陈秋实1, 高精隆1( ), 王萌1, 边文昆2, 韩昊峻1
), 王萌1, 边文昆2, 韩昊峻1
收稿日期:2025-01-13
修回日期:2025-02-12
接受日期:2025-03-18
出版日期:2025-04-01
发布日期:2025-03-31
通讯作者:
高精隆
E-mail:gao_jinglong@126.com
基金资助:
Qiushi CHEN1, Jinglong GAO1(), Meng WANG1, Wenkun BIAN2, Haojun HAN1
Received:2025-01-13
Revised:2025-02-12
Accepted:2025-03-18
Online:2025-04-01
Published:2025-03-31
Contact:
Jinglong GAO
E-mail:gao_jinglong@126.com
Supported by:摘要:
无人机技术的迅猛发展促使其在军事、民用等领域应用不断拓展,逐渐成为推动低空经济发展的强劲引擎。其中,卫星导航系统是为无人机提供精准定位与导航信息的核心器件,然而,由于卫星导航系统的脆弱性,常面临复杂电磁环境带来的严峻挑战,致使无人机失去定位能力或偏离预定航线,严重威胁飞行安全和任务成功率。为此,系统地梳理了无人机卫星导航系统抗干扰技术的研究现状。首先,从无人机面临的主要导航干扰入手,深入剖析了压制干扰和欺骗干扰对无人机导航系统的影响。其次,详细归纳总结了无人机卫星导航终端的抗干扰方法。针对抗压制干扰,重点探讨了接收天线端、射频前端和信号处理端的技术进展,在抗欺骗干扰方面,分析了增强接收处理能力和采用先进算法检测抑制欺骗干扰的方法。此外,还研究了拒止环境下无人机导航抗干扰方法,包括惯性导航、视觉导航、天文导航、超宽带定位导航、磁场导航、雷达导航以及多信息融合导航技术等。并且针对多无人机集群编队导航,探讨了机间协同抗干扰和系统改进抗干扰的方法,以提升整个无人机群体的抗干扰能力。同时,进一步指出目前面临的问题,展望未来研究趋势及技术发展方向。
中图分类号:
陈秋实, 高精隆, 王萌, 边文昆, 韩昊峻. 无人机卫星导航系统抗干扰技术综述[J]. 航空学报, 2025, 46(17): 331797.
Qiushi CHEN, Jinglong GAO, Meng WANG, Wenkun BIAN, Haojun HAN. Overview of anti-interference technology of unmanned aerial vehicle satellite navigation system[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331797.

图 1
多类型无人机应用场景举例[3-6]


图 2
卫星导航系统主要抗干扰技术
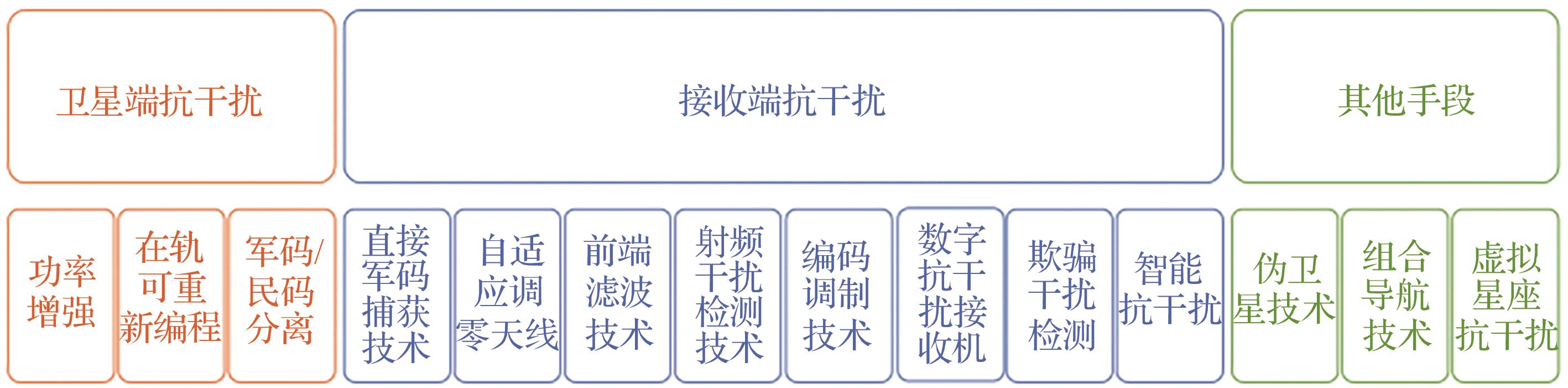
图 3
导航干扰源的主要类型
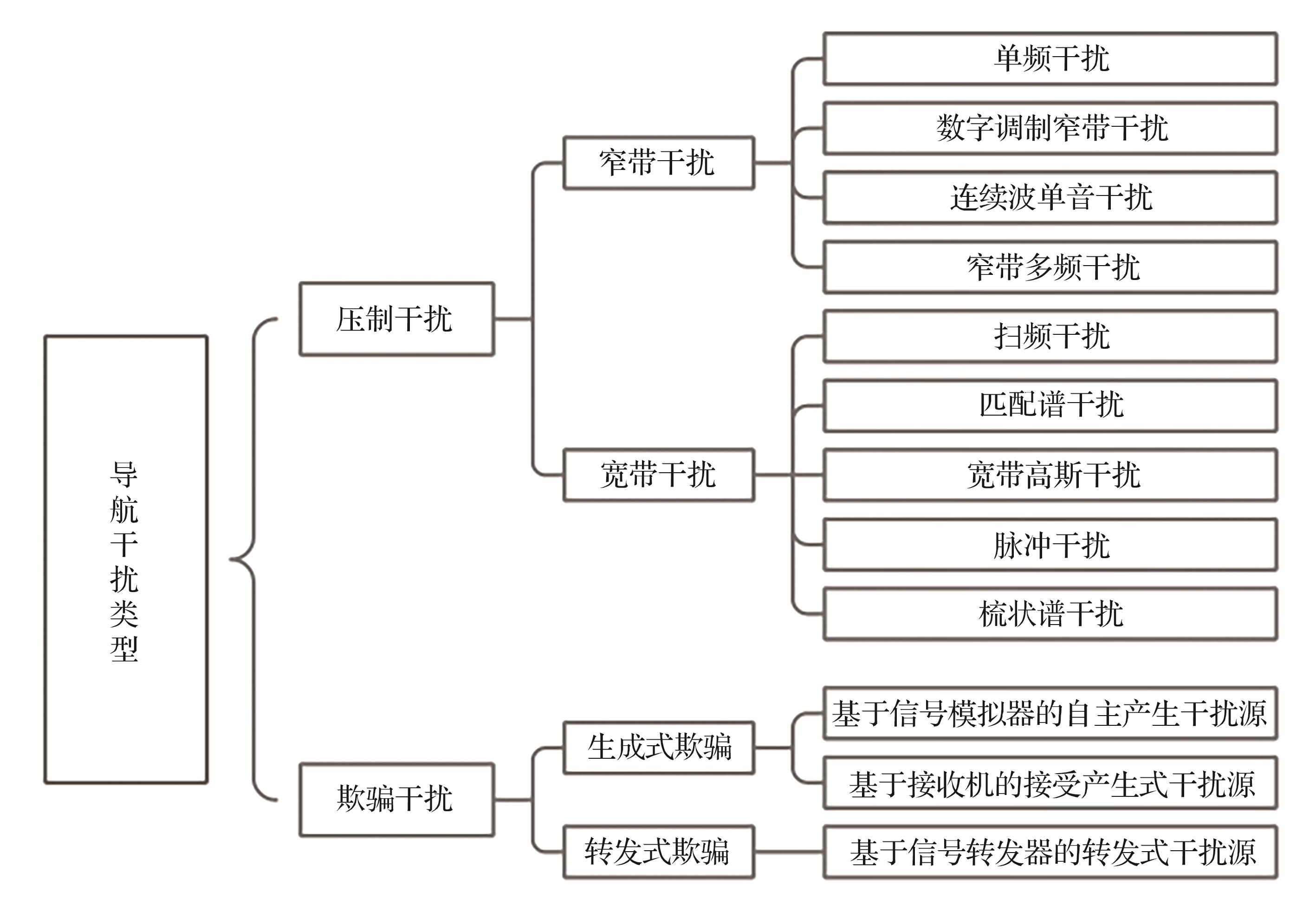
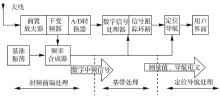
图 4
卫星导航接收终端结构及信号处理流程[29]
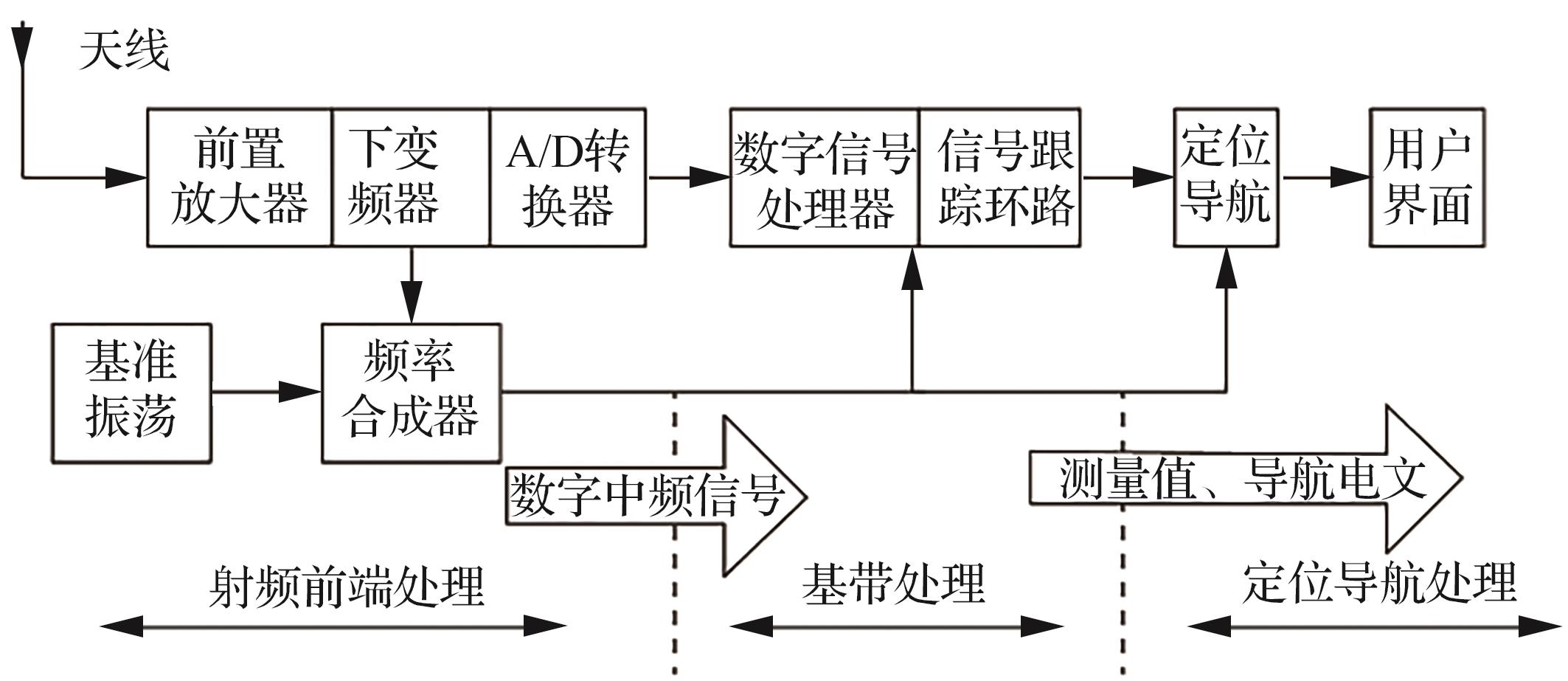

图 5
多阵元抗干扰天线设计[30-32,34-37]

图 6
前端滤波抗干扰技术案例[44-48]
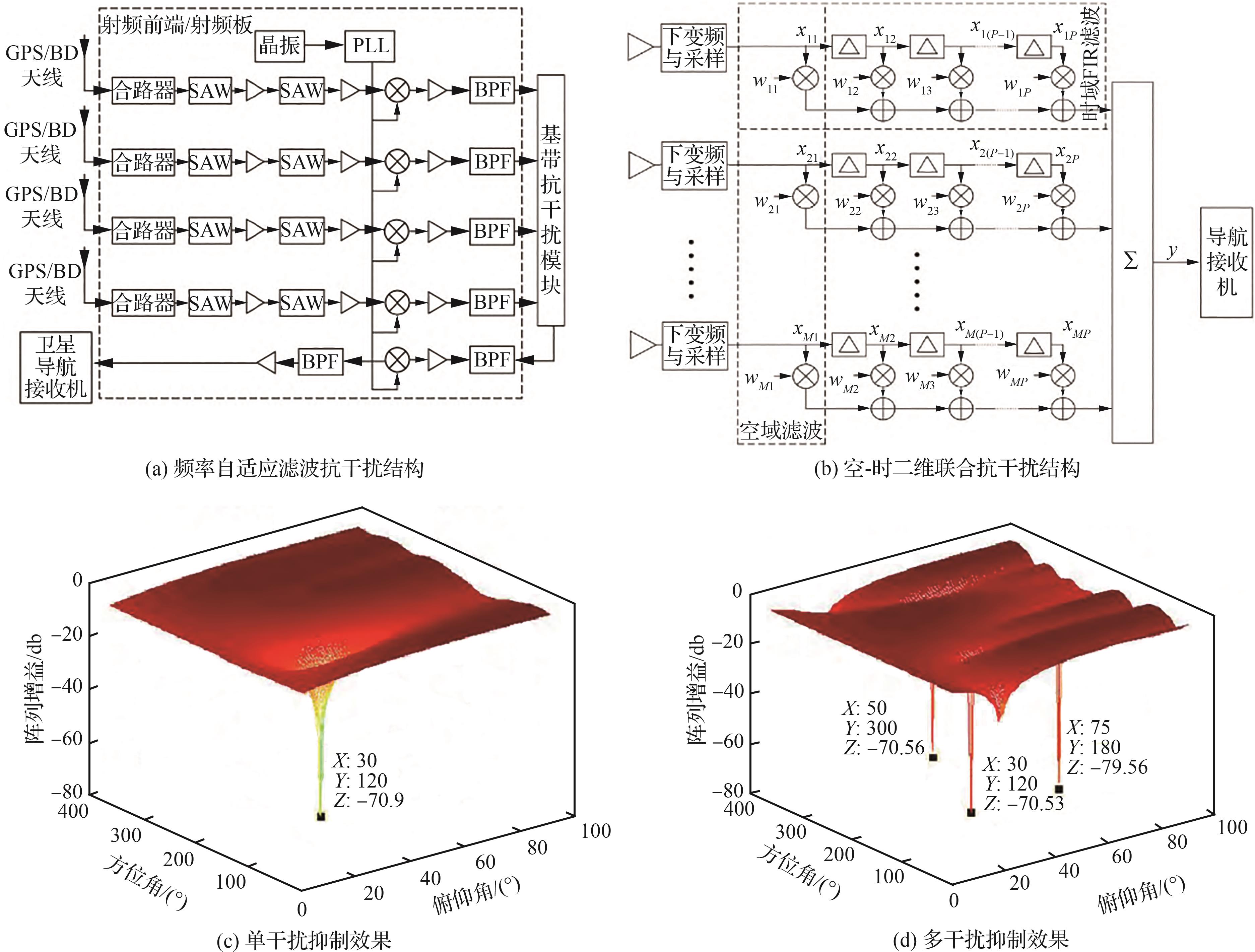
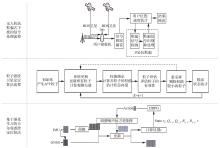
图 7
先进信号处理抗干扰方法案例[51,53-55]
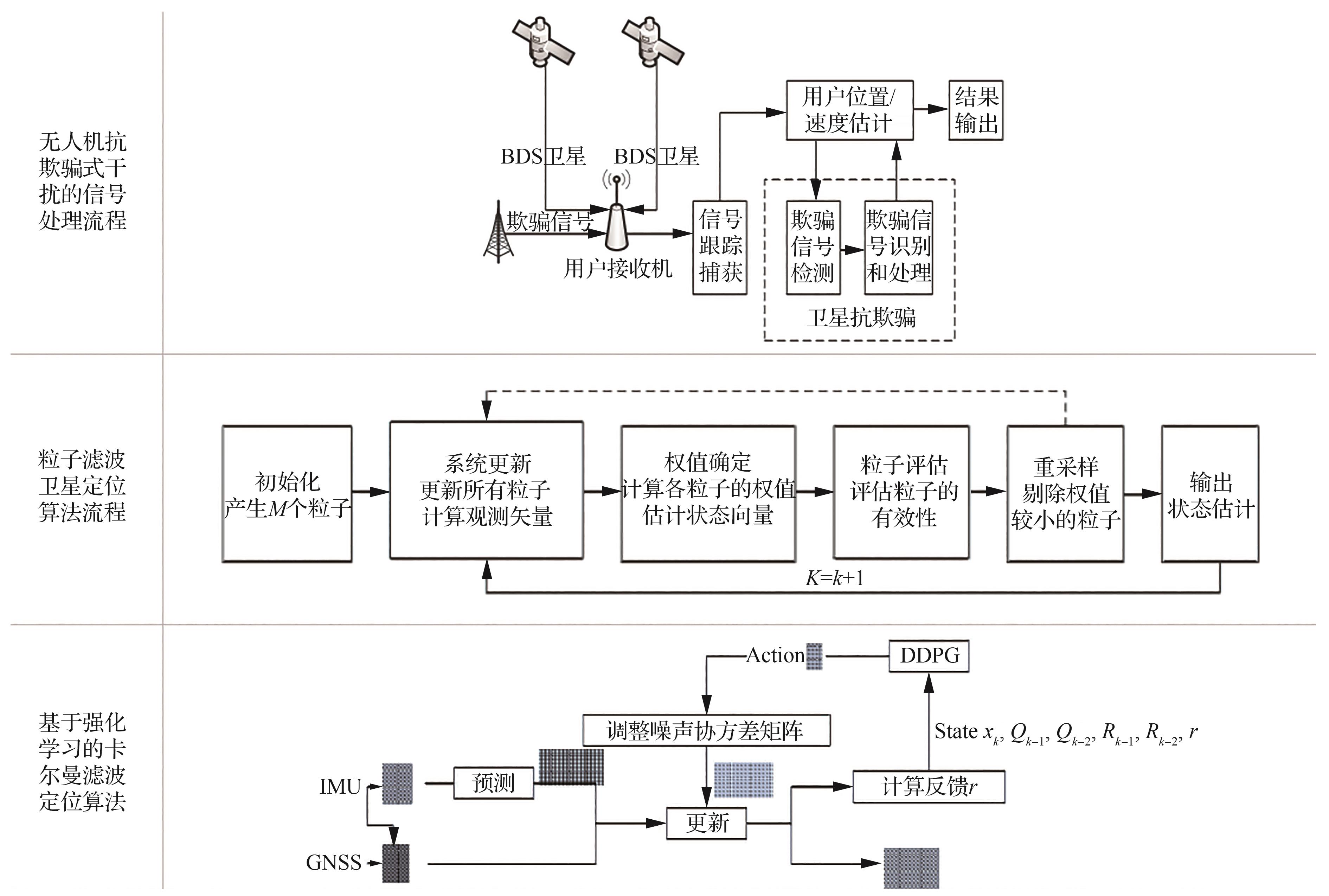
表 1
无人机导航接收端主要抗干扰技术对比分析
| 干扰类型 | 方法分类 | 主要技术 | 性能特点 | 核心优势 | 主要局限 | 文献 |
|---|---|---|---|---|---|---|
| 接收端抗压制干扰方法 | 接收天线端抗干扰技术 | 自适应调零天线技术、波束形成技术、空时自适应信号处理 | 通过天线阵列和处理器调节干扰源方向增益,在天线方向图中产生零点,抑制干扰信号 | 抗干扰能力强,适用于低计算能力的无人机 | 天线尺寸和重量限制,机载应用受限;设计实现复杂度较高 | [ |
| 射频前端抗干扰技术 | 带通滤波器、放大器、混频器、自动增益控制器、模数转换器;时域自适应滤波、频域滤波、空域滤波、变换域滤波;射频干扰检测技术 | 完成射频信号调整、下变频混频、中频信号滤波放大和模数转换;通过滤波技术抑制干扰信号;检测干扰信号并调整接收机参数 | 有效抑制干扰信号,提高信号质量;适用于多种类型的干扰 | 对干扰带宽不敏感,难以抑制宽带干扰;对硬件要求较高 | [ | |
| 信号处理抗干扰技术 | 基带信号处理,包括信号捕获和跟踪、导航定位解算;变换域抗干扰;机器学习和人工智能技术 | 通过算法处理基带信号,抑制干扰信号;利用智能算法识别和抑制干扰 | 算法多样,适应性强;智能识别和抑制干扰信号,提高导航精度 | 计算复杂度高,对硬件要求高;实时性要求高,算法实现复杂 | [ | |
| 接收端抗欺骗干扰方法 | 增强接收处理能力 | 高性能接收器和天线 | 提高信号接收灵敏度和动态范围 | 提高抗欺骗能力,增强导航系统鲁棒性 | 对复杂环境适应性有限,部分方法尚未充分验证 | [ |
| 多传感器融合技术 | 惯性测量单元、视觉传感器等 | 整合多种传感器数据,提高导航系统鲁棒性 | 减少传感器噪声或突发干扰引起的误差,确保精确可靠 | 计算复杂度高,对硬件要求高 | [ | |
| 先进检测抑制算法 | 基于创新粒子滤波的预测误差算法、信号功率异常检测和多普勒频移检测的算法等 | 检测并抑制欺骗信号,降低对导航系统的影响 | 能够高效、准确地检测出欺骗信号,提高导航精度 | 对干扰信号的特征和类型识别要求高,算法实现复杂 | [ |

图 8
惯性/视觉/雷达等无人机自主导航系统及其组合应用
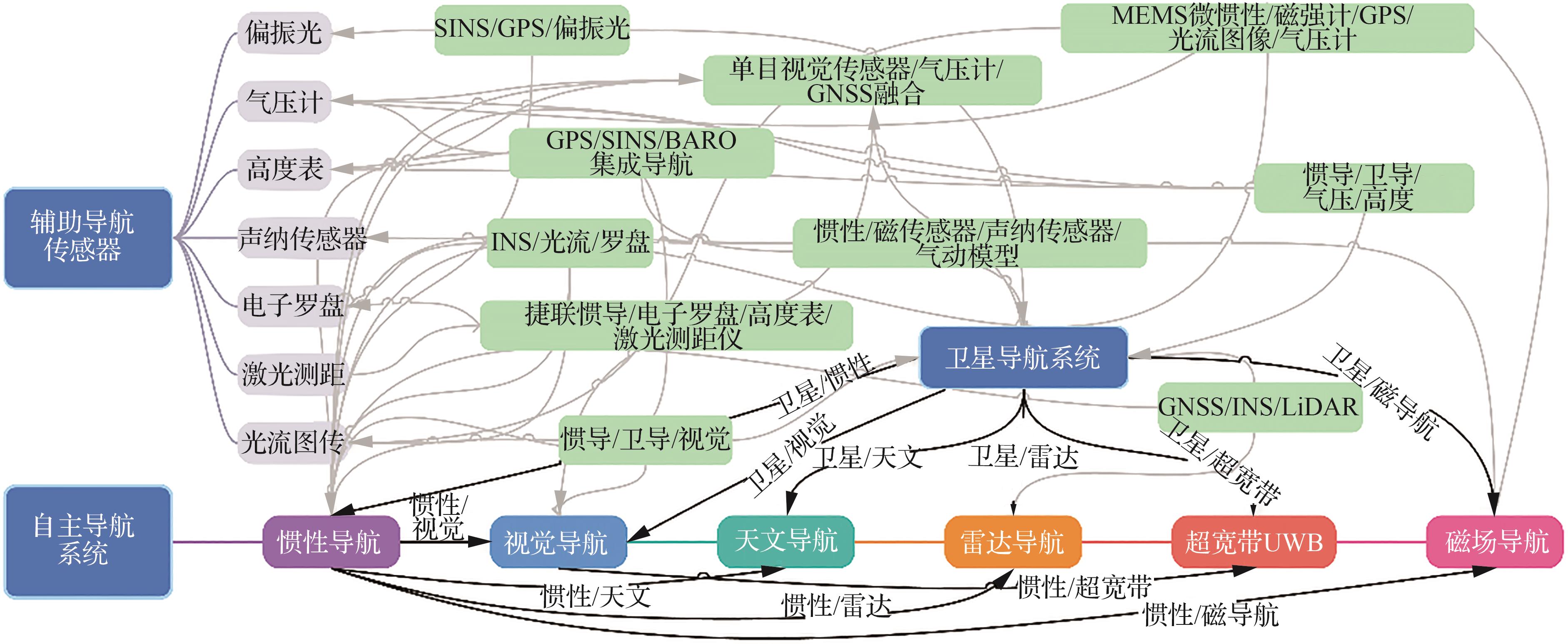
表 2
拒止环境下无人机采用的多源组合导航技术对比分析
| 分类 | 技术类型 | 传感器 | 技术方法 | 适用场景 | 核心优势 | 主要局限 | 文献 |
|---|---|---|---|---|---|---|---|
| 单一传感器技术 | 惯性导航 | 惯性器件独立使用 | 卡尔曼滤波、粒子滤波 | 短时高动态环境 | 完全自主、无外部依赖 | 累积误差显著、成本高、需定期校准 | [ |
| 视觉导航 | 单目/双目摄像头 | 扩展卡尔曼滤波、光束法平差 | 无人机避障/着陆/室内场景等 | 厘米级定位精度、支持环境感知与避障 | 受光照影响大、算力要求高 | [ | |
| 超宽带定位导航 | UWB基站+标签 | 粒子群优化 | 短距离室内/工业场景 | 抗多径干扰、厘米级精度 | 需预部署基站、覆盖范围小 | [ | |
| 天文导航 | 星敏感器件 | 星光折射定位算法 | 高空长航时任务 | 全球覆盖、抗干扰性强 | 初始化时间长、依赖天气条件、动态性能受限 | [ | |
| 磁场导航 | 磁传感器 | 地磁匹配算法 | 海洋/无显著地标区域 | 隐蔽性好、无额外硬件需求 | 地磁场易受干扰、数据库更新要求高 | [ | |
| 雷达导航 | 激光雷达 | SLAM、扩展卡尔曼滤波 | 复杂三维环境建模 | 高精度点云、支持实时建图 | 成本高、恶劣天气性能下降 | [ | |
| 两系统组合技术 | INS+视觉 | 惯性单元+摄像头 | 紧耦合滤波、因子图优化 | 城市峡谷/动态障碍环境 | 误差互补(视觉修正惯性漂移) | 复杂场景建图耗时 | [ |
| INS+UWB | 惯性单元+UWB | 联邦卡尔曼滤波 | 地下矿井/封闭空间 | 抑制惯性累积误差、提升长时稳定性 | UWB基站部署成本高 | [ | |
| 视觉+LiDAR | 摄像头+激光雷达 | 激光SLAM+视觉里程计 | 三维复杂环境 | 高精度点云+视觉语义信息融合 | 硬件成本高、功耗大 | [ | |
| 多传感器融合技术 | INS+视觉+气压计 | 惯性单元+摄像头+气压高度计 | 无迹卡尔曼滤波(UKF) | 城市低空飞行 | 高度稳定性强、适应建筑遮挡 | 气压计易受天气干扰 | [ |
| GNSS/INS/LiDAR | 卫星导航+惯性单元+激光雷达 | 紧耦合SLAM+鲁棒滤波 | 军事侦察/野外搜救 | 多源冗余抗干扰、支持无地图导航 | 系统复杂度极高、需专用计算单元 | [ | |
| 惯性/磁/声纳/气动模型 | 惯性单元+磁强计+声纳+气动参数 | 多模态传感器融合架构 | 水下无人机/室内自主飞行 | 全自主性、适应极端拒止环境 | 算法调试复杂、实时性挑战 | [ | |
| SINS/GPS/偏振光 | 惯性导航+卫星导航+偏振光传感器 | 多目标优化抗干扰滤波 | 沙漠/强电磁干扰区域 | 偏振光辅助定向、抗欺骗干扰 | 偏振光数据库构建难度大 | [ | |
| 仿生组合技术 | 仿生偏振光+惯性 | 仿生偏振光传感器+微惯性单元 | 生物启发式滤波 | 无地标空旷区域 | 仿昆虫导航机制、低功耗 | 技术成熟度低、实际验证不足 | [95,83] |
