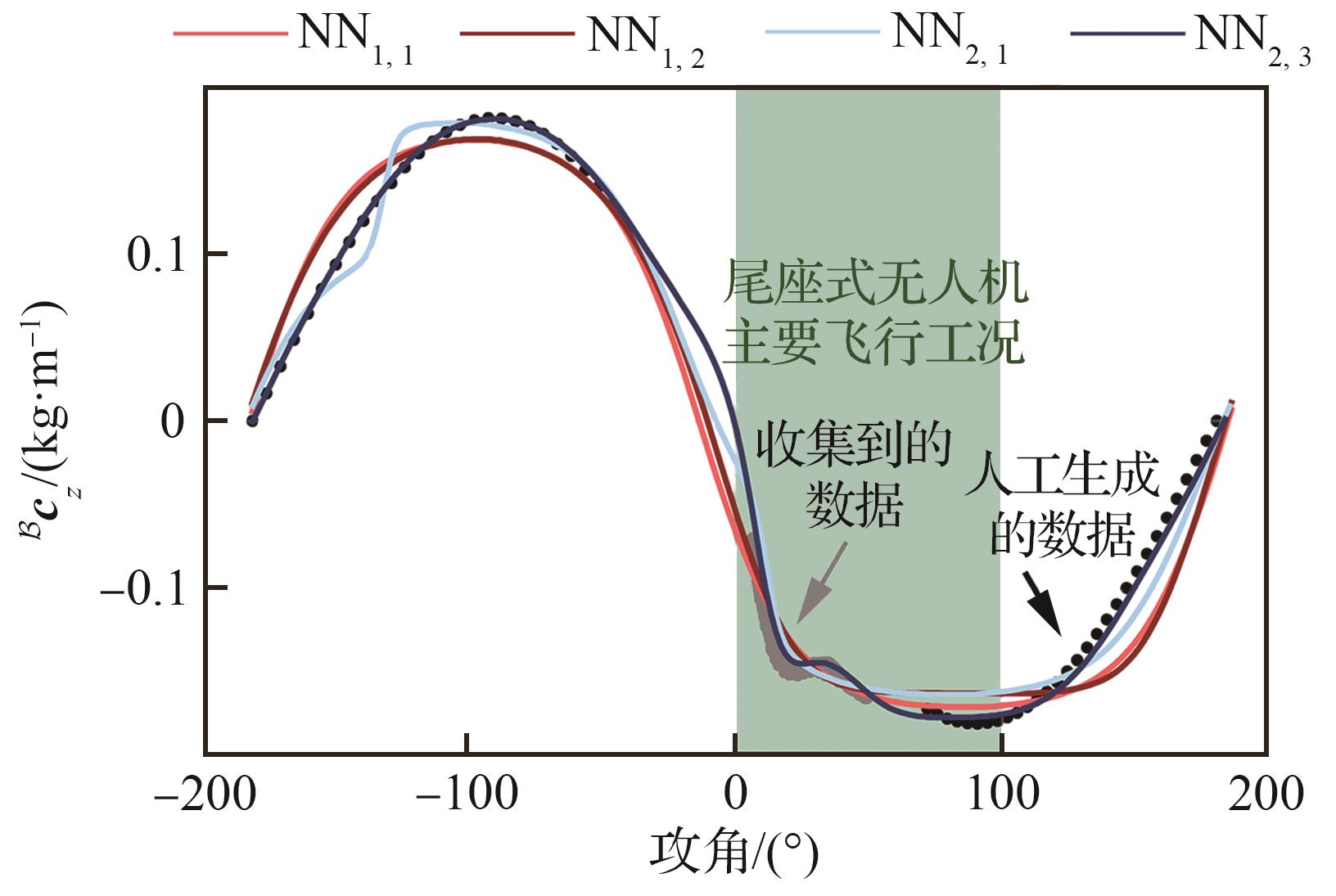
Table 1
Comparison of tracking performance for different neural-network aerodynamic model configurations
| 模型 | 水平位置均方误差均值/cm | 垂直位置均方误差均值/cm | 最大位置误差均值/cm |
|---|---|---|---|
| 无气动 | |||
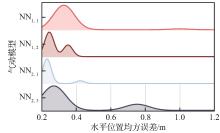
Fig.9
Density of horizontal positional RMSE for different neural-network aerodynamic models
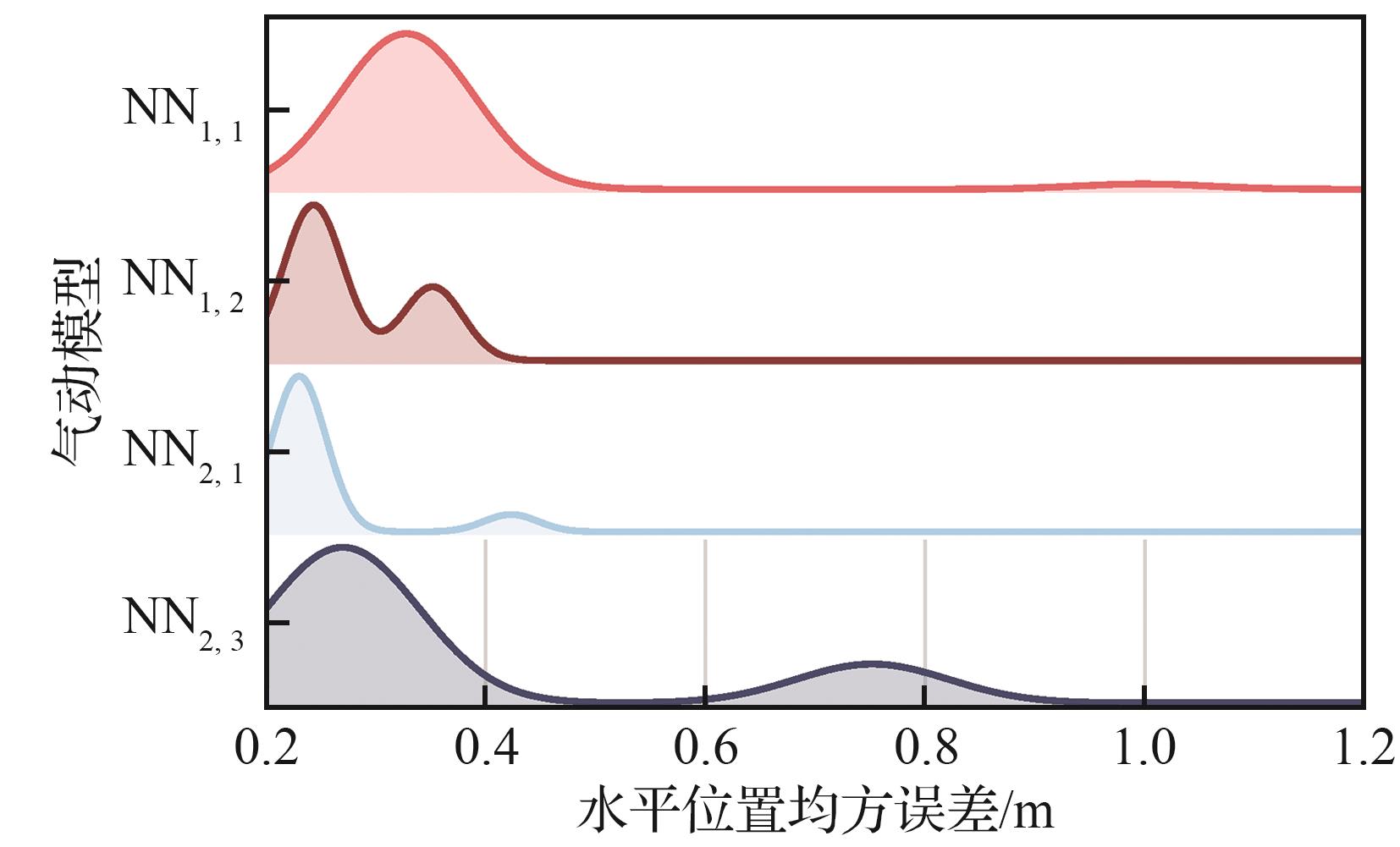

Fig.10
Trajectory tracking results for different neural-network aerodynamic model configurations
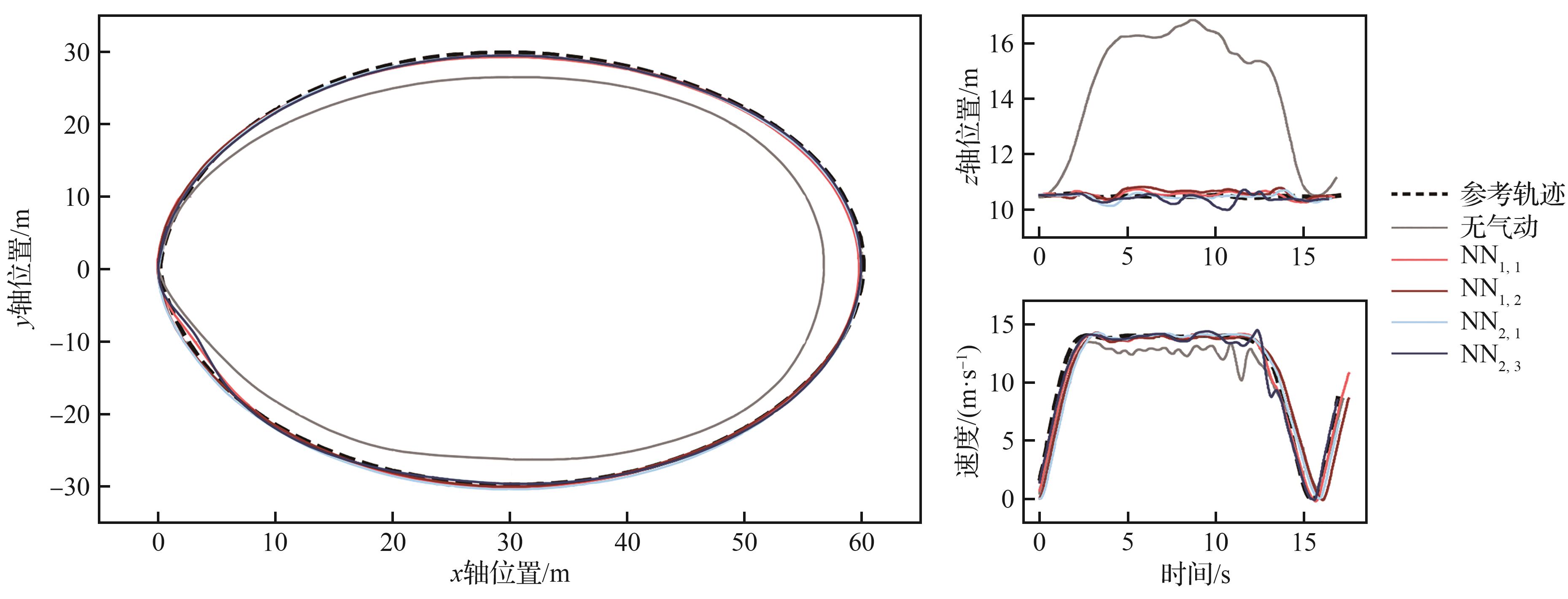
Fig.11
Solution time for different neural-network aerodynamic model configurations
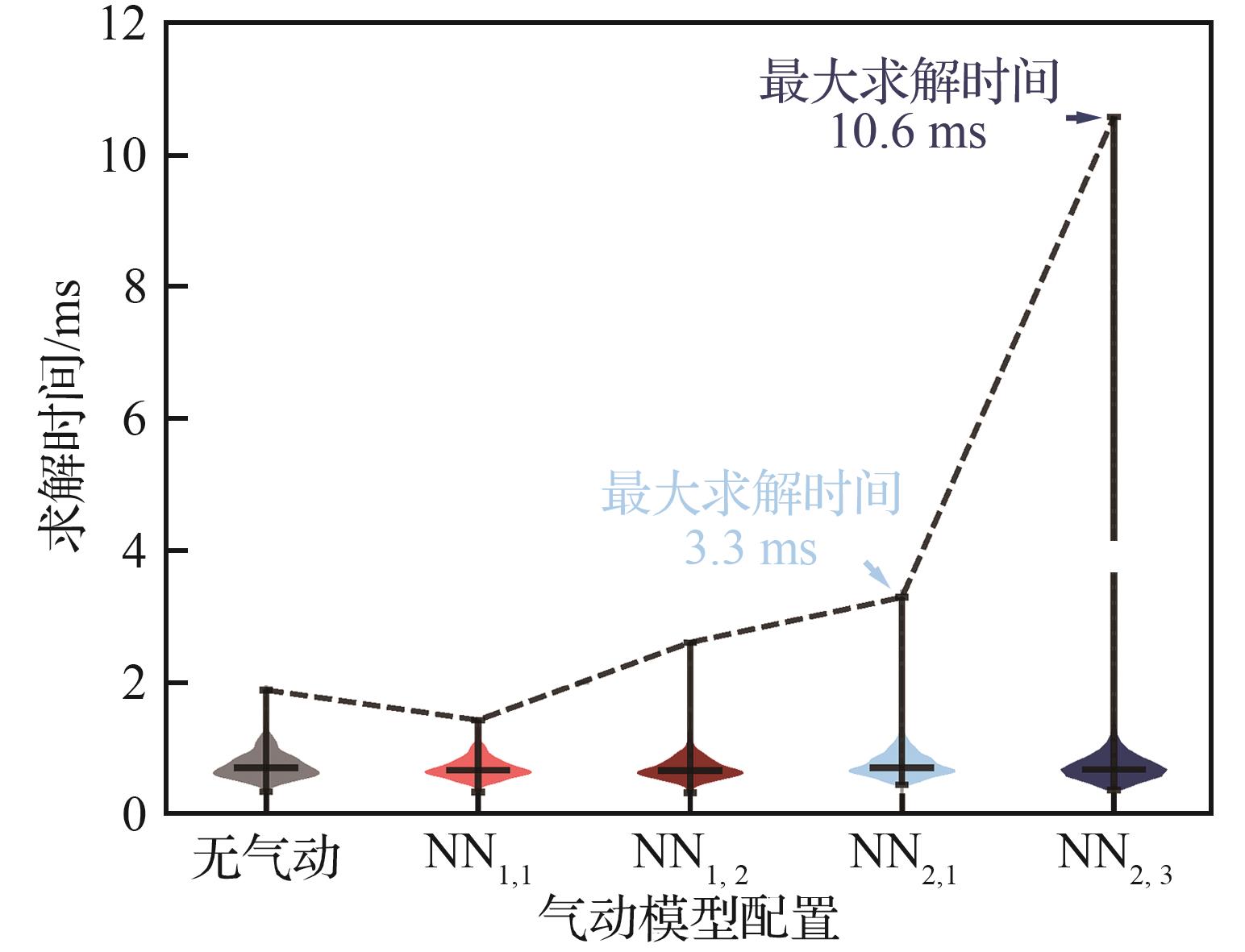
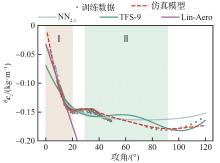
Fig.12
Comparison of aerodynamic models of different parametric structures
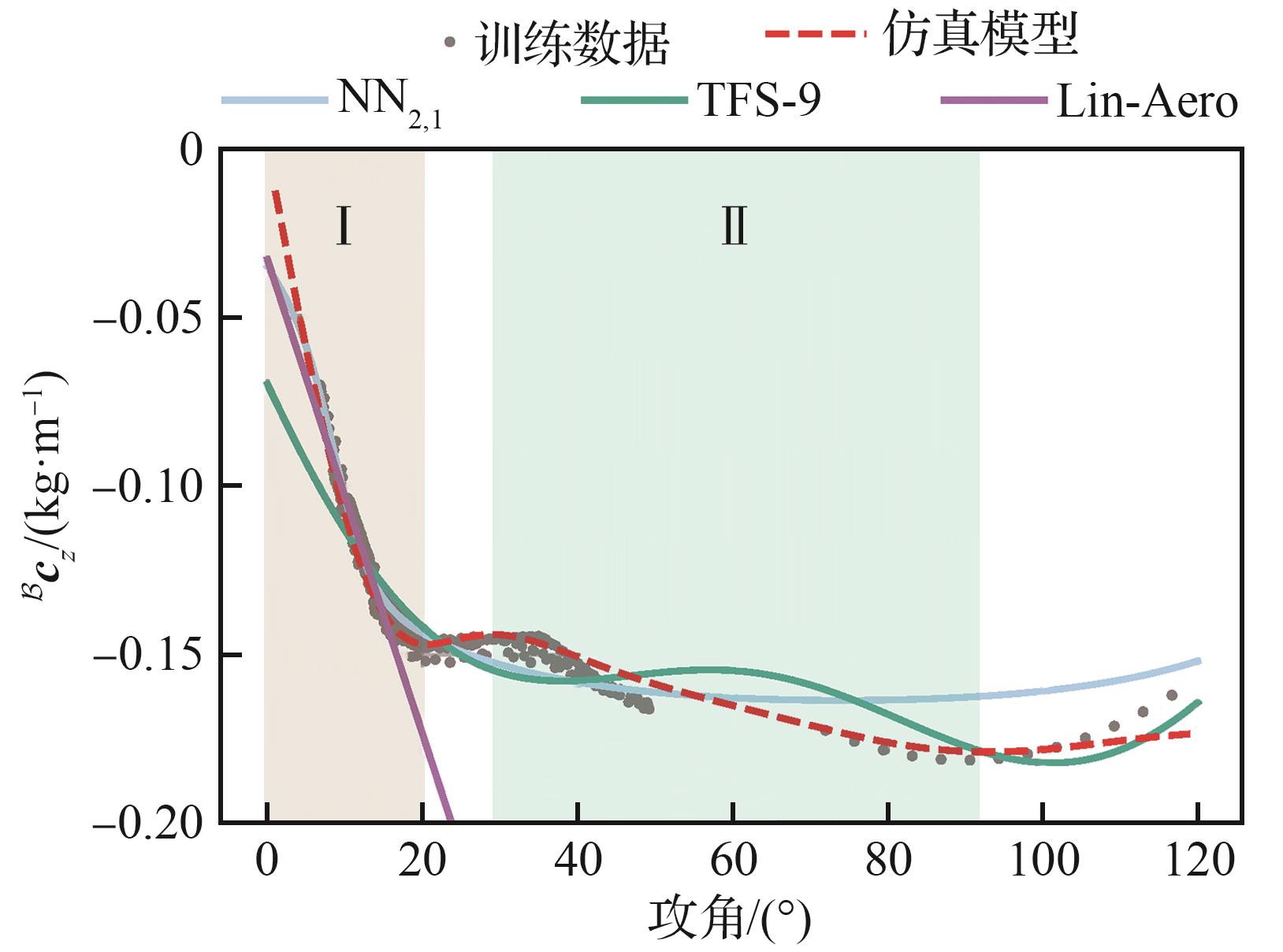

Fig.13
Comparison of trajectory tracking for models with different parametric structures
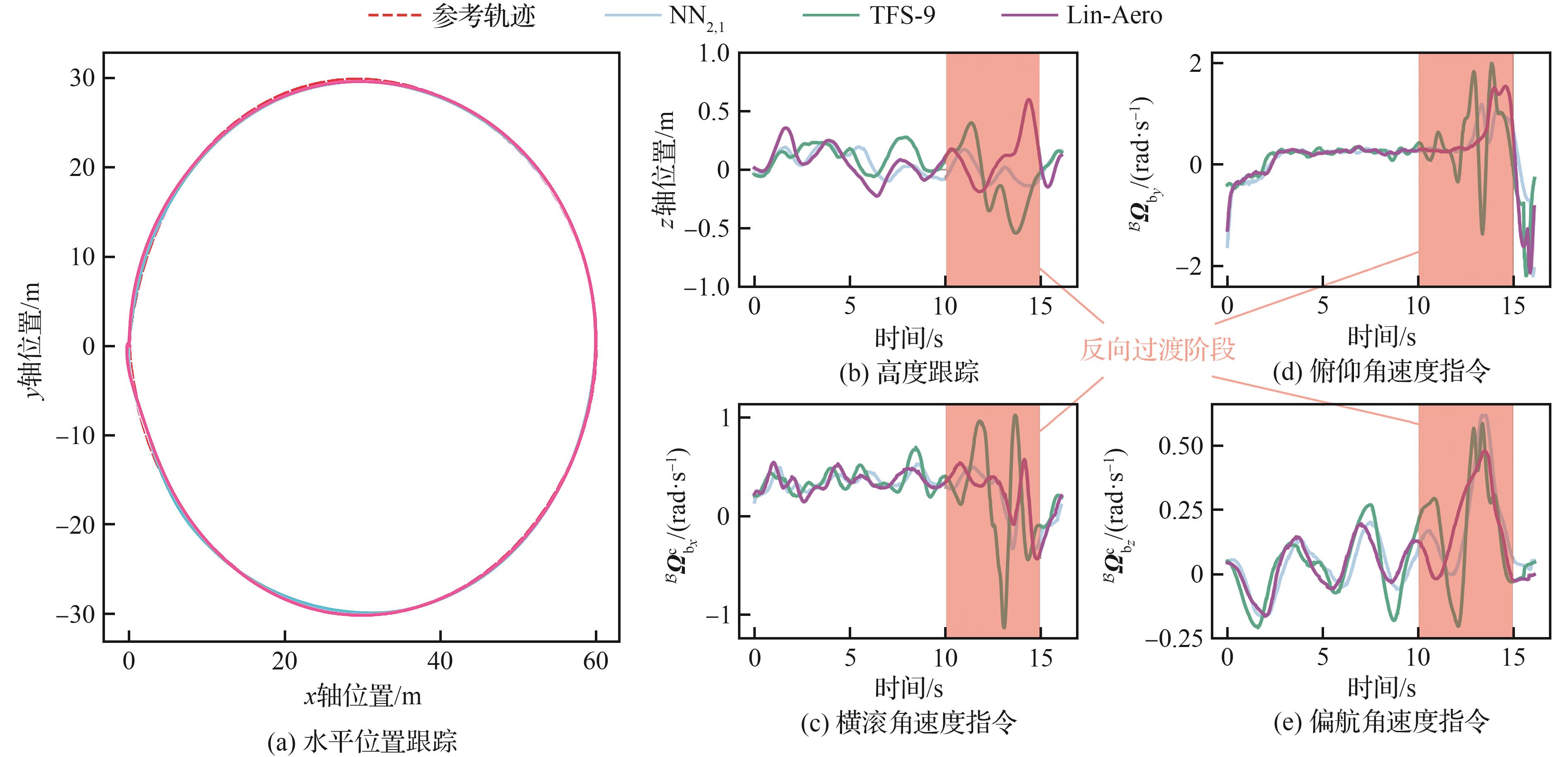
Table 2
Mean-variance analysis of trajectory tracking errors for models with different parametric structures
| 模型 | 水平位置均方误差均值/cm | 水平位置均方误差标准差/cm | 垂直位置均方误差均值/cm | 垂直位置均方误差标准差/cm | 最大位置误差均值/cm | 最大位置误差标准差/cm |
|---|---|---|---|---|---|---|
| 24.97 | 6.40 | 12.51 | 5.08 | 76.64 | 24.48 | |
