Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (4): 332208.doi: 10.7527/S1000-6893.2025.32208
• Electronics and Electrical Engineering and Control • Previous Articles
Kewen WU, Bin ZHAO( ), Yanying TAN
), Yanying TAN
Received:2025-05-08
Revised:2025-06-11
Accepted:2025-07-17
Online:2025-07-28
Published:2025-07-25
Contact:
Bin ZHAO
E-mail:binzhao@nwpu.edu.cn
Supported by:CLC Number:
Kewen WU, Bin ZHAO, Yanying TAN. Aerial recovery mission planning method for UAV swarm[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(4): 332208.

Fig.1
Aerial recovery mission scene
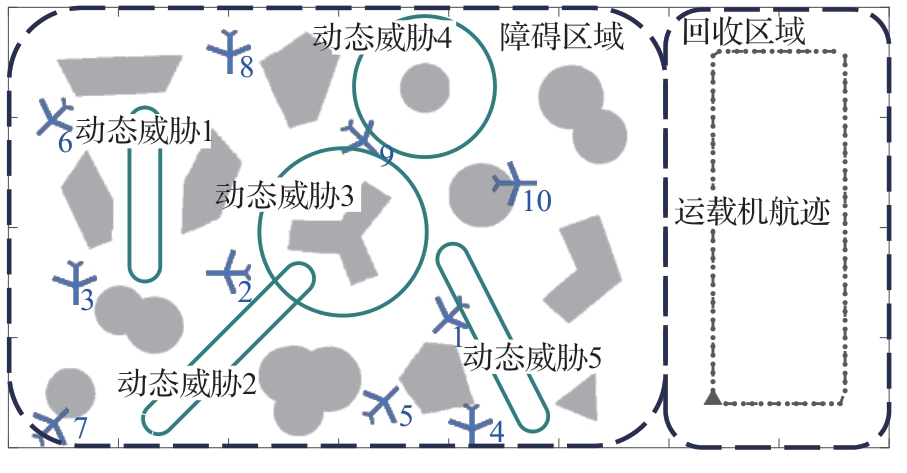
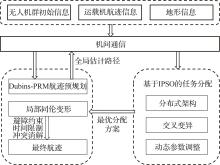
Fig.2
Architecture of hierarchical mission planning
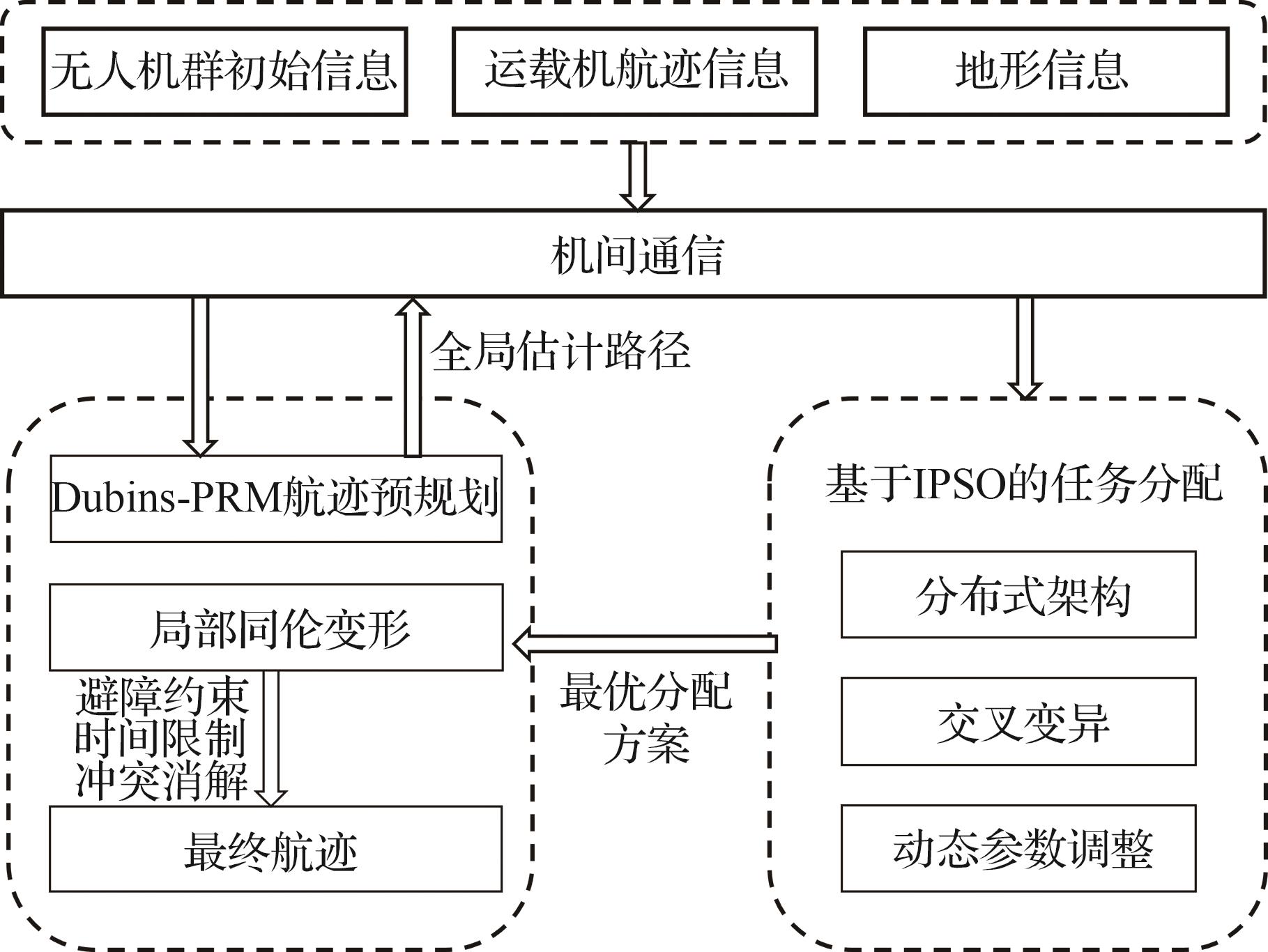

Fig.3
PRM-path pruning and connection using Dubins curve
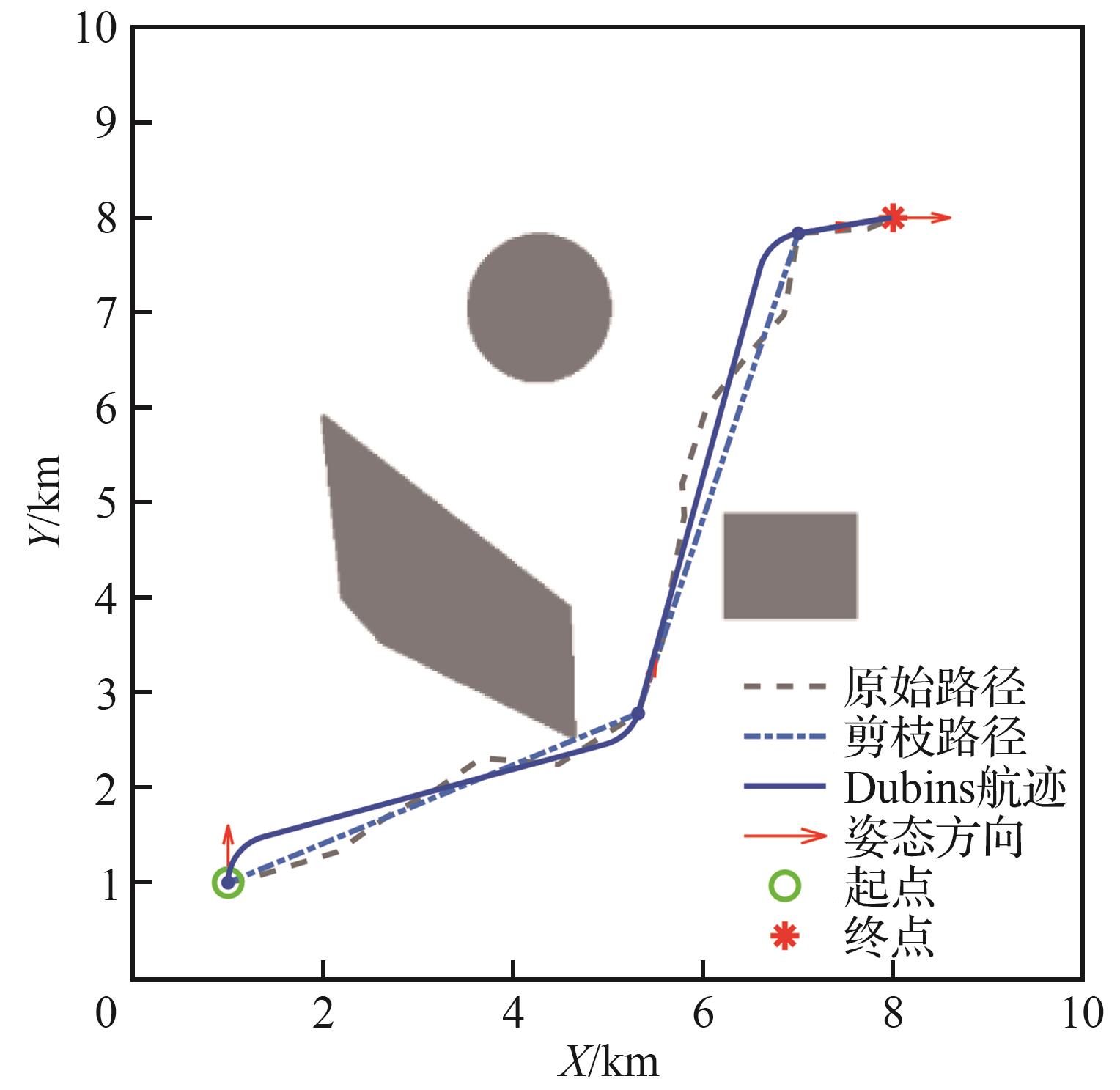
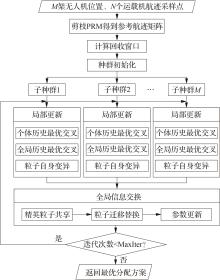
Fig.4
Process of task assignment
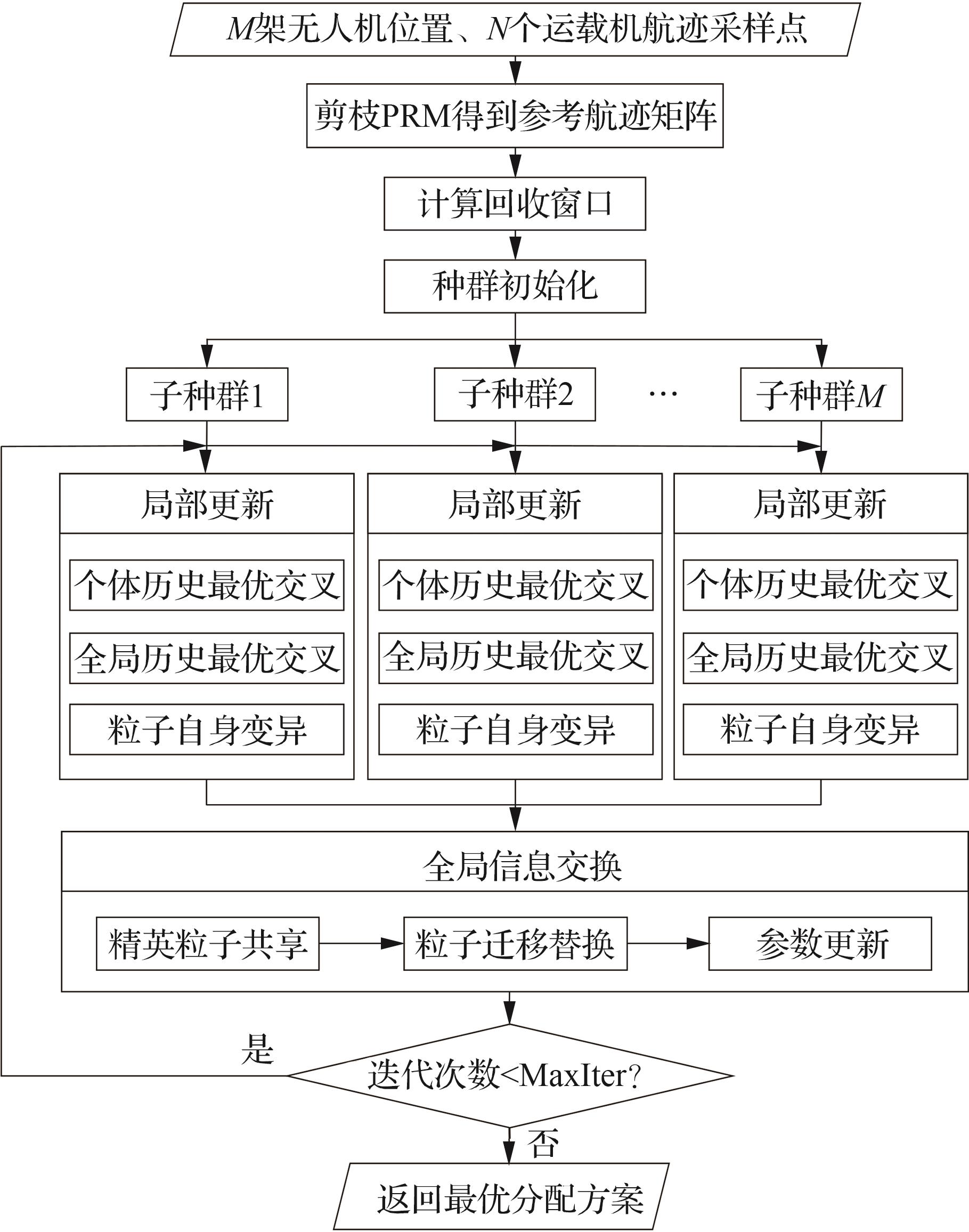
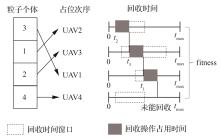
Fig.5
Decoding method
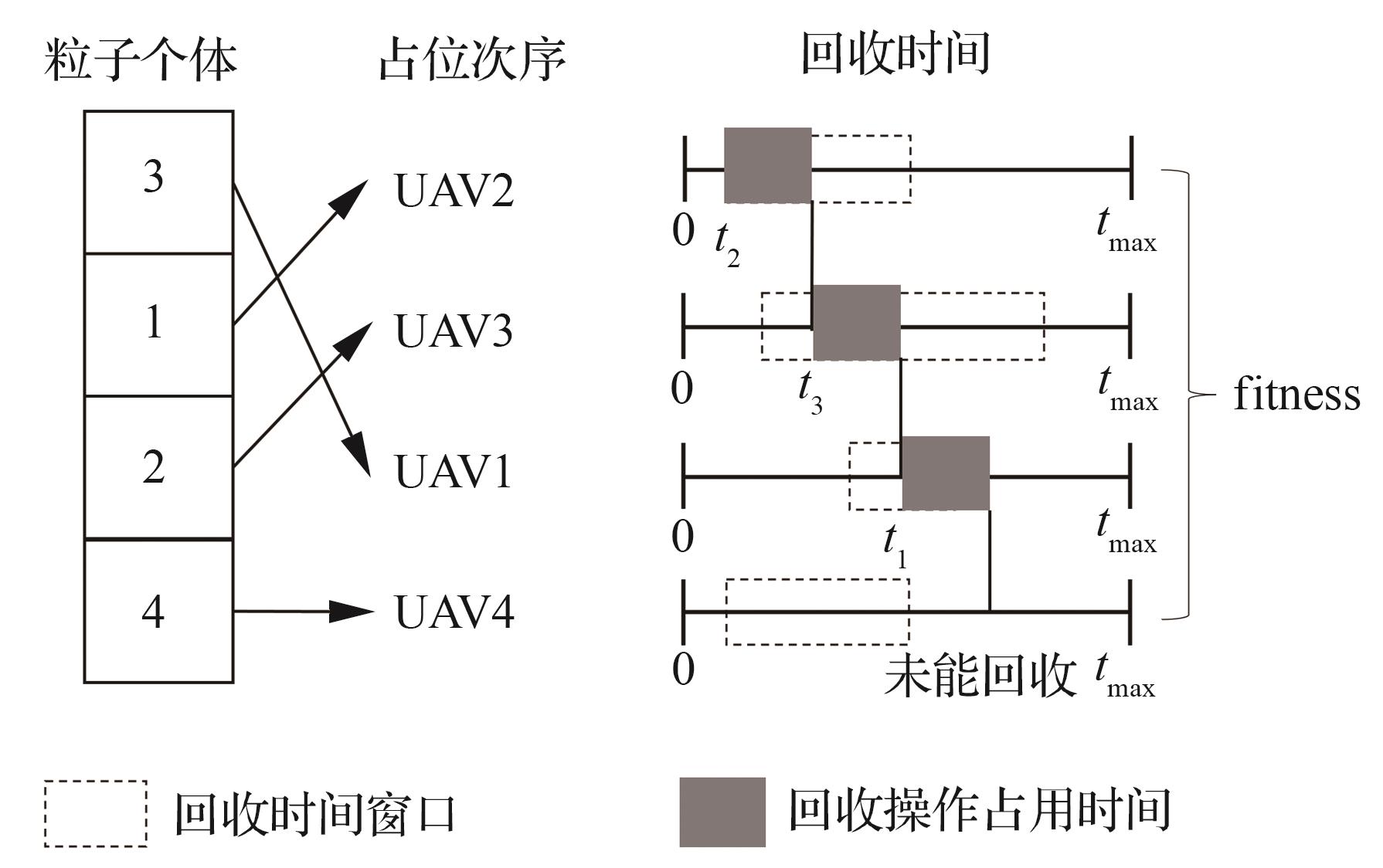
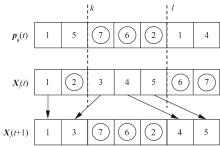
Fig.6
Crossover operator
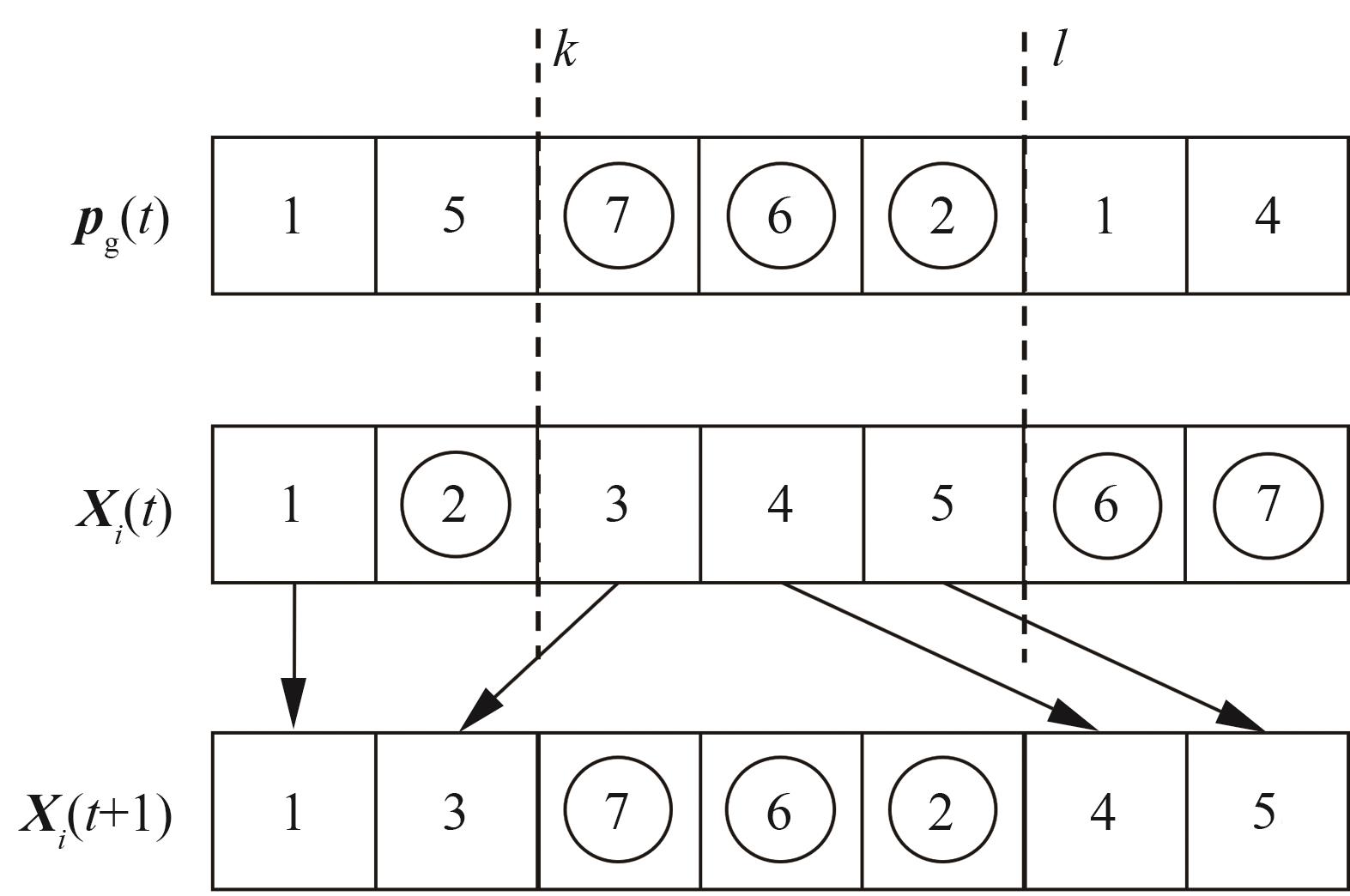
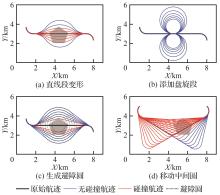
Fig.7
Four types of homotopy trajectory
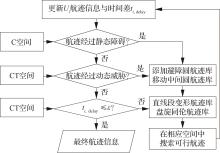
Fig.8
Process of local trajectory planning
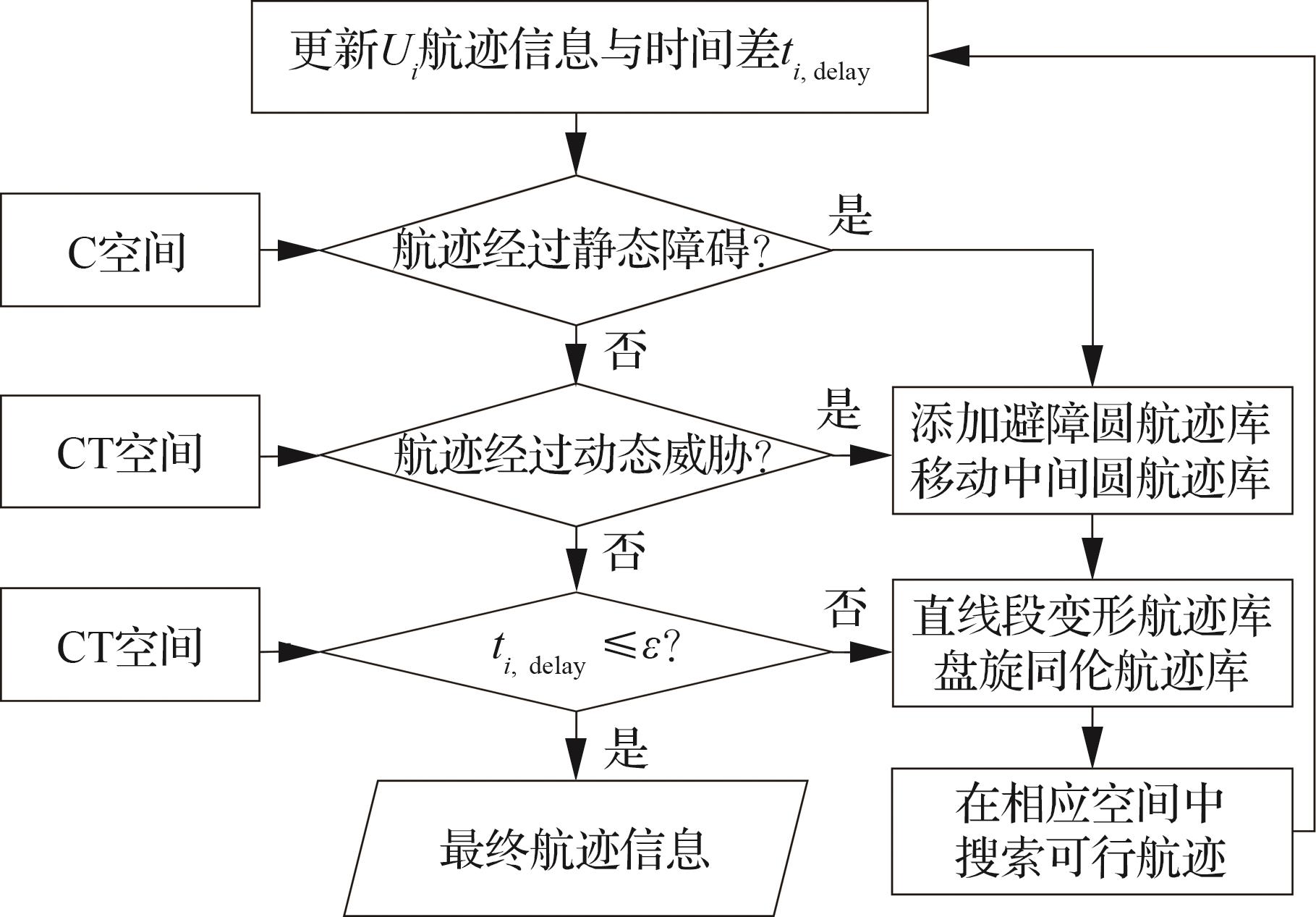
Table 1
