| [1] |
MCCOY R L. Modern exterior ballistics: The launch and flight dynamics of symmetric projectiles[M]. 2nd ed. Atglen: Schiffer Military History, 2012.
|
| [2] |
FARRAR C L, LEEMING D W. Military ballistics: A basic manual[M]. Oxford: Brassey’s Publishers, 1983: 89-90.
|
| [3] |
彭程, 郭洋. 细长体自旋与锥动耦合运动作用下的流动结构研究[J]. 兵工学报, 2018, 39(3): 519-527.
|
|
PENG C, GUO Y. Research on flow field structure of slender spinning missile under coupling of conical and spinning motions[J]. Acta Armamentarii, 2018, 39(3): 519-527 (in Chinese).
|
| [4] |
卢天宇. 超声速下尾翼式旋转弹箭面外力和面外力矩数值研究[D]. 北京: 北京理工大学, 2018: 38-40.
|
|
LU T Y. Numerical study of out-of-plane force and moment for spinning finned projectiles in supersonic flow [D]. Beijing: Beijing Institute of Technology, 2018: 38-40 (in Chinese).
|
| [5] |
YIN J T, JIANG S J, HU Y W, et al. Aerodynamic characteristics and dynamic stability of coning motion of spinning finned projectile in supersonic conditions[J]. Aerospace, 2025, 12(3): 225.
|
| [6] |
BELAIDOUNI H, SAMARDŽIĆ M Đ, JERKOVIĆ D D, et al. Comparison of static aerodynamic data obtained in dynamic wind tunnel tests and numerical simulation research[J]. Tehnicki Vjesnik-Technical Gazette, 2018, 25(2): 445-452.
|
| [7] |
F A, M R S. Effects of Mach numbers on Magnus induced surface pressure[J]. Chinese Journal of Aeronautics, 2020, 33(12): 3058-3072.
|
| [8] |
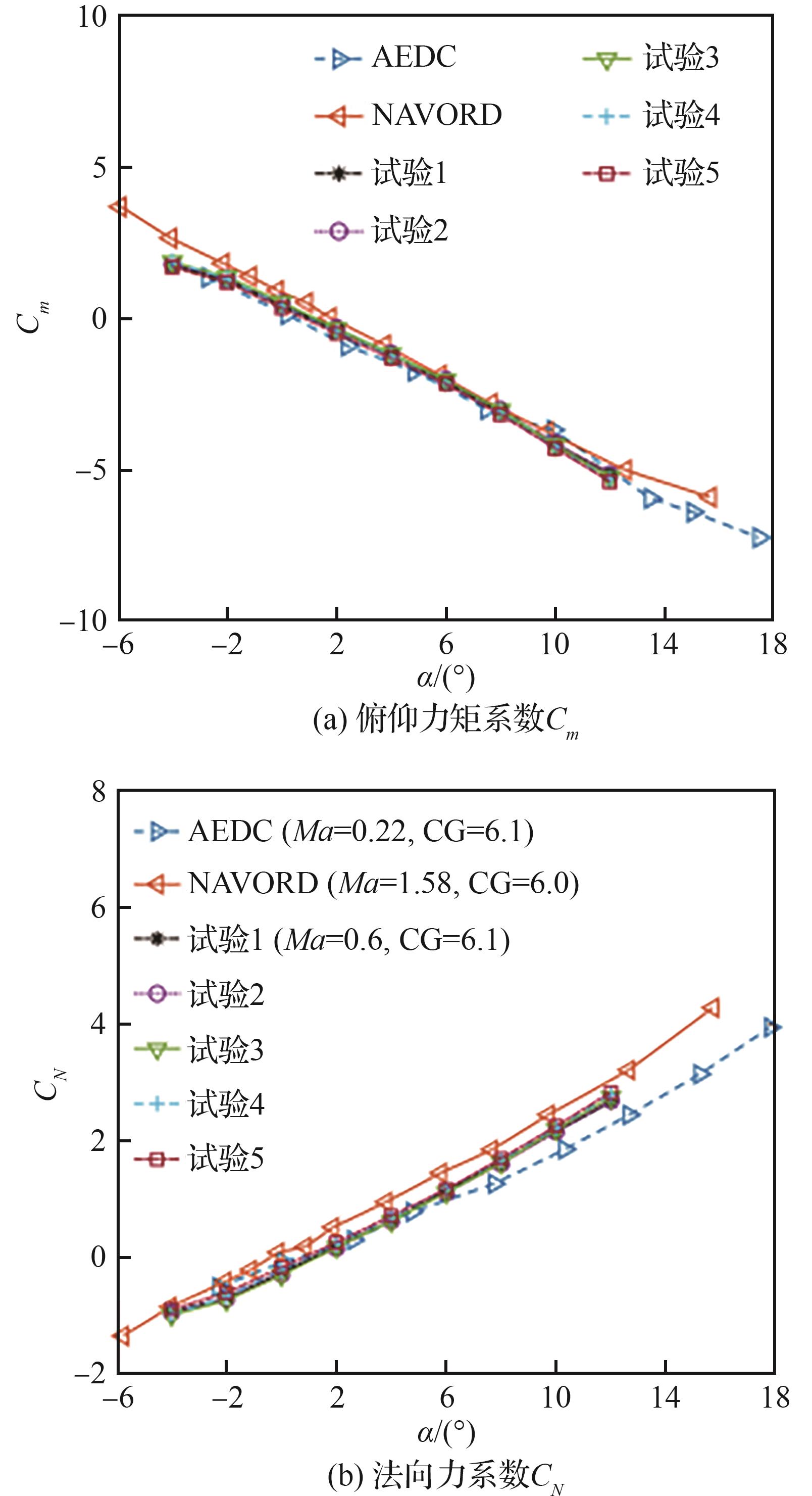
JENKE L M. Experimental roll-damping, Magnus, and static-stability characteristics of two slender missile configurations at high angles of attack (0 to 90 deg) and Mach numbers 0.2 through 2.5: DTIC ADA027027[R]. Tullahoma: Arnold Engineering Development Center, 1976.
