ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (9): 327224.doi: 10.7527/S1000-6893.2022.27224
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Xu ZHAO1, Guoyuan QI1( ), Xinchen YU2, Jianbing HU2, Xia LI2
), Xinchen YU2, Jianbing HU2, Xia LI2
Received:2022-03-31
Revised:2022-04-14
Accepted:2022-05-30
Online:2022-06-13
Published:2022-06-08
Contact:
Guoyuan QI
E-mail:guoyuanqisa@qq.com
Supported by:CLC Number:
Xu ZHAO, Guoyuan QI, Xinchen YU, Jianbing HU, Xia LI. Compensation function observer and its application in flight vehicle attitude control[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327224.
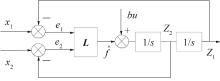
Fig. 1
Luenberger observer
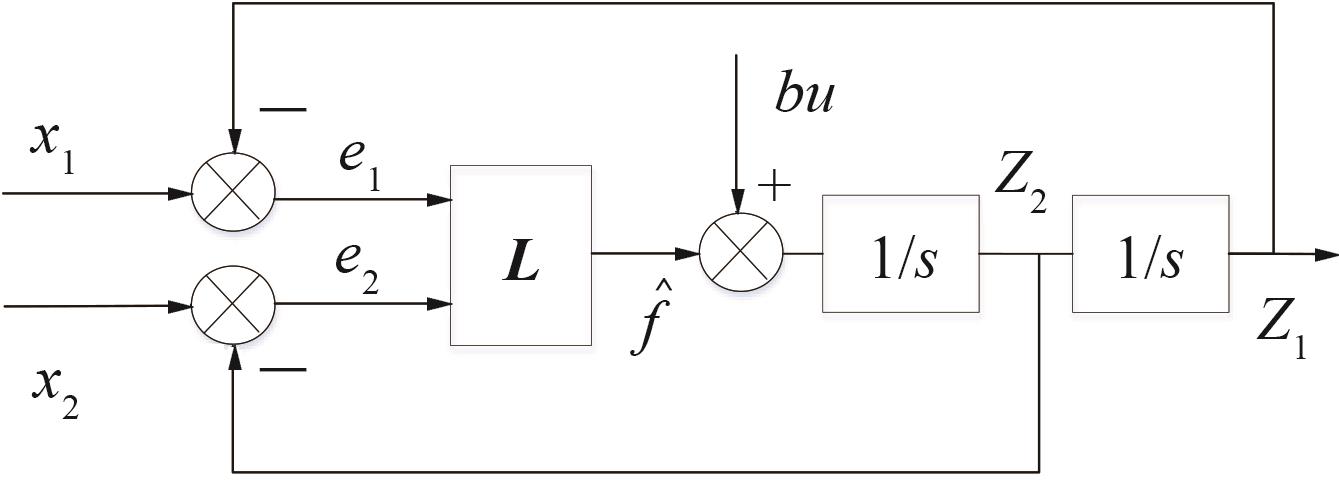
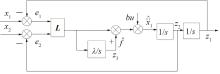
Fig. 2
Compensation function observer
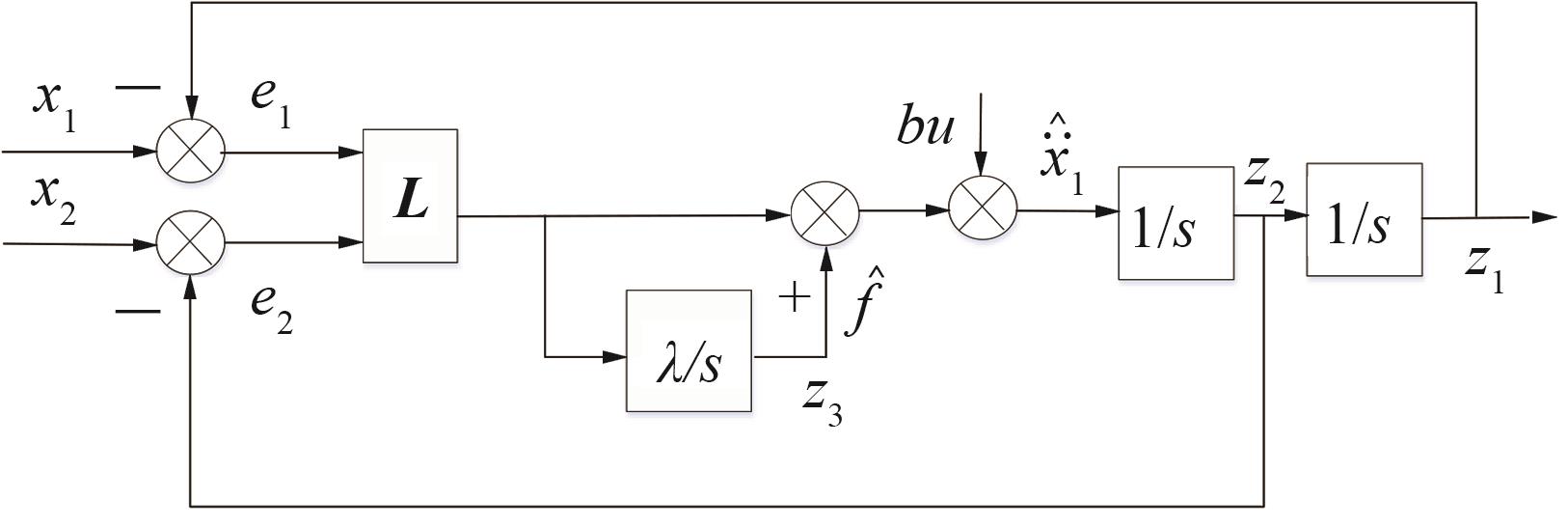
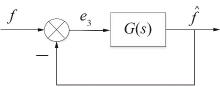
Fig. 3
Transformation of observer to tracker
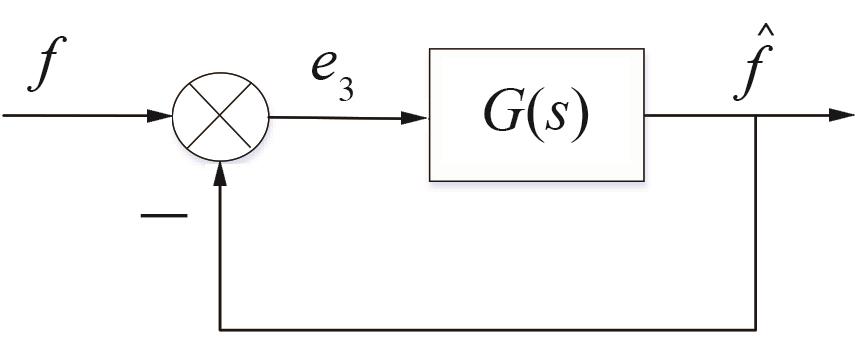
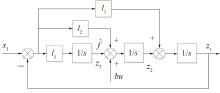
Fig. 4
Schematic diagram of ESO

Fig. 5
Compensated function observer with RBF neural network
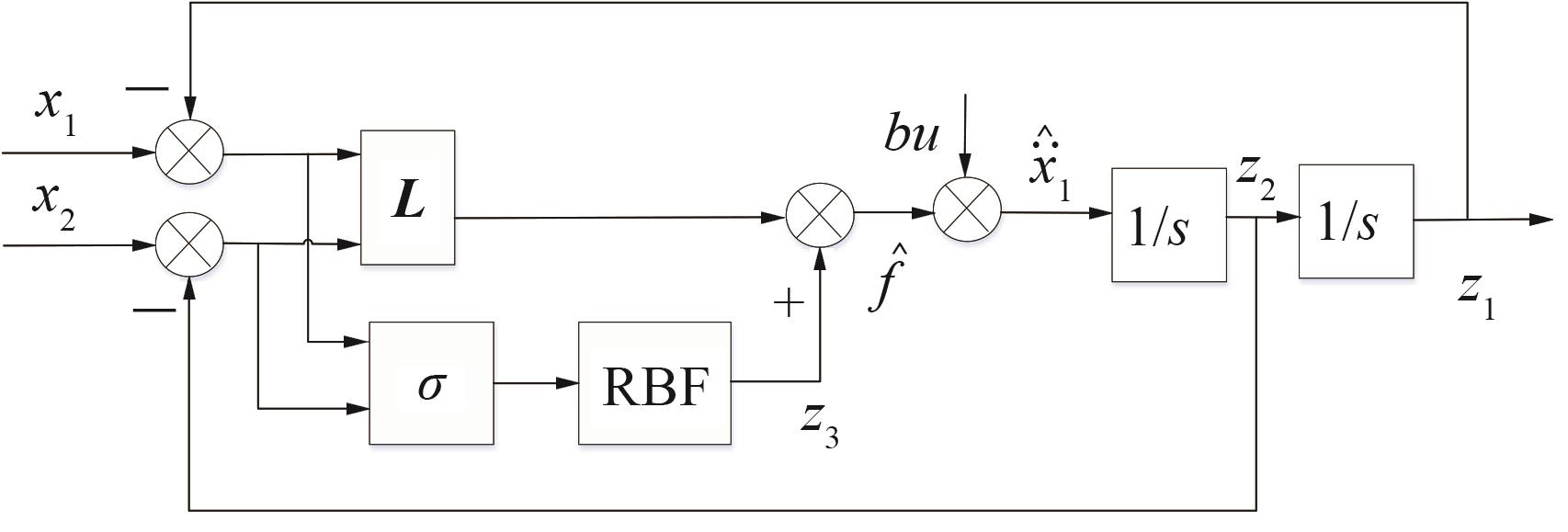
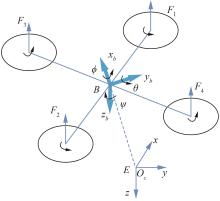
Fig. 6
Four-rotor flight vehicle
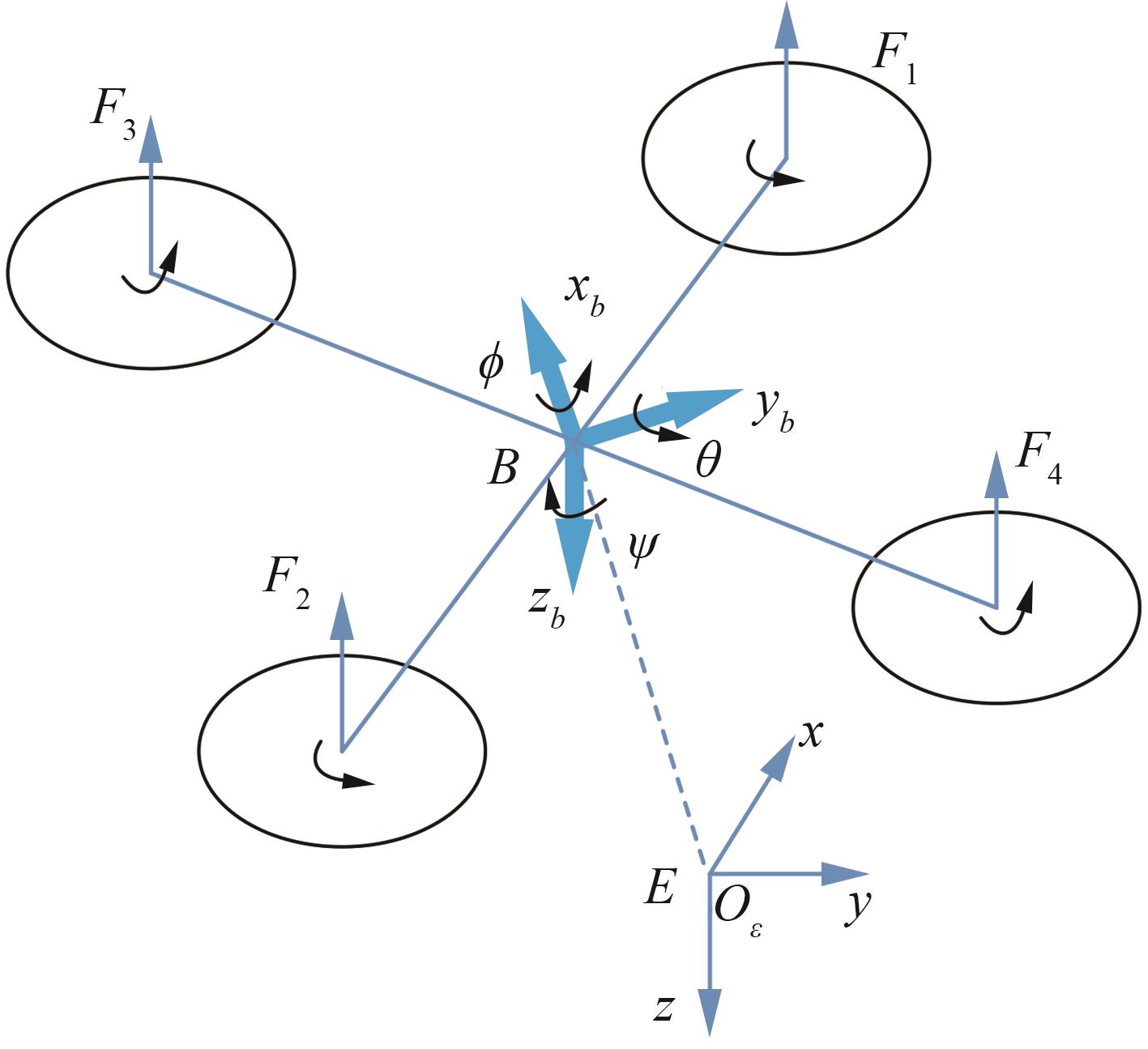
Table 1
DJI F450 physical parameters and values
| 符号 | 物理意义 | 数值 |
|---|---|---|
| 四旋翼质量 | 1.4 | |
| 四旋翼半轴距 | 0.225 | |
| 升力系数 | ||
| 反扭力矩系数 | ||
| 0.021 1 | ||
| 0.021 9 | ||
| 0.036 6 | ||
| 重力加速度 | 9.8 |
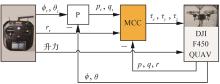
