肖友刚, 满香娜, 伍国华, 罗启章( )
)
收稿日期:2022-10-20
修回日期:2022-12-03
接受日期:2023-01-18
出版日期:2023-09-15
发布日期:2023-02-13
通讯作者:
罗启章
E-mail:qz_luo@csu.edu.cn
基金资助:
Yougang XIAO, Xiangna MAN, Guohua WU, Qizhang LUO()
Received:2022-10-20
Revised:2022-12-03
Accepted:2023-01-18
Online:2023-09-15
Published:2023-02-13
Contact:
Qizhang LUO
E-mail:qz_luo@csu.edu.cn
Supported by:摘要:
合成孔径雷达(SAR)能够不受天气、时间影响地获取高分辨率图像,因此,被广泛用于测绘、灾害监测、环境监测、资源侦察等领域。由于SAR是侧视成像,在复杂的地形中雷达波束会被障碍物遮挡,从而形成叠掩和阴影,这样不仅会造成数据的缺失,而且会加重后续对数据处理的工作负担。针对以上问题,在进行无人机航线规划时,通常要保证相邻航带的重叠率来减少叠掩和阴影对图像质量的影响。为了在减少重叠率的同时保证高质量的成像,研究了考虑地形起伏的SAR测绘航线规划问题,将旁向重叠度、覆盖率和叠掩阴影率作为评价指标,提出了基于模拟退火算法的机载SAR测绘航线规划方法,并展开仿真实验对提出的方法进行验证。实验结果表明:所提出的方法能够将航带的旁向重叠度均控制在设定值以内,并使覆盖率达到90%以上;航线数量相比以平均高度面为基准设计航线的方法降低了31.21%,测区覆盖率相比完全不考虑地形的航线设计方法提高了84.80%;相比Greedy算法,其几何形变率降低了8.73%,其冗余航线数量减少了100%。
中图分类号:
肖友刚, 满香娜, 伍国华, 罗启章. 考虑地形起伏的机载SAR测绘航线规划方法[J]. 航空学报, 2023, 44(17): 328143-328143.
Yougang XIAO, Xiangna MAN, Guohua WU, Qizhang LUO. Surveying and mapping path planning method for UAV-borne SAR considering terains[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 328143-328143.
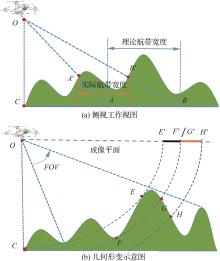
图1
机载SAR侧视成像导致的问题
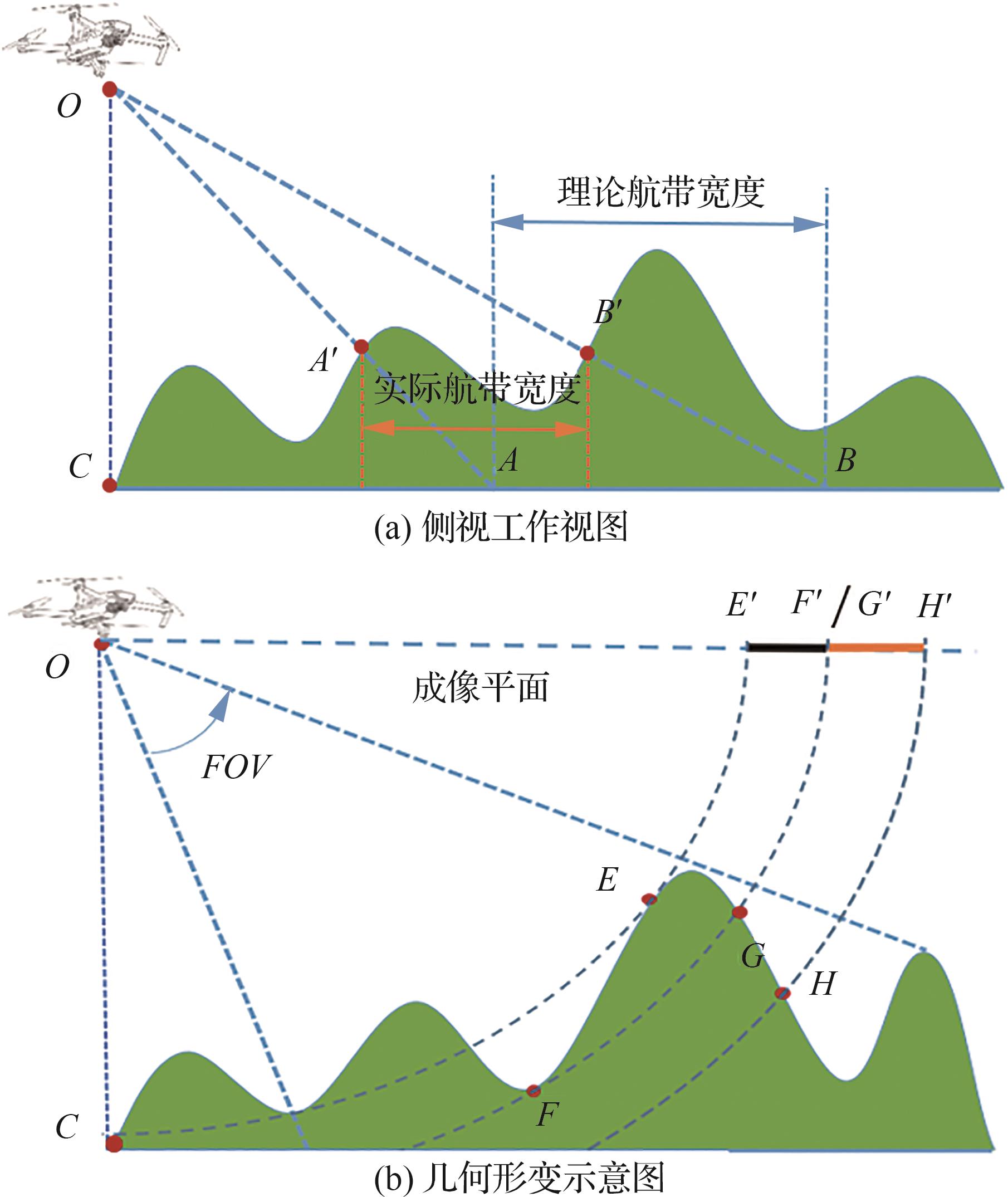

图2
航线规划方法总体框架
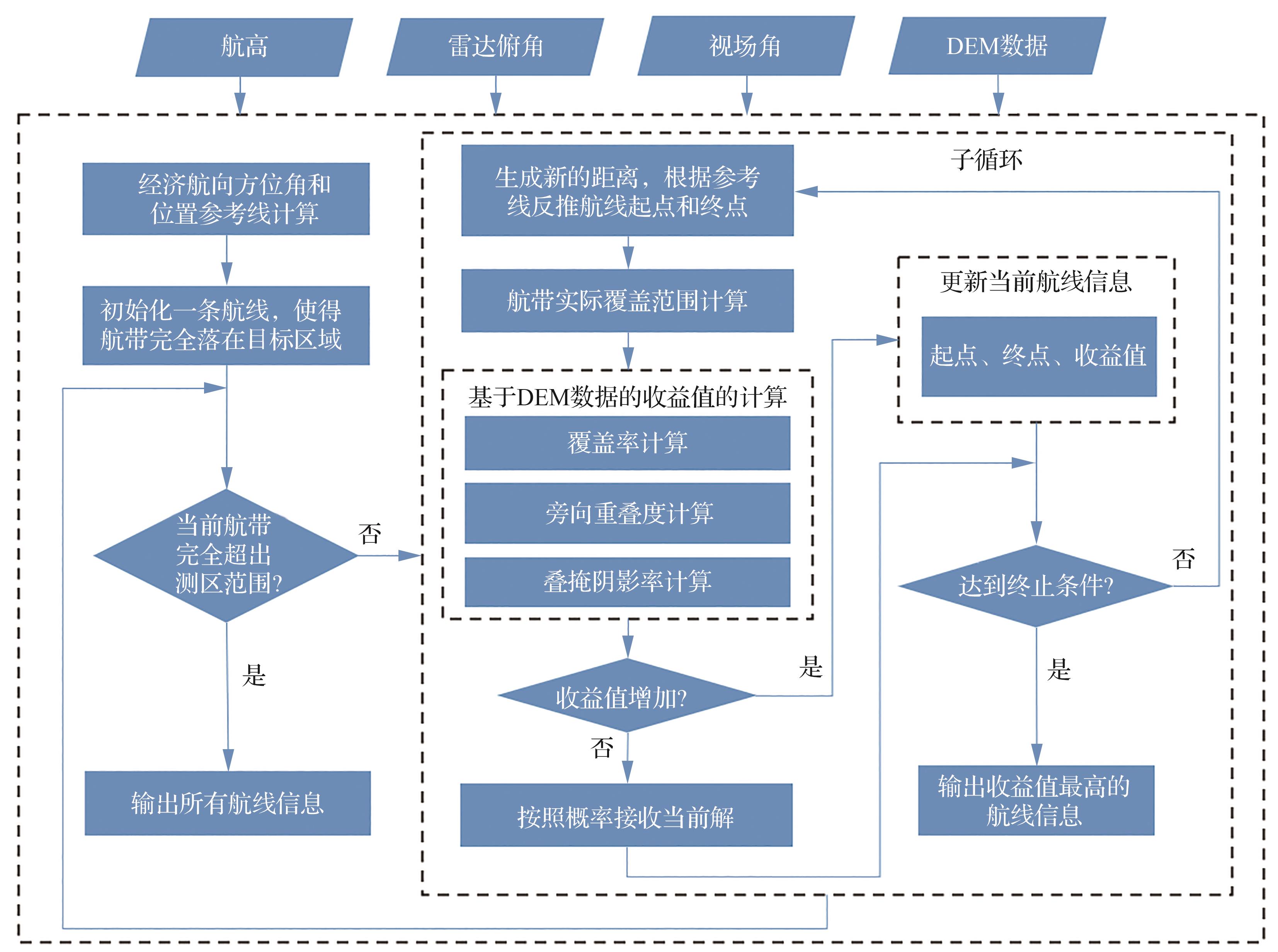

图3
实际覆盖范围
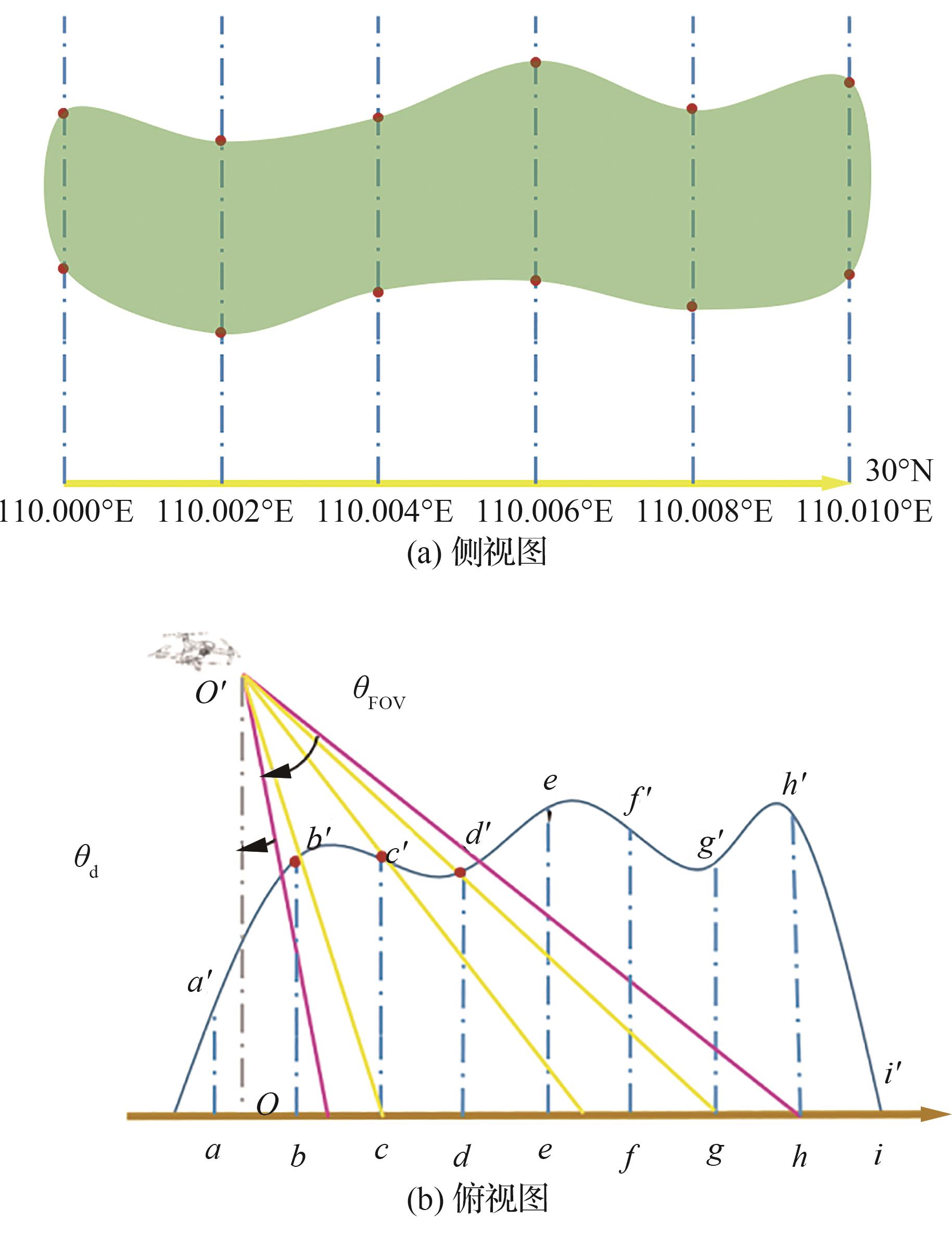
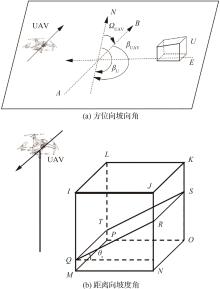
图4
坡向角和坡度角
