Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (9): 533224.doi: 10.7527/S1000-6893.2025.33224
• Special Issue: Safety Control Technology of Advanced Aircraft • Previous Articles Next Articles
Wenyu ZHOU1, Yingjie WANG2( ), Chenhao OUYANG1, Zixuan ZHENG1, Xiaokui YUE1
), Chenhao OUYANG1, Zixuan ZHENG1, Xiaokui YUE1
Received:2025-12-11
Revised:2026-01-23
Accepted:2026-04-21
Online:2026-05-15
Published:2026-04-28
Contact:
Yingjie WANG
E-mail:wang_yingjiexs@163.com
CLC Number:
Wenyu ZHOU, Yingjie WANG, Chenhao OUYANG, Zixuan ZHENG, Xiaokui YUE. Bearing-based collision-avoidance formation control of quadrotor UAVs under internal and external disturbances[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 533224.
Table 1
Glossary
| 符号 | 定义 |
|---|---|
| 集群通信拓扑无向图、节点集、边集 | |
| 集群中第i个无人机的邻居集 | |
| 无人机i与j之间的实时、期望方位角及其正交投影矩阵 | |
| 无人机集群方位Laplacian矩阵 | |
| 无人机i的状态、外部扰动 | |
无人机i的状态、外部扰动估计 无人机i的未建模动态及参数化表示 | |
| 无人机i的期望位置、速度、加速度 | |
| 无人机的偏航角、俯仰角、滚转角以及升力 | |
| 无人机i受到的未建模动态、外部扰动导致的扰动加速度 | |
| 无人机安全距离、安全时间 | |
| 无人机i与j障碍函数、倒数控制障碍函数 | |
| 无人机i CLF控制条件 | |
| 无人机i和无人机jRCBF控制条件 |

Fig.1
Bearing-based quadrotor formation control block diagram
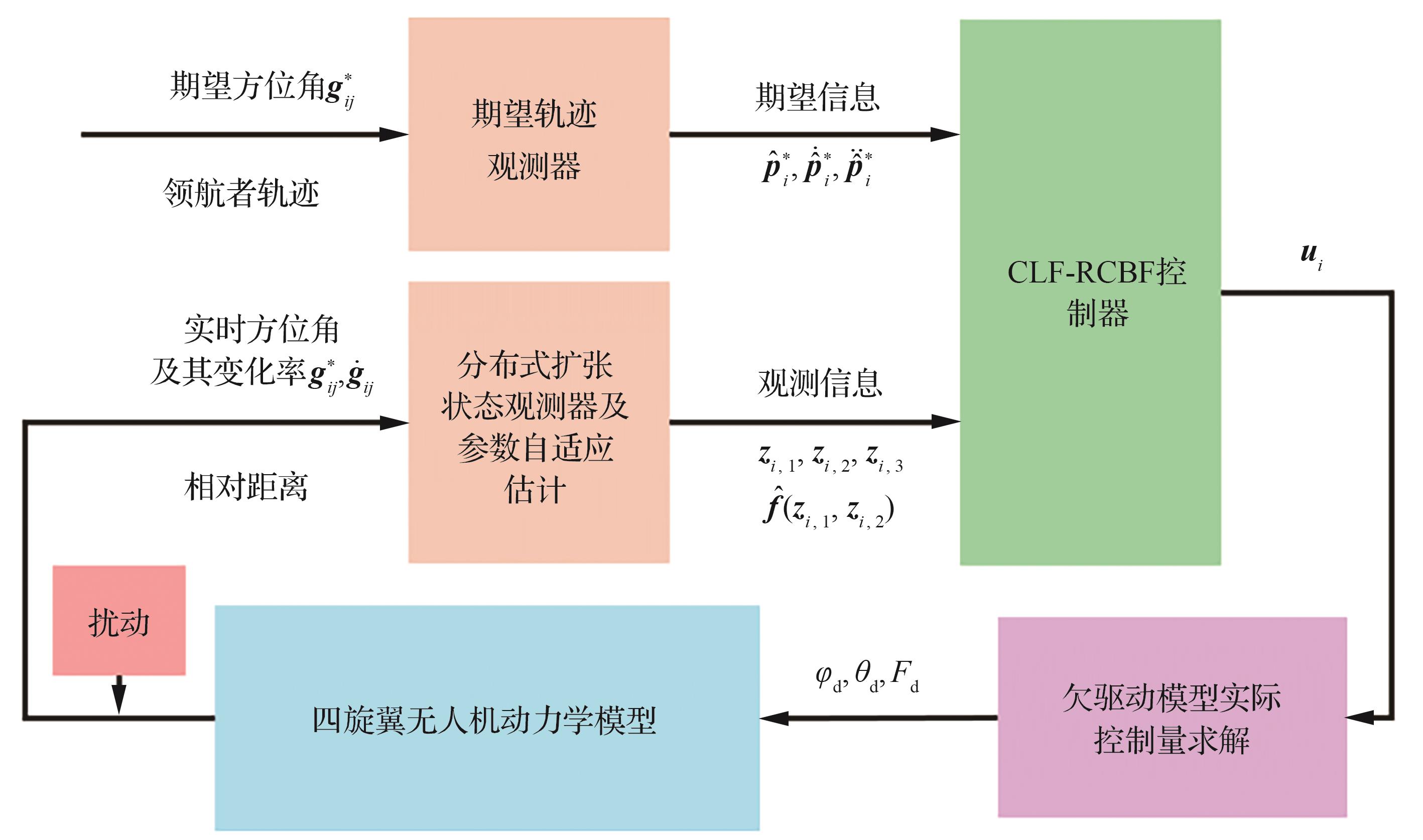
Table 2
Follower drone 3-8 initial position and speed
| 编号 | X/m | Y/m | Z/m | VX (m/s) | VY (m/s) | VZ (m/s) |
|---|---|---|---|---|---|---|
| 3 | 2.0 | 0.4 | 2.9 | 0 | 0 | 0.6 |
| 4 | 2.0 | 0.4 | 5.1 | 0 | 0 | -0.6 |
| 5 | 2.0 | 3.6 | 2.9 | 0 | 0 | 0.6 |
| 6 | 2.0 | 3.6 | 5.1 | 0 | 0 | -0.6 |
