Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (14): 328003-328003.doi: 10.7527/S1000-6893.2022.28003
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Bo SHEN( ), Wenliang WU, Gang YANG, Xingshe ZHOU
), Wenliang WU, Gang YANG, Xingshe ZHOU
Received:2022-09-14
Revised:2022-09-28
Accepted:2022-11-21
Online:2023-07-25
Published:2022-12-06
Contact:
Bo SHEN
E-mail:shen@nwpu.edu.cn
Supported by:CLC Number:
Bo SHEN, Wenliang WU, Gang YANG, Xingshe ZHOU. Evaluation models and methods for intelligence of unmanned swarm systems based on collective OODA loop[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(14): 328003-328003.
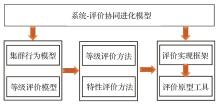
Fig.1
Comprehensive solution to evaluation of intelligence of unmanned swarm system
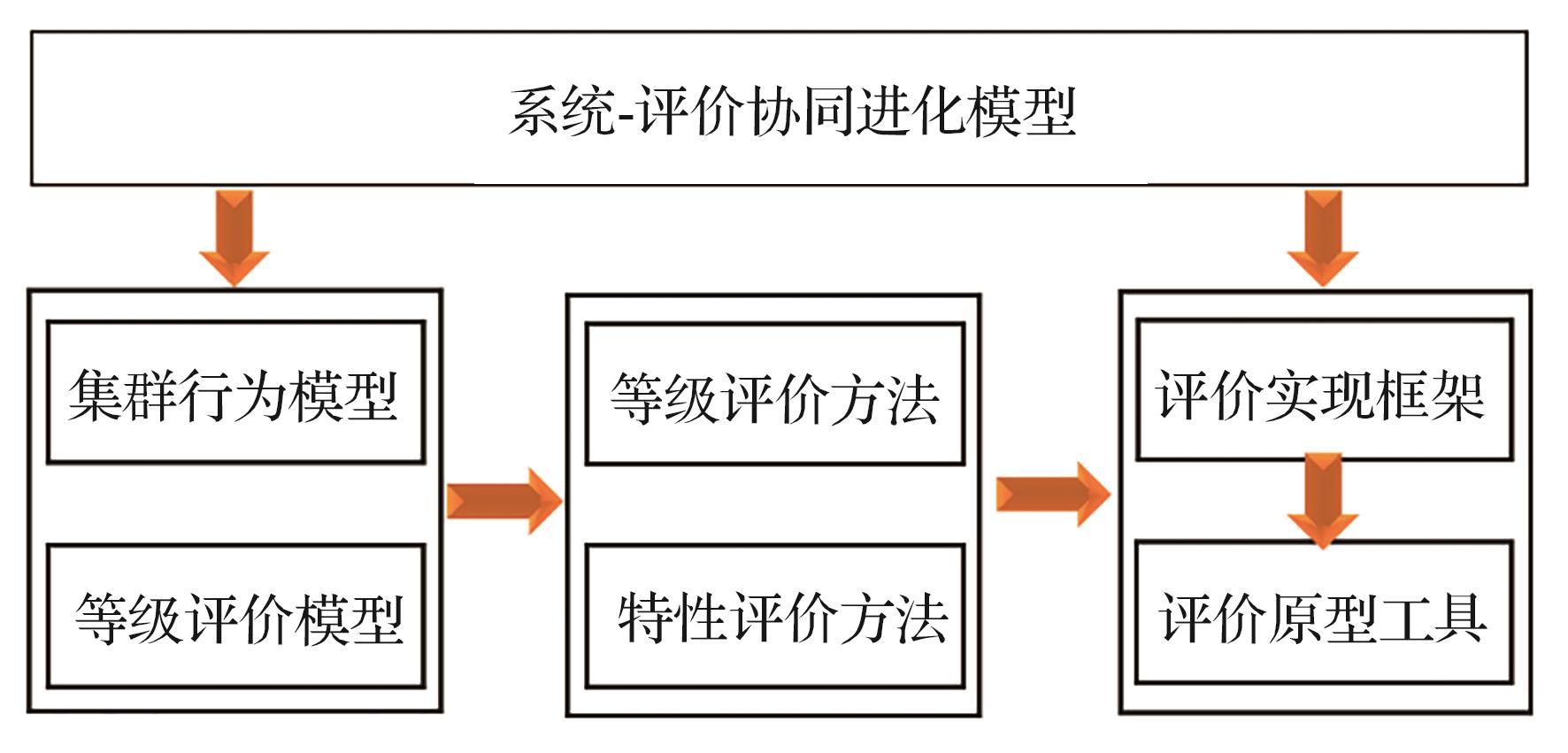
Fig.2
Co-evolution model of intelligence evaluation of unmanned swarm system
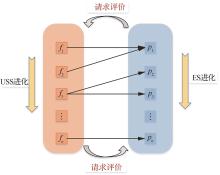
Fig.3
Mapping instance between USS feature measure and ES evaluation parameter
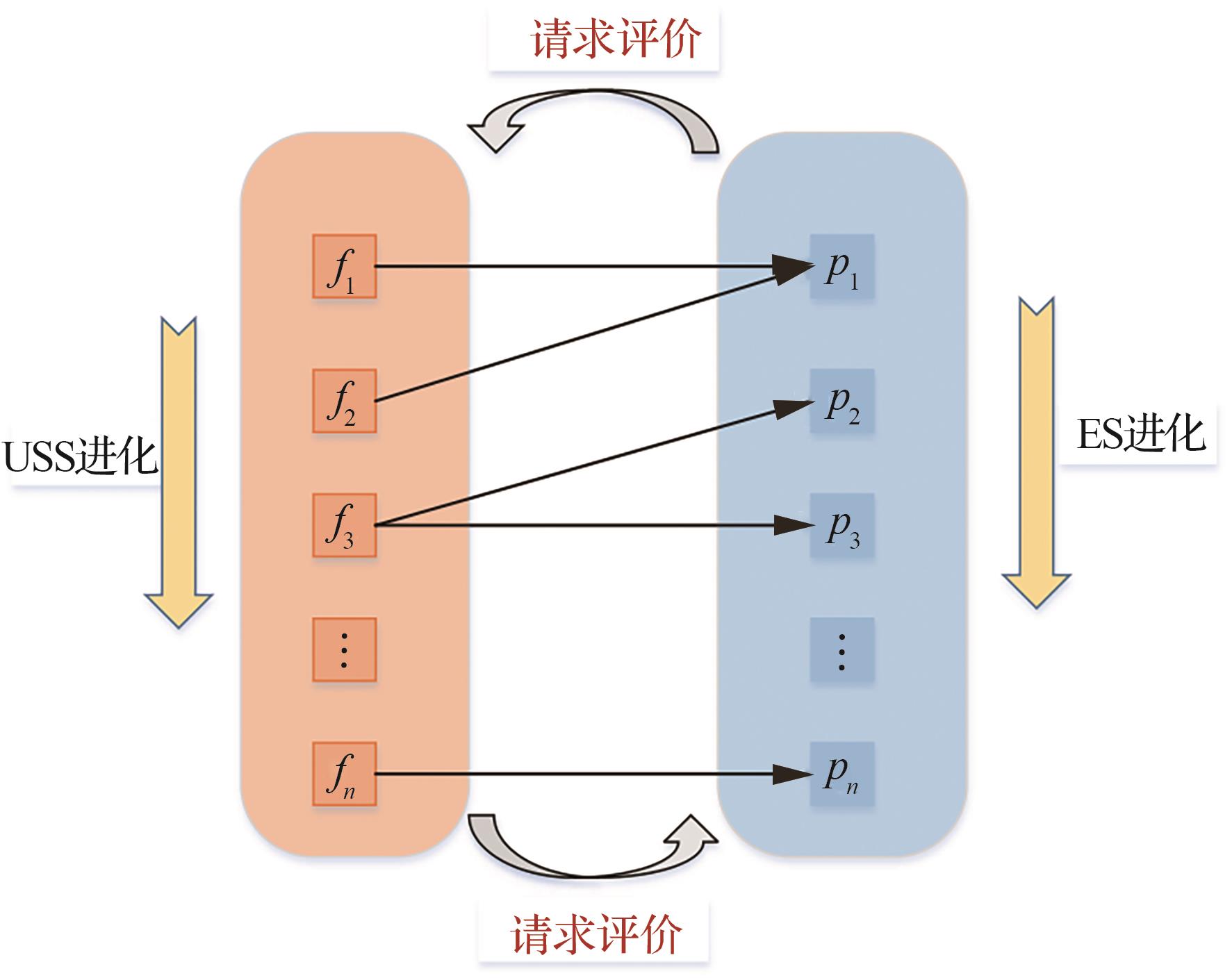

Fig.4
OODA model of unmanned system
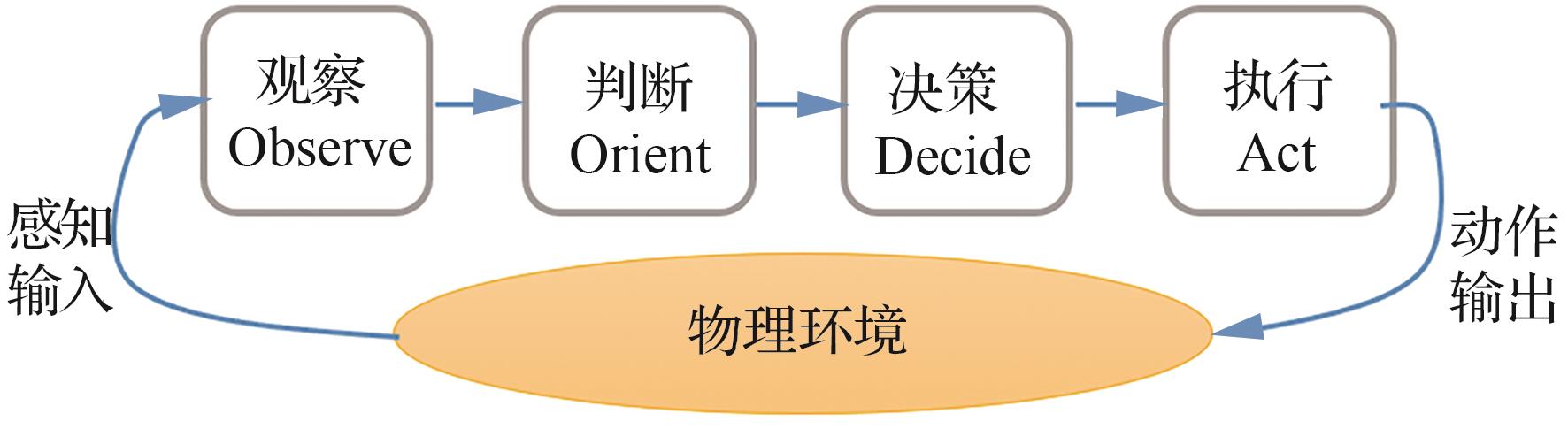
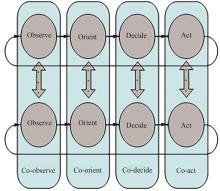
Fig.5
Collective OODA model of unmanned swarm
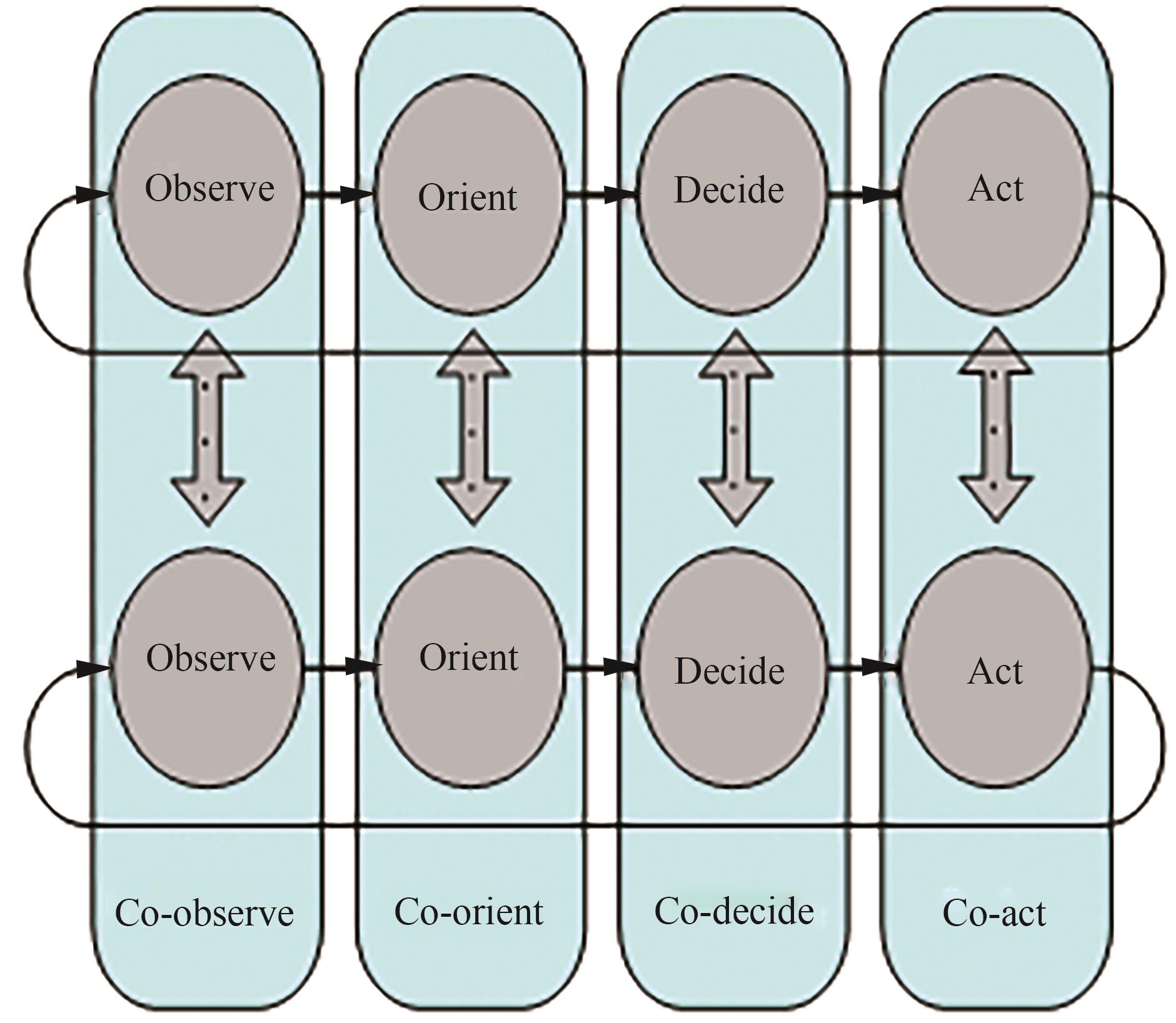
Table 1
Intelligence level classification of unmanned swarm system
| 等级 | 等级命名 | 群体观察 | 群体判断 | 群体决策 | 群体执行 |
|---|---|---|---|---|---|
| 1 | 团队协调 | 感知内部基本的运行状态信息与外部静态目标等环境信息 | 内部基本运行状态信息与外部静态目标等环境信息预测 | 简单动作行为协调 | 内部避碰,故障隔离,完成简单指派任务 |
| 2 | 行为规划 | 感知外部动态目标等环境变化信息 | 外部动态目标等可变环境信息预测 | 简单动作 行为规划 | 外部动态目标规避,故障修复,完成简单指派任务 |
| 3 | 任务重构 | 识别外部动态目标等关键的场景元素 | 外部动态目标等关键的场景元素评价 | 简单突发 任务决策 | 追踪动态目标,完成简单突发任务 |
| 4 | 合作博弈 | 辨识外部动态目标等关键的场景元素 | 外部动态目标等关键的场景元素行为推理 | 复杂突发 任务决策 | 完成复杂突发任务 |
| 5 | 协同认知 | 认知外部动态目标等重要的场景元素 | 交互策略推理 | 长远目标 任务决策 | 完成长远目标任务 |