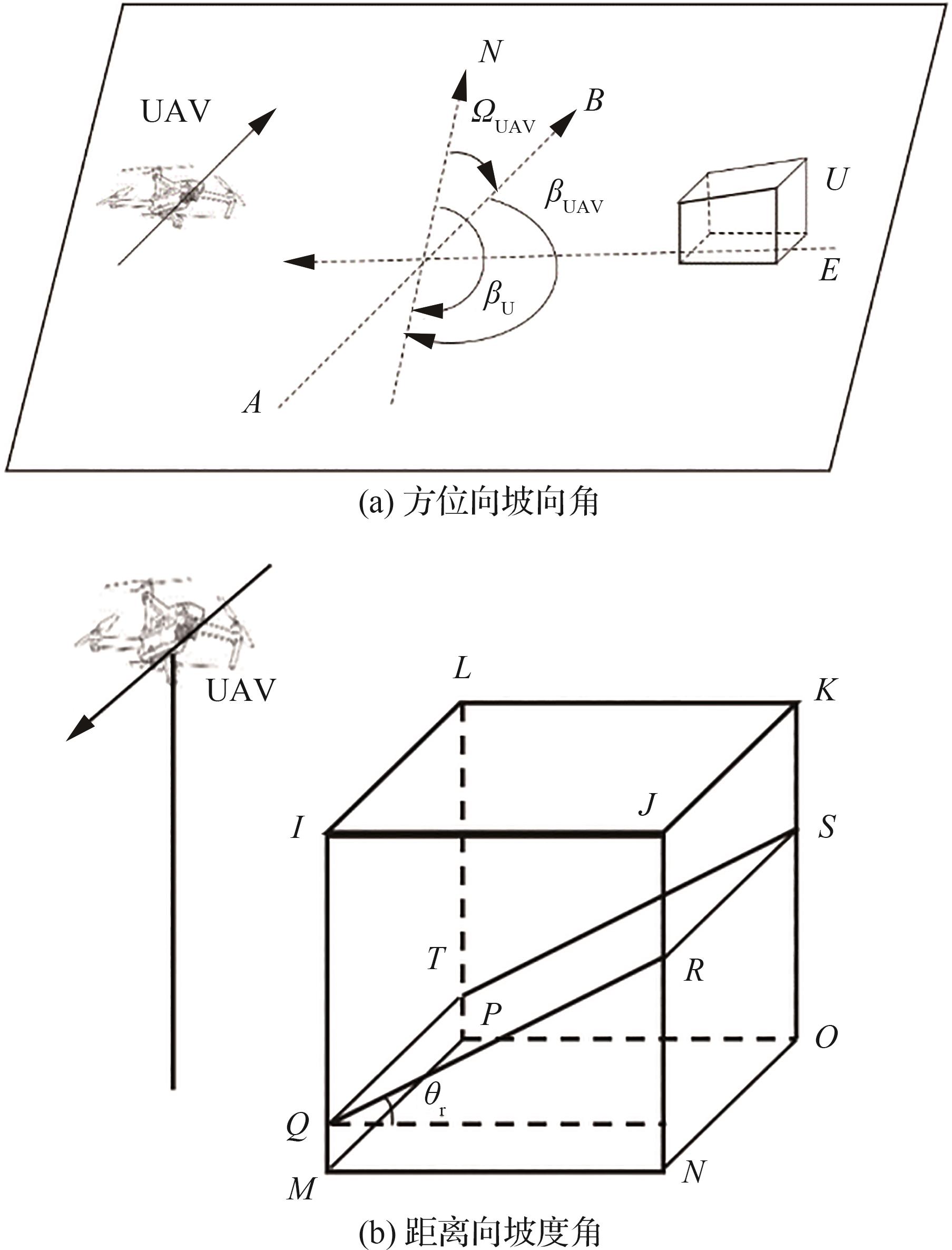
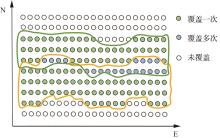
图5
点收益率示意图
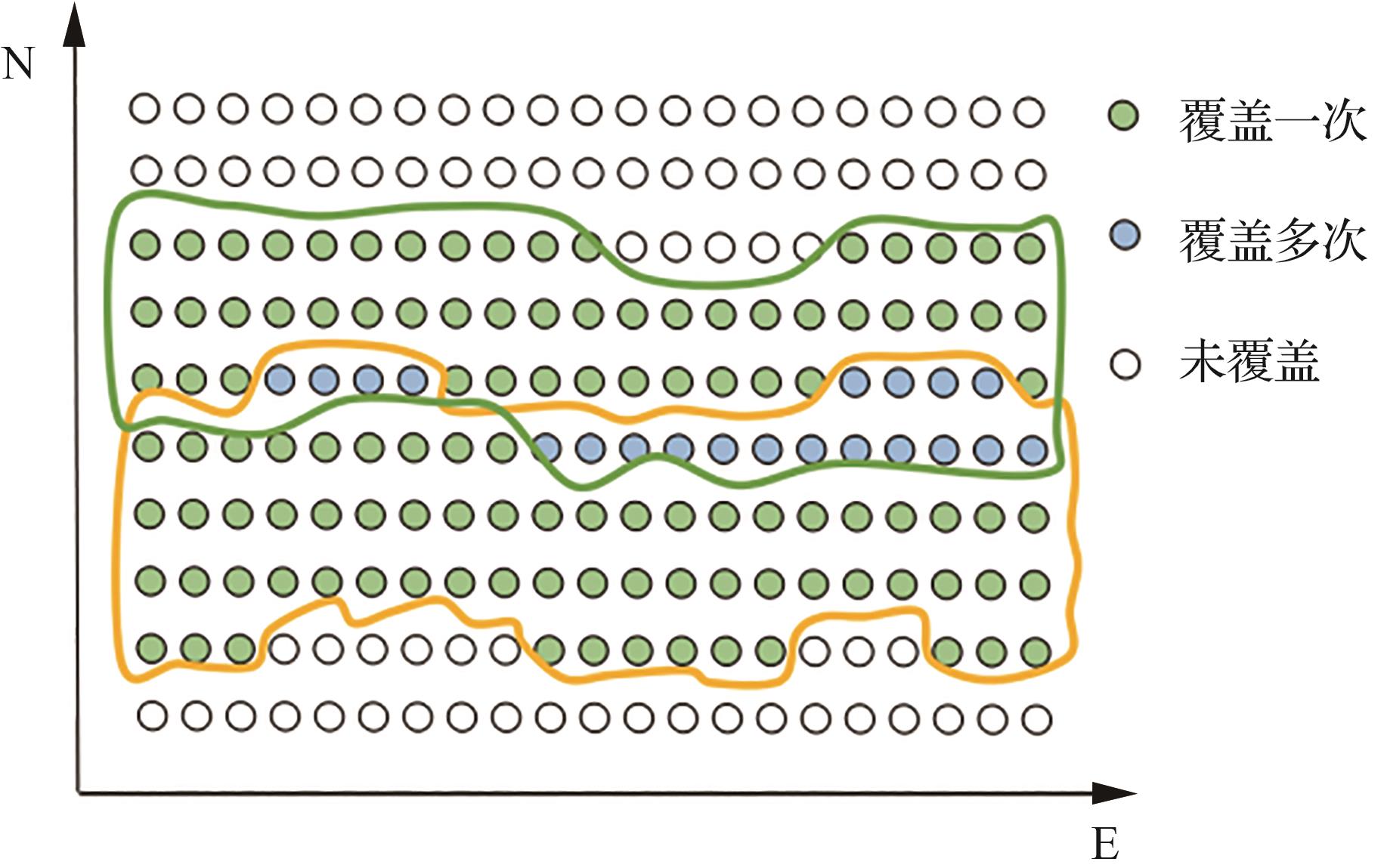
表1
测区参数
| 参数 | C1 | C2 | C3 | C4 |
|---|---|---|---|---|
| 平均高程/m | 1 335.67 | 15.53 | 1 299.99 | 1 505.22 |
| 高程标准差/m | 272.50 | 1.19 | 198.35 | 264.60 |
| 最小高程/m | 772.44 | 11.12 | 851.52 | 966.74 |
| 最大高程/m | 2 133.59 | 19.34 | 1 885.99 | 2 242.42 |
| 角点1/(°) | E109.752 N31.895 | E116.418 N 37.781 | E109.618 N31.896 | E109.752 N31.835 |
| 角点2/(°) | E109.752 N31.847 | E116.418 N37.772 | E109.618 N31.846 | E109.752 N31.789 |
| 角点3/(°) | E109.815 N31.847 | E116.430 N37.772 | E109.679 N31.846 | E109.815 N31.789 |
| 角点4/(°) | E109.815 N31.895 | E116.430 N37.781 | E109.679 N31.896 | E109.815 N31.835 |
| 投影面积/(km)2 | 31.51 | 1.05 | 31.54 | 30.57 |
表2
航线设计参数
| 参数 | C1 | C2 | C3 | C4 |
|---|---|---|---|---|
| 雷达俯角补角/(°) | 10 | 10 | 10 | 10 |
| 视场角/(°) | 20 | 40 | 20 | 20 |
| 飞行高度/m | 2 233.59 | 119.34 | 1 985.99 | 2 342.42 |
| 旁向重叠度/% | 30 | 30 | 30 | 30 |
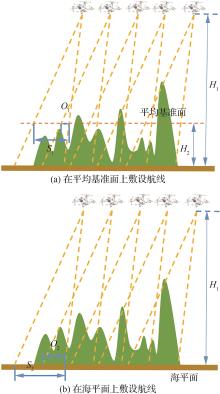
图6
在不同基准面上敷设的航线
表3
3种模型在不同测区的指标收益
| 模型 | 航线数量/条 | 覆盖率/% | |||||||
|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C1 | C2 | C3 | C4 | ||
| CPPM | 11.4 | 11.6 | 13 | 10.6 | 95.42 | 95.09 | 95.56 | 92.51 | |
| CPP1 | 17 | 13 | 23 | 17 | 94.81 | 90.58 | 96.72 | 94.64 | |
| CPP2 | 8 | 11 | 9 | 7 | 52.00 | 90.99 | 39.74 | 43.90 | |
