Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (24): 328364-328364.doi: 10.7527/S1000-6893.2023.28364
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Guoqi ZENG1, Zifan NIU2, Lili ZHENG1( ), Jie LI2, Delin HAO2
), Jie LI2, Delin HAO2
Received:2022-12-06
Revised:2023-02-06
Accepted:2023-03-20
Online:2023-12-25
Published:2023-05-06
Contact:
Lili ZHENG
E-mail:08968@buaa.edu.cn
CLC Number:
Guoqi ZENG, Zifan NIU, Lili ZHENG, Jie LI, Delin HAO. A real time video image stitching method for UAV based on spherical transformation[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328364-328364.

Fig.1
Image stitching flow chart
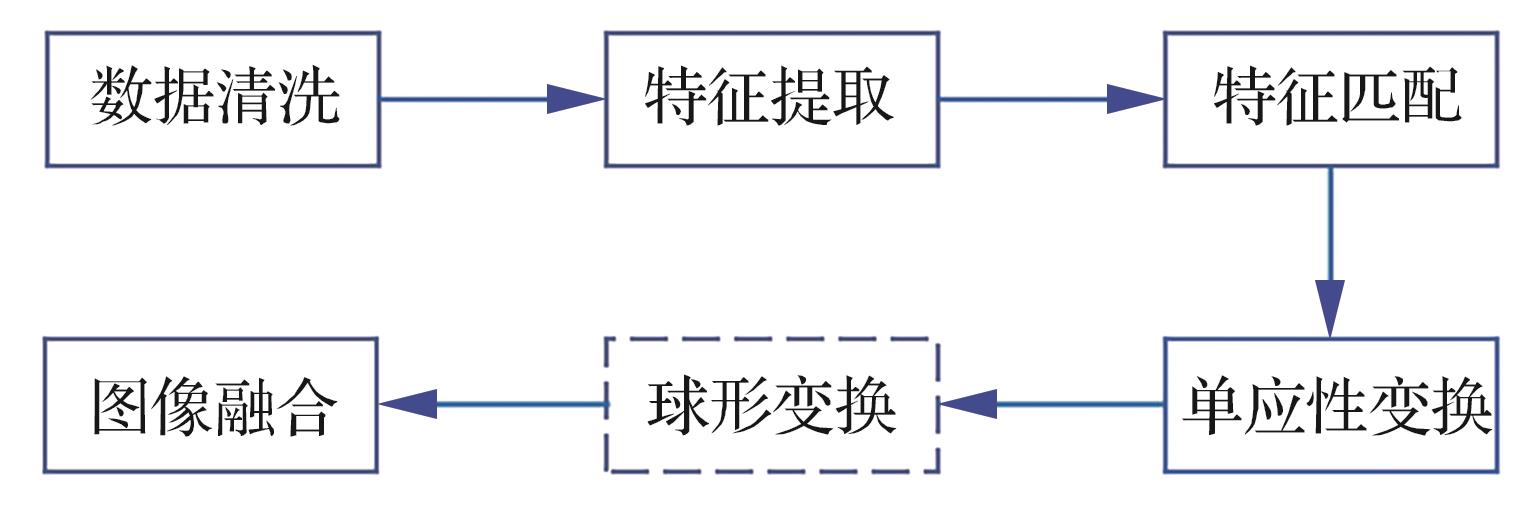

Fig.2
Image distortion caused by accumulation of homography transformation errors
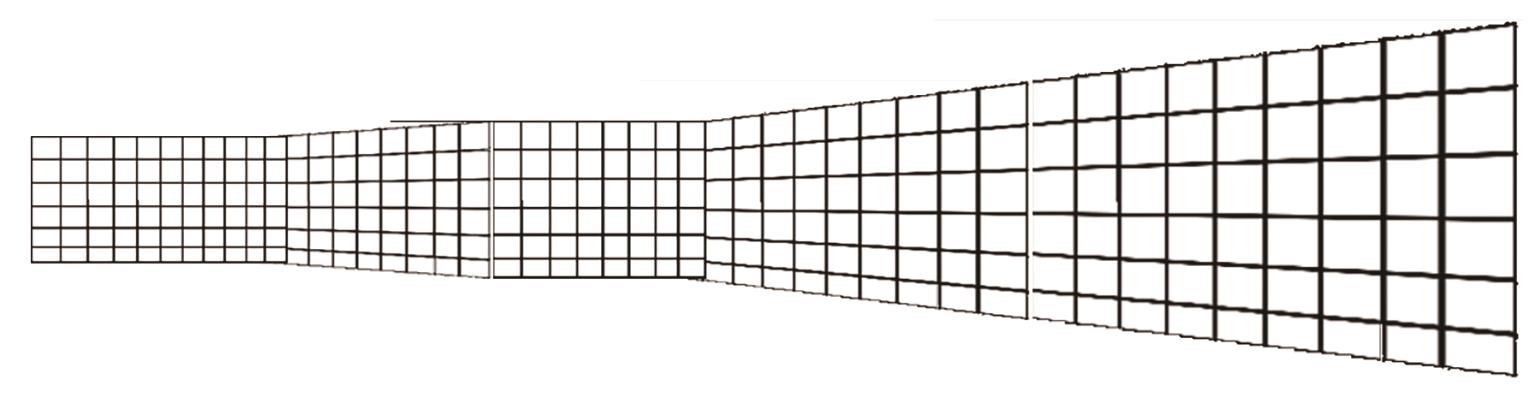

Fig.3
Transmission transformation stitching effect

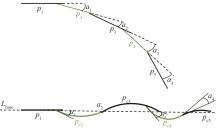
Fig.4
Spherical transformation
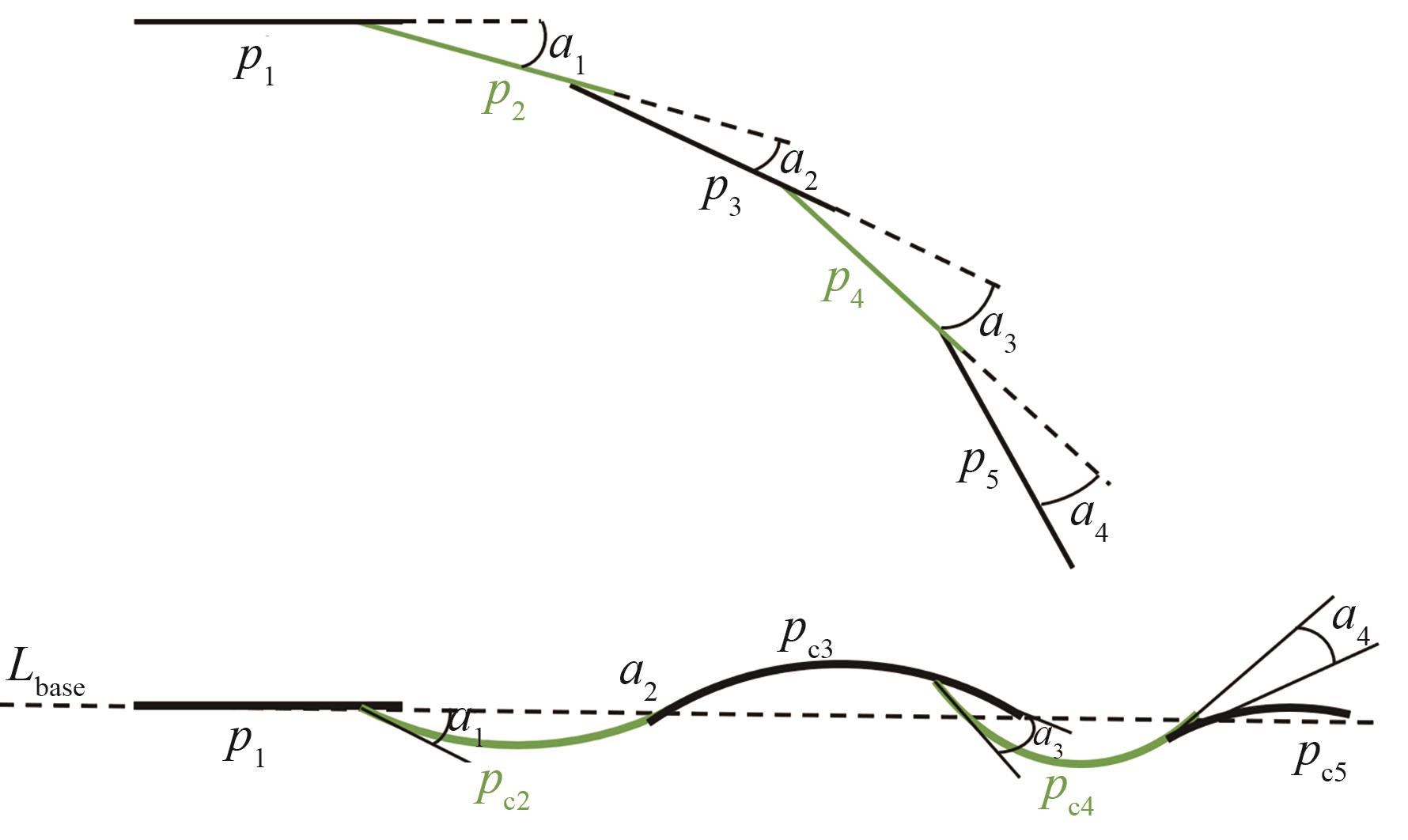
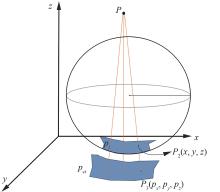
Fig.5
Schematic diagram of spherical projection


