ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (11): 327561-327561.doi: 10.7527/S1000-6893.2022.27561
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Chao WEN1, Wenhan DONG2, XIE Wujie2, Ming CAI2( ), Ri LIU3
), Ri LIU3
Received:2022-06-01
Revised:2022-06-30
Accepted:2022-09-29
Online:2023-06-15
Published:2022-10-14
Contact:
Ming CAI
E-mail:caiming1124@sina.com
Supported by:CLC Number:
Chao WEN, Wenhan DONG, XIE Wujie, Ming CAI, Ri LIU. Distributed cooperative area search method for UAV swarms based on revisit mechanism[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(11): 327561-327561.

Fig.1
Paper organization structure
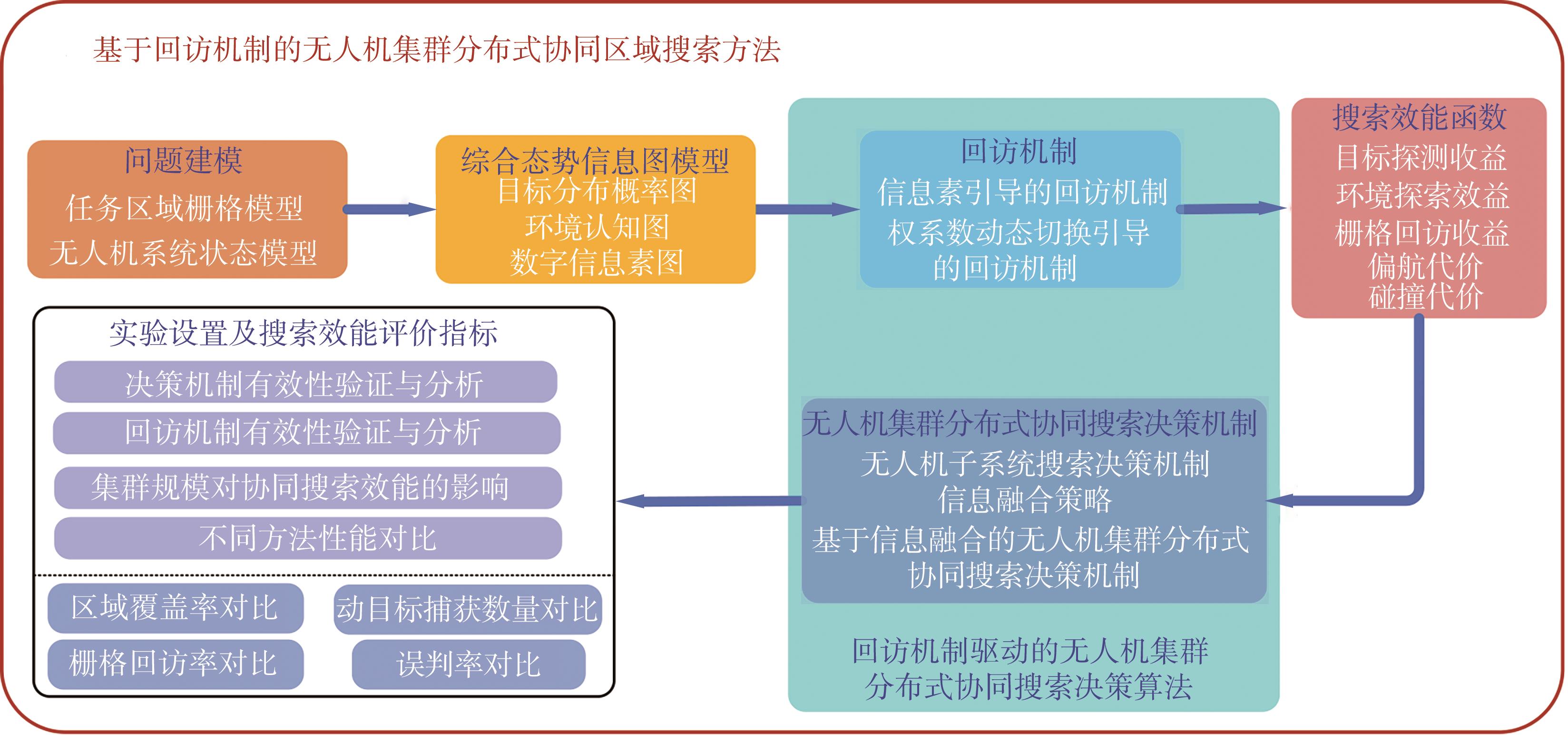
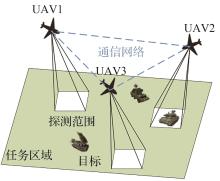
Fig.2
UAV swarm cooperative area search mission
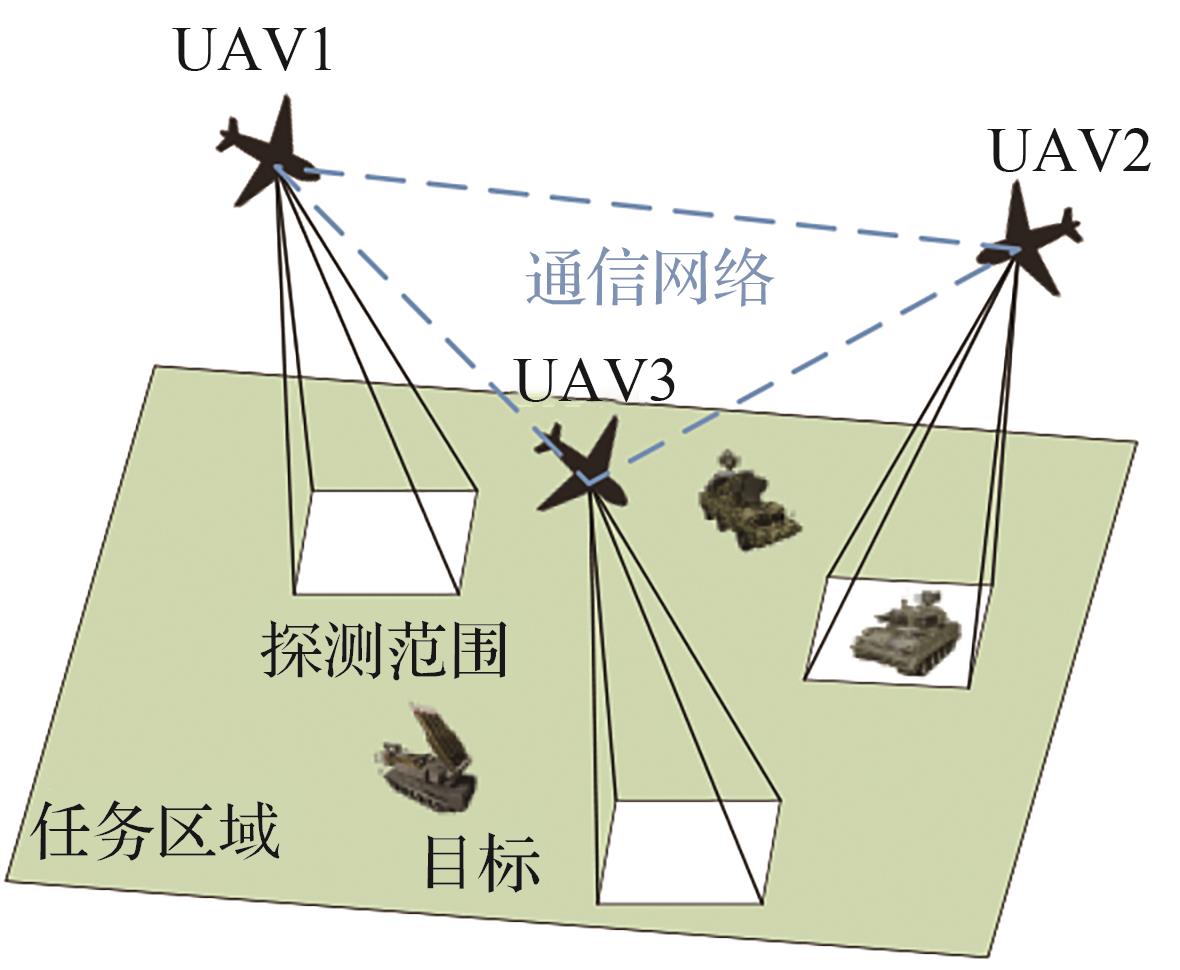
Fig.3
Grid mission area
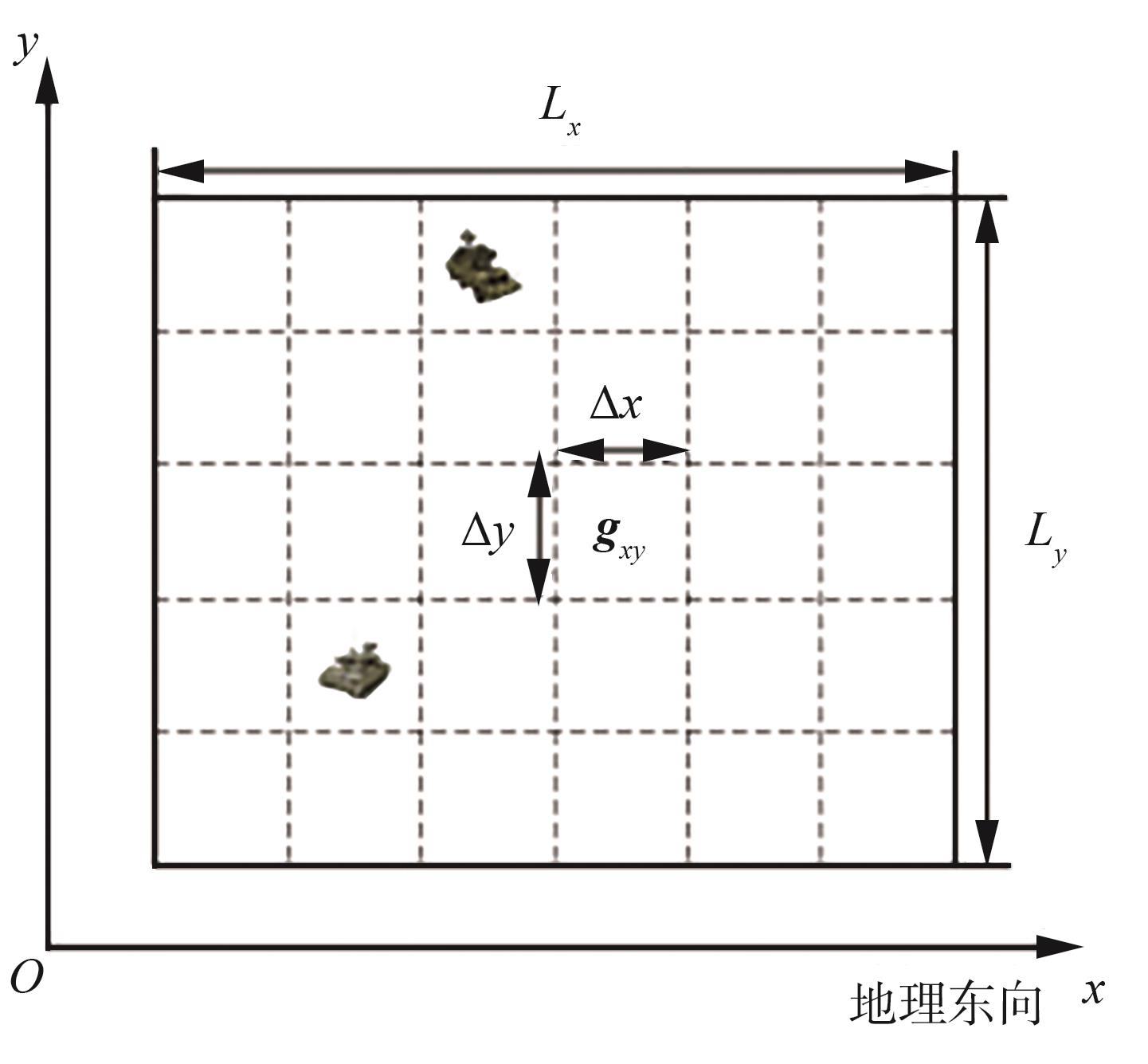

Fig.4
Discrete action space of UAV
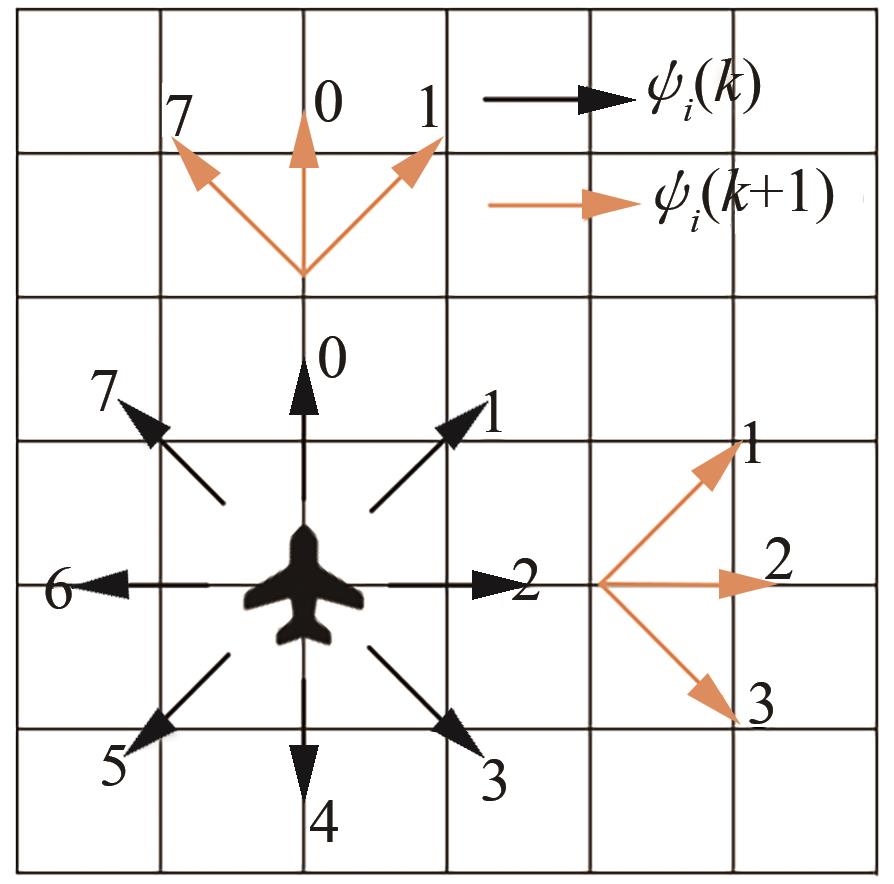

Fig.5
Principle of pheromone-guided revisit mechanism
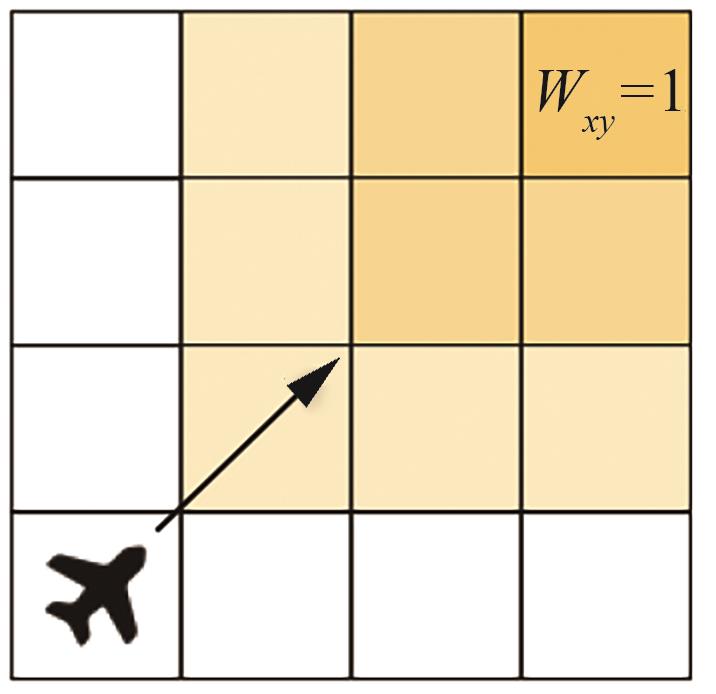

Fig.6
Search decision process for UAV subsystem

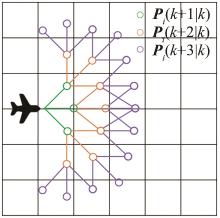
Fig.7
Path decision tree (N=3)
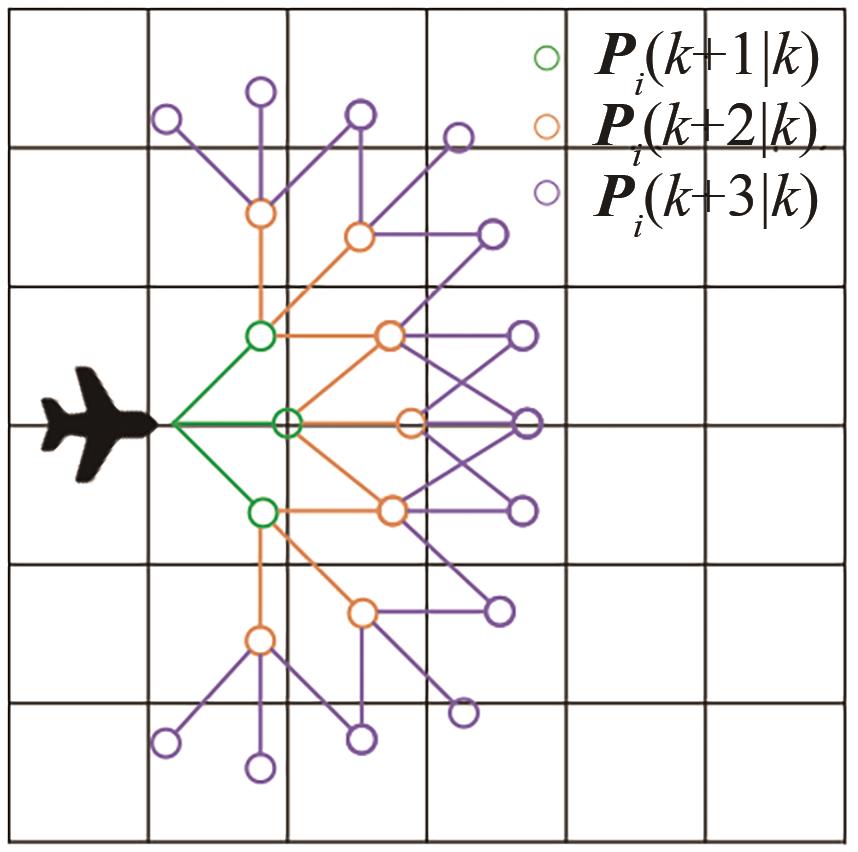
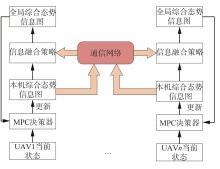
Fig.8
Distributed cooperative search decision process for UAV swarms
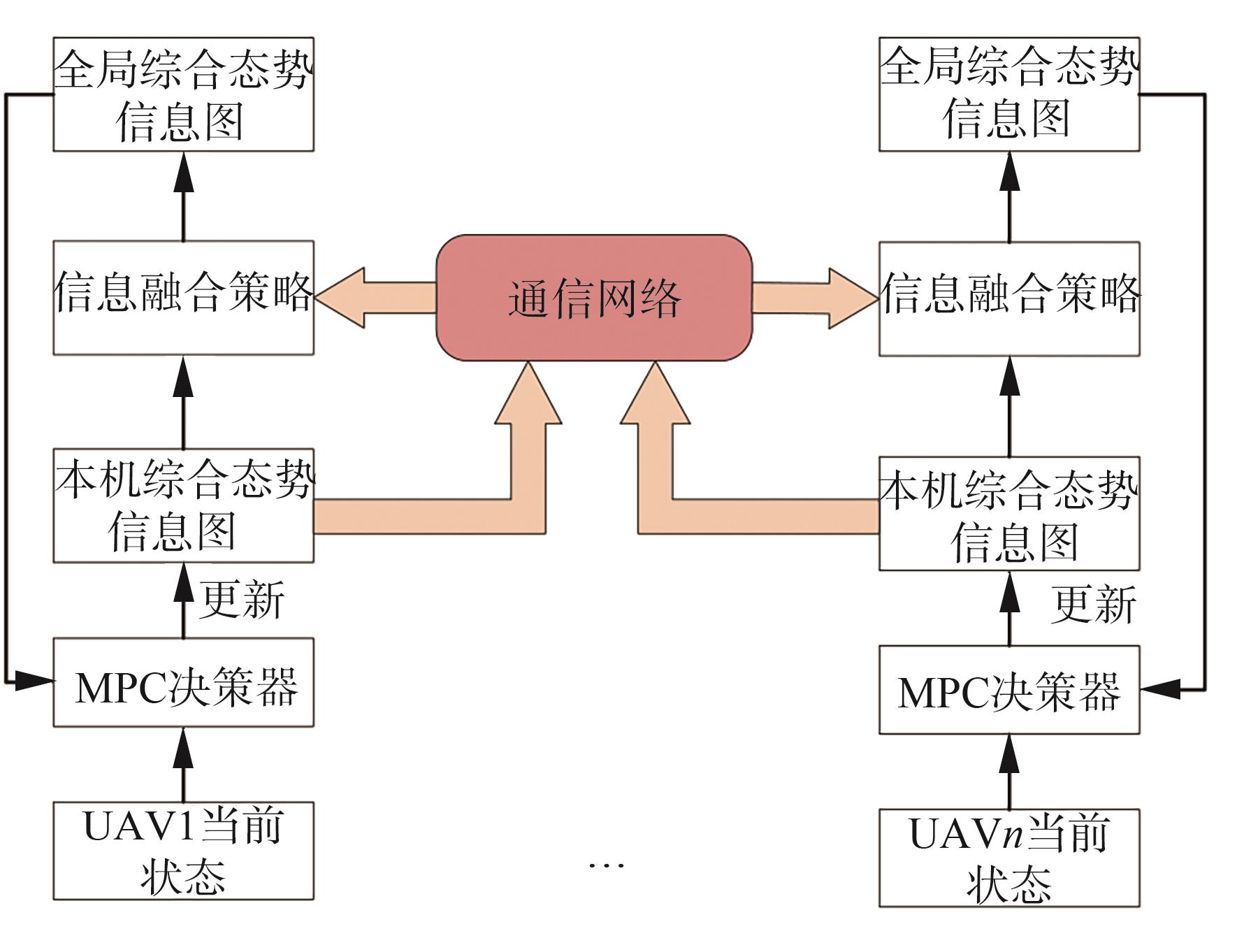
Table 1
Initial state information of UAV swarms
| UAV编号 | 初始位置/km | 初始航向/(°) | 平飞速度/( |
|---|---|---|---|
| 1 | (1,1) | 45 | 100 |
| 2 | (50,1) | 135 | |
| 3 | (1,50) | ||
| 4 | (50,50) |
Table 2
Parameters of sensor performance
| 参数 | 探测范围/ | ||
|---|---|---|---|