| 6 | 群体理智 | 认知与预测所有场景元素 | 交互战略判断 | 完全自主 战略意图制定 | 完成长远战略任务 |
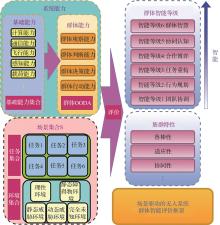
Fig.6
Evaluation process model of intelligence of unmanned swarm system
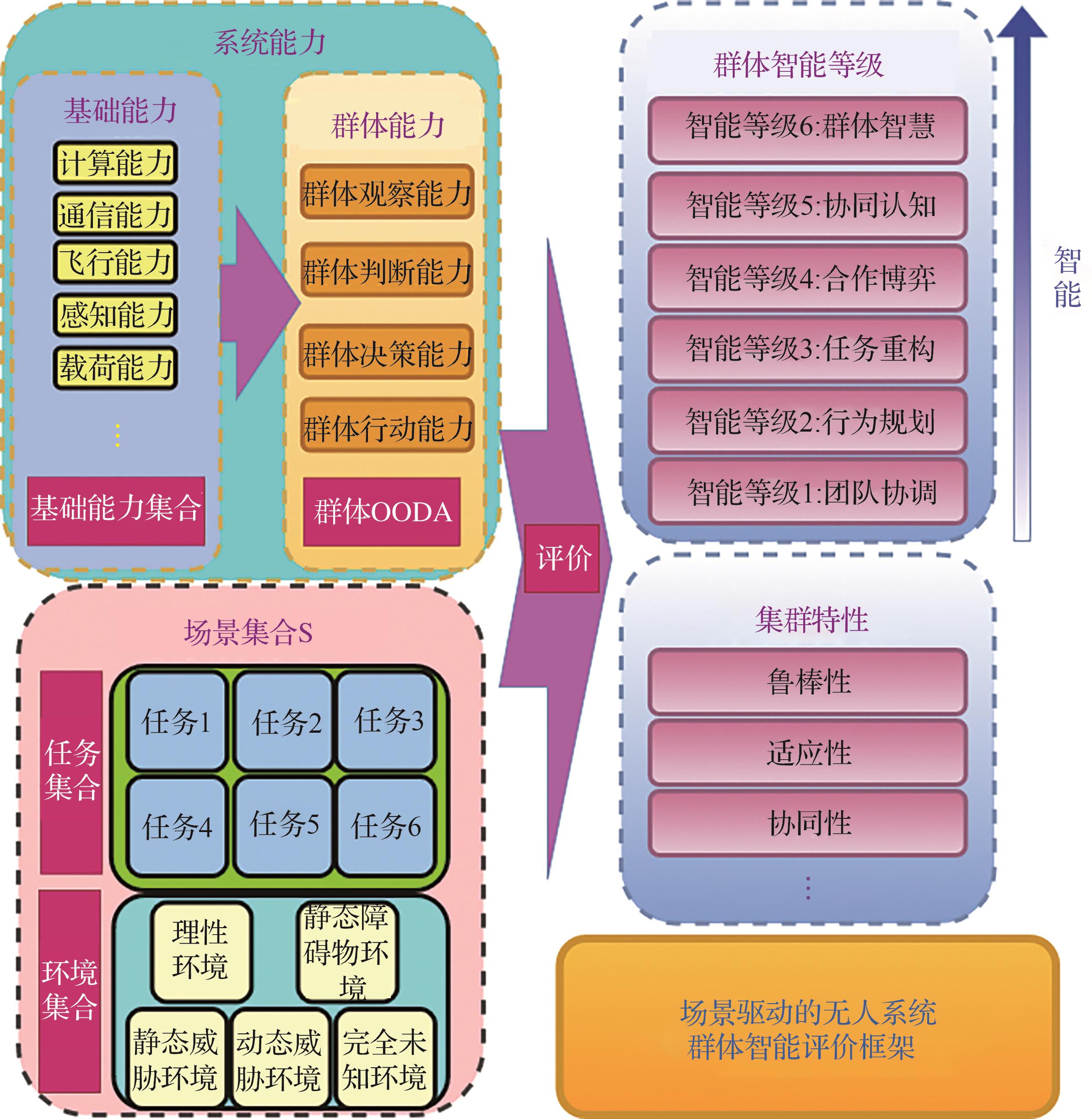
Table 2
Capacity metric set of unmanned swarm system
| 群体能力 | 行为能力 | 复合能力 | 原子能力 | 评价参数 |
|---|---|---|---|---|
| 群体聚合能力Cs | 群体观测能力Csob | 群体感知能力Csse | 个体感知能力集合{Cise} | 感知频率,感知距离,感知类型,感知精度 |
| 群体通信能力Cscm | 个体通信能力集合{Cicm} | 通信距离,传输速率 | ||
| 群体载荷能力Cslo | 个体载荷能力集合{Cilo} | 载荷最大重量,最长时间,载荷类型 | ||
| 群体判断能力Csor | 群体计算能力Cscp | 个体计算能力集合{Cicp} | 计算频率,总线频率 | |
| 群体分析能力Csan | 个体分析能力集合{Cian} | 分析准确率,分析实时性 | ||
| 群体决策能力Csde | 群体计算能力Cscp | 个体计算能力集合{Cicp} | 计算频率,总线频率 | |
| 群体通信能力Cscm | 个体通信能力集合{Cicm} | 通信距离,传输速率 | ||
| 群体规划能力Cspl | 个体规划能力集合{Cipl} | 分析准确率,分析实时性 | ||
| 群体执行能力Csac | 群体载荷能力Cslo | 个体载荷能力集合{Cilo} | 载荷最大重量、最长时间,载荷类型 | |
| 群体运动能力Csmo | 个体运动能力集合{Cimo} | 上行速度,下行速度,最大水平速度,横轴角,滚轴角 | ||
| 群体续航能力Csna | 个体续航能力集合{Cina} | 当前总能量,个体单位里程能耗 |

Fig.7
A SL4U description of searching scenario of unmanned swarm system
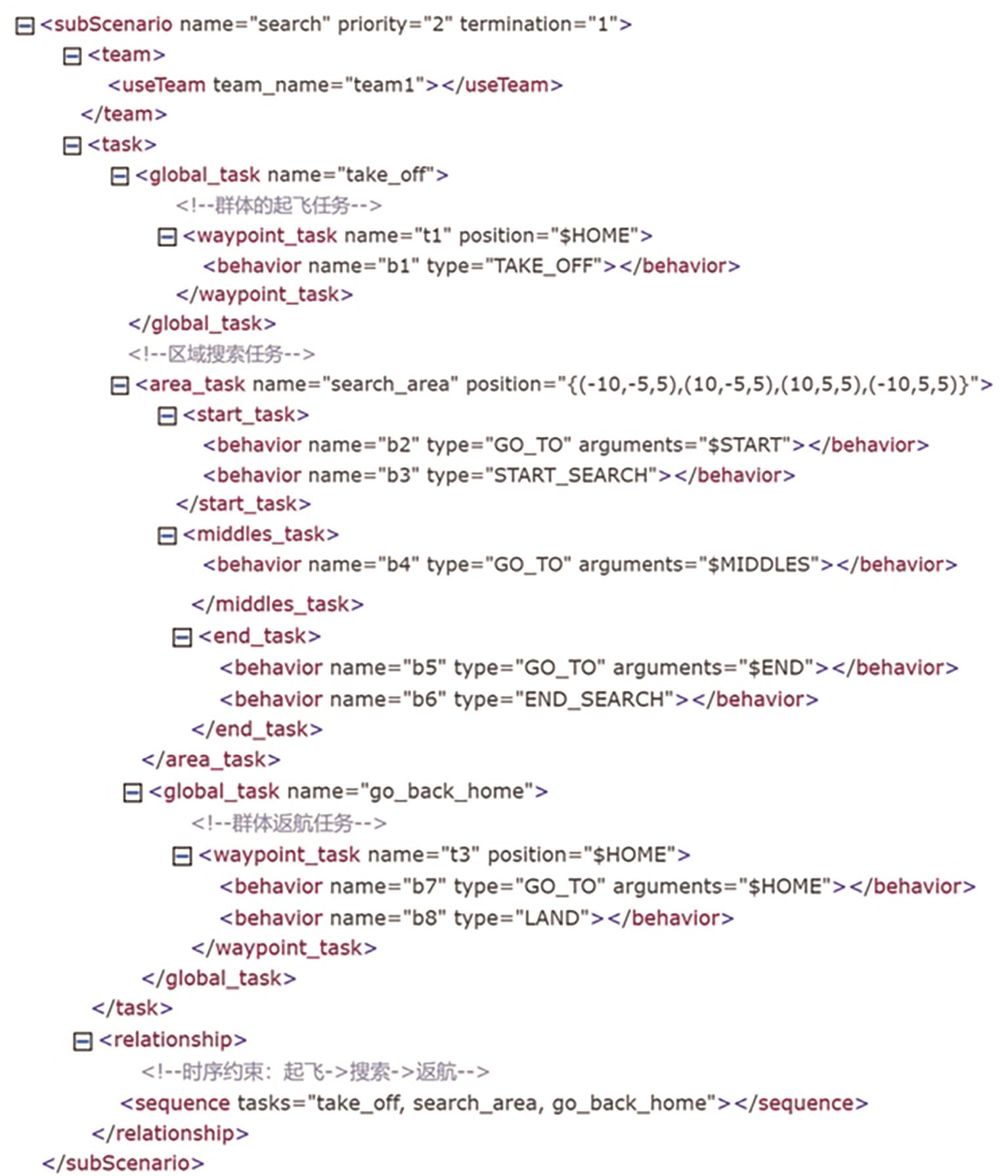

Fig.8
Architecture and functionality of evaluation tools
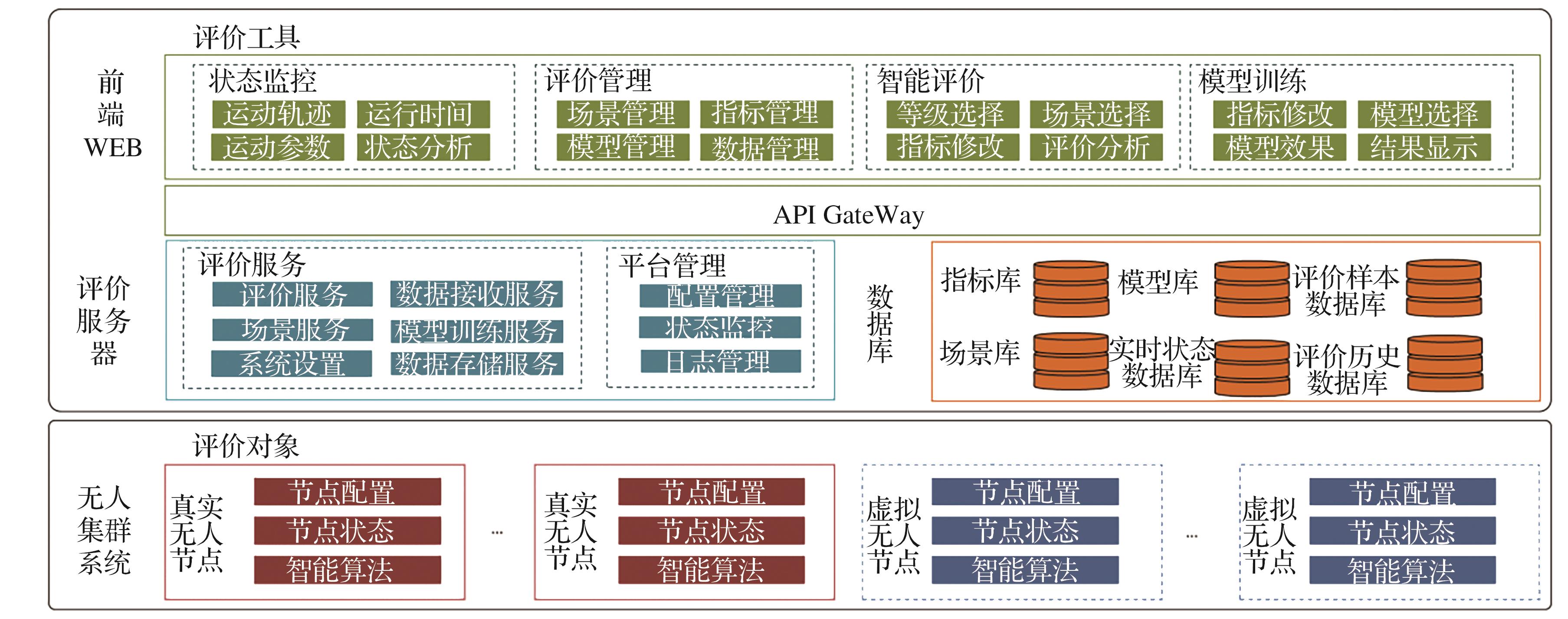
Table 3
Intelligence level instance of unmanned swarm for object searching
| 等级 | 等级命名 | 群体观察 | 群体判断 | 群体决策 | 群体执行 |
|---|---|---|---|---|---|
| 1 | 团队协调 | 单载荷感知 固定感知模式 感知静态目标 | 判别已知简单环境下静态目标 | 预设搜索模式 固定搜索路径 | 按预设搜索模式执行固定搜索路径 |
| 2 | 行为规划 | 单载荷感知 固定感知模式 感知动态目标 | 判别已知简单环境下动态目标 | 预设搜索模式 规划搜索路径 | 按预设搜索模式执行规划搜索路径 |
| 3 | 任务重构 | 多载荷感知 可变感知模式 感知动态多目标 | 判别已知复杂环境下动态目标 | 多载荷切换 多模式切换 在线重规划搜索路径 | 根据环境变化,可选择最优感知载荷和最优感知模式,可按重规划路径搜索 |
| 4 | 合作博弈 | 多载荷感知 可变感知模式 感知动态多目标 感知外部威胁 | 判别已知复杂环境下动态目标,敌我识别、态势感知 | 多载荷切换 多模式切换 在线实时搜索路径规划 小规模战术规划 | 根据环境变化,可选择最优感知载荷和最优感知模式,可进行实时搜索路径规划、自主完成战术目标 |