Information of UAVs
| 编号 | 位置/km | 姿态角/rad | 回收价值 | 航时/s |
|---|---|---|---|---|
| 1 | (200, 60) | 3π/4 | 1 300 | 1 400 |
| 2 | (100,80) | π | 2 200 | 2 100 |
| 3 | (30,75) | π/2 | 1 450 | 2 500 |
| 4 | (210,10) | π/2 | 1 500 | 2 000 |
| 5 | (170,20) | -π/4 | 1 330 | 2 400 |
| 6 | (20,150) | 3π/4 | 1 320 | 2 400 |
| 7 | (20,10) | -π/4 | 2 200 | 2 800 |
| 8 | (100,180) | π/2 | 1 500 | 1 800 |
| 9 | (160,140) | π/4 | 2 400 | 1 600 |
| 10 | (230,120) | 0 | 1 300 | 1 400 |
| 11(1 620 s) | (230,120) | -π/4 | 1 480 | 1 030 |
| 12(1 620 s) | (230,120) | π/2 | 1 560 | 850 |
Table 2
Algorithm parameters
| 种群大小 | 迭代次数 | PRM连通范围 | 采样点数 | ||
|---|---|---|---|---|---|
| 100×10 | 50 | 0.9 | 2 | [10 km, 25 km] | 2 400 |
Table 3
Recovery scheme
| 编号 | 位置/km | 姿态角/rad | 回收时间/s | 时间差/s |
|---|---|---|---|---|
| 1 | (320,90) | π/2 | 840 | 180.0 |
| 2 | (380,145.88) | -π/2 | 1 740 | 241.6 |
| 3 | (380,109.88) | -π/2 | 1 920 | 131.5 |
| 4 | (320.86,162) | π/2 | 1 200 | 242.2 |
| 5 | (374.86,180) | 0 | 1 560 | 234.9 |
| 6 | (380,37.88) | -π/2 | 2 280 | 330.6 |
| 7 | (380,73.88) | -π/2 | 2 100 | 249.4 |
| 8 | (338.86,180) | 0 | 1 380 | 174.3 |
| 9 | (320,126) | π/2 | 1 020 | 208.5 |
| 10 | (320,54) | π/2 | 660 | 70.2 |

Fig.9
Recovery planning scheme for 10 UAVs
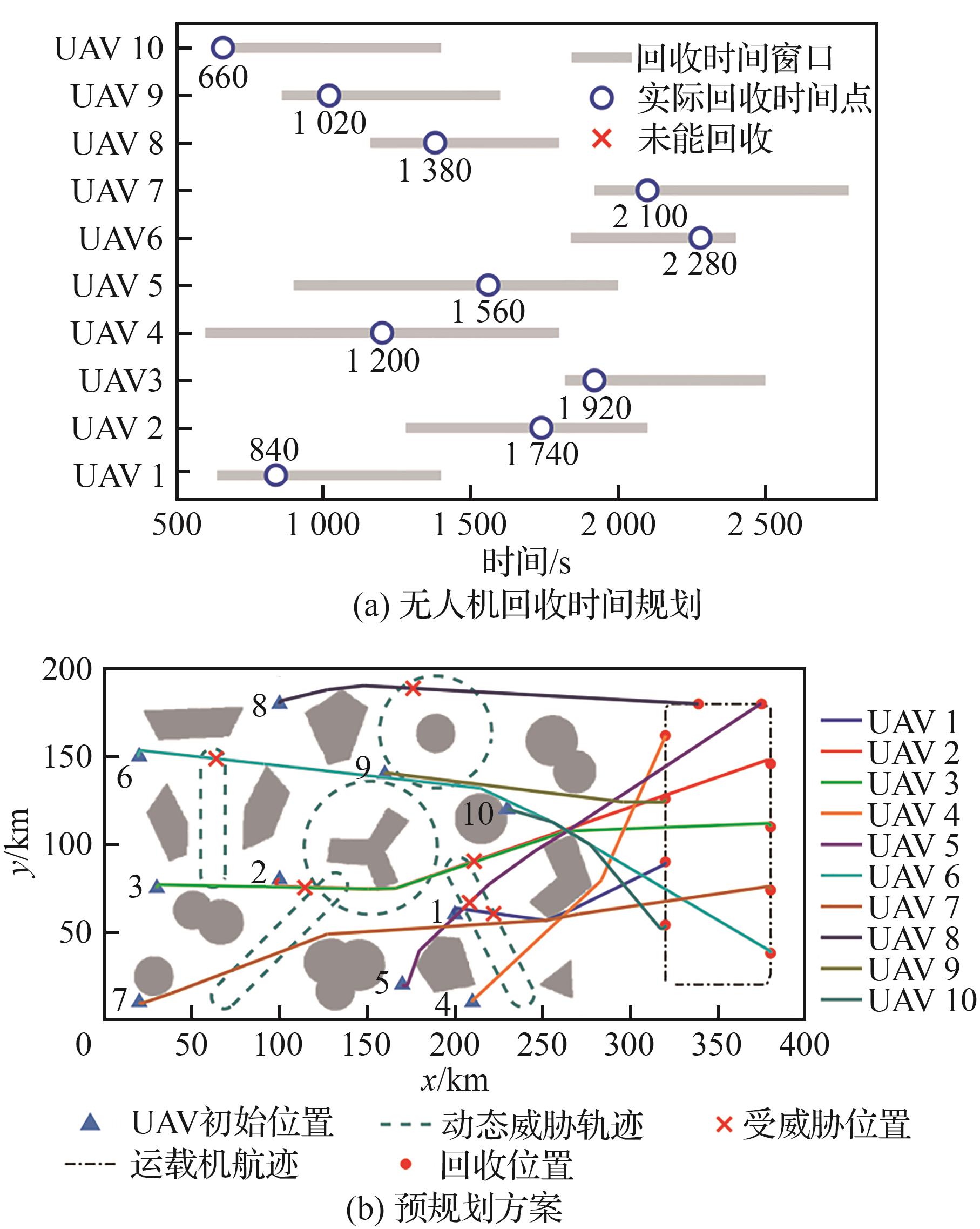
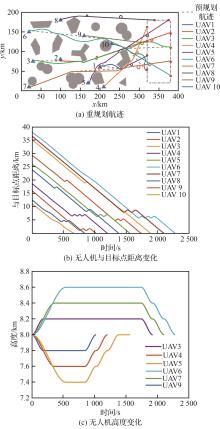
Fig.10
Final planning results
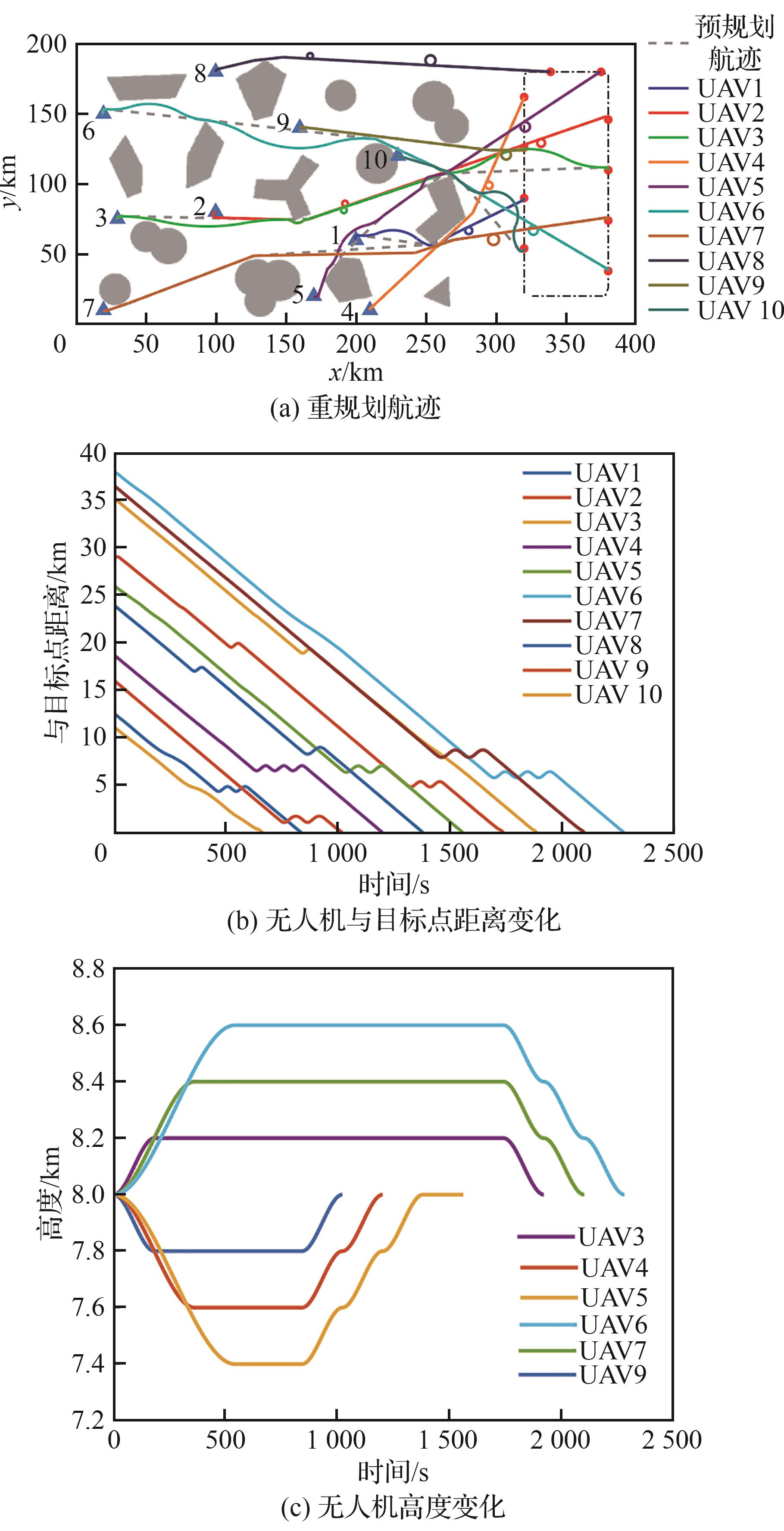