Fig.6
Spherical projection rendering

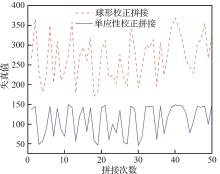
Fig.7
Geometric distortion change between spherical correction and homography transformation on a series of images

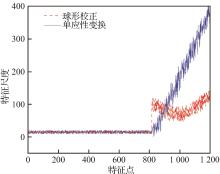
Fig.8
Features scale change between spherical correction and homography transformation on single image

Table 1
Comparison of performance of SURF and ORB[19]
| 算法 | 特征/个 | 匹配点/个 | 运行时间/ms | 千点运行时间/ms |
|---|---|---|---|---|
| ORB | 500 | 161 | 345.2 | 690.6 |
| SURF | 796 | 398 | 1 726.48 | 2 168 |
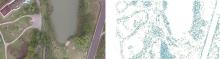
Fig.9
Using SURF algorithm to extract feature points
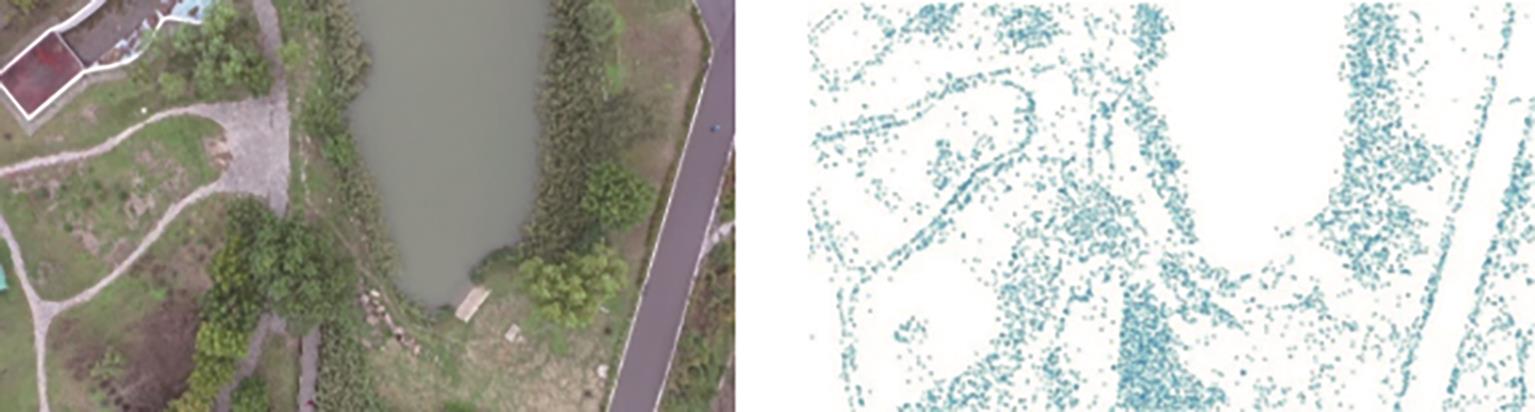