| TFS-9 | 29.56 | 12.49 | 16.89 | 13.76 | 95.63 | 53.40 |
| Lin-Aero | 34.92 | 11.09 | 18.21 | 6.86 | 109.27 | 44.06 |
| [1] | 韦振鹏, 刘峰, 杨森. 垂直起降固定翼无人机发展现状与技术要点[J]. 飞机设计, 2024, 44(1): 5-13. |
| WEI Z P, LIU F, YANG S. Development and key technologies of vertical take-off and landing UAV with fixed wing[J]. Aircraft Design, 2024, 44(1): 5-13 (in Chinese). | |
| [2] | 王科雷, 周洲, 马悦文, 等. 垂直起降固定翼无人机技术发展及趋势分析[J]. 航空工程进展, 2022, 13(5): 1-13. |
| WANG K L, ZHOU Z, MA Y W, et al. Development and trend analysis of vertical takeoff and landing fixed wing UAV[J]. Advances in Aeronautical Science and Engineering, 2022, 13(5): 1-13 (in Chinese). | |
| [3] | ZHOU Y M, ZHAO H R, LIU Y L. An evaluative review of the VTOL technologies for unmanned and manned aerial vehicles[J]. Computer Communications, 2020, 149: 356-369. |
| [4] | DUCARD G J J, ALLENSPACH M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs[J]. Aerospace Science and Technology, 2021, 118: 107035. |
| [5] | KE Y J, WANG K L, CHEN B M. Design and implementation of a hybrid UAV with model-based flight capabilities[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(3): 1114-1125. |
| [6] | BAPST R, RITZ R, MEIER L, et al. Design and implementation of an unmanned tail-sitter[C]∥2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2015: 1885-1890. |
