ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (1): 326315.doi: 10.7527/S1000-6893.2021.26315
Previous Articles Next Articles
Zikang SU1( ), Zhongnan XU1, Chuntao LI1, Haitong CHEN1, Honglun WANG2
), Zhongnan XU1, Chuntao LI1, Haitong CHEN1, Honglun WANG2
Received:2021-09-02
Revised:2021-10-11
Accepted:2021-11-25
Online:2023-01-15
Published:2021-12-01
Contact:
Zikang SU
E-mail:zk_su@nuaa.edu.cn
Supported by:CLC Number:
Zikang SU, Zhongnan XU, Chuntao LI, Haitong CHEN, Honglun WANG. Modeling and docking control of UAV aerial recovery in form of telescopic boom[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 326315.
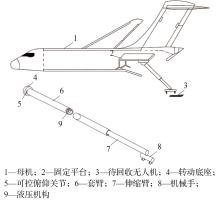
Fig. 1
Structure diagram of telescopic boom aerial recovery device

Fig. 2
Diagram of joints coordinate system of telescopic boom


Fig. 3
Grid division results of telescopic boom and outflow field calculation domain at ξ=0°,δ=36°,Δl3=3.5 m

Table 1
Magnitude of flow in cartesian coordinates
| 偏航角/(°) | 俯仰角/(°) | ||
|---|---|---|---|
| 42 | 48 | 54 | |
| 0 | |||
| 6 | |||
| 12 | |||
| 18 | |||
| 24 | |||
| 30 | |||
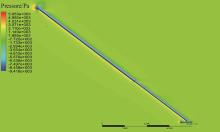
Fig. 4
Pressure cloud diagram of calculated results at ξ=0°,δ=36°,Δl3=3.5 m
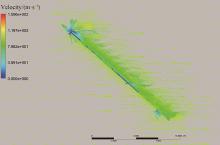
Fig. 5
Velocity vector diagram of calculated results at ξ=0°,δ=36°,Δl3=3.5 m
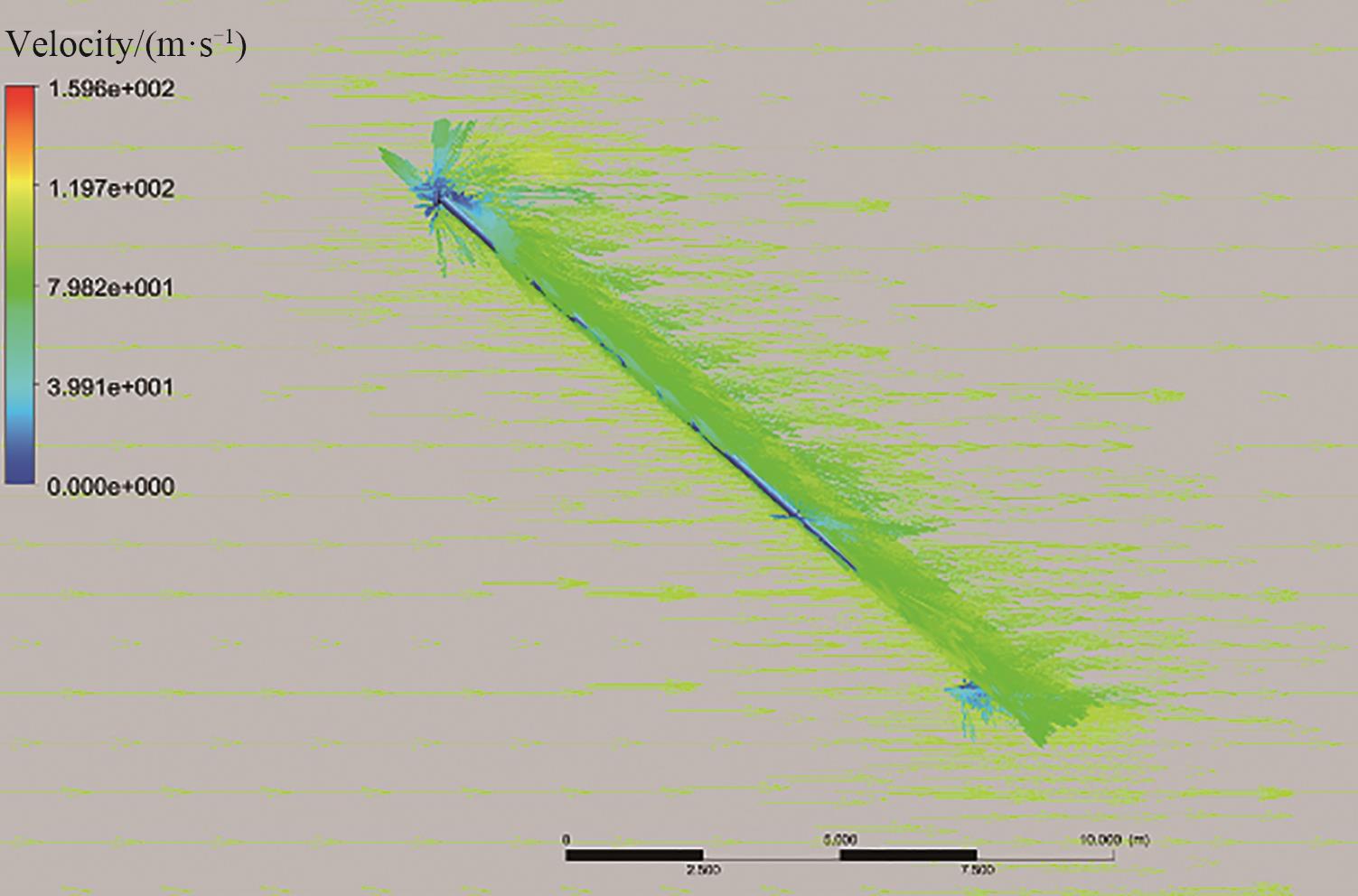

Fig. 6
Surface diagram of variation of resistance of telescopic boom with pitch and yaw angle at Δl3=3.5 m
