Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (9): 532465.doi: 10.7527/S1000-6893.2025.32465
• Special Issue: Safety Control Technology of Advanced Aircraft • Previous Articles Next Articles
Yu JIN1, Xia YANG1, Lei ZHANG1, Jiacheng TANG1, Bo ZHU2( )
)
Received:2025-06-24
Revised:2025-10-31
Accepted:2025-12-15
Online:2026-05-15
Published:2025-12-29
Contact:
Bo ZHU
E-mail:zhubo@nju.edu.cn
Supported by:CLC Number:
Yu JIN, Xia YANG, Lei ZHANG, Jiacheng TANG, Bo ZHU. Enhanced ERG-based control framework: Module design and experimental validation[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532465.
Table 1
Related work on constrained control
| 控制方案 | 文献 | 特点 |
|---|---|---|
| 模型预测控制 | [ | 最优控制性能;约束处理能力强;计算复杂度高 |
| 基于障碍李氏函数的控制 | [ | 保证状态约束满足;处理非对称约束复杂 |
| 抗积分饱和控制 | [ | 增强系统稳定性,有效应对输入约束;状态约束处理困难 |
| 基于参考管理器的控制 | [ | 在线优化维度低,计算负担小;可兼容现有控制器,无需重新设计整个控制系统 |
Fig.1
Quanser 2-DOF helicopter experimental platform
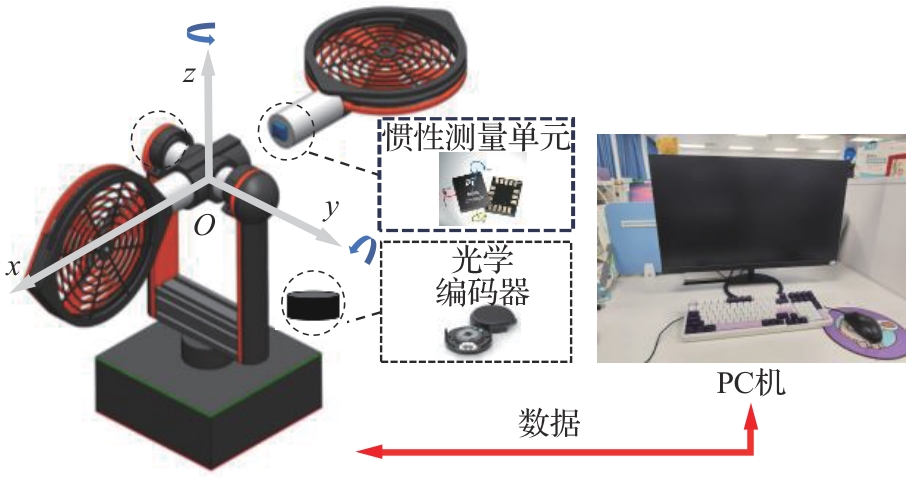
Fig.2
Block diagram of proposed control scheme
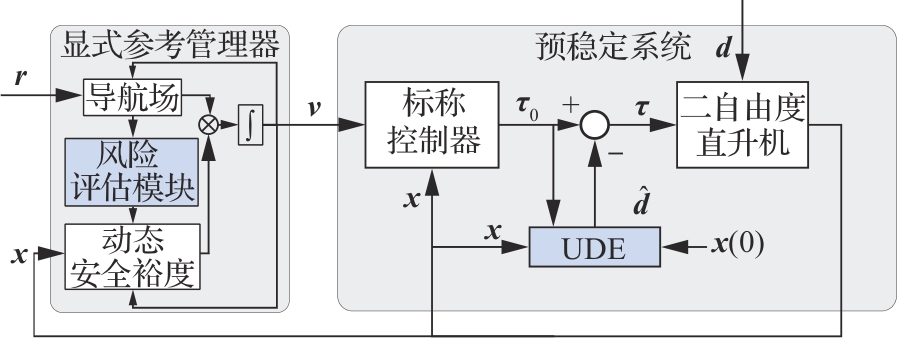
Table 2
Simulation parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 0.021 88 | 0.1 | ||
| 0.005 72 | 27 | ||
| 0.037 7 | 1 | ||
| 1 | 0.01 | ||
| -1 | 0.01 | ||
| 0.1 | 0.02 | ||
| -0.1 | 0.001 | ||
| 5 | 0.002 | ||
| 3 | 5 |

Fig.3
Simulation results of ERG pitch channel
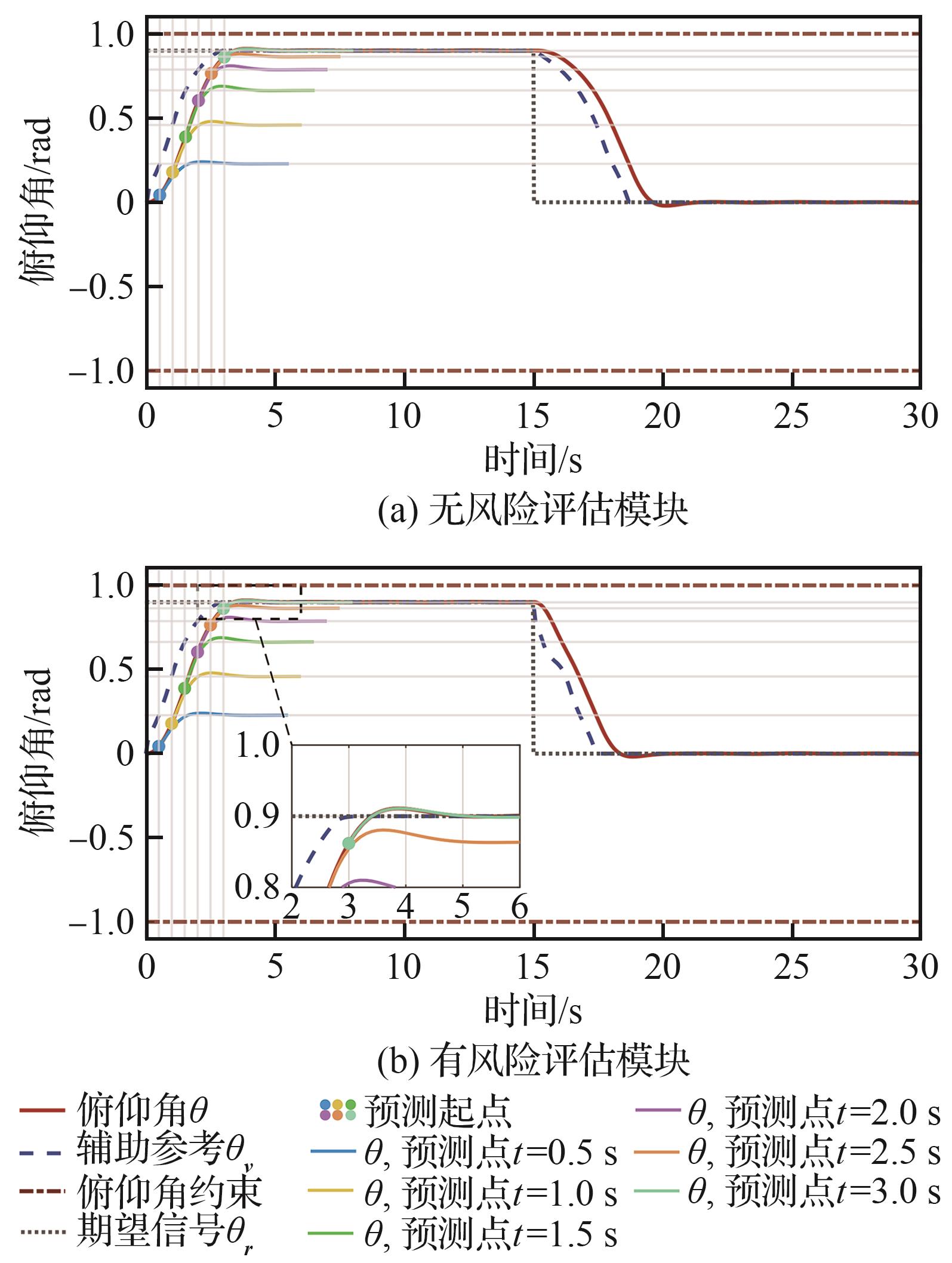
Fig.4
Simulation results of dynamic safety margin
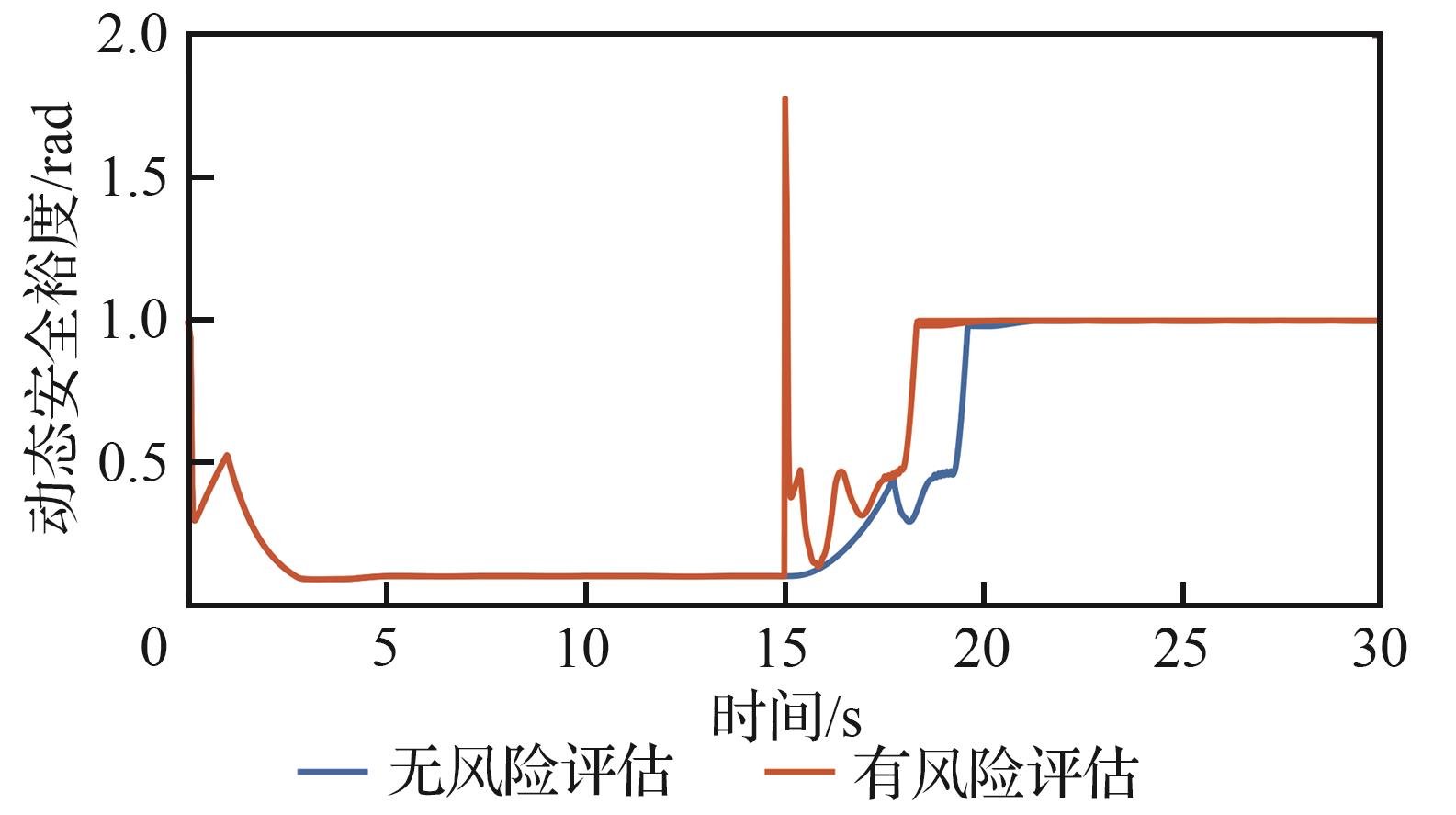
Fig.5
Simulation results of input torque
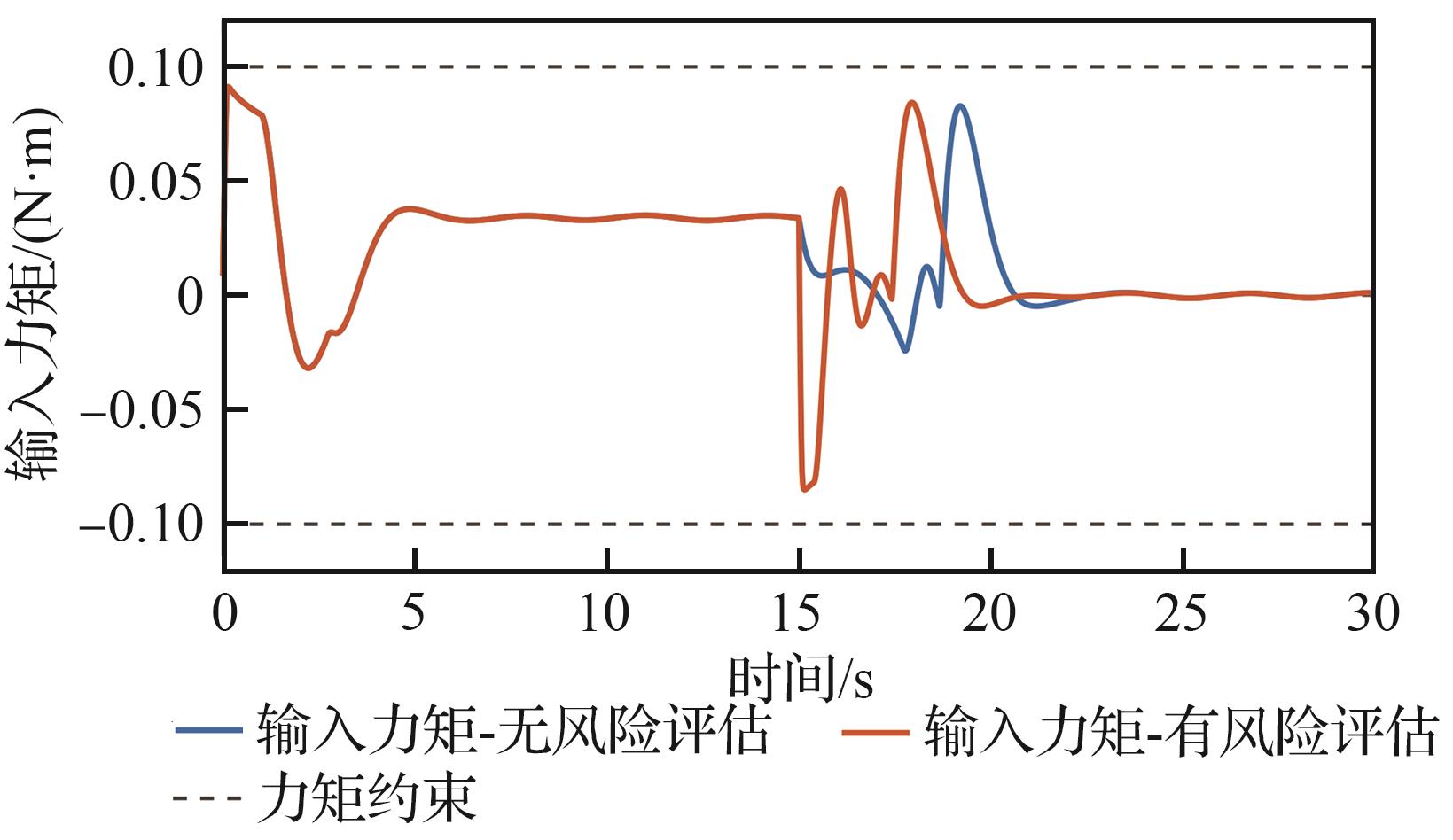
Table 3
Simulation results of statistical indicators of the second maneuver phase
| 评估模块 | 无风险评估模块 | 有风险评估模块 |
|---|---|---|
| 调整时间/s | 5.24 | 3.2 |
| 辅助参考收敛时间/s | 3.64 | 2.4 |
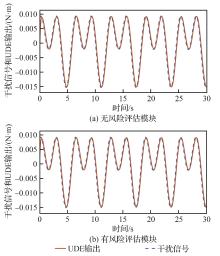