|
| [9] |
OH S Y, KIM S C, LEE D K, et al. Magnus and spin-damping measurements of a spinning projectile using design of experiments[J]. Journal of Spacecraft and Rockets, 2010, 47(6): 974-980.
|
| [10] |
SAMARDŽIĆ M, ISAKOVIĆ J, ANASTASIJEVIĆ Z, et al. Apparatus for measurement of pitch and yaw damping derivatives in high Reynolds number blowdown wind tunnel[J]. Measurement, 2013, 46(8): 2457-2466.
|
| [11] |
薛栋, 刘金, 王欢, 等. CG-01高速风洞弹箭模型动稳定性导数实验系统设计[J]. 兵工学报, 2021, 42(11): 2522-2530.
|
|
XUE D, LIU J, WANG H, et al. Design of dynamic derivative test system for projectile/rocket model in high-speed wind tunnel[J]. Acta Armamentarii, 2021, 42(11): 2522-2530 (in Chinese).
|
| [12] |
IGNATYEV D I, KHRABROV A N, KORTUKOVA A I, et al. Interplay of unsteady aerodynamics and flight dynamics of transport aircraft in icing conditions[J]. Aerospace Science and Technology, 2020, 104: 105914.
|
| [13] |
LIU W, ZHOU M D, WEN Z Q, et al. An active damping vibration control system for wind tunnel models[J]. Chinese Journal of Aeronautics, 2019, 32(9): 2109-2120.
|
| [14] |
WANG L X, YANG K, YUE T, et al. Wing-in-ground craft longitudinal modeling and simulation based on a moving wavy ground test[J]. Aerospace Science and Technology, 2022, 126: 107605.
|
| [15] |
CUI Z, LAI G J, WANG Q F, et al. Wind tunnel investigation of different engine layouts of a blended-wing-body transport[J]. Chinese Journal of Aeronautics, 2023, 36(9): 123-132.
|
| [16] |
MAO Y, AGRAWAL S K. Design of a cable-driven arm exoskeleton (CAREX) for neural rehabilitation[J]. IEEE Transactions on Robotics, 2012, 28(4): 922-931.
|
| [17] |
LI D, NAN R D, PAN Z C, et al. The five-hundred-meter aperture spherical radio telescope (FAST) project[J]. International Journal of Modern Physics D, 2011, 20(6): 989-1024
|
| [18] |
LAFOURCADE P, LLIBRE M, REBOULET C. Design of a parallel wire-driven manipulator for wind tunnels[C]∥Proceedings of the Workshop on Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators. Quebec: Laval University, 2002: 187-194.
|
| [19] |
XIAO Y W, LIN Q, ZHENG Y Q, et al. Model aerodynamic tests with a wire-driven parallel suspension system in low-speed wind tunnel[J]. Chinese Journal of Aeronautics, 2010, 23(4): 393-400.
|
| [20] |
PARK K Y, SUNG Y H, HAN J H. Cable suspension and balance system with low support interference and vibration for effective wind tunnel tests[J]. International Journal of Aeronautical and Space Sciences, 2021, 22(5): 1048-1061.
|
| [21] |
吴惠松, 林麒, 柳汀, 等. 风洞虚拟飞行试验模型绳系并联支撑机构[J]. 航空学报, 2022, 43(8): 125758.