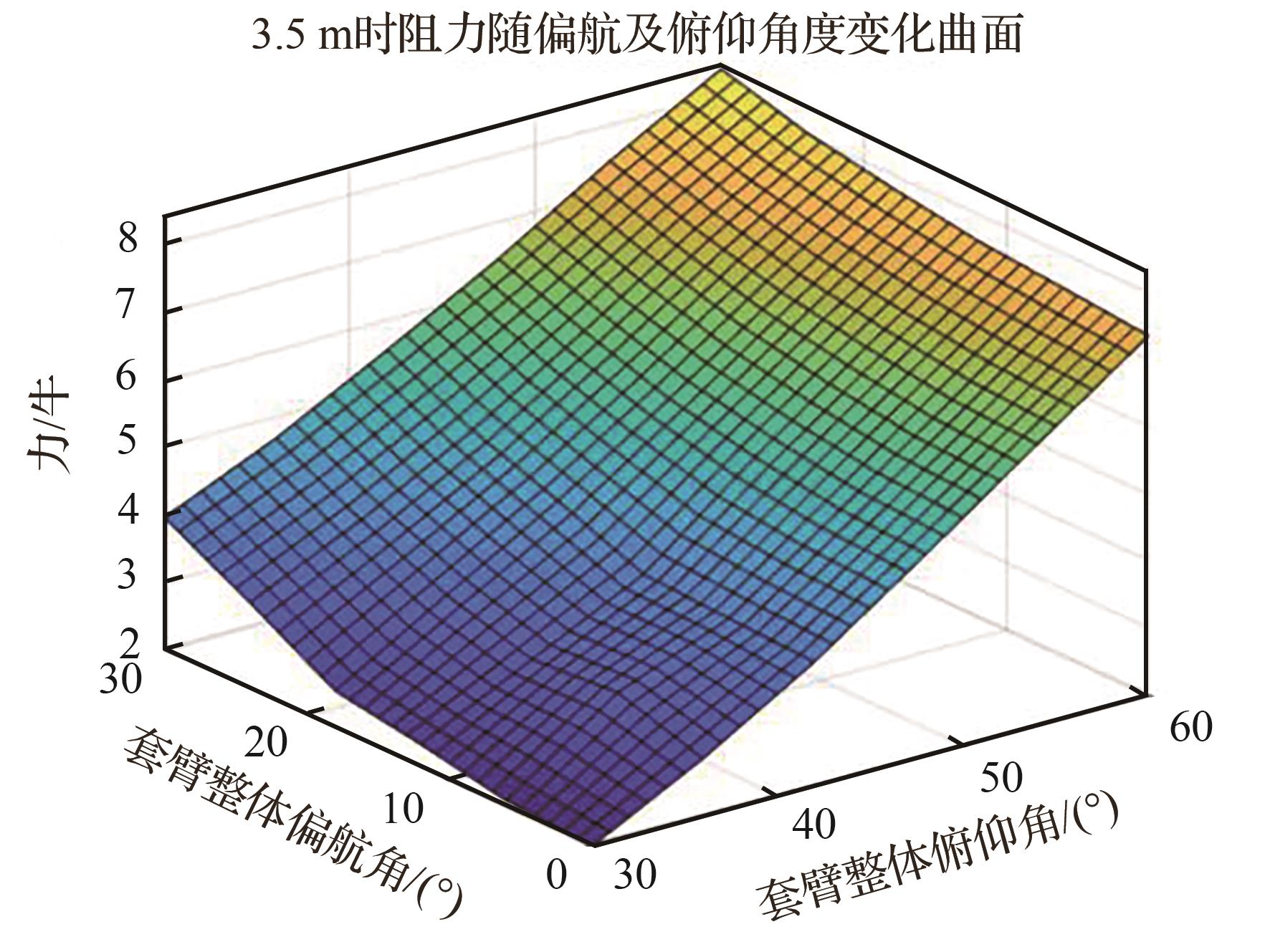
Fig. 7
Nonsingular fast terminal sliding mode control method of telescopic boom

Table 2
Parameters of each part of telescopic boom
| 部件名称 | 长度/m | 半径/m | 质量/kg |
|---|---|---|---|
| 转动底座 | 0.1 | 0.15 | 30 |
| 套臂 | 8.7 | 0.10 | 250 |
| 伸缩臂 | 8.3 | 0.08 | 170 |
| 机械手 | 25 |
Table 3
Parameters of telescopic boom control loop
| 控制方法 | 参数 | |
|---|---|---|
| ADRC | ESO | |
| 控制器 | ||
| NFTSMC | NFTSMO | |
| 指令滤波 | ||
| 控制器 | ||
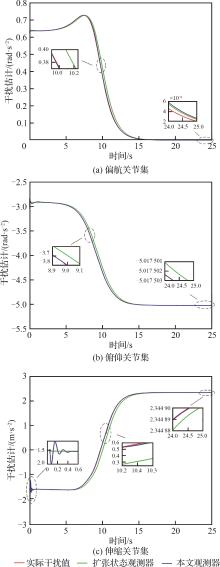
Fig. 8
Estimation of lumped disturbances of telescopic boom
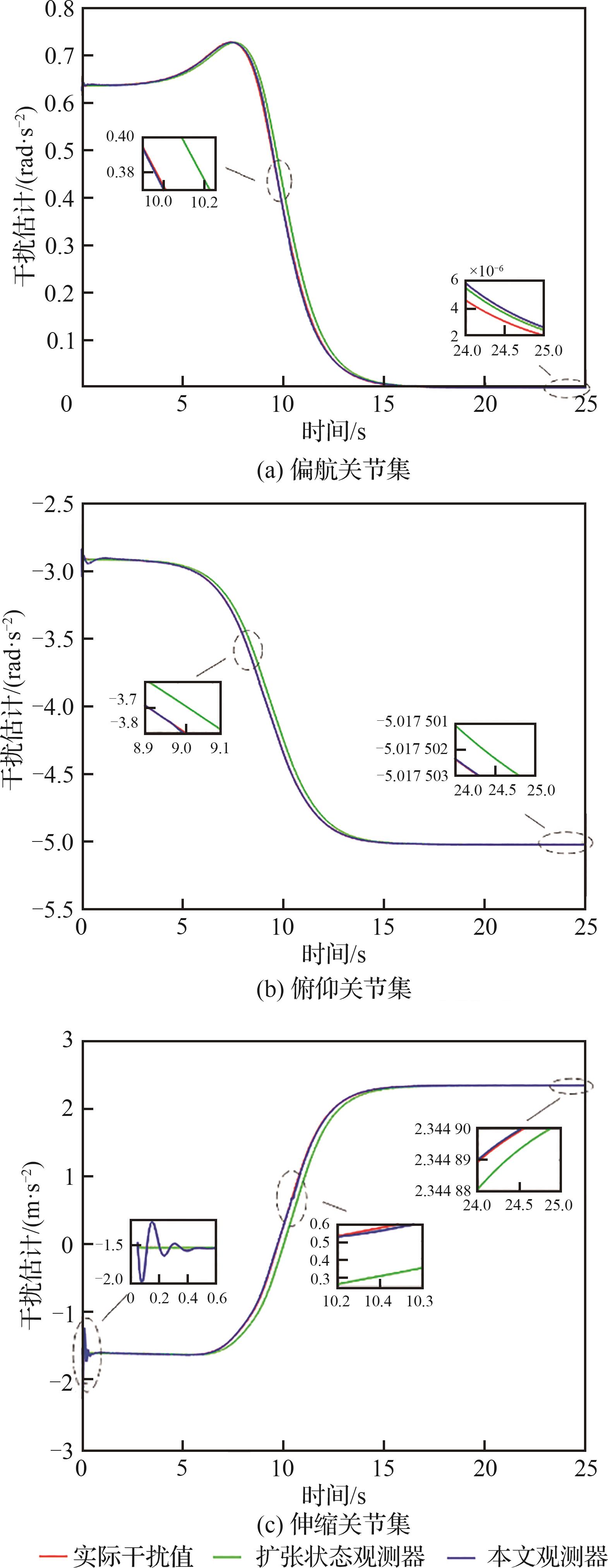

Fig. 9
Estimation deviations of lumped disturbances of telescopic boom joints

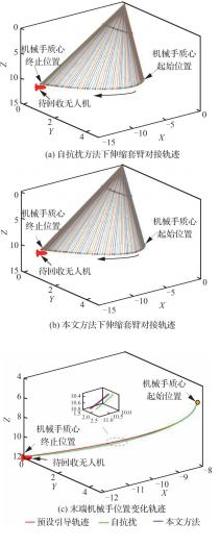
Fig. 10
Changes of movement trajectory of telescopic boom
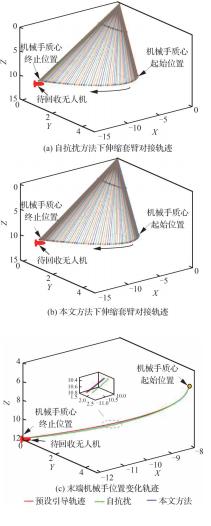

Fig. 11
Position change of telescopic boom manipulator


Fig. 12
Position deviation of the manipulator
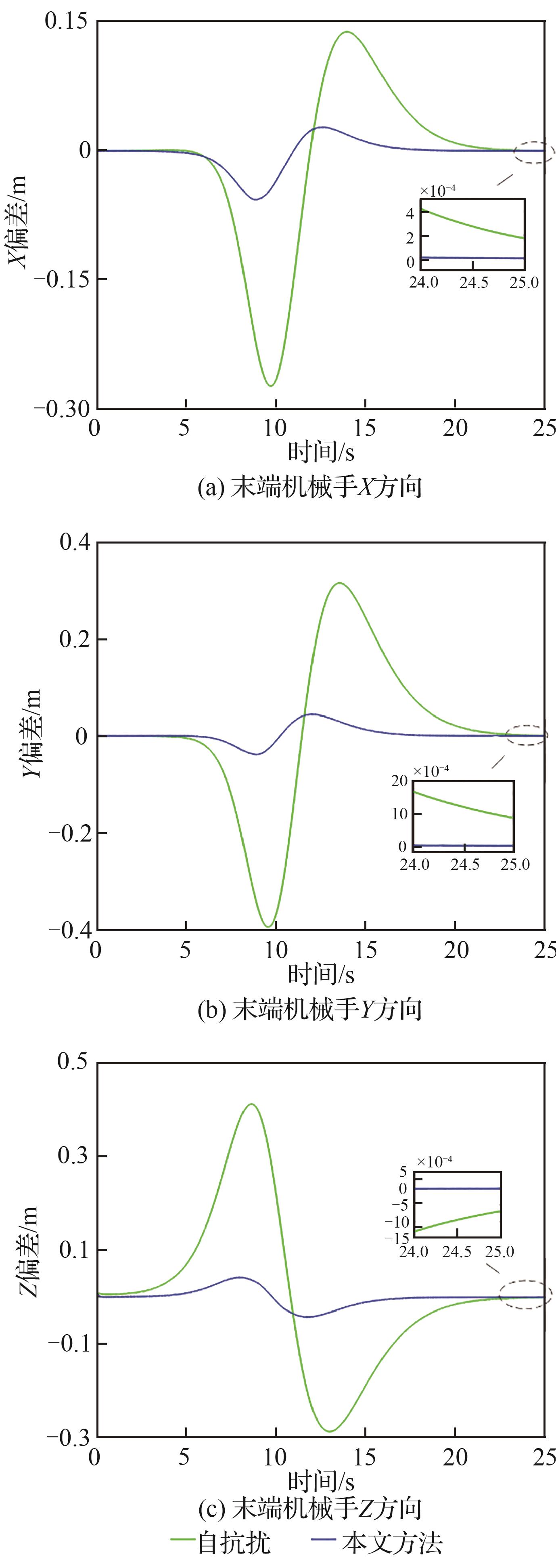

Fig. 13
Control torque/force of the telescopic boom
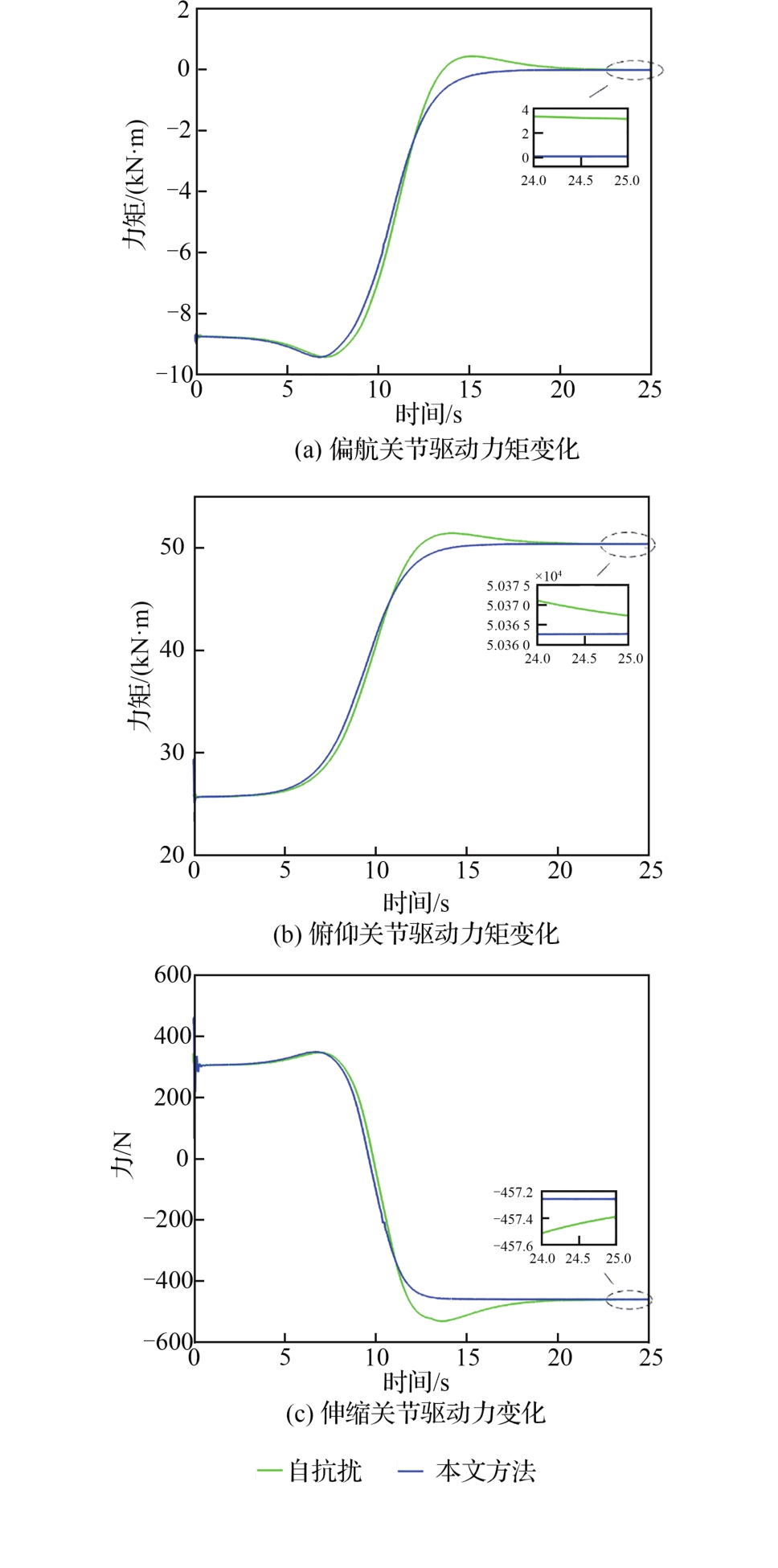

Fig. 14
State changes of telescopic boom joints


Fig. 15
Output deviation of telescopic boom joints

| 1 | 王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41(4): 023732. |
| WANG X K, LIU Z H, CONG Y R, et al. Miniature fixed-wing UAV swarms: Review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 023732 (in Chinese). | |