Table 4
Replanning recovery scheme
| 编号 | 位置/km | 姿态角/rad | 回收时间/s | 时间差/s |
|---|---|---|---|---|
| 2 | (380, 137.88) | -π/2 | 1 780 | 22.1 |
| 3 | (380,61.88) | -π/2 | 2 160 | 133.3 |
| 6 | (380,97.88) | -π/2 | 1 980 | 19.1 |
| 11 | (329.82,20) | π | 2 600 | 94.7 |
| 12 | (365.82,20) | π | 2 420 | 30.1 |
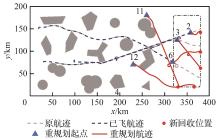
Fig.11
Replanning scheme for remaining UAVs
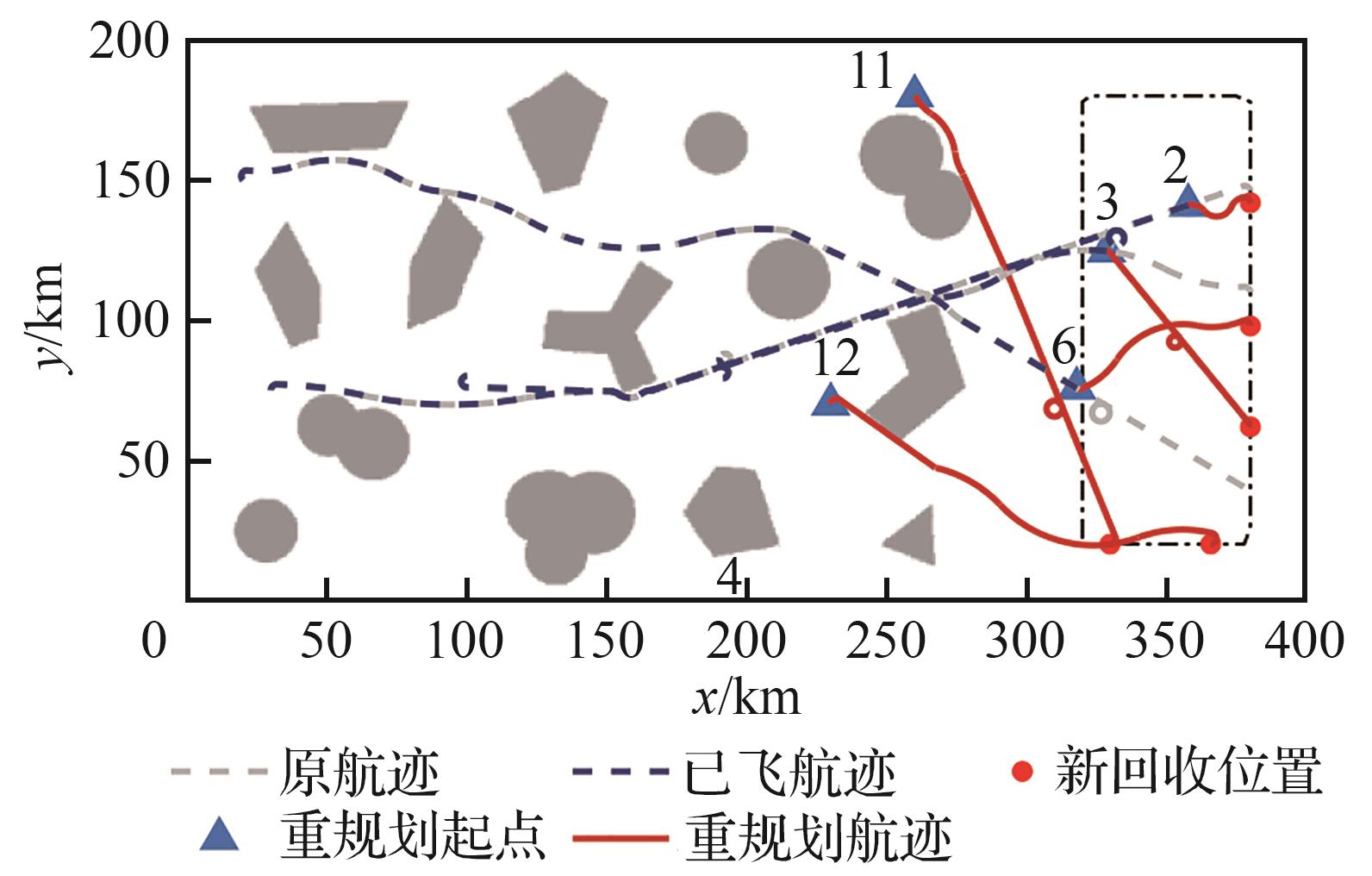
Table 5
Comparison of task assignment algorithms
| 规模 | 算法 | 全回收次数 | 平均适应度 | 标准差 |
|---|---|---|---|---|
| 10架 | DPSO | 20 | 19.80 | 0 |
| PSO | 20 | 19.80 | 0 | |
| GA | 19 | 19.69 | 0.49 | |
| 20架 | DPSO | 19 | 37.79 | 0.92 |
| PSO | 15 | 36.48 | 2.11 | |
| GA | 12 | 35.87 | 2.57 | |
| 30架 | DPSO | 15 | 56.26 | 1.21 |
| PSO | 5 | 52.45 | 2.14 | |
| GA | 8 | 53.26 | 2.82 |
Table 6
Trajectory pre-planning algorithm comparison
| 算法 | 运行时间/s | 平均相对长度 |
|---|---|---|
| PRM | 121.43 | 1.00 |
| P-PRM | 11.95 | 1.01 |
| RRT* | 376.29 | 1.13 |
| 稀疏A* | 135.60 | 1.06 |
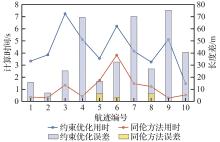
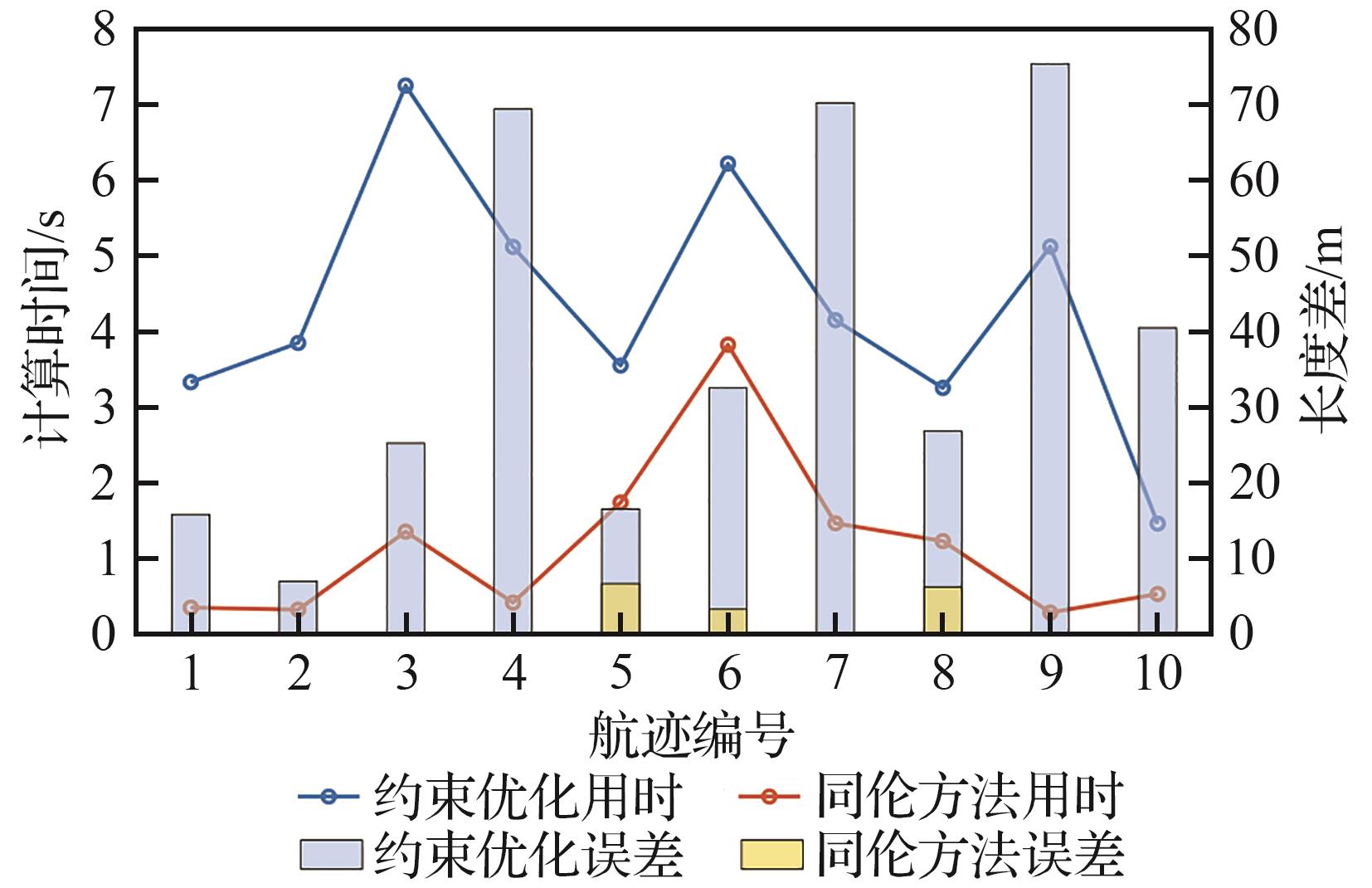
Fig.12
Comparison of trajectory extension algorithms
| [1] | SU Z K, LI C T, ZHEN Z Y. Anti-disturbance constrained control of the air recovery carrier via an integral barrier Lyapunov function[J]. Aerospace Science and Technology, 2020, 106: 106157. |
