Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (13): 329535-329535.doi: 10.7527/S1000-6893.2023.29535
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Shan HUANG1, Yongxi LYU1,2( ), Qi ZHU1, Kecheng LI1, Jingping SHI1,2
), Qi ZHU1, Kecheng LI1, Jingping SHI1,2
Received:2023-09-05
Revised:2023-10-07
Accepted:2023-12-11
Online:2024-07-15
Published:2023-12-18
Contact:
Yongxi LYU
E-mail:yongxilyu@nwpu.edu.cn
Supported by:CLC Number:
Shan HUANG, Yongxi LYU, Qi ZHU, Kecheng LI, Jingping SHI. Cooperative circumnavigating of unknown target by multi-UAV using only distance measurements[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(13): 329535-329535.
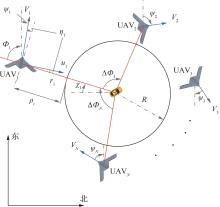
Fig.1
Geometry of cooperative circumnavigating of a target by multi-UAV
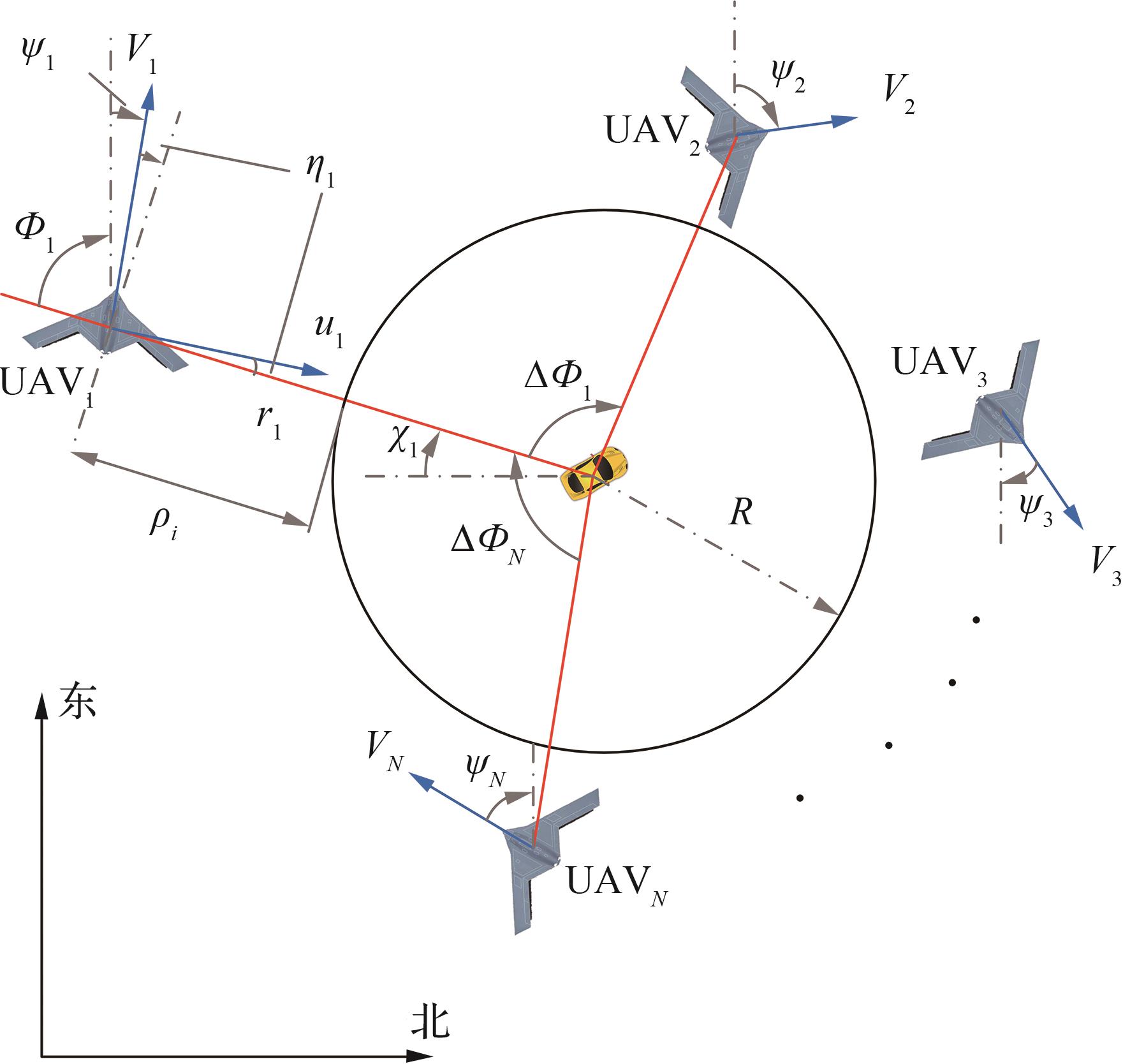
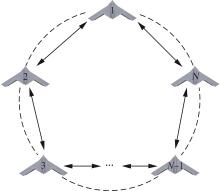
Fig.2
Inter-UAVs communication connection[26]
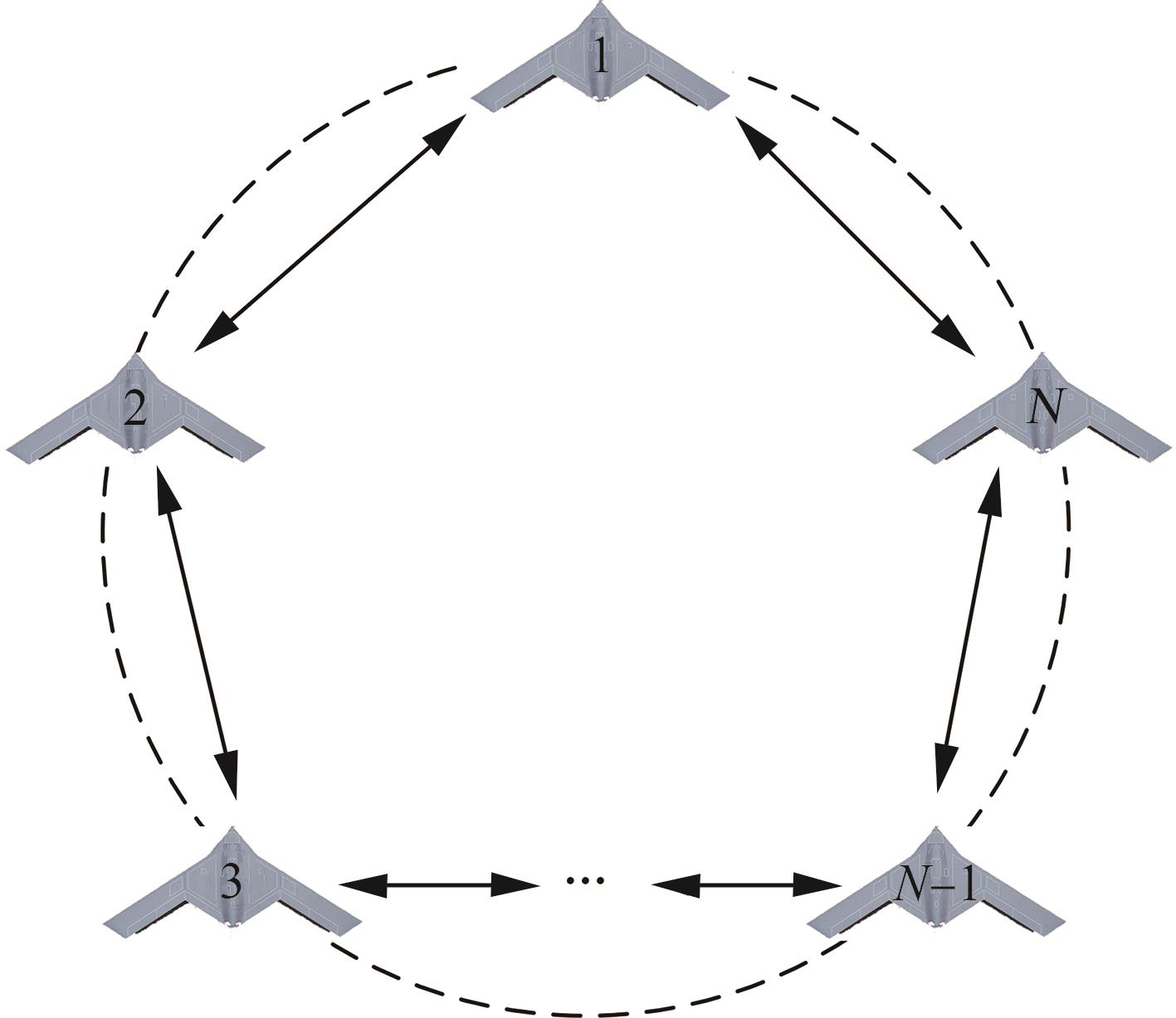

Fig.3
Logic relationship of proposed algorithms
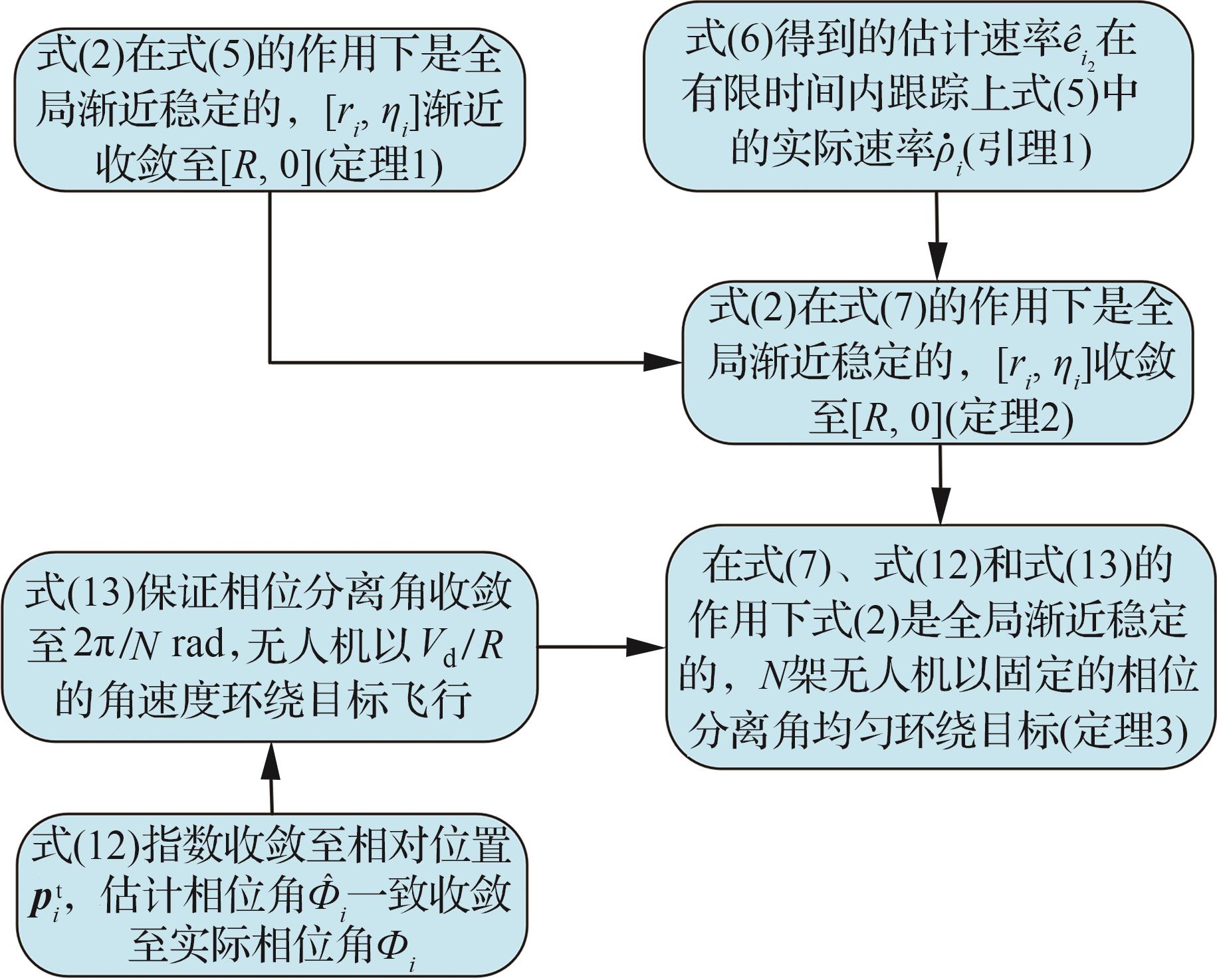
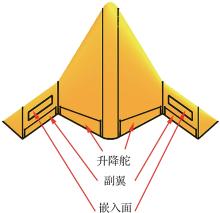
Fig.4
UAV model
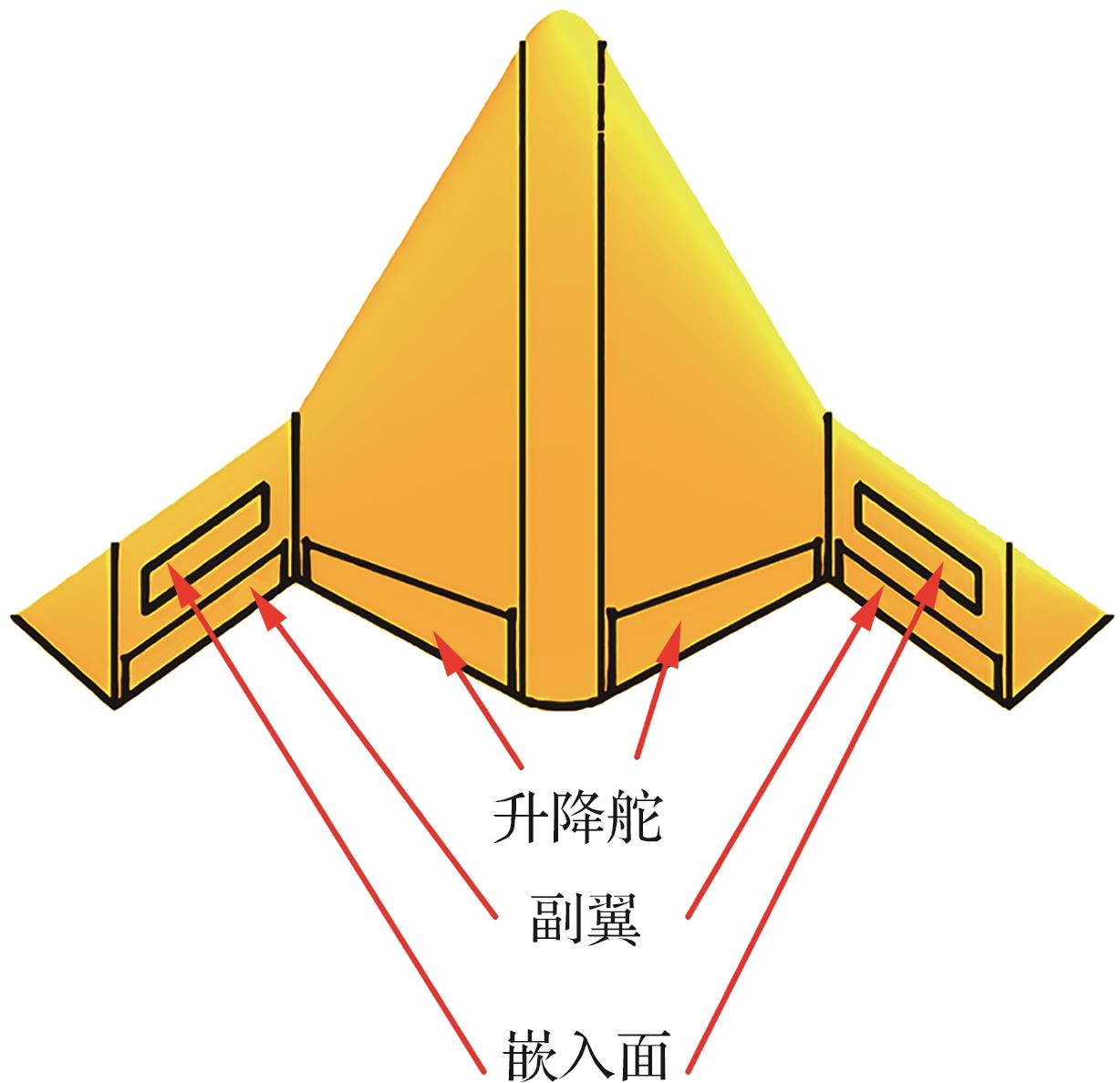

Fig.5
Control architecture for cooperative circumnavigating system
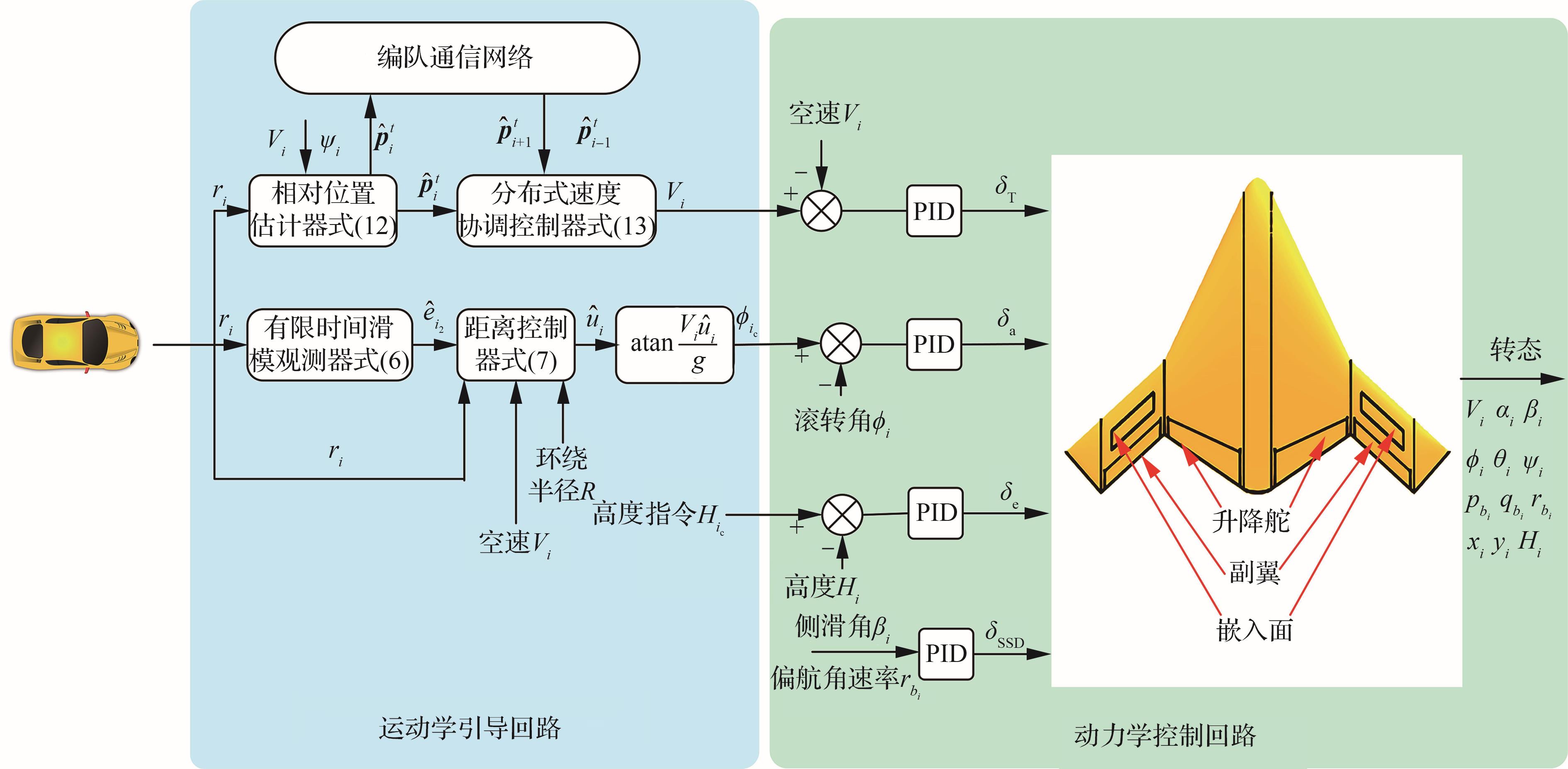

Fig.6
Comparison of different control algorithms when circumnavigating a fixed object
Fig.7
Comparison of different control algorithms when circumnavigating a moving object

Fig.8
Simulation results of cooperative circumnavigating of an object using algorithm in Ref.[17]

Fig.9
Simulation results of cooperative circumnavigating of an object using Eq. (25)
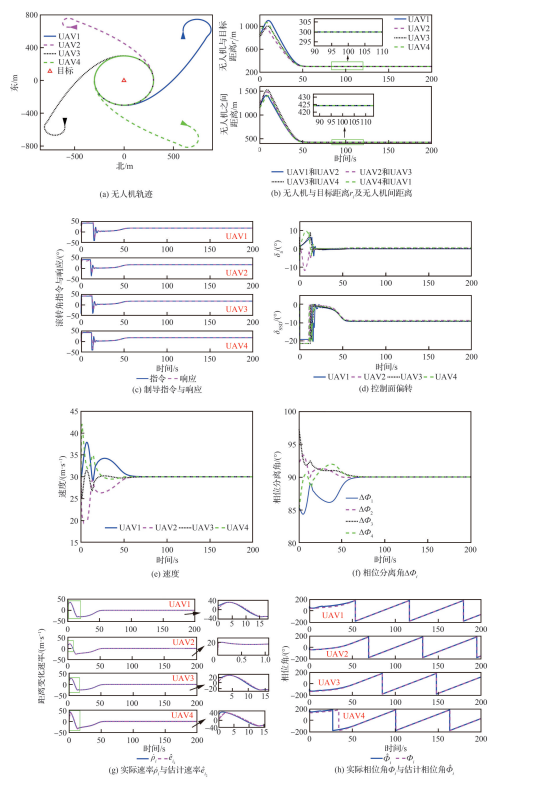