Fig.10
Rough matching of SURF feature points


Fig.11
RANSAC fine matching


Fig.12
Stitching effect of stable orthophoto images


Fig.13
Image distortion caused by accumulation of homography transformation errors


Fig. 14
Stitching effect constrained by spherical correction model

Fig.15
Comparison of cumulative transmission error before and after optimization of correction algorithm
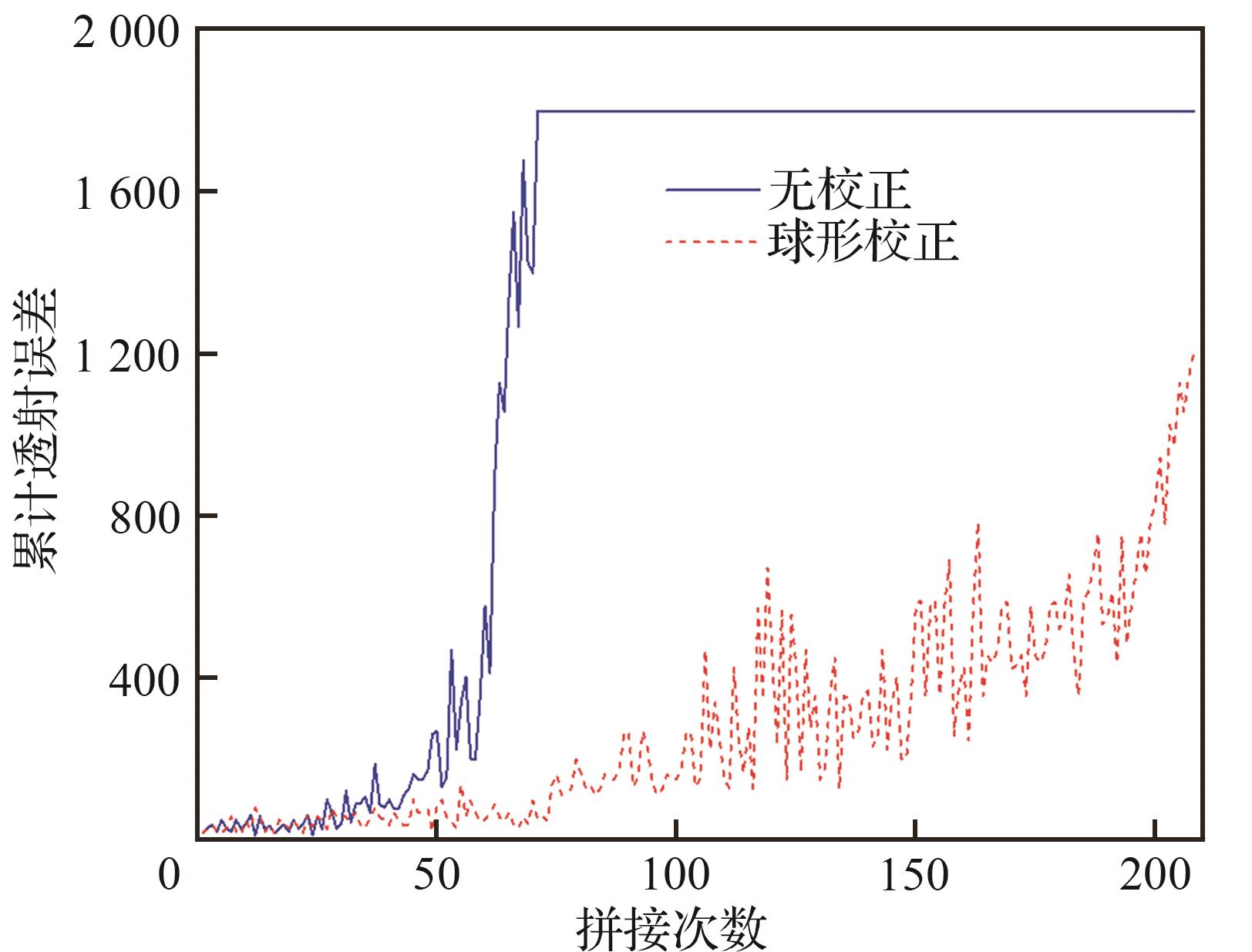