| 5 | 协同认知 | 多载荷感知可变感知模式 感知外部环境 感知动态多目标 感知外部威胁 | 未知复杂环境认知与构建、识别未知环境下动态多目标,敌我识别、态势感知 | 多载荷切换 多模式切换在线实时搜索路径规划 自主选择目标 小规模战略规划 | 根据环境变化,可选择最优感知载荷和最优感知模式,可进行实时搜索路径规划、自主判定搜索目标,自主完成战术目标 |
| 6 | 群体理智 | 多载荷感知 可变感知模式 感知外部环境 感知动态多目标 感知外部威胁 | 未知复杂环境认知与构建、识别未知环境下动态多目标,敌我识别、态势感知 | 多载荷切换 多模式切换 在线实时搜索路径规划 自主选择目标 长远战略规划 | 根据环境变化,可选择最优感知载荷和模式,可进行实时搜索路径规划、自主判定搜索目标,自主完成长远战略目标 |
Fig.9
Searching scenario of unmanned swarm

Fig.10
Flight trajectory of unmanned swarm searching scenario
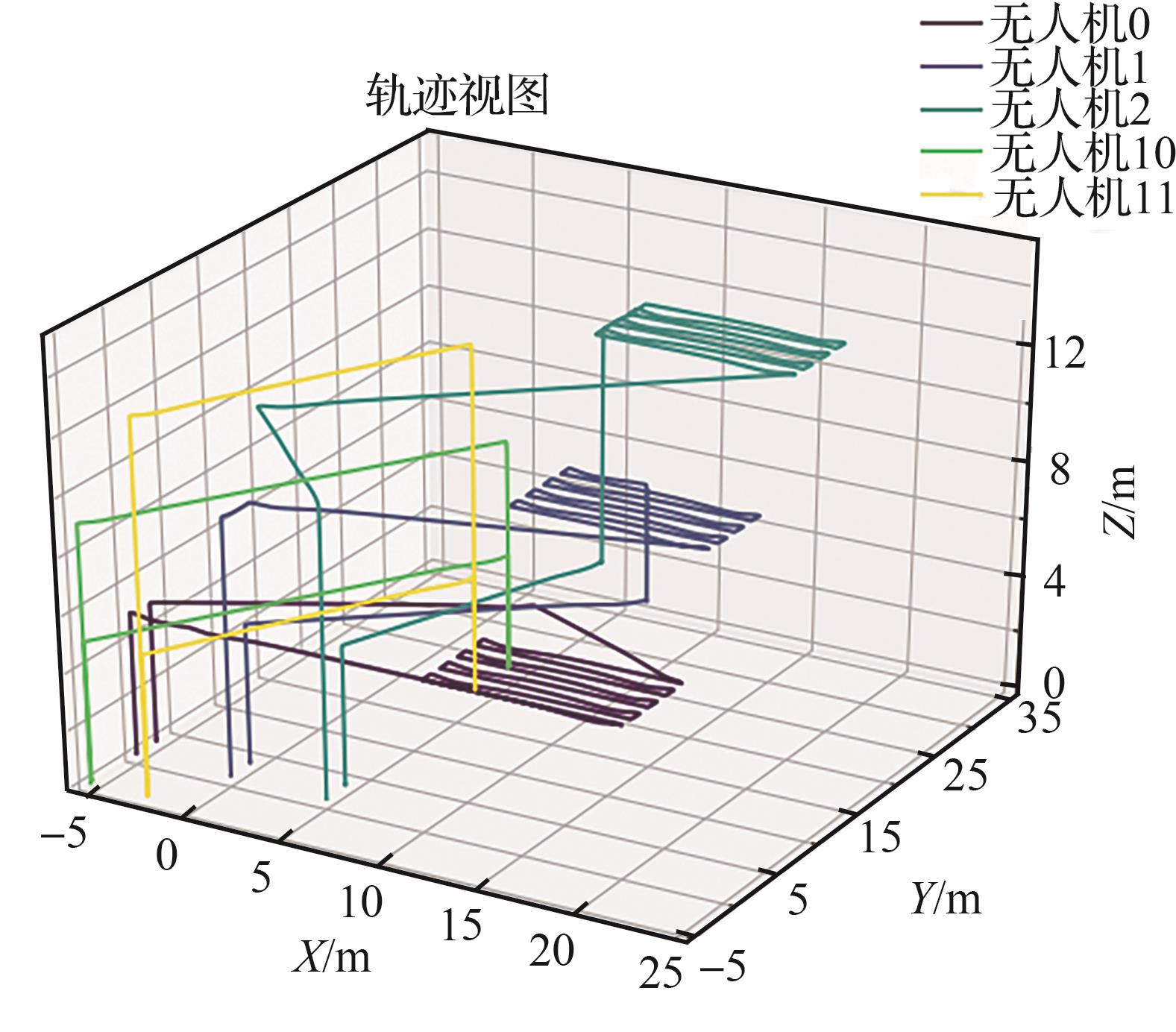
Table 4
Intelligence value of unmanned swarm system in different scenarios
| 场景 | 1 | 2 | 3 |
|---|---|---|---|
| 指标得分 | 0.76 | 0.65 | 0.63 |
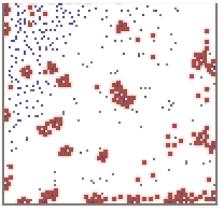
Fig.11
Pursuit scenario of unmanned swarm[44]
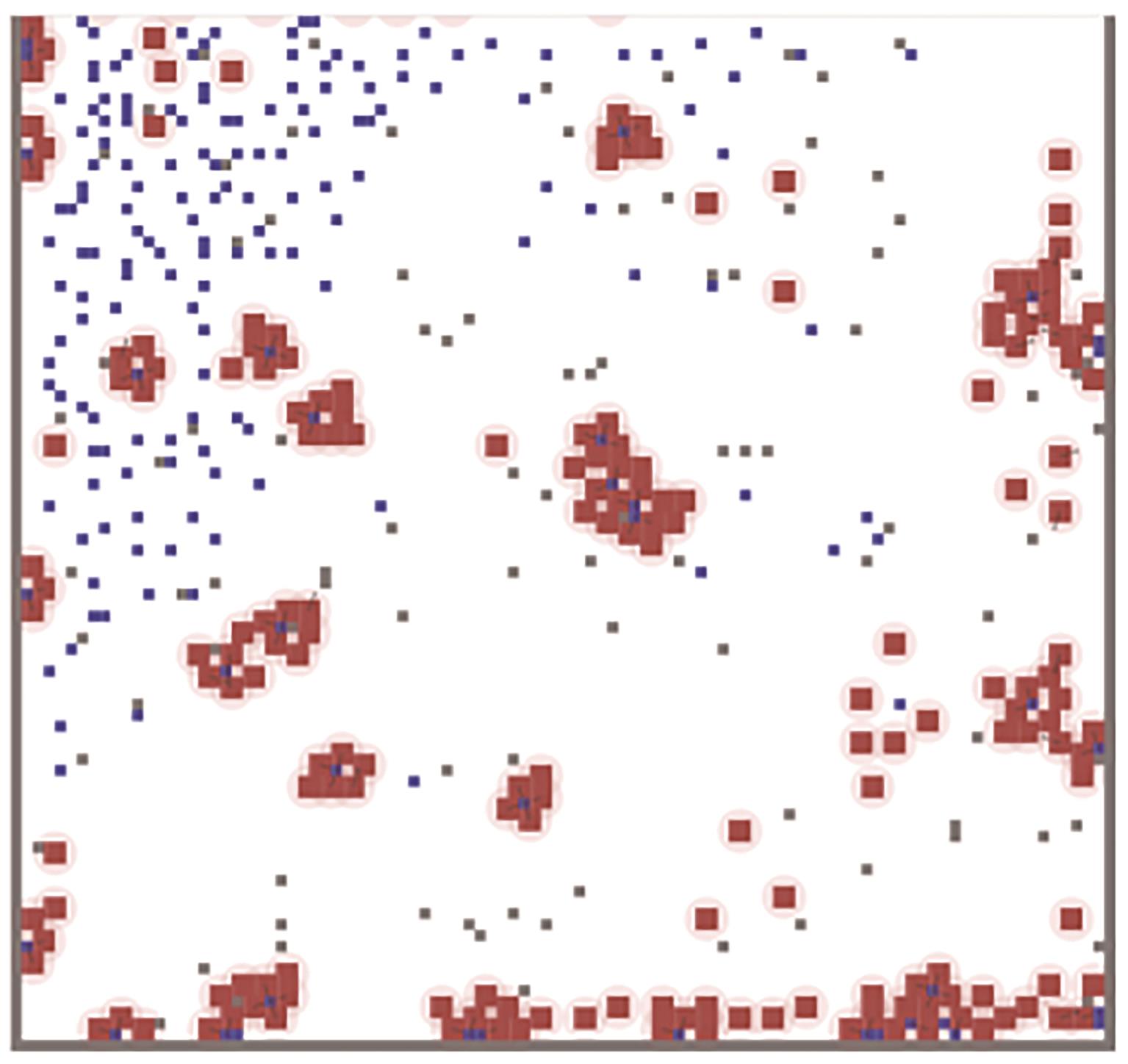
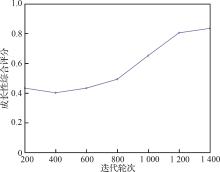
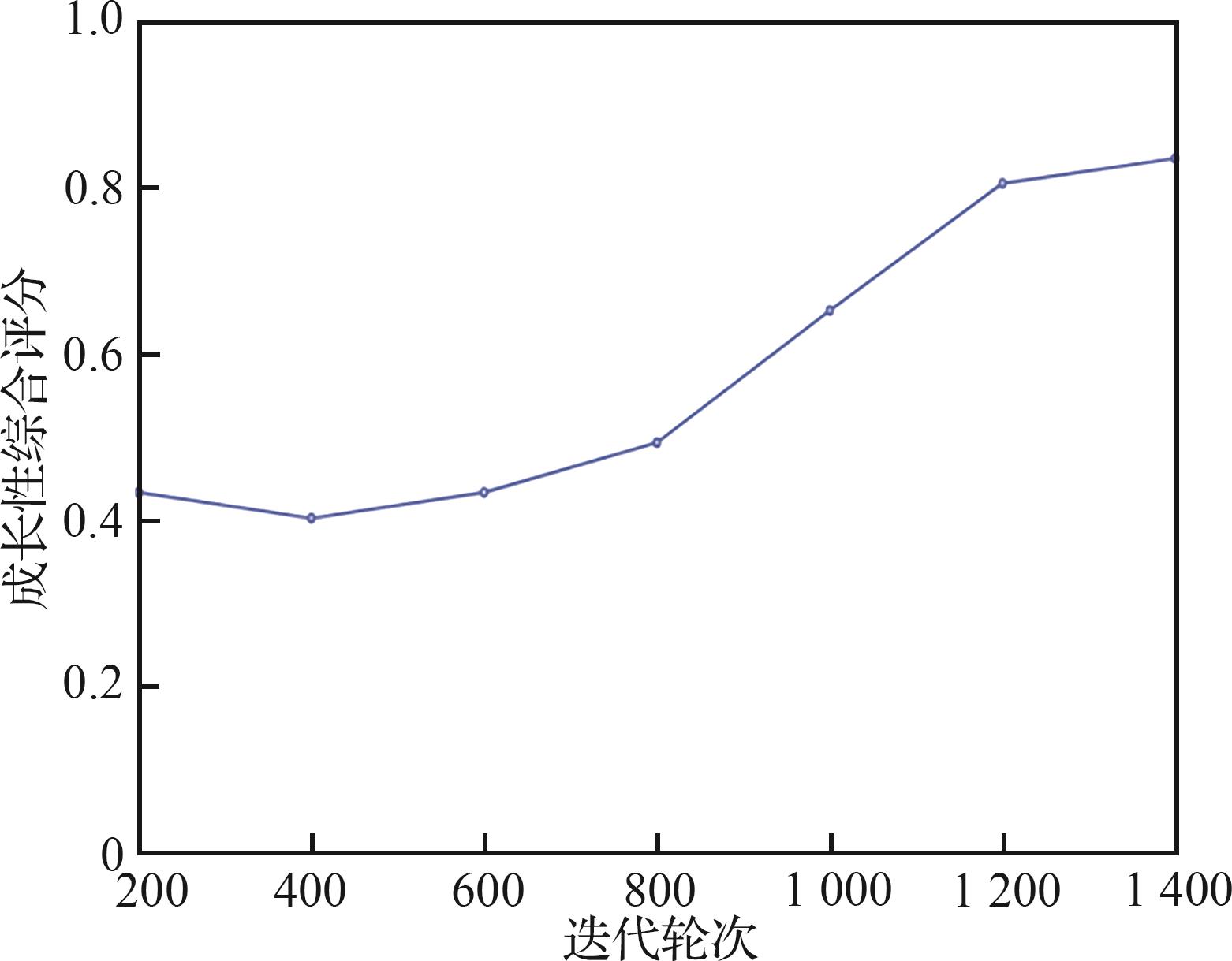
Fig.12
Influence of iterations on growth composite score
| 1 | BENI G, WANG J. Swarm intelligence in cellular robotic systems[M]∥In: DARIO P, SANDINI G, AEBISCHER P, editors. Robots and Biological Systems: Towards a New Bionics? Berlin: Springer, 1993: 703-712. |
| 2 | ZOMAYA A Y. Handbook of nature-inspired and innovative computing[M]. Berlin: Springer, 2006: 187-219. |
| 3 | PAN Y H. Heading toward artificial intelligence 2.0[J]. Engineering, 2016, 2(4): 409-413. |
| 4 | 郭斌, 於志文. 人机物融合群智计算[J]. 中国计算机学会通迅, 2021, 17:35-40. |
| GUO B, YU Z. Crowd intelligence with the deep fusion of human, machine and IoT[J]. Communication of The Chinese Computer Society, 2021, 17:35-40 (in Chinese). | |
| 5 | 国务院. 新一代人工智能发展规划[EB/OL]. (2017-07-20) [2022-07-25]. . |
| Department State. Development plan of new generation AI[EB/OL]. (2017-07-20). [2022-07-25]. . | |
| 6 | WU C, ZHANG T. Intelligent unmanned systems: Important achievements and applications of new generation artificial intelligence[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21(5): 649-651. |