| [2] | CARTER R, KEETER T M, CALHOUN P. Airborne recovery of the X-61A gremlin unmanned aircraft[C]∥AIAA SCITECH 2024 Forum. Reston: AIAA, 2024: 0570. |
| [3] | 沈林成, 陈璟, 王楠. 飞行器任务规划技术综述[J]. 航空学报, 2014, 35(3): 593-606. |
| SHEN L C, CHEN J, WANG N. Overview of air vehicle mission planning techniques[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(3): 593-606 (in Chinese). | |
| [4] | 张国辉, 张雅楠, 高昂, 等. 空地异构无人系统侦察任务规划方法[J]. 系统仿真学报, 2024, 36(2): 497-510. |
| ZHANG G H, ZHANG Y N, GAO A, et al. Reconnaissance mission planning method for air-ground heterogeneous unmanned systems[J]. Journal of System Simulation, 2024, 36(2): 497-510 (in Chinese). | |
| [5] | WU Y, SUN L G, QU X J. A sequencing model for a team of aircraft landing on the carrier[J]. Aerospace Science and Technology, 2016, 54: 72-87. |
| [6] | 崔凯凯, 崔荣伟, 韩维, 等. 基于MGP算法的舰载机回收排序调度技术[J]. 系统工程与电子技术, 2023, 45(10): 3192-3206. |
| CUI K K, CUI R W, HAN W, et al. Carrier aircraft recovery sequencing scheduling technology based on MGP algorithm[J]. Systems Engineering and Electronics, 2023, 45(10): 3192-3206 (in Chinese). | |
| [7] | FENG X R, FENG X J, WANG X L. An ant colony optimisation method based on pruning technique for the aircraft arrival sequencing and scheduling problem[J]. International Journal of Applied Decision Sciences, 2016, 9(4): 333-347. |
| [8] | DU Z M, ZHANG J F, KANG B. A data-driven method for arrival sequencing and scheduling problem[J]. Aerospace, 2023, 10(1): 62. |