Fig.16
Effect of large view image stitching based on transmission transformation model and feature matching

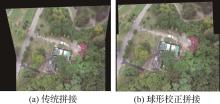
Fig.17
Effect comparison between traditional splicing and spherical correction splicing


Fig.18
Comparison of SPHP splicing and spherical correction splicing

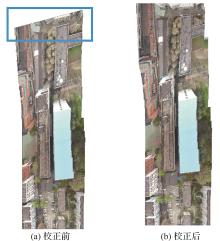
Fig.19
Effect comparison before and after spherical correction of parallax images

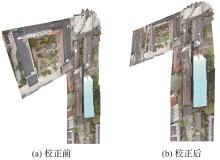
Fig.20
Effect comparison before and after spherical correction for images with large parallax
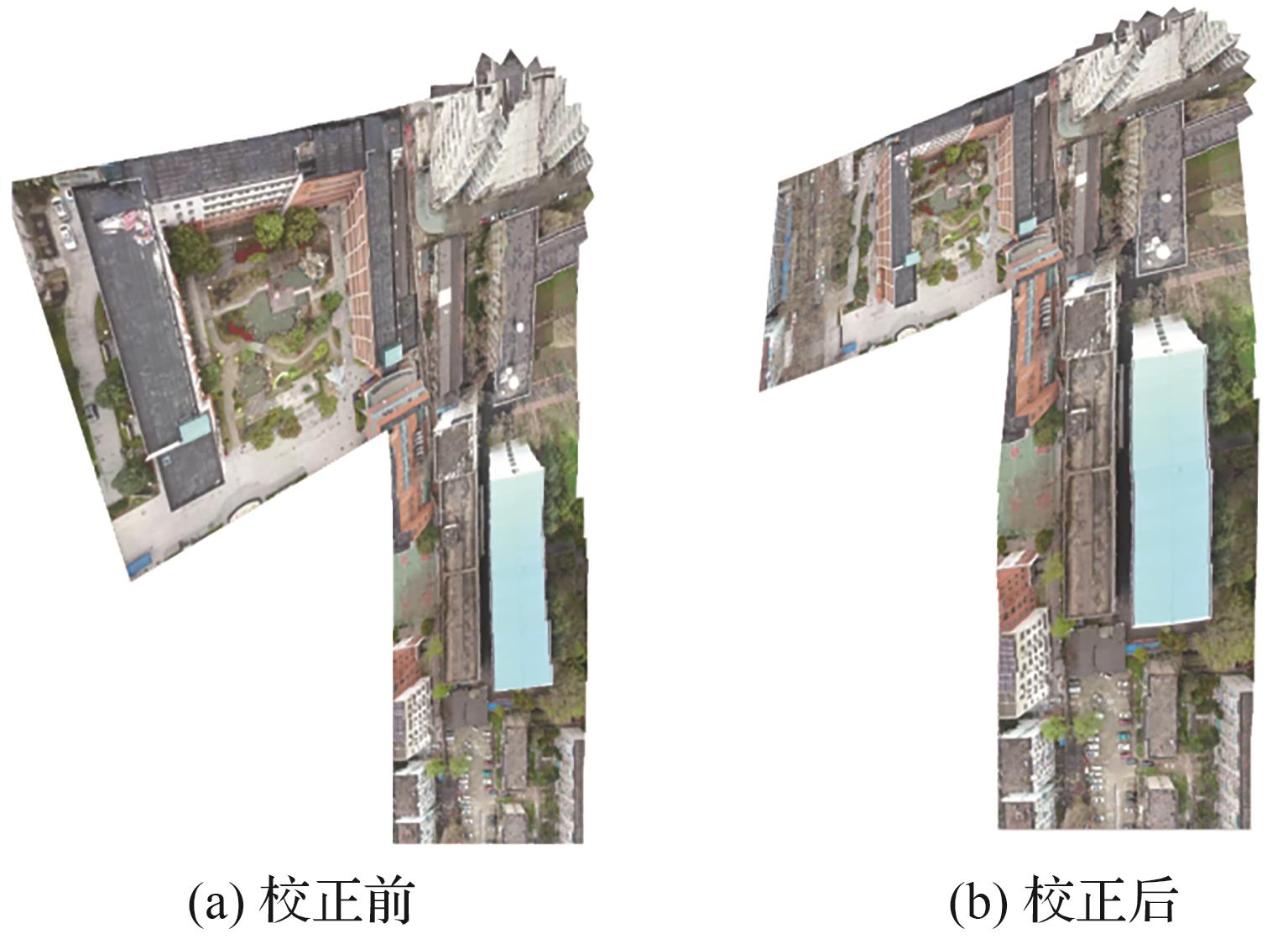
Table 2
Comparison of time consumption of SPHP, ODM, and Ball
| 算法 | 耗时/ms | 平均耗时/ms | 输出大小/KB |
|---|---|---|---|
| SPHP | 351 788 | 2 345.25 | 3 915 |
| ODM | 858 904 | 5 726.48 | 4 330 |
| Ball | 285 900 | 1 906.11 | 3 860 |
Table 3
Comparison of time consumption of SPHP, ODM, and Ball based on POS
| 算法 | 耗时/ms | 平均耗时/ms | 输出大小/KB |
|---|---|---|---|
| SPHP | 351 788 | 2 345.25 | 3 915 |
| ODM | 858 904 | 5 726.48 | 4 330 |
| Ball | 229 290 | 1 528.60 | 3 817 |
| 1 | MORANDO L, RECCHIUTO C T, CALLA J, et al. Thermal and visual tracking of photovoltaic plants for autonomous UAV inspection[J]. Drones, 2022, 6(11): 347. |
| 2 | ZHANG Y T, CHEN S, WANG W Y, et al. Pyramid attention based early forest fire detection using UAV imagery[J]. Journal of Physics: Conference Series, 2022, 2363(1): 012021. |
| 3 | CARVAJAL-RAMÍREZ F, SERRANO J M P R, AGÜERA-VEGA F, et al. A comparative analysis of phytovolume estimation methods based on UAV-photogrammetry and multispectral imagery in a Mediterranean forest[J]. Remote Sensing, 2019, 11(21): 2579. |
| 4 | SKONDRAS A, KARACHALIOU E, TAVANTZIS I, et al. UAV mapping and 3D modeling as a tool for promotion and management of the urban space[J]. Drones, 2022, 6(5): 115. |
| 5 | SHAO R Z, DU C, CHEN H, et al. Fast anchor point matching for emergency UAV image stitching using position and pose information[J]. Sensors, 2020, 20(7): 2007. |
| 6 | ABBADI N K E, HASSANI S A AL, ABDULKHALEQ A H. A review over panoramic image stitching techniques[J]. Journal of Physics: Conference Series, 2021, 1999(1): 012115. |
| 7 | LOWE D G. Object recognition from local scale-invariant features[C]∥ Proceedings of the Seventh IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2002: 1150-1157. |
| 8 | BAY H, ESS A, TUYTELAARS T, et al. Speeded-up robust features (SURF)[J]. Computer Vision and Image Understanding, 2008, 110(3): 346-359. |
| 9 | FISCHER P, DOSOVITSKIY A, BROX T. Descriptor matching with convolutional neural networks: A comparison to SIFT[J]. Computer Science, 2014, 4(7): 678-694. |