| 7 | 6.0 | 0.4 | 2.2 | -0.3 | 0.8 | 0 |
| 8 | 6.0 | 3.6 | 2.0 | -0.3 | -0.8 | 0 |
Fig.2
Formation flight simulation results of quadrotors and formation snapshots at four time instants (t=0,10,20,50 s)
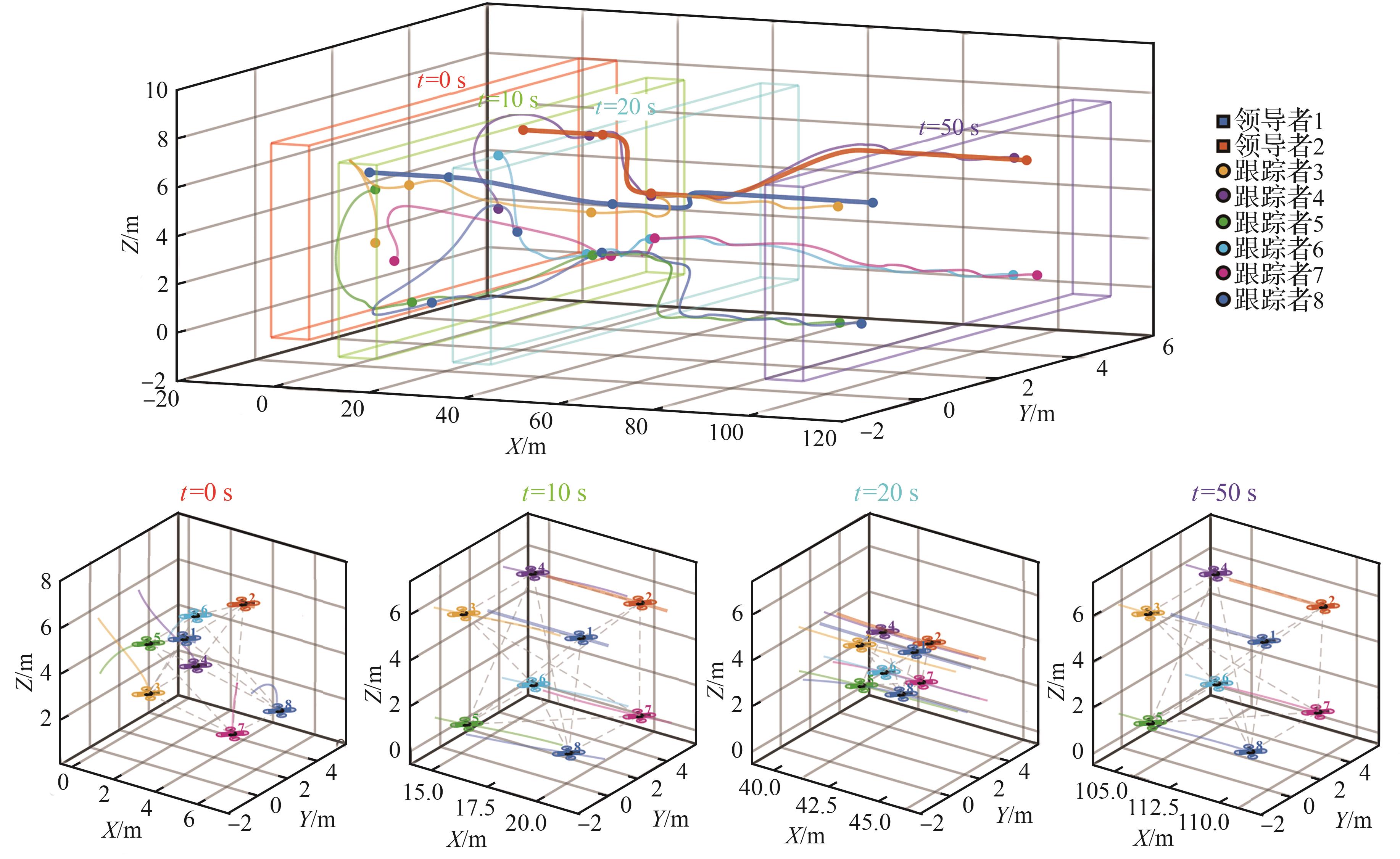
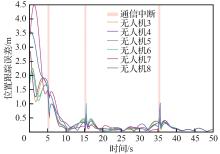
Fig.3
Absolute value of follower formation desired position tracking error
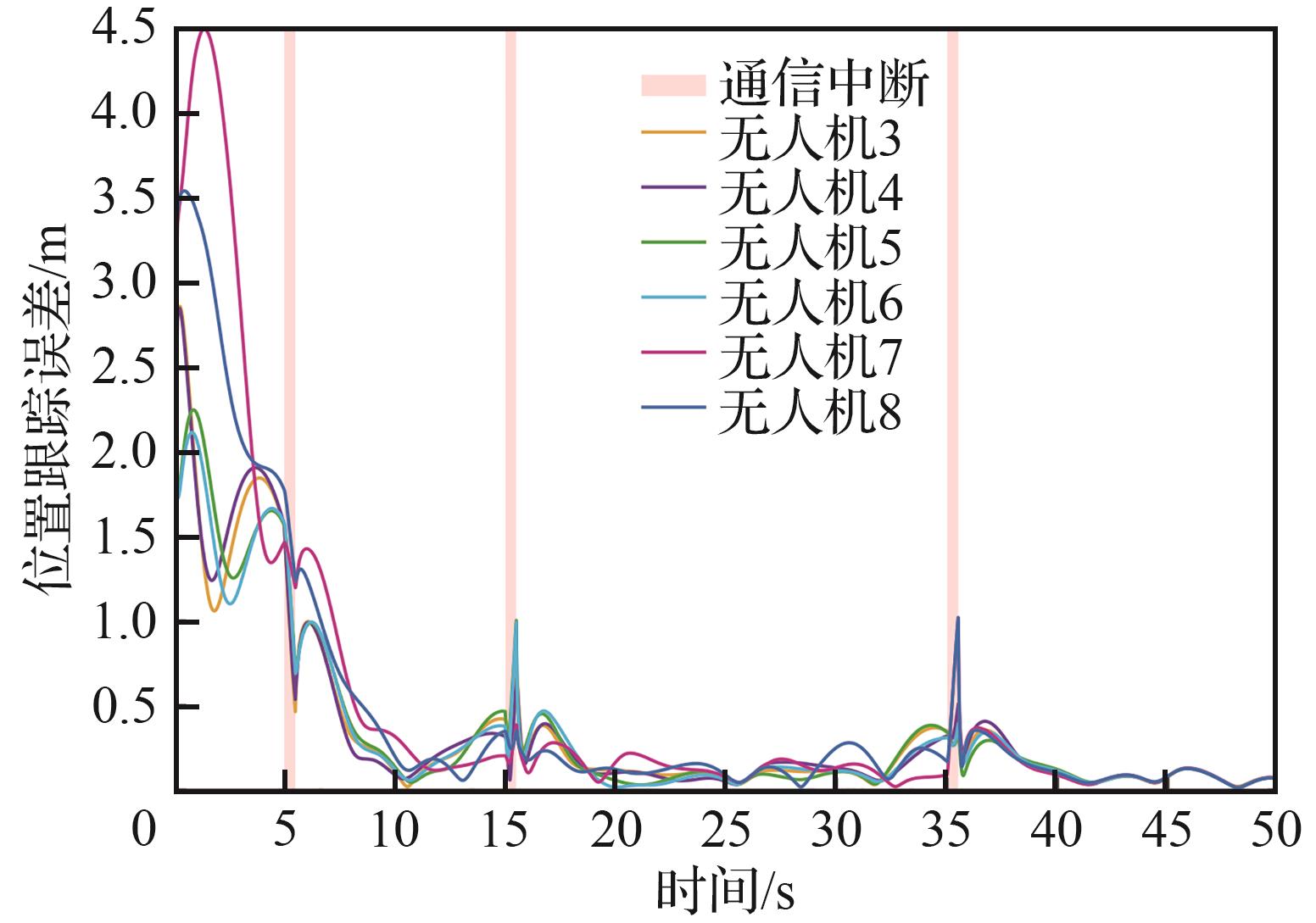
Fig.4
Absolute value of follower formation’s desired speed tracking error
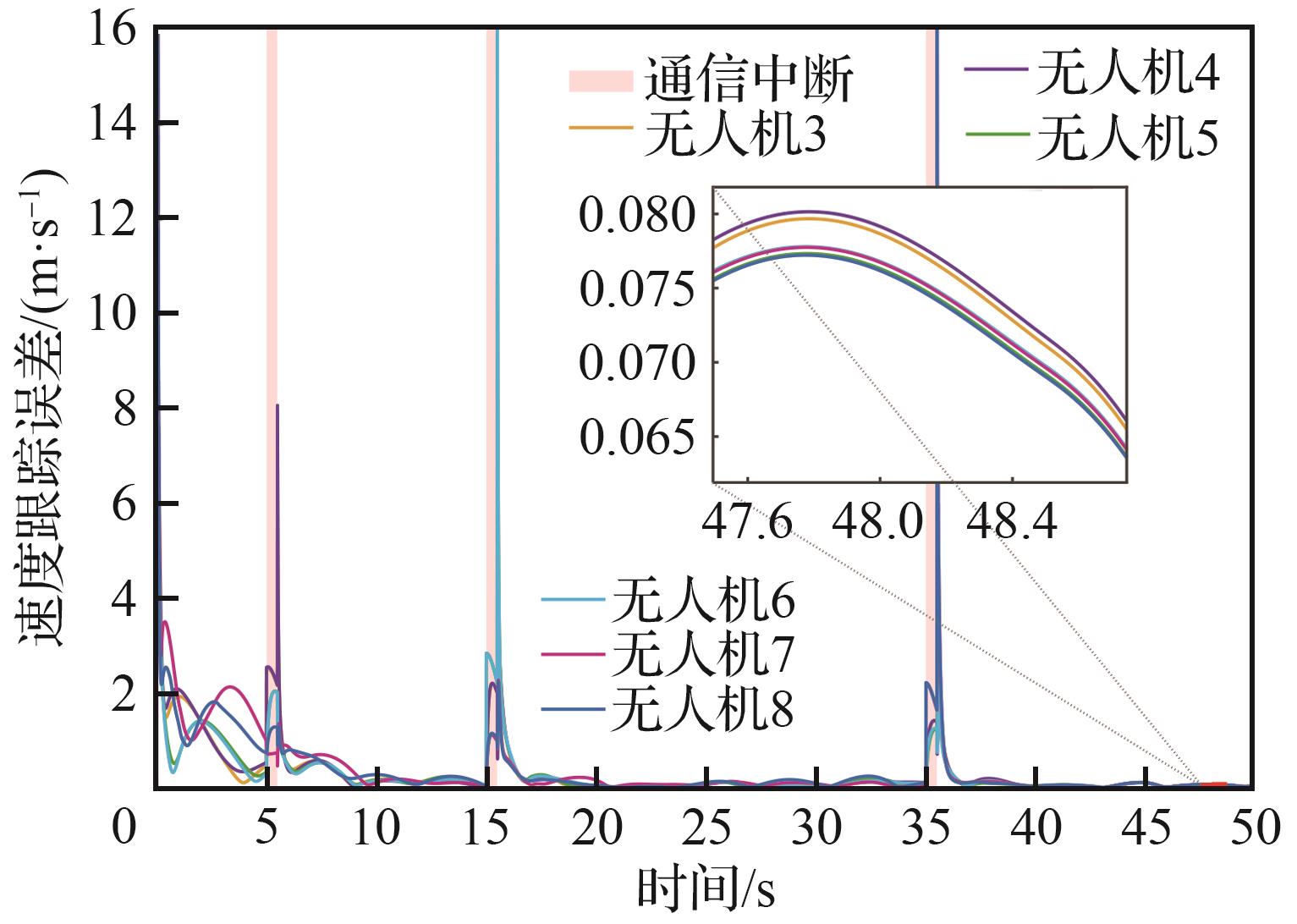
Fig.5
Absolute value of position estimation error of extended state observer
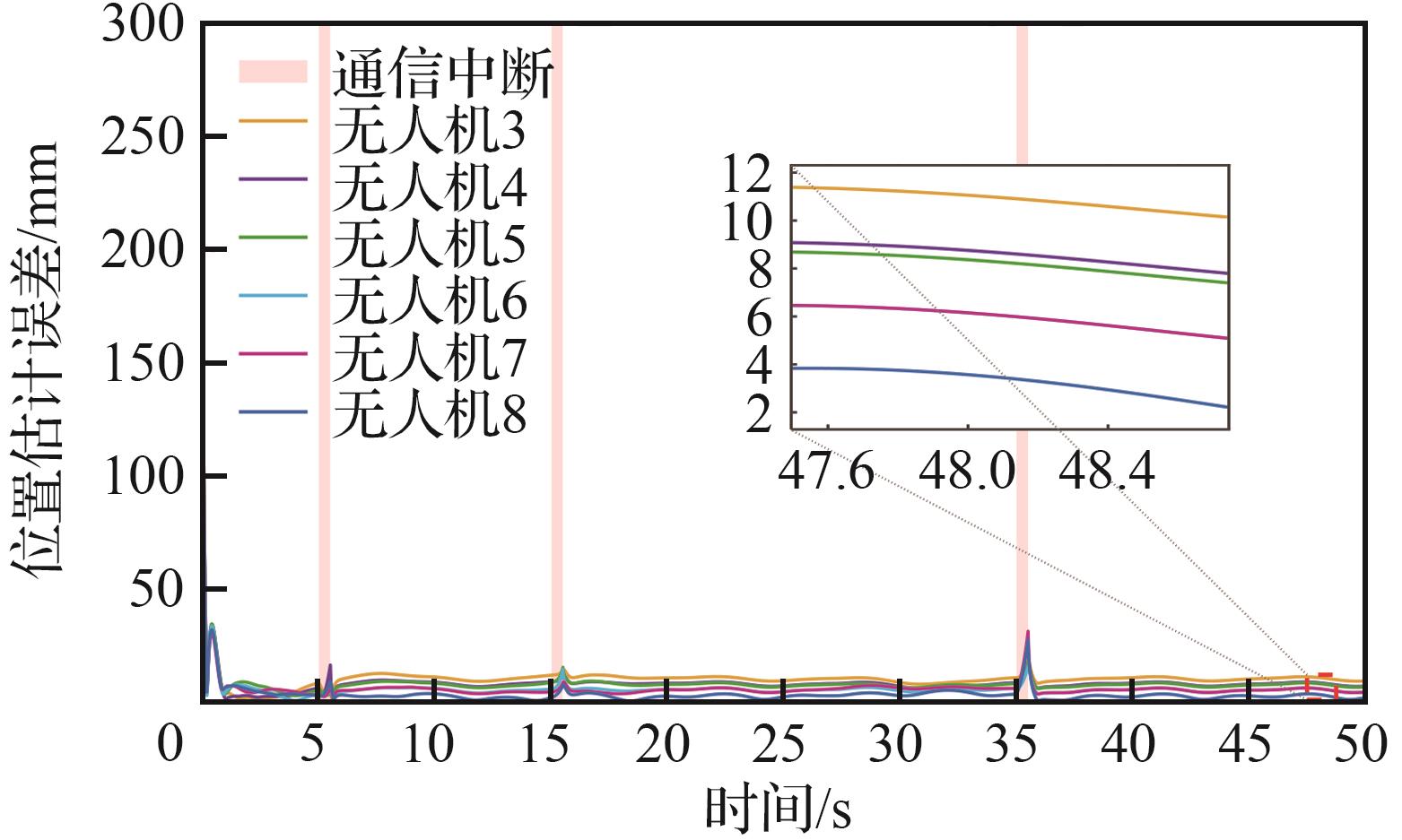
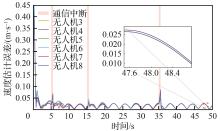
Fig.6
Absolute value of speed estimation error of extended state observer
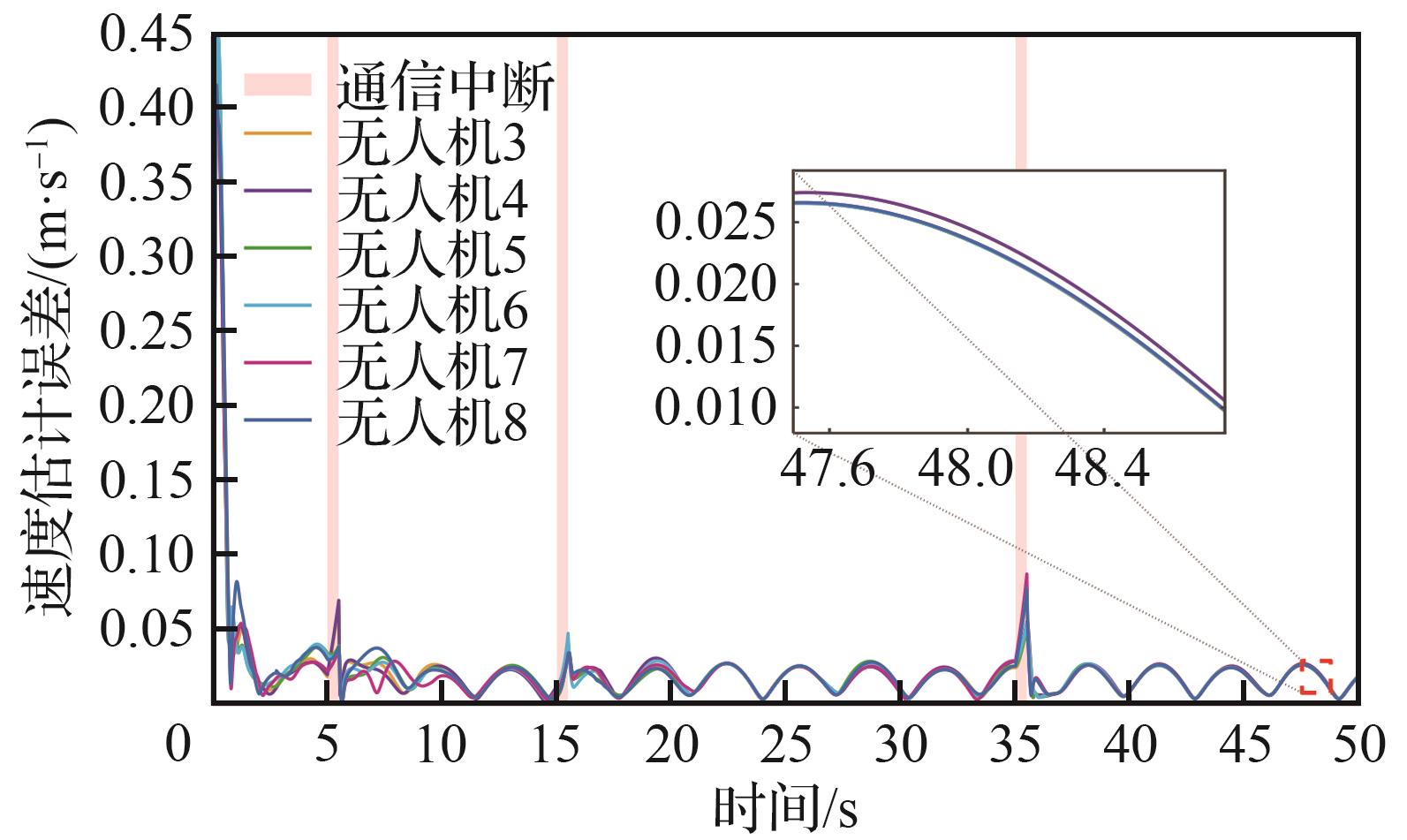
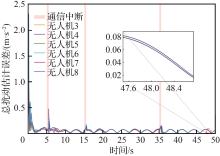
Fig.7
Absolute value of disturbances estimation error of extended state observer and adaptive estimation
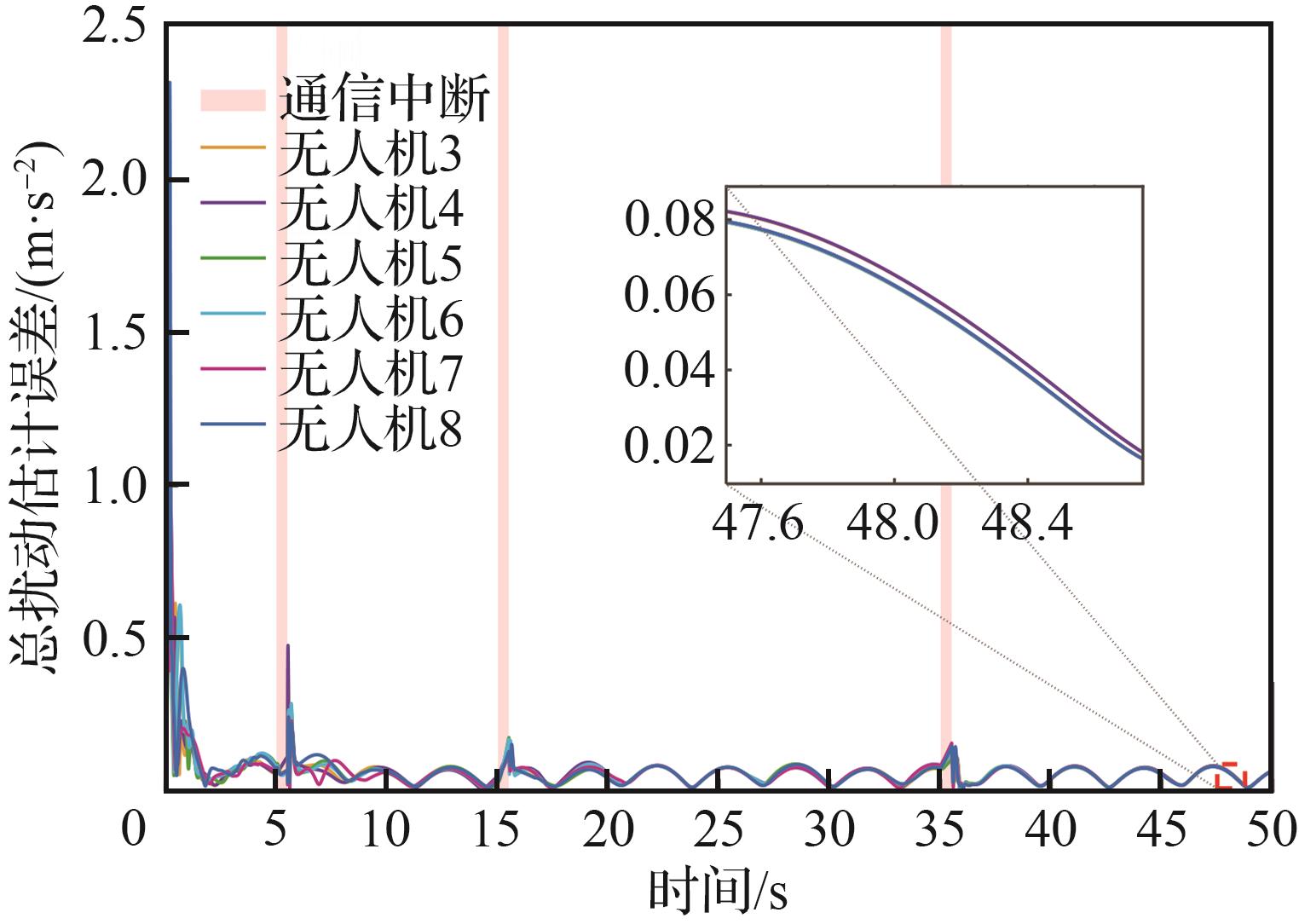
Fig.8
Comparison of position and velocity tracking errors of quadrotor during formation
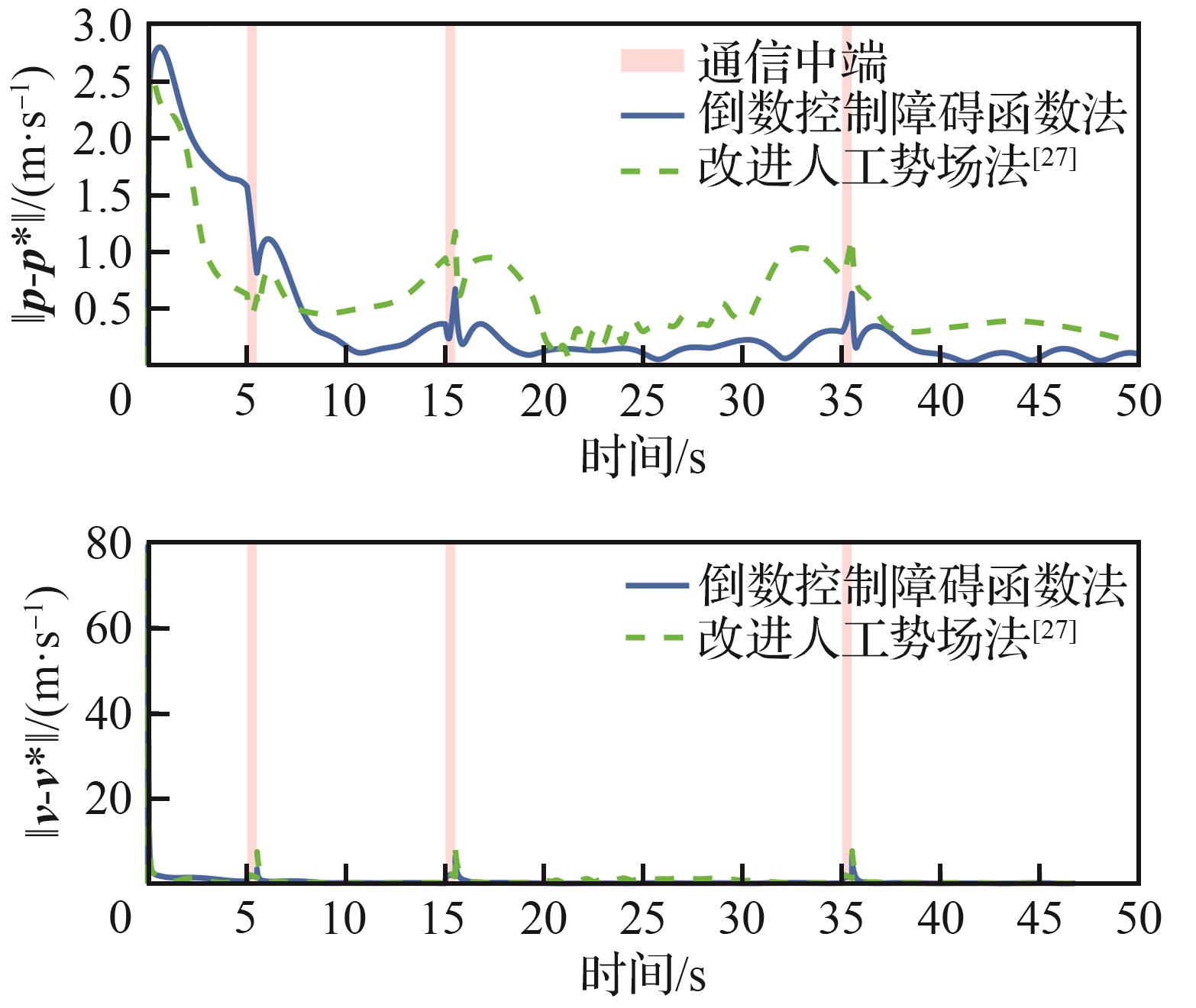
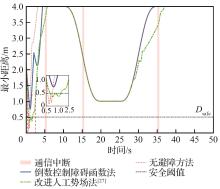
Fig.9
Comparison of minimum distance of quadrotor during formation
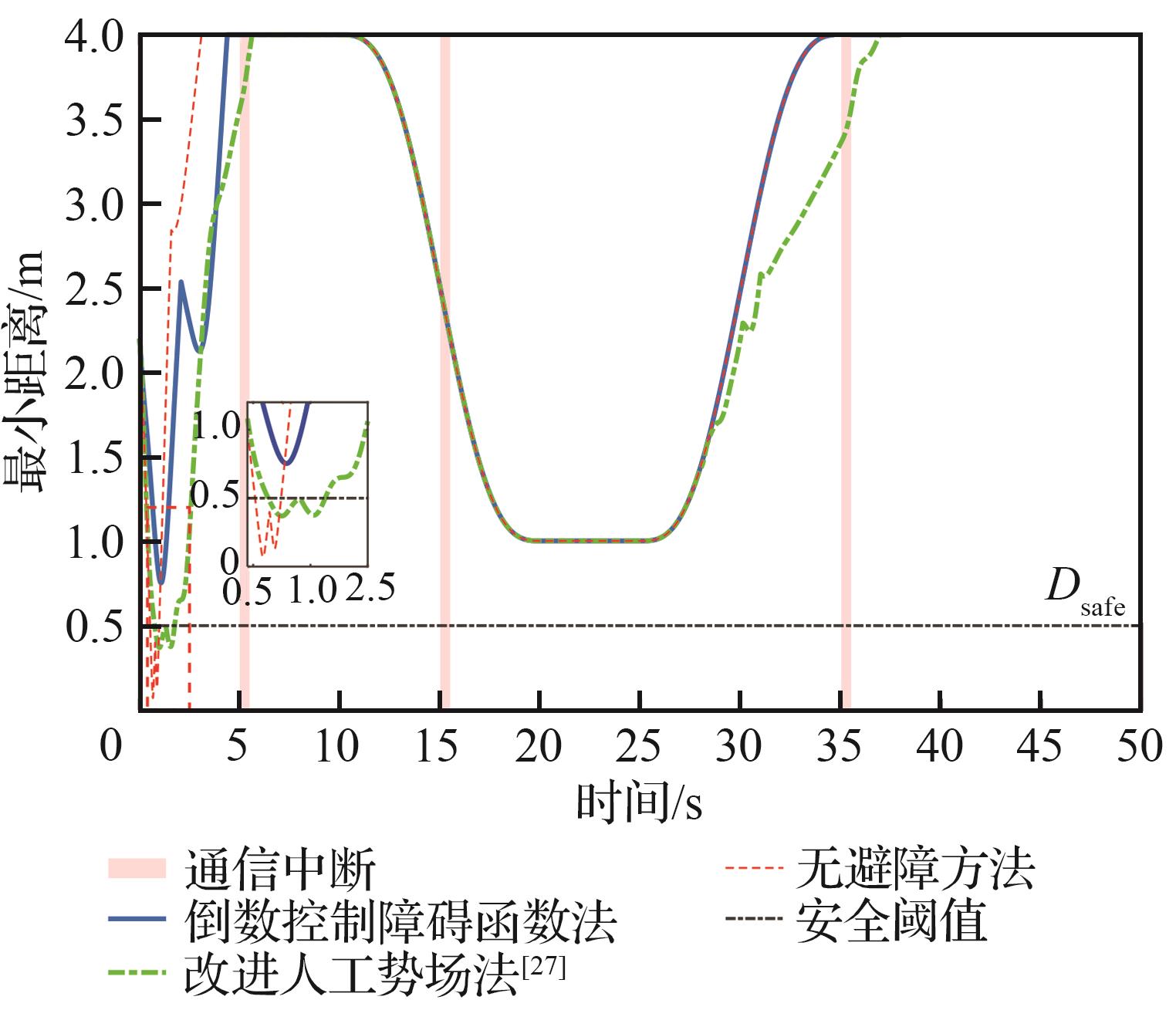
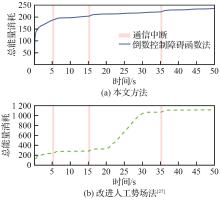
Fig.10
Comparison of energy consumption of quadrotor during formation
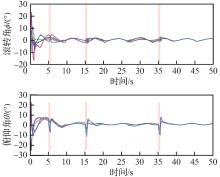
Fig.11
Attitude angle variation of quadrotor during formation
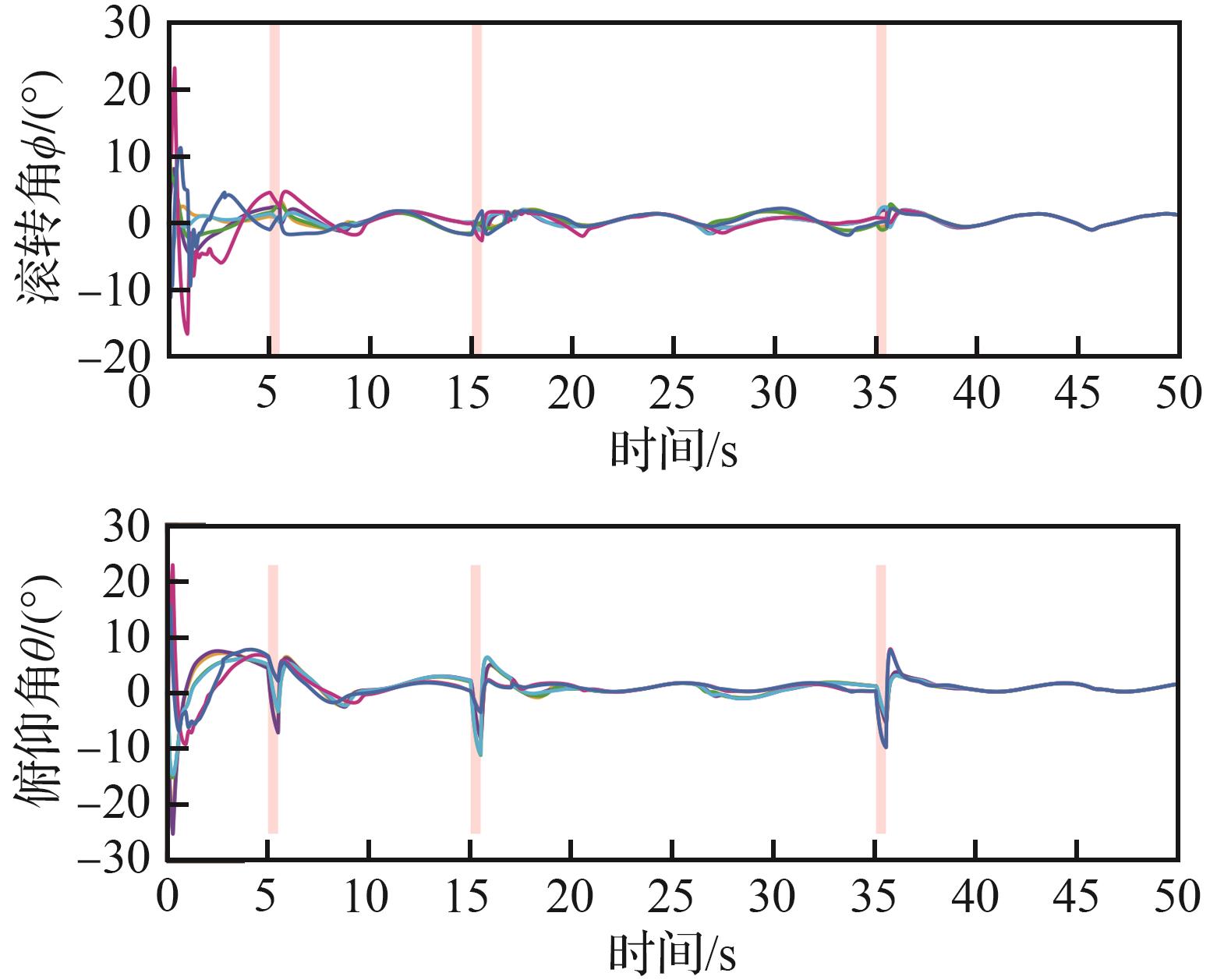
