Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (15): 329652.doi: 10.7527/S1000-6893.2023.29652
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Zhaojun GU1, Huan ZHAO1,2, Jialiang WANG2( ), Liuyang NIE1,2
), Liuyang NIE1,2
Received:2023-09-26
Revised:2023-11-05
Accepted:2023-12-27
Online:2024-08-15
Published:2024-01-11
Contact:
Jialiang WANG
E-mail:jl-wang@cauc.edu.cn
Supported by:CLC Number:
Zhaojun GU, Huan ZHAO, Jialiang WANG, Liuyang NIE. Automatic landing method for quad-rotor helicopter based on Markov decision process[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 329652.

Fig.1
Dynamics model of quad-rotor helicopter
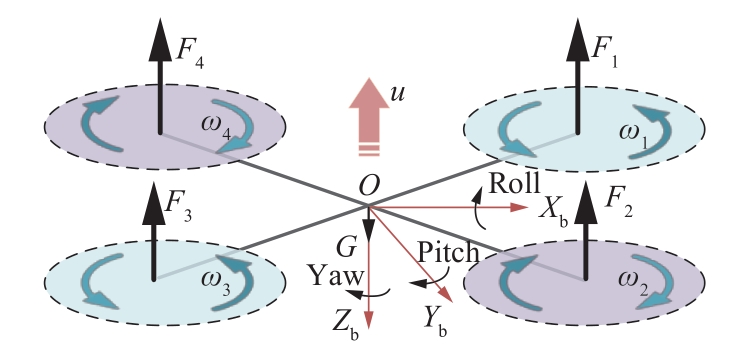
Fig.2
Aircraft coordinate diagram
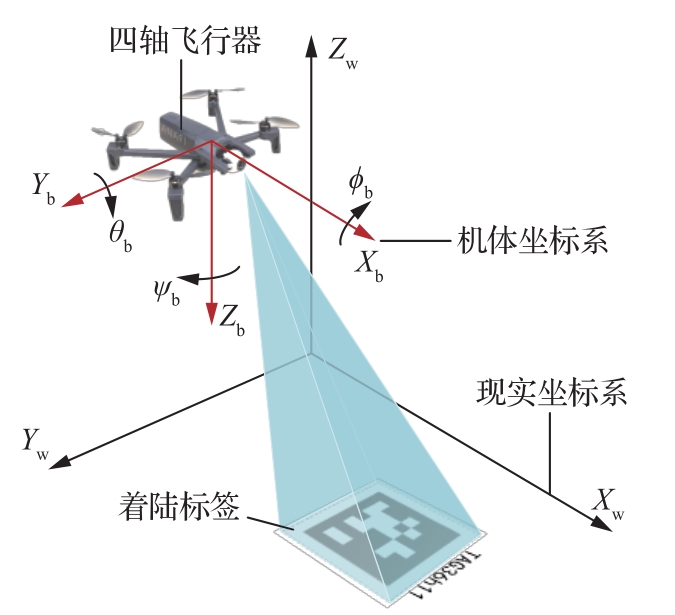

Fig.3
System workflow
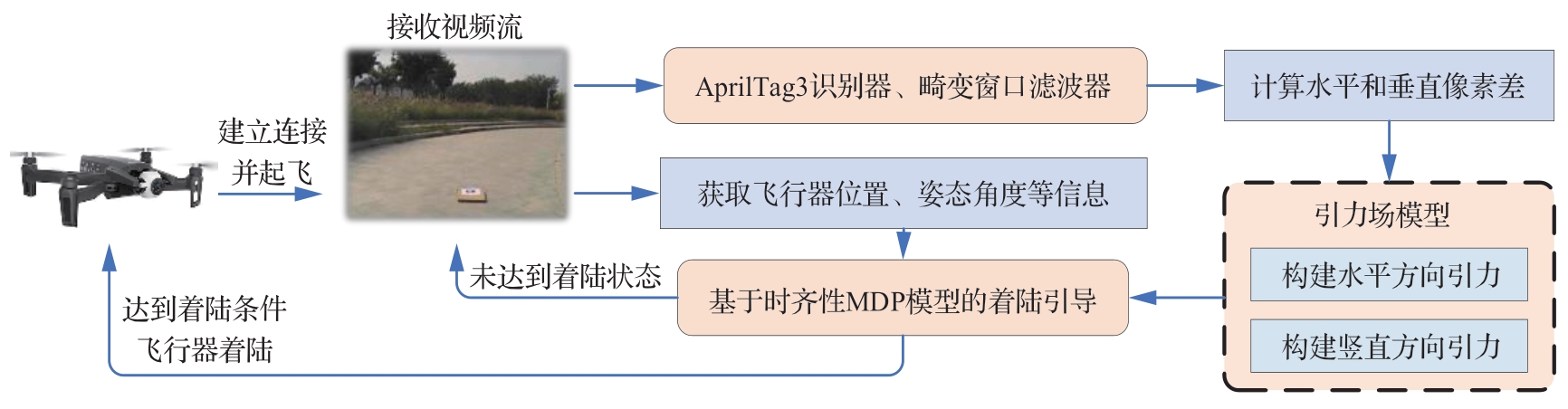
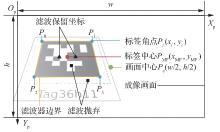
Fig.4
Median filter based on distortion window
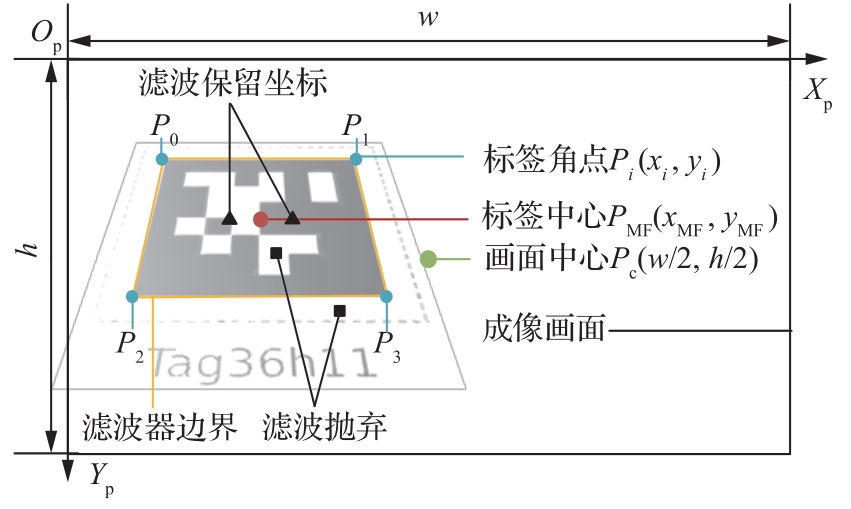
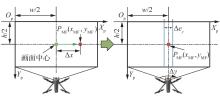
Fig.5
Alignment process of yaw direction
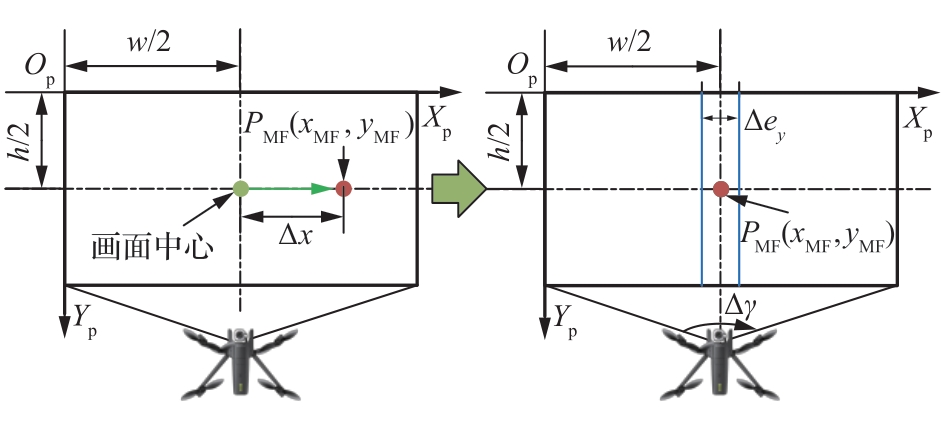
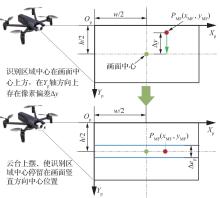
Fig.6
Pitch angle alignment process of gimbal
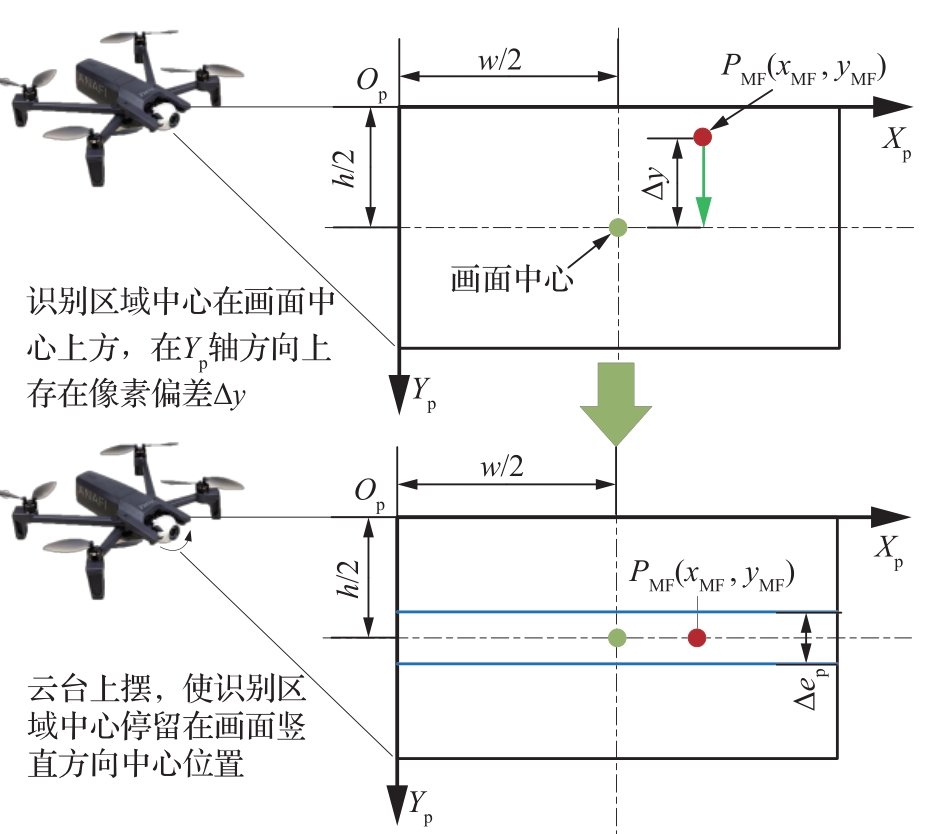
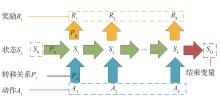
Fig.7
Traditional Markov decision process
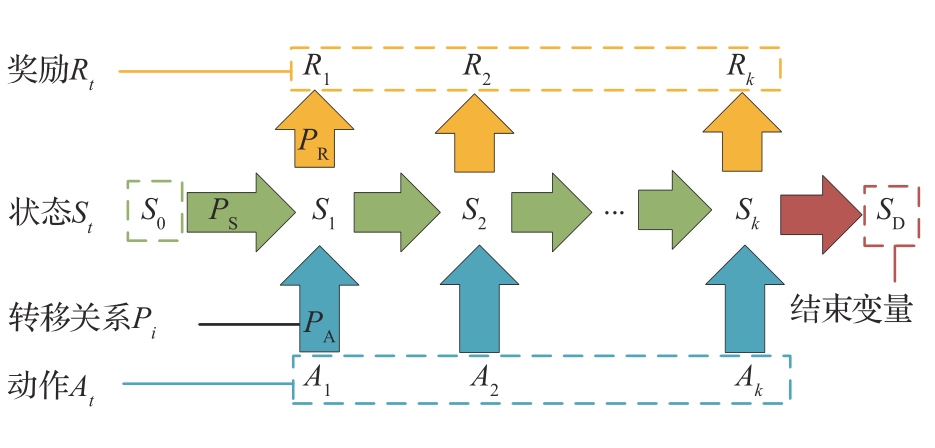
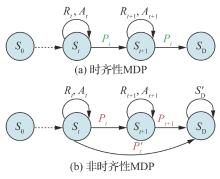
Fig.8
Time-aligned difference of MDP
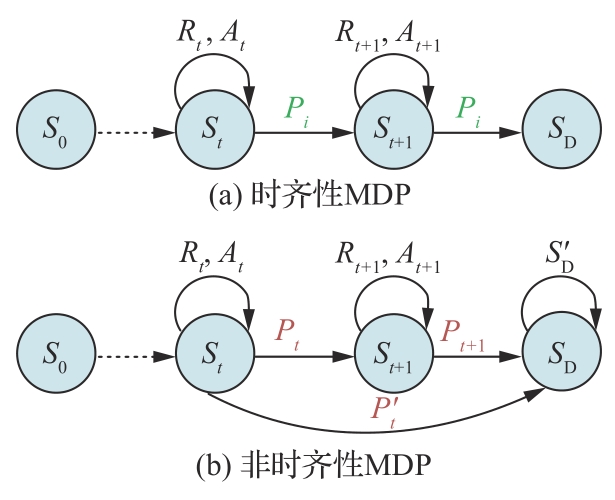
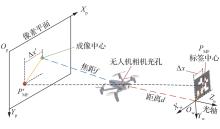
Fig.9
Estimation of target distance