| 2 | BEARD R W, MCLAIN T W, NELSON D B, et al. Decentralized cooperative aerial surveillance using fixed-wing miniature UAVs[J]. Proceedings of the IEEE, 2006, 94(7): 1306-1324. |
| 3 | SU Z K, WANG X W, WANG H L, Neural-adaptive constrained flight control for air ground recovery under terrain obstacles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 58(1): 374-390. |
| 4 | SU Z K, LI C T, ZHEN Z Y. Anti-disturbance constrained control of the air recovery carrier via an integral barrier Lyapunov function[J]. Aerospace Science and Technology, 2020, 106: 106157. |
| 5 | 宋怡然, 申超, 李东兵. 美国分布式低成本无人机集群研究进展[J]. 飞航导弹, 2016(8): 17-22. |
| SONG Y R, SHEN C, LI D B. Research progress of distributed low-cost UAV cluster in America[J]. Aerodynamic Missile Journal, 2016(8): 17-22 (in Chinese). | |
| 6 | SUN L, BEARD R W, COLTON M B, et al. Dynamics and control of cable-drogue system in aerial recovery of micro air vehicles based on Gauss's principle[C]∥ Proceedings of the 2009 conference on American Control Conference. New York: ACM, 2009. |
| 7 | SU Z K, LI C T, LIU Y H. Anti-disturbance dynamic surface trajectory stabilization for the towed aerial recovery drogue under unknown airflow disturbances[J]. Mechanical Systems and Signal Processing, 2021, 150: 107342. |
| 8 | SMITH J, KUNZ D. Simulation of the dynamically coupled KC-135 tanker and flying boom: AIAA-2007-6711[R]. Reston: AIAA, 2007. |