|
|
WU H S, LIN Q, LIU T, et al. Wire-driven parallel suspension mechanism of virtual flight test model in wind tunnel[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(8): 125758 (in Chinese).
|
| [22] |
冀洋锋, 林麒, 胡正红, 等. 基于绳系并联机器人支撑系统的SDM动导数试验可行性研究[J]. 航空学报, 2017, 38(11): 121330.
|
|
JI Y F, LIN Q, HU Z H, et al. Research on feasibility of dynamic stability derivatives test of SDM with wire-driven parallel robot suspension system[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(11): 121330 (in Chinese).
|
| [23] |
ZHU Z, SHI L, HE C, et al. Construction and kinematic performance analysis of a suspension support for wind tunnel tests of spinning projectiles based on wire-driven parallel robot with kinematic redundancy[J]. Chinese Journal of Aeronautics, 2024, 37(12): 404-415.
|
| [24] |
MIERMEISTER P, POTT A. Design of cable-driven parallel robots with multiple platforms and endless rotating axes[C]∥Interdisciplinary Applications of Kinematics. Cham: Springer International Publishing, 2015: 21-29.
|
| [25] |
BARBAZZA L, OSCARI F, MINTO S, et al. Trajectory planning of a suspended cable driven parallel robot with reconfigurable end effector[J]. Robotics and Computer-Integrated Manufacturing, 2017, 48: 1-11.
|
| [26] |
JADHAO K S, LAMBERT P, BRUCKMANN T, et al. Design and analysis of a novel cable-driven haptic master device for planar grasping[M]∥Cable-Driven Parallel Robots. Cham: Springer International Publishing, 2017: 307-318.
|
| [27] |
林麒, 何聪, 朱舟. 一种用于旋转弹箭模型风洞动态试验的绳系并联支撑装置和试验系统: CN118936826A[P]. 2024-11-12.
|
|
LIN Q, HE C, ZHU Z. A wire driven parallel support device and test system for wind tunnel dynamic test of spinning projectile models: CN118936826A[P]. 2024-11-12 (in Chinese).
|
| [28] |
林麒, 朱舟. 一种用于闭式风洞试验模型悬挂支撑装置的滑轮组件、风洞试验模型的支撑装置和风洞试验装置: CN117824978A[P]. 2024-04-05.
|
|
Lin Q, Zhu Z. A pulley assembly for suspension support device of test model for closed wind tunnel, support device and wind tunnel test device for wind tunnel test model: China CN117824978A[P]. 2024-04-05 (in Chinese).
|
| [29] |
林麒, 师璐, 殷春平, 等. 一种闭式风洞试验中悬挂旋成体飞行器的位姿测试方法: CN118817227A[P]. 2024-10-22.
|
|
LIN Q, SHI L, YIN C P, et al. A pose test method for suspended spinning body aircraft in closed wind tunnel test: China CN118817227A[P]. 2024-10-22 (in Chinese).
|
| [30] |
韩子鹏. 弹箭外弹道学[M]. 北京: 北京理工大学出版社, 2014: 165-166.
|
|
HAN Z P. Exterior ballistics of projectiles and rockets[M]. Beijing: Beijing Institute of Technology Press, 2014: 165-166 (in Chinese).
|
| [31] |
杨树兴, 赵良玉, 闫晓勇. 旋转弹动态稳定性理论[M]. 北京: 国防工业出版社, 2014: 18-87.
|
|
YANG S X, ZHAO L Y, YAN X Y. Dynamic stability of spinning missiles[M]. Beijing: National Defense Industry Press, 2014: 18-87 (in Chinese).
|
| [32] |
钱杏芳, 林瑞雄, 赵亚男. 导弹飞行力学[M]. 北京: 北京理工大学出版社, 2000: 16-265.
|
|
QIAN X F, LIN R X, ZHAO Y N. Missile flight mechanics[M]. Beijing: Beijing Institute of Technology Press, 2000: 16-265 (in Chinese).
|
| [33] |
SCHIFF L B, TOBAK M. Results from a new wind-tunnel apparatus for studying coning and spinning motions of bodies of revolution[J]. AIAA Journal, 1970, 8(11): 1953-1957.
|
| [34] |
SHANTZ I, GROVES R T. Dynamic and static stability measurements of the basic finner at supersonic speeds[R]. Silver Spring: U.S. Naval Ordnance Laboratory, 1960.
|
| [35] |
李周复. 风洞试验手册[M]. 北京: 航空工业出版社, 2015: 390-410.
|
|
LI Z F. Handbook of wind tunnel test[M]. Beijing: Aviation Industry Press, 2015: 390-410 (in Chinese).
|
 ), 何聪, 师璐, 詹磊, 沈楚伦, 韩东博
), 何聪, 师璐, 詹磊, 沈楚伦, 韩东博