| 10 | NGUYEN T, CHEN S W, SHIVAKUMAR S S, et al. Unsupervised deep homography: A fast and robust homography estimation model[J]. IEEE Robotics and Automation Letters, 2018, 3(3): 2346-2353. |
| 11 | ZHANG Y J, MEI X G, MA Y, et al. Hyperspectral panoramic image stitching using robust matching and adaptive bundle adjustment[J]. Remote Sensing, 2022, 14(16): 4038. |
| 12 | ZARAGOZA J, CHIN T J, BROWN M S, et al. As-projective-as-possible image stitching with moving DLT[C]∥ 2013 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2013: 2339-2346. |
| 13 | CHANG C H, SATO Y, CHUANG Y Y. Shape-preserving half-projective warps for image stitching[C]∥ 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2014: 3254-3261. |
| 14 | CHEN Y S, CHUANG Y Y. Natural image stitching with the global similarity prior[M]∥ Computer Vision⁃ECCV 2016. Cham: Springer International Publishing, 2016: 186-201. |
| 15 | ZHANG G F, HE Y, CHEN W F, et al. Multi-viewpoint panorama construction with wide-baseline images[C]∥ IEEE Transactions on Image Processing. Piscataway: IEEE Press, 2016: 3099-3111. |
| 16 | LIN K M, JIANG N J, LIU S C, et al. Direct photometric alignment by mesh deformation[C]∥ 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2017: 2701-2709. |
| 17 | LEE K Y, SIM J Y. Warping residual based image stitching for large parallax[C]∥ 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020: 8195-8203. |
| 18 | DE A LIMA NETO E, RODRIGUES P C. Kernel robust singular value decomposition[J]. Expert Systems With Applications, 2023, 211: 118555. |
| 19 | LI X, LIU Y R, LI D H, et al. Spherical image stitching based on ORB and PROSAC algorithm[C]∥ Proceedings of the 3rd International Conference on Intelligent Information Processing. New York: ACM, 2018: 160-165. |
| 20 | KIM T, IM Y J. Automatic satellite image registration by combination of matching and random sample consensus[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(5): 1111-1117. |
| [1] | Haifeng WANG, Kunpeng LIU, Hongxin JIANG, Chenxi DU. Aerodynamic optimization method of propeller multi⁃design points and variable pitch angle strategy [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 528831-528831. |
| [2] | Jing ZHAO, Dan SONG. Integrity monitoring method for GNSS/IMU integrated navigation system of UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 328943-328943. |
| [3] | Chuanyun WANG, Yang SU, Linlin WANG, Tian WANG, Jingjing WANG, Qian GAO. Multi-object continuous robust tracking algorithm for anti-UAV swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 329017-329017. |