Fig.6
Estimation results of UDE
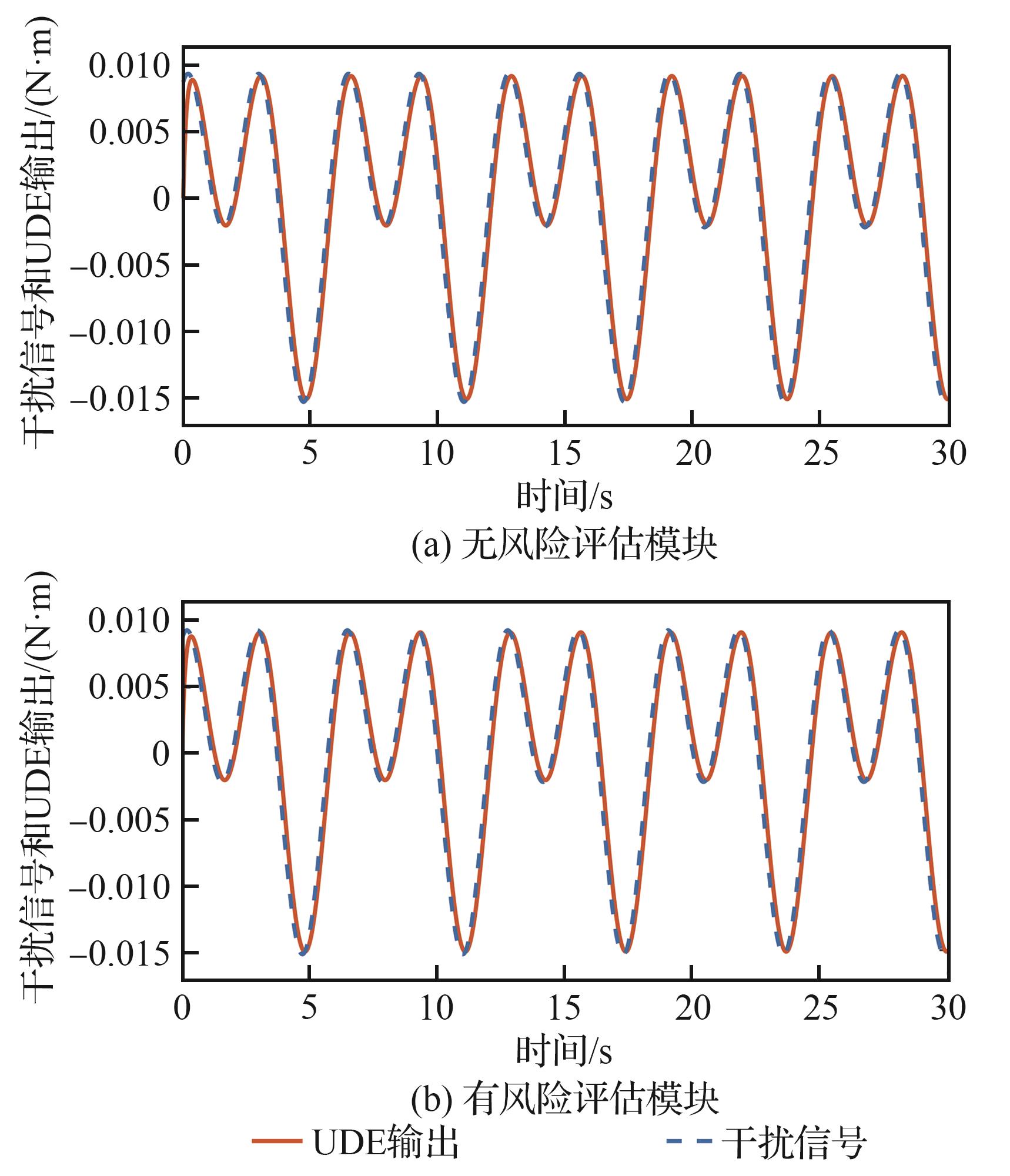
Table 4
Parameter of helicopter platform
| 参数 | 数值 |
|---|---|
| 0.021 88 | |
| 0.005 72 | |
| 0.037 7 | |
| 0.022 | |
| 0.022 |
Table 5
Constraint parameter of helicopter platform
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 1 | -0.045 2 | ||
| -1 | 0.052 8 | ||
| 0.045 2 | -0.052 8 |
Table 6
Controller parameter
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 5 | 0.02 | ||
| 3 | 3.77×10-4 | ||
| 6 | 7.54×10-4 | ||
| 5.8 | 0.7 | ||
| 0.25 | 400 | ||
| 0.1 | 0.01 | ||
| 24 | 0.01 | ||
| 1 | 0.02 | ||
| 5 | 3.77×10-4 | ||
| 0.01 | 7.54×10-4 | ||
| 0.01 |
Fig.7
Pitch channel of Experiment case 1
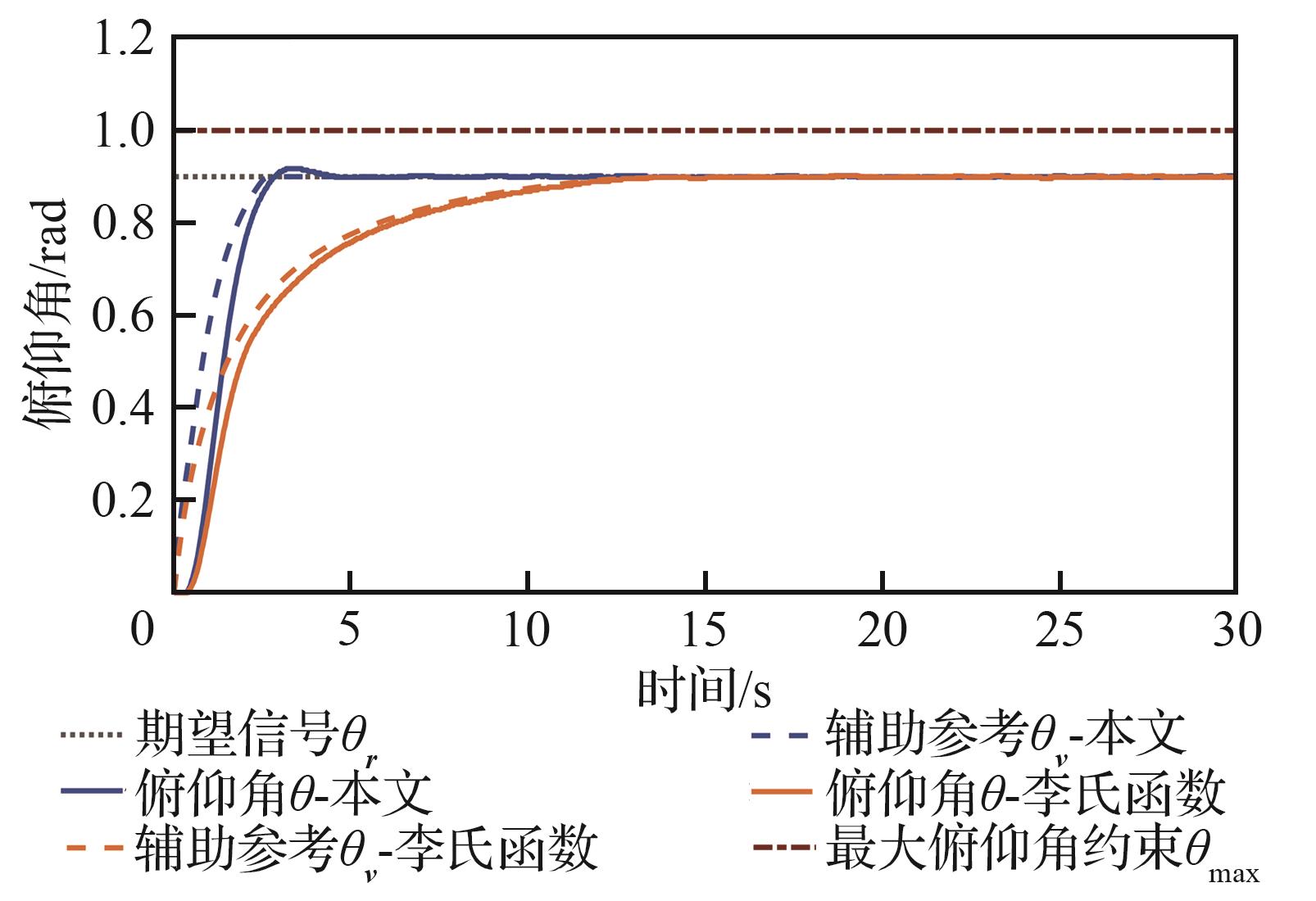
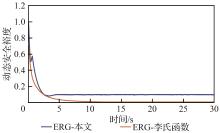
Fig.8
Dynamic safety margin of Experiment case 1
Table 7
Statistical indicators of Experiment case 1
| 方法 | 基于李氏函数的ERG | 本文增强型ERG |
|---|---|---|
| 辅助参考收敛时间/s | 10.68 | 2.4 |
| DSM平均计算耗时/(10-7 s) | 6.466 | 37.77 |
Fig.9
Elapsed time for dynamic safety margin calculation of Experiment case 1
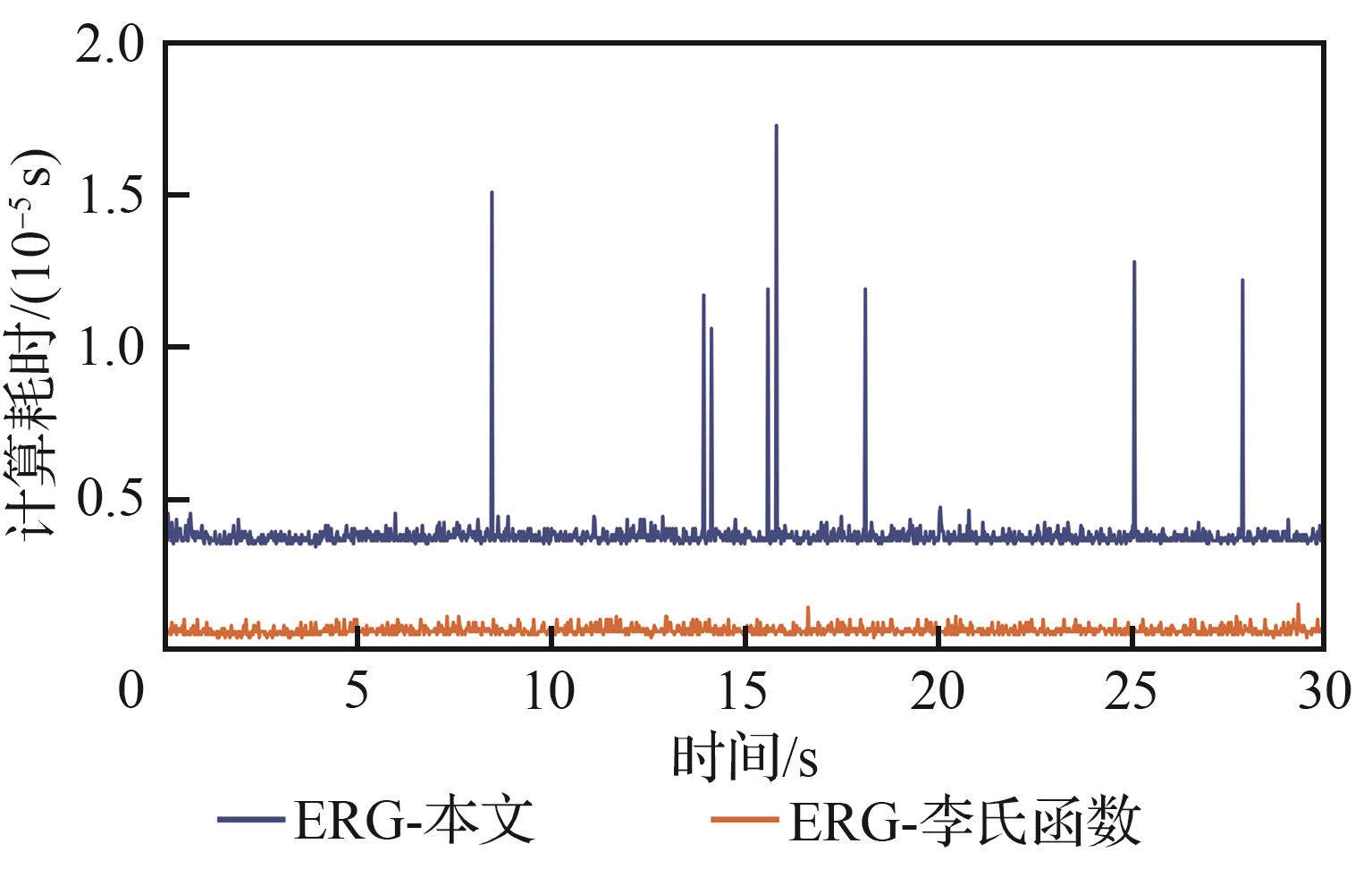

Fig.10
Pitch channel results of Experimental case 2
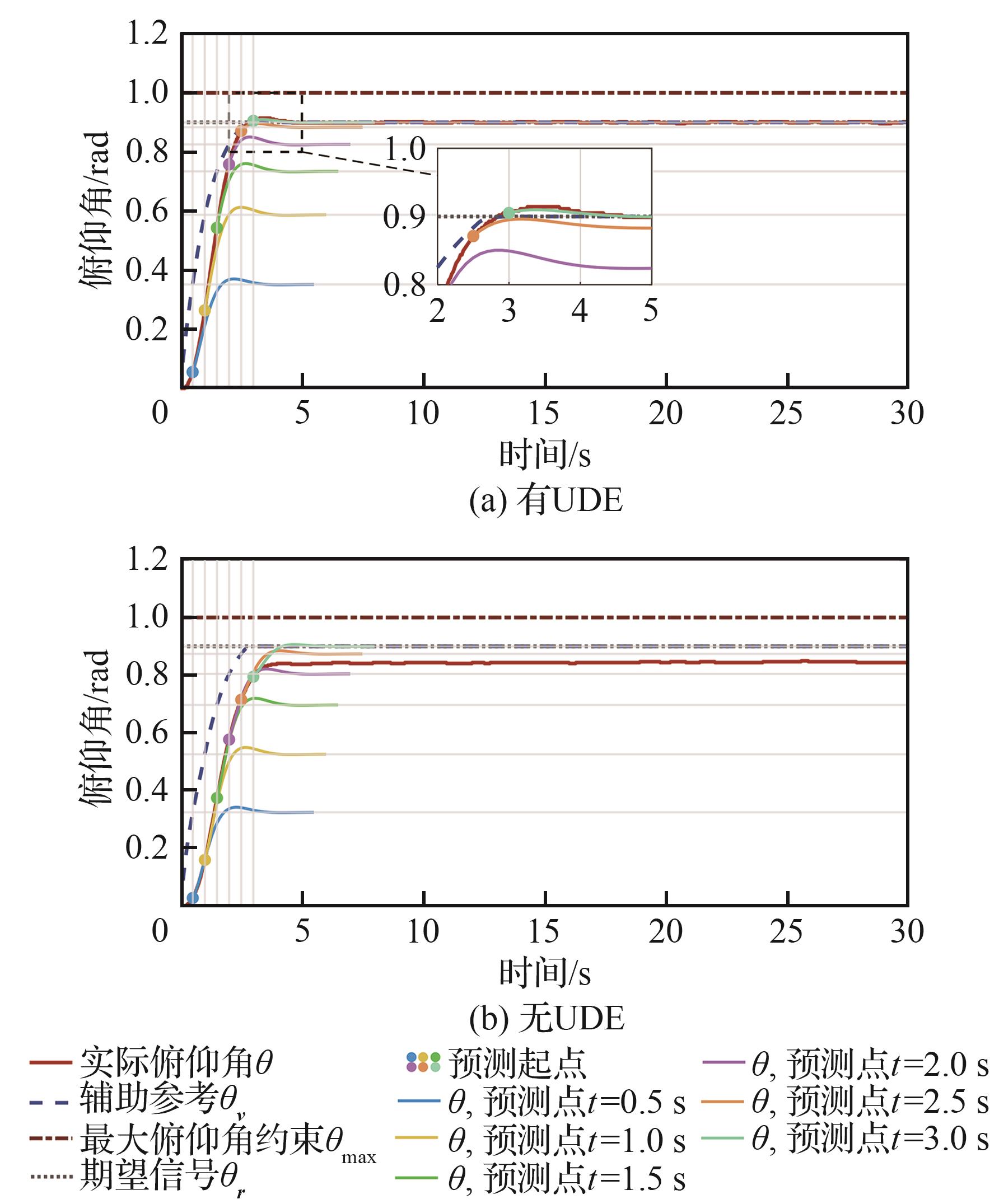

Fig.11
Yaw channel results of Experimental case 2
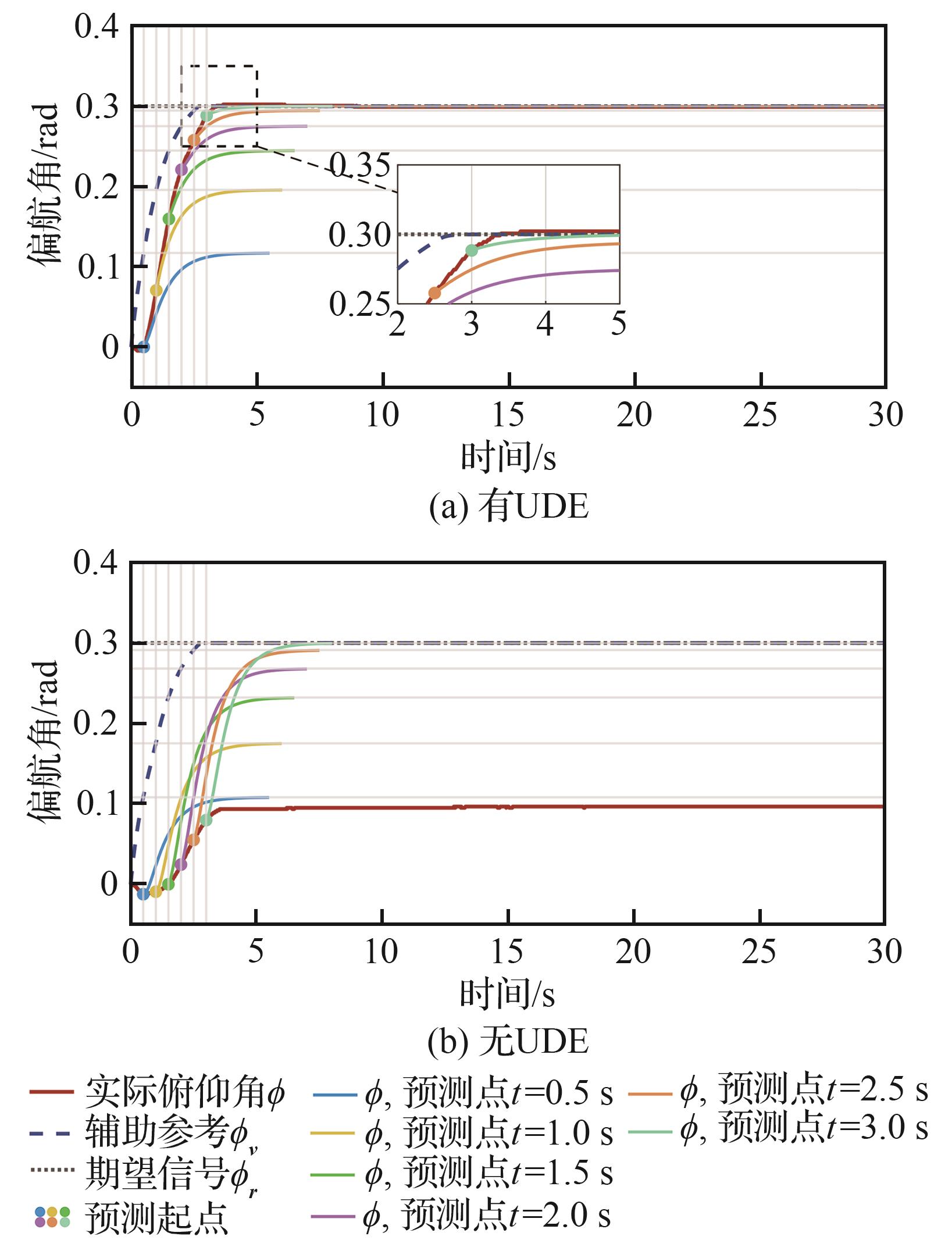
Fig.12
Dynamic safety margin of Experimental case 2
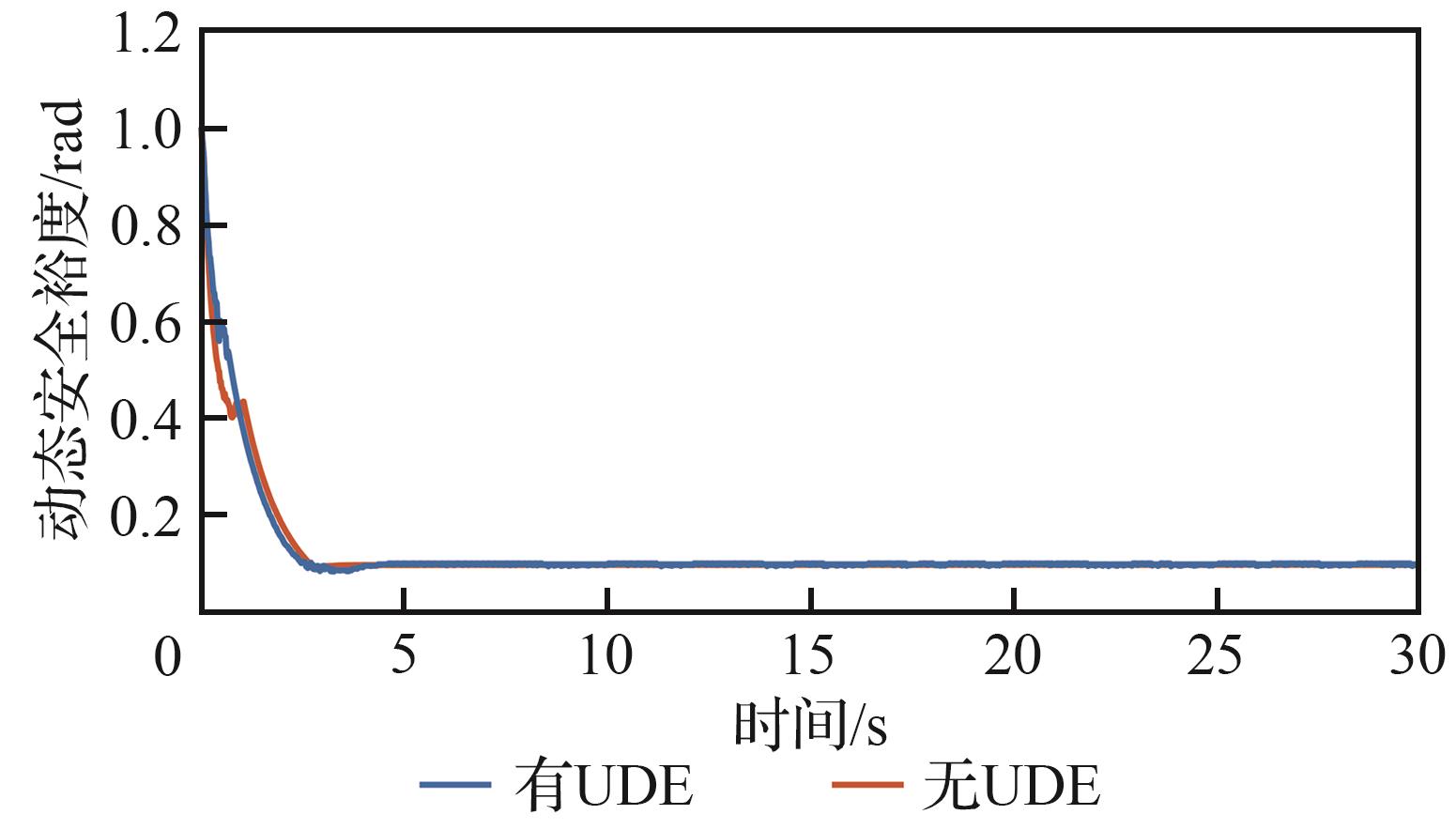
Fig.13
Control input torque of Experimental case 2
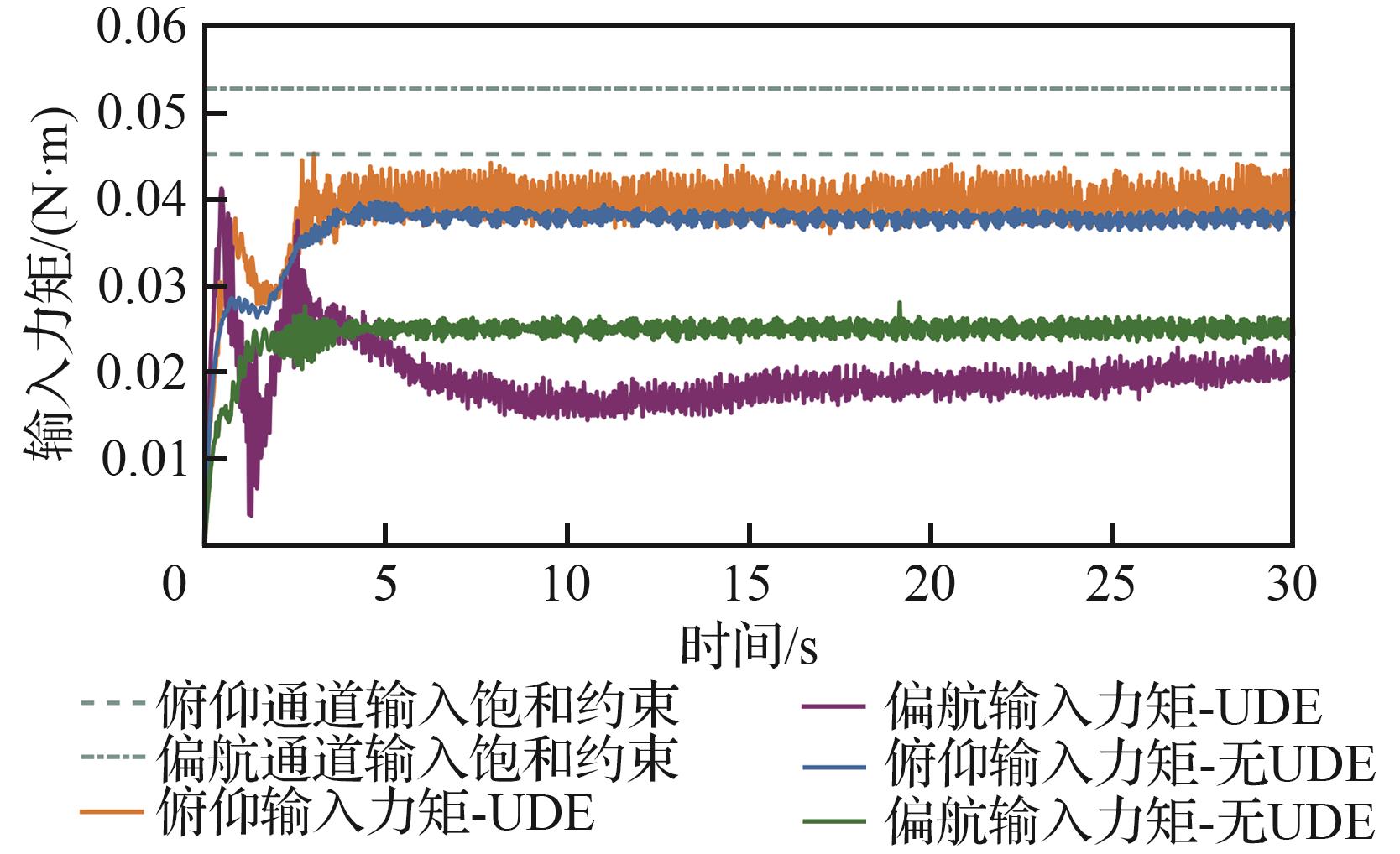
Fig.14
UDE output of Experimental case 2
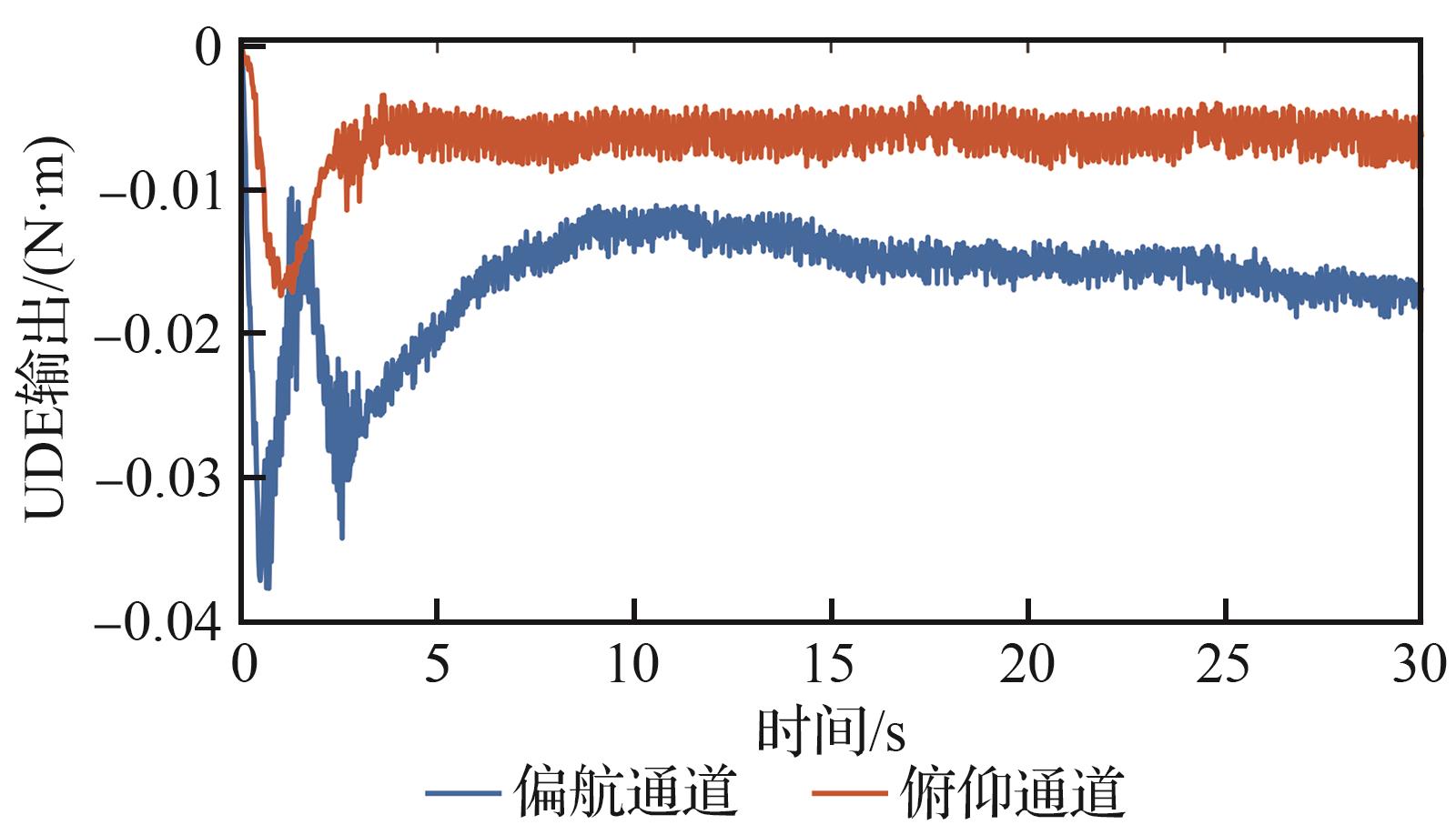
Table 8
Statistical indicators of Experimental case 2
| 统计指标 | 无UDE | 有UDE | ||
|---|---|---|---|---|
俯仰 通道 | 偏航 通道 | 俯仰 通道 | 偏航 通道 | |
| 稳态下RMSE/rad | 0.055 6 | 0.203 6 | 0.001 7 | 0.000 9 |
