ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (10): 327621.doi: 10.7527/S1000-6893.2022.27621
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Yutong ZHANG, Jianmei SONG, Yan DING( ), Jinpeng LIU
), Jinpeng LIU
Received:2022-06-14
Revised:2022-08-04
Accepted:2022-09-15
Online:2023-05-25
Published:2022-09-30
Contact:
Yan DING
E-mail:dingyan@bit.edu.cn
Supported by:CLC Number:
Yutong ZHANG, Jianmei SONG, Yan DING, Jinpeng LIU. Heterogeneous collaborative SLAM based on fisheye and RGBD cameras[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327621.

Fig. 1
Framework of heterogeneous collaborative SLAM system
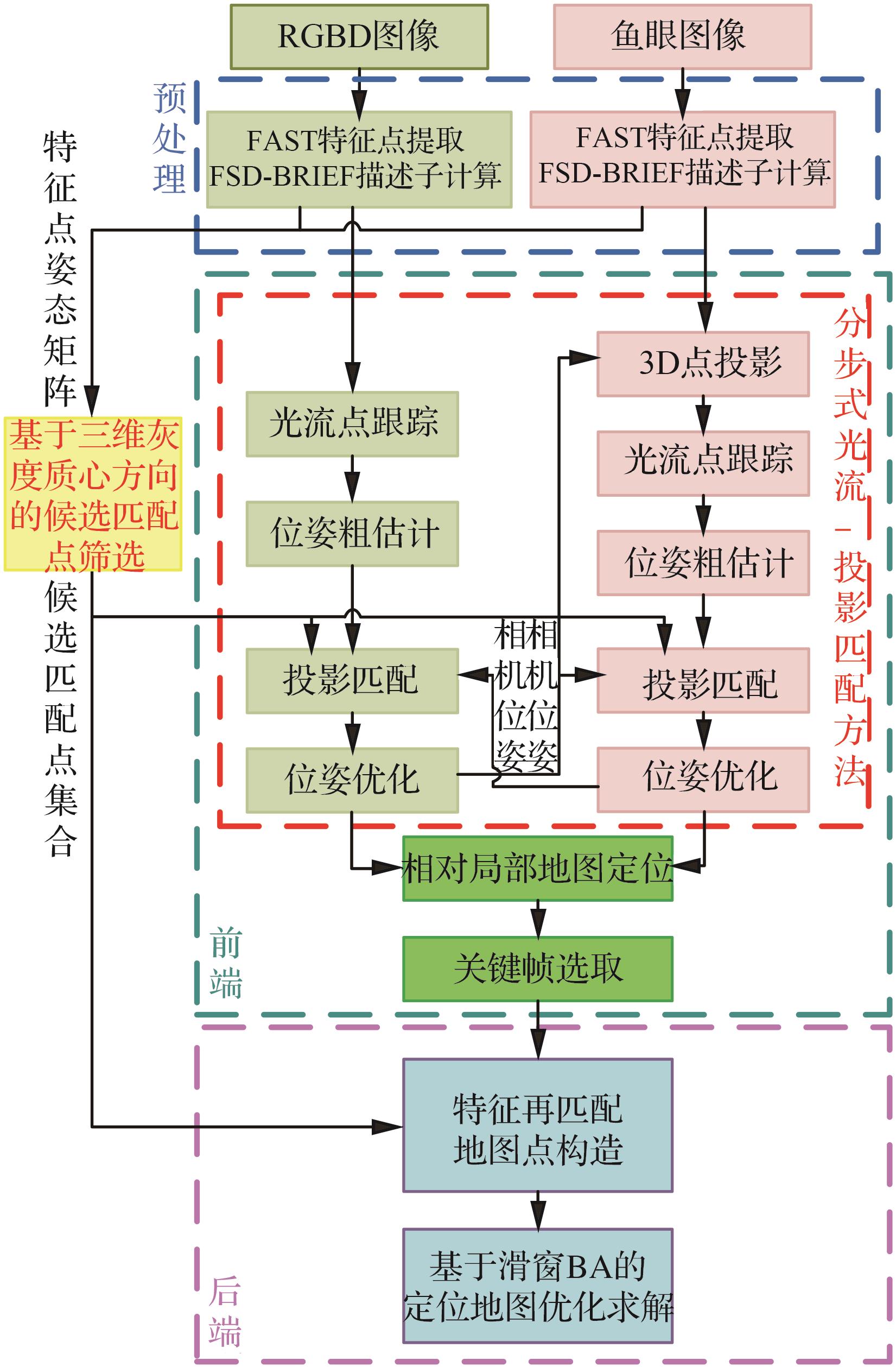

Fig. 2
General view of FSD-BRIEF descriptor
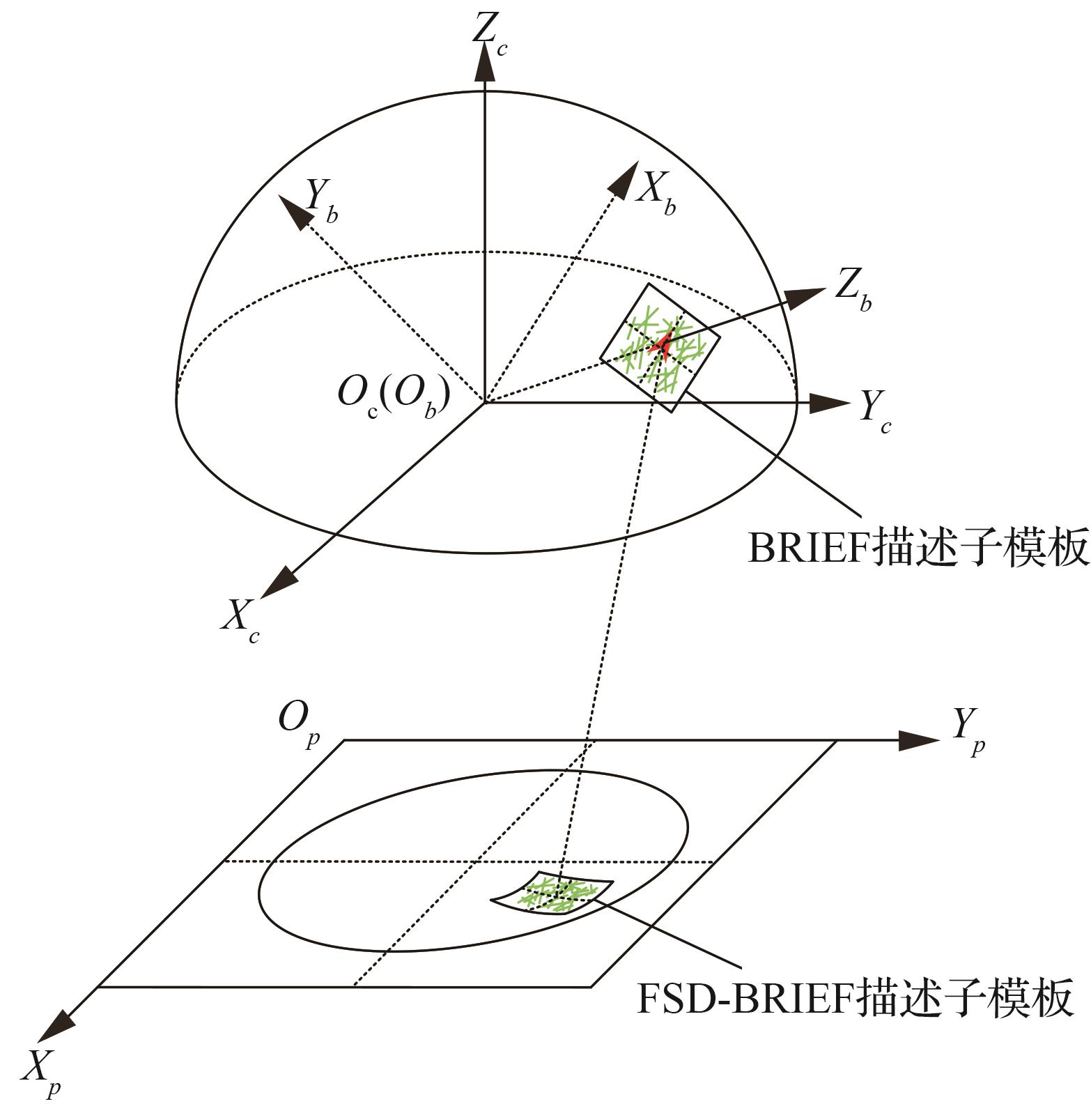
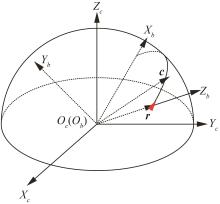
Fig. 3
Attitude coordinate system of a feature point in camera
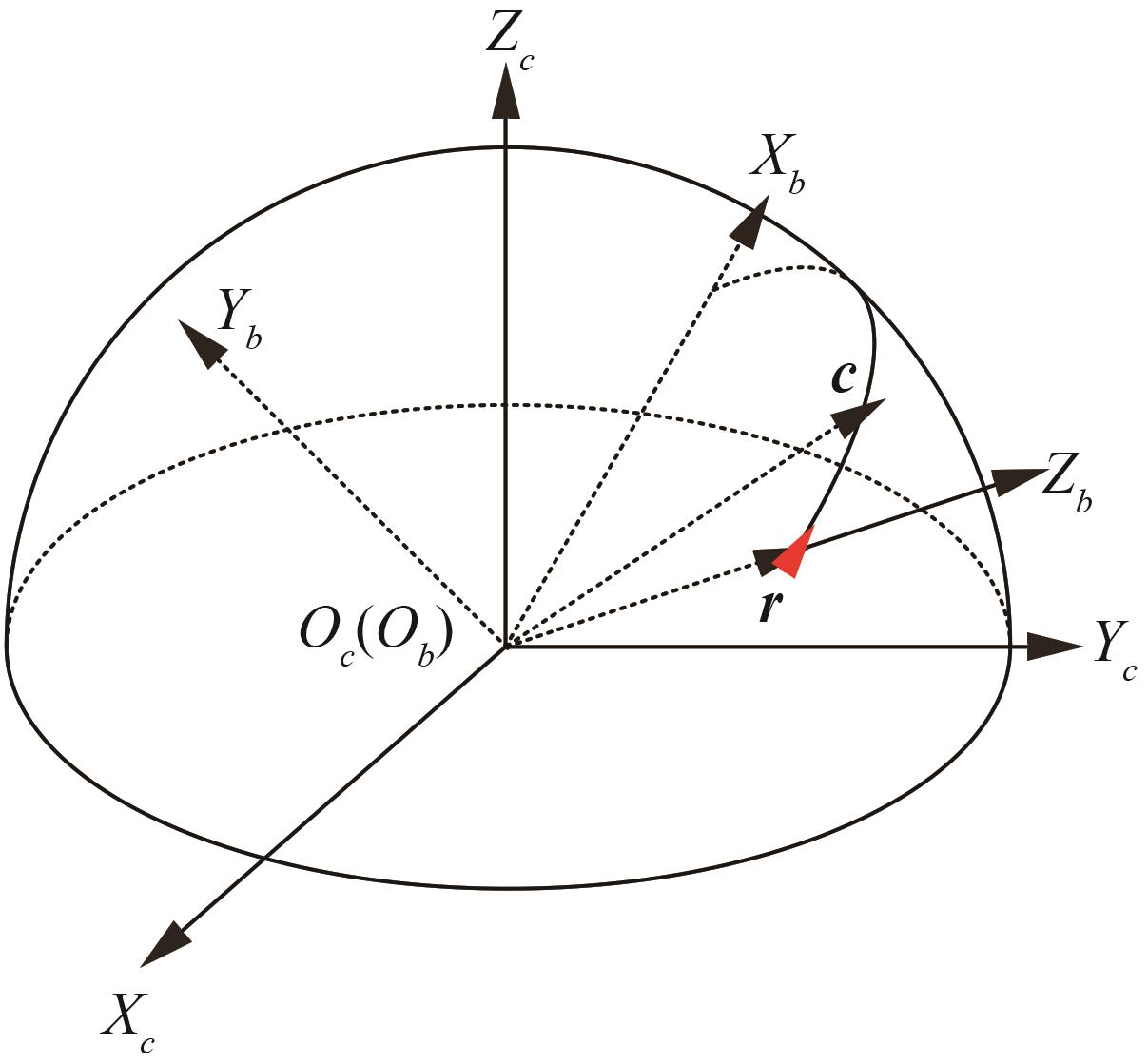

Fig. 4
Direction consistency of matching feature points
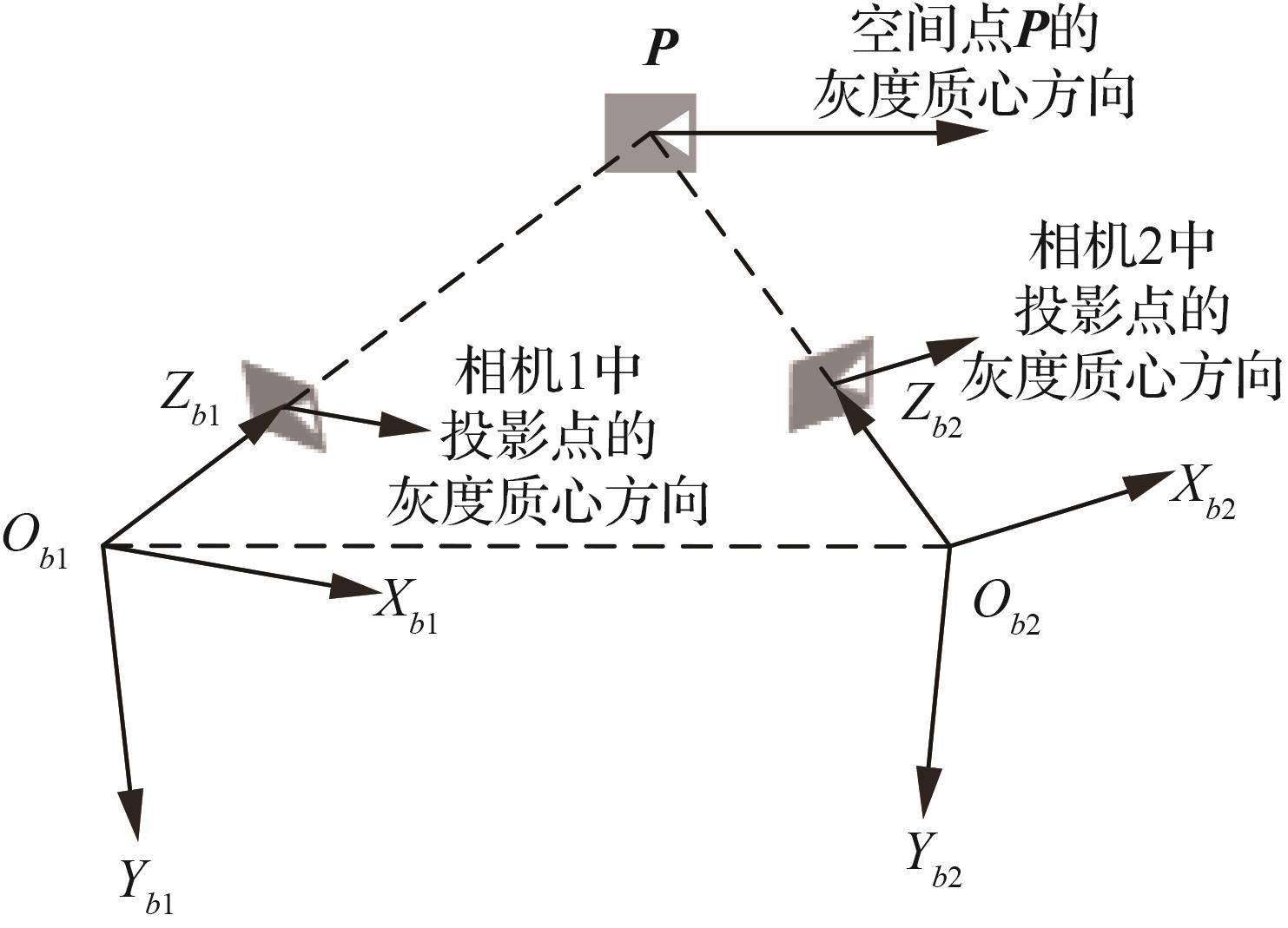
Fig. 5
Geometric variables in feature points’ direction consistency
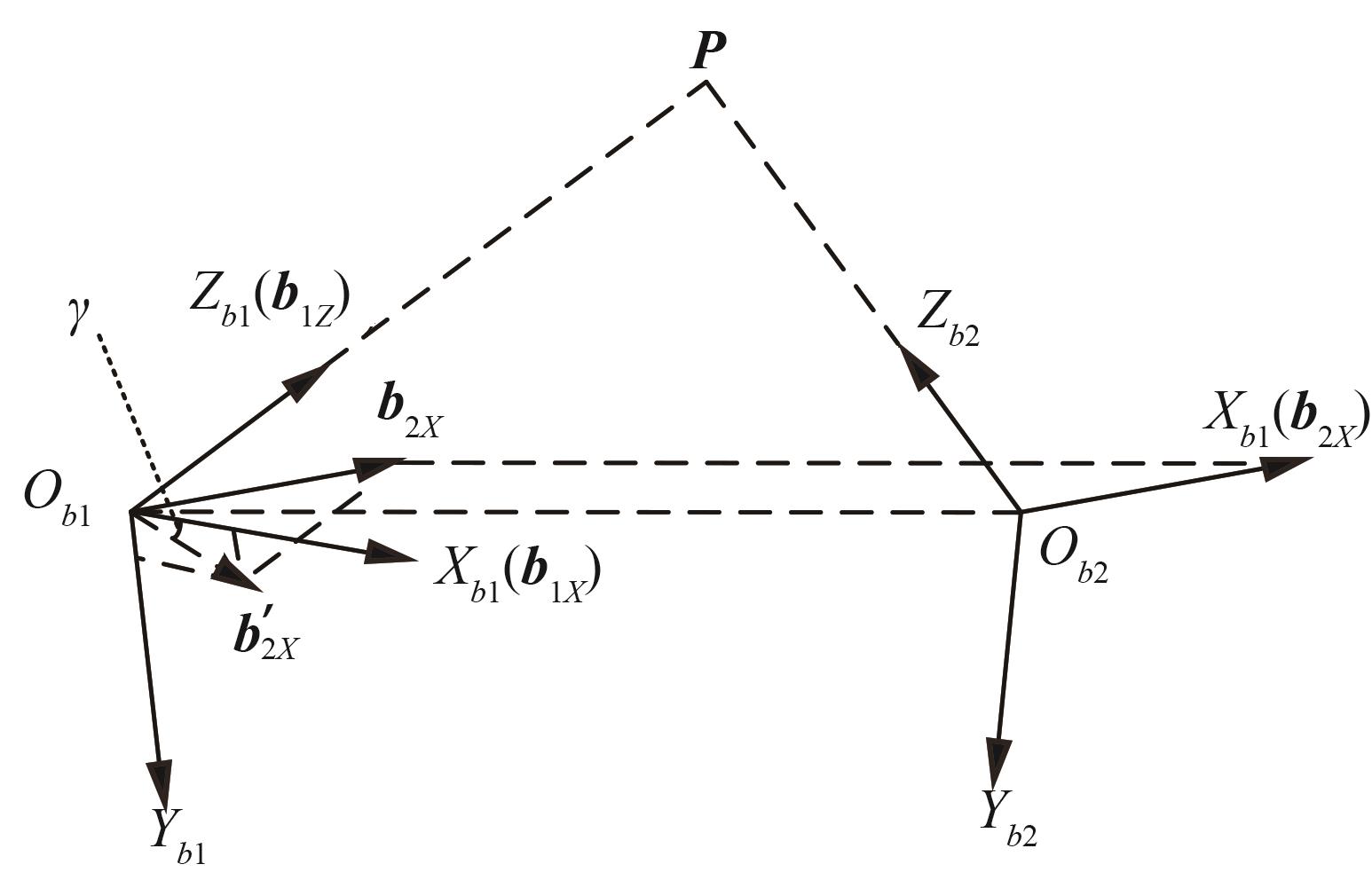

Fig. 6
Target image for feature matching algorithm test


Fig. 7
Sample pictures taken by fisheye and RGBD cameras


Fig. 8
PR curves result of two versions of matching algorithms


Fig. 9
Step-by-step optical flow and projection matching process for fisheye image
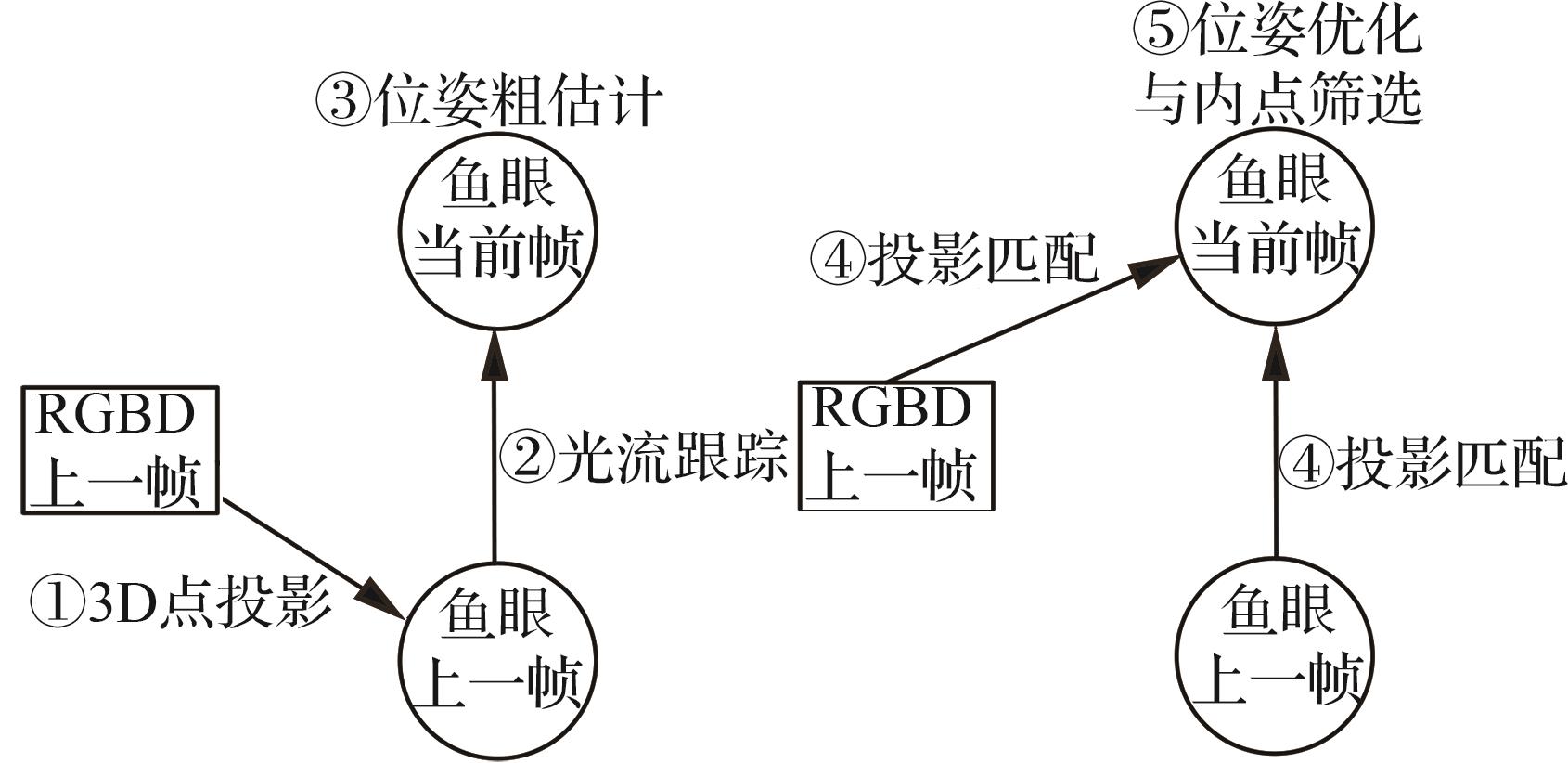
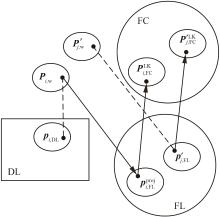
Fig. 10
Schematic diagram of current frame optical flow tracking process of fisheye camera
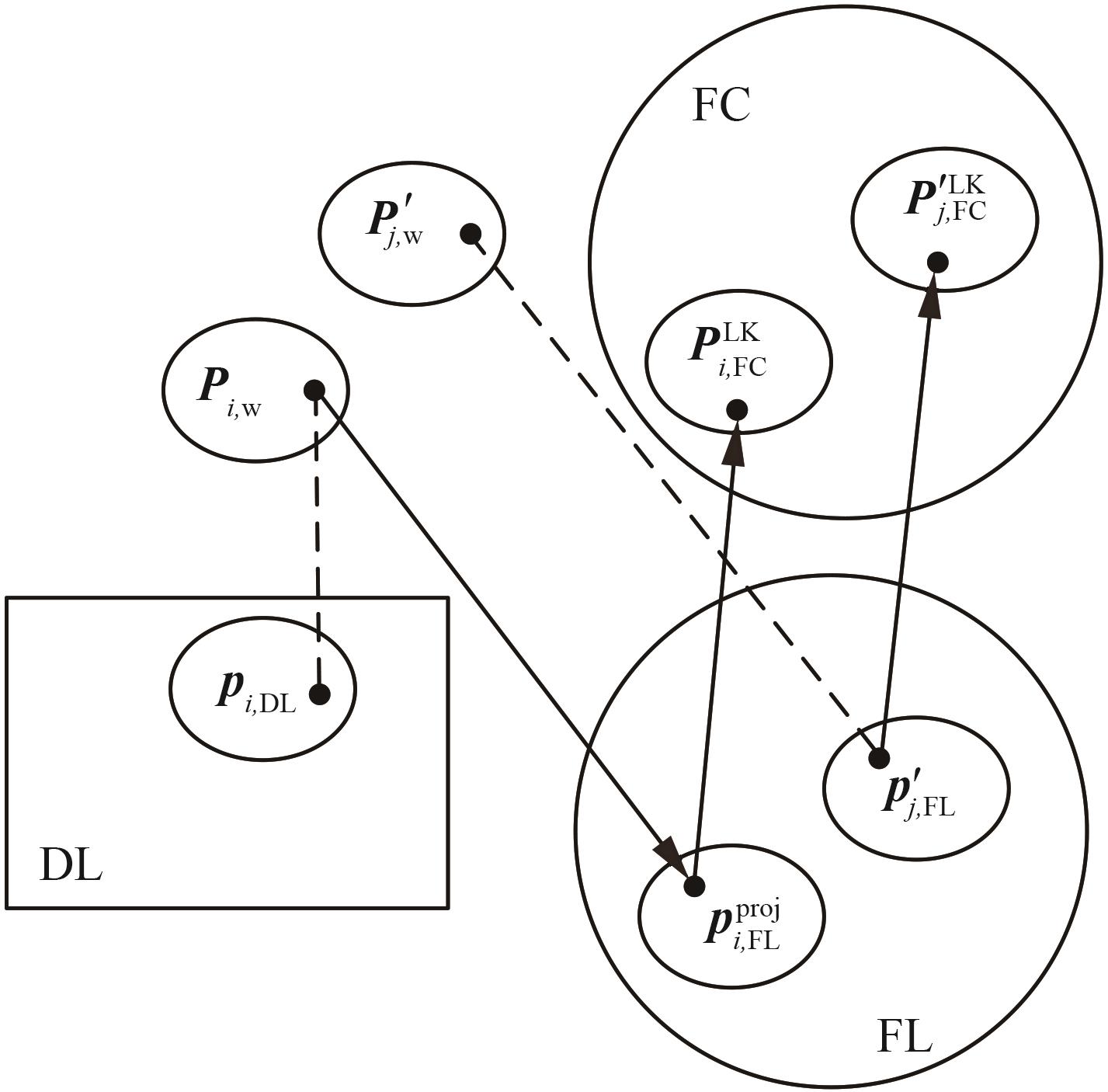
Fig. 11
Schematic diagram of current frame projection matching process of fisheye camera

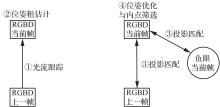
Fig. 12
Step-by-step optical flow and projection matching process for RGBD image
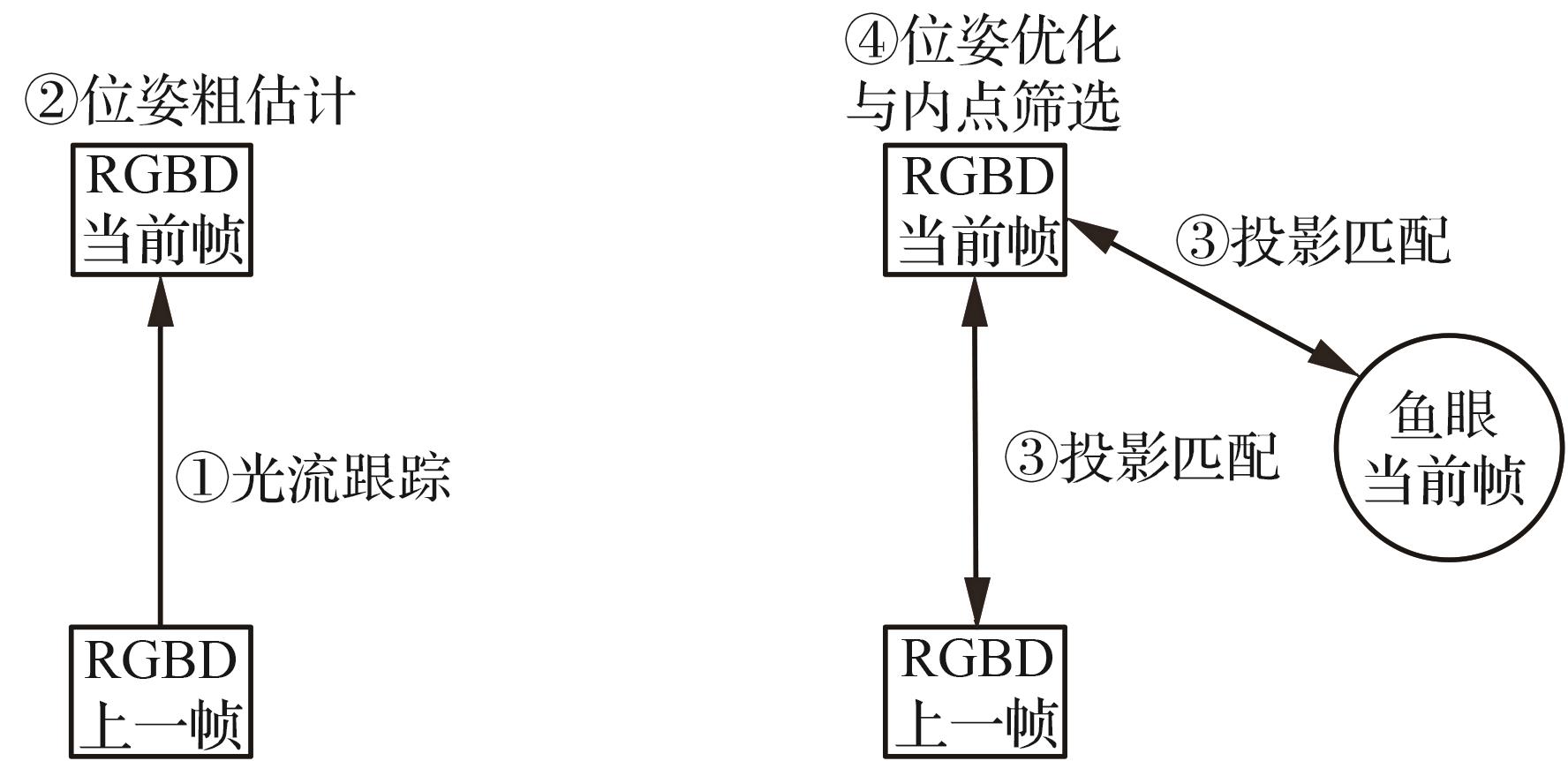