| 7 | 樊邦奎, 张瑞雨. 无人机系统与人工智能[J]. 武汉大学学报(信息科学版), 2017, 42(11): 1523-1529. |
| FAN B K, ZHANG R Y. Unmanned aircraft system and artificial intelligence[J]. Geomatics and Information Science of Wuhan University, 2017, 42(11): 1523-1529 (in Chinese). | |
| 8 | SCHRANZ M, DI CARO G A, SCHMICKL T, et al. Swarm Intelligence and cyber-physical systems: Concepts, challenges and future trends[J]. Swarm and Evolutionary Computation, 2021, 60(2): 100762. |
| 9 | DORIGO M, THERAULAZ G, TRIANNI V. Swarm robotics: Past, present, and future[J]. Proceedings of the IEEE, 2021, 109(7): 1152-1165. |
| 10 | CHEN J, SUN J, WANG G. From unmanned systems to autonomous intelligent systems[J]. Engineering, 2022, 12: 16-19. |
| 11 | CHUNG S J, PARANJAPE A A, DAMES P, et al. A survey on aerial swarm robotics[J]. IEEE Transactions on Robotics, 2018, 34(4): 837-855. |
| 12 | DORIGO M, THERAULAZ G, TRIANNI V. Reflections on the future of swarm robotics[J]. Science Robotics, 2020, 5(49): eabe4385. |
| 13 | HAMANN H. Swarm robotics: A formal approach[M]. Berlin: Springer, 2018:6-8. |
| 14 | 武文亮, 周兴社, 沈博, 等. 集群机器人系统特性评价研究综述[J]. 自动化学报, 2022, 48(5): 1153-1172. |
| WU W L, ZHOU X S, SHEN B, et al. A review of swarm robotic systems property evaluation research[J]. Acta Automatica Sinica, 2022, 48(5): 1153-1172 (in Chinese). | |
| 15 | ZHANG K, YANG Z, BASAR T. Multi-agent reinforcement learning: A selective overview of theories and algorithms[M]. Hanadbook of Reinforcement Learning and Control. Berlin: Springer, 2021:321-384. |
| 16 | KAELBLING L P. The foundation of efficient robot learning[J]. Science, 2020, 369(6506): 915-916. |
| 17 | TURING A M I Computing machinery and intelligence[J]. Mind, 1950, LIX(236): 433-460. |