| [1] | 宋志勇. 高质量发展通用航空和低空经济[EB/OL].(2025-01-03)[2025-07-15]. . |
| SONG Z Y. High-quality development of general aviation and low-altitude economy[EB/OL]. (2025-01-03)[2025-07-15]. (in Chinese). | |
| [2] | 王俊潼, 包丹文, 周佳怡, 等 .低空空域规划研究现状与展望[J].航空学报, 2025, 46(11): 530879. |
| WANG J T, BAO D W, ZHOU J Y, et al. Low-altitude airspace planning studies: A review and prospect[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 530879 (in Chinese). | |
| [3] | 张依铭, 邓凌锋, 王邓. 无人机在军事领域的发展[J]. 科技视界, 2024(4): 38-41. |
| ZHANG Y M, DENG L F, WANG D. Development of UAV in military field[J]. Science & Technology Vision, 2024(4): 38-41 (in Chinese). | |
| [4] | KHAN S Z, MOHSIN M, IQBAL W. On GPS spoofing of aerial platforms: A review of threats, challenges, methodologies, and future research directions[J]. PeerJ Computer Science, 2021, 7: e507. |
| [5] | 陈玺光, 王尔申, 任旭, 等. 基于北斗导航的无人机系统设计[J]. 电子器件, 2021, 44(5): 1248-1253. |
| CHEN X G, WANG E S, REN X, et al. Design of UAV system based on BeiDou navigation[J]. Chinese Journal of Electron Devices, 2021, 44(5): 1248-1253 (in Chinese). | |
| [6] | 陈高鹏. 北斗卫星导航系统在无人机系统中的应用及发展趋势[J]. 自动化应用, 2022(9): 52-54. |
| CHEN G P. Application and development trend of Beidou satellite navigation system in UAV system[J]. Automation Application, 2022(9): 52-54 (in Chinese). | |
| [7] | 郝雅楠, 祝彬, 朱华桥. 全球卫星导航系统发展现状与特点分析[J]. 国防科技工业, 2020(7): 20-24. |
| HAO Y N, ZHU B, ZHU H Q. Analysis on the development status and characteristics of global satellite navigation system[J]. Defence Science & Technology Industry, 2020(7): 20-24 (in Chinese). | |
| [8] | 搜狐新闻. 西安千架无人机表演失败被爆遭干扰[EB/OL]. (2018-06-03)[2025-07-16]. . |
| News Sohu. A thousand drones in Xi’an failed to perform and were disrupted[EB/OL]. (2018-06-03)[2025-07-16]. (in Chinese). | |
| [9] | 北京交通广播. 表演中失控!大量无人机为何“集体”坠落?[EB/OL]. (2024-12-10)[2025-07-16]. . |
| Beijing Traffic Broadcasting. Lost control during the performance! Why did a large number of drones “collectively” crash?[EB/OL]. (2024-12-10)[2025-07-16]. (in Chinese). | |
| [10] | 快科技. 郑州无人机表演时突发故障坠落[EB/OL]. (2021-10-02)[2025-07-16]. . |
| Fast Science and Technology. Zhengzhou UAV performed emergency fault fall[EB/OL]. (2021-10-02)[2025-07-16]. (in Chinese). | |
| [11] | 辛洁, 章林锋, 李晓杰, 等. 俄乌冲突下的导航信号受扰分析[J]. 导航定位学报, 2023, 11(2): 196-202. |
| XIN J, ZHANG L F, LI X J, et al. Analysis of navigation jamming in conflict between Russia and Ukraine[J]. Journal of Navigation and Positioning, 2023, 11(2): 196-202 (in Chinese). | |
| [12] | BORIO D, GIOIA C. GNSS interference mitigation: A measurement and position domain assessment[J]. Navigation, 2021, 68(1): 93-114. |
| [13] | 杨卫平. 新一代飞行器导航制导与控制技术发展趋势[J]. 航空学报, 2024, 45(5): 529720. |
| YANG W P. Development trend of navigation guidance and control technology for new generation aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529720 (in Chinese). | |
| [14] | 朱明峰, 秦昕, 游敬云. 卫星导航抗干扰技术及其发展趋势[J]. 航天电子对抗, 2021, 37(6): 61-64. |
| ZHU M F, QIN X, YOU J Y. The anti-jamming technology of satellite navigation and its development tendency[J]. Aerospace Electronic Warfare, 2021, 37(6): 61-64 (in Chinese). | |
| [15] | 薛连莉, 尹晓桐, 沈玉芃, 等. 美国《国防部定位、导航与授时体系战略》报告解析[J]. 飞航导弹, 2020(4): 82-89. |
| XUE L L, YIN X T, SHEN Y P, et al. Analysis of the U.S. Department of Defense positioning, navigation and timing system strategy report[J]. Aerodynamic Missile Journal, 2020(4): 82-89 (in Chinese). | |
| [16] | 王新怀. 卫星导航抗干扰接收系统技术研究[D]. 西安: 西安电子科技大学, 2010. |
| WANG X H. Research on Anti-jamming receiving System for satellite navigation [D]. Xi’an: Xidian University, 2010 (in Chinese). | |
| [17] | YAN D S, NI S Y. Overview of anti-jamming technologies for satellite navigation systems[C]∥2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC). Piscataway: IEEE Press, 2022: 118-124. |
| [18] | LUO X Q, LV J W. A design of multi-element anti-jamming GPS antenna[J]. Recent Advances in Electrical & Electronic Engineering, 2021, 14(3): 325-338. |
| [19] | 黄龙, 吕志成, 王飞雪. 针对卫星导航接收机的欺骗干扰研究[J]. 宇航学报, 2012, 33(7): 884-890. |