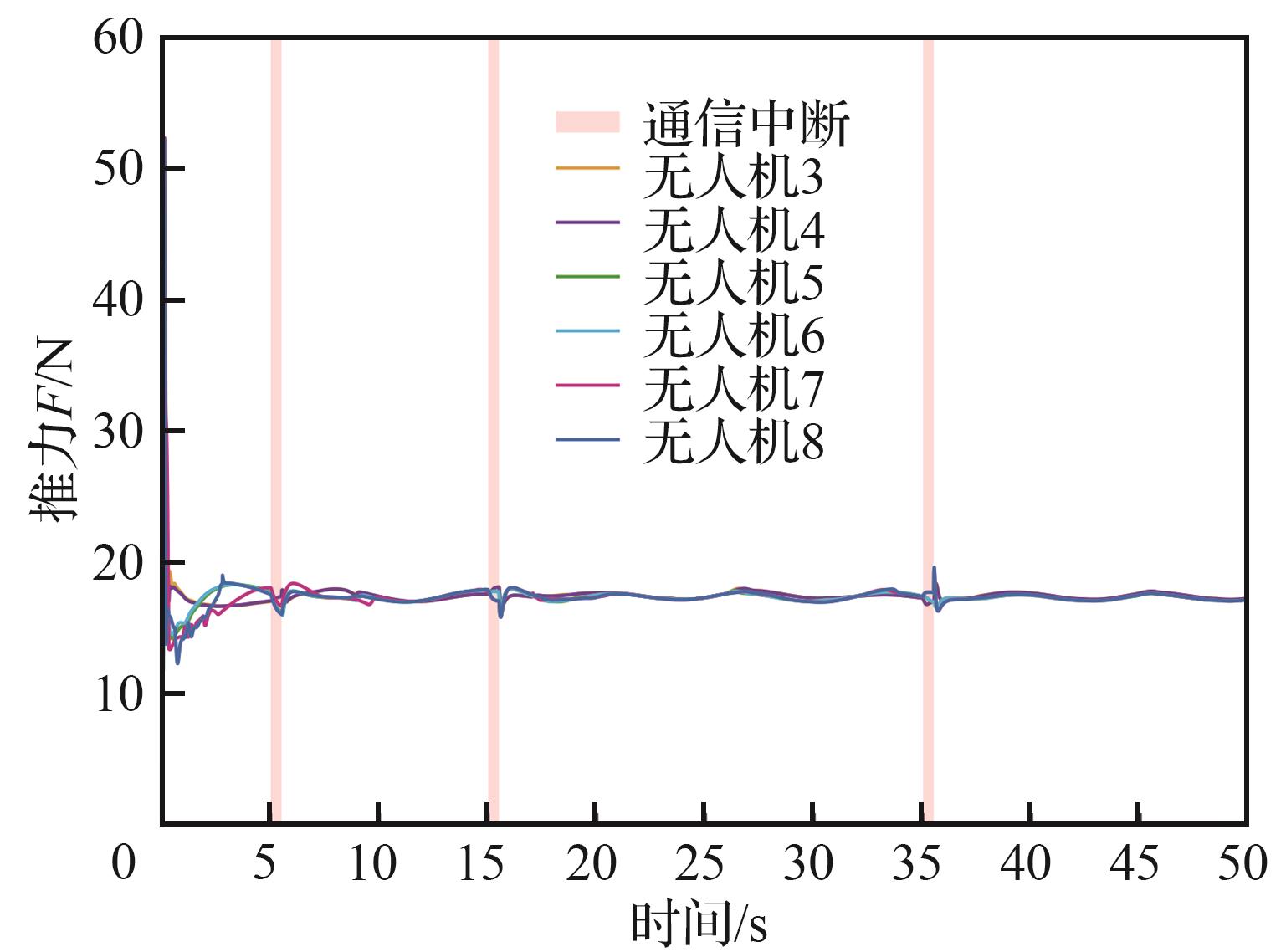
Fig.12
Thrust variation of quadrotor during formation
| [1] | 杨明月, 寿莹鑫, 唐勇, 等. 多四旋翼无人机编队保持与避碰控制[J]. 航空学报, 2022, 43(S1): 726913. |
| YANG M Y, SHOU Y X, TANG Y, et al. Multi-quadrotor UAVs formation maintenance and collision avoidance control[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(S1): 726913 (in Chinese). | |
| [2] | TANG Z Q, CUNHA R, HAMEL T, et al. Formation control of a leader-follower structure in three dimensional space using bearing measurements[J]. Automatica, 2021, 128: 109567. |
| [3] | ZHAO S Y, ZELAZO D. Translational and scaling formation maneuver control via a bearing-based approach[J]. IEEE Transactions on Control of Network Systems, 2017, 4(3): 429-438. |
| [4] | LI Z H, TNUNAY H, ZHAO S Y, et al. Bearing-only formation control with prespecified convergence time[J]. IEEE Transactions on Cybernetics, 2022, 52(1): 620-629. |
| [5] | SU H F, CHEN C L, YANG Z W, et al. Bearing-based formation tracking control with time-varying velocity estimation[J]. IEEE Transactions on Cybernetics, 2023, 53(6): 3961-3973. |
| [6] | ERSKINE J, BALDERAS-HILL R, FANTONI I, et al. Model predictive control for dynamic quadrotor bearing formations[C]∥ 2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2021: 124-130. |
| [7] | DING C, ZHANG Z, MIAO Z Q, et al. Event-based finite-time formation tracking control for UAV with bearing measurements[J]. IEEE Transactions on Industrial Electronics, 2025, 72(7): 7482-7492. |