| 轨迹预测RMSE/rad | 0.055 4 | 0.174 0 | 0.002 0 | 0.003 2 |

Fig.15
Pitch channel results of Experimental case 3
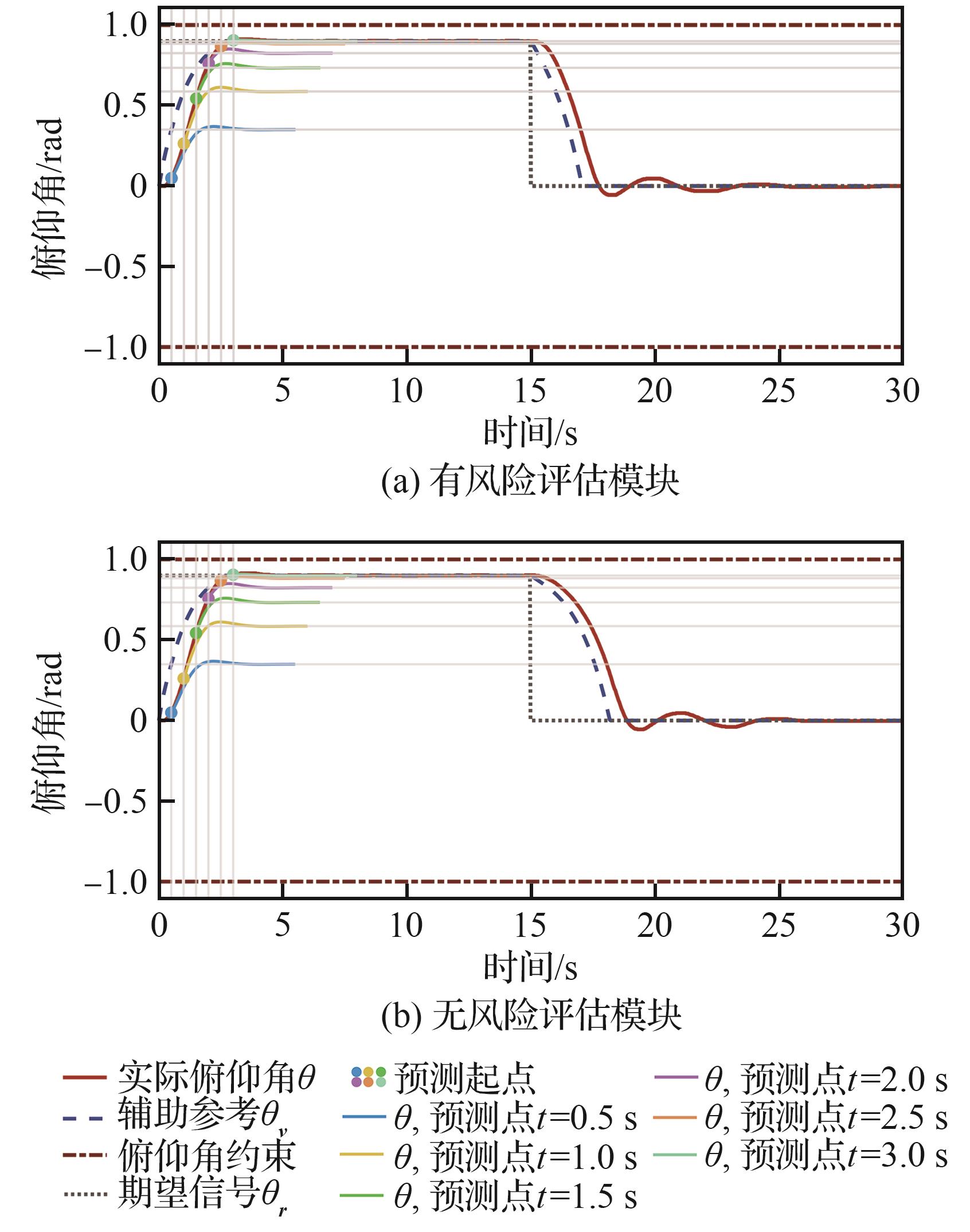

Fig.16
Yaw channel results of Experimental case 3
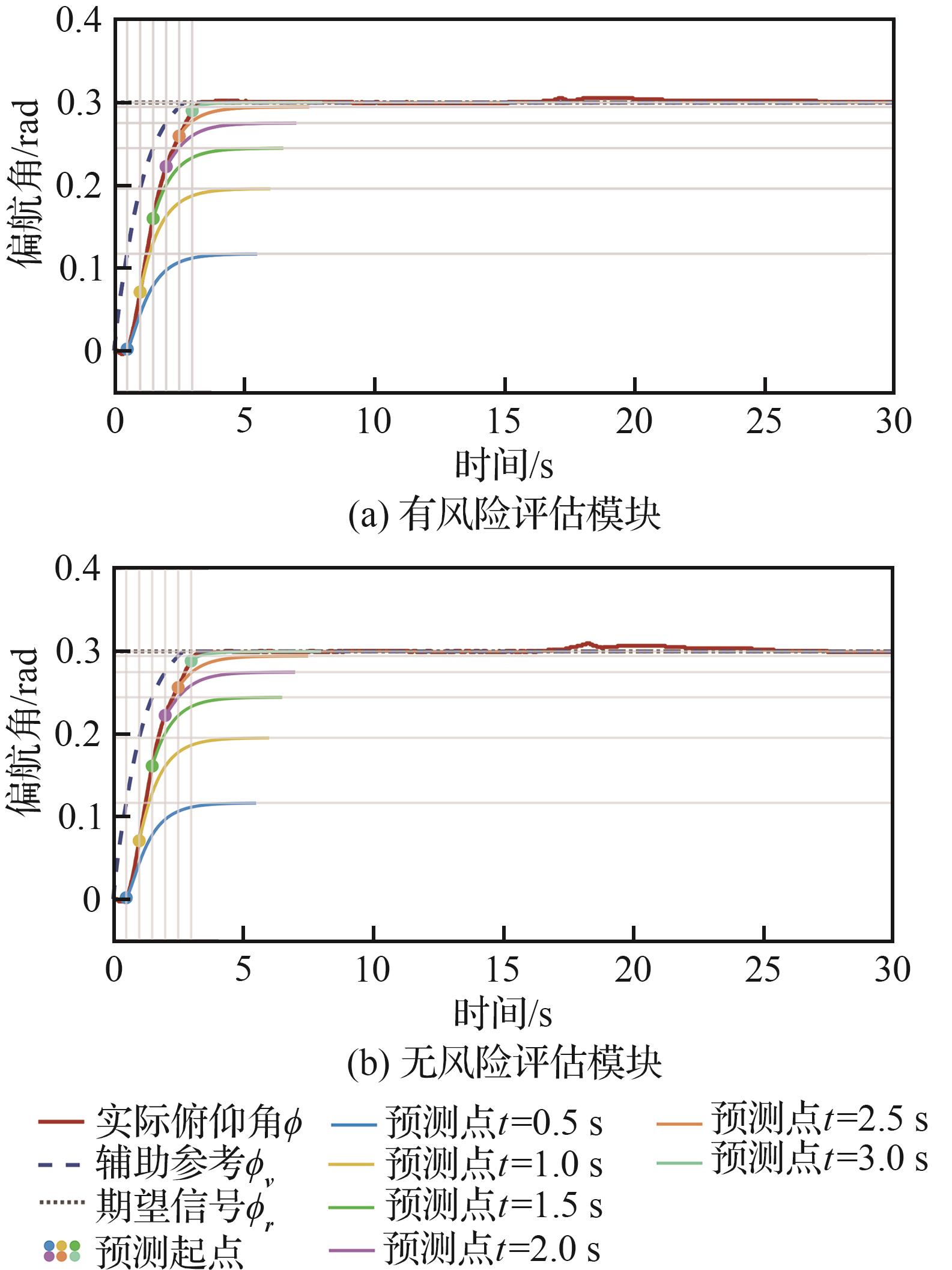
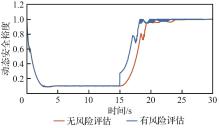
Fig.17
Dynamic safety margin of Experimental case 3
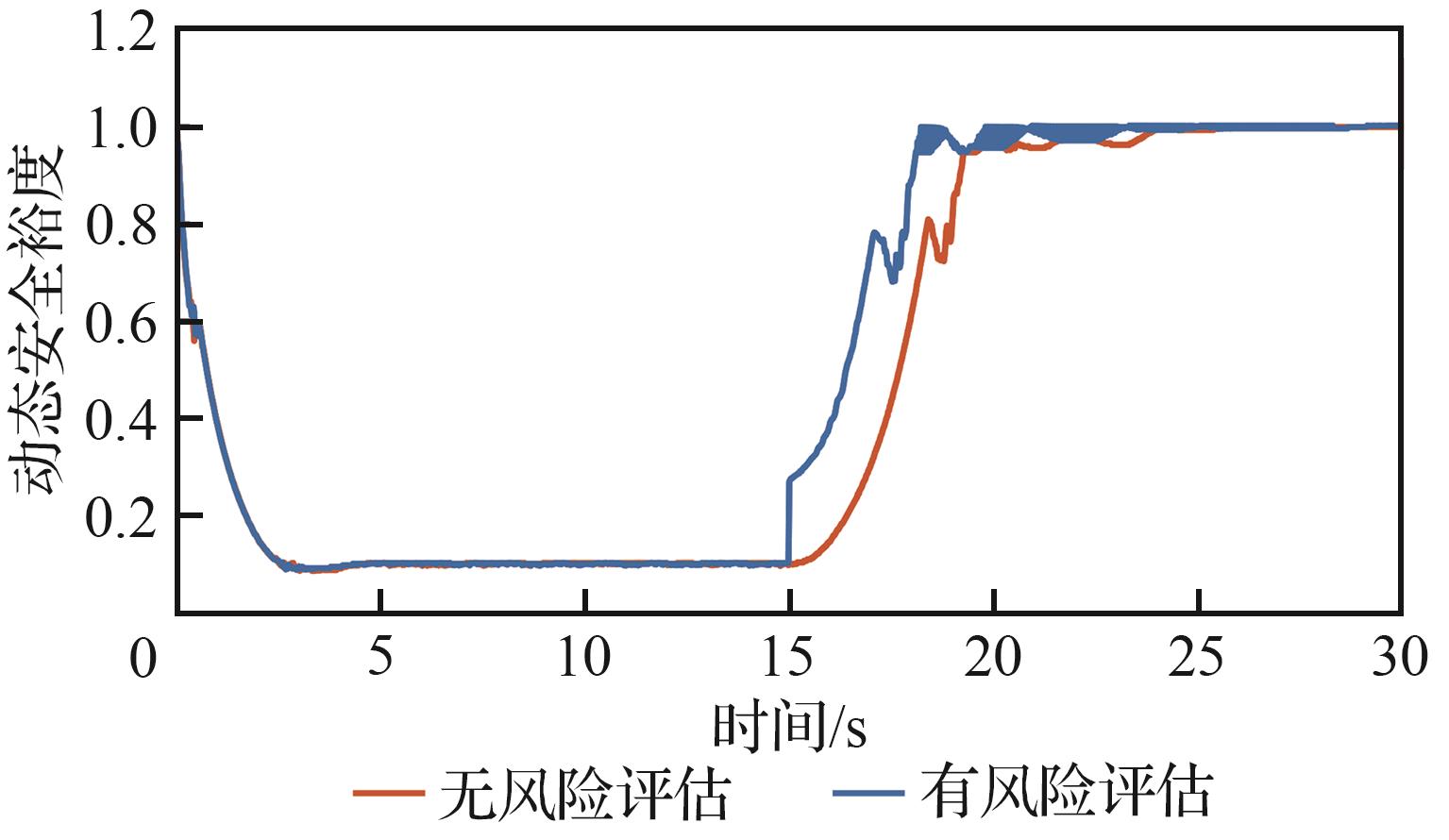
Fig.18
Control input torque of Experimental case 3
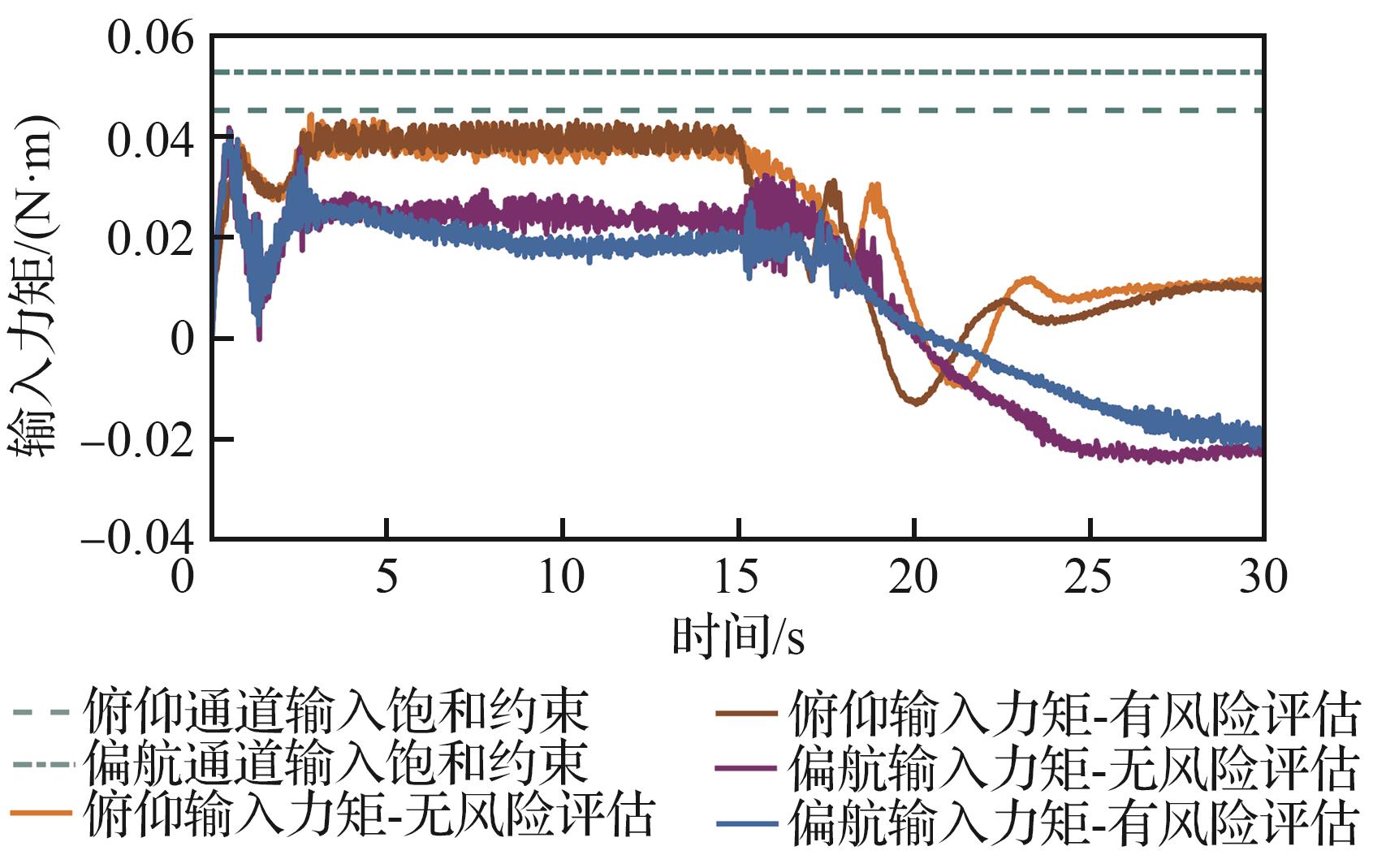
Table 9
Statistical indicators of second maneuver phase of Experimental case 3
| 评估模块 | 无风险评估模块 | 有风险评估模块 |
|---|---|---|
| 调整时间/s | 8.72 | 7.80 |
| 辅助参考收敛时间/s | 3.18 | 2.04 |
| [1] | 陈谋, 黄正国, 申耀华, 等. 先进飞行器复合抗干扰控制技术综述[J]. 航空学报, 2025, 46(6): 531303. |
| CHEN M, HUANG Z G, SHEN Y H, et al. Overview of composite anti-disturbance control technology of advanced vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531303 (in Chinese). | |
| [2] | 马浩翔, 陈谋, 吴庆宪. 具有输入输出约束的无人直升机预设性能安全跟踪控制[J]. 控制理论与应用, 2024, 41(1): 39-48. |
| MA H X, CHEN M, WU Q X. Prescribed performance safe tracking control for the unmanned helicopter with input and output constraints[J]. Control Theory Applications, 2024, 41(1): 39-48 (in Chinese). | |
| [3] | MAYNE D Q, RAWLINGS J B, RAO C V, et al. Constrained model predictive control: Stability and optimality[J]. Automatica, 2000, 36(6): 789-814. |
| [4] | BURLION L, SCHIENI R, KOLMANOVSKY I V. A reference governor for linear systems with polynomial constraints[J]. Automatica, 2022, 142: 110313. |
| [5] | SACCANI D, CECCHIN L, FAGIANO L. Multitrajectory model predictive control for safe UAV navigation in an unknown environment[J]. IEEE Transactions on Control Systems Technology, 2023, 31(5): 1982-1997. |