Fig.10
Structure of formation HIL simulation platform
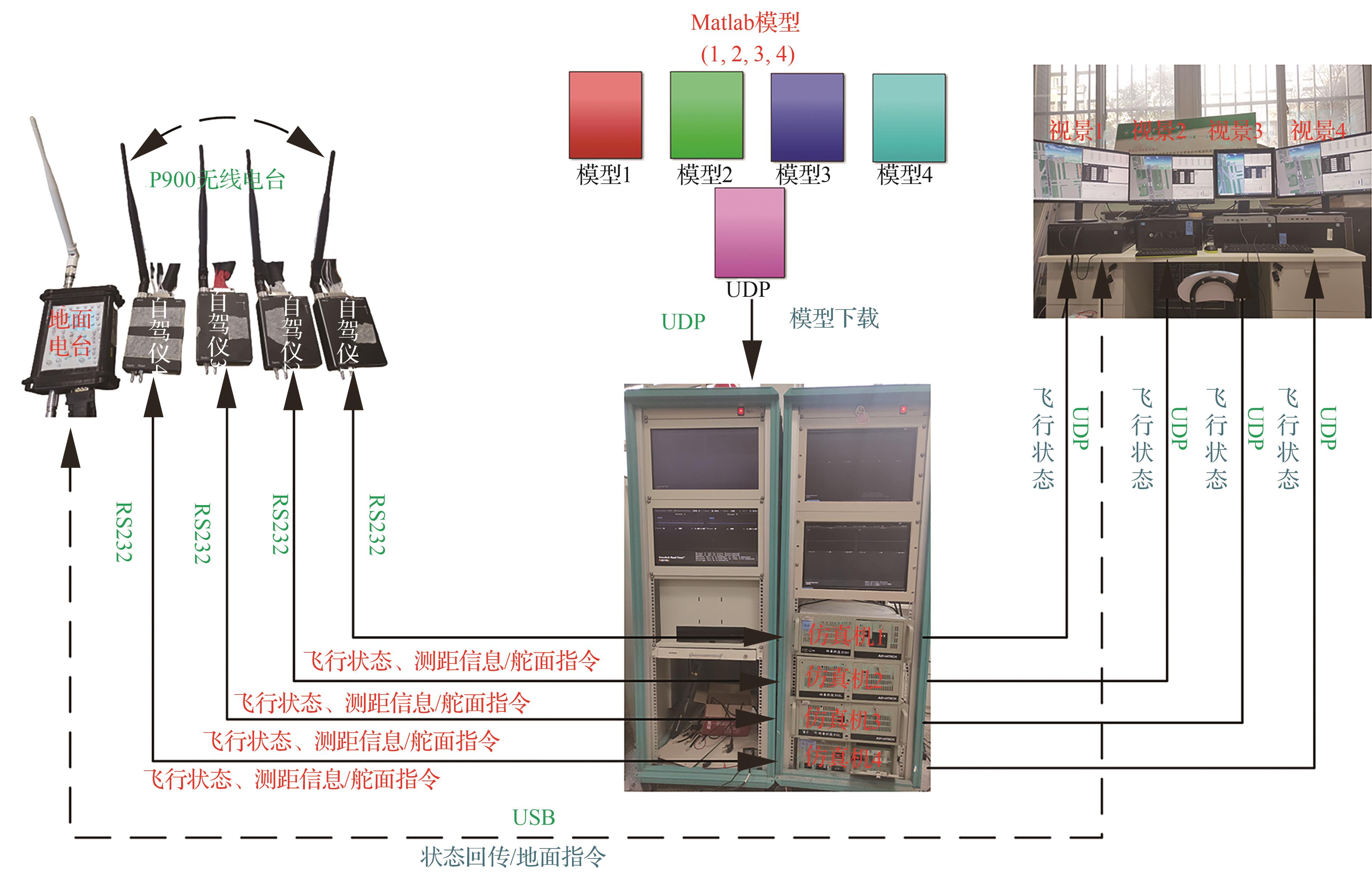

Fig.11
Display of formation HIL simulation platform
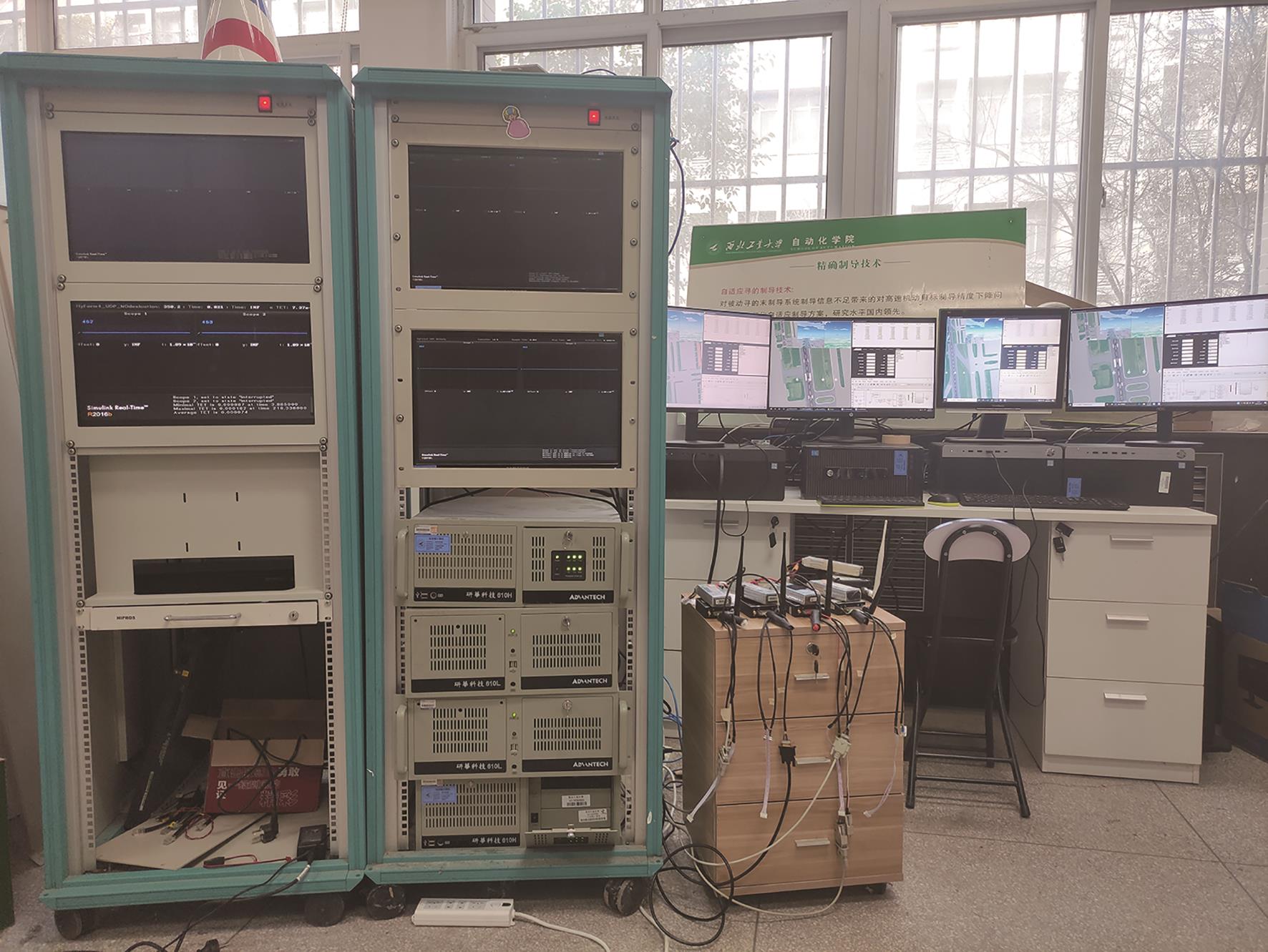

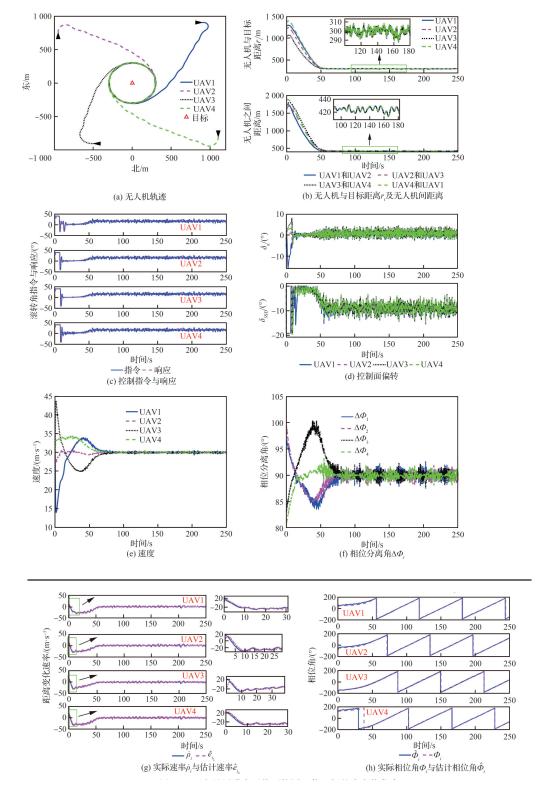
Fig.12
HIL simulation of cooperative circumnavigating of an object under distance measurement noise interference
| 1 | WANG Z, LIU L, LONG T, et al. Multi-UAV reconnaissance task allocation for heterogeneous targets using an opposition-based genetic algorithm with double-chromosome encoding[J]. Chinese Journal of Aeronautics, 2018, 31(2): 339-350. |
| 2 | ZHEN Z Y, ZHU P, XUE Y X, et al. Distributed intelligent self-organized mission planning of multi-UAV for dynamic targets cooperative search-attack[J]. Chinese Journal of Aeronautics, 2019, 32(12): 2706-2716. |
| 3 | WANG J, WU Y X, CHEN Y Q, et al. Multi-UAVs collaborative tracking of moving target with maximized visibility in urban environment[J]. Journal of the Franklin Institute, 2022, 359(11): 5512-5532. |
| 4 | WANG Y X, WANG H L, WU J F, et al. UAV standoff tracking for narrow-area target in complex environment[J]. IEEE Systems Journal, 2022, 16(3): 4583-4594. |
| 5 | HUANG S, LYU Y X, SHI J P, et al. Standoff tracking of an unknown object with only distance measurements[J]. Aerospace Science and Technology, 2023, 132: 108066. |
| 6 | 张春燕, 盛安冬, 戚国庆, 等. 基于反步法的有限时间机器人环航控制器设计[J]. 自动化学报, 2019, 45(3): 540-552. |
| ZHANG C Y, SHENG A D, QI G Q, et al. Finite-time standoff tracking control of moving target by means of backstepping for non-holonmic robot[J]. Acta Automatica Sinica, 2019, 45(3): 540-552 (in Chinese). | |