Fig. 13
Schematic diagram of current frame optical flow tracking process of RGBD camera
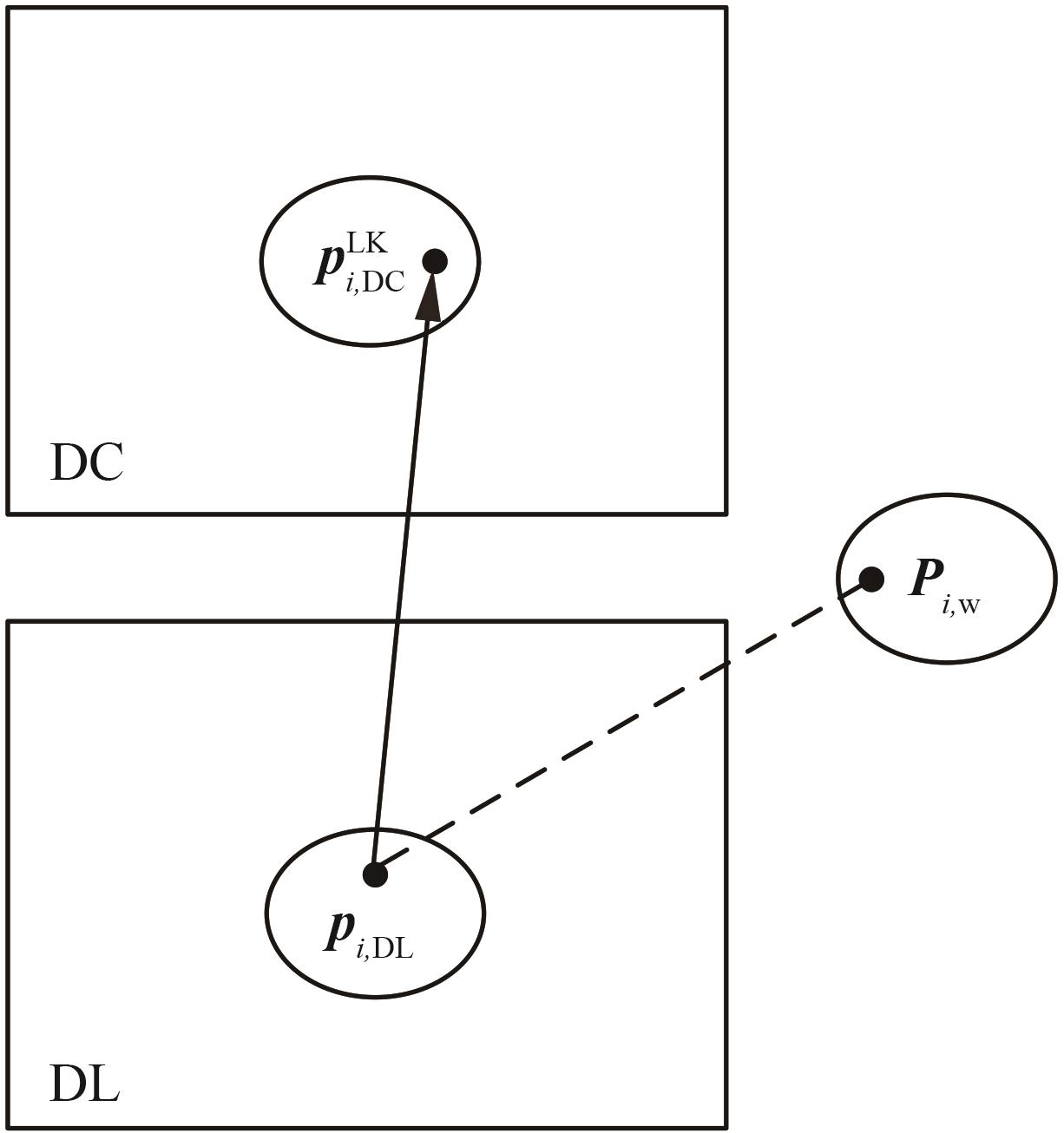

Fig. 14
Schematic diagram of current frame projection matching process of RGBD camera
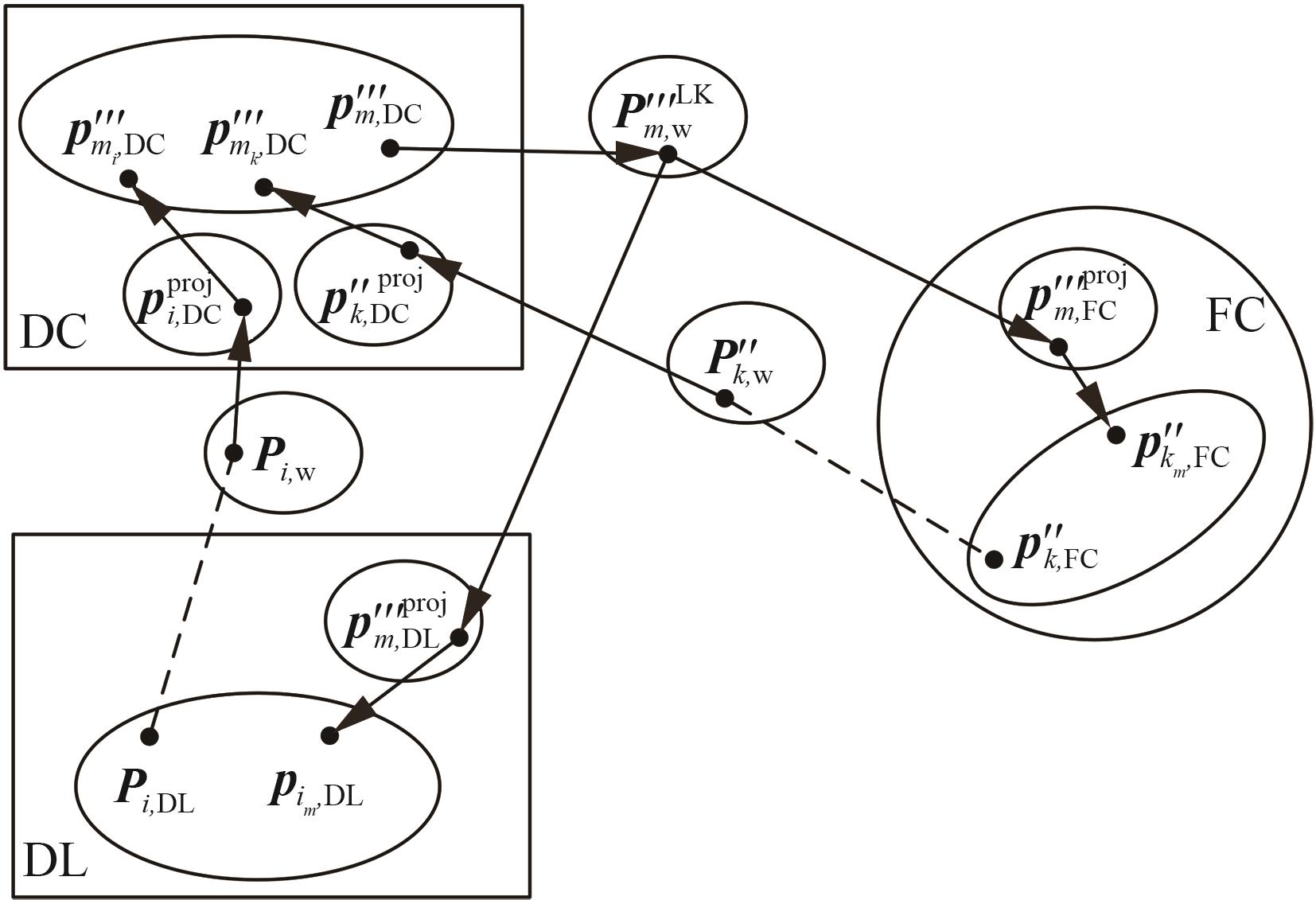
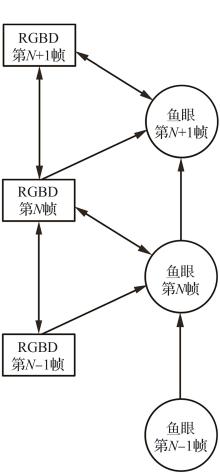
Fig. 15
Iterative operation of step-by-step optical flow and projection matching method in heterogeneous image flow

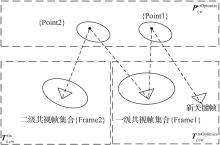
Fig. 16
Common view frames and points of a new key frame
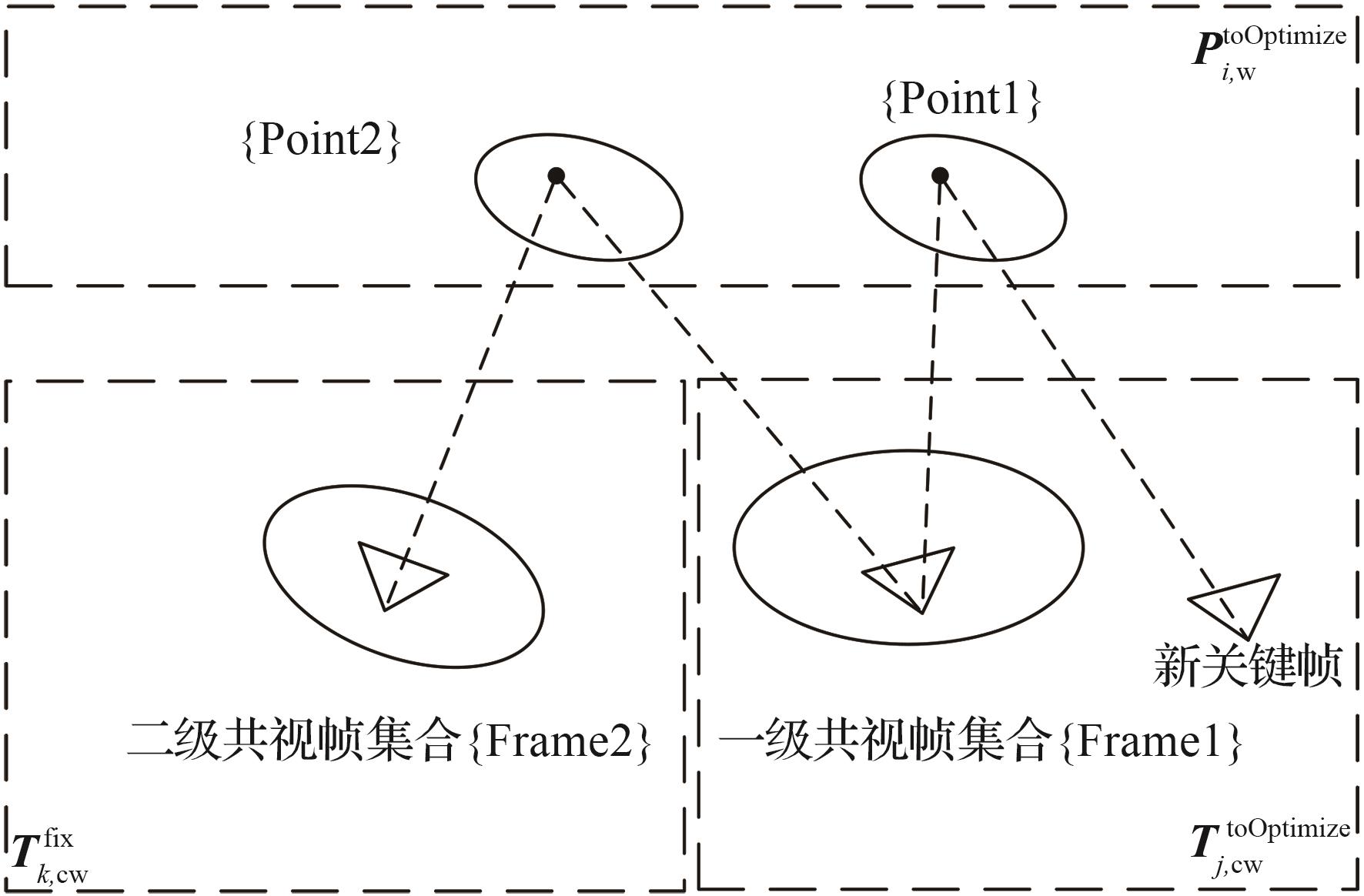
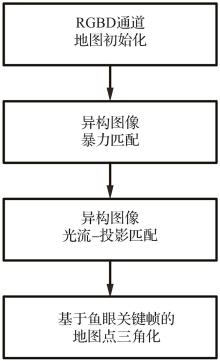
Fig. 17
Initialization process of heterogeneous collaborative SLAM system
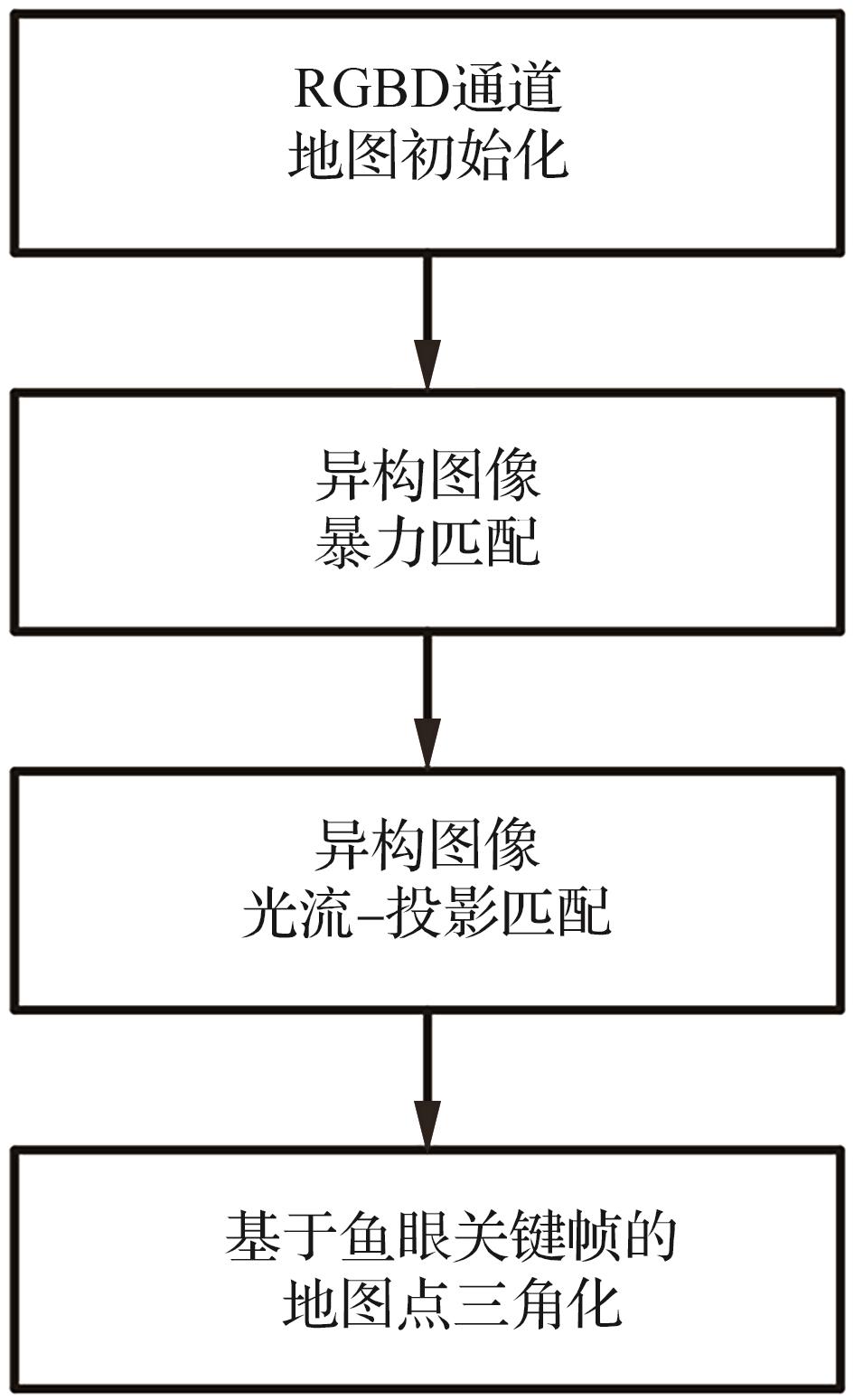

Fig. 18
Several examples of matching results of proposed heterogeneous matching method
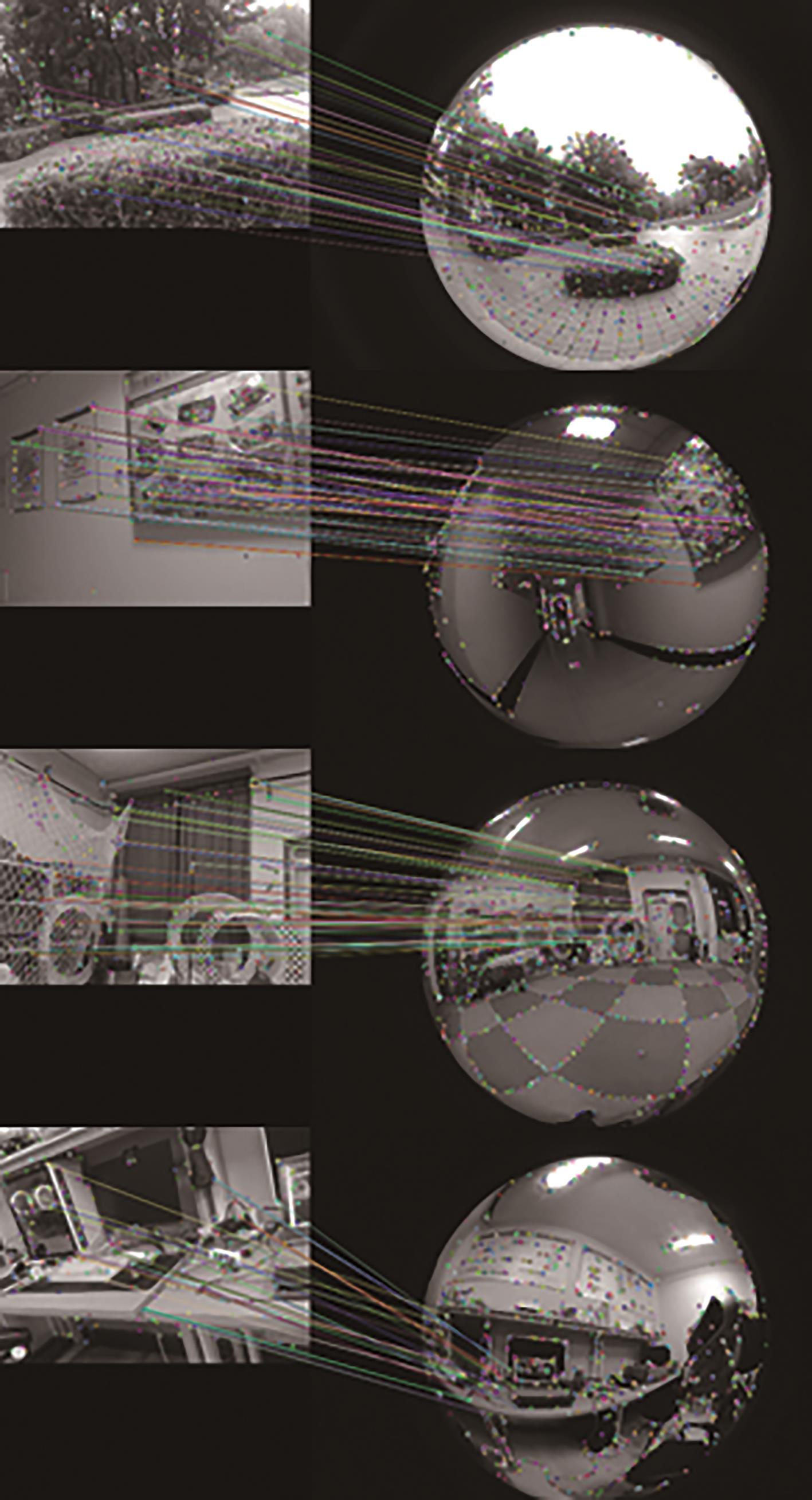
Table 1
Matching success times and success rate in different data sets
| 数据集 | 匹配 次数 | 本文算法 | 暴力匹配 | BoW | FLANN | ||||
|---|---|---|---|---|---|---|---|---|---|
匹配 成功次数 | 匹配 成功率/% | 匹配 成功次数 | 匹配 成功率/% | 匹配 成功次数 | 匹配 成功率/% | 匹配 成功次数 | 匹配 成功率/% | ||
| 1-花园 | 1 309 | 1 252 | 95.6 | 590 | 45.1 | 0 | 0 | 147 | 11.2 |
| 2-走廊 | 1 535 | 1 529 | 99.6 | 1 122 | 73.1 | 574 | 37.4 | 401 | 26.1 |
| 3-实验室1 | 1 815 | 1 767 | 97.4 | 1 219 | 67.2 | 75 | 4.1 | 420 | 23.1 |
| 4-办公室1 | 1 609 | 1 483 | 92.2 | 753 | 46.8 | 58 | 3.6 | 352 | 21.9 |
| 5-实验室2 | 6 435 | 6 211 | 96.5 | 3 813 | 59.3 | 146 | 2.3 | 1 200 | 18.6 |
| 6-办公室2 | 1 831 | 1 771 | 96.7 | 1 010 | 55.2 | 184 | 10.0 | 559 | 30.5 |
Fig. 19
Histogram of matching success rates in different datasets
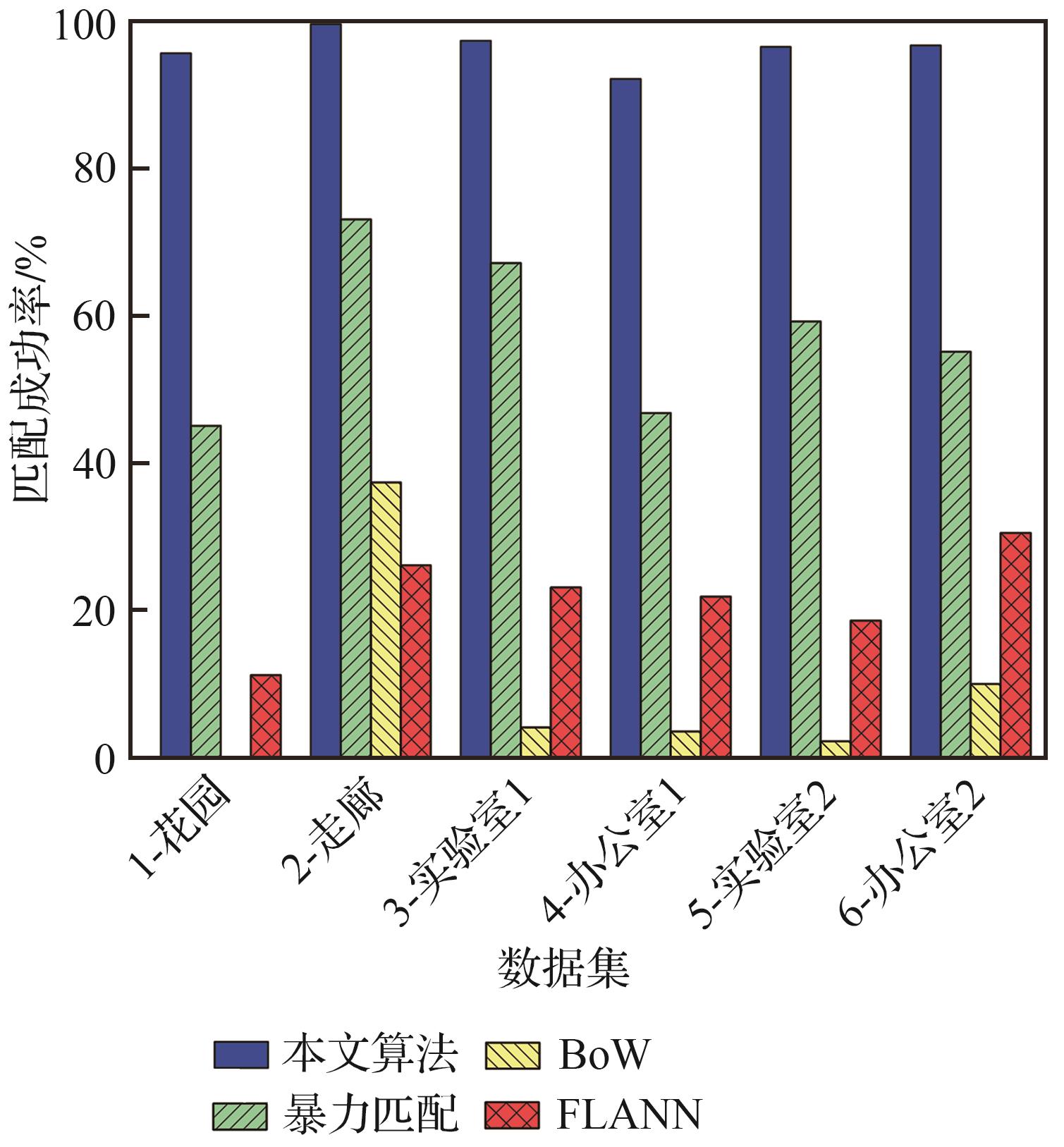
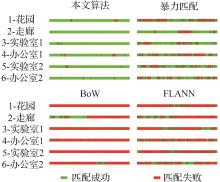
Fig. 20
Bar graph of successful matching and failed matching in different datasets
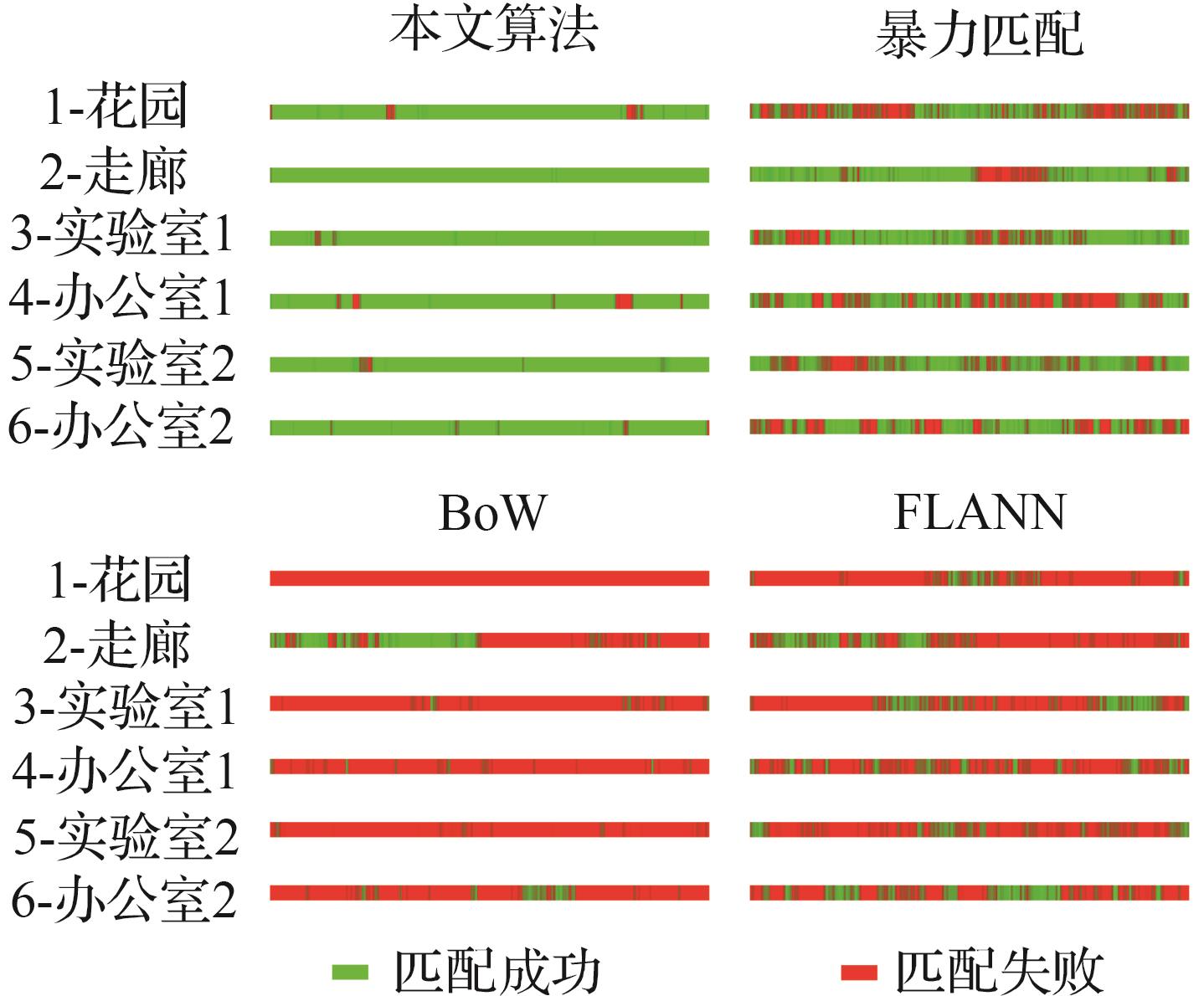
Table 2
