Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (23): 632022.doi: 10.7527/S1000-6893.2025.32022
• special column • Previous Articles
Liangjin ZHAO1,2, Haonan TONG1,2( ), Ziyang YUAN1,2, Yundu LI1,2,3,4, Xiaodian ZHANG1,2, Peirui CHENG1,2
), Ziyang YUAN1,2, Yundu LI1,2,3,4, Xiaodian ZHANG1,2, Peirui CHENG1,2
Received:2025-03-25
Revised:2025-04-21
Accepted:2025-06-21
Online:2025-07-16
Published:2025-07-15
Contact:
Haonan TONG
E-mail:hntong@ieee.org
Supported by:CLC Number:
Liangjin ZHAO, Haonan TONG, Ziyang YUAN, Yundu LI, Xiaodian ZHANG, Peirui CHENG. Interference management for UAV swarms: Fundamental mechanisms, techniques, and challenges[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 632022.
Table 1
Related reviews on anti-interference techniques
| 文献 | 年份 | 环境干扰 | 通信干扰 | 感知干扰 | 通信环节抗干扰 | 感知环节抗干扰 | 控制环节抗干扰 | 多环节干扰管理 |
|---|---|---|---|---|---|---|---|---|
| [ | 2018 | × | √ | × | √ | × | × | × |
| [ | 2025 | × | √ | × | √ | × | × | × |
| [ | 2024 | × | × | √ | √ | √ | × | √ |
| [ | 2020 | × | × | √ | × | √ | × | × |
| [ | 2022 | √ | × | × | × | × | √ | × |
| [ | 2024 | √ | √ | × | √ | × | √ | √ |
| 本文 | 2025 | √ | √ | √ | √ | √ | √ | √ |

Fig.1
UAV swarm system architecture under interference
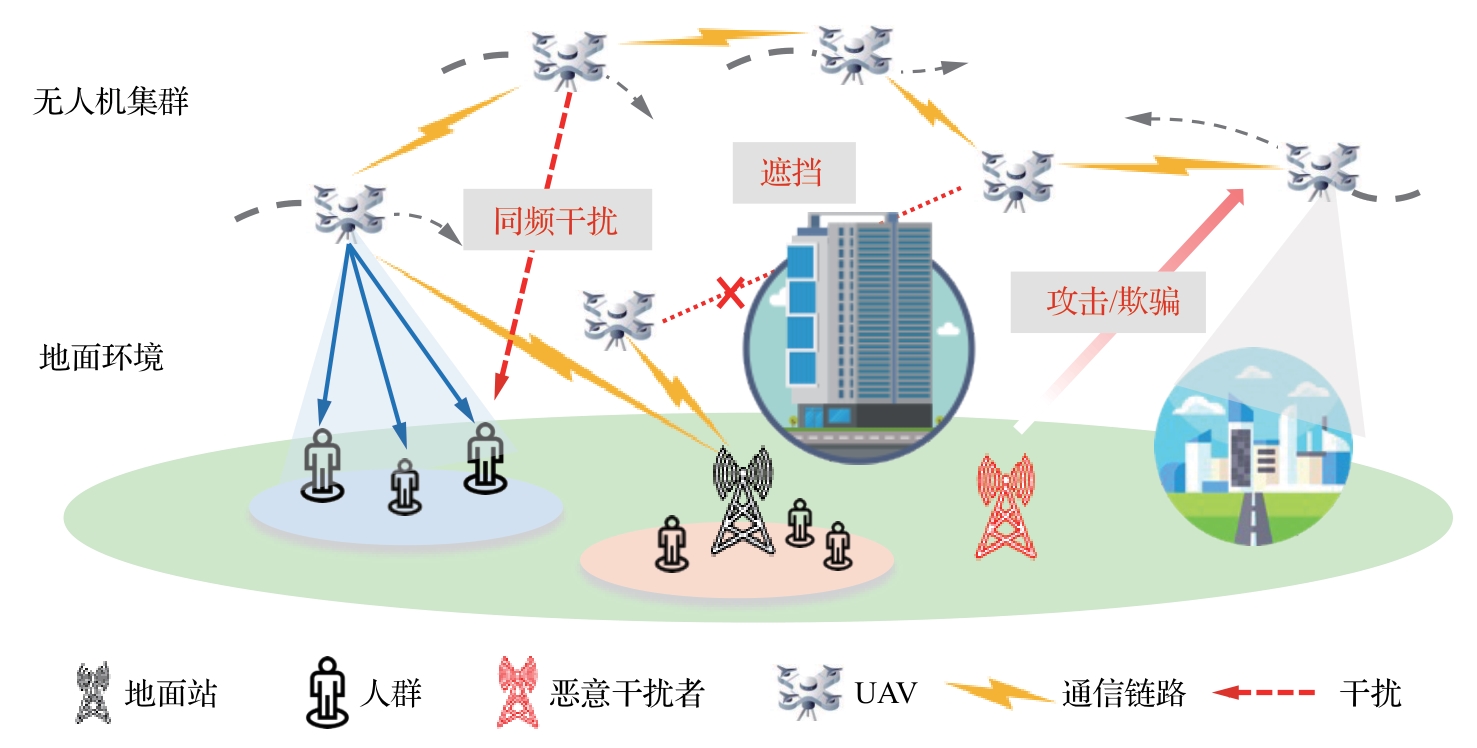
Table 2
UAV swarm interference management mechanism
| 环节 | 措施 | 干扰类型(影响的指标) | 典型输入 | 典型输出 | 效能指标 |
|---|---|---|---|---|---|
| 通信 | 跳频/扩频调制 | 压制干扰(信噪比↓、 误码率↑) | 无线信号频谱特征 | 跳频参数、扩频码 配置 | 误码率↓、链路稳定性↑ |
波束赋形与大规 模多输入多输出 | 多径衰落(误码率↑) | 多天线信道估计 | 波束方向、天线阵列 调参 | 接收信号功率↑、 干扰抑制↑ | |
| 协作频谱感知 | 频谱冲突、资源竞争(连接数↓) | 节点干扰测量、空洞检测 | 信道分配策略 | 频谱冲突率↓、连接数↑ | |
| 加密认证机理 | 欺骗干扰(信号可信度↓) | 控制命令、信号特征 | 安全性验证结果 | 通信安全性↑、风险度↓ | |
| 感知 | 数据预处理与去噪 | 恶劣天气(图像退化↑) | 观测图像、气象参数 | 增强图像、滤波图 | 图像可识别性↑、 识别准确率↑ |
多模态感知 数据融合 | 数据时空错位、分辨率冲突 (融合偏差↑) | 观测图像、雷达、IMU等 | 统一时空对齐结果 | 感知一致性↑、 识别准确率↑ | |
| 传感器冗余设计 | 数据缺失(传感空窗↑) | 同构/异构传感器观测值 | 投票结果或校准 修正值 | 感知覆盖范围↑、 容错率↑ | |
| 干扰建模 | 伪造目标注入(异常特征点↑、 误判率↑) | 历史感知数据、误差信息 | 异常标注或剔除 结果 | 虚警率↓、 识别准确率↑ | |
| 控制 | 动态参数校准 | 传感器漂移、恶劣天气扰动 (姿态估计精度↓、感知精度↓) | 传感器误差、环境估计 | 校准参数、补偿参数 | 姿态控制精度↑、 识别准确率↑ |
轨迹规划与 视角调整 | 遮挡、地形干扰(目标失锁率↑) | 地形模型、干扰源位置 | 重规划轨迹、视角 控制量 | 航迹完成率↑、 目标区域覆盖率↑ |
Table 3
Characteristics, major interference types, and management strategies of different types of UAVs
| UAV类型 | 飞行速度/ ( | 通信频段 | 典型任务 | 主要干扰 | 干扰管理措施 |
|---|---|---|---|---|---|
| 微型/迷你 | 10~30 | 2.4/5.8 GHz | 室内侦察、低空监控 | WiFi干扰、定位失效 | 跳频通信、链路切换 |
| 多旋翼 | 30~80 | 2.4 G/5.8 G, Sub-6 GHz | 巡检测绘、物流安防 | 链路干扰、环境遮挡 | 跳频通信、波束赋形、中继组网 |
| 复合翼 | 60~250 | Sub-6 GHz,毫米波,C/L波段 | 通信中继、快速部署 | 电磁干扰、多源传感冲突 | 跳频通信、飞控优化、融合导航 |
| 固定翼 | 100~500+ | C/L/S波段,Ku频段 | 广域测绘、边境巡逻 | 雷达干扰、压制欺骗 | 波束赋形、自适应调剂、机动规避 |
| 大型长航时 | 200+ | Ku/Ka波段,卫星链路 | 战略监控、宽域感知 | 卫星链路干扰、电磁压制 | 链路冗余、星地协同、自适应通信 |
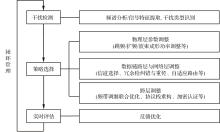
Fig.2
Anti-interference process of UAV communication data link
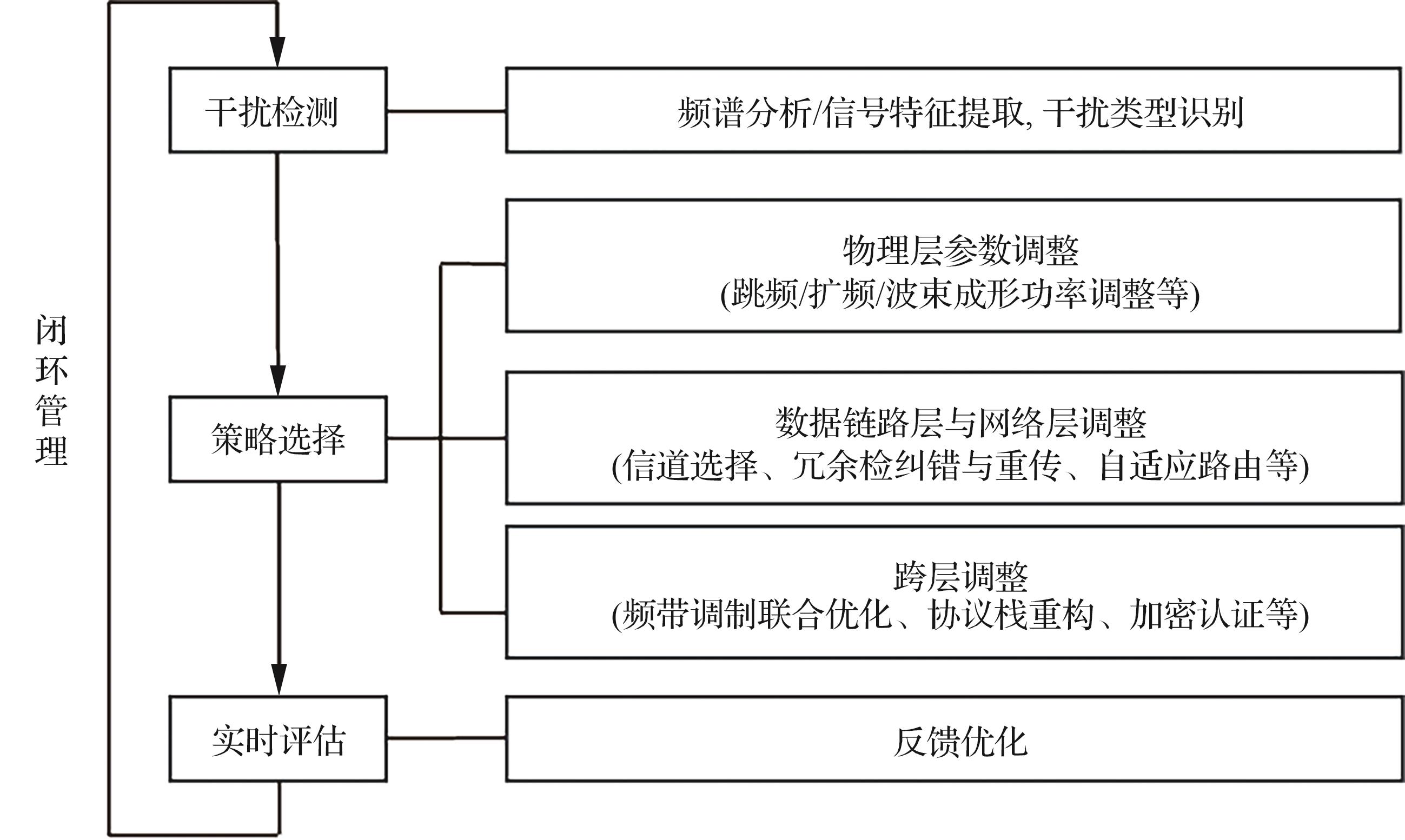
Table 4
Types characteristics of UAV data link interference and corresponding interference management techniques
| 干扰类型 | 特征 | 干扰管理技术 |
|---|---|---|
| 窄带干扰 | 集中某频段,高功率 | 跳频、频谱感知与避让 |
| 宽带干扰 | 全频段覆盖,低功率密度 | 扩频、MIMO分集接收 |
| 脉冲干扰 | 短时突发,高能量 | 前向纠错、交织编码 |
| 多径干扰 | 信号反射导致时延扩展 | OFDM、空时编码 |
| 恶意干扰 | 人为故意干扰(如GPS欺骗) | 加密认证、惯导与视觉等数据融合 |
Fig.3
Anti-interference techniques for UAV perception data and typical applications
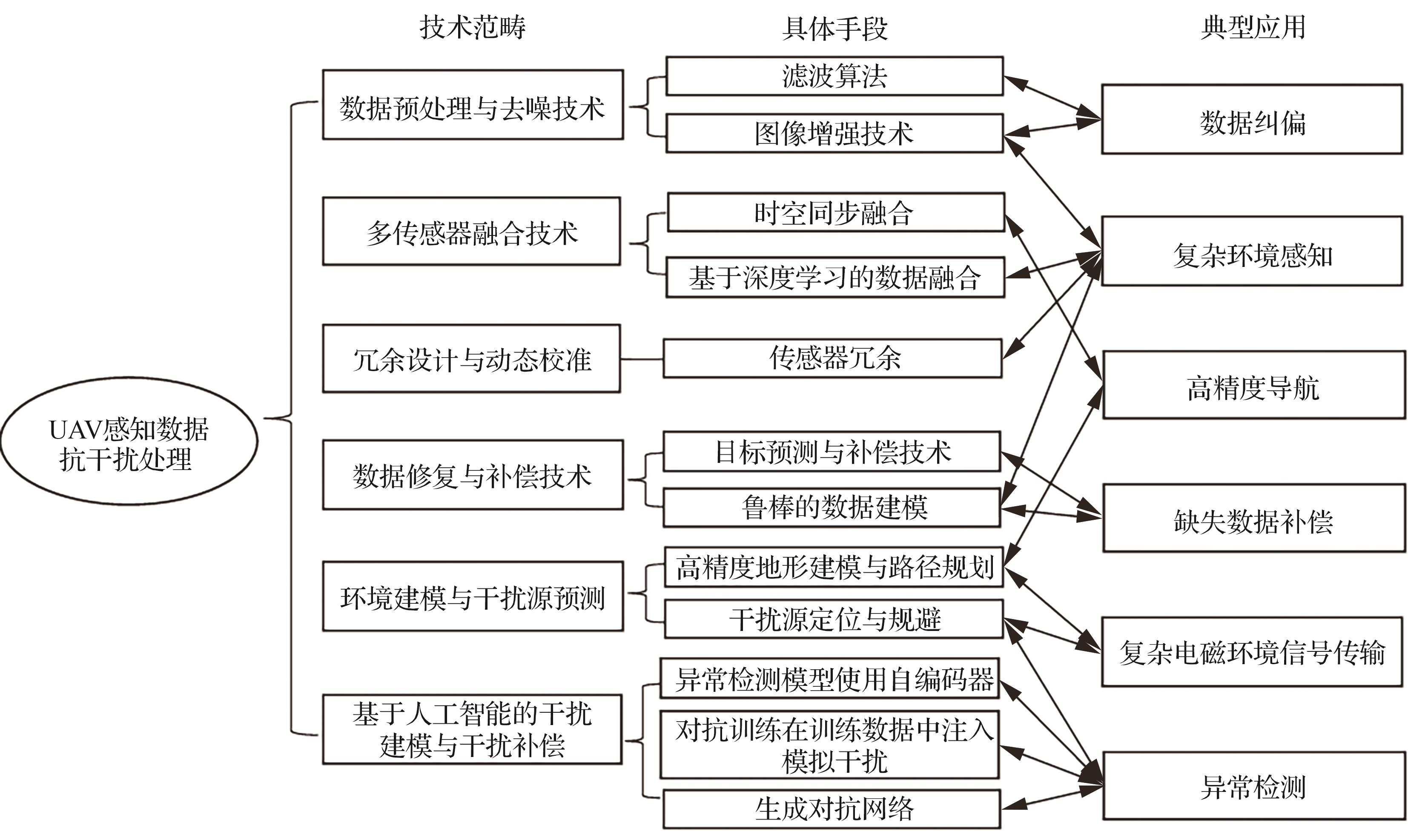
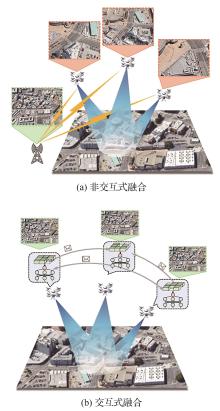
Fig.4
Fusion modes of heterogeneous features in consistency spatial domain
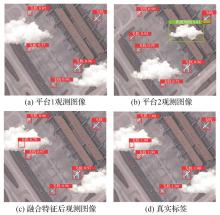
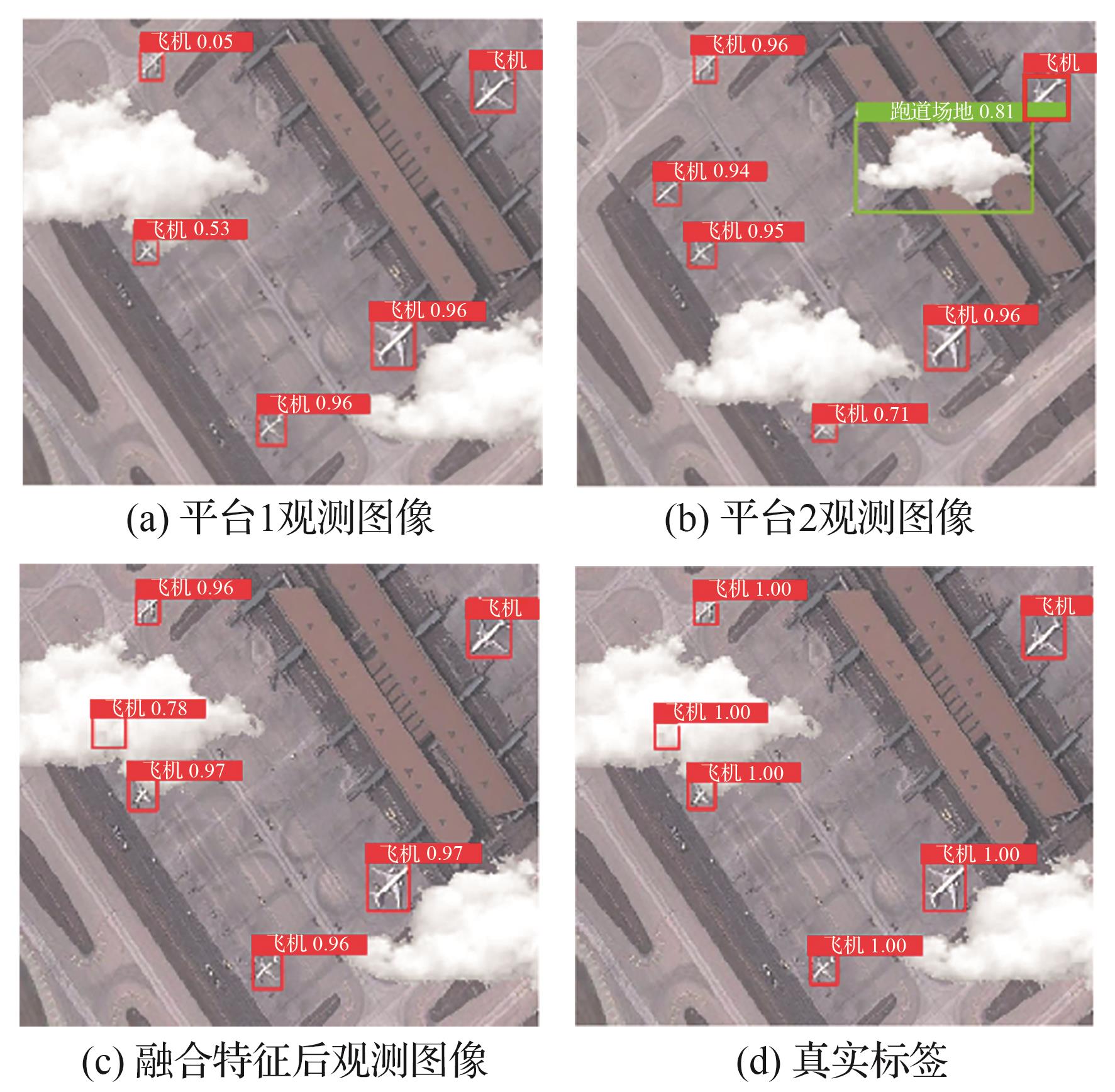
Fig.5
Collaborative perception results of UAVs under cloud occlusion conditions
| [1] | CAO P, LEI L, CAI S S, et al. Computational intelligence algorithms for UAV swarm networking and collaboration: A comprehensive survey and future directions[J]. IEEE Communications Surveys & Tutorials, 2024, 26(4): 2684-2728. |