| [7] | RITZ R, D’ANDREA R. A global controller for flying wing tailsitter vehicles[C]∥2017 IEEE International Conference on Robotics and Automation (ICRA). New York: ACM, 2017: 2731-2738. |
| [8] | FRISON G, DIEHL M. HPIPM: A high-performance quadratic programming framework for model predictive control[J]. IFAC-PapersOnLine, 2020, 53(2): 6563-6569. |
| [9] | CARLOS B B, SARTOR T, ZANELLI A, et al. An efficient real-time NMPC for quadrotor position control under communication time-delay[C]∥2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV). Piscataway: IEEE Press, 2020: 982-989. |
| [10] | TORRENTE G, KAUFMANN E, FÖHN P, et al. Data-driven MPC for quadrotors[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 3769-3776. |
| [11] | SALZMANN T, KAUFMANN E, ARRIZABALAGA J, et al. Real-time neural MPC: deep learning model predictive control for quadrotors and agile robotic platforms[J]. IEEE Robotics and Automation Letters, 2023, 8(4): 2397-2404. |
| [12] | LI B Y, ZHOU W F, SUN J X, et al. Development of model predictive controller for a tail-sitter VTOL UAV in hover flight[J]. Sensors, 2018, 18(9): 2859. |
| [13] | ZHOU W F, LI B Y, SUN J X, et al. Position control of a tail-sitter UAV using successive linearization based model predictive control[J]. Control Engineering Practice, 2019, 91: 104125. |
| [14] | 曹煜琪, 付皓然, 高飞, 等. 基于MPCC的鸭翼尾座式垂直起降无人机轨迹跟踪控制算法[J]. 航空学报, 2023, 44(S2): 729950. |
| CAO Y Q, FU H R, GAO F, et al. Trajectory tracking control algorithm for canard-equipped tail-sitting vertical takeoff and landing UAV based on MPCC[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729950.. | |
| [15] | LU G Z, CAI Y X, CHEN N, et al. Trajectory generation and tracking control for aggressive tail-sitter flights[J]. International Journal of Robotics Research, 2024, 43(3): 241-280. |
| [16] | LYU X M, GU H W, WANG Y, et al. Design and implementation of a quadrotor tail-sitter VTOL UAV[C]∥2017 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2017: 3924-3930. |
| [17] | ZHANG F, LYU X M, WANG Y, et al. Modeling and flight control simulation of a quadrotor tailsitter VTOL UAV[C]∥AIAA Modeling and Simulation Technologies Conference. Reston: AIAA, 2017: 1561. |
| [18] | SÖPPER M, ZHANG J N, BÄHR N, et al. Required moment sets: enhanced controllability analysis for nonlinear aircraft models[J]. Applied Sciences, 2021, 11(8): 3456. |