Average matching time per frame
| 算法 | 本文算法 | 暴力匹配 | BoW | FLANN |
|---|---|---|---|---|
| 耗时/ms | 53.539 | 11.734 | 0.124 | 19.122 |

Fig. 21
Sample pictures of data sets under different indoor shooting conditions
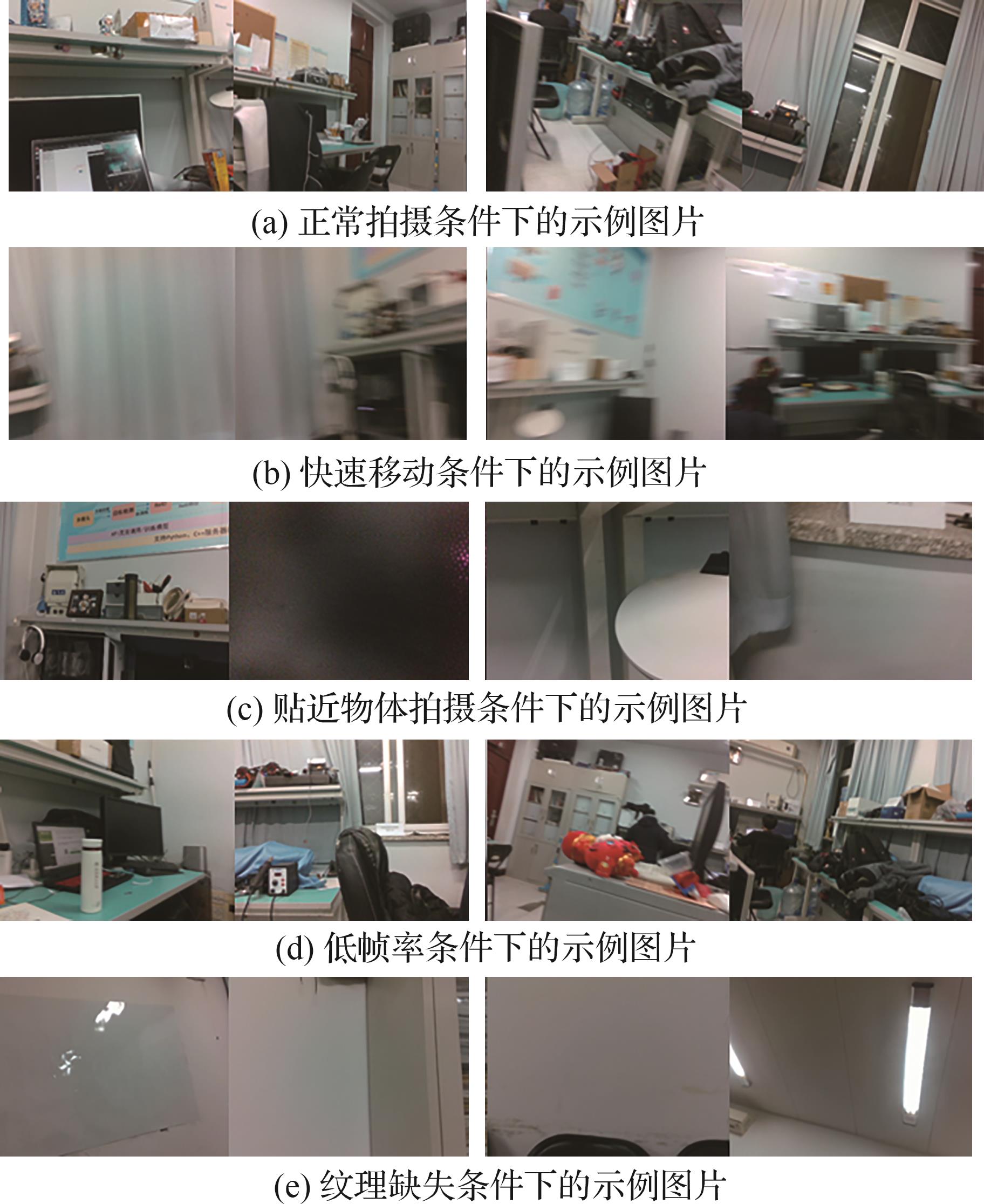
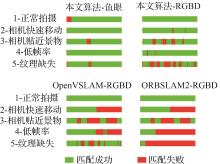
Fig. 22
Bar graph of positioning success frame and failure frame in different datasets
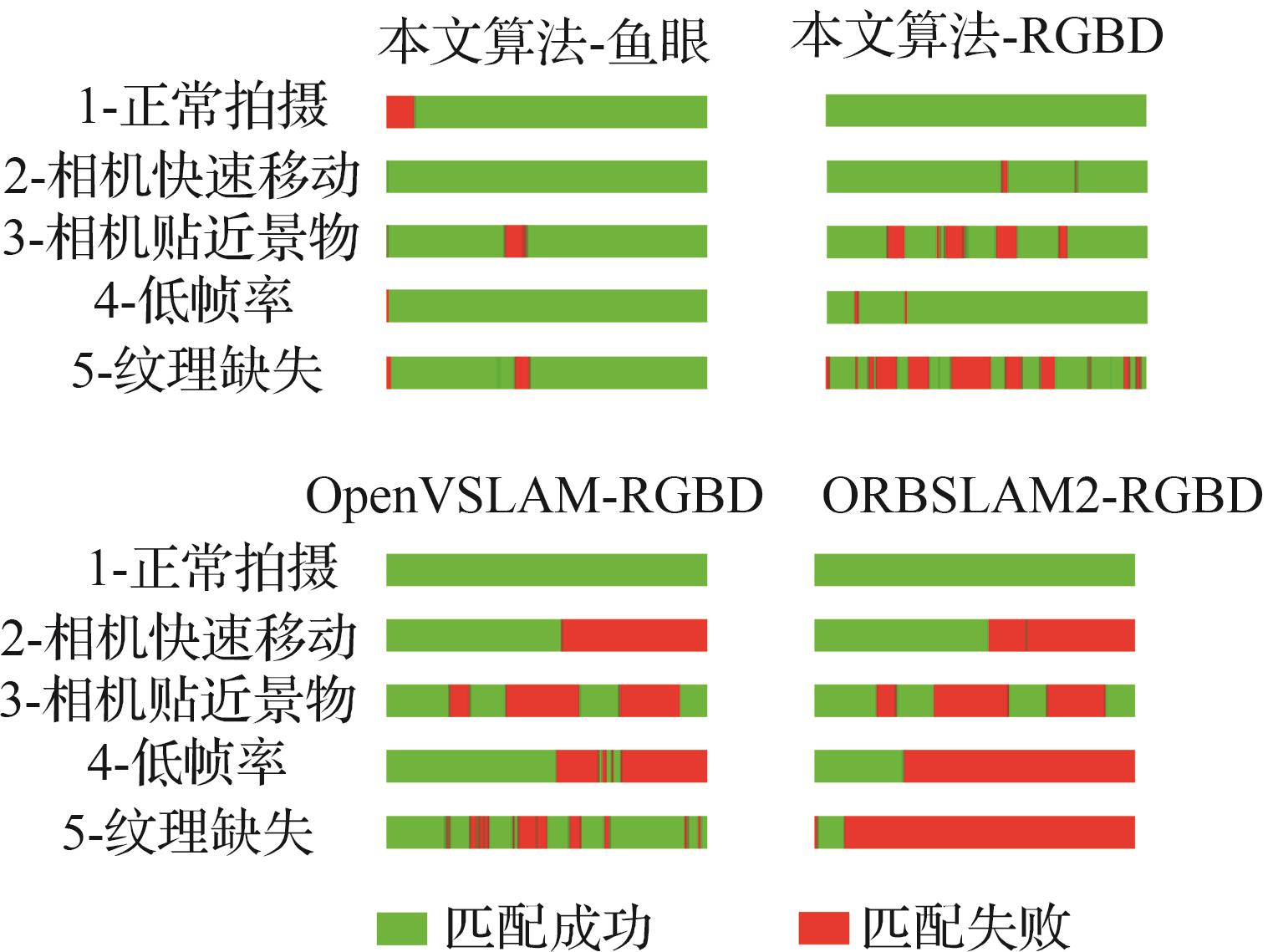

Fig. 23
Point cloud maps constructed by RGBD-SLAM channel under different conditions
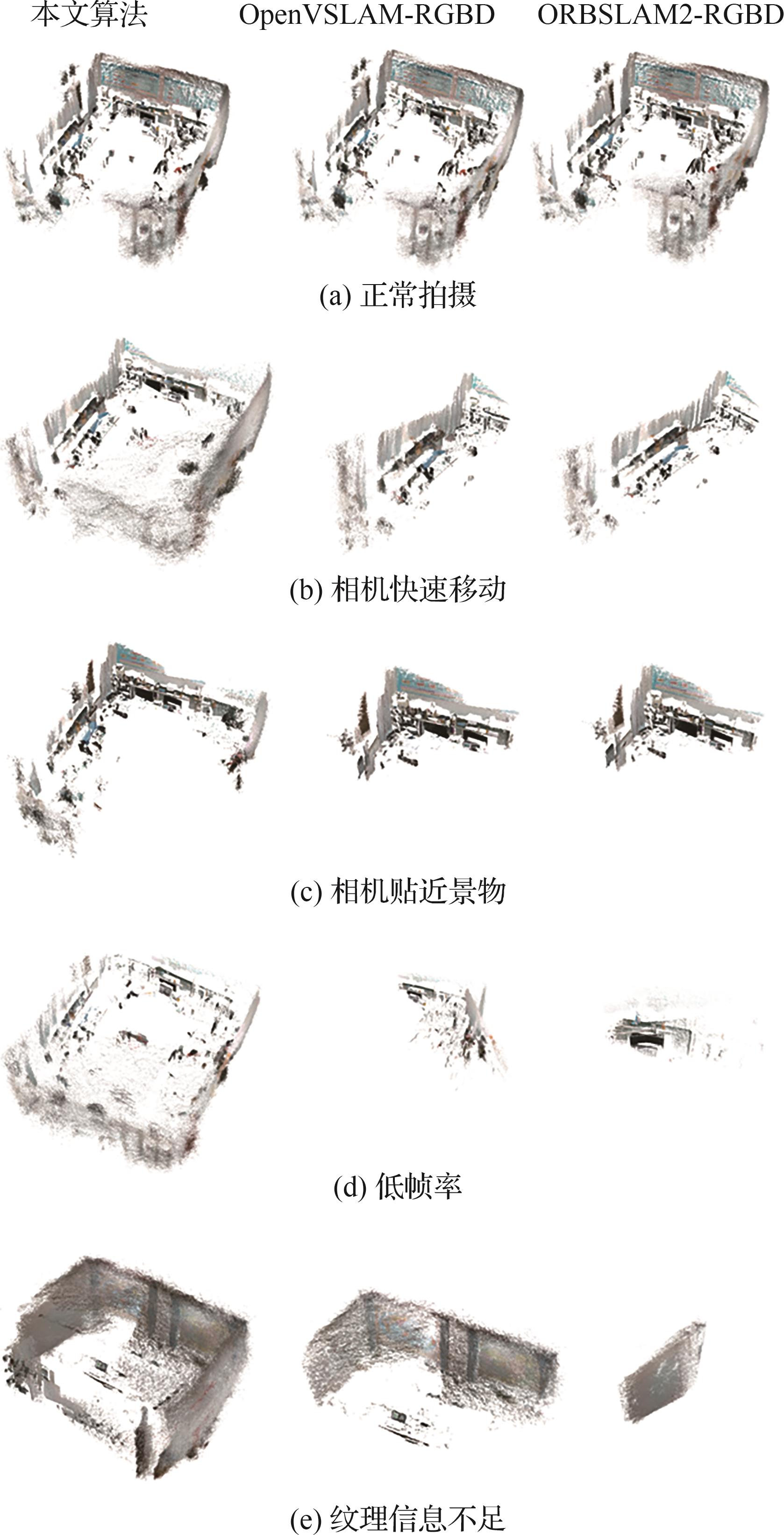
Fig. 24
Camera trajectories and point cloud maps constructed under different conditions
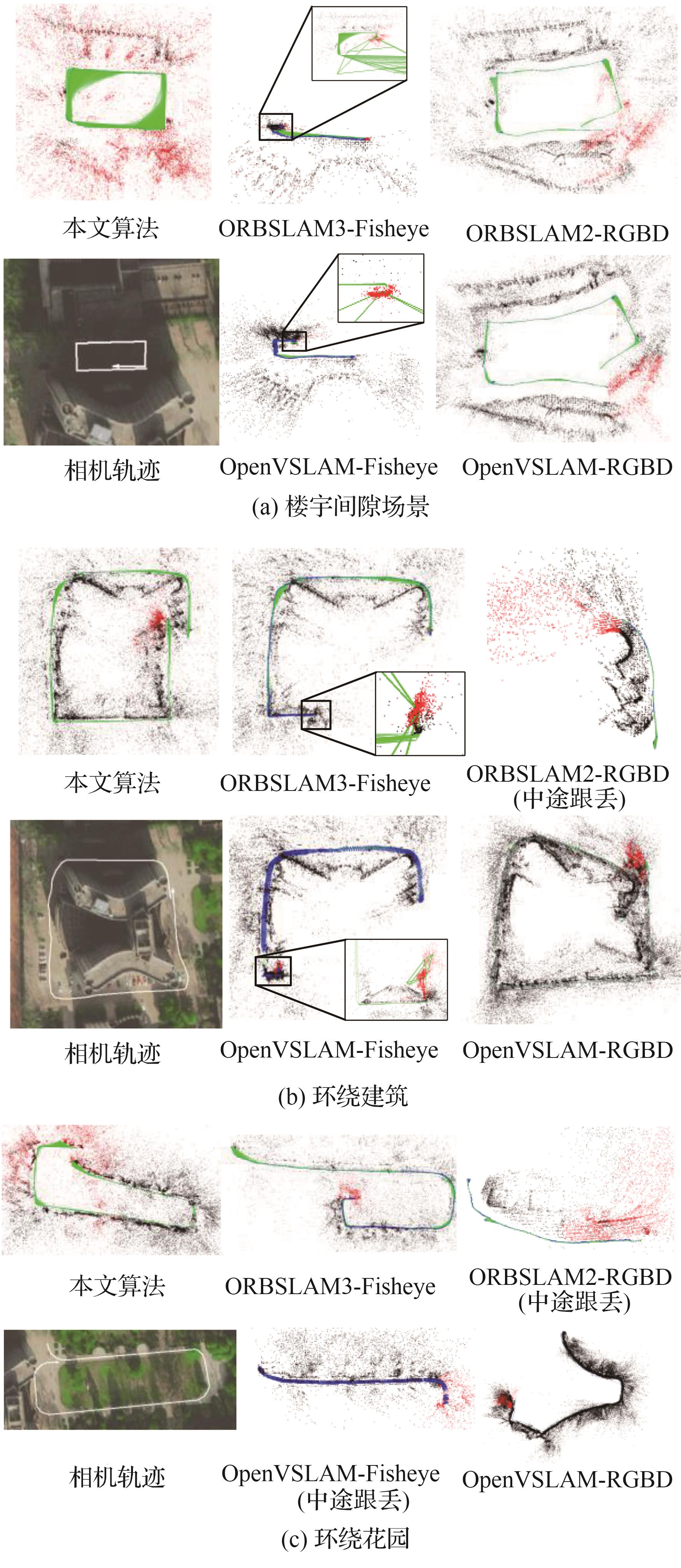

Fig. 25
Trajectory error histogram
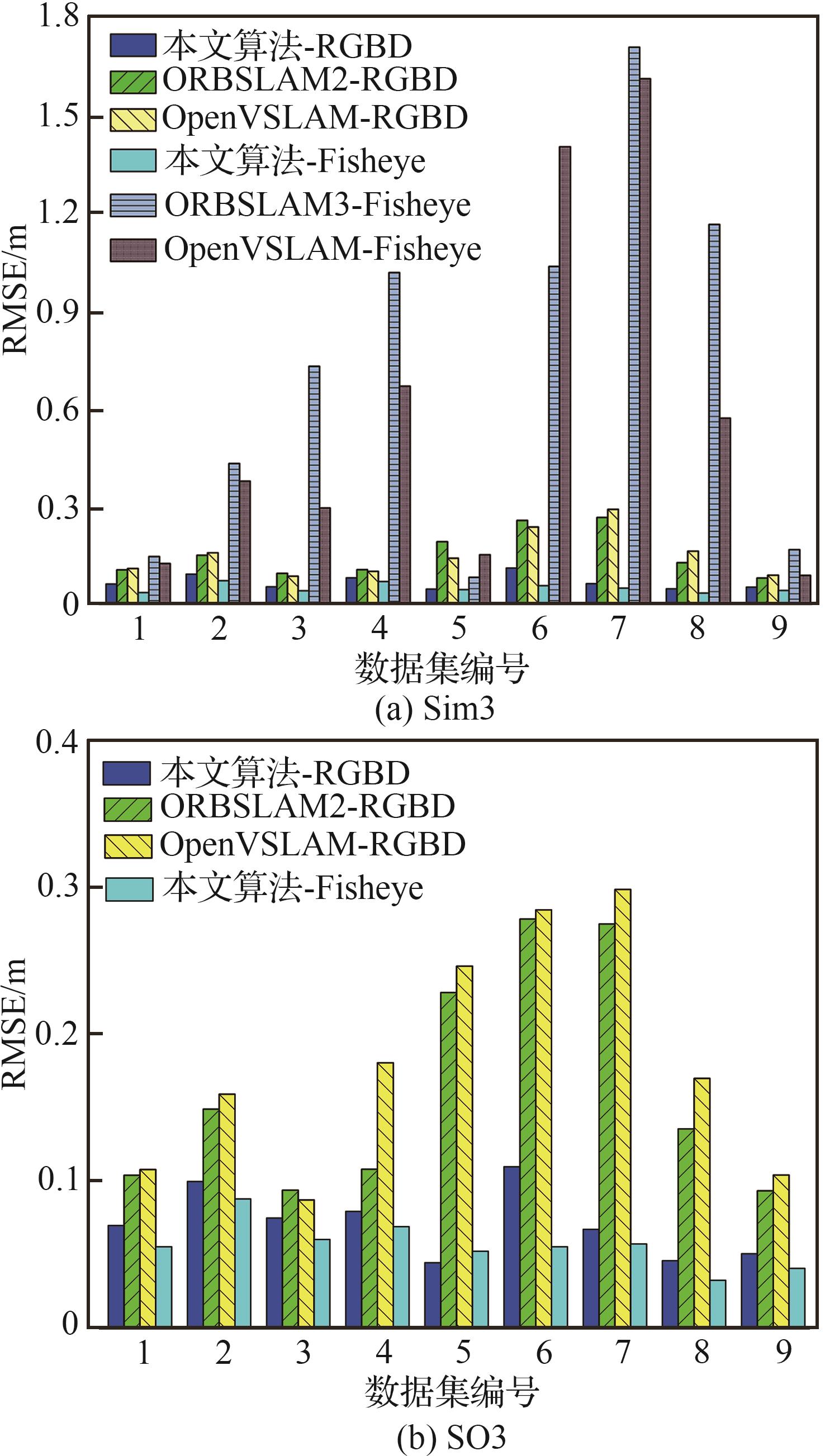
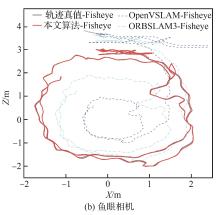
Fig. 26
Camera trajectories in Dataset 8
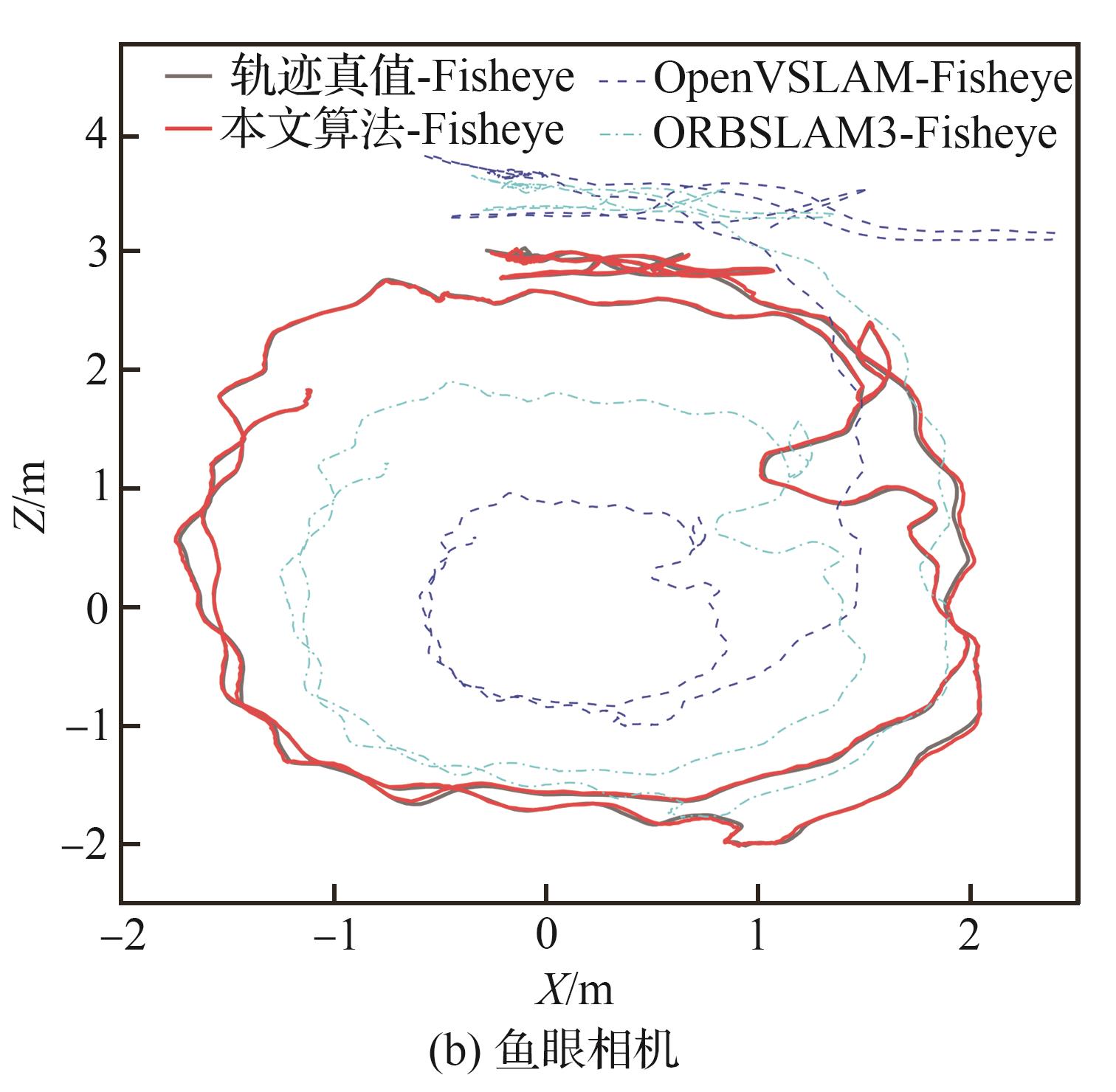
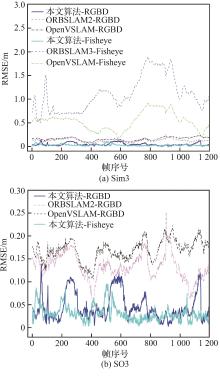
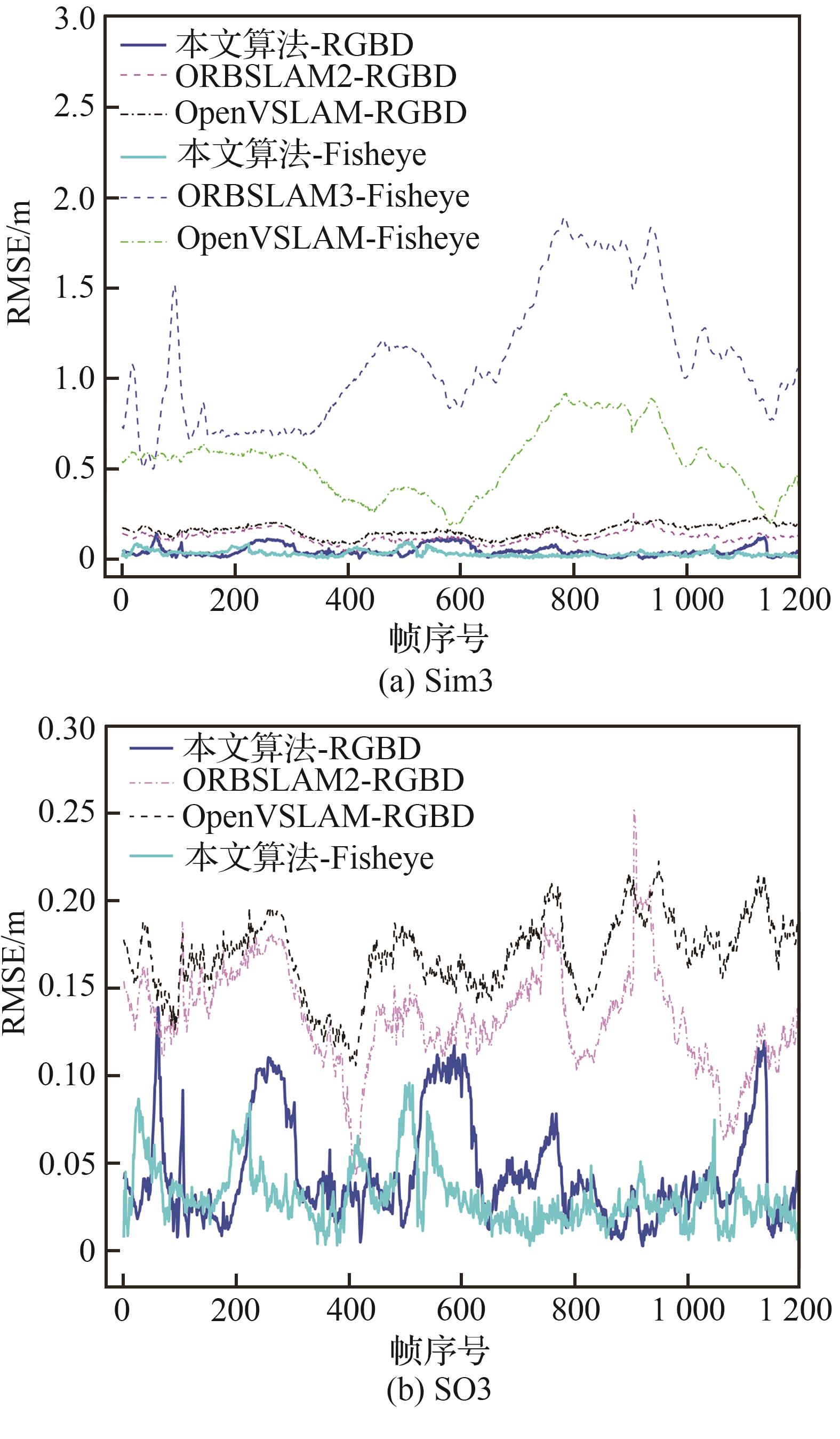
Fig. 27
Graph of trajectory errors of SLAM algorithm in Dataset 8
| 1 | 赵良玉, 金瑞, 朱叶青, 等. 基于点线特征融合的双目惯性SLAM算法[J]. 航空学报, 2022, 43(3): 325117. |
| ZHAO L Y, JIN R, ZHU Y Q, et al. Stereo visual-inertial slam with point and line features[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(3): 325117 (in Chinese). | |
| 2 | 谢洪乐, 陈卫东, 范亚娴, 等. 月面特征稀疏环境下的视觉惯性SLAM方法[J]. 航空学报, 2021, 42(1): 524169. |
| XIE H L, CHEN W D, FAN Y X, et al. Visual-inertial SLAM in featureless environments on lunar surface[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 524169 (in Chinese). | |
| 3 | 王小涛, 张家友, 王邢波, 等. 基于FastSLAM的绳系机器人同时定位与地图构建算法[J]. 航空学报, 2021, 42(1): 523893. |
| WANG X T, ZHANG J Y, WANG X B, et al. Simultaneous localization and mapping algorithm based on FastSLAM framework for tethered robots[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 523893 (in Chinese). | |