| [2] | 中共中央, 国务院. 国家综合立体交通网规划纲要[EB/OL].. |
| Central Committee of the Communist Party of China, the State Council. Outline of the national comprehensive three-dimensional transportation network plan [EB/OL]. (in Chinese). | |
| [3] | 国务院. “十四五”数字经济发展规划[EB/OL]. . |
| The State Council. 14th five-year plan for the development of the digital economy [EB/OL]. (in Chinese). | |
| [4] | 国务院, 中央军委. 无人驾驶航空器飞行管理条例[EB/OL]. . |
| The State Council, Central Military Commission. Regulations on the flight management of unmanned aerial vehicles [EB/OL]. (in Chinese). | |
| [5] | 中国民用航空总局. 通用航空装备创新应用实施方案(2024—2030年)[EB/OL]. . |
| Civil Aviation Administration of China. Implementation plan for innovation and application of general (2024—2030)[EB/OL]. (in Chinese). | |
| [6] | 刘屹巍, 朴海音, 肖林, 等. 无人机数据链抗干扰技术综述[J]. 飞机设计, 2017, 37(6): 13-16, 21. |
| LIU Y W, PIAO H Y, XIAO L, et al. An overview of anti-interference techniques for UCAV data link[J]. Aircraft Design, 2017, 37(6): 13-16, 21 (in Chinese). | |
| [7] | SHAKHATREH H, SAWALMEH A, HAYAJNEH K F, et al. A systematic review of interference mitigation techniques in current and future UAV-assisted wireless networks[J]. IEEE Open Journal of the Communications Society, 2024, 5: 2815-2846. |
| [8] | 於志文, 孙卓, 程岳, 等. 智能无人机集群协同感知计算研究综述[J]. 航空学报, 2024, 45(20): 630912. |
| YU Z W, SUN Z, CHENG Y, et al. A review of intelligent UAV swarm collaborative perception and computation[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 630912 (in Chinese). | |
| [9] | 陈唯实, 黄毅峰, 卢贤锋. 多传感器融合的无人机探测技术应用综述[J]. 现代雷达, 2020, 42(6): 15-29. |
| CHEN W S, HUANG Y F, LU X F. Survey on application of multi-sensor fusion in UAV detection technology[J]. Modern Radar, 2020, 42(6): 15-29 (in Chinese). | |
| [10] | 牛轶峰, 刘天晴, 李杰, 等. 密集环境中无人机协同机动飞行运动规划方法综述[J]. 国防科技大学学报, 2022, 44(4): 1-12. |
| NIU Y F, LIU T Q, LI J, et al. Review on motion planning methods for unmanned aerial vehicle cooperative maneuvering flight in cluttered environment[J]. Journal of National University of Defense Technology, 2022, 44(4): 1-12 (in Chinese). | |
| [11] | 吴启晖, 董超, 贾子晔, 等. 低空智联网组网与控制理论方法[J]. 航空学报, 2024, 45(3): 028809. |
| WU Q H, DONG C, JIA Z Y, et al. Networking and control mechanism for low-altitude intelligent networks[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(3): 028809 (in Chinese). | |
| [12] | ZHENG Y X, LI S Y, XING K, et al. Unmanned aerial vehicles for magnetic surveys: A review on platform selection and interference suppression[J]. Drones, 2021, 5(3): 93. |
| [13] | ALREFAEI F, ALZAHRANI A, SONG H B, et al. A survey on the jamming and spoofing attacks on the unmanned aerial vehicle networks[C]∥2022 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS). Piscataway: IEEE Press, 2022: 1-7. |
| [14] | 林博森. 基于多无人机视觉的地面多目标关联与融合定位方法研究[D]. 长沙: 国防科技大学, 2021. |
| LIN B S. Research on multi-ground target matching and cooperative localization method based on multi-UAV vision[D]. Changsha: National University of Defense Technology, 2021 (in Chinese). | |
| [15] | 张彦泽. 面向大型零部件加工的机器人定位方法研究[D]. 大连: 大连理工大学, 2022. |
| ZHANG Y Z. Research on industrial robot localization method for large-scale components machining[D]. Dalian: Dalian University of Technology, 2022 (in Chinese). | |
| [16] | HU D, ZHU X J, GONG M, et al. Linear network coding based fast data synchronization for wireless ad hoc networks with controlled topology[J]. China Communications, 2021, 19(5): 46-53. |
| [17] | YANG F, JING C. Data processing technology of UAV tilt photogrammetry based on multi-source geographic information[C]∥2024 International Conference on Power, Electrical Engineering, Electronics and Control (PEEEC). Piscataway: IEEE Press, 2024: 870-874. |
| [18] | 刘畅, 李甜雨. 无人机天气干扰解决研究进展与展望[C]∥山东省航空航天学会2023学术年会. 2023: 99-103. |