| [9] | 朱云冲, 梁彦刚, 黎克波, 等. 基于PSO和RRT的智能弹群任务分配算法[J]. 航空学报, 2023, 44(S1): 727354. |
| ZHU Y C, LIANG Y G, LI K B, et al. Task assignment algorithm for intelligent missile swarm based on PSO and RRT[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727354 (in Chinese). | |
| [10] | LIU Y B, QI N M, YAO W R, et al. Cooperative path planning for aerial recovery of a UAV swarm using genetic algorithm and homotopic approach[J]. Applied Sciences, 2020, 10(12): 4154. |
| [11] | 徐杰, 吴蔚楠, 龚春林. 多无人机任务分配/航迹规划的一体化求解方法[J]. 宇航学报, 2023, 44(12): 1860-1870. |
| XU J, WU W N, GONG C L. Integrated solution method for multi-UAV task assignment and trajectory planning[J]. Journal of Astronautics, 2023, 44(12): 1860-1870 (in Chinese). | |
| [12] | 肖鹏, 谢锋, 倪海鸿, 等. 多机任务分配与路径规划协同优化法研究[J]. 系统仿真学报, 2024, 36(5): 1141-1151. |
| XIAO P, XIE F, NI H H, et al. Research on collaborative optimization method of multi-UAV task allocation and path planning[J]. Journal of System Simulation, 2024, 36(5): 1141-1151 (in Chinese). | |
| [13] | YAO W R, QI N M, LIU Y F. Online trajectory generation with rendezvous for UAVs using multistage path prediction[J]. Journal of Aerospace Engineering, 2017, 30(3): 04016092. |
| [14] | MOON S, OH E, SHIM D H. An integral framework of task assignment and path planning for multiple unmanned aerial vehicles in dynamic environments[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1): 303-313. |