| 9 | SMITH J, KUNZ D. Dynamic coupling of the KC-135 tanker and boom for modeling and simulation[J]. Journal of Aircraft, 2007, 44(3): 1034-1039. |
| 10 | 薛建平, 陈博, 王小平. 空中加油伸缩套管控制研究[J]. 飞行力学, 2008, 26(4): 14-18. |
| XUE J P, CHEN B, WANG X P. Control law research on aerial refueling boom[J]. Flight Dynamics, 2008, 26(4): 14-18 (in Chinese). | |
| 11 | 高久安, 贾秋玲. 自动空中加油杆LQR控制器设计[J]. 电子设计工程, 2014, 22(2): 102-104. |
| GAO J A, JIA Q L. LQR controller design for boom air-refueling bar[J]. Electronic Design Engineering, 2014, 22(2): 102-104 (in Chinese). | |
| 12 | 李俊国. 蜂群式固定翼无人机空基回收系统设计及动力学分析[D]. 哈尔滨: 哈尔滨工业大学, 2017: 1-47. |
| LI J G. Design and dynamics analysis of air base recovery system for colony type fixed wing UAV[D]. Harbin: Harbin Institute of Technology, 2017: 1-47 (in Chinese). | |
| 13 | 姚来鹏, 侯保林, 刘曦. 采用摩擦补偿的弹药传输机械臂自适应终端滑模控制[J]. 上海交通大学学报, 2020, 54(2): 144-151. |
| YAO L P, HOU B L, LIU X. Adaptive terminal sliding mode control of a howitzer shell transfer arm with friction compensation[J]. Journal of Shanghai Jiao Tong University, 2020, 54(2): 144-151 (in Chinese). | |
| 14 | FENG Y, YU X H, MAN Z H. Non-singular terminal sliding mode control of rigid manipulators[J]. Automatica, 2002, 38(12): 2159-2167. |
| 15 | ZAARE S, SOLTANPOUR M R. Adaptive fuzzy global coupled nonsingular fast terminal sliding mode control of n-rigid-link elastic-joint robot manipulators in presence of uncertainties[J]. Mechanical Systems and Signal Processing, 2022, 163: 108165. |