| LIU C, LI T Y. Progress and prospect of UAV weather interference solution[C]∥2023 Academic Annual Conference of Shandong Society of Aeronautics and Astronautics. 2023: 99-103 (in Chinese). | |
| [19] | 张海燕. 复杂电磁环境下无人机通信干扰问题的探索[J]. 科技创新与应用, 2020, 10(25): 75-76. |
| ZHANG H Y. Exploration of communication interference of UAV in complex electromagnetic environment[J]. Technology Innovation and Application, 2020, 10(25): 75-76 (in Chinese). | |
| [20] | 郭晨鸿. 复杂天气环境下小型无人机目标检测与跟踪[D]. 成都: 西华大学, 2020. |
| GUO C H. Small UAV target detection and tracking incomplex weather environment[D]. Chengdu: Xihua University, 2020 (in Chinese). | |
| [21] | MUR-ARTAL R, MONTIEL J M M, TARDÓS J D. ORB-SLAM: A versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163. |
| [22] | 潘岩. 多无人机飞行管理与协同感知关键技术研究[D]. 西安: 西北工业大学, 2020. |
| PAN Y. Research on key technologies of multi-UAV flight management and cooperative sensing[D]. Xi’an: Northwestern Polytechnical University, 2020 (in Chinese). | |
| [23] | GUVENC I, CHONG C C. A survey on TOA based wireless localization and NLOS mitigation techniques[J]. IEEE Communications Surveys & Tutorials, 2009, 11(3): 107-124. |
| [24] | DONG J, REN X Y, HAN S L, et al. UAV vision aided INS/odometer integration for land vehicle autonomous navigation[J]. IEEE Transactions on Vehicular Technology, 2022, 71(5): 4825-4840. |
| [25] | 张永顺, 贾鑫, 朱卫纲. 扩频通信抗干扰技术研究综述[J]. 四川兵工学报, 2015, 36(8): 136-140. |
| ZHANG Y S, JIA X, ZHU W G. Study of anti-jamming technologies for spread spectrum communications[J]. Journal of Sichuan Ordnance, 2015, 36(8): 136-140 (in Chinese). | |
| [26] | 李振东,谭维凤,康成斌,等. 直接序列扩频系统抗干扰能力研究[J]. 电子与信息学报, 2021,43(1):116-123. |
| LI Z D, TAN W F, KANG C B, et al. Research on anti-interference ability of direct sequence spread spectrum system[J], Journal of Electronics & Information Technology, 2021, 43(1): 116-123 (in Chinese). | |
| [27] | YUAN Y, ZHAN C J, TIAN W Q, et al. Anti-jamming imaging method for carrier-free ultra-wideband airborne SAR based on variational modal decomposition[J]. Remote Sensing, 2024, 16(12): 2128. |
| [28] | HUANG Y, WU Q Q, LU R, et al. Massive MIMO for cellular-connected UAV: Challenges and promising solutions[J]. IEEE Communications Magazine, 2021, 59(2): 84-90. |
| [29] | BAL A, CAI H F. Downlink STBC-GSSK and STBC-UAV assisted NOMA for 6G and beyond[C]∥2024 IEEE 30th International Symposium on Local and Metropolitan Area Networks (LANMAN). Piscataway: IEEE Press, 2024: 27-32. |
| [30] | 黄方慧, 蒋雯, 邓鑫洋. 无人机数据链抗干扰技术研究[C]∥第七届中国指挥控制大会. 2019: 382-387. |
| HUANG F H, JIANG W, DENG X Y. Research on antijamming technology of UAV data link[C]∥7th China Conference on Command and Control. 2019: 382-387 (in Chinese). | |
| [31] | 秦伟, 胡春静, 彭木根, 等. 面向高速移动场景的F-OFDM并行干扰消除技术[J]. 北京邮电大学学报, 2021, 44(4): 12-18. |
| QIN W, HU C J, PENG M G, et al. Parallel interference cancellation technology for F-OFDM under high-speed mobility scenario[J]. Journal of Beijing University of Posts and Telecommunications, 2021, 44(4): 12-18 (in Chinese). | |
| [32] | 程龙, 孟繁栋, 毛建华, 等. 融合多头自注意力的AeroMACS自适应调制编码算法[J]. 电光与控制, 2024, 31(6): 36-41. |
| CHENG L, MENG F D, MAO J H, et al. AeroMACS adaptive modulation coding algorithm combining multi-headed self-attention[J]. Electronics Optics & Control, 2024, 31(6): 36-41 (in Chinese). | |
| [33] | 刘博. 无人机数据链抗干扰技术研究[D]. 沈阳: 沈阳理工大学, 2022. |
| LIU B. Research on anti-jamming technology of UAV data link[D]. Shenyang: Shenyang Ligong University, 2022 (in Chinese). | |
| [34] | FENG H Z, WANG J J, FANG Z R, et al. Evaluating AoI-centric HARQ protocols for UAV networks[J]. IEEE Transactions on Communications, 2023, 72(1): 288-301. |
| [35] | SUN H J, NALLANATHAN A, WANG C X, et al. Wideband spectrum sensing for cognitive radio networks: A survey[J]. IEEE Wireless Communications, 2013, 20(2): 74-81. |