| 4 | DAVISON A J, REID I D, MOLTON N D, et al. MonoSLAM: Real-time single camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 1052-1067. |
| 5 | KLEIN G, MURRAY D. Parallel tracking and mapping for small AR workspaces[C]∥ 2007 6th IEEE and ACM International Symposium on Mixed and Augmented Reality. Piscataway: IEEE Press, 2008: 225-234. |
| 6 | KLEIN G, MURRAY D. Improving the agility of keyframe-based SLAM[C]∥European Conference on Computer Vision. Berlin: Springer, 2008: 802-815. |
| 7 | MUR-ARTAL R, MONTIEL J M M, TARDÓS J D. ORB-SLAM: A versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163. |
| 8 | LIN Y, GAO F, QIN T, et al. Autonomous aerial navigation using monocular visual-inertial fusion[J]. Journal of Field Robotics, 2018, 35(1): 23-51. |
| 9 | WANG Y H, CAI S J, LI S J, et al. CubemapSLAM: A piecewise-pinhole monocular fisheye SLAM system[C]∥Asian Conference on Computer Vision. Cham: Springer, 2019: 34-49. |
| 10 | CARUSO D, ENGEL J, CREMERS D. Large-scale direct SLAM for omnidirectional cameras[C]∥2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2015: 141-148. |
| 11 | ENGEL J, SCHÖPS T, CREMERS D. LSD-SLAM: Large-scale direct monocular SLAM[C]∥European Conference on Computer Vision. Cham: Springer, 2014: 834-849. |
| 12 | ZHANG Z C, REBECQ H, FORSTER C, et al. Benefit of large field-of-view cameras for visual odometry[C]∥ 2016 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2016: 801-808. |
| 13 | FORSTER C, PIZZOLI M, SCARAMUZZA D. SVO: Fast semi-direct monocular visual odometry[C]∥2014 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2014: 15-22. |
| 14 | MATSUKI H, VON STUMBERG L, USENKO V, et al. Omnidirectional DSO: Direct sparse odometry with fisheye cameras[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 3693-3700. |
