| [1] |
朱继宏, 韩嘉诚, 谷小军, 等. 跨域飞行器结构与变构型设计技术进展与挑战[J]. 航空学报, 2025, 46(18):431686.
|
|
ZHU J H, HAN J C, GU X J,et al. Advances and challenges in cross-domain vehicle structures and morphing configuration design technologies[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 431686 (in Chinese).
|
| [2] |
MAGALHÃES J M JR, HALILA G L O, KIM Y, et al. Intelligent data-driven aerodynamic analysis and optimization of morphing configurations[J]. Aerospace Science and Technology, 2022, 121: 107388.
|
| [3] |
BAO C Y, WANG P, HE R Z, et al. Observer-based optimal control method combination with event-triggered strategy for hypersonic morphing vehicle[J]. Aerospace Science and Technology, 2023, 136: 108219.
|
| [4] |
CHEN H L, WANG P, TANG G J. Fuzzy disturbance observer-based fixed-time sliding mode control for hypersonic morphing vehicles with uncertainties[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 3521-3530.
|
| [5] |
张豪, 王鹏, 汤国建, 等. 高超声速变外形飞行器事件触发有限时间控制[J]. 航空学报, 2023, 44(15): 528494.
|
|
ZHANG H, WANG P, TANG G J, et al. Event-triggered fast finite-time control for hypersonic morphing vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528494 (in Chinese).
|
| [6] |
YIN T T, GU Z, XIE X P. Observer-based event-triggered sliding mode control for secure formation tracking of multi-UAV systems[J]. IEEE Transactions on Network Science and Engineering, 2023, 10(2): 887-898.
|
| [7] |
ZE K R, WANG W, LIU K X, et al. Time-varying formation planning and distributed control for multiple UAVs in clutter environment[J]. IEEE Transactions on Industrial Electronics, 2024, 71(9): 11305-11315.
|
| [8] |
