| 1 |
XU C C, LIAO X H, TAN J M, et al. Recent research progress of unmanned aerial vehicle regulation policies and technologies in urban low altitude[J]. IEEE Access, 2020, 8: 74175-74194.
|
| 2 |
PATCHOU M, SLIWA B, WIETFELD C. Flying robots for safe and efficient parcel delivery within the COVID-19 pandemic[C]∥2021 IEEE International Systems Conference (SysCon). Piscataway: IEEE Press, 2021: 1-7.
|
| 3 |
揭东, 汤新民, 李博, 等. 无人机冲突探测及解脱策略关键技术研究[J]. 武汉理工大学学报(交通科学与工程版), 2018, 42(5): 776-782.
|
|
JIE D, TANG X M, LI B, et al. Research on key technologies of UAV conflict detection and resolution strategy[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2018, 42(5):776-782 (in Chinese).
|
| 4 |
WEINERT A, CAMPBELL S, VELA A, et al. Well-clear recommendation for small unmanned aircraft systems based on unmitigated collision risk[J]. Journal of Air Transportation, 2018, 26(3): 113-122.
|
| 5 |
MULLINS M, HOLMAN M, FOERSTER K, et al. Dynamic separation thresholds for a small air-borne sense and avoid system: AIAA-2013-5148 [R]. Boston: AIAA, 2013.
|
| 6 |
张阳, 程先峰, 刘岩. 空中交通基于四维轨迹运行概念及其应用[J]. 指挥信息系统与技术, 2020, 11(5): 5-10.
|
|
ZHANG Y, CHENG X F, LIU Y. Operational concept and application of four-dimensional trajectory based operation in air traffic[J]. Command Information System and Technology, 2020, 11(5): 5-10 (in Chinese).
|
| 7 |
武晓光, 张军峰, 郑乐. 相关航空器的冲突探测与调度研究[J]. 武汉理工大学学报(交通科学与工程版), 2015, 39(1): 166-170.
|
|
WU X G, ZHANG J F, ZHENG Y. Research of conflict detection and scheduling for related aircraft[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2015, 39(1):166-170 (in Chinese).
|
| 8 |
PONGSAKORNSATHIEN N, BIJJAHALLI S, GARDI A, et al. A performance-based airspace model for unmanned aircraft systems traffic management[J]. Aerospace, 2020, 7(11): 154.
|
| 9 |
ZHAI W X, TONG X C, MIAO S X, et al. Collision detection for UAVs based on GeoSOT-3D grids[J]. ISPRS International Journal of Geo-Information, 2019, 8(7): 299.
|
| 10 |
顾俊伟. 基于多源数据融合的4D航迹规划技术研究[D]. 南京: 南京航空航天大学,2016: 34-50.
|
|
GU J W. Research on 4D route planning technology based on multi-source data fusion[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016: 34-50 (in Chinese).
|
| 11 |
谢华,苏方正,尹嘉男,等.低空无人机飞行冲突分类探测与差异解脱方法研究[J/OL].安全与环境学报, (2022-08-16)[2022-11-04]. .
|
|
XIE H, SU F Z, YIN J N, et al. Research on classified detection and differential resolution method for UAV flight conflicts in low altitude airspace [J/OL]. Journal of Safety and Environment, (2022-08-16)[2022-11-04]. (in Chinese).
|
| 12 |
付其喜, 梁晓龙, 张佳强, 等. 双层优化的多无人机合作式冲突探测与解脱[J]. 哈尔滨工业大学学报, 2020, 52(4): 74-83.
|
|
FU Q X, LIANG X L, ZHANG J Q, et al. Cooperative conflict detection and resolution for multiple UAVs using two-layer optimization[J]. Journal of Harbin Institute of Technology, 2020, 52(4): 74-83 (in Chinese).
|
| 13 |
VIRÁGH C, NAGY M, GERSHENSON C, et al. Self-organized UAV traffic in realistic environments[C]∥ 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). New York: ACM, 2016: 1645-1652.
|
| 14 |
INNOCENTI M, GELOSI P, POLLINI L. Air traffic management using probability function fields:AIAA-1999-4149[R]. Reston: AIAA, 1999.
|
| 15 |
ALONSO-AYUSO A, ESCUDERO L F, MARTÍN-CAMPO F J. An exact multi-objective mixed integer nonlinear optimization approach for aircraft conflict resolution[J]. TOP, 2016, 24(2): 381-408.
|
| 16 |
TANG X M, JI X Q, LI T. Key technology in muti⁃UAV conflict detection and resolution strategy [J]. Transactions of Nanjing University of Aeronautics and Astronautics,2020,37(2): 175⁃186.
|
| 17 |
CECEN R K, SARAÇ T, CETEK C. Meta-heuristic algorithm for aircraft pre-tactical conflict resolution with altitude and heading angle change maneuvers[J]. TOP, 2021, 29(3): 629-647.
|
| 18 |
PANG B Z, LOW K H, LV C. Adaptive conflict resolution for multi-UAV 4D routes optimization using stochastic fractal search algorithm[J]. Transportation Research Part C: Emerging Technologies, 2022, 139: 103666.
|
| 19 |
张宏宏, 甘旭升, 辛建霖, 等. 基于合作博弈的多机冲突解脱算法[J]. 北京航空航天大学学报, 2022, 48(5):863-871.
|
|
ZHANG H H, GAN X S, XIN J L, et al. Multi-aircraft conflict resolution algorithm based on cooperative game[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(5): 863-871 (in Chinese).