| [15] | BABEL L. Coordinated target assignment and UAV path planning with timing constraints[J]. Journal of Intelligent & Robotic Systems, 2019, 94(3): 857-869. |
| [16] | 孙小雷, 齐乃明, 董程, 等. 无人机任务分配与航迹规划协同控制方法[J]. 系统工程与电子技术, 2015, 37(12): 2772-2776. |
| SUN X L, QI N M, DONG C, et al. Cooperative control algorithm of task assignment and path planning for multiple UAVs[J]. Systems Engineering and Electronics, 2015, 37(12): 2772-2776 (in Chinese). | |
| [17] | ZHU Z X, TANG B W, YUAN J P. Multirobot task allocation based on an improved particle swarm optimization approach[J]. International Journal of Advanced Robotic Systems, 2017, 14(3): 172988141771031. |
| [18] | JIN Q G, HU Q W, ZHAO P C, et al. An improved probabilistic roadmap planning method for safe indoor flights of unmanned aerial vehicles[J]. Drones, 2023, 7(2): 92. |
| [19] | FU J Y, SUN G H, YAO W R, et al. On trajectory Homotopy to explore and penetrate dynamically of multi-UAV[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 24008-24019. |
| [20] | 任斯远, 王松, 陈功, 等. 具有同时到达约束的多无人机任务规划研究[J/OL]. 北京航空航天大学学报, (2024-02-26) [2025-03-18]. . |
| REN S Y, WANG S, CHEN G, et al. Research on task planning of multiple UAVs with simultaneous arrival constraints[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, (2024-02-26) [2025-03-18]. . (in Chinese). | |