| 7 | SRINIVASU N, RATNOO A. Standoff target tracking using line-of-sight distance bifurcation[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(10): 1934-1945. |
| 8 | XU B W, ZHANG H T, MENG H F, et al. Moving target surrounding control of linear multiagent systems with input saturation[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(3): 1705-1715. |
| 9 | SUMMERS T H, AKELLA M R, MEARS M J. Coordinated standoff tracking of moving targets: Control laws and information architectures[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(1): 56-69. |
| 10 | FREW E W, LAWRENCE D A, MORRIS S. Coordinated standoff tracking of moving targets using Lyapunov guidance vector fields[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(2): 290-306. |
| 11 | POTHEN A A, RATNOO A. Curvature-constrained Lyapunov vector field for standoff target tracking[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(10): 2729-2736. |
| 12 | KOKOLAKIS N M T, KOUSSOULAS N T. Robust standoff target tracking with finite-time phase separation under unknown wind[J]. Journal of Guidance, Control, and Dynamics, 2021, 44(6): 1183-1198. |
| 13 | PARK S. Circling over a target with relative side bearing[J]. Journal of Guidance, Control, and Dynamics, 2016, 39(6): 1454-1458. |
| 14 | PARK S. Guidance law for standoff tracking of a moving object[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(11): 2948-2955. |
| 15 | KOKOLAKIS N M T, KOUSSOULAS N T. Coordinated standoff tracking of a ground moving target and the phase separation problem[C]∥2018 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2018: 473-482. |