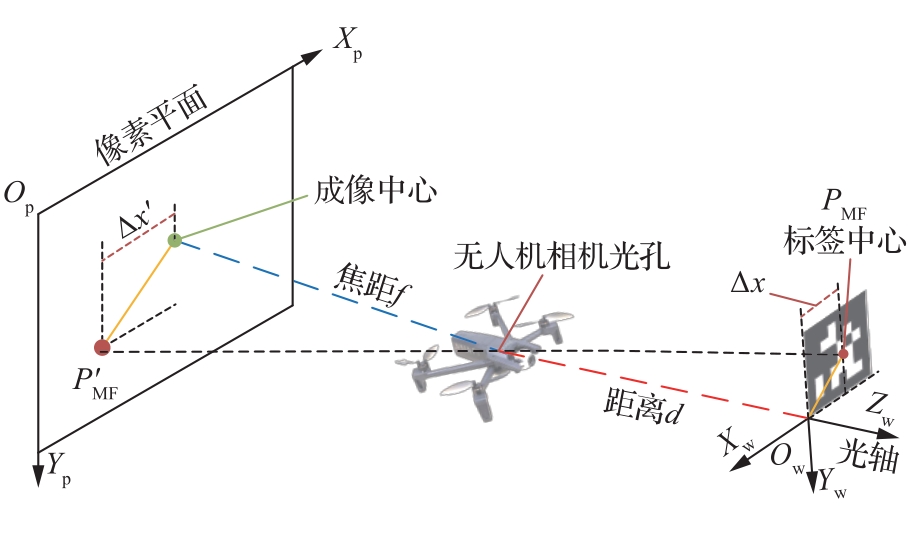

Fig.10
Landing approach based on time-aligned MDP
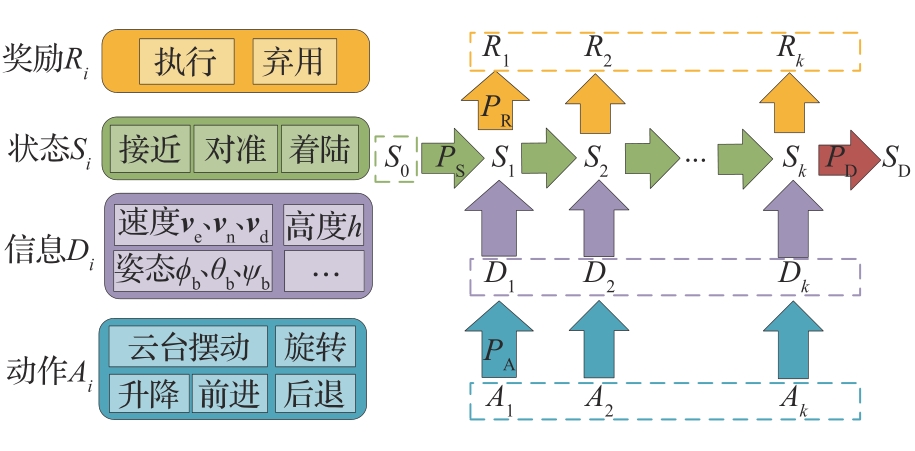

Fig.11
Parrot ANAFI quad-rotor helicopter platform

Fig.12
Alignment process of aircraft after takeoff from position A (on the right side of target)
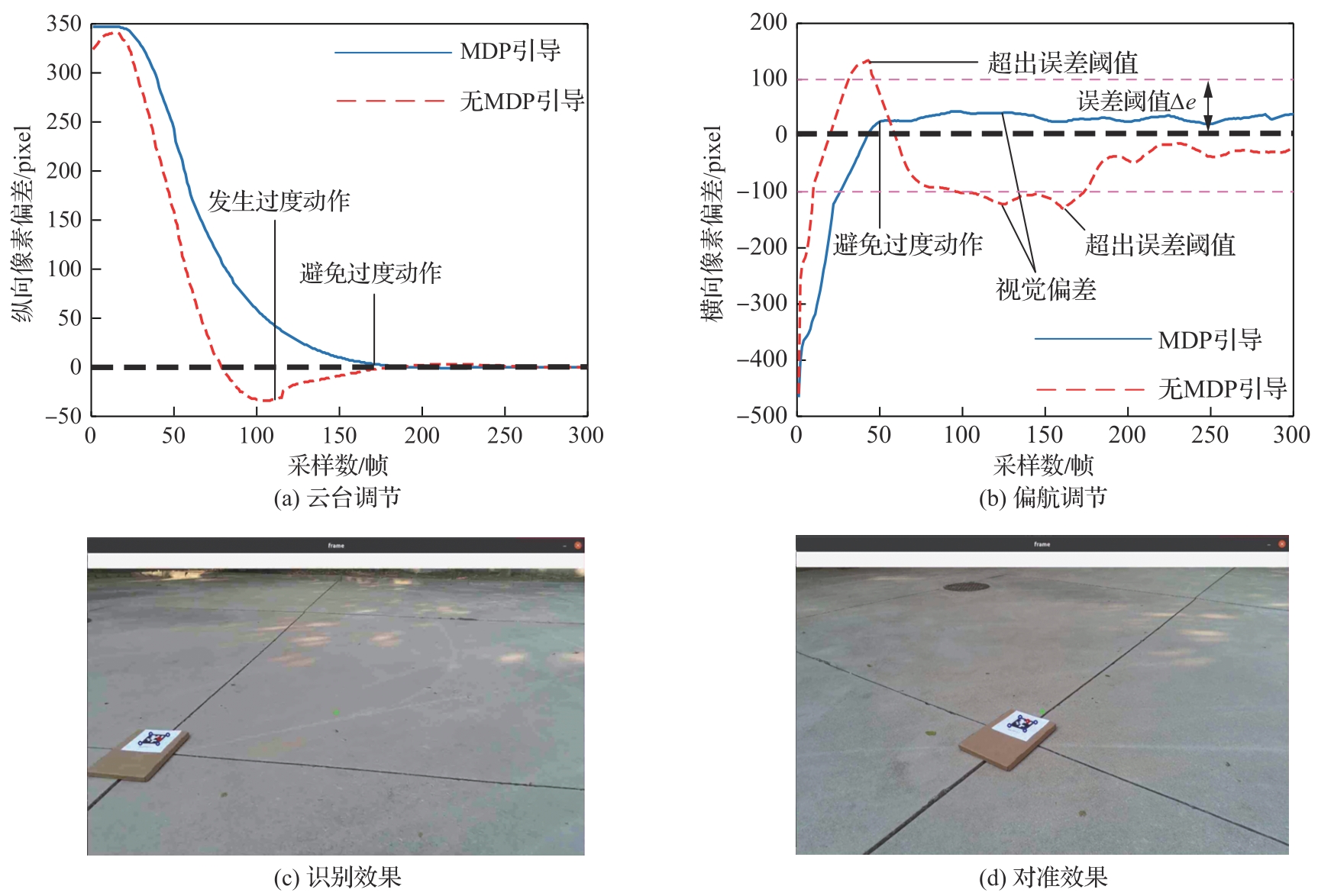
Fig.13
Alignment process of aircraft after takeoff from position B (in front of target)
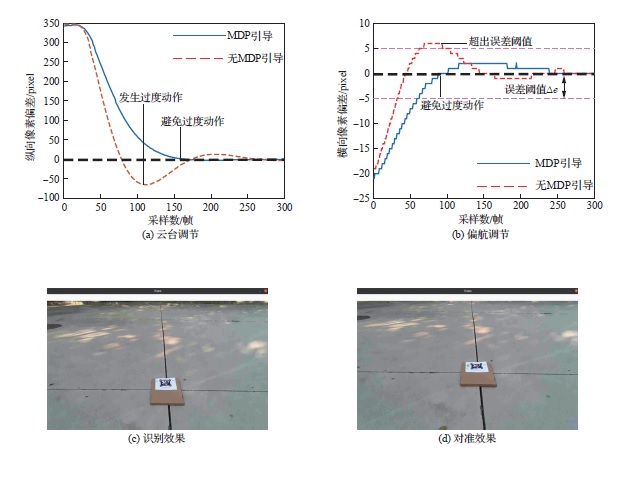
Fig.14
Alignment process of aircraft after takeoff from position C (on the left side of target)
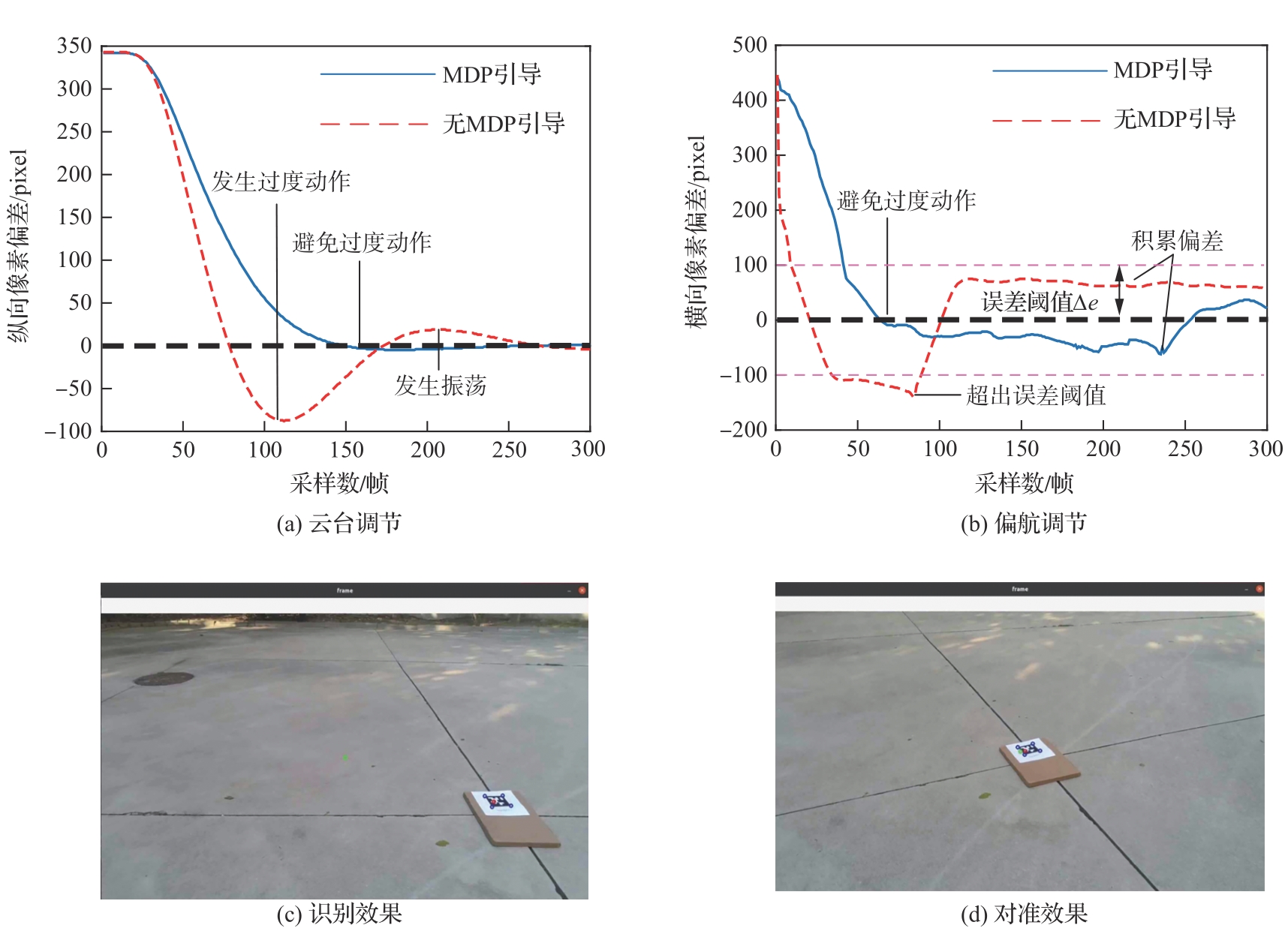

Fig.15
Plots of landing experiment in visual range
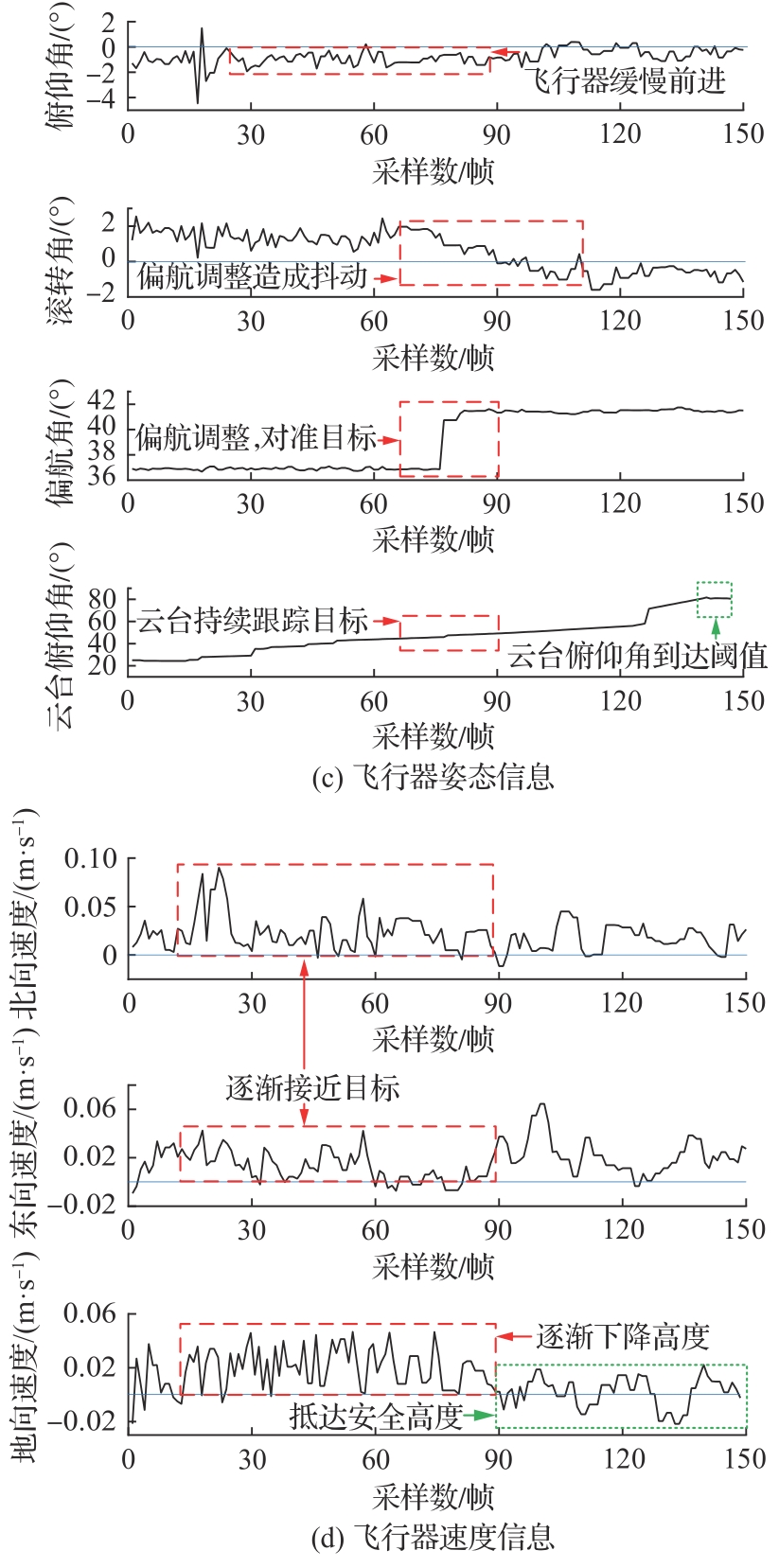
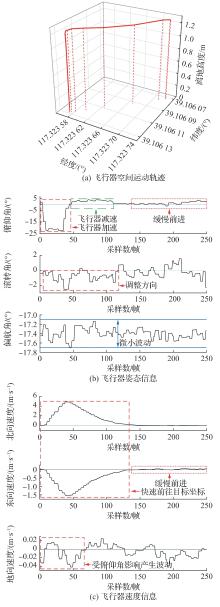
Fig.16
Landing guidance based on GPS
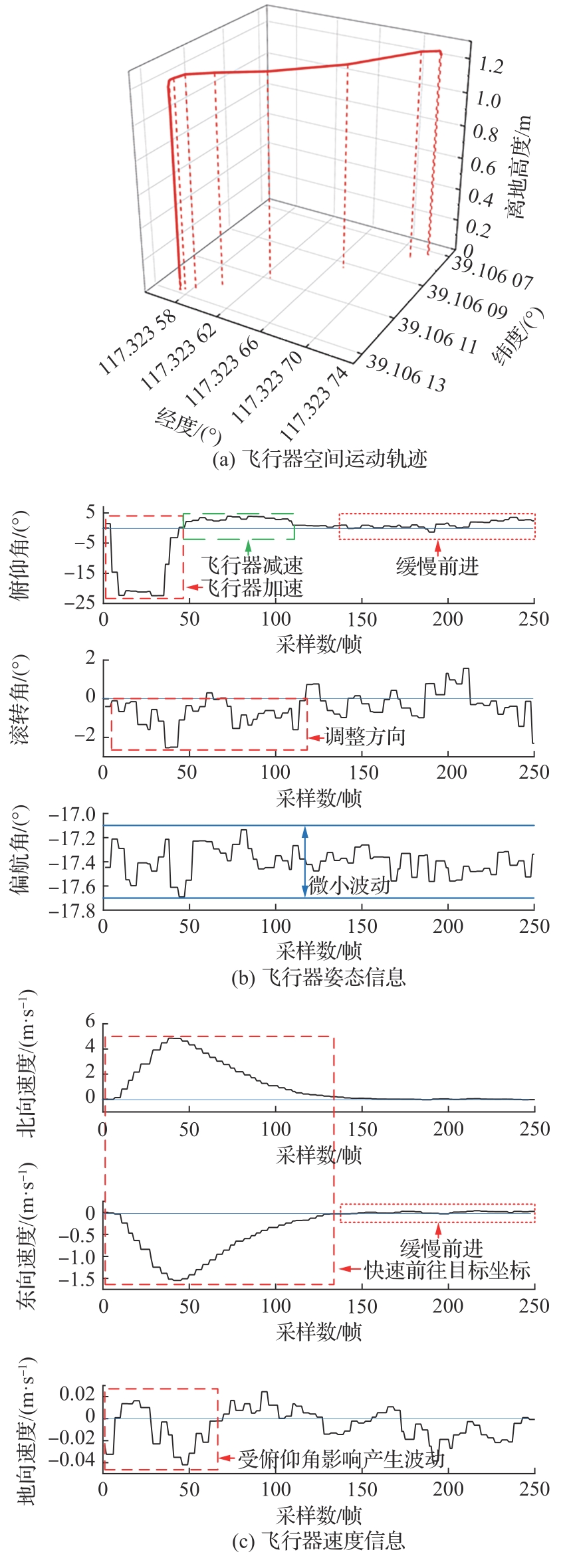
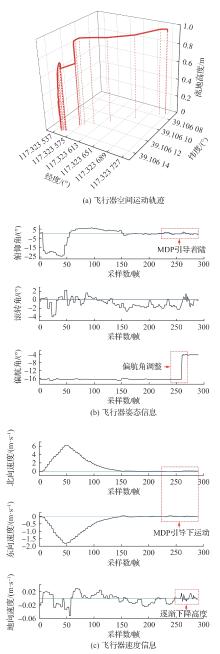
Fig.17
Landing guidance combined GPS and MDP
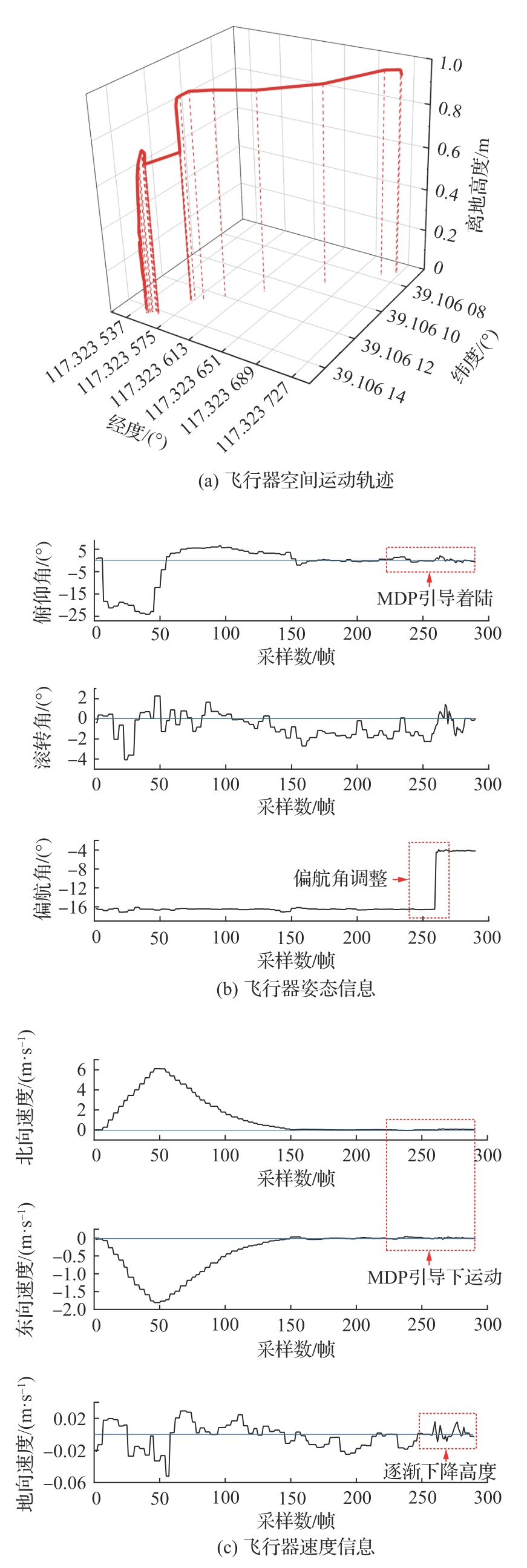
Table 1
Landing results beyond visual range
| 实验情景 | 着陆结果 | 横向偏差 Δx/cm | 纵向偏差 Δy/cm | 平均直线 偏差/cm |
|---|---|---|---|---|
| GPS着陆 | 结果1 | 52.8 | 120.6 | 100.49 |
| 结果2 | 30.6 | 87.2 | ||
| 结果3 | 48.7 | 60.2 | ||
| MDP着陆 | 结果1 | 5.8 | 11.7 | 10.24 |
| 结果2 | 7.1 | 8.8 | ||
| 结果3 | 3.5 | 5.3 |
Table 2
Comparison of landing methods[12,24-26]
| 方法 | 硬件要求 | 着陆耗时/s | 位置精度/cm | 环境适应性 |
|---|---|---|---|---|
| 文献[ | 图形处理器 | 11.94~19.28 | < 20 | 特定平台着陆 |
| 文献[ | 红外信标探测器 | 17.50~41.50 | < 25 | 红外信标着陆 |
| 文献[ | 高精度磁源检测器 | 25.00~27.00 | < 5 | 磁源平台着陆 |
| 文献[ | 单目相机 | 12.50~15.00 | < 50 | 室外靶标着陆 |