| [6] | HUO D, DAI L, CHAI R Q, et al. Collision-free model predictive trajectory tracking control for UAVs in obstacle environment[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(3): 2920-2932. |
| [7] | ZOU T, YANG H H, MA G, et al. Adaptive constrained control for two-degree-of-freedom helicopter system with actuator faults[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(5): 6363-6375. |
| [8] | WEHBEH J, RAHMAN S, SHARF I. Distributed model predictive control for UAVs collaborative payload transport[C]∥2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2021: 11666-11672. |
| [9] | HABIBI H, SAFAEI A, VOOS H, et al. Safe navigation of a quadrotor UAV with uncertain dynamics and guaranteed collision avoidance using barrier Lyapunov function[J]. Aerospace Science and Technology, 2023, 132: 108064. |
| [10] | TEE K P, GE S S, TAY E H. Barrier Lyapunov Functions for the control of output-constrained nonlinear systems[J]. Automatica, 2009, 45(4): 918-927. |
| [11] | MORENO-VALENZUELA J, MOYRÓN J, MONTOYA-CHAIREZ J. Limited integrator antiwindup-based control of input-constrained manipulators[J]. IEEE Transactions on Industrial Electronics, 2024, 71(2): 1738-1748. |
| [12] | HAO S L, LIU T, GENG X P, et al. Anti-windup ADRC design for temperature control systems with output delay against asymmetric input constraint[J]. ISA Transactions, 2023, 137: 519-530. |
| [13] | WEN S X, PAN Z R, LIU K Z, et al. Practical anti-windup for open-loop stable systems under magnitude and rate constraints: Application to turbofan engines[J]. IEEE Transactions on Industrial Electronics, 2023, 70(4): 4128-4137. |
| [14] | LIU Y D, PEDARI Y, OSSAREH H R. Constraint management for quadcopter drones: Reference governor-based approaches[C]∥2022 American Control Conference (ACC). Piscataway: IEEE Press, 2022: 4042-4049. |