Fig. 7
Control structure of quadrotor flight vehicle system
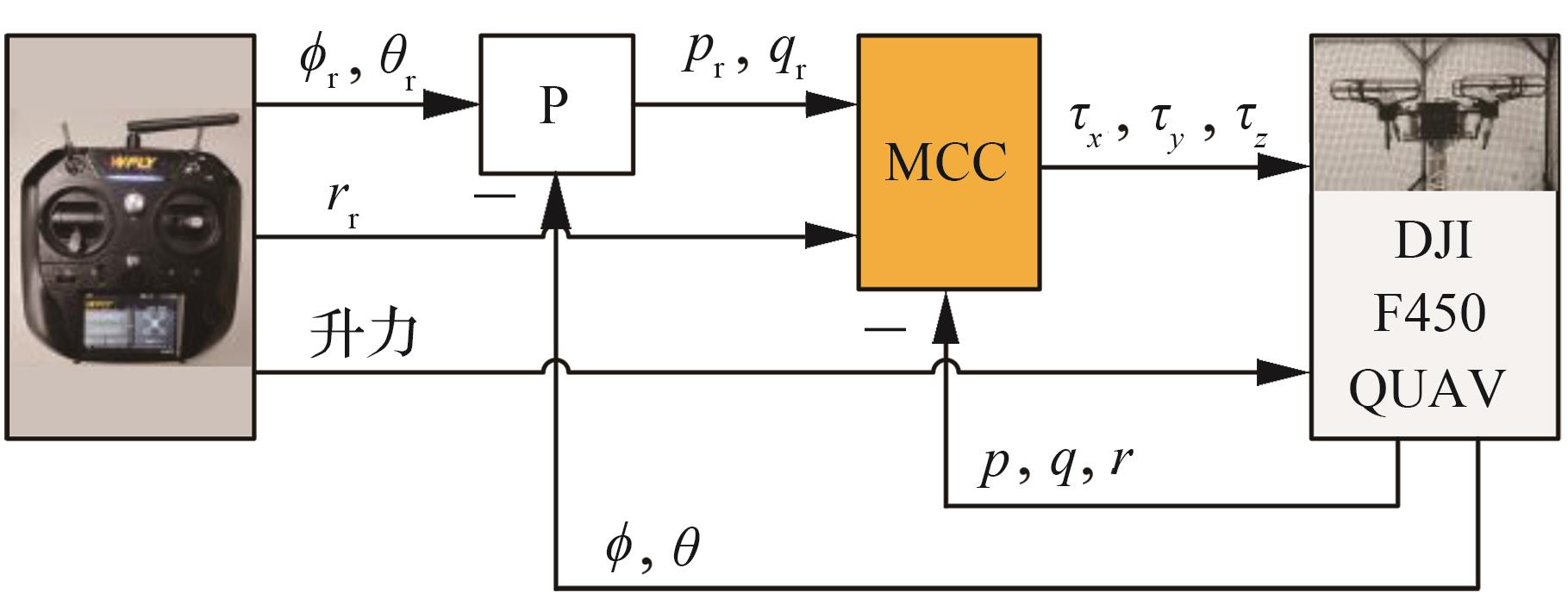
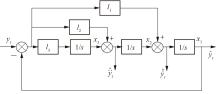
Fig. 8
HOD structure
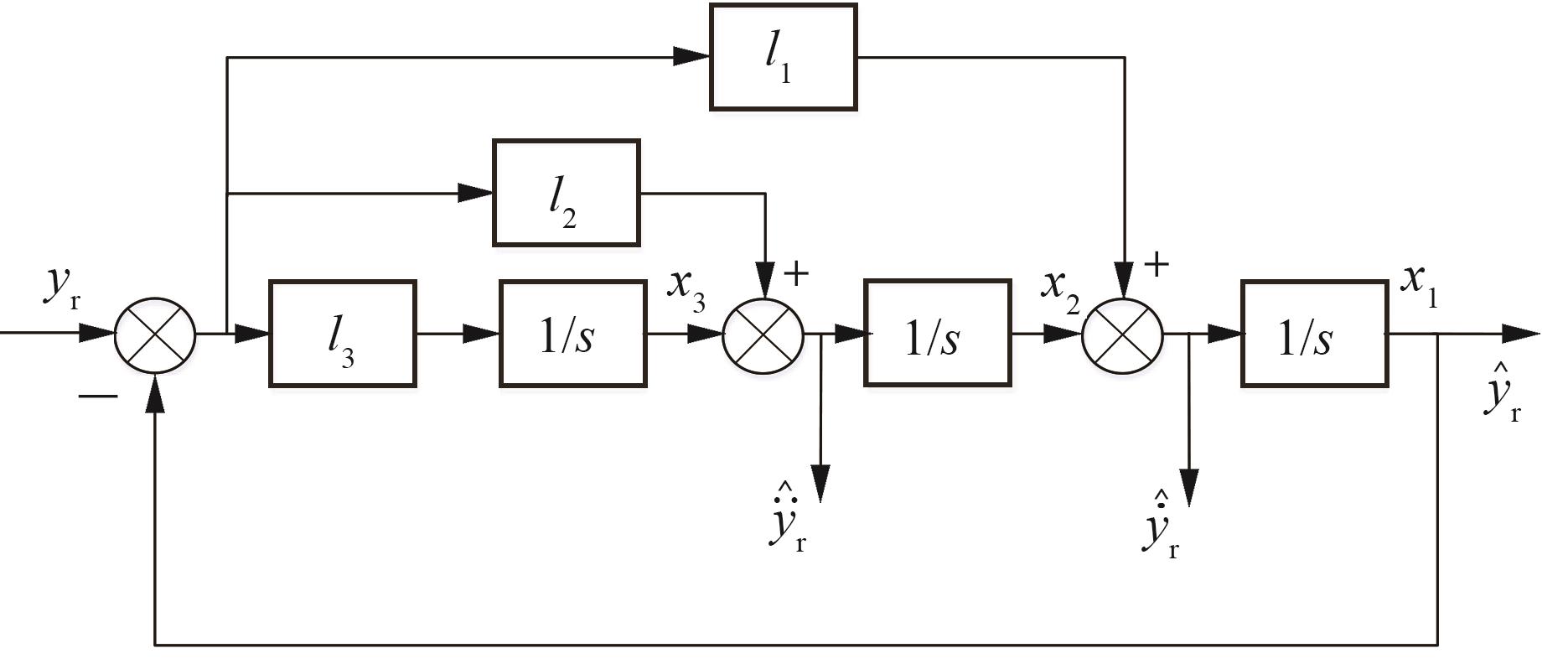

Fig. 9
Estimation of ESO and R-CFO on different functions
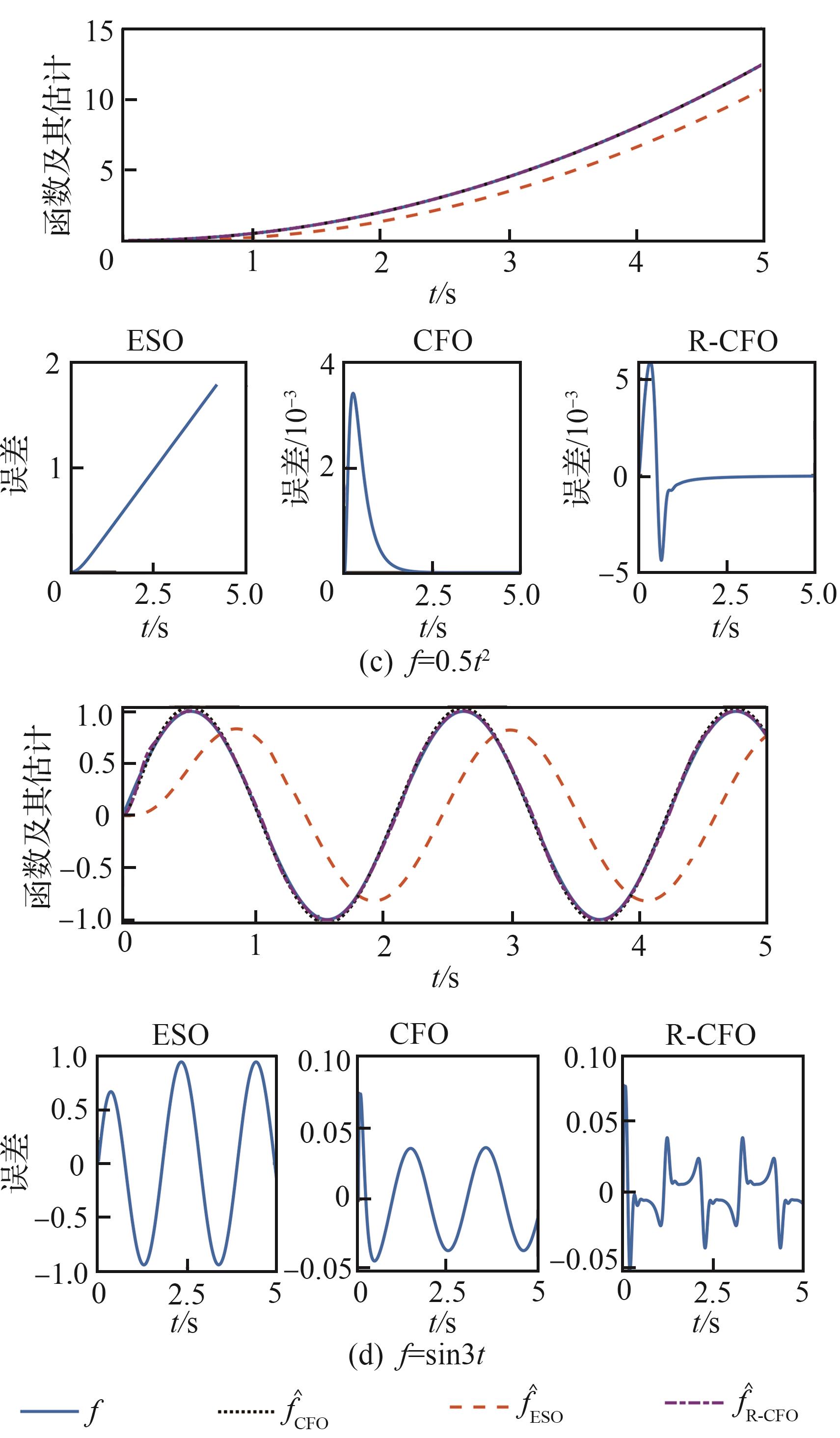

Fig. 10
Comparison of ESO, CFO and R-CFO on Duffing model function estimation performance

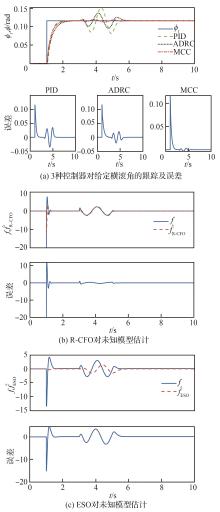
Fig. 11
Comparison of roll channel control and estimation
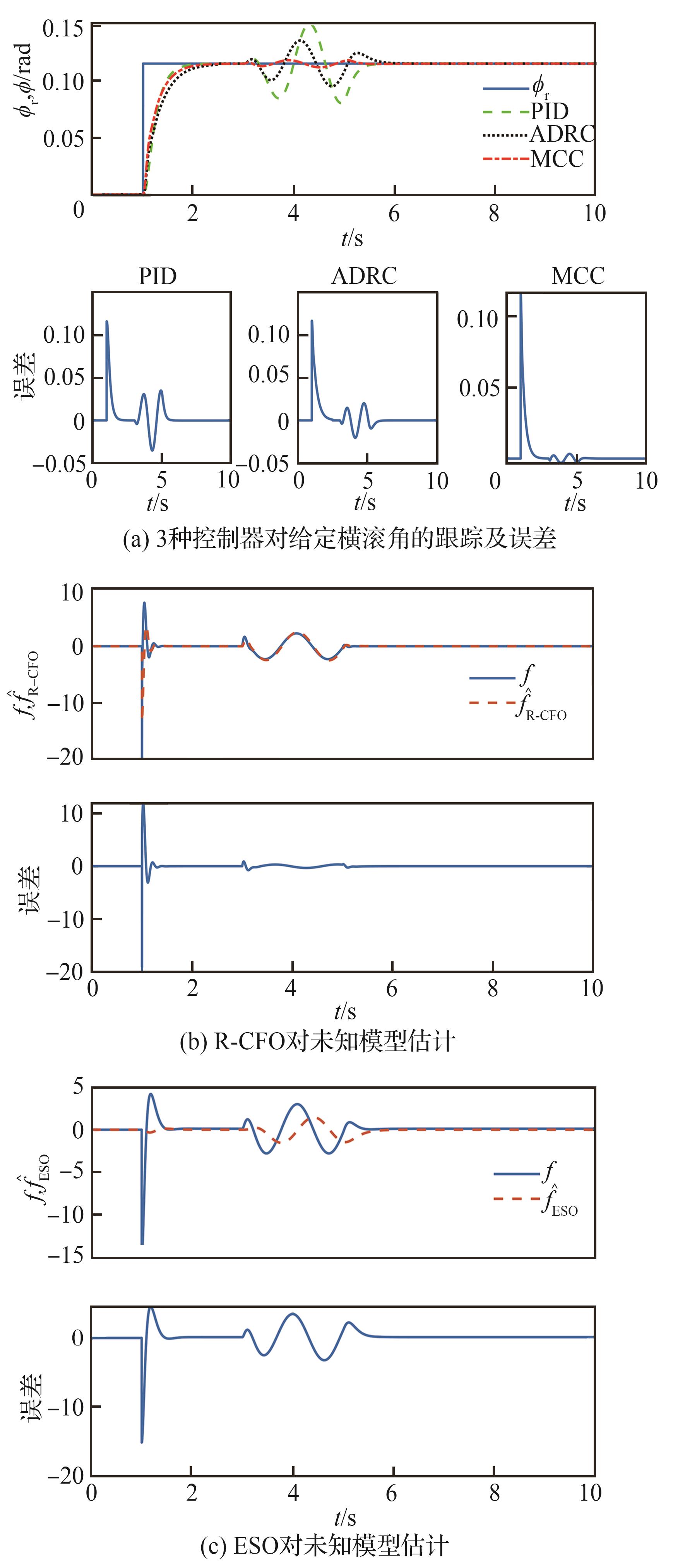
Table 2
Inner loop controller parameters
| 观测器和控制器参数 | 数值仿真 | 实验数据 | |
|---|---|---|---|
| PID | 0.1 | ||
| 0.001 | |||
| 0.02 | |||
| 基于ESO的ADRC | 8 | 8 | |
| 46 | 46 | ||
| 10 | 10 | ||
带有RBF神经网络 的CFO的MCC | |||
| 0.3 | 0.3 | ||
| 46 | 46 | ||
| 8 | 8 | ||
Table 3
Comparison of roll angle system control and unknown model estimation
| 控制器 | 扰动时的平均绝对误差/rad | 函数项估计的 平均误差 |
|---|---|---|
| MCC | 0.001 7 | 0.240 4 |
| ADRC | 0.010 8 | 1.808 8 |
| PID | 0.018 5 |

Fig. 12
Four-rotor algorithm development platform based on Pixhawk
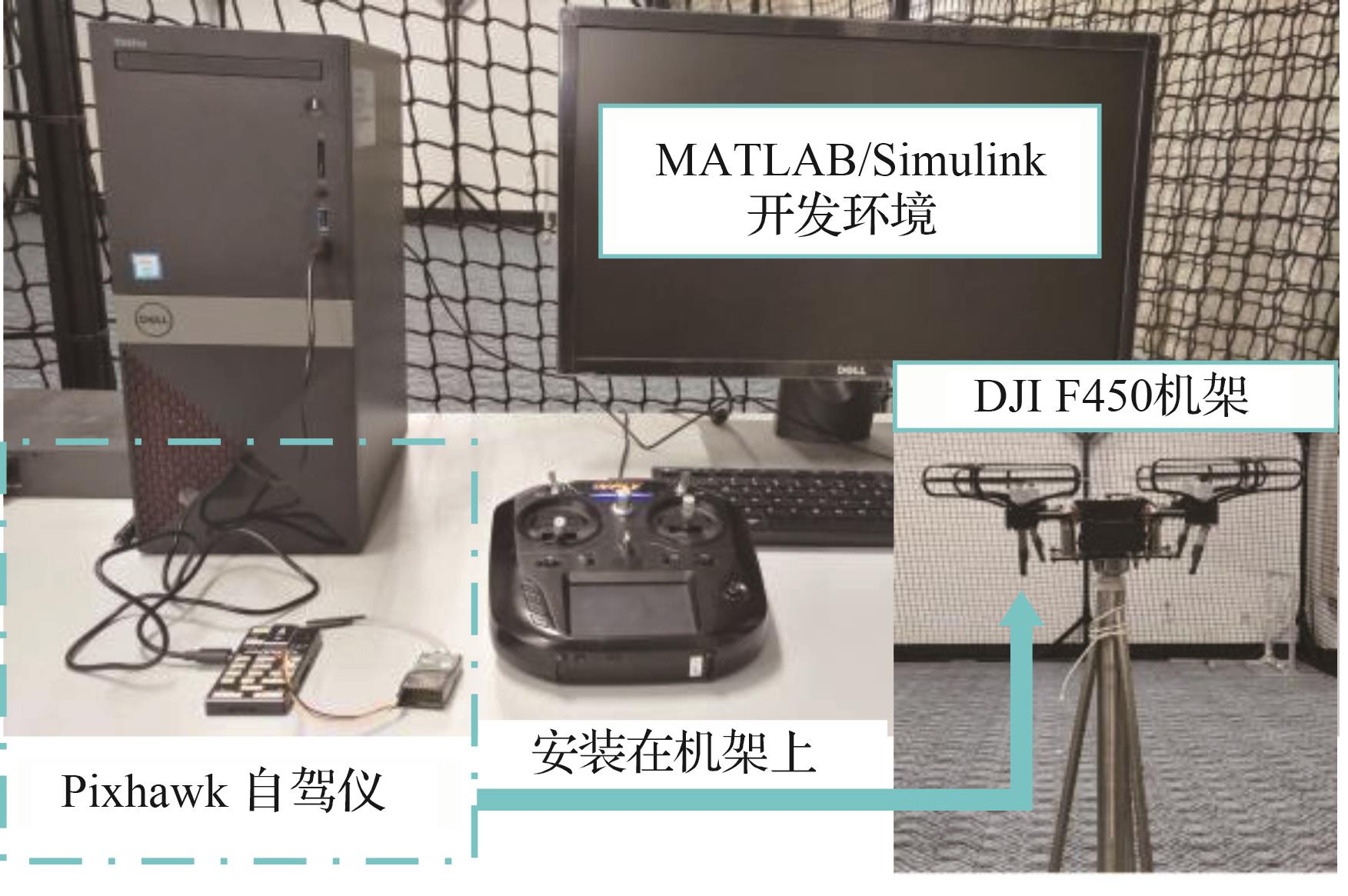
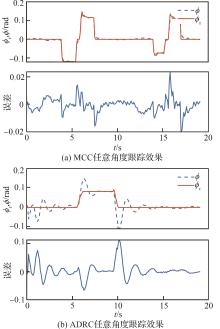
Fig. 13
Comparison of tracking effects of two control algorithms for roll angle
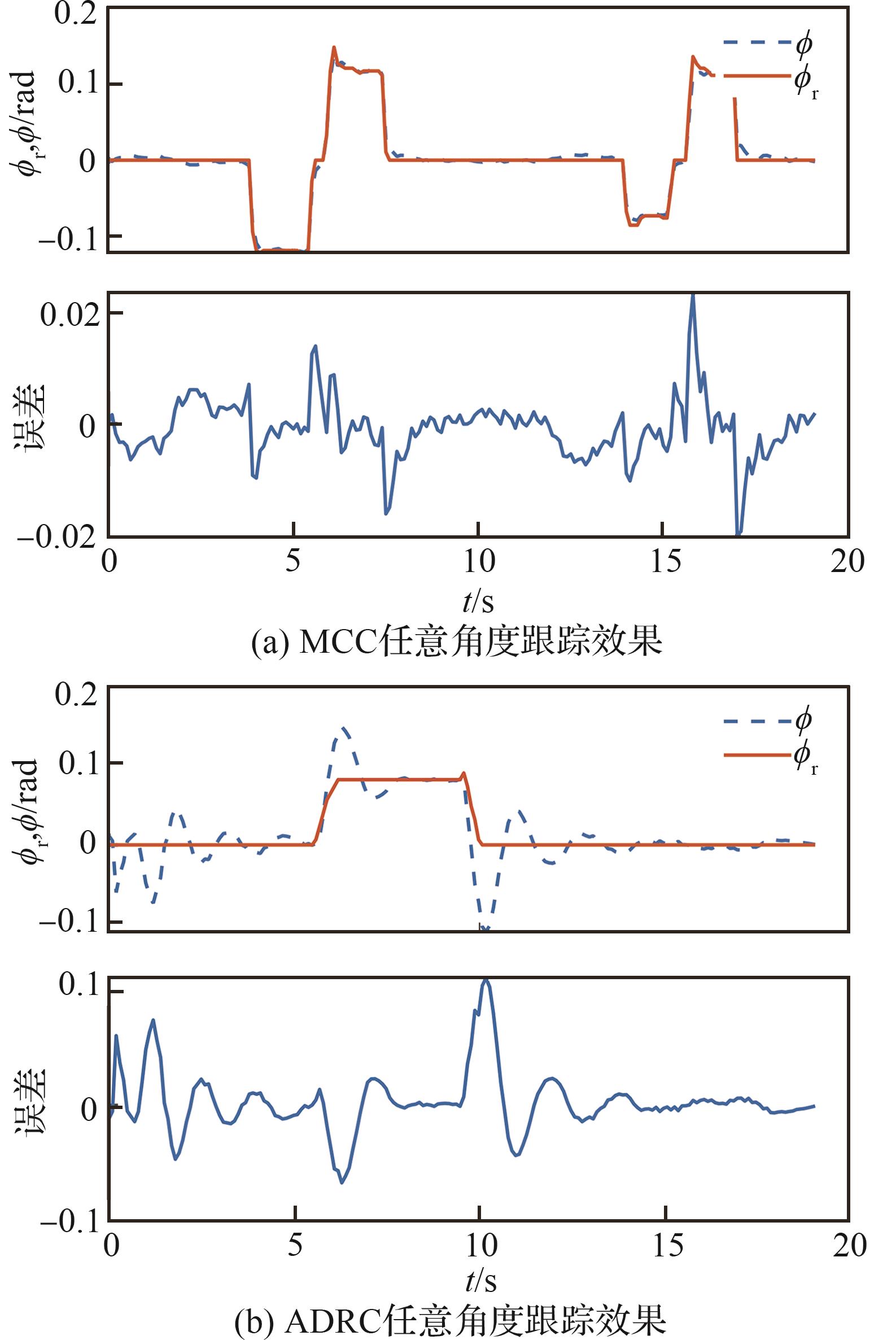
Table 4
MCC and ADRC control performance comparison
| 控制器 | 调节时间/s | 超调量 | 平均绝对误差/rad |
|---|---|---|---|
| MCC | 0.4 | 0.004 1 | |
| ADRC | 1.5 | 0.58 | 0.014 4 |
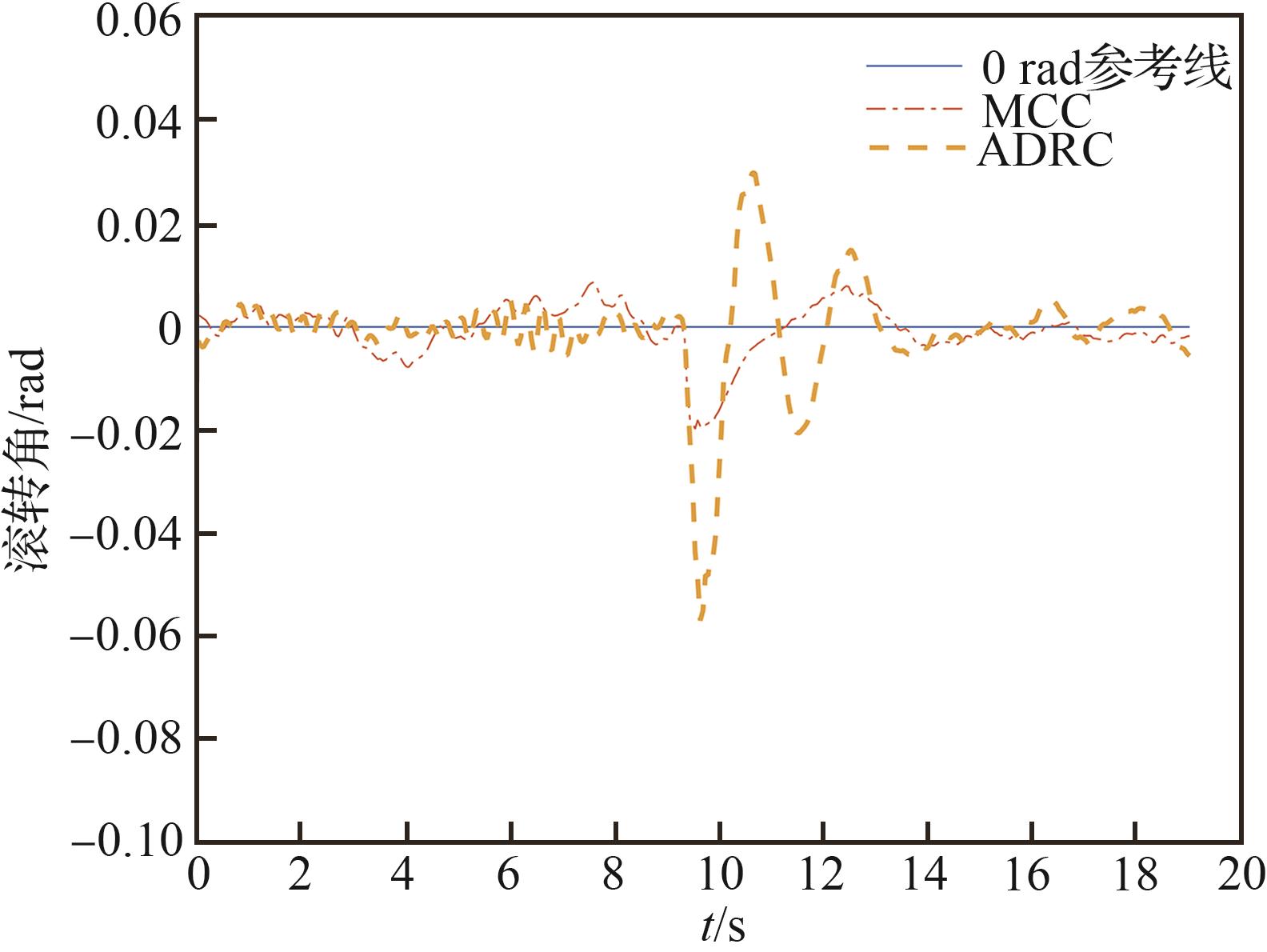
Fig. 14
Comparison of disturbance rejection of two control algorithms for roll angle