| 15 | ENGEL J, KOLTUN V, CREMERS D. Direct sparse odometry[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(3): 611-625. |
| 16 | JO Y G, HONG S H, HWANG S S, et al. Fisheye lens camera based autonomous valet parking system[DB/OL]. arXiv preprint: 2104.13119, 2021. |
| 17 | LIU S Y, GUO P, FENG L H, et al. Accurate and robust monocular SLAM with omnidirectional cameras[J]. Sensors (Basel, Switzerland), 2019, 19(20): 4494. |
| 18 | KHOMUTENKO B, GARCIA G, MARTINET P. An enhanced unified camera model[J]. IEEE Robotics and Automation Letters, 2016, 1(1): 137-144. |
| 19 | CORREIA GARCIA T A, CAMPOS M B, CASTANHEIRO L F, et al. A proposal to integrate ORB-slam fisheye and convolutional neural networks for outdoor terrestrial mobile mapping[C]∥ 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS. Piscataway: IEEE Press, 2021: 578-581. |
| 20 | URBAN S, HINZ S. MultiCol-SLAM - A modular real-time multi-camera SLAM system[DB/OL]. arXiv preprint: 1610.07336, 2016. |
| 21 | JI S P, QIN Z J, SHAN J. Panoramic SLAM from a multiple fisheye camera rig[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 159: 169-183. |
| 22 | MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: An open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. |
| 23 | ZHANG Y, HUANG F. Panoramic visual SLAM technology for spherical images[J]. Sensors (Basel, Switzerland), 2021, 21(3): 705. |
| 24 | ZHAO Q, FENG W, WAN L, et al. SPHORB: A fast and robust binary feature on the sphere[J]. International Journal of Computer Vision, 2015, 113(2): 143-159. |
| 25 | AUDRAS C, COMPORT A I, MEILLAND M, et al. Real-time dense appearance-based SLAM for RGB-D sensors[C]∥Proceedings of the 2011 Australasian Conference on Robotics and Automation, 2011. |