| 取值 | 0.8 | 0.2 |
Table 3
Parameters of comprehensive situational information map
| 峰值中心/km | TDPM | ECM | DPM | ||
|---|---|---|---|---|---|
| (15,15) | 0.020 | 40 | 0.90 | 0.05 | 0.60 |
| (20,25) | 0.010 | 40 | |||
| (25,30) | 0.015 | 35 | |||
| (30,40) | 0.020 | 30 | |||
| (35,35) | 0.025 | 40 | |||
Table 4
Parameters of RM-DCSD algorithm
| 参数 | ||||||
|---|---|---|---|---|---|---|
| 取值 | 0.25 | 0.25 | 0.25 | 0.10 | 0.15 | 3 |
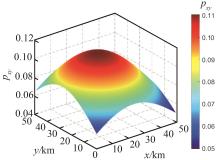
Fig.9
Initial distribution of target probability
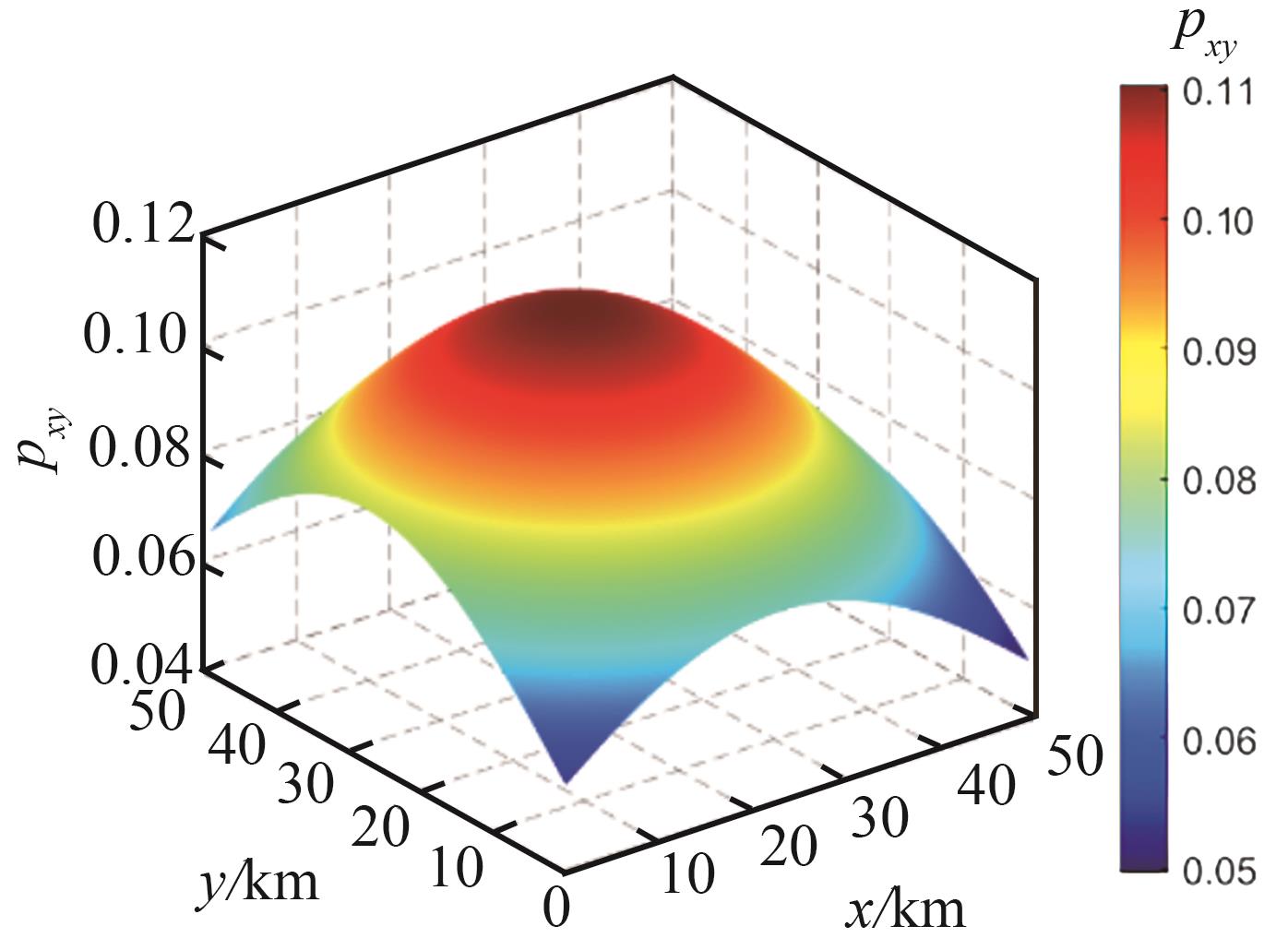
Fig.10
Initial distribution of environmental uncertainty

Fig.11
Results of cooperative search planning
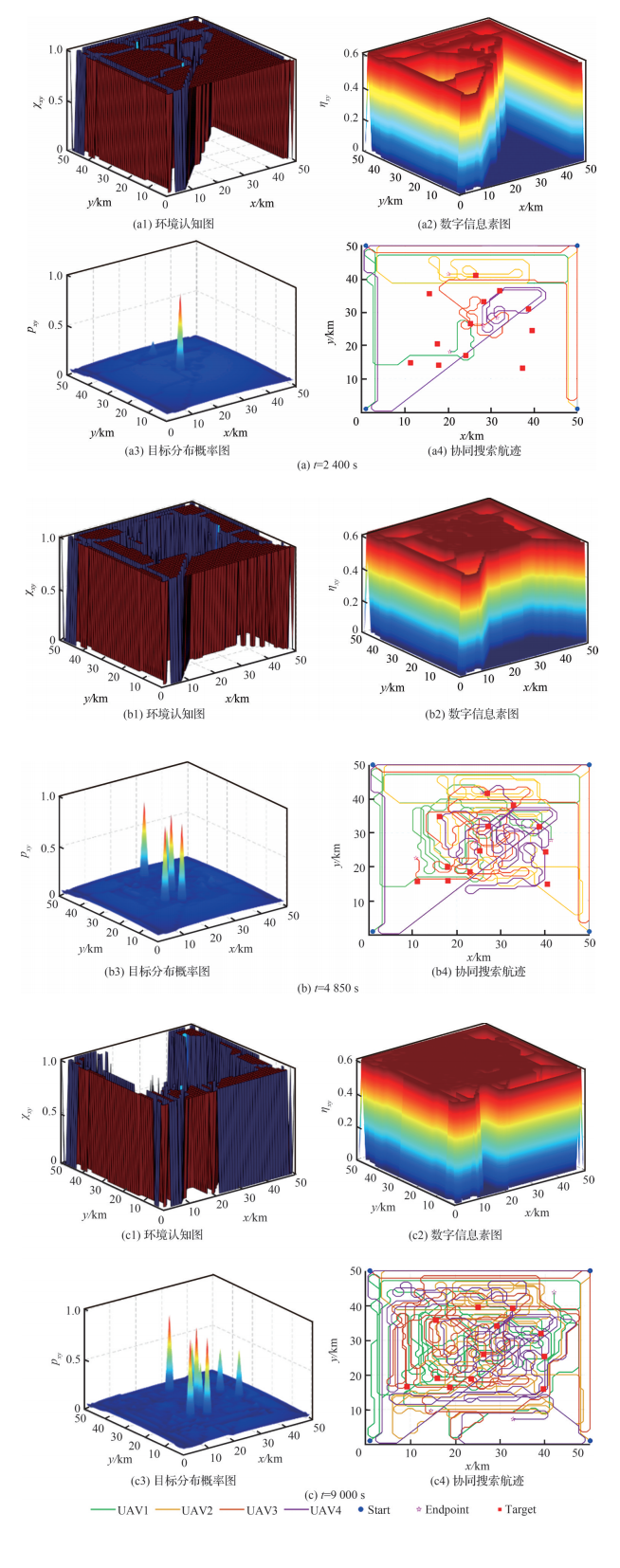
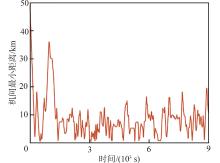
Fig.12
Minimum distance variation among UAVs
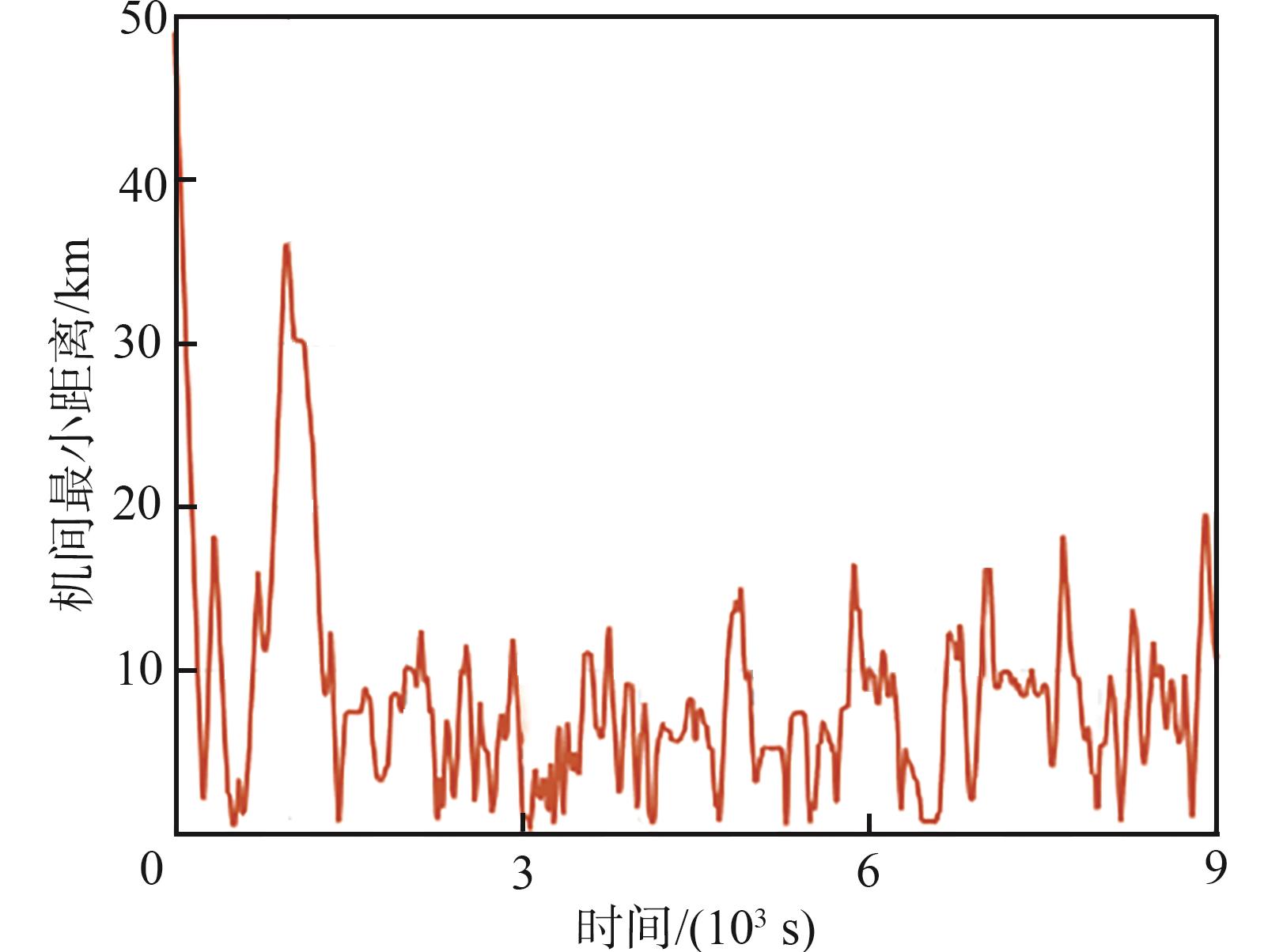
Table 5
Mean and standard deviation of evaluation indicators
| 决策机制 | 区域覆盖率/% | 动目标捕获数量 | ||
|---|---|---|---|---|
| 平均值 | 标准差 | 平均值 | 标准差 | |
| 1 | 94.92 | 1.95 | 2.83 | 1.46 |
| 2 | 92.28 | 3.15 | 2.52 | 1.52 |

Fig.13
Comparison of planning results of two decision-making mechanisms
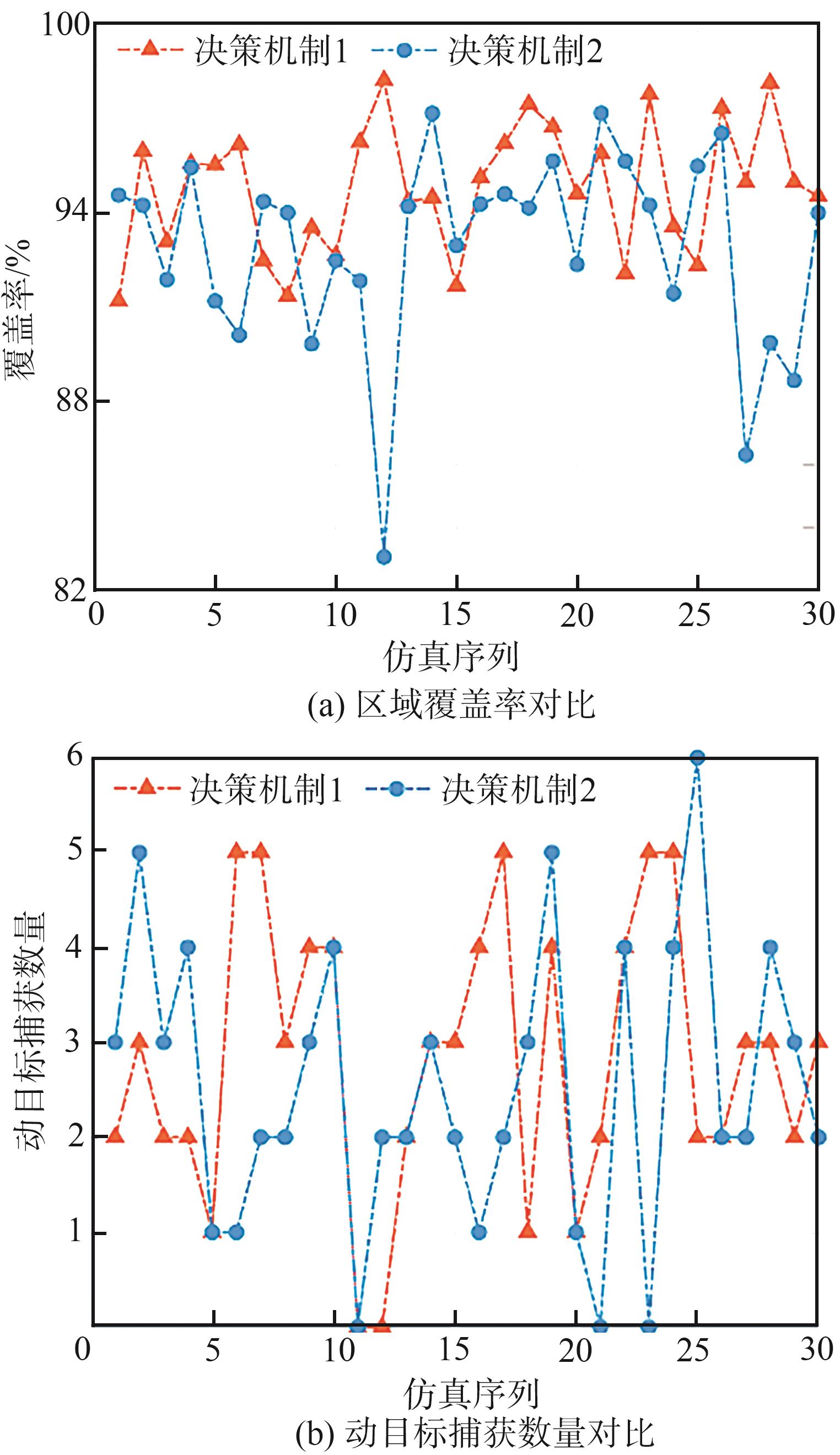
Table 6
Experimental setup for validation of revisit mechanism
| 组别 | 回访机制 |
|---|---|
| 基准组1 | 无 |
| 对照组2 | 1 |
| 对照组3 | 2 |
| 对照组4 | 1, 2 |

Fig.14
Comparison of planning results of standard control group experiments
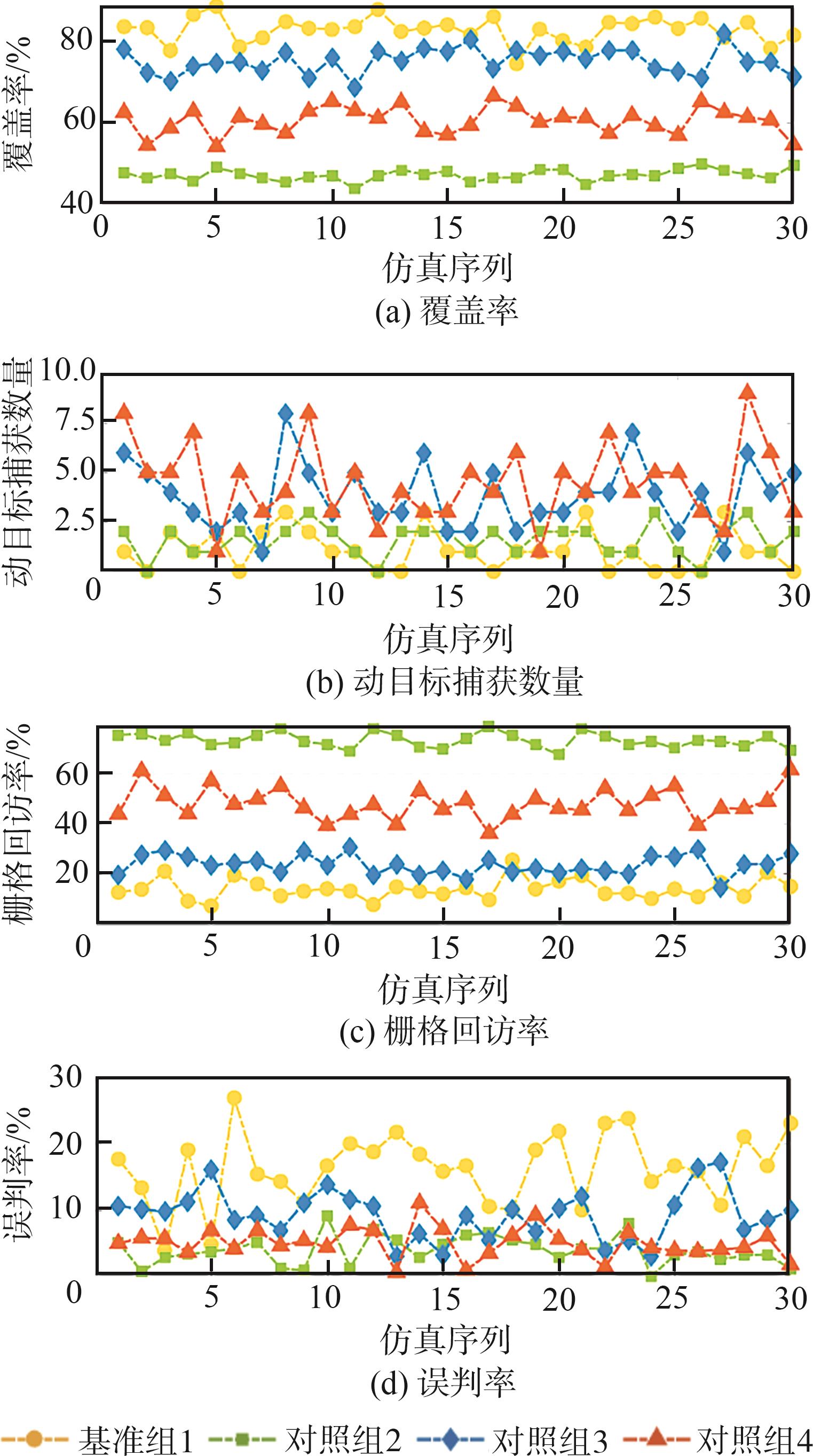
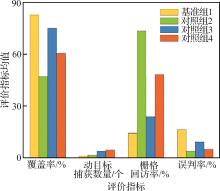
Fig.15
Comparison of mean of evaluation indicators
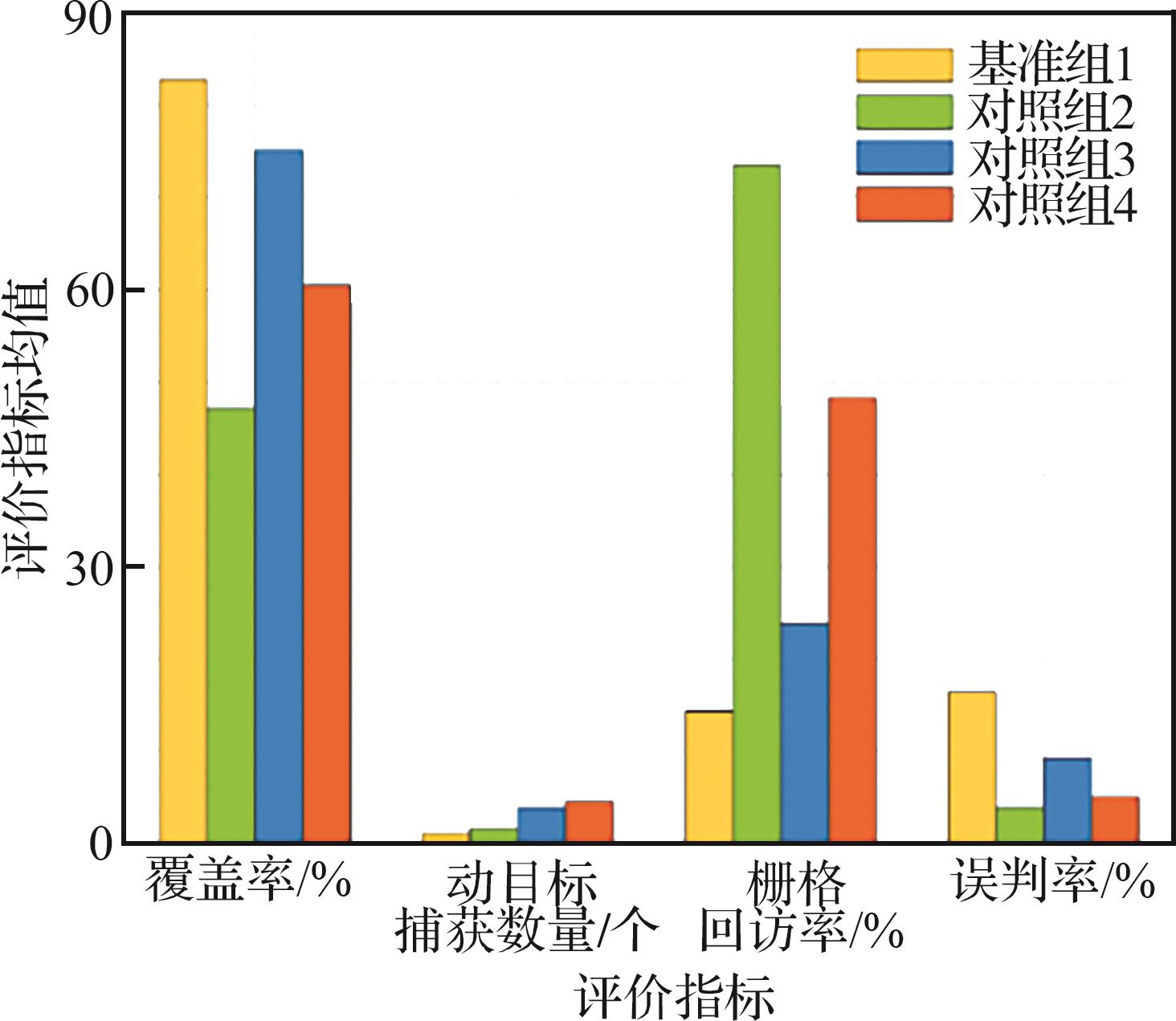

Fig.16
Cooperative search efficiency of UAV swarms with different scales
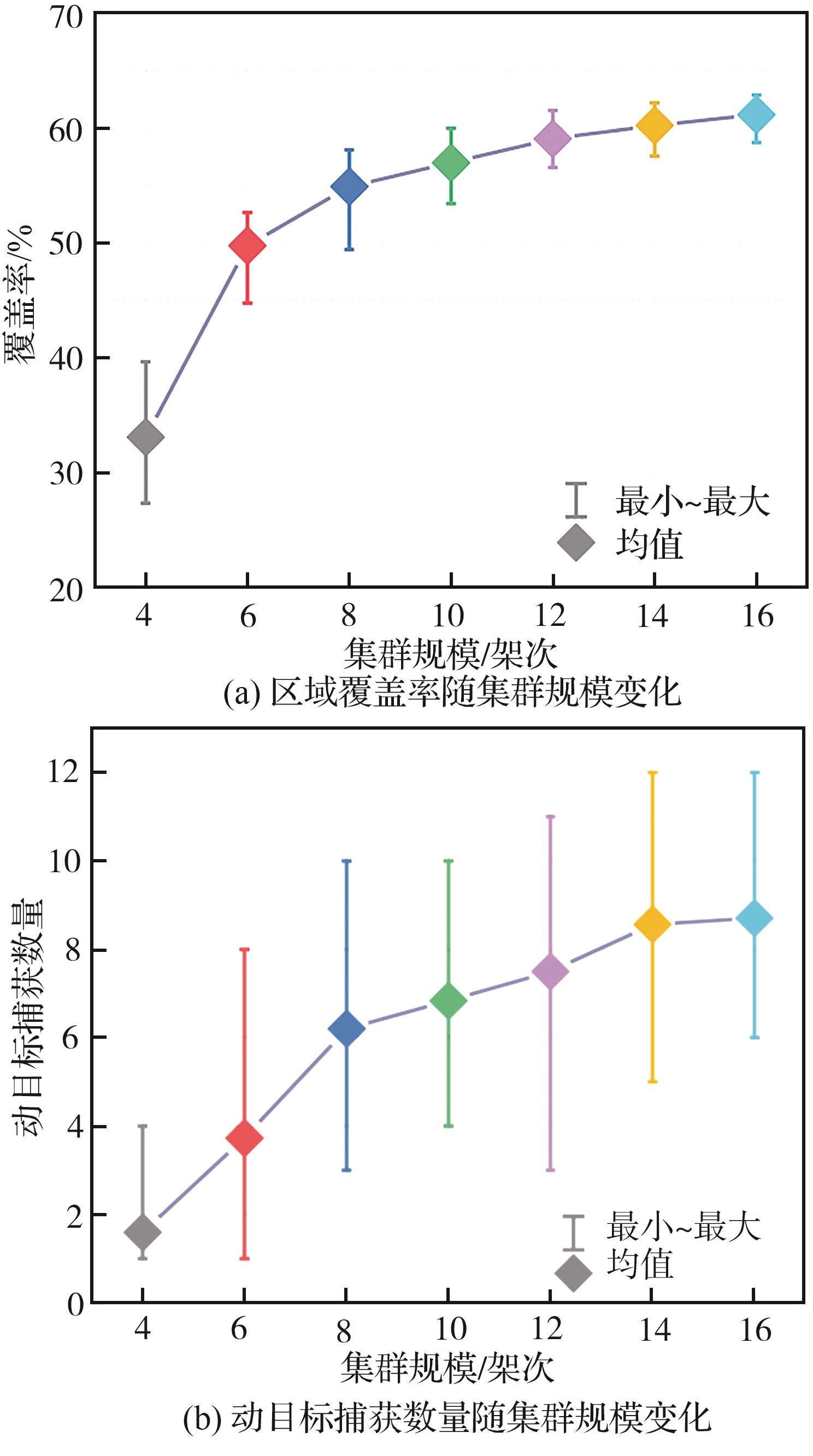