| 所提方法:使用单一AprilTag标签作为着陆平台,设计基于数据融合的时齐性MDP引导飞行器自动着陆,环境适应性强,着陆精度较好 | 单目相机 | 15.60~24.80 | < 11 | 室外靶标着陆 |
| 1 | 张良阳, 李占科, 韩海洋. 微型无人机栖息设计技术综述[J]. 航空学报, 2023, 44(12): 027573. |
| ZHANG L Y, LI Z K, HAN H Y. A review of perching technology of micro-UAV[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(12): 027573 (in Chinese). | |
| 2 | SONG H Y, YU J C, QIU J T, et al. Multi-UAV disaster environment coverage planning with limited-endurance[C]∥ 2022 International Conference on Robotics and Automation. Piscataway: IEEE Press, 2022: 10760-10766. |
| 3 | ZHU X N. Analysis of military application of UAV swarm technology[C]∥ 2020 3rd International Conference on Unmanned Systems. Piscataway: IEEE Press, 2020: 1200-1204. |
| 4 | SAH B, GUPTA R, BANI-HANI D. Analysis of barriers to implement drone logistics[J]. International Journal of Logistics Research and Applications, 2021, 24(6): 531-550. |
| 5 | MERHEB A R, NOURA H, BATEMAN F. Emergency control of AR drone quadrotor UAV suffering a total loss of one rotor[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(2): 961-971. |
| 6 | 倪静, 马波, 杨朝旭, 等. 视觉/惯性着陆组合引导方法设计与试验[J]. 航空学报, 2023, 44(S1): 727636. |
| NI J, MA B, YANG Z X, et al. Design and test of visual-inertial integrated method for landing guidance[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727636 (in Chinese). | |
| 7 | SUPRIYONO H, Design AKHARA A., building and performance testing of GPS and computer vision combination for increasing landing precision of quad-copter drone[J]. Journal of Physics: Conference Series, 2021, 1858(1): 012074. |