| 26 | NEWCOMBE R A, IZADI S, HILLIGES O, et al. KinectFusion: Real-time dense surface mapping and tracking[C]∥ 2011 10th IEEE International Symposium on Mixed and Augmented Reality. Piscataway: IEEE Press, 2012: 127-136. |
| 27 | WHELAN T, JOHANNSSON H, KAESS M, et al. Robust real-time visual odometry for dense RGB-D mapping[C]∥ 2013 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2013: 5724-5731. |
| 28 | CHEN J W, BAUTEMBACH D, IZADI S. Scalable real-time volumetric surface reconstruction[J]. ACM Transactions on Graphics, 2013, 32(4): 1-16. |
| 29 | ENDRES F, HESS J, STURM J, et al. 3-D mapping with an RGB-D camera[J]. IEEE Transactions on Robotics, 2014, 30(1): 177-187. |
| 30 | HENRY P, KRAININ M, HERBST E, et al. RGB-D mapping: Using depth cameras for dense 3D modeling of indoor environments[M]∥Experimental Robotics. Berlin: Springer, 2014: 477-491. |
| 31 | BESL P J, MCKAY N D. Method for registration of 3-D shapes [J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 1992, 14(2):239-256. |
| 32 | LOWE D G. Object recognition from local scale-invariant features[C]∥Proceedings of the Seventh IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2002: 1150-1157. |
| 33 | SUMIKURA S, SHIBUYA M, SAKURADA K. OpenVSLAM: A versatile visual SLAM framework[C]∥Proceedings of the 27th ACM International Conference on Multimedia. New York: ACM, 2019: 2292-2295. |
| 34 | CAMPOS C, ELVIRA R, RODRÍGUEZ J J G, et al. ORB-SLAM3: An accurate open-source library for visual, visual⁃inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| 35 | YOUSIF K, TAGUCHI Y, RAMALINGAM S. MonoRGBD-SLAM: Simultaneous localization and mapping using both monocular and RGBD cameras[C]∥ 2017 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2017: 4495-4502. |
| 36 | ZHANG Y T, SONG J M, DING Y, et al. FSD-BRIEF: A distorted BRIEF descriptor for fisheye image based on spherical perspective model[J]. Sensors (Basel, Switzerland), 2021, 21(5): 1839. |