| [36] | 陈安民. 基于认知无线电的无人机频谱预测与动态接入技术研究[D]. 太原: 中北大学, 2021. |
| CHEN A M. Research on UAV spectrum prediction and dynamic access technology based on cognitive radio[D]. Taiyuan: North University of China, 2021 (in Chinese). | |
| [37] | 张奎鹏. 认知无线电中的协作频谱感知关键技术研究[D]. 成都: 电子科技大学, 2012. |
| ZHANG K P. Income Selling Store management system based on the CMMI specification and SSH framework[D]. Chengdu: University of Electronic Science and Technology of China, 2012 (in Chinese). | |
| [38] | 张宏伟, 达新宇, 胡航, 等. 基于协作频谱感知的多无人机通信网络谱效优化研究[J]. 北京理工大学学报, 2021, 41(8): 830-839. |
| ZHANG H W, DA X Y, HU H, et al. Spectrum efficiency optimization of multi-UAV communication network based on cooperative spectrum sensing[J]. Transactions of Beijing Institute of Technology, 2021, 41(8): 830-839 (in Chinese). | |
| [39] | KAKAR J, MAROJEVIC V. Waveform and spectrum management for unmanned aerial systems beyond 2025[C]∥2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC). Piscataway: IEEE Press, 2017: 1-5. |
| [40] | 李思佳, 毛玉泉, 郑秋容, 等. UAV数据链抗干扰的关键技术研究综述[J]. 计算机应用研究, 2011, 28(6): 2020-2024. |
| LI S J, MAO Y Q, ZHENG Q R, et al. Overview of research on key techniques for anti-jamming of UAV data link[J]. Application Research of Computers, 2011, 28(6): 2020-2024 (in Chinese). | |
| [41] | DONG P Y, XIANG X, LIANG Y, et al. A block-based concatenated LDPC-RS code for UAV-to-ground SC-FDE communication systems[J]. Electronics, 2023, 12(14): 3143. |
| [42] | 张文秋, 丁文锐, 刘春辉. 一种无人机数据链信道选择和功率控制方法[J]. 北京航空航天大学学报, 2017, 43(3): 583-591. |
| ZHANG W Q, DING W R, LIU C H. A channel selection and power control method of UAV data link[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(3): 583-591 (in Chinese). | |
| [43] | DENG C L, FANG X M, WANG X B. Beamforming design and trajectory optimization for UAV-empowered adaptable integrated sensing and communication[J]. IEEE Transactions on Wireless Communications, 2023, 22(11): 8512-8526. |
| [44] | MICHAILIDIS E T, MALIATSOS K, VOUYIOUKAS D. Software-defined radio deployments in UAV-driven applications: A comprehensive review[J]. IEEE Open Journal of Vehicular Technology, 2024, 5: 1545-1586. |
| [45] | 陈世康, 周冰, 曹宝, 等. 无人机安全通信协议研究综述[J]. 通信技术, 2024, 57(3): 213-221. |
| CHEN S K, ZHOU B, CAO B, et al. Literature review of secure communication protocols for UAV[J]. Communications Technology, 2024, 57(3): 213-221 (in Chinese). | |
| [46] | 朱辉, 张业平, 于攀, 等. 面向无人机网络的密钥管理和认证协议[J]. 工程科学与技术, 2019, 51(3): 158-166. |
| ZHU H, ZHANG Y P, YU P, et al. Key management and authentication protocol for UAV network[J]. Advanced Engineering Sciences, 2019, 51(3): 158-166 (in Chinese). | |
| [47] | FENG C S, LIU B, GUO Z, et al. Blockchain-based cross-domain authentication for intelligent 5G-enabled Internet of drones[J]. IEEE Internet of Things Journal, 2021, 9(8): 6224-6238. |
| [48] | ZHOU Y, MA Z, LIU H, et al. A UAV-aided physical layer authentication based on channel characteristics and geographical locations[J]. IEEE Transactions on Vehicular Technology, 2024, 73(1): 1053-1064. |
| [49] | LI Y C, PAWLAK J, PRICE J, et al. Jamming detection and classification in OFDM-based UAVs via feature-and spectrogram-tailored machine learning[J]. IEEE Access, 2022, 10: 16859-16870. |
| [50] | ŠIMON O, GÖTTHANS T. A survey on the use of deep learning techniques for UAV jamming and deception[J]. Electronics, 2022, 11(19): 3025. |
| [51] | BOUZABIA H, MEFTAH A, KADDOUM G. Federated learning-enabled smart jammer detection in terrestrial and non-terrestrial heterogeneous joint sensing and communication networks[J]. IEEE Communications Letters, 2024, 28(9): 2026-2030. |
| [52] | WANG J J, JIANG C X, HAN Z, et al. Taking drones to the next level: Cooperative distributed unmanned-aerial-vehicular networks for small and mini drones[J]. IEEE Vehicular Technology Magazine, 2017, 12(3): 73-82. |