| 1 | L'AFFLITTO A, ANDERSON R B, MOHAMMADI K. An introduction to nonlinear robust control for unmanned quadrotor aircraft: How to design control algorithms for quadrotors using sliding mode control and adaptive control techniques focus on education[J]. IEEE Control Systems Magazine, 2018, 38(3): 102-121. |
| 2 | ZHANG Y, CHEN Z Q, ZHANG X H, et al. A novel control scheme for quadrotor UAV based upon active disturbance rejection control[J]. Aerospace Science and Technology, 2018, 79: 601-609. |
| 3 | ZHAO B, XIAN B, ZHANG Y, et al. Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology[J]. IEEE Transactions on Industrial Electronics, 2015, 62(5): 2891-2902. |
| 4 | BI H Y, QI G Y, HU J B. Modeling and analysis of chaos and bifurcations for the attitude system of a quadrotor unmanned aerial vehicle[J]. Complexity, 2019,2019(3):1-16. |
| 5 | BI H Y, QI G Y, HU J B, et al. Hidden and transient chaotic attractors in the attitude system of quadrotor unmanned aerial vehicle[J]. Chaos, Solitons & Fractals, 2020, 138: 109815. |
| 6 | BOUZID Y, SIGUERDIDJANE H, BESTAOUI Y. Energy based 3D trajectory tracking control of quadrotors with model-free based on-line disturbance compensation[J]. Chinese Journal of Aeronautics, 2018, 31(7): 1568-1578. |
| 7 | QI G Y, CHEN Z Q, YUAN Z Z. Model-free control of affine chaotic systems[J]. Physics Letters A, 2005, 344(2-4): 189-202. |
| 8 | SALIH A L, MOGHAVVEMI M, MOHAMED H A F, et al. Flight PID controller design for a UAV quadrotor[J]. Scientific Research and Essays, 2010, 5(23): 3660-3667. |