| HUANG L, LV Z C, WANG F X. Spoofing pattern research on GNSS receivers[J]. Journal of Astronautics, 2012, 33(7): 884-890 (in Chinese). | |
| [20] | 倪淑燕, 陈世淼, 付琦玮, 等. 卫星导航欺骗干扰检测与抑制技术综述[J]. 电讯技术, 2024, 64(5): 812-820. |
| NI S Y, CHEN S M, FU Q W, et al. Review on spoofing detection and mitigation of satellite navigation[J]. Telecommunication Engineering, 2024, 64(5): 812-820 (in Chinese). | |
| [21] | 彭少磊. 卫星导航干扰与抗干扰技术研究综述[J]. 科技与创新, 2023(15): 122-124. |
| PENG S L. Research review on jamming and anti-jamming technology of satellite navigation[J]. Science and Technology Innovation, 2023(15): 122-124 (in Chinese). | |
| [22] | NORHASHIM N, MOHD KAMAL N L, SAHWEE Z, et al. The effects of jamming on global positioning system (GPS) accuracy for unmanned aerial vehicles (UAVs)[C]∥2022 International Conference on Computer and Drone Applications (IConDA). Piscataway: IEEE Press, 2022: 18-22. |
| [23] | ALEXANDRE V, NEL S, THIERRY T. Influence of GNSS spoofing on drone in automatic flight mode[C]∥2017 4th International Symposium of Navigation and Timing. Toulouse: ITSNT, 2017. |
| [24] | SEO S H, LEE B H, IM S H, et al. Effect of spoofing on unmanned aerial vehicle using counterfeited GPS signal[J]. Journal of Positioning, Navigation, and Timing, 2015, 4(2): 57-65. |
| [25] | MENDES D, IVAKI N, MADEIRA H. Effects of GPS spoofing on unmanned aerial vehicles[C]∥2018 IEEE 23rd Pacific Rim International Symposium on Dependable Computing (PRDC). Piscataway: IEEE Press, 2018: 155-160. |
| [26] | RANYAL E, JAIN K. Unmanned aerial vehicle’s vulnerability to GPS spoofing a review[J]. Journal of the Indian Society of Remote Sensing, 2021, 49(3): 585-591. |
| [27] | NOVÁK A, KOVÁČIKOVÁ K, KANDERA B, et al. Global navigation satellite systems signal vulnerabilities in unmanned aerial vehicle operations: Impact of affordable software-defined radio[J]. Drones, 2024, 8(3): 109. |
| [28] | 李畅, 王旭东. 基于轨迹欺骗的无人机GPS/INS复合导航系统干扰技术[J]. 南京航空航天大学学报, 2017, 49(3): 420-427. |
| LI C, WANG X D. Jamming of unmanned aerial vehicle with GPS/INS integrated navigation system based on trajectory cheating[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2017, 49(3): 420-427 (in Chinese). | |
| [29] | 杨春燕. 卫星导航技术与应用[M]. 西安: 陕西科学技术出版社, 2023: 107-118. |
| YANG C Y. Satellite navigation technology and application[M]. Xi’an: Shaanxi Science & Technology Press, 2023: 107-118 (in Chinese). | |
| [30] | 周琪辉. 北斗抗干扰天线前端技术研究[D]. 成都: 电子科技大学, 2023. |
| ZHOU Q H. Research on anti-interference antenna front-end technology of Beidou[D]. Chengdu: University of Electronic Science and Technology of China, 2023 (in Chinese). | |
| [31] | LU Z K, CHEN F Q, XIE Y C, et al. High precision pseudo-range measurement in GNSS anti-jamming antenna array processing[J]. Electronics, 2020, 9(3): 412. |
| [32] | LU Z K, NIE J W, WAN Y D, et al. Optimal reference element for interference suppression in GNSS antenna arrays under channel mismatch[J]. IET Radar, Sonar & Navigation, 2017, 11(7): 1161-1169. |
| [33] | 党明杰. 自适应调零天线技术在组合导航抗干扰中的应用[J]. 全球定位系统, 2008, 33(3): 32-36. |
| DANG M J. Application of adaptive nulling antenna in integrated guidance anti-jamming[J]. GNSS World of China, 2008, 33(3): 32-36 (in Chinese). | |
| [34] | 李津, 李鹏程, 刘博, 等. 基于调零天线的无人机抗导航干扰方法[J]. 现代电子技术, 2023, 46(5): 25-28. |
| LI J, LI P C, LIU B, et al. UAV anti-navigation jamming method based on nulling antenna[J]. Modern Electronics Technique, 2023, 46(5): 25-28 (in Chinese). | |
| [35] | 马昌林. 基于空时处理的无人机协作导航抗干扰研究[D]. 西安: 西安电子科技大学, 2015. |
| MA C L. Research on anti-jamming of UAV cooperative navigation based on space-time processing[D]. Xi’an: Xidian University, 2015 (in Chinese). | |
| [36] | REZAZADEH N, SHAFAI L. A compact antenna for GPS anti-jamming in airborne applications[J]. IEEE Access, 2019, 7: 154253-154259. |
| [37] | 李宁, 刘广泉, 王长林, 等. 四阵元B 1/L1低重量低功耗卫星抗干扰天线及实现方法: CN111624629A[P]. 2020-09-04. |
| LI N, LIU G Q, WANG C L, et al. Four-array B 1/L1 low-weight and low-power satellite anti-interference an-tenna and its implementation method: CN111624629A [P]. 2020-09-04 (in Chinese). | |
| [38] | 刘世界. 浅谈卫星导航抗干扰技术的发展[J]. 电子世界, 2012(22): 17. |