| [21] | YAO W R, QI N M, YUE C F, et al. Curvature-bounded lengthening and shortening for restricted vehicle path planning[J]. IEEE Transactions on Automation Science and Engineering, 2020, 17(1): 15-28. |
| [22] | 王则柯. 同伦方法纵横谈[M]. 大连: 大连理工大学出版社, 2011. |
| WANG Z K. Talks on Homotopy method[M]. Dalian: Dalian University of Technology Press, 2011 (in Chinese). |
| [1] | Guocheng YAN, Honglun WANG, Yanxiang WANG, Yuebin LUN, Junfan ZHU. Prescribed performance anti-swing control for wing rotation process of UAV towed aerial recovery [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 331840-331840. |
| [2] | Fang GUO, Wei HAN, Yujie LIU, Jie LIU, Xichao SU, Liangliang CHENG. Scheduling for maintenance and service support of carrier-based aircraft based on variable operation process [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531195-531195. |
| [3] | Yangchao HE, Jiong LI, Lei SHAO, Xiangwei BU, Jinlin ZHANG, Boyang JI. Reentry target tracking algorithm based on improved “current” statistical model [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730800-730800. |
| [4] | Yunchong ZHU, Yangang LIANG, Kebo LI, Yuanhe LIU. Task assignment algorithm for intelligent missile swarm based on PSO and RRT [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727354-727354. |
| [5] | Honglun WANG, Yanxiang WANG, Yiheng LIU. Recovery trajectory optimization for UAV towed aerial recovery based on trajectory mapping [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628775-628775. |
| [6] | Zikang SU, Haitong CHEN, Chuntao LI, Zhuolin XING, Honglun WANG. Coordinating motion planning for towed cable system in UAV aerial recovery with unmatched envelope [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327377-327377. |
| [7] | Zikang SU, Zhongnan XU, Chuntao LI, Haitong CHEN, Honglun WANG. Modeling and docking control of UAV aerial recovery in form of telescopic boom [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 326315-326315. |
| [8] | ZHANG Ruipeng, FENG Yanxiang, YANG Yikang. Hybrid particle swarm algorithm for multi-UAV cooperative task allocation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(12): 326011-326011. |
| [9] | JIE Dangyang, LU Haoran, WU Hanling, NI Fenglei. Transporting trajectory optimization method for large space manipulator system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2018, 39(S1): 722352-722352. |
| [10] | ZHOU Kun, XIA Hongshan. Optimization Model and Algorithm for Aircraft Scheduling Problem Based on Cooperative Multi-task Assignment [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2011, 32(12): 2293-2302. |
| [11] | Zhu Yi-an;Kang Ji-chang;Hong Yuan-lin. Zhao Guang-fei. A PARALLEL FINITE ELEMENT METHOD AND ITS IMPLEMENTATION [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 1993, 14(5): 284-290. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341