| [53] | 张惠婷, 张然, 刘敏提, 等. 基于深度强化学习的无人机通信抗干扰算法[J]. 兵器装备工程学报, 2022, 43(10): 27-34. |
| ZHANG H T, ZHANG R, LIU M T, et al. Anti-jamming algorithm of UAV communication based on deep reinforcement learning[J]. Journal of Ordnance Equipment Engineering, 2022, 43(10): 27-34 (in Chinese). | |
| [54] | WANG X Y, CENK GURSOY M, ERPEK T, et al. Jamming-resilient path planning for multiple UAVs via deep reinforcement learning[C]∥2021 IEEE International Conference on Communications Workshops (ICC Workshops). Piscataway: IEEE Press, 2021. |
| [55] | GALLO E, BARRIENTOS A. Reduction of GNSS-Denied inertial navigation errors for fixed wing autonomous unmanned air vehicles[J]. Aerospace Science and Technology, 2022, 120: 107237. |
| [56] | 曹正阳, 张冰, 白屹轩, 等. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(): 157-166. |
| CAO Z Y, ZHANG B, BAI Y X, et al. Multi-UAV cooperative navigation method based on fusion of gnss/ins/vns positioning information[J]. Acta Armamentarii, 2023, 44(S2): 157-166 (in Chinese). | |
| [57] | 王莉, 魏青, 徐连明, 等. 面向通信-导航-感知一体化的应急无人机网络低能耗部署研究[J]. 通信学报, 2022, 43(7): 1-20. |
| WANG L, WEI Q, XU L M, et al. Research on low-energy-consumption deployment of emergency UAV network for integrated communication-navigating-sensing[J]. Journal on Communications, 2022, 43(7): 1-20 (in Chinese). | |
| [58] | MA Y J, WANG L F, LENG S P, et al. An integrated communication and navigation waveform design based on OFDM with index modulation[C]∥2024 International Conference on Ubiquitous Communication (Ucom). Piscataway: IEEE Press, 2024: 248-253. |
| [59] | 于洪波, 王国宏, 孙芸, 等. 一种融合UKF和EKF的粒子滤波状态估计算法[J]. 系统工程与电子技术, 2013, 35(7): 1375-1379. |
| YU H B, WANG G H, SUN Y, et al. Particle filtering algorithm of state estimation on fusion of UKF and EKF[J]. Systems Engineering and Electronics, 2013, 35(7): 1375-1379 (in Chinese). | |
| [60] | 陈伟强, 陈军, 张闯, 等. 基于智能粒子滤波的多传感器信息融合算法[J]. 计算机应用, 2016, 36(12): 3358-3362. |
| CHEN W Q, CHEN J, ZHANG C, et al. Multisensor information fusion algorithm based on intelligent particle filtering[J]. Journal of Computer Applications, 2016, 36(12): 3358-3362 (in Chinese). | |
| [61] | 位瑞英, 卓坚毅. 基于小波分析的信号去噪研究[J]. 应用数学进展, 2021, 10(4): 1329-1335. |
| WEI R Y, ZHUO J Y. Research on signal denoising based on wavelet analysis[J]. Advances in Applied Mathematics, 2021, 10(4): 1329-1335 (in Chinese). | |
| [62] | 丁畅, 董丽丽, 许文海. “直方图” 均衡化图像增强技术研究综述[J]. 计算机工程与应用, 2017, 53(23): 12-17. |
| DING C, DONG L L, XU W H. Review of “histogram” equalization technique for image enhancement[J]. Computer Engineering and Applications, 2017, 53(23): 12-17 (in Chinese). | |
| [63] | 李加元, 胡庆武, 艾明耀, 等. 结合天空识别和暗通道原理的图像去雾[J]. 中国图象图形学报, 2015, 20(4): 514-519. |
| LI J Y, HU Q W, AI M Y, et al. Image haze removal based on sky region detection and dark channel prior[J]. Journal of Image and Graphics, 2015, 20(4): 514-519 (in Chinese). | |
| [64] | 王满利, 王晓龙, 张长森. 基于动态范围压缩增强和NSST的红外与可见光图像融合算法[J]. 光子学报, 2022, 51(9): 277-291. |
| WANG M L, WANG X L, ZHANG C S. Infrared and visible image fusion algorithm based on dynamic range compression enhancement and NSST[J]. Acta Photonica Sinica, 2022, 51(9): 277-291 (in Chinese). | |
| [65] | 邹波, 张华, 姜军. 多传感信息融合的改进扩展卡尔曼滤波定姿[J]. 计算机应用研究, 2014, 31(4): 1035-1038, 1042. |
| ZOU B, ZHANG H, JIANG J. Multi-sensor information fusion’s improved extended Kalman filter attitude determination[J]. Application Research of Computers, 2014, 31(4): 1035-1038, 1042 (in Chinese). | |
| [66] | 王秉路, 靳杨, 张磊, 等. 基于多传感器融合的协同感知方法[J]. 雷达学报, 2024, 13(1): 87-96. |
| WANG B L, JIN Y, ZHANG L, et al. Collaborative perception method based on multisensor fusion[J]. Journal of Radars, 2024, 13(1): 87-96 (in Chinese). | |