| 16 | 何雪涛, 程源, 黄钟,等. 齐次坐标变换在空间机构分析中的应用[J]. 北京化工大学学报(自然科学版), 1999, 26(1): 41-44. |
| HE X T, CHENG Y, HUANG Z, et al. Transformation of homogeneous coordinates and its application in the analysis of spatial mechanism[J]. Journal of Beijing University of Chemical Technology (Natural Science Edition), 1999, 26(1): 41-44 (in Chinese). | |
| 17 | 王永超. 刚体转动惯量的质量投影法[J]. 大学物理, 2010, 29(9): 16-18, 29. |
| WANG Y C. The mass projection method of rigid body rotational inertia[J]. College Physics, 2010, 29(9): 16-18, 29 (in Chinese). | |
| 18 | 刘鹏, 王强, 张伟. 机械臂动力学建模及控制仿真[J]. 自动化与仪表, 2017, 32(3): 9-12. |
| LIU P, WANG Q, ZHANG W. Dynamics modeling and control simulation of manipulator[J]. Automation & Instrumentation, 2017, 32(3): 9-12 (in Chinese). | |
| 19 | 陈博, 董新民, 徐跃鉴, 等. 加油机尾流场建模与仿真分析[J]. 飞行力学, 2007, 25(4): 73-76. |
| CHEN B, DONG X M, XU Y J, et al. Modeling and simulation of the tanker's wake field[J]. Flight Dynamics, 2007, 25(4): 73-76 (in Chinese). | |
| 20 | SU Z K, WANG H L, YAO P, et al. Back-stepping based anti-disturbance flight controller with preview methodology for autonomous aerial refueling[J]. Aerospace Science and Technology, 2017, 61: 95-108. |
| 21 | 王福军. 计算流体动力学分析CFD软件原理与应用[M]. 北京: 清华大学出版社, 2004: 1-272. |
| WANG F J. Computational fluid dynamics analysis: Principle and application of CFD software[M]. Beijing: Tsinghua University Press, 2004: 1-272 (in Chinese). | |