| 8 | TRUONG N Q, NGUYEN P H, NAM S H, et al. Deep learning-based super-resolution reconstruction and marker detection for drone landing[J]. IEEE Access, 2019, 7: 61639-61655. |
| 9 | NEPAL U, ESLAMIAT H. Comparing YOLOv3, YOLOv4 and YOLOv5 for autonomous landing spot detection in faulty UAVs[J]. Sensors, 2022, 22(2): 464. |
| 10 | 唐进, 梁彦刚, 白志会, 等. 基于DQN的旋翼无人机着陆控制算法[J]. 系统工程与电子技术, 2023, 45(5): 1451-1460. |
| TANG J, LIANG Y G, BAI Z H, et al. Landing control algorithm of rotor UAV based on DQN[J]. Systems Engineering and Electronics, 2023, 45(5): 1451-1460 (in Chinese). | |
| 11 | NIU G C, YANG Q K, GAO Y F, et al. Vision-based autonomous landing for unmanned aerial and ground vehicles cooperative systems[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 6234-6241. |
| 12 | 赵燕伟, 张健, 周仙明, 等. 基于视觉-磁引导的无人机动态跟踪与精准着陆[J]. 浙江大学学报(工学版), 2021, 55(1): 96-108. |
| ZHAO Y W, ZHANG J, ZHOU X M, et al. Dynamic tracking and precise landing of UAV based on visual magnetic guidance[J]. Journal of Zhejiang University (Engineering Science), 2021, 55(1): 96-108 (in Chinese). | |
| 13 | 刘晨阳, 吴大伟, 郭一泽, 等. 不确定强耦合下四旋翼姿态鲁棒自适应控制[J]. 航空学报, 2023, 44(S1): 727645. |
| LIU C Y, WU D W, GUO Y Z, et al. Robust adaptive attitude control of quadrotor with uncertain strong coupling[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727645 (in Chinese). | |
| 14 | KALLWIES J, FORKEL B, WUENSCHE H J. Determining and improving the localization accuracy of AprilTag detection[C]∥ 2020 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2020: 8288-8294. |