| [8] | KHALID A, MUSHTAQ Z, ARIF S, et al. Control schemes for quadrotor UAV: Taxonomy and survey[J]. ACM Computing Surveys, 2023, 56(5): 1-32. |
| [9] | 许海涛,陈龙胜,王宇翔,等. 四旋翼无人机编队飞行路径规划及分布式协同控制[J/OL]. 控制理论与应用, (2025-07-17) [2025-12-11]. . |
| XU H T, CHWN L S, WANG X Y, et al.Path planning and distributed cooperative control for quadrotor UAV formations flight[J/OL]. Control Theory Applications, (2025-07-17) [2025-12-11]. . | |
| [10] | LI C, LIU J P, CHEN X K, et al. Fuzzy observer-based finite-time adaptive formation control for multiple QUAVs with malicious attacks[J]. IEEE Transactions on Fuzzy Systems, 2024, 32(11): 6500-6511. |
| [11] | MULIADI J, KUSUMOPUTRO B. Neural network control system of UAV altitude dynamics and its comparison with the PID control system[J]. Journal of Advanced Transportation, 2018, 2018(1): 3823201. |
| [12] | YAO P, WANG H L, SU Z K. Real-time path planning of unmanned aerial vehicle for target tracking and obstacle avoidance in complex dynamic environment[J]. Aerospace Science and Technology, 2015, 47: 269-279. |
| [13] | 王羿, 叶辉, 杨晓飞. 基于无源性与势场法的四旋翼避障与位置控制[J]. 航空学报, 2023, 44(S1): 727492. |
| WANG Y, YE H, YANG X F. A position control and obstacle avoidance method for quadrotor via approach based on passivity and artificial potential filed[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727492 (in Chinese). | |
| [14] | AMES A D, XU X R, GRIZZLE J W, et al. Control barrier function based quadratic programs for safety critical systems[J]. IEEE Transactions on Automatic Control, 2017, 62(8): 3861-3876. |