| [4] | Yanhua ZHANG, Dengcheng ZHANG, Zhangwen ZHOU, Yuchang LEI, Lin LI. Concept and design of virtual rudder surface aircraft based on circulation control: Review [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 629608-629608. |
| [5] | Hongyu YIN, Yu WU, Tianjiao LIANG. Cooperative path planning for patrol coverage of fixed wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 328944-328944. |
| [6] | Xudong LUO, Yiquan WU, Jinlin CHEN. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 28822-028822. |
| [7] | Chuihuan KONG, Dawei WU, Zhaoguang TAN, Lijun PAN, Rubing MA, Jiangtao SI. Design of fully electric scheme for three⁃surface verification aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 629618-629618. |
| [8] | Guangjia LI, Hongbo WANG, Kai ZHANG, Zhisheng YI. Lift enhancement and drag reduction technologies of solar powered unmanned aerial vehicles in near space: Review [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529644-529644. |
| [9] | Yunpeng CAI, Dapeng ZHOU, Jiangchuan DING. Intelligent collaborative control of UAV swarms with collision avoidance safety constraints [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529683-529683. |
| [10] | Zhu WANG, Mengtong ZHANG, Zhenpeng ZHANG, Guangtong XU. Multi-UAV cooperative path planning based on multi-index dynamic priority [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328816-328816. |
| [11] | Gaojie ZHENG, Xiaoming HE, Dongpo LI, Huijun TAN, Kun WANG, Zhenlong WU, Depeng WANG. Double 90° deflection inlet/volute coupling flow characteristics of tail-powered unmanned aerial vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 128782-128782. |
| [12] | Chuankai LIU, Zhaoxiang WANG, Junxiong LEI, Zuoyu ZHANG, Kuangang FAN, Jitao ZHANG, Xiaoxue WANG, Hailang PAN, Jianguo LIU. An epipolar relaxation constrained matching algorithm of large-affined images for lunar rover with large span distance in a single movement [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(2): 328659-328659. |
| [13] | Hong WEI, Peng WANG, Wei DONG, Xiaofeng GUO, Zhida LI, Xuesen YANG, Zhongfu TANG, Chao FU. Effects of main flow velocity on frosting and defrosting characteristics of microtubule precooler [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(2): 128639-128639. |
| [14] | Xin HE, Zongying SHI, Yisheng ZHONG. Multi⁃USV cooperative collision avoidance based on velocity obstacle [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729758-729758. |
| [15] | Hongzhen GUO, Mou CHEN, Yongdong DAI, Maofei WANG. Distributed adaptive event⁃triggered formation control for QUAVs [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729917-729917. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 171
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341