| [67] | SONG Z Y, JIA F Y, PAN H Y, et al. ContrastAlign: Toward robust BEV feature alignment via contrastive learning for multi-modal 3D object detection[DB/OL]. arXiv preprint: 2405.16873, 2025. |
| [68] | WANG Z J, WU Y, NIU Q Q. Multi-sensor fusion in automated driving: A survey[J]. IEEE Access, 2019, 8: 2847-2868. |
| [69] | Shumway R H, Stoffer D S. Time series analysis and its applications with R examples[M]. Cham: Springer Cham, 2017: 75-163. |
| [70] | YU Y, SI X S, HU C H, et al. A review of recurrent neural networks: LSTM cells and network architectures[J]. Neural Computation, 2019, 31(7): 1235-1270. |
| [71] | SIAMI-NAMINI S, TAVAKOLI N, SIAMI NAMIN A. A comparison of ARIMA and LSTM in forecasting time series[C]∥2018 17th IEEE International Conference on Machine Learning and Applications (ICMLA). Piscataway: IEEE Press, 2018: 1394-1401. |
| [72] | 魏泽华, 戴慧玲, 汪庭霁. 基于无人机的空中测向定位干扰源研究[J]. 数字通信世界, 2018(5): 35-36. |
| WEI Z H, DAI H L, WANG T J. Analysis of aerial direction finding and locating for interference source based on unmanned aerial vehicle[J]. Digital Communication World, 2018(5): 35-36 (in Chinese). | |
| [73] | 张国梁, 郭晓军. 基于自编码器的网络异常检测研究综述[J]. 信息安全学报, 2023, 8(2): 81-94. |
| ZHANG G L, GUO X J. An overview of network anomaly detection based on autoencoders[J]. Journal of Cyber Security, 2023, 8(2): 81-94 (in Chinese). | |
| [74] | 杨晓晖, 张圣昌. 基于多粒度级联孤立森林算法的异常检测模型[J]. 通信学报, 2019, 40(8): 133-142. |
| YANG X H, ZHANG S C. Anomaly detection model based on multi-grained cascade isolation forest algorithm[J]. Journal on Communications, 2019, 40(8): 133-142 (in Chinese). | |
| [75] | GOODFELLOW I, POUGET-ABADIE J, MIRZA M, et al. Generative adversarial networks[J]. Communications of the ACM, 2020, 63(11): 139-144. |
| [76] | LIU Z H, SHANG Y Y, LI T M, et al. Robust multi-drone multi-target tracking to resolve target occlusion: A benchmark[J]. IEEE Transactions on Multimedia, 2023, 25: 1462-1476. |
| [77] | WANG Y C, WANG Z R, CHENG P R, et al. AVCPNet: An AAV-vehicle collaborative perception network for 3-D object detection[J]. IEEE Transactions on Geoscience and Remote Sensing, 2025, 63: 5615916. |
| [78] | TIAN P J, WANG Z R, CHENG P R, et al. UCDNet: Multi-UAV collaborative 3-D object detection network by reliable feature mapping[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 63: 5602016. |
| [79] | HU Y, Fang S H, LEI Z X, et al. Where2comm: Communication-efficient collaborative perception via spatial confidence maps[C]∥Advances in Neural Information Processing Systems. 2022. |
| [80] | DUAN S J, CHENG P R, WANG Z C, et al. MDCNet: A multiplatform distributed collaborative network for object detection in remote sensing imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5605515. |
| [81] | WANG Z C, WANG Z R, CHENG P R, et al. RingMo-galaxy: A remote sensing distributed foundation model for diverse downstream tasks[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 63: 5606718. |
| [82] | CHEN M X, WANG Z R, WANG Z C, et al. C2F-net: Coarse-to-fine multidrone collaborative perception network for object trajectory prediction[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2025, 18: 6314-6328. |
| [83] | WEN W L, JIA Y J, XIA W C. Joint scheduling and resource allocation for federated learning in SWIPT-enabled micro UAV swarm networks[J]. China Communications, 2022, 19(1): 119-135. |
| [84] | LIU H W, YOO S J, KWAK K S. Opportunistic relaying for low-altitude UAV swarm secure communications with multiple eavesdroppers[J]. Journal of Communications and Networks, 2018, 20(5): 496-508. |
| [85] | 赵欣怡. 多无人机类脑智能决策与协同控制方法研究[D]. 天津: 天津大学, 2020. |
| ZHAO X Y. Research on brain-inspired intelligence decision and coordination control for multiple unmanned aerial vehicles[D]. Tianjin: Tianjin University, 2020 (in Chinese). | |
| [86] | 吴志娟, 林艳, 张一晋, 等. 基于多智能体协同的无人机簇群多域节能抗干扰通信[J]. 中国科学: 信息科学, 2023, 53(12): 2511-2526. |