| [15] | TAN X, CORTEZ W S, DIMAROGONAS D V. High-order barrier functions: Robustness, safety, and performance-critical control[J]. IEEE Transactions on Automatic Control, 2022, 67(6): 3021-3028. |
| [16] | 付俊杰, 林潇坤, 温广辉. 基于高阶控制障碍函数的多固定翼无人机鲁棒避障安全编队跟踪控制[J]. 机器人, 2025, 47(1): 85-98. |
| FU J J, LIN X K, WEN G H. Robust obstacle avoidance and safe formation tracking control for multiple fixed-wing UAVs based on high-order control barrier functions[J]. Robot, 2025, 47(1): 85-98 (in Chinese). | |
| [17] | LI J, KANG H L, LI J F, et al. Bearing-based collision-free formation control for spacecrafts under dynamic event-triggered input[J]. IEEE Transactions on Automation Science and Engineering, 2025, 22: 14855-14866. |
| [18] | WANG Z J, HU T F, LONG L J. Multi-UAV safe collaborative transportation based on adaptive control barrier function[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(11): 6975-6983. |
| [19] | LI C, WANG Y J, YANG X B. Adaptive fuzzy control of a quadrotor using disturbance observer[J]. Aerospace Science and Technology, 2022, 128: 107784. |
| [20] | JEON H, SONG J, LEE H, et al. Modeling quadrotor dynamics in a wind field[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(3): 1401-1411. |
| [21] | Khromov V, Rand O. Ground effect modeling for rotary-wing simulation[C]∥26th International Congress of the Aeronautical Sciences. Bonn: International Council of the Aeronautical Sciences, 2008: 1-10. |