Table 7
Mean of evaluation indicators
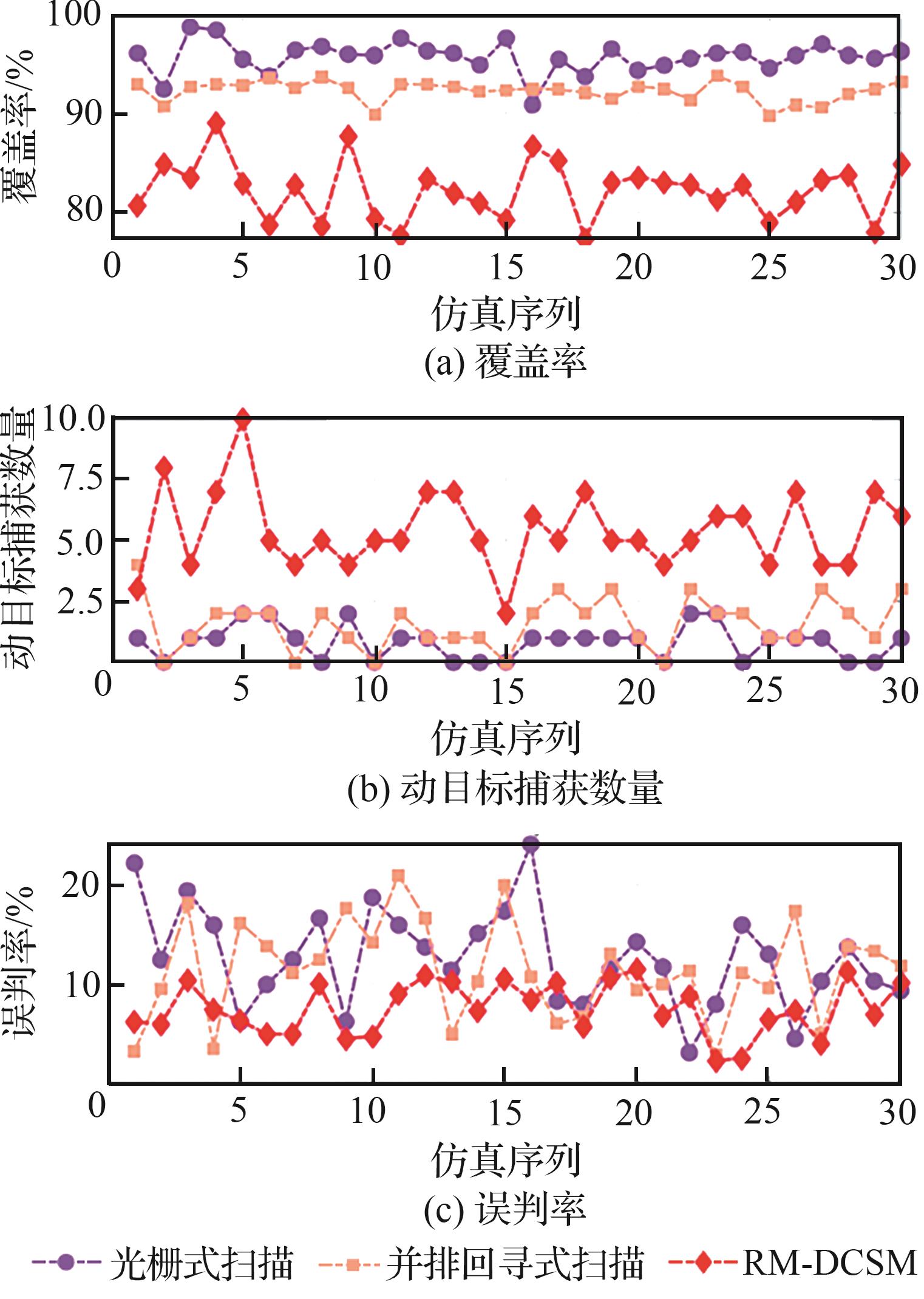
| 搜索方法 | 区域覆盖率/% | 动目标捕获数量 | 误判率/% |
|---|---|---|---|
| 光栅式扫描 | 95.63 | 0.83 | 12.70 |
| 并排回寻式扫描 | 92.21 | 1.60 | 11.53 |
| RM-DCSD | 82.24 | 5.40 | 7.56 |

Fig.17
Comparison of planning results for three
| 1 | ZHANG J, XING J H. Cooperative task assignment of multi-UAV system[J]. Chinese Journal of Aeronautics, 2020, 33(11): 2825-2827. |
| 2 | ZHOU Y K, RAO B, WANG W. UAV swarm intelligence: Recent advances and future trends[J]. IEEE Access, 2020, 8: 183856-183878. |
| 3 | 侯岳奇, 梁晓龙, 何吕龙, 等. 未知环境下无人机集群协同区域搜索算法[J]. 北京航空航天大学学报, 2019, 45(2): 347-356. |
| HOU Y Q, LIANG X L, HE L L, et al. Cooperative area search algorithm for UAV swarm in unknown environment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2): 347-356 (in Chinese). | |
| 4 | MILLET T, CASBEER D, MERCKER T, et al. Multi-agent decentralized search of a probability map with communication constraints: AIAA-2010-8424[R]. Reston: AIAA, 2010. |
| 5 | KHAN A, YANMAZ E, RINNER B. Information exchange and decision making in micro aerial vehicle networks for cooperative search[J]. IEEE Transactions on Control of Network Systems, 2015, 2(4): 335-347. |
| 6 | 王宁, 李哲, 梁晓龙, 等. 通信距离受限条件下的无人机集群协同区域搜索[J]. 系统工程与电子技术, 2022, 44(5): 1615-1625. |
| WANG N, LI Z, LIANG X L, et al. Cooperative region search of UAV swarm with limited communication distance[J]. Systems Engineering and Electronics, 2022, 44(5): 1615-1625 (in Chinese). | |
| 7 | 张哲璇, 龙腾, 徐广通, 等. 重访机制驱动的多无人机协同动目标搜索方法[J]. 航空学报, 2020, 41(5): 323314. |