| 15 | KALAITZAKIS M, CAIN B, CARROLL S, et al. Fiducial markers for pose estimation: Overview, applications and experimental comparison of the ARTag, AprilTag, ArUco and STag markers[J]. Journal of Intelligent & Robotic Systems, 2021, 101(4): 1-26. |
| 16 | 王羿, 叶辉, 杨晓飞. 基于无源性与势场法的四旋翼避障与位置控制[J]. 航空学报, 2023, 44(S1): 727492. |
| WANG Y, YE H, YANG X F. A position control and obstacle avoidance method for quadrotor via approach based on passivity and artificial potential filed[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727492 (in Chinese). | |
| 17 | OROZCO-ROSAS U, MONTIEL O, SEPÚLVEDA R. Mobile robot path planning using membrane evolutionary artificial potential field[J]. Applied Soft Computing, 2019, 77: 236-251. |
| 18 | FENG Z K, HUANG M X, WU D, et al. Multi-agent reinforcement learning with policy clipping and average evaluation for UAV-assisted communication Markov game[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(12): 14281-14293. |
| 19 | ROY V. Convergence diagnostics for Markov chain Monte Carlo[J]. Annual Review of Statistics and Its Application, 2020, 7: 387-412. |
| 20 | KALLUS N, UEHARA M. Double reinforcement learning for efficient off-policy evaluation in Markov decision processes[J]. The Journal of Machine Learning Research, 2020, 21(1): 6742-6804. |
| 21 | PARK K, NISHIYAMA M, NAKADA N, et al. Effect of the martensite distribution on the strain hardening and ductile fracture behaviors in dual-phase steel[J]. Materials Science and Engineering: A, 2014, 604: 135-141. |