| 18 | LI L, ZHENG N N, WANG F Y. A theoretical foundation of intelligence testing and its application for intelligent vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(10): 6297-6306. |
| 19 | 国家自然科学基金委员会. 人工智能挑战性科学难题及颠覆性技术[EB/OL]. (2019-01-04) [2022-07-25]. . |
| National Natural Science Foundation. Challenging scientific problems and disruptive technologies of AI [EB/OL]. (2019-01-04) [2022-07-25]. (in Chinese). | |
| 20 | 国家标准化管理委员会, 中央网信办, 国家发展改革委, 等. 国家新一代人工智能标准体系建设指南[EB/OL]. (2020-07-27) [2022-07-25]. . |
| National Standardization Management Committee, Central Network Information Office, National Development and Reform Commission, et al. Construction guidelines of national new generation AI standard system[EB/OL]. (2020-07-27)[2022-07-25]. (in Chinese). | |
| 21 | DEFENSE O. Unmanned aircraft systems roadmap 2000-2025[R]. Washington DC: Department of Defense, 2000. |
| 22 | DEFENSE O. Unmanned aerial vehicles roadmap 2002-2027[R]. Washington DC: Department of Defense, 2002. |
| 23 | DEFENSE O. Unmanned aircraft system roadmap 2005-2030[R]. Washington DC: Department of Defense, 2005. |
| 24 | CLOUGH B. Metrics, schmetrics! How do You track a UAV’s autonomy?: AIAA-2002-3499[R]. Reston: AIAA,2002. |
| 25 | SHOLES E. Evolution of a UAV autonomy classification taxonomy[C]∥ 2007 IEEE Aerospace Conference. Piscataway: IEEE Press, 2007: 1-16. |
| 26 | SHERIDAN T B. Automation, authority and angst—revisited[C]∥1991 Proceedings of the Human Factors Society Annual Meeting. San Francisco: Human Factors & Ergonomics Society Press, 1991: 2-6. |
| 27 | HUANG H M, PAVEK K, ALBUS J, et al. Autonomy levels for unmanned systems (ALFUS) framework: An update[C]∥ Defense and Security. San Francisco: SPIE, 2005: 439-448. |
| 28 | YOUNG L, YETTER J, GUYNN M. System analysis applied to autonomy: Application to high-altitude long-endurance remotely operated aircraft: AIAA-2005-7103[R]. Reston: AIAA, 2005. |