| ZHANG Z X, LONG T, XU G T, et al. Revisit mechanism driven multi-UAV cooperative search planning method for moving targets[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(5): 323314 (in Chinese). | |
| 8 | YANG Y, MINAI A A, POLYCARPOU M M. Evidential map-building approaches for multi-UAV cooperative search[C]∥ Proceedings of the 2005, American Control Conference. Piscataway: IEEE Press, 2005: 116-121. |
| 9 | KHAN A, YANMAZ E, RINNER B. Information merging in multi-UAV cooperative search[C]∥ 2014 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2014: 3122-3129. |
| 10 | DUAN H B, ZHAO J X, DENG Y M, et al. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 706-720. |
| 11 | 沈东, 魏瑞轩, 祁晓明, 等. 基于MTPM和DPM的多无人机协同广域目标搜索滚动时域决策[J]. 自动化学报, 2014, 40(7): 1391-1403. |
| SHEN D, WEI R X, QI X M, et al. Receding horizon decision method based on MTPM and DPM for multi-UAVs cooperative large area target search[J]. Acta Automatica Sinica, 2014, 40(7): 1391-1403 (in Chinese). | |
| 12 | RU C J, QI X M, GUAN X N. Distributed cooperative search control method of multiple UAVs for moving target[J]. International Journal of Aerospace Engineering, 2015, 2015: 1-12. |
| 13 | 吴傲, 杨任农, 梁晓龙, 等. 基于信息素决策的无人机集群协同搜索算法[J]. 北京航空航天大学学报, 2021, 47(4): 814-827. |
| WU A, YANG R N, LIANG X L, et al. Cooperative search algorithm based on pheromone decision for UAV swarm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(4): 814-827 (in Chinese). | |
| 14 | SAADAOUI H, BOUANANI F EL. Information sharing based on local PSO for UAVs cooperative search of unmoved targets[C]∥ 2018 International Conference on Advanced Communication Technologies and Networking (CommNet). Piscataway: IEEE Press, 2018: 1-6. |