| 模型 | 几何形变率/% | 旁向重叠度/% | |||||||
| C1 | C2 | C3 | C4 | C1 | C2 | C3 | C4 | ||
| CPPM | 14.62 | 0.83 | 8.79 | 15.40 | 22.88 | 25.89 | 24.69 | 22.55 | |
| CPP1 | 6.96 | 0.04 | 3.28 | 11.90 | 29.88 | 10.60 | 33.14 | 36.03 | |
| CPP2 | 4.59 | 0.00 | 1.14 | 5.65 | 0 | 10.02 | 0.36 | 0 | |
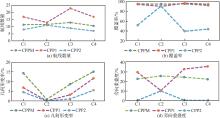
图7
3种方法在不同测区的平均收益值
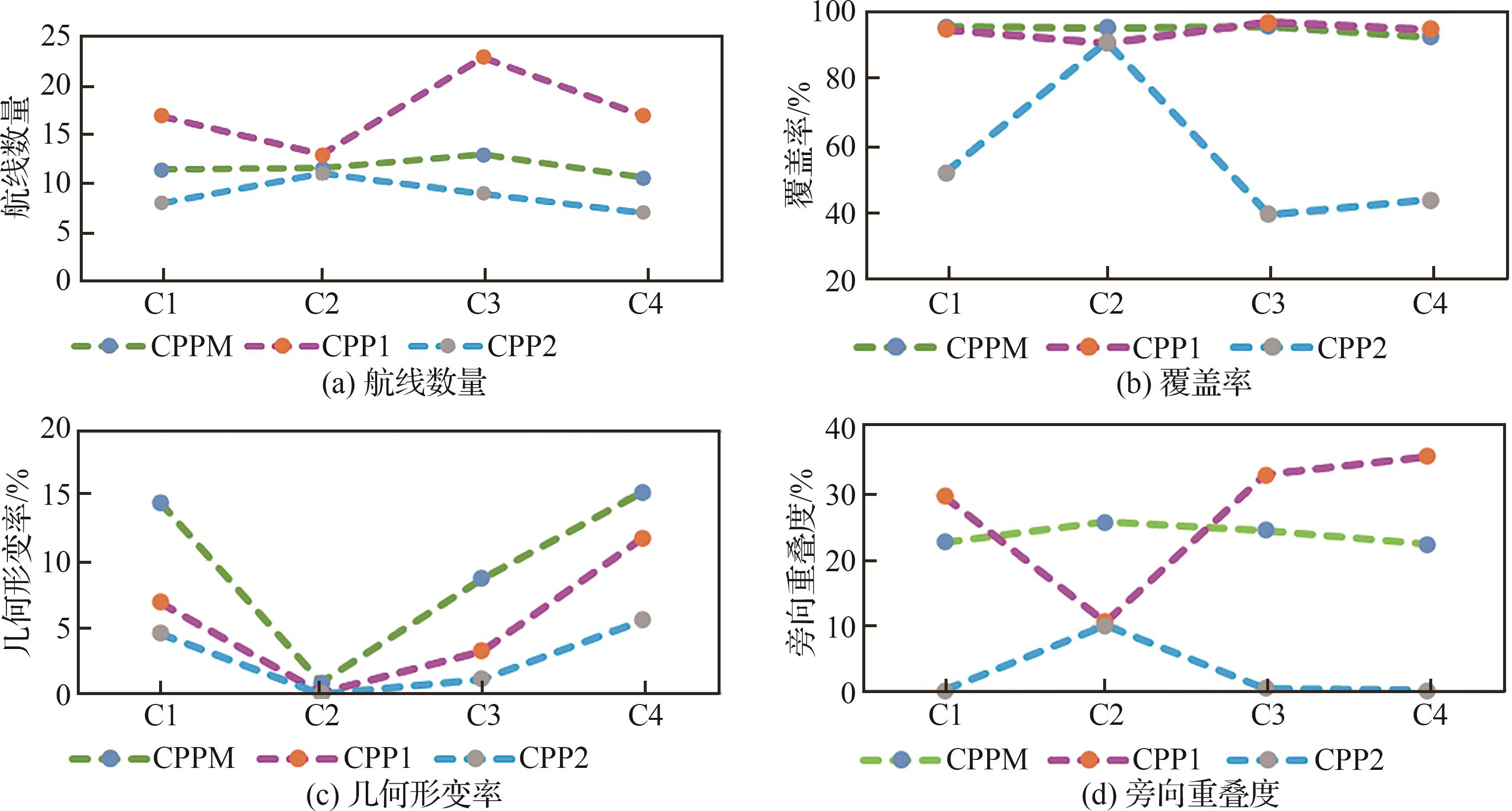
表4
CPPM方法与其他方法对比的Wilcoxon秩和检验结果
| 参数 | C1 | C2 | C3 | C4 | ||||
|---|---|---|---|---|---|---|---|---|
| CPP1 | CPP2 | CPP1 | CPP2 | CPP1 | CPP2 | CPP1 | CPP2 | |
| 航线数量 | 3.066 98×10-6 | 3.066 98×10-6 | 0.009 023 439 | 0.117 185 087 | 6.704 11×10-6 | 6.704 11×10-6 | 3.066 98×10-6 | 3.066 98×10-6 |
| 覆盖率 | 0.061 969 62 | 0.061 969 62 | 0.009 023 439 | 0.009 023 439 | 0.520 050 527 | 6.704 11×10-6 | 0.119 844 279 | 3.066 98×10-6 |
| 几何形变率 | 3.066 98×10-6 | 3.066 98×10-6 | 0.117 185 087 | 0.601 508 134 | 6.704 11×10-6 | 6.704 11×10-6 | 0.000 621 759 | 3.066 98×10-6 |
| 旁向重叠度 | 3.066 98×10-6 | 3.066 98×10-6 | 0.009 023 439 | 0.009 023 439 | 6.704 11×10-6 | 6.704 11×10-6 | 3.066 98×10-6 | 3.066 98×10-6 |
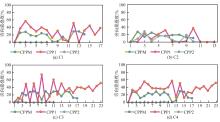
图8
不同目标区域的航带旁向重叠度
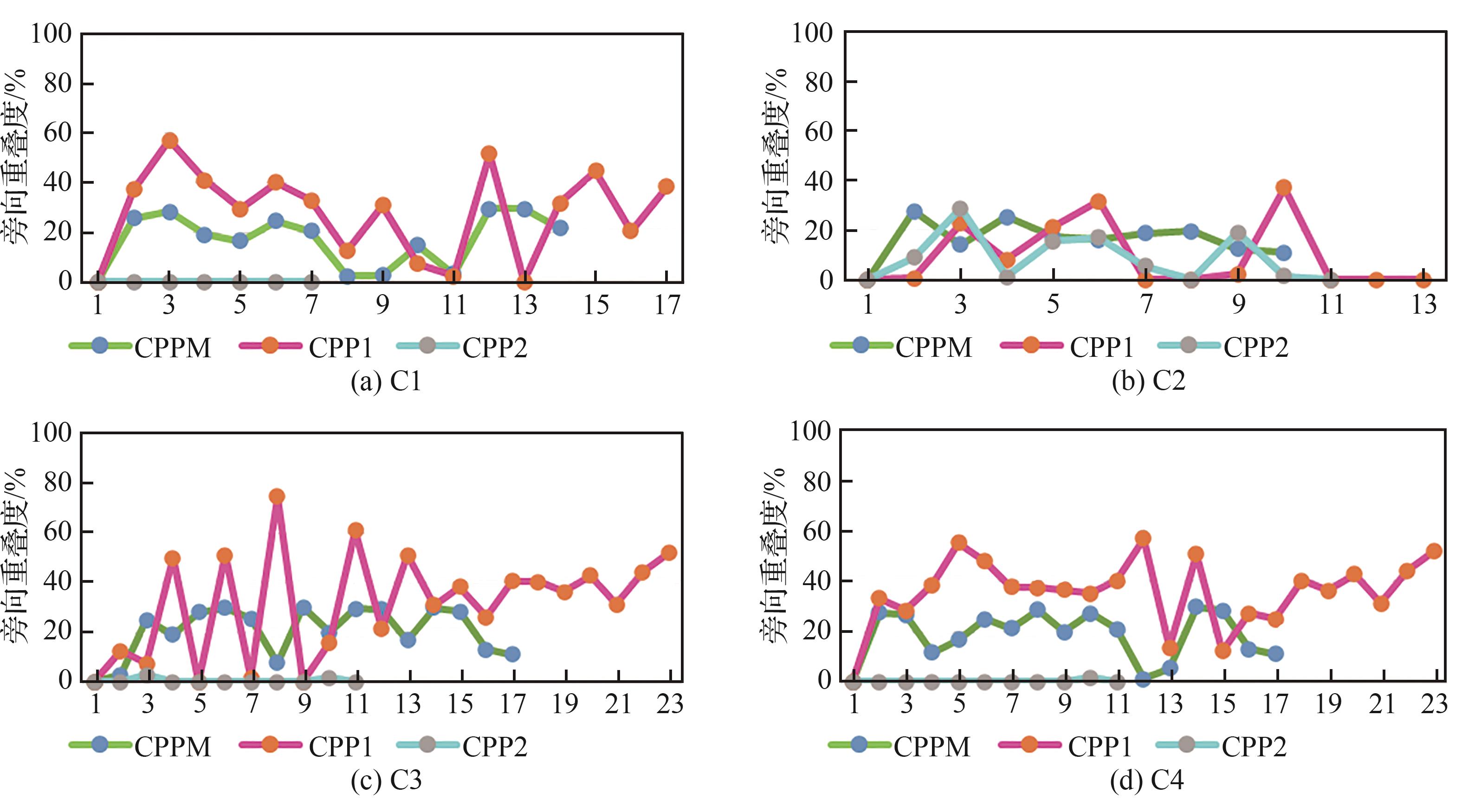
表5
2种算法在不同测区的实验结果
| 算法 | 覆盖率/% | 几何形变率/% | ||||||
|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C1 | C2 | C3 | C4 | |