| LIU S J. Discussion on the development of anti-jamming technology of satellite navigation[J]. Electronics World, 2012(22): 17 (in Chinese). | |
| [39] | LUO X Q, LV J W. A design of multi-element anti-jamming GPS antenna[J]. Recent Advances in Electrical & Electronic Engineering, 2021, 14(3): 325-338. |
| [40] | LI F S, WANG W Y, LU D, et al. Satellite navigation anti-jamming algorithm based on extended array[C]∥China Satellite Navigation Conference (CSNC) 2015 Proceedings: Volume Ⅰ. Berlin: Springer Berlin Heidelberg, 2015: 773-781. |
| [41] | 孙彦景, 陈功骁, 张亮, 等. 无人机导航信号的增强及干扰抑制技术[J]. 深圳大学学报(理工版), 2019, 36(5): 482-488. |
| SUN Y J, CHEN G X, ZHANG L, et al. UAV navigation signal enhancement and jamming mitigation[J]. Journal of Shenzhen University (Science and Engineering), 2019, 36(5): 482-488 (in Chinese). | |
| [42] | 岳长松, 潘耀鹏, 韦志棉. 无人机导航系统抗干扰措施[J]. 安全与电磁兼容, 2010(5): 52-54. |
| YUE C S, PAN Y P, WEI Z M. Solutions for improving immunity of UAV navigation system[J]. Safety & EMC, 2010(5): 52-54 (in Chinese). | |
| [43] | 魏涛, 杨祖芳, 潘伟, 等. GPS天线阵抗干扰射频前端设计[J]. 电子技术应用, 2018, 44(5): 119-123. |
| WEI T, YANG Z F, PAN W, et al. Antenna array anti-jamming RF front-end of GPS[J]. Application of Electronic Technique, 2018, 44(5): 119-123 (in Chinese). | |
| [44] | 蔡翔. 七阵元导航自适应抗干扰算法及其FPGA实现[D]. 海口: 海南大学, 2022. |
| CAI X. Seven-array navigation adaptive anti-jamming algorithm and its FPGA implementation[D]. Haikou: Hainan University, 2022 (in Chinese). | |
| [45] | 王晓君, 黄玲, 包莉娜. 一种单星约束的空时自适应抗干扰算法[J]. 导航定位学报, 2015, 3(2): 57-61. |
| WANG X J, HUANG L, Bao L N. Research on space-time adaptive anti-interference algorithm of per-satellite constraint[J]. Journal of Navigation and Positioning, 2015, 3(02): 57-61 (in Chinese). | |
| [46] | 王剑飞, 吴建军, 吴利刚, 等. 无人机导航抗干扰接收机射频前端设计[J]. 工业仪表与自动化装置, 2023(2): 107-111. |
| WANG J F, WU J J, WU L G, et al. RF front end design of UAV navigation anti jamming receiver[J]. Industrial Instrumentation & Automation, 2023(2): 107-111 (in Chinese). | |
| [47] | WANG F, ZHANG C F, SUN H J. Research on the space-time anti-jamming algorithm for satellite navigation receiver[C]∥2019 2nd International Conference on Information Systems and Computer Aided Education (ICISCAE). Piscataway: IEEE Press, 2019: 617-621. |
| [48] | 吴星. 卫星导航终端的空时二维抗干扰算法的研究[D]. 哈尔滨: 哈尔滨工程大学, 2019. |
| WU X. Research on space-time two-dimensional anti-jamming algorithm of satellite navigation terminal[D]. Harbin: Harbin Engineering University, 2019 (in Chinese). | |
| [49] | 赵洁, 史孝华, 石芳, 等. 基于北斗系统的无人机载抗干扰接收装置研究[J]. 通讯世界, 2021(12): 127-129. |
| ZHAO J, SHI X H, SHI F, et al. Research on anti-interference receiving device of UAV based on Beidou system[J]. Telecom World, 2021(12): 127-129 (in Chinese). | |
| [50] | 宋捷, 鲁祖坤, 刘哲, 等. 卫星导航时域自适应抗干扰技术综述[J]. 系统工程与电子技术, 2023, 45(4): 1164-1176. |
| SONG J, LU Z K, LIU Z, et al. Review on the time-domain interference suppression of navigation receiver[J]. Systems Engineering and Electronics, 2023, 45(4): 1164-1176 (in Chinese). | |
| [51] | 罗浩航. GNSS干扰环境下的无人机定位修正及路由研究[D]. 绵阳: 西南科技大学, 2023. |
| LUO H H. Research on UAV location correction and routing in GNSS jamming environment[D]. Mianyang: Southwest University of Science and Technology, 2023 (in Chinese). | |
| [52] | ALREFAEI F, ALZAHRANI A, SONG H B, et al. A survey on the jamming and spoofing attacks on the unmanned aerial vehicle networks[C]∥2022 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS). Piscataway: IEEE Press, 2022: 1-7. |
| [53] | 边少锋, 胡彦逢, 纪兵. GNSS欺骗防护技术国内外研究现状及展望[J]. 中国科学: 信息科学, 2017, 47(3): 275-287. |
| BIAN S F, HU Y F, JI B. Research status and prospect of GNSS anti-spoofing technology[J]. Scientia Sinica (Informationis), 2017, 47(3): 275-287 (in Chinese). | |
| [54] | MAJIDI M, ERFANIAN A, KHALOOZADEH H. Prediction-discrepancy based on innovative particle filter for estimating UAV true position in the presence of the GPS spoofing attacks[J]. IET Radar, Sonar & Navigation, 2020, 14(6): 887-897. |
| [55] | 周斌, 王秀境, 肖建华, 等. 基于粒子滤波器模型的无人机北斗抗欺骗式干扰技术[J]. 电力信息与通信技术, 2022, 20(12): 18-24. |