| 16 | 赵长春, 梁浩全, 祝明, 等. 基于改进RPG方法的MUAVs协同目标跟踪[J]. 航空学报, 2016, 37(5): 1644-1656. |
| ZHAO C C, LIANG H Q, ZHU M, et al. MUAVs coordinated standoff target tracking by improved RPG method[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(5): 1644-1656 (in Chinese). | |
| 17 | ZHANG M, LIANG C Y, MEI J S. Robust guidance law for cooperative aerial target circumnavigation of UAVs based on composite system theory[J]. Aerospace Science and Technology, 2023, 140: 108439. |
| 18 | BRIÑÓN-ARRANZ L, SEURET A, PASCOAL A. Circular formation control for cooperative target tracking with limited information[J]. Journal of the Franklin Institute, 2019, 356(4): 1771-1788. |
| 19 | SHI L L, ZHENG R H, LIU M Q, et al. Distributed circumnavigation control of autonomous underwater vehicles based on local information[J]. Systems & Control Letters, 2021, 148: 104873. |
| 20 | MUSLIMOV T Z, MUNASYPOV R A. Adaptive decentralized flocking control of multi-UAV circular formations based on vector fields and backstepping[J]. ISA Transactions, 2020, 107: 143-159. |
| 21 | HE W, LI Z J, PHILIP CHEN C L. A survey of human-centered intelligent robots: Issues and challenges[J]. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4): 602-609. |
| 22 | ZHENG R H, LIN Z Y, FU M Y, et al. Distributed control for uniform circumnavigation of ring-coupled unicycles[J]. Automatica (Journal of IFAC), 2015, 53(C): 23-29. |
| 23 | YU X, XU X, LIU L, et al. Circular formation of networked dynamic unicycles by a distributed dynamic control law[J]. Automatica, 2018, 89: 1-7. |
| 24 | JAIN P, PETERSON C K, BEARD R W. Encirclement of moving targets using noisy range and bearing measurements[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(8): 1399-1414. |