| CPPM | 97.30 | 93.98 | 96.55 | 92.80 | 8.03 | 0 | 5.47 | 14.73 |
| Greedy | 96.81 | 93.66 | 95.50 | 92.95 | 8.41 | 0 | 7.86 | 14.73 |
| 算法 | 航线数量/条 | 冗余航线数量/条 | ||||||
| C1 | C2 | C3 | C4 | C1 | C2 | C3 | C4 | |
| CPPM | 11 | 11 | 14 | 10 | 0 | 0 | 0 | 0 |
| Greedy | 12 | 10.5 | 13.8 | 10 | 1 | 0 | 0.8 | 0.2 |
图9
2种算法在不同测区的平均收益值
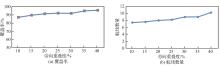
图10
不同旁向重叠度的实验结果
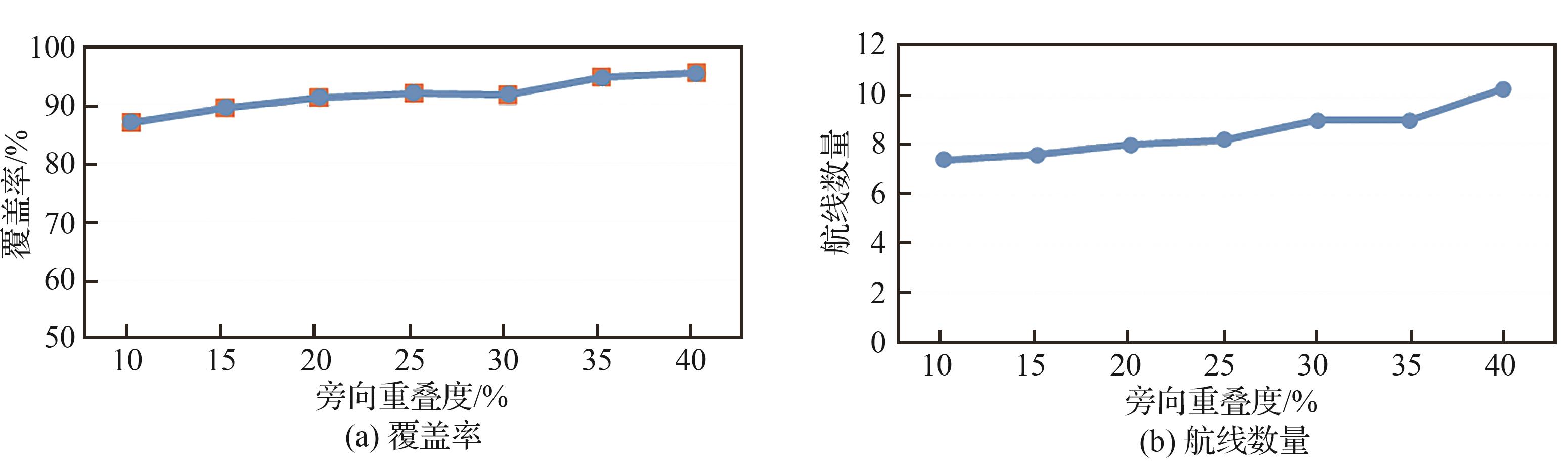
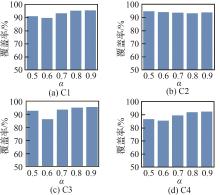
图11
不同温度下降系数下的覆盖率
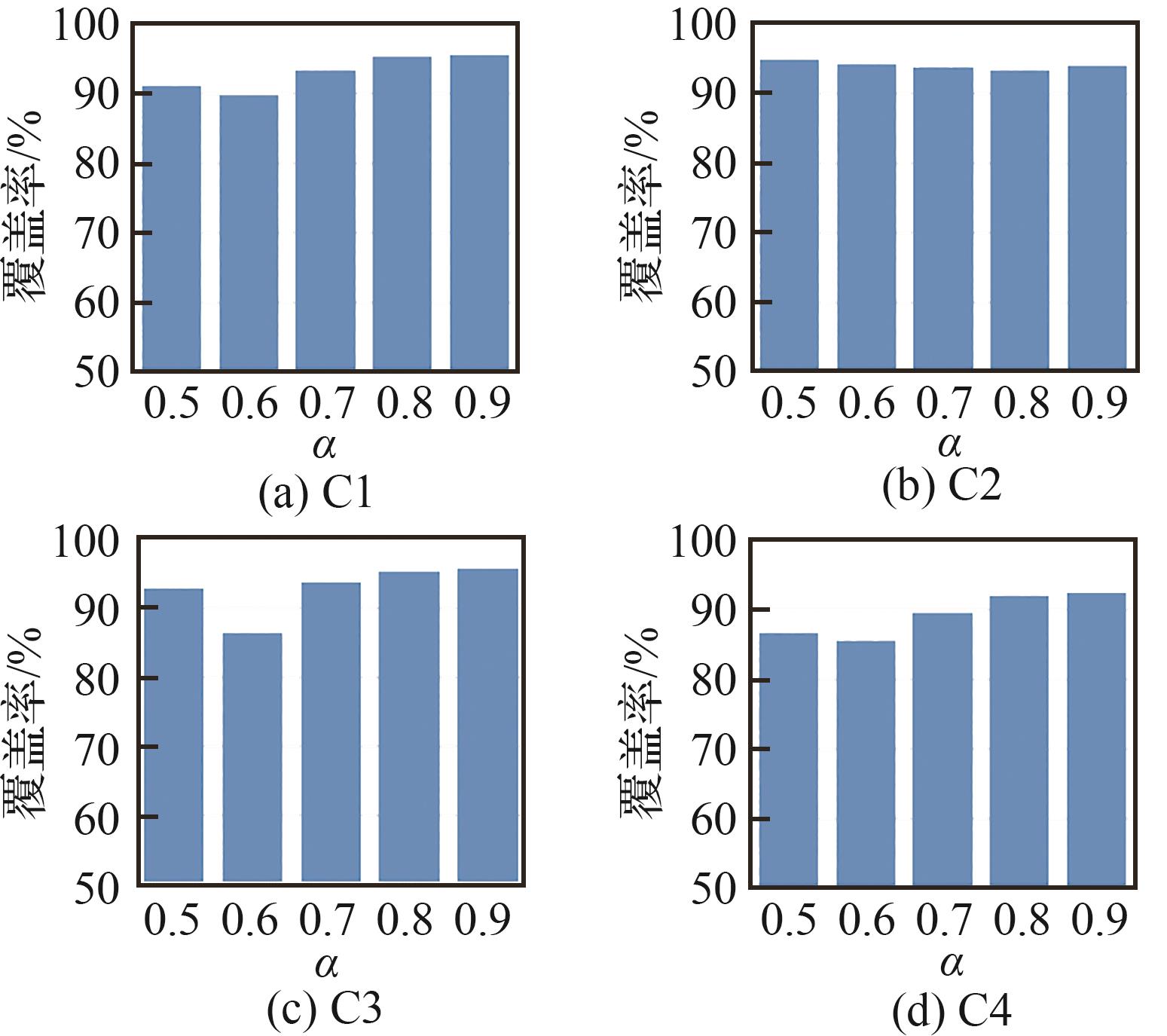
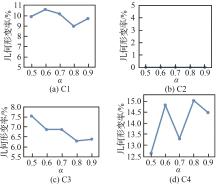
图12
不同温度下降系数下的几何形变率
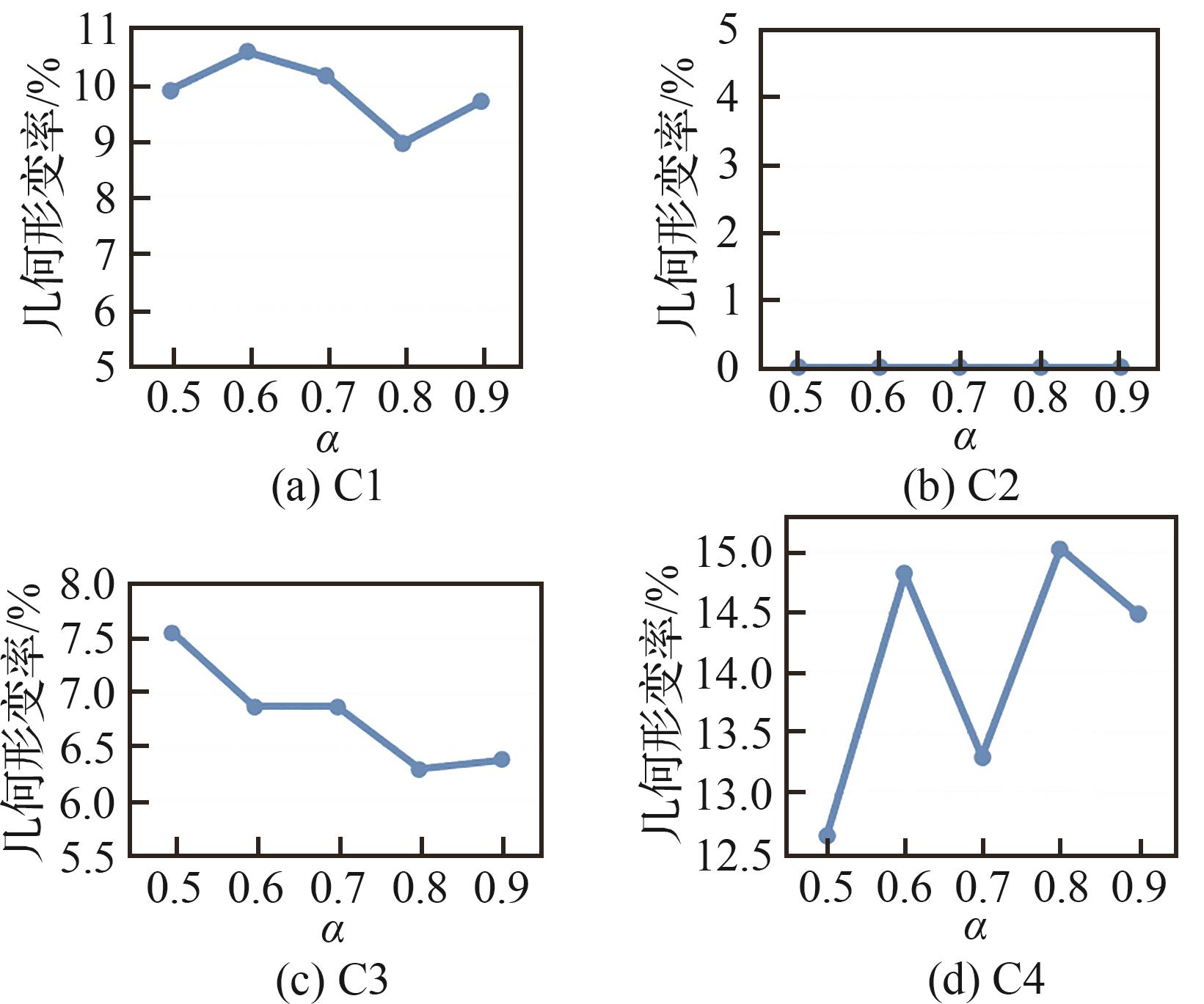

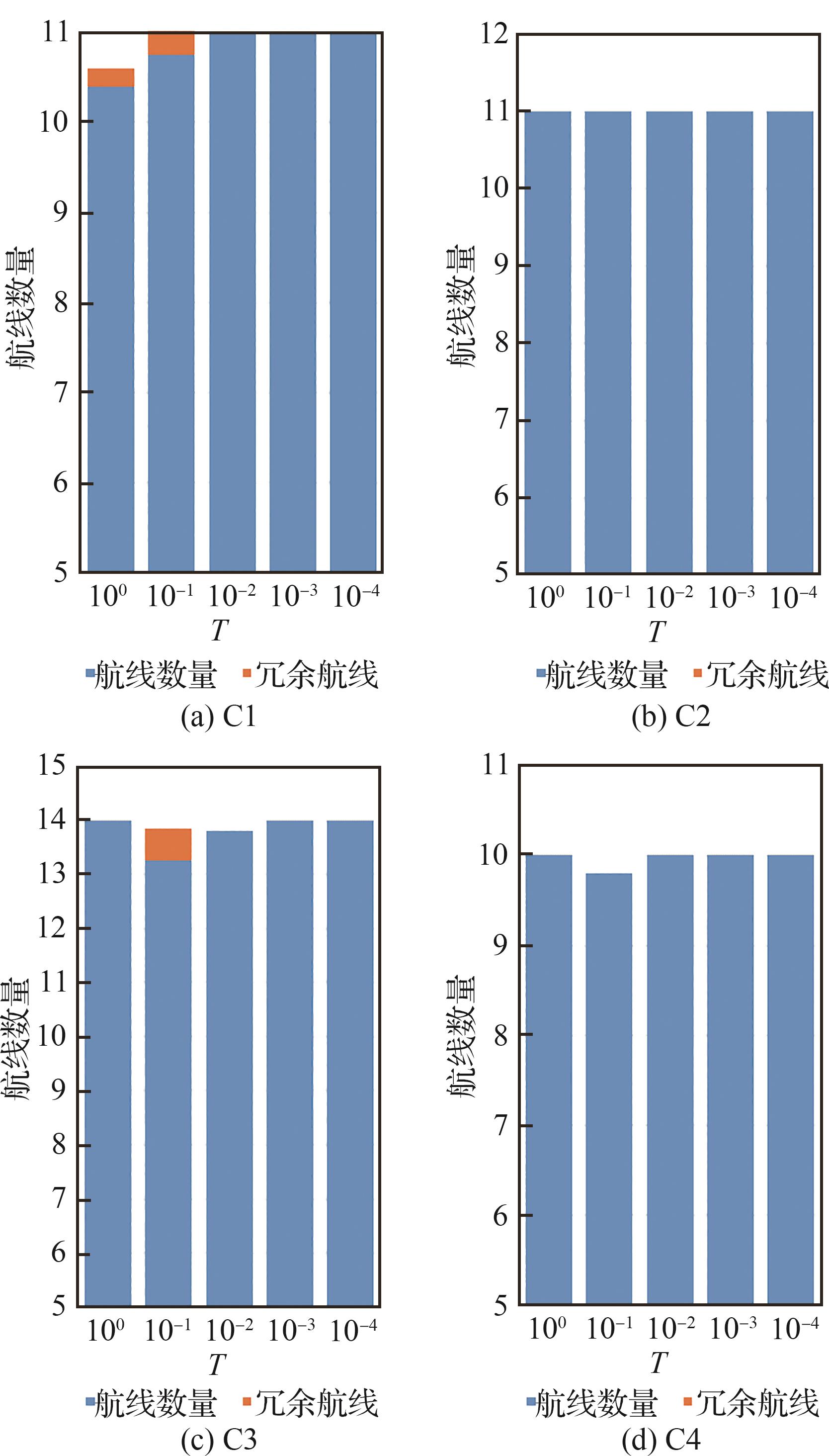
图13
不同温度下降系数下的冗余航线数量
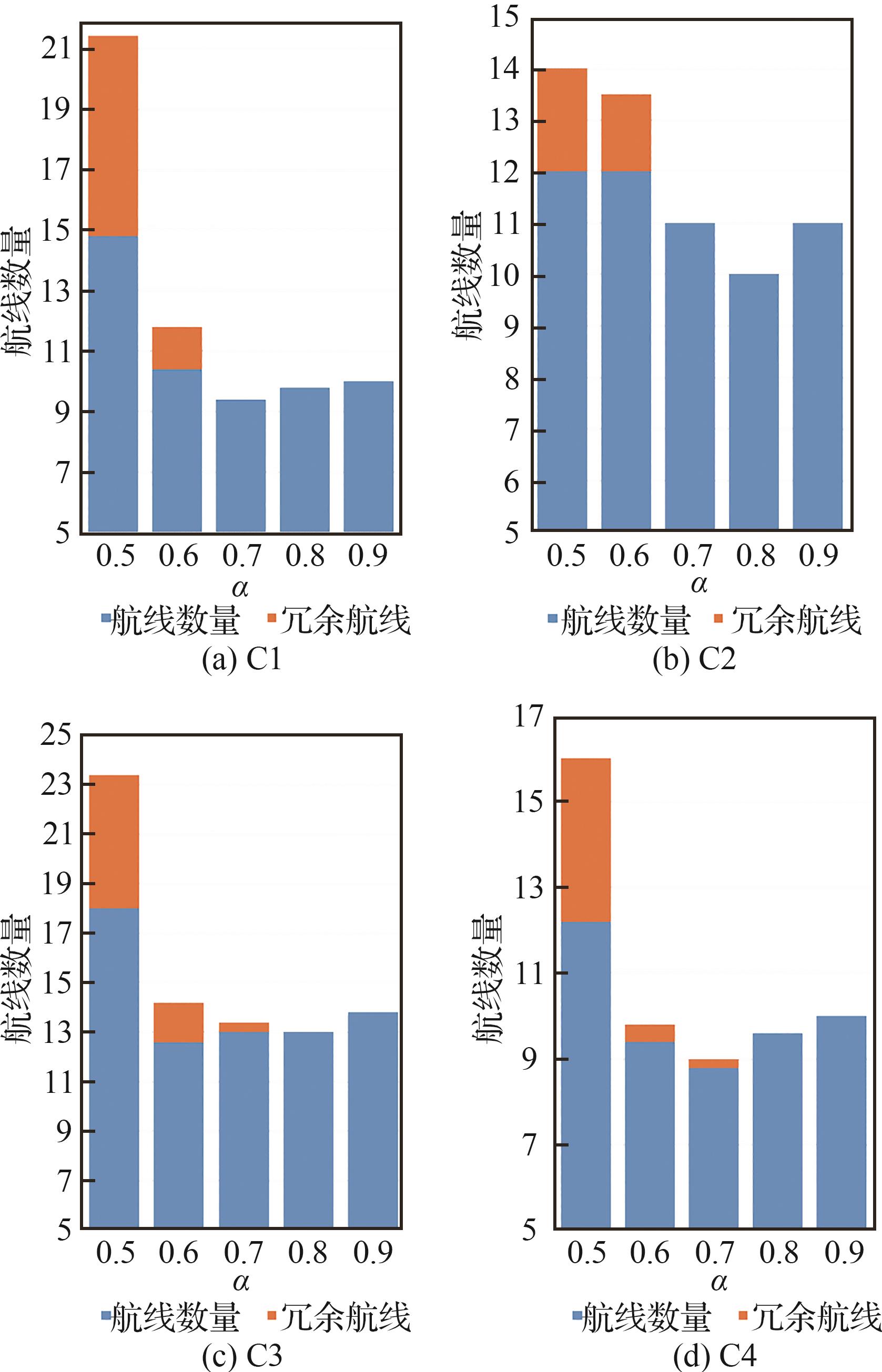
图14
不同初始温度下的覆盖率

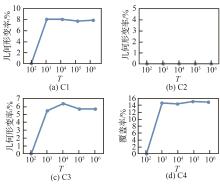
图15
不同初始温度下的几何形变率
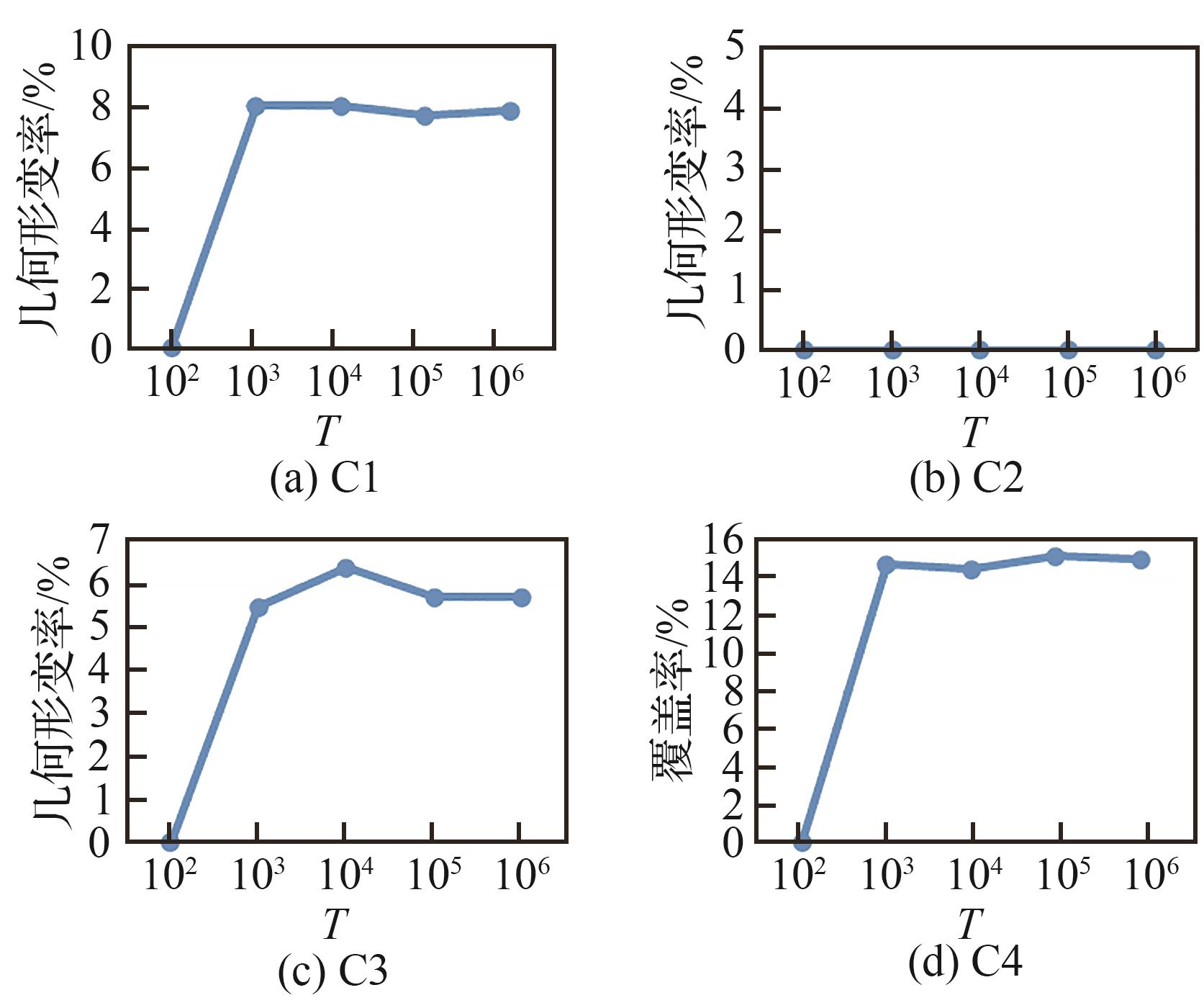

图 16
不同初始温度下的冗余航线数量
图17
不同终止温度下的覆盖率
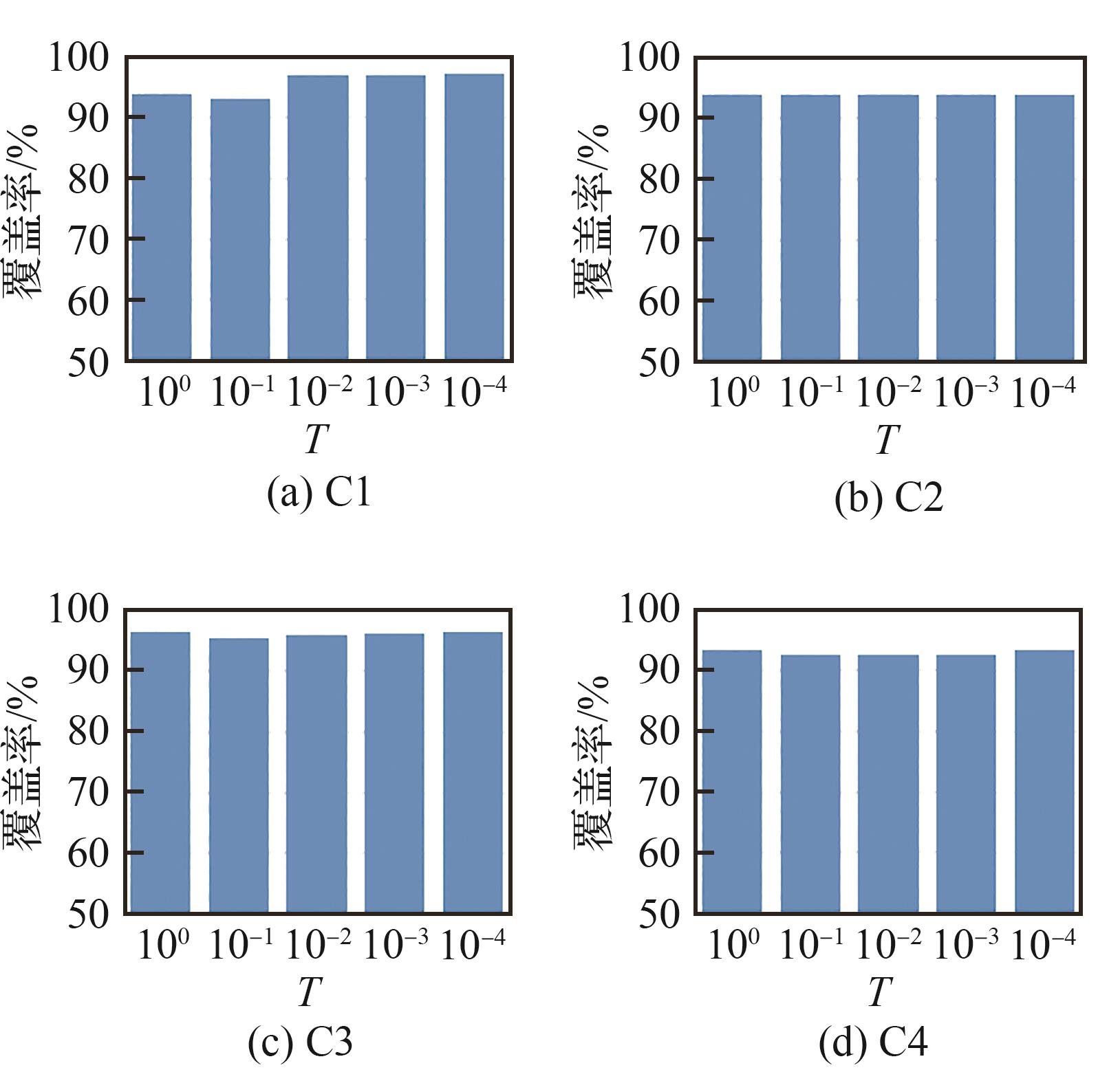
图18
不同终止温度下的几何形变率
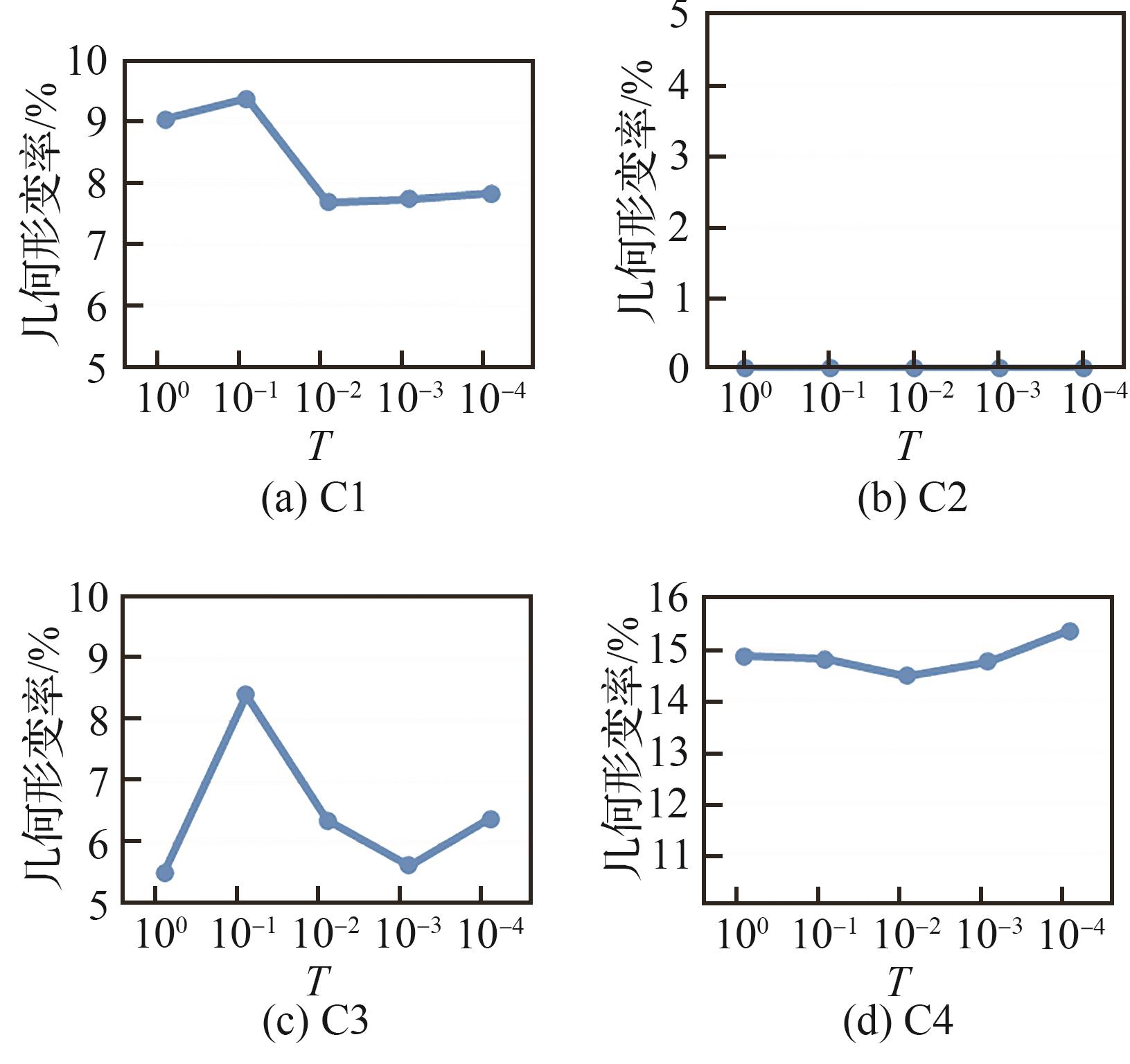

图19
不同终止温度下的冗余航线数量
| 1 | LIU T G, XU P F, ZHANG S H. A review of recent advances in scanned topographic map processing[J]. Neurocomputing, 2019, 328: 75-87. |
| 2 | YANG Z Y, YU X Y, DEDMAN S, et al. UAV remote sensing applications in marine monitoring: knowledge visualization and review[J]. Science of the Total Environment, 2022, 838: 155939. |