| 22 | GUSSEV M N, BUSBY J T, BYUN T S, et al. Twinning and martensitic transformations in nickel-enriched 304 austenitic steel during tensile and indentation deformations[J]. Materials Science and Engineering: A, 2013, 588: 299-307. |
| 23 | JUAREZ-SALAZAR R, ZHENG J, DIAZ-RAMIREZ V H. Distorted pinhole camera modeling and calibration[J]. Applied Optics, 2020, 59(36): 11310-11318. |
| 24 | RODRIGUEZ-RAMOS A, SAMPEDRO C, BAVLE H, et al. A deep reinforcement learning strategy for UAV autonomous landing on a moving platform[J]. Journal of Intelligent & Robotic Systems, 2019, 93(1/2): 351-366. |
| 25 | BADAKIS G, KOUTSOUBELIAS M, LALIS S. Robust precision landing for autonomous drones combining vision-based and infrared sensors[C]∥ 2021 IEEE Sensors Applications Symposium. Piscataway: IEEE Press, 2021: 1-6. |
| 26 | LI Z, CHEN Y, LU H, et al. UAV autonomous landing technology based on AprilTags vision positioning algorithm[C]∥ 2019 Chinese Control Conference. Piscataway: IEEE Press, 2019: 8148-8153. |
| [1] | Yingjie SHI, Binchao LIU, Songsong LU, Liang CHEN, Hai SHANG, Rui BAO. Neural network model for wing strain-load relationship based on fusion of real and virtual data [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(19): 530921-530921. |
| [2] | Yiwei HUANG, Yibin GENG, Tianhe GAO, Xuanwei HU, Yuan WANG, Hongyan MA, Kuo TIAN. Digital twin driven high precision reconstruction method for full-field deformation of structure [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(19): 530967-530967. |