| ZHOU B, WANG X J, XIAO J H, et al. Anti-spoofing technology of BDS in UAV based on particle filter model[J]. Electric Power Information and Communication Technology, 2022, 20(12): 18-24 (in Chinese). | |
| [56] | 吕日毅, 钱仁军, 李超, 等. 无人机抗干扰防诱骗技术分析[J]. 飞机设计, 2024, 44(1): 24-29. |
| LYU R Y, QIAN R J, LI C, et al. Analysis on anti-jamming and anti-deception technology of UAV[J]. Aircraft Design, 2024, 44(1): 24-29 (in Chinese). | |
| [57] | LIANG C, MIAO M X, MA J F, et al. Detection of global positioning system spoofing attack on unmanned aerial vehicle system[J]. Concurrency and Computation: Practice and Experience, 2022, 34(7): e5925. |
| [58] | SHARIFI-TEHRANI O, SABAHI M F, DANAEE M R. Low-complexity framework for GNSS jamming and spoofing detection on moving platforms[J]. IET Radar, Sonar & Navigation, 2020, 14(12): 2027-2038. |
| [59] | 马传焱. 无人机防诱骗防捕获技术研究[J]. 无线电工程, 2019, 49(10): 861-865. |
| MA C Y. Research on anti-deception and anti-capture of unmanned aerial vehicle[J]. Radio Engineering, 2019, 49(10): 861-865 (in Chinese). | |
| [60] | WANG S Q, WANG J, SU C H, et al. Intelligent detection algorithm against UAVs’GPS spoofing attack[C]∥2020 IEEE 26th International Conference on Parallel and Distributed Systems (ICPADS). Piscataway: IEEE Press, 2020: 382-389. |
| [61] | KOZOVIC, et al D., Spoofing in aviation : Security threats on GPS and ADSB system[J]. Vojnotehnički Glasnik, 2021, 69(2): 461-485. |
| [62] | RESTIVO R D, DODSON L C, WANG J, et al. GPS spoofing on UAV: A survey[C]∥IEEE INFOCOM 2023-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS). Piscataway: IEEE Press, 2023: 1-6. |
| [63] | 刘涛. GNSS拒止环境下的多无人机协同导航方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2021. |
| LIU T. Research on cooperative navigation method of multiple UAVs in GNSS denial environment[D]. Harbin: Harbin Institute of Technology, 2021 (in Chinese). | |
| [64] | 吴洪昊, 刘淮霞, 孙娟. 卡尔曼滤波在无人机导航系统的应用[J]. 安徽理工大学学报(自然科学版), 2017, 37(1): 55-59. |
| WU H H, LIU H X, SUN J. Application of Kalman filter in UAV navigation system[J]. Journal of Anhui University of Science and Technology (Natural Science), 2017, 37(1): 55-59 (in Chinese). | |
| [65] | 郝菁. 基于惯导/数据链协同的无人机集群导航定位算法研究[D]. 北京: 中国电子科技集团公司电子科学研究院, 2019. |
| HAO J. INS/intra flight datalink cooperative positioning algorithm for UAVs[D]. Beijing: CETC China Academy of Electronics and Information Technology, 2019 (in Chinese). | |
| [66] | 姜辉. 高速无人机的组合导航关键技术研究[D]. 杭州: 浙江大学, 2019. |
| JIANG H. Research on key technologies of integrated navigation for high-speed UAV[D]. Hangzhou: Zhejiang University, 2019 (in Chinese). | |
| [67] | 刘兴堂. 现代导航、制导与测控技术[M]. 北京: 科学出版社, 2010: 17-26. |
| LIU X T. Modern navigation, guidance and measurement control technology[M]. Beijing: Science Press, 2010: 17-26. | |
| [68] | BOITEAU S, VANEGAS F, SANDINO J, et al. Autonomous UAV navigation for target detection in visually degraded and GPS denied environments[C]∥2023 IEEE Aerospace Conference. Piscataway: IEEE Press, 2023: 1-10. |
| [69] | 王健博. 无人机自动导航系统关键技术研究[D]. 北京: 中国科学院大学, 2013. |
| WANG J B. Unmanned aerial vehicle (UAV) automatic navigation system is the key technology research[D]. Beijing: University of Chinese Academy of Sciences, 2013 (in Chinese). | |
| [70] | 屈若锟, 王致远, 刘晔璐, 等 .面向城市空中交通的无人机视觉定位技术[J]. 航空学报, 2025, 46(11): 531168. |
| QU R K, WANG Z Y, LIU Y L, et al. UAV visual positioning technology for urban air mobility[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531168 (in Chinese). | |
| [71] | 万宏发, 李姗姗, 蓝朝桢, 等. 基于因子图的无人机视觉定位方法[J]. 航空学报, 2023, 44(): 727627. |
| WAN H F, LI S S, LAN C Z, et al. UAV visual positioning method based on factor graph[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(Sup 1): 727627 (in Chinese). | |
| [72] | WANG C L, WANG T M, LIANG J H, et al. Bearing-only visual SLAM for small unmanned aerial vehicles in GPS-denied environments[J]. International Journal of Automation and Computing, 2013, 10(5): 387-396. |
| [73] | WANG Y X, FENG Z L, ZHANG H F, et al. Angle robustness unmanned aerial vehicle navigation in GNSS-denied scenarios[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2024, 38(9): 10386-10394. |