| 3 | BHARDWAJ A, SAM L, MARTÍN-TORRES F J, et al. UAVs as remote sensing platform in glaciology: present applications and future prospects[J]. Remote Sensing of Environment, 2016, 175: 196-204. |
| 4 | LI B Y, HOU J M, LI D L, et al. Application of LiDAR UAV for high-resolution flood modelling[J]. Water Resources Management, 2021, 35(5): 1433-1447. |
| 5 | HASHEMI-BENI L, JONES J, THOMPSON G, et al. Challenges and opportunities for UAV-based digital elevation model generation for flood-risk management: a case of princeville, North Carolina[J]. Sensors, 2018, 18(11): 3843. |
| 6 | YU R, LYU M H, LU J H, et al. Spatial coordinates correction based on multi-sensor low-altitude remote sensing image registration for monitoring forest dynamics[J]. IEEE Access, 2020, 8: 18483-18496. |
| 7 | SUN L, WAN L T, WANG X P. Learning-based resource allocation strategy for industrial IoT in UAV-enabled MEC systems[J]. IEEE Transactions on Industrial Informatics, 2021, 17(7): 5031-5040. |
| 8 | RASMUSSEN J, AZIM S, BOLDSEN S K, et al. The challenge of reproducing remote sensing data from satellites and unmanned aerial vehicles (UAVs) in the context of management zones and precision agriculture[J]. Precision Agriculture, 2021, 22(3): 834-851. |
| 9 | HUANG Y B, REDDY K N, FLETCHER R S, et al. UAV low-altitude remote sensing for precision weed management[J]. Weed Technology, 2018, 32(1): 2-6. |