| 37 | ROSTEN E, DRUMMOND T. Machine learning for high-speed corner detection[M]∥Computer Vision⁃ECCV 2006. Berlin: Springer, 2006: 430-443. |
| 38 | MIKOLAJCZYK K, SCHMID C. A performance evaluation of local descriptors[C]∥ 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Proceedings. Piscataway: IEEE Press, 2003: 1-7. |
| 39 | URBAN S, LEITLOFF J, HINZ S. MLPnP - A real-time maximum likelihood solution to the perspective-n-point problem[DB/OL].arXiv preprint: 1607.08112, 2016. |
| [1] | . Robust SOP Positioning Algorithm Based on Tightly Coupled TDOA/AOA [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 1-0. |
| [2] | Yuan SONG, Rui LI, Zhigang HUANG. Allocation method of RTK integrity indicators [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331655-331655. |
| [3] | Lin CHEN, Xiwen GU, Zhiying CHEN, Zhuo ZHANG, Xiaoliang SUN. High-precision monocular vision pose measurement for large distance span in carrier landing guidance [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331568-331568. |
| [4] | Ligong LI, Chao ZHANG, Jingting SU. Distributed fusion technology for multi-source landing guidance information [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531461-531461. |
| [5] | Qiufu WANG, Daoming BI, Zhuo ZHANG, Xiaoliang SUN, Qifeng YU. Onboard visual-inertial relative pose and deck motion easurement for autonomous landing [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531268-531268. |
| [6] | Kun LI, Shuhui BU, Jiapeng LI, Juboxi WANG, Pengcheng HAN, Xiaohan LI, Haowei LI. UAV swarm positioning method based on monocular vision and ranging information [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531281-531281. |