| [3] | Chengjie GUO, Dian XU, Jinbao LI, Chaoyu CHENG, Shuochang GUO, Rui LI. Stress characterization of high-temperature digital image correlation experiments based on a data fusion-knowledge transfer method [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(19): 531574-531574. |
| [4] | Pengfei WANG, Lifang ZENG, Xueming SHAO, Jun LI. Multi-source data fusion modeling method for aerodynamic load of aircraft wing based on pre-training and fine-tuning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(19): 532297-532297. |
| [5] | Ligong LI, Chao ZHANG, Jingting SU. Distributed fusion technology for multi-source landing guidance information [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531461-531461. |
| [6] | Xianchao MENG, Jun TAO. An airfoil inverse design method based on target testing conditional generative adversarial network [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 631182-631182. |
| [7] | Dengfeng HU, Yu XIANG, Jun ZHANG, Jiachen YANG, Wenyong WANG. Multi-source data fusion method based on radial basis function generative adversarial network [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 631478-631478. |
| [8] | Hua YANG, Shusheng CHEN, Zhenghong GAO, Quanfeng JIANG, Wei ZHANG. Rotor aerodynamic data fusion based on Bayesian framework [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(8): 128960-128960. |
| [9] | Kuo TIAN, Zhiyong SUN, Zengcong LI. High-precision digital twin method for structural static test monitoring [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 429134-429134. |