| 10 | 王京卫. 测绘无人机低空数字航摄影像去雾霾研究[J]. 测绘学报, 2016, 45(2): 251. |
| WANG J W. Study of the geo-UAV low-altitude digital aerial image haze removal[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(2): 251 (in Chinese). | |
| 11 | SHU G F, CHANG J H, LU J, et al. A novel method for SAR ship detection based on eigensubspace projection[J]. Remote Sensing, 2022, 14(14): 3441. |
| 12 | FENG Y, CHEN J E, HUANG Z X, et al. A lightweight position-enhanced anchor-free algorithm for SAR ship detection[J]. Remote Sensing, 2022, 14(8): 1908. |
| 13 | TORRES M, PELTA D A, VERDEGAY J L, et al. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction[J]. Expert Systems with Applications, 2016, 55: 441-451. |
| 14 | CABREIRA T M, BRISOLARA L B, FERREIRA P R Jr. Survey on coverage path planning with unmanned aerial vehicles[J]. Drones, 2019, 3(1): 4. |
| 15 | CHEN G Z, SHEN Y, ZHANG Y X, et al. 2D multi-area coverage path planning using L-SHADE in simulated ocean survey[J]. Applied Soft Computing, 2021, 112: 107754. |
| 16 | 薛镇涛, 陈建, 张自超, 等. 基于复杂地块凸划分优化的多无人机覆盖路径规划[J]. 航空学报, 2022, 43(12): 403-417. |
| XUE Z T, CHEN J, ZHANG Z C, et al. Multi-UAV coverage path planning based on optimization of convex division of complex plots[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(12): 403-417 (in Chinese). | |