| 9 | 高应杰, 陈鼎新, 李荣明. 小型四旋翼无人飞行器控制算法研究[J]. 计算机与现代化, 2011(10): 4-7. |
| GAO Y J, CHEN D X, LI R M. Research on control algorithm of microquadrotor aircraft[J]. Computer and Modernization, 2011(10): 4-7 (in Chinese). | |
| 10 | SANGYAM T, LAOHAPIENGSAK P, CHONGCHAROEN W, et al. Path tracking of UAV using self-tuning PID controller based on fuzzy logic[C]∥Proceedings of SICE Annual Conference. Piscataway: IEEE Press, 2010: 1265-1269. |
| 11 | EFE M Ö. Neural network assisted computationally simple P I λ D μ control of a quadrotor UAV[J]. IEEE Transactions on Industrial Informatics, 2011, 7(2): 354-361. |
| 12 | 陈增强, 程赟, 孙明玮, 等. 线性自抗扰控制理论及工程应用的若干进展[J]. 信息与控制, 2017, 46(3): 257-266. |
| CHEN Z Q, CHENG Y, SUN M W, et al. Surveys on theory and engineering applications for linear active disturbance rejection control[J]. Information and Control, 2017, 46(3): 257-266 (in Chinese). | |
| 13 | HAN J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906. |
| 14 | DONG W, GU G Y, ZHU X Y, et al. High-performance trajectory tracking control of a quadrotor with disturbance observer[J]. Sensors and Actuators A: Physical, 2014, 211: 67-77. |
| 15 | LOTUFO M A, COLANGELO L, PEREZ-MONTENEGRO C, et al. UAV quadrotor attitude control: An ADRC-EMC combined approach[J]. Control Engineering Practice, 2019, 84: 13-22. |
| 16 | 李霞, 陈奕梅. 四旋翼飞行器降阶自抗扰控制[J]. 电光与控制, 2019, 26(10): 43-48, 72. |