| [19] | HAUSER J, HINDMAN R. Aggressive flight maneuvers[C]∥Proceedings of the 36th IEEE Conference on Decision and Control. Piscataway: IEEE Press, 1997: 4186-4191. |
| [20] | FLIESS M, LÉVINE J, MARTIN P, et al. Flatness and defect of non-linear systems: Introductory theory and examples[J]. International Journal of Control, 1995, 61(6): 1327-1361. |
| [21] | TAL E, KARAMAN S. Global incremental flight control for agile maneuvering of a tailsitter flying wing[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(12): 2332-2349. |
| [22] | SMEUR E J J, BRONZ M, DE CROON G C H E. Incremental control and guidance of hybrid aircraft applied to a tailsitter unmanned air vehicle[J]. Journal of Guidance, Control, and Dynamics, 2019, 43(2): 274-287. |
| [23] | GROS S, ZANON M, QUIRYNEN R, et al. From linear to nonlinear MPC: Bridging the gap via the real-time iteration[J]. International Journal of Control, 2020, 93(1): 62-80. |
| [24] | VERSCHUEREN R, FRISON G, KOUZOUPIS D, et al. Acados: A modular open-source framework for fast embedded optimal control[J]. Mathematical Programming Computation, 2022, 14(1): 147-183. |
| [25] | ANDERSSON J A E, GILLIS J, HORN G, et al. CasADi: a software framework for nonlinear optimization and optimal control[J]. Mathematical Programming Computation, 2019, 11(1): 1-36. |