| 17 | CABREIRA T M, DI FRANCO C, FERREIRA P R, et al. Energy-aware spiral coverage path planning for UAV photogrammetric applications[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 3662-3668. |
| 18 | 夏阳升, 石建迈, 陈超, 等. 车机协同多区域覆盖侦察路径规划方法[J]. 指挥与控制学报, 2020, 6(4): 372-380. |
| XIA Y S, SHI J M, CHEN C, et al. Path planning method for multi-area reconnaissance by cooperated ground vehicle and drone[J]. Journal of Command and Control, 2020, 6(4): 372-380 (in Chinese). | |
| 19 | MARICA V, CURIAC C D, QUENTEL P Y M, et al. Static coverage path planning for UAVs with conical field of view when monitoring rectangular ground areas[C]∥ 2019 23rd International Conference on System Theory, Control and Computing (ICSTCC). Piscataway: IEEE Press, 2019: 510-514. |
| 20 | CHO S W, PARK H J, LEE H, et al. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations[J]. Computers & Industrial Engineering, 2021, 161: 107612. |
| 21 | YANG C H, TSAI M H, KANG S C, et al. UAV path planning method for digital terrain model reconstruction - A debris fan example[J]. Automation in Construction, 2018, 93: 214-230. |
| 22 | GUASTELLA D C, CANTELLI L, GIAMMELLO G, et al. Complete coverage path planning for aerial vehicle flocks deployed in outdoor environments[J]. Computers & Electrical Engineering, 2019, 75: 189-201. |