| LI X, CHEN Y M. Reduced-order active disturbance rejection control for quad-rotor aircraft[J]. Electronics Optics & Control, 2019, 26(10): 43-48, 72 (in Chinese). | |
| 17 | ZHAO Z L, GUO B Z. On convergence of nonlinear active disturbance rejection control for SISO nonlinear systems[J]. Journal of Dynamical and Control Systems, 2016, 22(2): 385-412. |
| 18 | GAO Z Q. Scaling and bandwidth-parameterization based controller tuning[C]∥ Proceedings of the 2003 American Control Conference. Piscataway: IEEE Press, 2003: 4989-4996. |
| 19 | 高志强. 自抗扰控制思想探究[J]. 控制理论与应用, 2013, 30(12): 1498-1510. |
| GAO Z Q. On the foundation of active disturbance rejection control[J]. Control Theory & Applications, 2013, 30(12): 1498-1510 (in Chinese). | |
| 20 | YANG H J, CHENG L, XIA Y Q, et al. Active disturbance rejection attitude control for a dual closed-loop quadrotor under gust wind[J]. IEEE Transactions on Control Systems Technology, 2018, 26(4): 1400-1405. |
| 21 | QI G, LI X, CHEN Z Q. Problems of extended state observer and proposal of compensation function observer for unknown model and application in UAV[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 52: 2899-2910. |
| 22 | 齐国元, 陈增强, 袁著祉. 非线性系统高阶微分反馈控制[J]. 中国工程科学, 2003, 5(8): 35-44, 63. |
| QI G Y, CHEN Z Q, YUAN Z Z. High order differential feedback control for nonlinear systems[J]. Engineering Science, 2003, 5(8): 35-44, 63 (in Chinese). | |
| 23 | ZHU Y K, GUO L, QIAO J Z, et al. An enhanced anti-disturbance attitude control law for flexible spacecrafts subject to multiple disturbances[J]. Control Engineering Practice, 2019, 84: 274-283. |
