| 1 |
陈小前, 袁建平, 姚雯. 航天器在轨服务技术[M]. 北京: 中国宇航出版社, 2009.
|
|
CHEN X Q, YUAN J P, YAO W. Spacecraft on-orbit service technology[M]. Beijing: China Astronautic Publishing House, 2009 (in Chinese).
|
| 2 |
崔乃刚, 王平, 郭继峰, 等. 空间在轨服务技术发展综述[J]. 宇航学报, 2007, 28(4): 805-811.
|
|
CUI N G, WANG P, GUO J F, et al. A review of on-orbit servicing[J]. Journal of Astronautics, 2007, 28(4): 805-811 (in Chinese).
|
| 3 |
梁斌, 徐文福.空间机器人:建模、规划与控制[M]. 北京: 清华大学出版社, 2017.
|
|
LIANG B, XU W F. Space robotics: Modeling, planning and control[M]. Beijing: Tsinghua University Press,2017 (in Chinese).
|
| 4 |
初未萌, 杨今朝, 邬树楠, 等. 基于LSTM的空间机器人系统惯性张量在轨辨识[J]. 航空学报, 2021, 42(11): 524615.
|
|
CHU W M, YANG J Z, WU S N, et al. LSTM-based on-orbit identification of inertia tensor for space robot system[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(11): 524615 (in Chinese).
|
| 5 |
FLORES-ABAD A, MA O, PHAM K, et al. A review of space robotics technologies for on-orbit servicing[J]. Progress in Aerospace Sciences, 2014, 68: 1-26.
|
| 6 |
胡启阳, 王大轶. 采用双目视觉的非合作空间目标相对导航与惯性参数辨识方法[J]. 宇航学报, 2020, 41(11): 1410-1417.
|
|
HU Q Y, WANG D Y. Relative navigation and identification of inertia parameters of non-cooperative space target based on stereo vision[J]. Journal of Astronautics, 2020, 41(11): 1410-1417 (in Chinese).
|
| 7 |
AGHILI F. A prediction and motion-planning scheme for visually guided robotic capturing of free-floating tumbling objects with uncertain dynamics[J]. IEEE Transactions on Robotics, 2012, 28(3): 634-649.
|
| 8 |
HOU X H, MA C A, WANG Z, et al. Adaptive pose and inertial parameters estimation of free-floating tumbling space objects using dual vector quaternions[J]. Advances in Mechanical Engineering, 2017, 9(10). doi:10.1177/1687814017714210 .
|
| 9 |
侯振东, 王兆魁, 张育林. 基于推力器的组合航天器质量特性辨识方法研究[J]. 航天控制, 2015, 33(1): 54-60.
|
|
HOU Z D, WANG Z K, ZHANG Y L. Research on identification of mass characteristics for spacecraft combination based on thrusters[J]. Aerospace Control, 2015, 33(1): 54-60 (in Chinese).
|
| 10 |
XU W F, HU Z H, ZHANG Y, et al. On-orbit identifying the inertia parameters of space robotic systems using simple equivalent dynamics[J]. Acta Astronautica, 2017, 132: 131-142.
|
| 11 |
MA O, DANG H, PHAM K. On-orbit identification of inertia properties of spacecraft using a robotic arm[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(6): 1761-1771.
|
| 12 |
NGUYEN-HUYNH T C, SHARF I. Adaptive reactionless motion and parameter identification in postcapture of space debris[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(2): 404-414.
|
| 13 |
王明, 黄攀峰, 常海涛, 等. 基于机械臂运动的组合航天器惯性参数在轨辨识[J]. 西北工业大学学报, 2014, 32(5): 811-816.
|
|
WANG M, HUANG P F, CHANG H T, et al. On-orbit identification of inertia parameters of compound spacecraft using space manipulator[J]. Journal of Northwestern Polytechnical University, 2014, 32(5): 811-816 (in Chinese).