| [26] | MACENSKI S, FOOTE T, GERKEY B, et al. Robot Operating System 2: Design, architecture, and uses in the wild[J]. Science Robotics, 2022, 7(66): eabm6074. |
| [27] | WANG Z P, ZHOU X, XU C, et al. Geometrically constrained trajectory optimization for multicopters[J]. IEEE Transactions on Robotics, 2022, 38(5): 3259-3278. |
| [1] | Lixiong ZHENG, Zhe CHEN, Xin WANG, Qijun ZHAO. Prediction of whirl flutter boundary for tiltrotor aircraft based on BPNN with adaptive data [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732159-732159. |
| [2] | Zhuangzhuang CUI, Binwu REN, Xu ZHOU, Zhe CHEN, Guoqing ZHAO. Brownout suppression optimization of helicopter landing trajectory parameters under real control [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732186-732186. |
| [3] | Jiong HE, Binwu REN, Siliang DU, Yousong XU, Bo WANG. Adaptive attitude control for tilt-quadrotor UAV based on ADRC-RBF [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732189-732189. |
| [4] | Tao ZHANG, Pan LI, Zixu WANG, Zhenhua ZHU. Design of reward functions for helicopter attitude control in reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732184-732184. |
| [5] | Ronghai KOU, Wenbo LI, Qingqing DANG, Jinjin XIE. Fault diagnosis of spacecraft attitude control system driven by data and model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732259-732259. |
| [6] | Bichen HU, Liangliang HU, Yuxi LIU, Shujun TAN. Aerodynamic parameter identification of launch vehicle based on offline learning and online correction [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732407-732407. |
| [7] | Haipeng CHEN, Wenxing FU, Jie YAN. Fault diagnosis of thrust offset loss of launch vehicle based on AGABP neural network [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 231148-231148. |
| [8] | Mou CHEN, Zhengguo HUANG, Yaohua SHEN, Fan LIU. Overview of composite anti-disturbance control technology of advanced vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531303-531303. |
| [9] | Zhichun YANG, Te YANG. Physical embedded neural network model and method for dynamic load identification [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(5): 531450-531450. |
| [10] | Xudong LI, Wei ZHONG, Zhen WANG, Tongguang WANG, Jinlong LI. Ratio of propeller thrust to total thrust of ducted propellers [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 230829-230829. |
| [11] | Yongze MIAO, Xinggang FAN, Dawei LI, Wei SUN, Lihao HUANG, Shengqiao HAO, Haiyang FANG, Ronghai QU, Yancheng YOU. Research advances in electrical propulsion systems for electric vertical take-off and landing aircrafts: A comprehensive review [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 332000-332000. |
| [12] | Yubin LU, Xiaohua NIE, Zhen WU. A residual stiffness prediction approach for carbon fiber reinforced composite materials based on interpretable machine learning algorithms [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(21): 532249-532249. |
| [13] | Jiakun FAN, Junqiang AI, Ningjuan DONG, Jiakuan XU, Lei QIAO, Junqiang BAI. Stationary crossflow induced transition prediction method for supersonic swept-wing based on convolutional neural networks [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(20): 532012-532012. |
| [14] | Yutong WANG, Xiao LUO, Hongyang LIU, Chao SONG, Ying ZHAO, Zhu ZHOU. Sonic boom prediction of supersonic passenger aircraft based on multi-fidelity deep neural network [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(20): 531936-531936. |
| [15] | Chenhao ZHAO, Dewei WU, Jing HE, Qian WU. A semantic feature matching algorithm for UAV visual pose estimation [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(2): 330406-330406. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341