| 24 | GUO B Z, ZHAO Z L. On the convergence of an extended state observer for nonlinear systems with uncertainty[J]. Systems & Control Letters, 2011, 60(6): 420-430. |
| 25 | BAI W Y, CHEN S, HUANG Y, et al. Observers and observability for uncertain nonlinear systems: A necessary and sufficient condition[J]. International Journal of Robust and Nonlinear Control, 2019, 29: 2960-2977. |
| 26 | 刘金琨. RBF神经网络自适应控制及MATLAB仿真[M]. 2版. 北京: 清华大学出版社, 2018:112-113. |
| LIU J K. RBF neural network control for mechanical systems: Design, analysis and MATLAB simulation[M]. 2nd ed. Beijing: Tsinghua University Press, 2018:112-113. (in Chinese). | |
| 27 | 全权. 多旋翼飞行器设计与控制[M]. 杜光勋, 赵峙尧, 戴训华, 等译. 北京: 电子工业出版社, 2018:205-230. |
| QUAN Q. Design and control of multi-rotor aircraft[M]. DU G X, ZHAO Z R, DAI X H, et al. translated. Beijing: Publishing House of Electronics Industry, 2018:205-230 (in Chinese). | |
| 28 | 赵国荣, 何云风, 韩旭, 等. 采用混合线性设计的四旋翼块对角姿态控制器[J]. 飞行力学, 2021, 39(3): 34-40. |
| ZHAO G R, HE Y F, HAN X, et al. Quad-rotor UAV block diagonal attitude controller with mixed linear design[J]. Flight Dynamics, 2021, 39(3): 34-40 (in Chinese). |
| [1] | Yufeng BAI, Qitong ZOU, Rui HUANG, Haojie LIU, Yuguo RAN. Aeroelastic control of flexible wing with flying-wing configuration and wind tunnel tests [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(14): 331452-331452. |