| [15] | SCHIENI R, MODASIYA A, MALISOFF M, et al. Quadrotor flight envelope protection with trajectory and yaw tracking[J]. Journal of Guidance, Control, and Dynamics, 2024, 47(12): 2601-2614. |
| [16] | MAGNANI G, CASSARO M, BIANNIC J M, et al. Quadrotor fault-tolerant constrained control using interval contractor-based adaptive reference governor[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(2): 1409-1421. |
| [17] | GARONE E, DI CAIRANO S, KOLMANOVSKY I. Reference and command governors for systems with constraints: A survey on theory and applications[J]. Automatica, 2017, 75: 306-328. |
| [18] | NICOTRA M M, GARONE E. The explicit reference governor: A general framework for the closed-form control of constrained nonlinear systems[J]. IEEE Control Systems Magazine, 2018, 38(4): 89-107. |
| [19] | TARTAGLIONE G, NICOTRA M M, NALDI R, et al. A constrained control framework for unmanned aerial vehicles based on Explicit Reference Governor[J]. Automatica, 2024, 166: 111696. |
| [20] | CONVENS B, MERCKAERT K, NICOTRA M M, et al. Safe, fast, and efficient distributed receding horizon constrained control of aerial robot swarms[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4173-4180. |
| [21] | WANG P, ZHANG X B, ZHU J H. Integrated missile guidance and control: A novel explicit reference governor using a disturbance observer[J]. IEEE Transactions on Industrial Electronics, 2019, 66(7): 5487-5496. |
| [22] | HU Q L, CHI B R. Spacecraft rendezvous and docking using the explicit reference governor approach[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(7): 4131-4141. |
| [23] | 党庆庆, 刘贞报, 李文博, 等. 复杂约束下的挠性航天器姿态参考管理控制[J]. 控制理论与应用, 2023, 40(10): 1813-1820. |