| 25 | ZOU Y, WANG L, MENG Z Y. Distributed localization and circumnavigation algorithms for a multiagent system with persistent and intermittent bearing measurements[J]. IEEE Transactions on Control Systems Technology, 2021, 29(5): 2092-2101. |
| 26 | LI R, SHI Y J, SONG Y D. Localization and circumnavigation of multiple agents along an unknown target based on bearing-only measurement: A three dimensional solution[J]. Automatica (Journal of IFAC), 2018, 94(C): 18-25. |
| 27 | SEN A, SAHOO S R, KOTHARI M. Circumnavigation on multiple circles around a nonstationary target with desired angular spacing[J]. IEEE Transactions on Cybernetics, 2021, 51(1): 222-232. |
| 28 | CHEN K, QI G Q, LI Y Y, et al. Finite-time target localization and multicircular circumnavigation with bearing-only measurements[J]. Journal of the Franklin Institute, 2023, 360(9): 6338-6356. |
| 29 | ZOU Y, YANG W F, HE W, et al. Coordinate-free distributed localization and circumnavigation for nonholonomic vehicles without position information[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(5): 2523-2534. |
| 30 | CHEN K, QI G Q, LI Y Y, et al. Cooperative localization and circumnavigation of multiple targets with bearing-only measurements[J]. Journal of the Franklin Institute, 2023, 360(12): 9159-9179. |
| 31 | 张民, 田鹏飞, 陈欣. 一种无人机定距盘旋跟踪制导律及稳定性证明[J]. 航空学报, 2016, 37(11): 3425-3434. |
| ZHANG M, TIAN P F, CHEN X. UAV guidance law for circumnavigating and tracking ground target and its stability proof[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(11): 3425-3434 (in Chinese). | |