| 29 | 陈宗基, 魏金钟, 王英勋, 等. 无人机自主控制等级及其系统结构研究[J]. 航空学报, 2011, 32(6): 1075-1083. |
| CHEN Z J, WEI J Z, WANG Y X, et al. UAV autonomous control levels and system structure[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(6): 1075-1083 (in Chinese). | |
| 30 | 王越超, 刘金国. 无人系统的自主性评价方法[J]. 科学通报, 2012, 57(15): 1290-1299. |
| WANG Y C, LIU J G. Autonomy evaluation method of unmanned system[J]. Chinese Science Bulletin, 2012, 57(15): 1290-1299 (in Chinese). | |
| 31 | ZHANG T, LI Q, ZHANG C S, et al. Current trends in the development of intelligent unmanned autonomous systems[J]. Frontiers of Information Technology & Electronic Engineering, 2017, 18(1): 68-85. |
| 32 | 段海滨, 范彦铭, 魏晨, 等. 群体熵: 一种群体智能行为的量化分析工具[J]. 中国科学(信息科学), 2020, 50(3): 335-346. |
| DUAN H B, FAN Y M, WEI C, et al. Swarm entropy: A quantitative analysis tool for swarm intelligence behaviors[J]. Scientia Sinica (Informationis), 2020, 50(3): 335-346 (in Chinese). | |
| 33 | CHAITIN G J. Algorithmic information theory[M]. Cambridge: Cambridge University Press, 2004:179-196. |
| 34 | CHAITIN G J. Gödel’s theorem and information[J]. International Journal of Theoretical Physics, 1982, 21(12): 941-954. |
| 35 | LEGG S, HUTTER M. Universal intelligence: A definition of machine intelligence[J]. Minds and Machines, 2007, 17(4): 391-444. |
| 36 | CHOLLET F. On the measure of intelligence[DB/OL]. arXiv preprint: 1911.01547, 2019. |
| 37 | 郑志明, 吕金虎, 韦卫, 等. 精准智能理论: 面向复杂动态对象的人工智能[J]. 中国科学: 信息科学, 2021, 51(4): 678-690. |
| ZHENG Z M, LYU J H, WEI W, et al. Refined intelligence theory: Artificial intelligence regarding complex dynamic objects[J]. Scientia Sinica (Informationis), 2021, 51(4): 678-690 (in Chinese). | |
| 38 | 罗杰, 姜鑫, 郭炳晖, 等. 群体智能系统的动力学模型与群体熵度量[J]. 中国科学: 信息科学, 2022, 52(1): 99-110. |