| [7] | Xin XU, Liang LI, Jiaxiang LI, Jiachang JIANG, Yilin WEI. JPALS reference receivers topology design for ionospheric gradient monitoring [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331075-331075. |
| [8] | Qiushi CHEN, Jinglong GAO, Meng WANG, Wenkun BIAN, Haojun HAN. Overview of anti-interference technology of unmanned aerial vehicle satellite navigation system [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331797-331797. |
| [9] | . Investigation on Aero-Optical Effect Regulation of Supersonic Vehicles Based on Variable-Slope Ramp-VG Arrays [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 1-0. |
| [10] | Chenhao ZHAO, Dewei WU, Jing HE, Qian WU. A semantic feature matching algorithm for UAV visual pose estimation [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(2): 330406-330406. |
| [11] | Qiufu WANG, Zhiguo SHI, Zhuo ZHANG, Xiaoliang SUN, Qifeng YU. Robust monocular relative pose measurement for carrier-based aircraft landing guidance [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(23): 330309-330309. |
| [12] | Yixuan YOU, Xinchun JI, Dongyan WEI, Yi LU, Hong YUAN. Criterion MP-S for multi-scale cascaded geomagnetic matching similarity measurement [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(21): 330149-330149. |
| [13] | Lunlong ZHONG, Wenjing YUE, Xueyan LI. Spoofing interference detection algorithm based on EWMA control chart and robust estimation [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 329655-329655. |
| [14] | Kun LI, Shuhui BU, Xuan JIA, Yifei DONG, Lin CHEN. Relative aircraft positioning based on inertial navigation and datalink [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 329594-329594. |
| [15] | Wei ZHANG, Ruojun HE. Autonomous trajectory design for IoT data collection by UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(8): 329054-329054-1. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341