| [22] | YANG Y, ZHANG H H. Neural network-based adaptive fractional-order backstepping control of uncertain quadrotors with unknown input delays[J]. Fractal and Fractional, 2023, 7(3): 232. |
| [23] | ARSLAN K M, ZHAO L Y, XUE K J. Investigation of aerodynamic interference between vertically aligned quadcopters at varying rotor speeds and separations[J]. Drones, 2025, 9(10): 712. |
| [24] | SHUKLA D, KOMERATH N. Multirotor drone aerodynamic interaction investigation[J]. Drones, 2018, 2(4): 43. |
| [25] | JIN D Y, QIU R Y, QIU J B, et al. Prescribed performance control for a novel quadrotor based on the fully actuated system approach and an extended state observer[J]. Control Engineering Practice, 2026, 168: 106671. |
| [26] | CHENG H S, HUANG J. A general framework for the bearing-based formation control[J]. IEEE Transactions on Automatic Control, 2025, 70(6): 3603-3616. |
| [27] | SHENG H L, ZHANG J, YAN Z Y, et al. New multi-UAV formation keeping method based on improved artificial potential field[J]. Chinese Journal of Aeronautics, 2023, 36(11): 249-270. |
| [28] | KAMEL M, BURRI M, SIEGWART R. Linear vs nonlinear MPC for trajectory tracking applied to rotary wing micro aerial vehicles[J]. IFAC-PapersOnLine, 2017, 50(1): 3463-3469. |
| [1] | Xiaojuan WANG, Guangtai TIAN, Bin LI, Zhenqing HE. Fully actuated anti-disturbance control for quadrotor UAVs based on dynamic compensator [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 123-135. |