| 15 | 彭辉, 苏菲, 沈林成. 用于多无人机广域目标搜索的扩展搜索图方法[J]. 系统工程与电子技术, 2010, 32(4): 795-798. |
| PENG H, SU F, SHEN L C. Extended search map approach for multiple UAVs wide area target searching[J]. Systems Engineering and Electronics, 2010, 32(4): 795-798 (in Chinese). | |
| 16 | GURUPRASAD K R, GHOSE D. Automated multi-agent search using centroidal Voronoi configuration[J]. IEEE Transactions on Automation Science and Engineering, 2011, 8(2): 420-423. |
| 17 | XU X L, MENG W, CAI Q Q, et al. Multiagent coverage search based on Voronoi and sparse heteroscedastic Gaussian process[J]. Asian Journal of Control, 2022: 1-16. |
| 18 | 戴健, 许菲, 陈琪锋. 多无人机协同搜索区域划分与路径规划[J]. 航空学报, 2020, 41(S1): 723770. |
| DAI J, XU F, CHEN Q F. Multi-UAV cooperative search on region division and path planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723770 (in Chinese). | |
| 19 | 于驷男, 周锐, 夏洁, 等. 多无人机协同搜索区域分割与覆盖[J]. 北京航空航天大学学报, 2015, 41(1): 167-173. |
| YU S N, ZHOU R, XIA J, et al. Decomposition and coverage of multi-UAV cooperative search area[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(1): 167-173 (in Chinese). | |
| 20 | VINH K, GEBREYOHANNES S, KARIMODDINI A. An area-decomposition based approach for cooperative tasking and coordination of UAVs in a search and coverage mission[C]∥ 2019 IEEE Aerospace Conference. Piscataway: IEEE Press, 2019: 1-8. |
| 21 | 符小卫, 魏广伟, 高晓光. 不确定环境下多无人机协同区域搜索算法[J]. 系统工程与电子技术, 2016, 38(4): 821-827. |
| FU X W, WEI G W, GAO X G. Cooperative area search algorithm for multi-UAVs in uncertainty environment[J]. Systems Engineering and Electronics, 2016, 38(4): 821-827 (in Chinese). | |