| 32 | WANG J, MA B L, YAN K. Mobile robot circumnavigating an unknown target using only range rate measurement[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(2): 509-513. |
| 33 | MILUTINOVIĆ D, CASBEER D, CAO Y C, et al. Coordinate frame free Dubins vehicle circumnavigation using only range-based measurements[J]. International Journal of Robust and Nonlinear Control, 2017, 27(16): 2937-2960. |
| 34 | DONG F, YOU K Y, SONG S J. Target encirclement with any smooth pattern using range-based measurements[J]. Automatica, 2020, 116: 108932. |
| 35 | MATVEEV A S, SEMAKOVA A A. Range-only-based three-dimensional circumnavigation of multiple moving targets by a nonholonomic mobile robot[J]. IEEE Transactions on Automatic Control, 2018, 63(7): 2032-2045. |
| 36 | CAO Y C. UAV circumnavigating an unknown target under a GPS-denied environment with range-only measurements[J]. Automatica, 2015, 55: 150-158. |
| 37 | DONG F, YOU K Y, XIE L H, et al. Coordinate-free circumnavigation of a moving target via a PD-like controller[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(3): 2012-2025. |
| 38 | PENG X H, GUO K X, LI X, et al. Cooperative moving-target enclosing control for multiple nonholonomic vehicles using feedback linearization approach[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(8): 4929-4935. |
| 39 | CAO Y C, CASBEER D, MILUTINOVIC D, et al. Collective circular motion and cooperative circumnavigation for nonholonomic mobile robots using range-based measurements. Reston: AIAA-2016-2104[R]. Reston: AIAA, 2016. |