| DANG Q Q, LIU Z B, LI W B, et al. Explicit reference governor-based constrained flexible spacecraft attitude control[J]. Control Theory Applications, 2023, 40(10): 1813-1820 (in Chinese). | |
| [24] | WANG P, DU B, PENG X H, et al. Constrained control of UAV swarms using event-triggered distributed explicit reference governor[C]∥2023 6th International Symposium on Autonomous Systems (ISAS). Piscataway: IEEE Press, 2023: 1-6. |
| [25] | DANG Q Q, LIU K, WEI J B. Explicit reference governor based spacecraft attitude reorientation control with constraints and disturbances[J]. Acta Astronautica, 2022, 190: 455-464. |
| [26] | ZHONG Q C, REES D. Control of uncertain LTI systems based on an uncertainty and disturbance estimator[J]. Journal of Dynamic Systems, Measurement, and Control, 2004, 126(4): 905-910. |
| [27] | ZHANG T, ZHU B, ZHANG L, et al. Time-varying uncertainty and disturbance estimator without velocity measurements: Design and application[J]. Control Engineering Practice, 2024, 143: 105780. |
| [28] | SCHLANBUSCH S M, ZHOU J. Adaptive backstepping control of a 2-DOF helicopter system with uniform quantized inputs[C]∥IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society. Piscataway: IEEE Press, 2020: 88-94. |
| [29] | KODITSCHEK D E, RIMON E. Robot navigation functions on manifolds with boundary[J]. Advances in Applied Mathematics, 1990, 11(4): 412-442. |
| [30] | ZHANG T, LI S Y, ZHU B, et al. TV-UDE: Time-varying uncertainty and disturbance estimator[J]. International Journal of Robust and Nonlinear Control, 2023, 33(16): 9579-9601. |
| [31] | GARONE E, NICOTRA M, NTOGRAMATZIDIS L. Explicit reference governor for linear systems[J]. International Journal of Control, 2018, 91(6): 1415-1430. |