| 22 | 王宁, 李哲, 梁晓龙, 等. 基于搜索意图交互的无人机集群协同搜索算法[J]. 北京航空航天大学学报, 2022, 48(3): 454-463. |
| WANG N, LI Z, LIANG X L, et al. Cooperative search algorithm for UAV swarm based on search intention interaction[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(3): 454-463 (in Chinese). | |
| 23 | YAO P, WEI X. Multi-UAV information fusion and cooperative trajectory optimization in target search[J]. IEEE Systems Journal, 2022, 16(3): 4325-4333. |
| 24 | 彭辉, 沈林成, 朱华勇. 基于分布式模型预测控制的多UAV协同区域搜索[J]. 航空学报, 2010, 31(3): 593-601. |
| PENG H, SHEN L C, ZHU H Y. Multiple UAV cooperative area search based on distributed model predictive control[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(3): 593-601 (in Chinese). | |
| 25 | TRODDEN P, RICHARDS A. Multi-vehicle cooperative search using distributed model predictive control: AIAA-2008-7138[R]. Reston: AIAA, 2008. |
| 26 | LI P, DUAN H B. A potential game approach to multiple UAV cooperative search and surveillance[J]. Aerospace Science and Technology, 2017, 68: 403-415. |
| 27 | NI J J, TANG G Y, MO Z P, et al. An improved potential game theory based method for multi-UAV cooperative search[J]. IEEE Access, 2020, 8: 47787-47796. |
| 28 | SHELOKAR P S, JAYARAMAN V K, KULKARNI B D. An ant colony approach for clustering[J]. Analytica Chimica Acta, 2004, 509(2): 187-195. |
| 29 | SUN J Y, TANG J, LAO S Y. Collision avoidance for cooperative UAVs with optimized artificial potential field algorithm[J]. IEEE Access, 2017, 5: 18382-18390. |
| 30 | 曾国奇, 白宇, 林伟, 等. 地面运动目标的多UAV协同搜索方法[J]. 系统工程与电子技术, 2018, 40(7): 1498-1505. |
| ZENG G Q, BAI Y, LIN W, et al. Multi-UAV cooperative search method for ground moving targets[J]. Systems Engineering and Electronics, 2018, 40(7): 1498-1505 (in Chinese). |