| 40 | JIA J B, CHEN X, WANG W Z, et al. Distributed control of target cooperative encirclement and tracking using range‐based measurements[J]. Asian Journal of Control, 2023, 25(6): 4595-4608. |
| 41 | MORENO J A, OSORIO M. Strict Lyapunov functions for the super-twisting algorithm[J]. IEEE Transactions on Automatic Control, 2012, 57(4): 1035-1040. |
| 42 | MILUTINOVIĆ D, CASBEER D, CAO Y C, et al. Coordinate frame free Dubins vehicle circumnavigation[C]∥2014 American Control Conference. Piscataway: IEEE Press, 2014: 891-896. |
| 43 | ANDERSON B. Exponential stability of linear equations arising in adaptive identification[J]. IEEE Transactions on Automatic Control, 1977, 22(1): 83-88. |
| 44 | PANTELEY E, LORIA A. On global uniform asymptotic stability of nonlinear time-varying systems in cascade[J]. Systems & Control Letters, 1998, 33(2): 131-138. |
| 45 | BENABDALLAH A, DLALA M, HAMMAMI M ALI. A new Lyapunov function for stability of time-varying nonlinear perturbed systems[J]. Systems & Control Letters, 2007, 56(3): 179-187. |
| 46 | KHALIL H K. Nonlinear systems[M]. 3rd ed. Upper Saddle River: Prentice Hall, 2002: 139-144. |
| [1] | Zhu WANG, Mengtong ZHANG, Zhenpeng ZHANG, Guangtong XU. Multi-UAV cooperative path planning based on multi-index dynamic priority [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328816-328816. |
| [2] | Xiaowei FU, Zhe XU, Jindong ZHU, Nan WANG. Maneuvering decision-making of multi-UAV attack-defence confrontation based on PER-MATD3 [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327083-327083. |
| [3] | NIU Guangyue, DUAN Fajie, ZHOU Qi, LIU Zhibo. A dynamic measurement method of blade tip clearance based on microwave phase difference ranging [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 625396-625396. |