| [2] | Ming YAN, Jiaxing WANG, Heqi LI, Kai LIU. Active disturbance rejection control of carrier-based aircraft based on offline network/online identification [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531317-531317. |
| [3] | Zibo LIU, Ran ZHANG, Wenchao XUE, Huifeng LI. Active disturbance rejection control for load relief of launch vehicles considering elastic effects [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 330319-330319. |
| [4] | Dapeng ZHOU, Xiaolei QU. Knowledge-based intelligent pigeon-inspired optimization of carrier-based aircraft landing control [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730801-730801. |
| [5] | Mingqing LU, Fei LIAO, Fukui GAO, Beibei XING, Shichong WU, Zhaolin FAN, Yumin SU, Wenhua WU. Nonlinear disturbance observer enhanced adaptive backstepping tracking control for coaxial HAUV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(23): 330361-330361. |
| [6] | Hongyan ZHANG, Wei WANG, Shiwei CHEN, Yi JI, Jiaqi LIU. Integrated guidance and control design based on fully actuated system method [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628891-628891. |
| [7] | Zeyang YIN, Youpeng XING, Fei HAN, Caisheng WEI, Yuxin LIAO. Fully-actuated prescribed performance control of spacecraft formation for flying cooperatively around non-cooperative target [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628904-628904. |
| [8] | Xinyu HOU, Fan ZHANG, Panfeng HUANG, Xiaofei MA, Jialong ZHU, Yang LI. Integrated attitude and vibration control of space large antenna with truss [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727552-727552. |