JIA T H, YAN H C, ZHANG H, et al. Adaptive anti-disturbance performance guaranteed formation tracking control for quadrotor UAVs via aperiodic signal updating[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(9): 5212-5223.
|
| [9] |
LV M L, DE SCHUTTER B, BALDI S. Nonrecursive control for formation-containment of HFV swarms with dynamic event-triggered communication[J]. IEEE Transactions on Industrial Informatics, 2023, 19(3): 3188-3197.
|
| [10] |
ZHANG Y, WANG X, TANG S J. A globally fixed-time solution of distributed formation control for multiple hypersonic gliding vehicles[J]. Aerospace Science and Technology, 2020, 98: 105643.
|
| [11] |
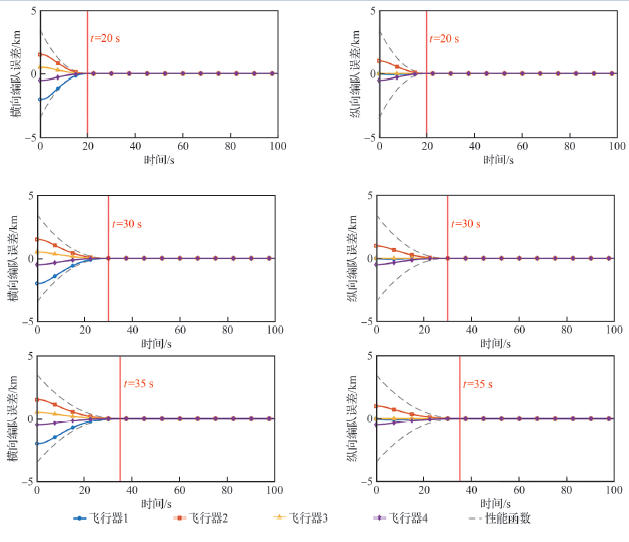
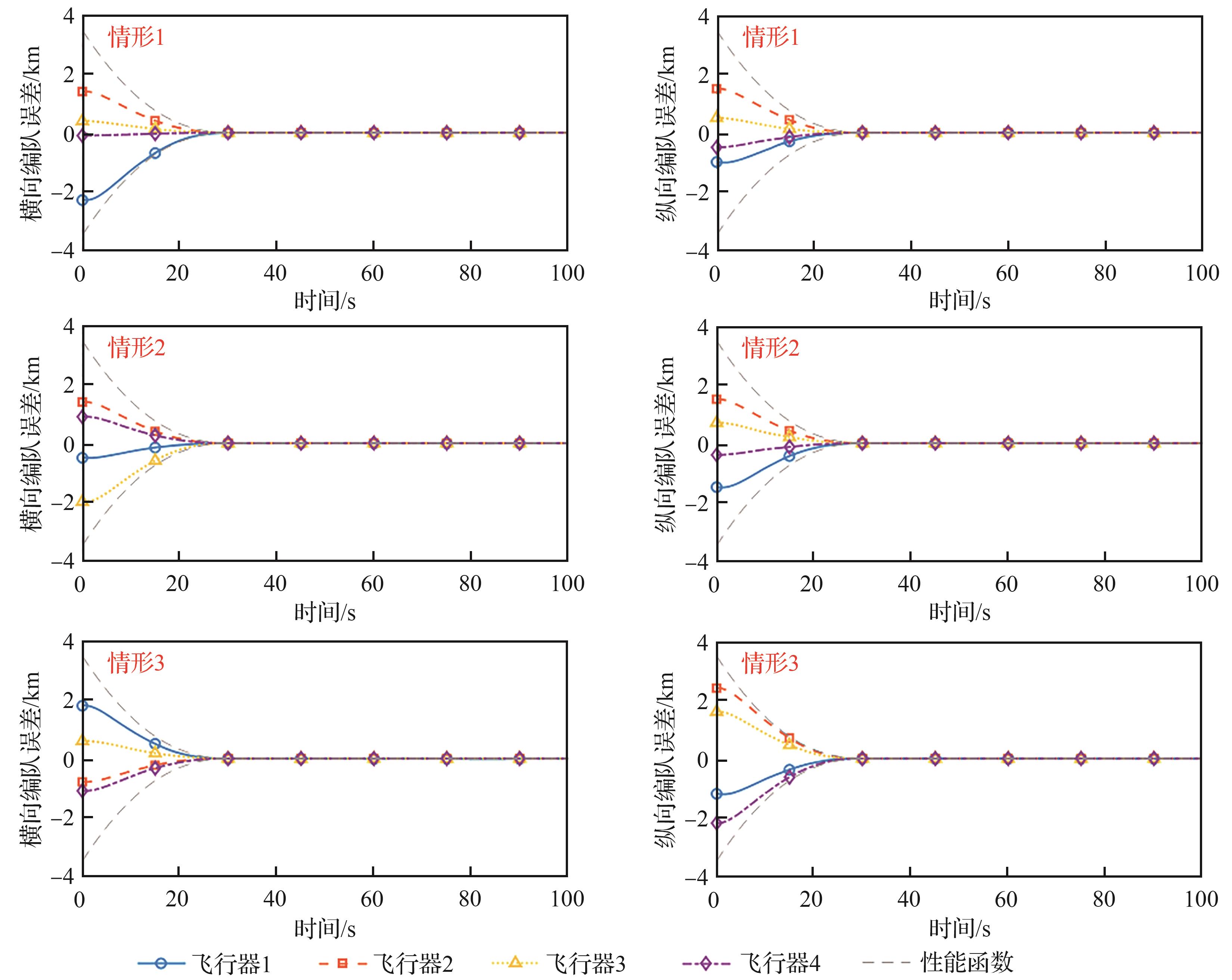
郑巧巧, 陈谋 .基于性能函数的高速飞行器编队切换控制方法[J].航空学报, 2026, 47(S1): 732951.
|
|
ZHENG Q Q, CHEN M. Formation switching control for high speed aircraft based on performance function [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(S1): 732951 (in Chinese).
|
| [12] |
VU L, CHATTERJEE D, LIBERZON D. Input-to-state stability of switched systems and switching adaptive control[J]. Automatica, 2007, 43(4): 639-646.
|
| [13] |
LIU L, LIU Y J, TONG S C. Fuzzy-based multierror constraint control for switched nonlinear systems and its applications[J]. IEEE Transactions on Fuzzy Systems, 2019, 27(8): 1519-1531.
|
| [14] |
ZHAO S Y, LI X B, BU X W, et al. Prescribed performance tracking control for hypersonic flight vehicles with model uncertainties[J]. International Journal of Aerospace Engineering, 2019, 2019(1): 3505614.
|
| [15] |
周雨欣, 王鹏, 汤国建, 等. 基于干扰观测器的变形飞行器预设性能控制[J]. 战术导弹技术, 2024(4): 72-82.