| WU Z J, LIN Y, ZHANG Y J, et al. Multi-agent collaboration based UAV clusters multi-domain energy-saving anti-jamming communication[J]. Scientia Sinica (Informationis), 2023, 53(12): 2511-2526 (in Chinese). | |
| [87] | 宋佰霖, 许华, 蒋磊, 等. 一种基于深度强化学习的通信抗干扰智能决策方法[J]. 西北工业大学学报, 2021, 39(3): 641-649. |
| SONG B L, XU H, JIANG L, et al. An intelligent decision-making method for anti-jamming communication based on deep reinforcement learning[J]. Journal of Northwestern Polytechnical University, 2021, 39(3): 641-649 (in Chinese). | |
| [88] | 李明, 任清华, 吴佳隆. 无人机多域联合抗干扰智能决策算法研究[J]. 西北工业大学学报, 2021, 39(2): 367-374. |
| LI M, REN Q H, WU J L. Exploring UAV’s multi-domain joint anti-jamming intelligent decision algorithm[J]. Journal of Northwestern Polytechnical University, 2021, 39(2): 367-374 (in Chinese). | |
| [89] | WANG Y Z, LIU Q P, MIHANKHAH E, et al. Detection and isolation of sensor attacks for autonomous vehicles: Framework, algorithms, and validation[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 8247-8259. |
| [90] | MAO W H, LU Y, PAN G F, et al. UAV-assisted communications in SAGIN-ISAC: Mobile user tracking and robust beamforming[J]. IEEE Journal on Selected Areas in Communications, 2025, 43(1): 186-200. |
| [91] | GUO Z J, TONG H N, ZHANG Z L, et al. Perception-enhanced multitask multimodal semantic communication for UAV-assisted integrated sensing and communication system[C]∥IEEE International Conference on Communications Workshops. Piscataway: IEEE Press, 2025. |
| [92] | GU J C, DING G R, WANG H C, et al. Integrated communications and jamming: Toward dual-functional wireless networks under antagonistic environment[J]. IEEE Communications Magazine, 2023, 61(5): 181-187. |
| [93] | GU J C, DING G R, WANG H C, et al. Sensing assisted integrated communication and jamming systems with RSMA for dynamic suspicious communications[J]. IEEE Transactions on Vehicular Technology, 2024, 73(4): 5965-5970. |
| [94] | 张宇宸, 段海滨, 魏晨. 基于深度强化学习的无人机集群数字孪生编队避障[J]. 工程科学学报, 2024, 46(7): 1187-1196. |
| ZHANG Y C, DUAN H B, WEI C. Digital twin-based obstacle avoidance method for unmanned aerial vehicle formation control using deep reinforcement learning[J]. Chinese Journal of Engineering, 2024, 46(7): 1187-1196 (in Chinese). | |
| [95] | TURSUNBOEV J, KANG Y S, HUH S B, et al. Hierarchical federated learning for edge-aided unmanned aerial vehicle networks[J]. Applied Sciences, 2022, 12(2): 670. |
| [96] | 潘筱茜, 张姣, 刘琰, 等. 基于深度强化学习的多域联合干扰规避[J]. 信号处理, 2022, 38(12): 2572-2581. |
| PAN X Q, ZHANG J, LIU Y, et al. Multi-domain joint interference avoidance based on deep reinforcement learning[J]. Journal of Signal Processing, 2022, 38(12): 2572-2581 (in Chinese). | |
| [97] | 张红蕾, 盛志超, 叶林, 等. 基于多传感器融合的无人机自主避障方法[J]. 激光杂志, 2024, 45(1): 229-235. |
| ZHANG H L, SHENG Z C, YE L, et al. Autonomous obstacle avoidance method for UAV based on multi-sensor fusion[J]. Laser Journal, 2024, 45(1): 229-235 (in Chinese). | |
| [98] | WU Y X, YANG L, ZHANG L, et al. Intrusion detection for unmanned aerial vehicles security: A tiny machine learning model[J]. IEEE Internet of Things Journal, 2024, 11(12): 20970-20982. |
| [99] | ZHANG Y G, WANG W, SHI F Y. Reputation-based Raft-Poa layered consensus protocol converging UAV network[J]. Computer Networks, 2024, 240: 110170. |
| [100] | DU R Z, CAO B W, GAO Y. Collaborative framework for UAVs-assisted mobile edge computing: A proximity policy optimization approach[J]. The Journal of Supercomputing, 2024, 80(8): 10485-10510. |
| [101] | 孟跃宇, 李勇峰, 王甲富, 等. 电磁超表面在隐身技术中的应用研究进展[J]. 信息对抗技术, 2024(3): 1-23. |
| MENG Y Y, LI Y F, WANG J F, et al. Research progress of electromagnetic metasurface applications in stealth technology[J]. Information Countermeasure Technology, 2024(3): 1-23 (in Chinese). | |