| 22 | UMENO T, HORI Y. Robust speed control of DC servomotors using modern two degrees-of-freedom controller design[J]. IEEE Transactions on Industrial Electronics, 1991, 38(5): 363-368. |
| 23 | UTKIN V. Variable structure systems with sliding modes[J]. IEEE Transactions on Automatic Control, 1977, 22(2): 212-222. |
| 24 | SU Z K, WANG H L, LI N. Anti-disturbance rapid vibration suppression of the flexible aerial refueling hose[J]. Mechanical Systems and Signal Processing, 2018, 104: 87-105. |
| 25 | YU S H, YU X H, SHIRINZADEH B, et al. Continuous finite-time control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964. |
| 26 | ZUO Z Y. Non-singular fixed-time terminal sliding mode control of non-linear systems[J]. IET Control Theory and Applications, 2015, 9(4): 545-552. |
| 27 | ZHANG T, ZHANG M H, ZOU Y B. Time-optimal and smooth trajectory planning for robot manipulators[J]. International Journal of Control, Automation and Systems, 2021, 19(1): 521-531. |
| 28 | 韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19-23. |
| HAN J Q. Auto-disturbances-rejection controller and its applications[J]. Control and Decision, 1998, 13(1): 19-23 (in Chinese). |
| [1] | Leyan FANG, Han MENG, Mingzhe HOU. Iterative learning sliding mode control with precise parameter estimation and its application [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628889-628889. |
| [2] | Xinyu HOU, Fan ZHANG, Panfeng HUANG, Xiaofei MA, Jialong ZHU, Yang LI. Integrated attitude and vibration control of space large antenna with truss [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727552-727552. |