|
|
ZHOU Y X, WANG P, TANG G J, et al. Disturbance observer-based prescribed performance control for morphing aircraft[J]. Tactical Missile Technology, 2024(4): 72-82 (in Chinese).
|
| [16] |
PU J L, ZHANG Y H, GUAN Y Z, et al. Recurrent neural network-based predefined time control for morphing aircraft with asymmetric time-varying constraints[J]. Applied Mathematical Modelling, 2024, 135: 578-600.
|
| [17] |
LU X Y, WANG J Y, WANG Y H, et al. Neural network observer-based predefined-time attitude control for morphing hypersonic vehicles[J]. Aerospace Science and Technology, 2024, 152: 109333.
|
| [18] |
YU X, LI P, ZHANG Y M. Fixed-time actuator fault accommodation applied to hypersonic gliding vehicles[J]. IEEE Transactions on Automation Science and Engineering, 2021, 18(3): 1429-1440.
|
| [19] |
武天才, 王宏伦, 任斌, 等. 基于学习的高超声速飞行器分层协调容错方法[J]. 航空学报, 2024, 45(22): 330191.
|
|
WU T C, WANG H L, REN B, et al. Learning-based hierarchical coordination fault-tolerant method for hypersonic vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(22): 330191 (in Chinese).
|
| [20] |
刘田禾, 安昊, 王常虹. 高超声速飞行器的抗饱和切换控制[J]. 宇航学报, 2020, 41(3): 329-336.
|
|
LIU T H, AN H, WANG C H. Anti-windup switched control of hypersonic vehicle[J]. Journal of Astronautics, 2020, 41(3): 329-336 (in Chinese).
|
| [21] |
WANG J, YANG M, WANG D H, et al. Distributed average consensus attitude synchronization of multi rigid spacecrafts with predefined time event-triggered sliding mode control[J]. Aerospace Science and Technology, 2025, 159: 109975.
|
| [22] |
杨博, 朱一川, 魏延明, 等. 折叠式变体飞行器轨迹优化及控制分析[J]. 中国空间科学技术, 2020, 40(3): 64-75.
|
|
YANG B, ZHU Y C, WEI Y M, et al. Trajectory optimization and control analysis of folding wing aircraft[J]. Chinese Space Science and Technology, 2020, 40(3): 64-75 (in Chinese).
|
| [23] |
NI J K, LIU L, LIU C X, et al. Fixed-time dynamic surface high-order sliding mode control for chaotic oscillation in power system[J]. Nonlinear Dynamics, 2016, 86(1): 401-420.
|
| [24] |
WEI C S, LUO J J, YIN Z Y, et al. Leader-following consensus of second-order multi-agent systems with arbitrarily appointed-time prescribed performance[J]. IET Control Theory and Applications, 2018,12(16): 2276-2286.
|
| [25] |
韦常柱, 顾鑫, 李玉龙. 高超声速变外形飞行器固定时间抗饱和控制[J]. 宇航学报, 2025, 46(4): 731-740.
|
|
WEI C Z, GU X, LI Y L. Fixed-time anti-saturation control for hypersonic morphing flight vehicle[J]. Journal of Astronautics, 2025, 46(4): 731-740 (in Chinese).
|
| [26] |
ZHANG L X, GAO H J. Asynchronously switched control of switched linear systems with average dwell time[J]. Automatica, 2010, 46(5): 953-958.
|
| [27] |
CUI Y, ZHANG H G, WANG Y C, et al. A fuzzy adaptive tracking control for MIMO switched uncertain nonlinear systems in strict-feedback form[J]. IEEE Transactions on Fuzzy Systems, 2019, 27(12): 2443-2452.
|
| [28] |
HAN T T, GE S S, LEE T H. Adaptive neural control for a class of switched nonlinear systems[J]. Systems Control Letters, 2009, 58(2): 109-118.
|
| [29] |
SHI Y X, HU Q L, LI D Y, et al. Adaptive optimal tracking control for spacecraft formation flying with event-triggered input[J]. IEEE Transactions on Industrial Informatics, 2023, 19(5): 6418-6428.
|
| [30] |
WU C H, YAN J G, SHEN J H, et al. Predefined-time attitude stabilization of receiver aircraft in aerial refueling[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2021, 68(10): 3321-3325.
|
 ), 杨铭3, 田栢苓4, 李博皓5, 陈治世5
), 杨铭3, 田栢苓4, 李博皓5, 陈治世5