| [74] | 王新龙, 马闪. 高空长航时无人机高精度自主定位方法[J]. 航空学报, 2008, 29(): 39-45. |
| WANG X L, MA S. High precision autonomous localization method for high altitude and long-flight-time of unmanned aerial vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(Sup 1): 39-45 (in Chinese). | |
| [75] | 高春雷. 基于天文观测的高空长航无人机组合导航技术研究[D]. 南京: 南京航空航天大学, 2010. |
| GAO C L. Research on integrated navigation system ofhigh altitude/long endurance UAVs base on the astronomy sensor. Nanjing: Nanjing University of Aeronautics and Astronautics, 2010 (in Chinese). | |
| [76] | 吴海仙, 俞文伯, 房建成. 高空长航时无人机SINS/CNS组合导航系统仿真研究[J]. 航空学报, 2006, 27(2): 299-304. |
| WU H X, YU W B, FANG J C. Simulation of SINS/CNS integrated navigation system used on high altitude and long-flight-time unpiloted aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2006, 27(2): 299-304 (in Chinese). | |
| [77] | 王颖, 李岁劳, 张梦妮, 等. 长航时无人机惯性/天文组合导航算法研究[J]. 计算机仿真, 2012, 29(5): 47-50. |
| WANG Y, LI S L, ZHANG M N, et al. Study on long endurance UAV SINS/CNS integrated navigation algorithm[J]. Computer Simulation, 2012, 29(5): 47-50 (in Chinese). | |
| [78] | 崔少华. 捷联惯性/天文组合导航算法研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| CUI S H. Research on SINS/CNS integrated navigation algorithm[D]. Harbin: Harbin Institute of Technology, 2018 (in Chinese). | |
| [79] | 李天松, 黄艳虎, 周海燕, 等. 一种基于超宽带通信的无人机导航装置: CN108628327A[P]. 2018-10-09. |
| LI T S, HUANG Y H, ZHOU H Y, et al. A UAV navigation device based on UWB communication: CN108628327A[P]. 2018-10-09 (in Chinese). | |
| [80] | QIU Z Y, LI T E, WANG F G. Design of a positioning system for UAV in GPS-denied environment[C]∥2022 21st International Symposium on Communications and Information Technologies (ISCIT). Piscataway: IEEE Press, 2022: 43-46. |
| [81] | YANG B Y, YANG E F, YU L J. Vision and UWB-based anchor self-localisation system for UAV in GPS-denied environment[J]. Journal of Physics: Conference Series, 2021, 1922(1): 012001. |
| [82] | 谭龙玉, 康国华, 陈少华, 等. 一种基于磁测增强的高空长航无人机导航方案[J]. 四川兵工学报, 2012, 33(2): 5-8. |
| TAN L Y, KANG G H, CHEN S H, et al. A navigation scheme for high-altitude long-endurance UAVs based on magnetic survey enhancement[J]. Journal of Sichuan Ordnance, 2012, 33(2): 5-8 (in Chinese). | |
| [83] | CUI Y, WANG C, HU Q L, et al. A novel positioning method for UAV in GNSS-denied environments based on mechanical antenna[J]. IEEE Transactions on Industrial Electronics, 2024, 71(10): 13461-13469. |
| [84] | 刘颖, 曹聚亮, 吴美平. 无人机地磁辅助定位及组合导航技术研究[M]. 北京: 国防工业出版社, 2016: 3-10. |
| LIU Y, CAO J L, WU M P. Research on geomagnetism aided localization and integrated navigation techniques for UAVs[M]. Beijing: National Defense Industry Press, 2016: 3-10 (in Chinese). | |
| [85] | 孔天恒, 方舟, 李平. 基于雷达-扫描器/惯性导航系统的微小型无人机室内组合导航[J]. 控制理论与应用, 2014, 31(5): 607-613. |
| KONG T H, FANG Z, LI P. Indoor integrated navigation of micro aerial vehicle based on radar-scanner and inertial navigation system[J]. Control Theory & Applications, 2014, 31(5): 607-613 (in Chinese). | |
| [86] | 杭义军, 刘建业, 李荣冰, 等. 基于混合特征匹配的微惯性/激光雷达组合导航方法[J]. 航空学报, 2014, 35(9): 2583-2592. |
| HANG Y J, LIU J Y, LI R B, et al. MEMS IMU/LADAR integrated navigation method based on mixed feature match[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(9): 2583-2592 (in Chinese). | |
| [87] | MIERA P, SZOLC H, KRYAK T. LiDAR-based drone navigation with reinforcement learning[DB/OL]. arXiv preprint: 2307.14313, 2023. |
| [88] | 郭雷, 杨健, 曹松银, 等. 一种SINS/GPS/偏振光组合导航系统多目标优化抗干扰滤波方法: CN103323005B[P]. 2017-04-19. |
| GUO L, YANG J, CAO S Y, et al. A multi-target optimization anti-jamming filtering method for SINS/GPS/polarized integrated navigation system: CN103323005B[P]. 2017-04-19 (in Chinese). | |
| [89] | 刘建业, 贾文峰, 赖际舟, 等. 微小型四旋翼飞行器多信息非线性融合导航方法及实现[J]. 南京航空航天大学学报, 2013, 45(5): 575-582. |
| LIU J Y, JIA W F, LAI J Z, et al. Multi-information nonlinear fusion technology of micro quadrotor aircraft[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2013, 45(5): 575-582 (in Chinese). | |