| [1] | Hao ZHANG, Jianing LIU, Zhi XU, Yuanxin YANG. Trajectory prediction method of incoming missiles based on improved inverse reinforcement learning in aircraft active defense mode [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(8): 332753-332753. |
| [2] | Honglin LIU, Guan WANG, Shuaibin AN, Shaojie MA, Kai LIU. Online identification based strong adaptive control of hypersonic morphing vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331654-331654. |
| [3] | Ming YAN, Jiaxing WANG, Heqi LI, Kai LIU. Active disturbance rejection control of carrier-based aircraft based on offline network/online identification [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531317-531317. |
| [4] | Shusheng CHEN, Muliang JIA, Jiahao LIN, Shiyi JIN, Zhenghong GAO, Yueqing WANG, Zhiqiang MA, Zheng LI, Chenlong DUAN, Jiawei LI. Empowering aircraft technology applications with generative models: Research progress and prospects [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 631194-631194. |
| [5] | Zibo LIU, Ran ZHANG, Wenchao XUE, Huifeng LI. Active disturbance rejection control for load relief of launch vehicles considering elastic effects [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 330319-330319. |
| [6] | Qingcheng WAN, Meng YU, Yubao LI, Yin WANG. Intelligent guidance algorithm for target hit point branch prediction for head-on interception [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730873-730873. |
| [7] | Qian ZHANG, Guanwei YAN, Qin NIE, Ruihai CHEN, Jianing LIU. Aircraft-missile cooperative guidance method based on trajectory numerical optimization of long-range air-to-air missiles [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(17): 530138-530138. |