| [3] | Zheng LI, Jianqiao YU, Xinyun ZHAO. Fixed⁃time convergent sliding mode control for agile turn of air⁃to⁃air missiles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327262-327262. |
| [4] | Yongzhi SHENG, Jiahao GAN, Chengxin ZHANG. Fractional order sliding mode guidance law design with trajectory adjustable and terminal angular constraint [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327073-327073. |
| [5] | Shihao XU, Yingzi GUAN, Jialun PU, Changzhu WEI. Predefined-time sliding mode control for VTHL launch vehicle in reentry phase [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 326857-326857. |
| [6] | Zhongsen WANG, Yuxin LIAO, Caisheng WEI, Ting DAI. Fast terminal sliding mode fault⁃tolerant control of hypersonic vehicle with guaranteed performance [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328476-328476. |
| [7] | Xinyu ZHANG, Siyu XIE, Yang TAO, Gun LI. A robust control method for close formation of aerial-refueling UAVs [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628425-628425. |
| [8] | Honglun WANG, Yanxiang WANG, Yiheng LIU. Recovery trajectory optimization for UAV towed aerial recovery based on trajectory mapping [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628775-628775. |
| [9] | Fei LUO, Zhiyong HU, Junfu LI, Zemeng MA, Junqiang AI. Design and on⁃vehicle demonstration of autonomous docking control system for soft towed grabber [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628921-628921. |
| [10] | Bo LIU, Zhongjie MENG. Tanker/UAV formation tracking control with hose connection constraints [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 328210-328210. |
| [11] | Hao ZHANG, Peng WANG, Guojian TANG, Weimin BAO. Event-triggered fast finite time control for hypersonic morphing vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528494-528494. |
| [12] | Zikang SU, Haitong CHEN, Chuntao LI, Zhuolin XING, Honglun WANG. Coordinating motion planning for towed cable system in UAV aerial recovery with unmatched envelope [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327377-327377. |
| [13] | WEI Kepeng, HU Jian, YAO Jianyong, XING Haochen, LE Guigao. Fast terminal sliding mode control of neural networks for aeromechanical actuators [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(6): 624540-624540. |
| [14] | WANG Yuchen, LIN Defu, WANG Wei, JI Yi. Adaptive fault-tolerance control method for roll stability during phase of large span flight [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(3): 324368-324368. |
| [15] | LI Shuaicong, HE Ruizhi, TANG Guojian, AO Peng. Profile tracking guidance law based on sliding mode control [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724578-724578. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341