| [90] | SOLOVIEV A, RUTKOWSKI A J. Fusion of inertial, optical flow, and airspeed measurements for UAV navigation in GPS-denied environments[C]∥Unmanned Systems Technology XI. Bellingham: SPIE, 2009. |
| [91] | CHENG C, CALMETTES V, PRIOT B, et al. Vision aided INS/GNSS integration for improving the robustness of a navigation system for mini unmanned aerial vehicles[C]∥Institute of Navigation International Technical Meeting 2013(ITM). New York: Institute of Navigation, 2013. |
| [92] | 闫小乐. GNSS/MIMU机载组合导航系统设计与实现[D]. 哈尔滨: 哈尔滨工程大学, 2015. |
| YAN X L. Design and implementation of GNSS/MIMU airborne integrated navigation system[D]. Harbin: Harbin Engineering University, 2015 (in Chinese). | |
| [93] | 倪静, 马波, 杨朝旭, 等. 视觉/惯性着陆组合引导方法设计与试验[J]. 航空学报, 2023, 44(): 727636. |
| NI J, MA B, YANG Z X, et al. Design and test of visual-inertial integrated method for landing guidance [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(Sup 1): 727636 (in Chinese). | |
| [94] | 南子寒, 刘大禹, 董明, 等. GNSS拒止下多源自主导航鲁棒滤波方法[J]. 航空学报, 2024, 45(): 730782. |
| NAN Z H, LIU D Y, DONG M, et al. Robust filtering method for GNSS denied multi-source autonomous navigation[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(Sup 1): 730782 (in Chinese). | |
| [95] | 曲蕴杰. 小型无人机惯性/卫星/视觉组合导航技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| QU Y J. Research on inertial/satellite/vision integrated navigation technology of small UAV[D]. Harbin: Harbin Institute of Technology, 2020 (in Chinese). | |
| [96] | YI J, ZHANG L, DENG J P, et al. GPS/SINS/BARO integrated navigation system for UAV[C]∥2010 International Forum on Information Technology and Applications. Piscataway: IEEE Press, 2010: 19-25. |
| [97] | ELAMIN A, ABDELAZIZ N, EL-RABBANY A. A GNSS/INS/LiDAR integration scheme for UAV-based navigation in GNSS-challenging environments[J]. Sensors, 2022, 22(24): 9908. |
| [98] | 陈磊, 陈宗基. 基于稀疏光流的无人机自主导航方案[J]. 航空学报, 2008, 29(): 127-134. |
| CHEN L, CHEN Z J. Sparse-optical-flow-based autonomous navigation scheme for unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(Sup 1): 127-134 (in Chinese). | |
| [99] | 吕品, 赖际舟, 杨天雨, 等. 基于气动模型辅助的四旋翼飞行器室内自主导航方法[J]. 航空学报, 2015, 36(4): 1275-1284. |
| LYU P, LAI J Z, YANG T Y, et al. Autonomous navigation method aided by aerodynamics model for an indoor quadrotor[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(4): 1275-1284 (in Chinese). | |
| [100] | SRISOMBOON I, LEE S. UAVs reformation approach based on packet loss in GPS-denied environments[C]∥2023 International Conference on Information Networking (ICOIN). Piscataway: IEEE Press, 2023: 606-609. |
| [101] | 房屹光. 无人机编队中的高精度抗干扰相对定位技术研究[J]. 无人系统技术, 2021, 4(5): 80-86. |
| FANG Y G. Research on high precision anti-jamming relative positioning technology in UAV formation[J]. Unmanned Systems Technology, 2021, 4(5): 80-86 (in Chinese). | |
| [102] | ELDOSOUKY A, FERDOWSI A, SAAD W. Drones in distress: A game-theoretic countermeasure for protecting UAVs against GPS spoofing[J]. IEEE Internet of Things Journal, 2020, 7(4): 2840-2854. |
| [103] | 李坤, 布树辉, 贾旋, 等. 基于惯性导航与数据链的飞机间相对定位方法[J]. 航空学报, 2024, 45(15): 329594. |
| LI K, BU S H, JIA X, et al. Relative aircraft positioning based on inertial navigation and datalink[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 329594 (in Chinese). | |
| [104] | 万开方, 吴志林, 武韫晖, 等. 拒止环境下基于深度强化学习的多无人机协同定位[J]. 航空学报, 2025, 46(8): 277-297. |
| WAN K F, WU Z L, WU Y H, et al. Cooperative location of multiple UAVs with deep reinforcement learning in GPS-denied environment[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 277-297 (in Chinese). | |
| [105] | 熊骏, 解相朋, 熊智, 等. 基于图模型的无人集群同步自定位与相对定位[J]. 航空学报, 2023, 44(): 729708. |
| XIONG J, XIE X P, XIONG Z, et al. Synchronized self-localization and relative-localization of unmanned swarms based on graph model[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(Sup 2): 729708 (in Chinese). | |
| [106] | 岳敬轩, 王红茹, 朱东琴, 等. 基于改进粒子滤波的无人机编队协同导航算法[J]. 航空学报, 2023, 44(14): 327995. |