| LUO J, JIANG X, GUO B H, et al. Dynamic model and crowd entropy measurement of crowd intelligence system[J]. Scientia Sinica (Informationis), 2022, 52(1): 99-110 (in Chinese). | |
| 39 | IANTOVICS L B, EMMERT-STREIB F, ARIK S. MetrIntMeas a novel metric for measuring the intelligence of a swarm of cooperating agents[J]. Cognitive Systems Research, 2017, 45: 17-29. |
| 40 | WANG X H, ZHANG Y, WANG L Z, et al. Robustness evaluation method for unmanned aerial vehicle swarms based on complex network theory[J]. Chinese Journal of Aeronautics, 2020, 33(1): 352-364. |
| 41 | HECKER J P, MOSES M E. Beyond pheromones: Evolving error-tolerant, flexible, and scalable ant-inspired robot swarms[J]. Swarm Intelligence, 2015, 9(1): 43-70. |
| 42 | 杨伟. 关于未来战斗机发展的若干讨论[J]. 航空学报, 2020, 41(6): 524377. |
| YANG W. Development of future fighters[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(6): 524377 (in Chinese). | |
| 43 | CHEN T Q, GUESTRIN C. XGBoost: A scalable tree boosting system[C]∥ Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. New York: ACM, 2016: 785-794. |
| 44 | ZHENG L M, YANG J C, CAI H, et al. MAgent: A many-agent reinforcement learning platform for artificial collective intelligence[DB/OL]. arXiv preprint: 1712.00600, 2017. |
| [1] | Jun XIONG, Xiangpeng XIE, Zhi XIONG, Yuan ZHUANG, Yu ZHENG. Synchronized self⁃localization and relative⁃localization of unmanned swarms based on graph model [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729708-729708. |
| [2] | Heye XIAO, Jianfeng YANG, Junqiang BAI, Xudong ZHANG, Lirong WU. Modular UAVs configuration method responded to task requirements [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327100-327100. |