|
| 14 |
张博, 梁斌, 王学谦, 等. 基于自适应反作用零空间控制的大型非合作目标动力学参数实时辨识仿真[J]. 机器人, 2016, 38(1): 98-106.
|
|
ZHANG B, LIANG B, WANG X Q, et al. Simulation of real-time dynamic parameter identification for large non-cooperative targets using adaptive reaction null space control[J]. Robot, 2016, 38(1): 98-106 (in Chinese).
|
| 15 |
MENG Q L, LIANG J X, MA O. Identification of all the inertial parameters of a non-cooperative object in orbit[J]. Aerospace Science and Technology, 2019, 91: 571-582.
|
| 16 |
CHU Z Y, MA Y, HOU Y Y, et al. Inertial parameter identification using contact force information for an unknown object captured by a space manipulator[J]. Acta Astronautica, 2017, 131: 69-82.
|
| 17 |
马卫华, 袁大钟, 孟思洋, 等. 黏附激励下空间目标惯性参数的辨识方法[J]. 宇航学报, 2019, 40(10): 1197-1204.
|
|
MA W H, YUAN D Z, MENG S Y, et al. Spacecraft inertial parameters identification method based on adhesion excitation[J]. Journal of Astronautics, 2019, 40(10): 1197-1204 (in Chinese).
|
| 18 |
WEI C, ZHANG Y, WANG H L, et al. Inertia parameter identification of space floating target during robotic exploratory grasping[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233(11): 4247-4260.
|
| 19 |
CHANG H T, HUANG P F, LU Z Y, et al. Inertia parameters identification for cellular space robot through interaction[J]. Aerospace Science and Technology, 2017, 71: 464-474.
|
| 20 |
何骁, 谭述君, 吴志刚. 大角度机动下带挠性附件航天器转动惯量在轨辨识[J]. 宇航学报, 2017, 38(9): 927-935.
|
|
HE X, TAN S J, WU Z G. On-orbit identification of the moment of inertia for a spacecraft with flexible appendages during a large-angle maneuver[J]. Journal of Astronautics, 2017, 38(9): 927-935 (in Chinese).
|
| 21 |
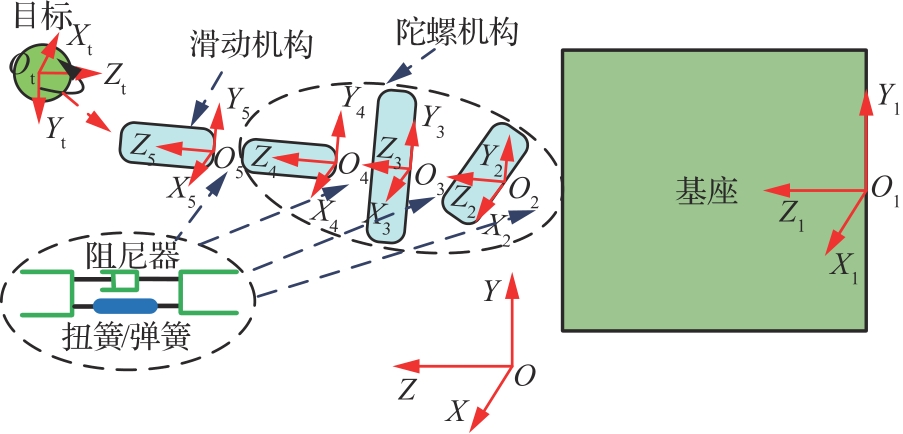
徐升, 褚明, 孙汉旭. 一种空间软对接仿生手腕设计与仿真[J]. 机械工程学报, 2022, 58(13): 59-70.
|
|
XU S, CHU M, SUN H X. Design and simulation of spatially soft-docking bionic wrist[J]. Journal of Mechanical Engineering, 2022, 58(13): 59-70 (in Chinese).
|
 ), 蔺绍奇, 常睿, 孙汉旭
), 蔺绍奇, 常睿, 孙汉旭