| [10] | Hailang SONG, Jiandong ZHANG, Guoqing SHI, Qiming YANG, Yaozhong ZHANG. Comprehensive evaluation techniques and methods for flight test of avionics fire control system [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529687-529687. |
| [11] | Fan ZHANG, Wei CONG, Runcao TIAN, Peng WANG. Heterogeneous data fusion and reliability analysis based on two-layer variable weights [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(22): 230297-230297. |
| [12] | Yi WANG, Hui YE, Xiaofei YANG. A position control and obstacle avoidance method for quadrotor via approach based on passivity and artificial potential filed [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727492-727492. |
| [13] | Huaijie ZHANG, Jingya MA, Haoyuan LIU, Pin GUO, Huichao DENG, Kun XU, Xilun DING. Indoor positioning technology of multi⁃rotor flying robot based on visual-inertial fusion [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 426964-426964. |
| [14] | YANG Mingyue, SHOU Yingxin, TANG Yong, LIU Chang, XU Bin. Multi-quadrotor UAVs formation maintenance and collision avoidance control [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S1): 726913-726913. |
| [15] | CAO Ming, WANG Peng, ZUO Hongfu, ZENG Haijun, SUN Jianzhong, YANG Weidong, WEI Fang, CHEN Xuefeng. Current status, challenges and opportunities of civil aero-engine diagnostics & health management Ⅱ: Comprehensive off-board diagnosis, life management and intelligent condition based MRO [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 625574-625574. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341