| [8] | Zixiao YANG, Shiyao LI, Chen WEI, Zhan LI, Bo ZHU. Robust control of underactuated 3-DOF helicopter based on lower order disturbance estimator [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 629056-629056. |
| [9] | Kunda LIU, Xueming LIU, Bo ZHU, Qingrui ZHANG. Robust safe control for multi⁃UAV formation flight through narrow corridors [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729768-729768. |
| [10] | Xu ZHAO, Guoyuan QI, Xinchen YU, Jianbing HU, Xia LI. Compensation function observer and its application in flight vehicle attitude control [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327224-327224. |
| [11] | Baichuan ZHANG, Wenhao BI, An ZHANG, Zeming MAO, Mi YANG. Transformer-based error compensation method for air combat aircraft trajectory prediction [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327413-327413. |
| [12] | Jiajie CHEN, Jiqiang WANG, Haibo ZHANG, Zhongzhi HU, Xinmin CHEN. Design of steady-state disturbance rejection controller for aeroengine based on geometric design method in finite frequency range [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327434-327434. |
| [13] | Bing WANG, Runyuan ZOU, Zhening CHANG. Aircraft takeoff mass estimation method based on improved simulated annealing algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(16): 328090-328090. |
| [14] | Jiaqi SHAO, Xiaohui ZHANG, Hanyu XI, Zirong LIU. Multi⁃loop energy control method of linear active disturbance rejection for solar⁃powered UAVs [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327812-327812. |
| [15] | LI Xia, QI Guoyuan, GUO Xitong, ZHAO Xu. High-order differential feedback control and its application in quadrotor UAV [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(12): 326047-326047. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341