| [3] | LIU Chuang, YU Xiaojun, ZHANG Ting, ZHU Haokun. Research status and trend of key technologies for simulation test of unmanned swarm equipment [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S1): 726919-726919. |
| [4] | XIANG Jinwu, DONG Xiwang, DING Wenrui, SUO Jinli, SHEN Lincheng, XIA Hui. Key technologies for autonomous cooperation of unmanned swarm systems in complex environments [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(10): 527570-527570. |
| [5] | ZHANG Hongbo, ZHENG Lianyu, WANG Yiwei. Stability evaluation method for box-joint reconfigurable jig based on module service state [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(9): 424180-424180. |
| [6] | JIA Baohui, YU Lingjie, LIN Yueguo, LU Xiang. Comprehensive analysis model for determination of civil aircraft repair level based on AHP-SPA method [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2017, 38(11): 221130-221130. |
| [7] | ZHANG Lixue, WANG Zhongwei. Environmental Adaptability Evaluation Model for Stratospheric Airships [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2013, 34(4): 719-726. |
| [8] | Li Shulin;Yang Sen;Sun Dong. Evaluation Model of Environmental Worthiness for Military Aircraft [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2009, 30(6): 1053-1057. |
| [9] | Xu Jia. Modeling and Evaluation of Effects of Fault Satellites Distribution on PDOP Availability of Navigation Constellation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2008, 29(5): 1139-1143. |
| [10] | GUO Peng. Comparison and Improvement of Risk Evaluation Methods for Entire Life Cycle (ELC) of Aeronautic Weapons [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2003, 24(5): 427-430. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 875
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 1258
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341