| YUE J X, WANG H R, ZHU D Q, et al. UAV formation cooperative navigation algorithm based on improved particle filter[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(14): 327995 (in Chinese). | |
| [107] | 刘贞报, 刘序博, 贾真, 等. 一种基于机载平台的无人机集群控制系统及方法: CN110377054A[P]. 2019-10-25. |
| LIU Z B, LIU X B, JIA Z, et al. An unmanned aerial vehicle cluster control system and method based on an airborne platform: CN110377054A[P]. 2019-10-25 (in Chinese). | |
| [108] | 李坤, 布树辉, 李佳朋, 等. 基于单目视觉与测距信息的无人机集群定位方法[J]. 航空学报, 2025, 46(11): 531281. |
| LI K, BU S H, LI J P, et al. UAV swarm positioning method based on monocular vision and ranginginform ation [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531281 (in Chinese). | |
| [109] | 李宏图. 分布式多无人机基于视觉的相对定位及编队控制研究[D]. 天津: 天津大学, 2020. |
| LI H T. Research on vision-based relative positioning and formation control of distributed multi-UAV[D]. Tianjin: Tianjin University, 2020 (in Chinese). | |
| [110] | 向吴辉, 黄辉, 罗一鸣. 关于导航战概念的探讨[J]. 现代防御技术, 2006, 34(5): 65-68. |
| XIANG W H, HUANG H, LUO Y M. Discussion about the concept of navigation warfare[J]. Modern Defence Technology, 2006, 34(5): 65-68 (in Chinese). | |
| [111] | 邹昂, 陆勤夫. 导航战对高技术战争的影响及对我军的启示[J]. 空间电子技术, 2010, 7(4): 26-29. |
| ZOU A, LU Q F. The NAVWAR’s impact on the high-tech war and enlightenment to the PLA[J]. Space Electronic Technology, 2010, 7(4): 26-29 (in Chinese). | |
| [112] | 刘富, 舒展, 谢维华. 卫星导航对抗能力现状及发展趋势[J]. 导航定位学报, 2020, 8(6): 1-5, 13. |
| LIU F, SHU Z, XIE W H. Status and development trends of satellite navigation countermeasure capability[J]. Journal of Navigation and Positioning, 2020, 8(6): 1-5, 13 (in Chinese). | |
| [113] | 张启福, 徐世成, 王章, 等. 卫星导航定位欺骗式干扰对抗思路及策略研究[J]. 航天电子对抗, 2023, 39(2): 54-60. |
| ZHANG Q F, XU S C, WANG Z, et al. Research on the idea and strategy of deceptive jamming countermeasures for satellite navigation and positioning[J]. Aerospace Electronic Warfare, 2023, 39(2): 54-60 (in Chinese). | |
| [114] | 李隽, 楚恒林, 蔚保国, 等. 导航战技术及其攻防策略研究[J]. 无线电工程, 2008, 38(7): 36-39. |
| LI J, CHU H L, YU B G, et al. Study on NAVWAR technology and its attack-defense strategy[J]. Radio Engineering of China, 2008, 38(7): 36-39 (in Chinese). | |
| [115] | 任思衡, 娄艺蓝, 杨娜, 等. 导航战及其应对策略[J]. 导航定位学报, 2020, 8(3): 100-104. |
| REN S H, LOU Y L, YANG N, et al. Navigation warfare and its countermeasures[J]. Journal of Navigation and Positioning, 2020, 8(3): 100-104 (in Chinese). | |
| [116] | 张启福, 徐世成, 王章, 等. 基于“导航战” 的北斗卫星定位抗干扰策略[J]. 导航定位学报, 2023, 11(1): 24-29. |
| ZHANG Q F, XU S C, WANG Z, et al. Anti-jamming strategy of BeiDou satellite positioning based on navigation warfare[J]. Journal of Navigation and Positioning, 2023, 11(1): 24-29 (in Chinese). |
| [1] | 虞翔宇, 李文, 严杰, 梁世哲. 无人机液氢燃料电池热管理系统仿真研究[J]. 航空学报, 2025, 46(9): 630964-630964. |
| [2] | 杨芃芊, 陈禹彤, 刘俊辉, 杨杰豪, 单家元, 孙士珺. 串列翼货运无人机大攻角气动与操稳特性[J]. 航空学报, 2025, 46(9): 131056-131056. |
| [3] | 李荣祖, 刘莉, 杨盾. 基于多源域融合代理模型的氢能无人机优化设计[J]. 航空学报, 2025, 46(9): 630979-630979. |
| [4] | 万开方, 吴志林, 武韫晖, 强皓植, 吴艺博, 李波. 拒止环境下基于深度强化学习的多无人机协同定位[J]. 航空学报, 2025, 46(8): 331024-331024. |
| [5] | 姜凌峰, 李新凯, 张海, 李涵玮, 张宏立. 基于改进TD3算法的无人机动态环境无地图导航[J]. 航空学报, 2025, 46(8): 331035-331035. |
| [6] | 何友, 刘瑜, 李耀文, 丁自然, 董凯, 崔亚奇, 张财生, 王学谦, 李徵, 郭晨. 多源信息融合发展及展望[J]. 航空学报, 2025, 46(6): 531672-531672. |
| [7] | 向锦武, 马凯, 阚梓, 李道春, 郑可欣, 陈汉轩. 氢能源无人机关键技术研究进展[J]. 航空学报, 2025, 46(5): 531603-531603. |
| [8] | 丁奇帅, 雷帮军, 吴正平. 基于孪生网络的轻量型无人机单目标跟踪算法[J]. 航空学报, 2025, 46(4): 330925-330925. |
| [9] | 吴付杰, 王博文, 齐静雅, 曹铭智, 桑英俊, 李晟, 张玉珍, 陈钱, 左超. 机载多孔径全景图像合成技术研究进展[J]. 航空学报, 2025, 46(3): 630505-630505. |
| [10] | 马诺, 卫社春, 孟军辉, 刘清洋, 雷宇声. 考虑减速伞作用的无人机内埋舱体分离流场特性与动力学[J]. 航空学报, 2025, 46(3): 130755-130755. |
| [11] | 吴一全, 童康. 基于深度学习的无人机航拍图像小目标检测研究进展[J]. 航空学报, 2025, 46(3): 30848-030848. |
| [12] | 姜筱巍, 吴一全. 无人机航拍图像拼接方法研究进展[J]. 航空学报, 2025, 46(17): 331799-331799. |
| [13] | 赵江, 皮明豪, 田栢苓, 池沛, 王英勋. 面向多目标跟踪的集群无人机自组织共识决策方法[J]. 航空学报, 2025, 46(16): 331635-331635. |
| [14] | 杨永刚, 姜文韬, 高志云. 低空无人机实时目标检测算法[J]. 航空学报, 2025, 46(16): 331619-331619. |
| [15] | 陈丹, 汤程, 谢宇, 马园园, 徐天枢. 面向城市低空物流配送的无人机实时航迹双层规划[J]. 航空学报, 2025, 46(16): 331621-331621. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学