| [2] | Yuying GUO, Lanxin LIAO, Xiaoqiang ZHANG, Youmin ZHANG, Kai WANG. Finite-time fault-tolerant control of compound actuator faults for unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(4): 332659-332659. |
| [3] | Jiong HE, Binwu REN, Siliang DU, Yousong XU, Bo WANG. Adaptive attitude control for tilt-quadrotor UAV based on ADRC-RBF [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732189-732189. |
| [4] | Ni LI, Weijia LUO, Hao BAI, Fei LIAO, Changyin DONG. Design of a foldable cross-medium amphibious aerial and underwater vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(14): 231491-231491. |
| [5] | Tao CHEN, Jian CHEN. Learning-observer-based resilient fault-tolerant control for quadrotor unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531346-531346. |
| [6] | Yeping WANG, Honglei JI, Qingyu KANG, Haoxuan DENG, Chang WANG. Integration of multirotor aerodynamic interference in UAM flight dynamics model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531280-531280. |
| [7] | Hongzhen GUO, Mou CHEN, Yongdong DAI, Maofei WANG. Distributed adaptive event⁃triggered formation control for QUAVs [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729917-729917. |
| [8] | Chenyang LIU, Dawei WU, Yize GUO, Xinsai LV, Jiani ZHOU, Shuyi SHAO. Robust adaptive attitude control of quadrotor with uncertain strong coupling [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727645-727645. |
| [9] | Yi WANG, Hui YE, Xiaofei YANG. A position control and obstacle avoidance method for quadrotor via approach based on passivity and artificial potential filed [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727492-727492. |
| [10] | Xu ZHAO, Guoyuan QI, Xinchen YU, Jianbing HU, Xia LI. Compensation function observer and its application in flight vehicle attitude control [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327224-327224. |
| [11] | YANG Mingyue, SHOU Yingxin, TANG Yong, LIU Chang, XU Bin. Multi-quadrotor UAVs formation maintenance and collision avoidance control [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S1): 726913-726913. |
| [12] | SUN Yang, CHANG Min, BAI Junqiang. Trajectory planning and control for micro-quadrotor perching on vertical surface [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 325756-325756. |
| [13] | LI Xia, QI Guoyuan, GUO Xitong, ZHAO Xu. High-order differential feedback control and its application in quadrotor UAV [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(12): 326047-326047. |
| [14] | GUO Hongzhen, CHEN Mou. Safety formation control of quadrotor UAVs based on prescribed performance [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(8): 525789-525789. |
| [15] | SHAO Shuyi, CHEN Mou, ZHAO Qijun. Discrete-time fault-tolerant control for quadrotor UAV based on disturbance observer [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724283-724283. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341