| [9] | Zheng LI, Jianqiao YU, Xinyun ZHAO. Fixed⁃time convergent sliding mode control for agile turn of air⁃to⁃air missiles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327262-327262. |
| [10] | Shihao XU, Yingzi GUAN, Jialun PU, Changzhu WEI. Predefined-time sliding mode control for VTHL launch vehicle in reentry phase [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 326857-326857. |
| [11] | Liang ZHANG, Danyu LI, Naigang CUI, Yuan LI. Full flight profile prescribed performance control for vertical take-off and vertical landing reusable launch vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(23): 628103-628103. |
| [12] | Jiaqi SHAO, Xiaohui ZHANG, Hanyu XI, Zirong LIU. Multi⁃loop energy control method of linear active disturbance rejection for solar⁃powered UAVs [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327812-327812. |
| [13] | LI Ning, LIU Zhiyong, WANG Na, YANG Lei. Simulation on antenna servo control system based on DUEA [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(2): 324986-324986. |
| [14] | LI Xia, QI Guoyuan, GUO Xitong, ZHAO Xu. High-order differential feedback control and its application in quadrotor UAV [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(12): 326047-326047. |
| [15] | WU Zhengping, DENG Cong, WEN hai. Fuzzy linear/nonlinear active disturbance rejection switching control and its application [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(9): 324710-324710. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341