| [1] | Chunhui ZHAO, Anmeng LIU, Yang LYU, Quan PAN. A survey of resilient self-localization for UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(8): 28839-028839. |
| [2] | Chuanyun WANG, Yang SU, Linlin WANG, Tian WANG, Jingjing WANG, Qian GAO. Multi-object continuous robust tracking algorithm for anti-UAV swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 329017-329017. |
| [3] | Yunpeng CAI, Dapeng ZHOU, Jiangchuan DING. Intelligent collaborative control of UAV swarms with collision avoidance safety constraints [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529683-529683. |
| [4] | Tao WANG, Xuefeng GAO, Jinping ZHU, Song DONG, Lianjun SUN, Kan ZHENG. Chatter online monitoring of robotic longitudinal⁃torsional ultrasonic edge trimming [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(13): 262-272. |
| [5] | SU Lingfei, HUA Yongzhao, DONG Xiwang, REN Zhang. Human-UAV swarm multi-modal intelligent interaction methods [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S1): 727001-727001. |
| [6] | WANG Xiaoyue, WANG Xun, WANG Yongzhen, FEI Teng, LIU Dawei. Evaluation method for combat effectiveness of task-based simulated UAV swarm system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S1): 726937-726937. |
| [7] | LIN Jing, ZHANG Boyao, ZHANG Dayi, CHEN Min. Research status and prospect of fault diagnosis for gas turbine aeroengine [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 626565-626565. |