| [102] | ZHANG H J, HUANG M L, ZHOU H, et al. Capacity maximization in RIS-UAV networks: A DDQN-based trajectory and phase shift optimization approach[J]. IEEE Transactions on Wireless Communications, 2023, 22(4): 2583-2591. |
| [103] | 蒋军彪, 王晓章, 张卓. 量子密钥在蜂群作战中的应用初探[J]. 弹箭与制导学报, 2021, 41(2): 1-5. |
| JIANG J B, WANG X Z, ZHANG Z. Preliminary study on the application of quantum key in swarm fighting system[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2021, 41(2): 1-5 (in Chinese). |
| [1] | Kun LI, Shuhui BU, Jiapeng LI, Juboxi WANG, Pengcheng HAN, Xiaohan LI, Haowei LI. UAV swarm positioning method based on monocular vision and ranging information [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531281-531281. |
| [2] | Chuanyun WANG, Yang SU, Linlin WANG, Tian WANG, Jingjing WANG, Qian GAO. Multi-object continuous robust tracking algorithm for anti-UAV swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 329017-329017. |
| [3] | Yunpeng CAI, Dapeng ZHOU, Jiangchuan DING. Intelligent collaborative control of UAV swarms with collision avoidance safety constraints [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529683-529683. |
| [4] | Zhiwen YU, Zhuo SUN, Yue CHENG, Bin GUO. A review of intelligent UAV swarm collaborative perception and computation [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 630912-630912. |
| [5] | Ming HE, Haotian CHEN, Wei HAN, Cheng DENG, Haibin DUAN. Development status and key technologies of cooperative control of bird-inspired UAV swarms [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 29946-029946. |
| [6] | Wei LIU, Lin ZHANG, Daiqiang WANG, Xianliang MENG, Bo ZHANG. Application and key technologies of laser weapons in anti-UAV swarm operations [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(12): 329457-329457. |
| [7] | Chao WEN, Wenhan DONG, XIE Wujie, Ming CAI, Ri LIU. Distributed cooperative area search method for UAV swarms based on revisit mechanism [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(11): 327561-327561. |
| [8] | WANG Xiaoyue, WANG Xun, WANG Yongzhen, FEI Teng, LIU Dawei. Evaluation method for combat effectiveness of task-based simulated UAV swarm system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S1): 726937-726937. |
| [9] | SU Lingfei, HUA Yongzhao, DONG Xiwang, REN Zhang. Human-UAV swarm multi-modal intelligent interaction methods [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S1): 727001-727001. |
| [10] | XU Guangtong, WANG Zhu, CAO Yan, SUN Jingliang, LONG Teng. Dynamic-priority-decoupled UAV swarm trajectory planning using distributed sequential convex programming [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(2): 325059-325059. |
| [11] | NI Yuan, YANG Hao, JIANG Bin. Fault tolerant game control of swarm confrontation with decision faults [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(4): 524978-524978. |
| [12] | TANG Shuaiwen, ZHOU Zhijie, JIANG Jiang, CAO You, CHEN Yuan, YE Yanqing. Consensus evaluation of UAV swarm cooperative situation awareness considering perturbation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724233-724233. |
| [13] | XU Lei, ZHOU Lisha, LI Renjun, GU Cunfeng. Application of millimeter wave beam coding technology in UAV intelligent swarm [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723754-723754. |
| [14] | WANG Xiangke, LIU Zhihong, CONG Yirui, LI Jie, CHEN Hao. Miniature fixed-wing UAV swarms: Review and outlook [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(4): 23732-023732. |
| [15] | ZHANG Yaozhong, XU Jialin, YAO Kangjia, LIU Jieling. Pursuit missions for UAV swarms based on DDPG algorithm [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(10): 324000-324000. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341