|
| 20 |
管祥民, 吕人力. 基于满意博弈论的复杂低空飞行冲突解脱方法[J]. 航空学报, 2017, 38(S1): 721475.
|
|
GUAN X M, LYU R L. Aircraft conflict resolution method based on satisfying game theory[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(S1): 721475 (in Chinese).
|
| 21 |
VAN DEN BERGEN G. A fast and robust GJK implementation for collision detection of convex objects[J]. Journal of Graphics Tools, 1999, 4(2): 7-25.
|
| 22 |
BERNABEU E J. Continuous distance computation for motions with constant accelerations[C]∥2010 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2010: 4028-4034.
|
| 23 |
MATHEWS J H. Numerical methods for computer science, engineering, and mathematics[M]. Englewood Cliffs: Prentice-Hall, 1987: 103-121.
|
| 24 |
REICH P G. Analysis of long-range air traffic systems: Separation standards-Ⅲ[J]. Journal of Navigation, 1966, 19(3): 331-347.
|
| 25 |
黄洋, 汤俊, 老松杨. 基于复杂网络的无人机飞行冲突解脱算法[J]. 航空学报, 2018, 39(12): 322222.
|
|
HUANG Y, TANG J, LAO S Y. UAV flight conflict resolution algorithm based on complex network[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(12): 322222 (in Chinese).
|
| 26 |
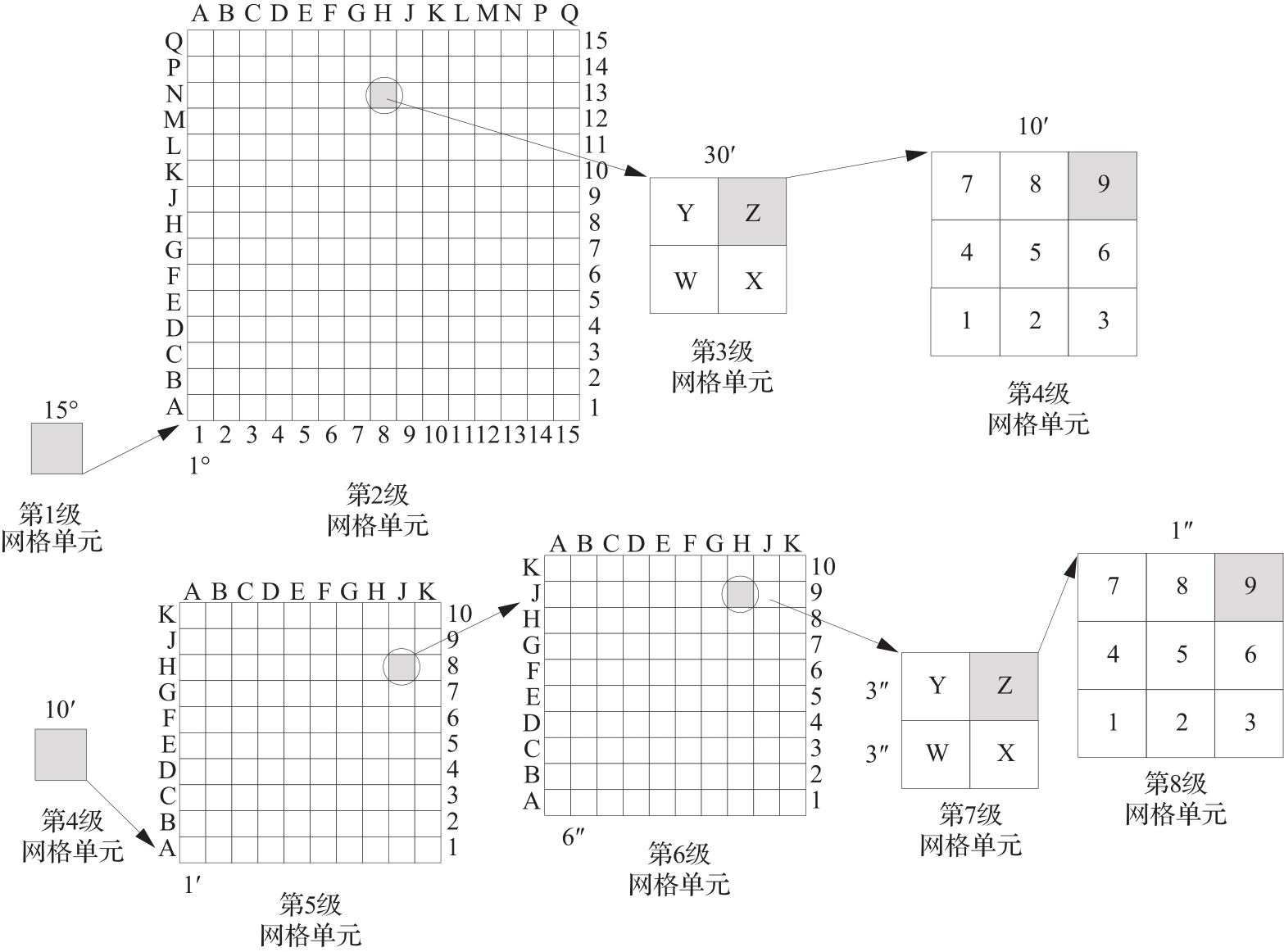
朱永文, 蒲钒. 空域空间网格标识原理及应用[J]. 北京航空航天大学学报, 2021, 47(12): 2462-2474.
|
|
ZHU Y W, PU F. Principle and application of airspace spatial grid identification[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(12): 2462-2474 (in Chinese).
|
 ), 韩斯特2, 张新珏2
), 韩斯特2, 张新珏2