| [8] | XU Guangtong, WANG Zhu, CAO Yan, SUN Jingliang, LONG Teng. Dynamic-priority-decoupled UAV swarm trajectory planning using distributed sequential convex programming [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(2): 325059-325059. |
| [9] | NI Yuan, YANG Hao, JIANG Bin. Fault tolerant game control of swarm confrontation with decision faults [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(4): 524978-524978. |
| [10] | YE Zipeng, ZHOU Qingrui, WANG Hui. Distributed autonomous relative navigation method for spacecraft formation near solar L2 [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(2): 324145-324145. |
| [11] | YIN Dongliang, HUANG Xiaoying, WU Yanjie, HE Youchen, XIE Jingwei. Target recognition decision method based on cloud model and improved D-S evidence theory [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(12): 324768-324768. |
| [12] | WANG Wei, XING Chaoyang, FENG Wenshuai. State of the art and perspectives of autonomous navigation technology [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 525049-525049. |
| [13] | TANG Shuaiwen, ZHOU Zhijie, JIANG Jiang, CAO You, CHEN Yuan, YE Yanqing. Consensus evaluation of UAV swarm cooperative situation awareness considering perturbation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724233-724233. |
| [14] | LIANG Shuai, YANG Lin, YANG Zhaoxu, XU Bin. Kalman filter based T-S fuzzy control for morphing aircraft [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724274-724274. |
| [15] | XU Lei, ZHOU Lisha, LI Renjun, GU Cunfeng. Application of millimeter wave beam coding technology in UAV intelligent swarm [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723754-723754. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341