| [4] | FU Xiaowei, WANG Hui, XU Zhe. Cooperative pursuit strategy for multi-UAVs based on DE-MADDPG algorithm [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(5): 325311-325311. |
| [5] | XUE Zhentao, CHEN Jian, ZHANG Zichao, LIU Xuzan, MIAO Xiansheng, HU Gui. Multi-UAV coverage path planning based on optimization of convex division of complex plots [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(12): 325990-325990. |
| [6] | WANG Tong, HUANG Panfeng, DONG Gangqi. Cooperation path planning of multi-UAV in road-network continuous monitoring [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723753-723753. |
| [7] | CHEN Can, MO Li, ZHENG Duo, CHENG Ziheng, LIN Defu. Cooperative attack-defense game of multiple UAVs with asymmetric maneuverability [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(12): 324152-324152. |
| [8] | HUANG Yang, TANG Jun, LAO Songyang. UAV flight conflict resolution algorithm based on complex network [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2018, 39(12): 322222-322222. |
| [9] | FU Xiaowei, LI Jian, GAO Xiaoguang. Target Allocation in Multi-UAV Cooperative Search with Communication Constraints [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2014, 35(5): 1347-1356. |
| [10] | LIU Haitao, CHENG Wei, ZHANG Xuejun. DME Pulse Interference Mitigation Method Based on Joint Orthogonal Transform and Signal Interleaving [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2014, 35(5): 1365-1373. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341