| 23 | CAO Y, CHENG X H, MU J Z. Concentrated coverage path planning algorithm of UAV formation for aerial photography[J]. IEEE Sensors Journal, 2022, 22(11): 11098-11111. |
| 24 | VASQUEZ GOMEZ J I, MELCHOR M M, HERRERA LOZADA J C. Optimal coverage path planning based on the rotating calipers algorithm[C]∥ 2017 International Conference on Mechatronics, Electronics and Automotive Engineering (ICMEAE). Piscataway: IEEE Press, 2017: 140-144. |
| 25 | MAYILVAGANAM K, SHRIVASTAVA A, RAJAGOPAL P. An optimal coverage path plan for an autonomous vehicle based on polygon decomposition and ant colony optimisation[J]. Ocean Engineering, 2022, 252: 111101. |
| 26 | MANSOURI S S, KANELLAKIS C, GEORGOULAS G, et al. 2D visual area coverage and path planning coupled with camera footprints[J]. Control Engineering Practice, 2018, 75: 1-16. |
| 27 | BEZAS K, TSOUMANIS G, ANGELIS C T, et al. Coverage path planning and point-of-interest detection using autonomous drone swarms[J]. Sensors, 2022, 22(19): 7551. |
| 28 | LUNA M A, ALE ISAAC M S, RAGAB A R, et al. Fast multi-UAV path planning for optimal area coverage in aerial sensing applications[J]. Sensors, 2022, 22(6): 2297. |
| 29 | DAI R, FOTEDAR S, RADMANESH M, et al. Quality-aware UAV coverage and path planning in geometrically complex environments[J]. Ad Hoc Networks, 2018, 73: 95-105. |
| 30 | 王炳乾, 陈超, 王华军, 等. 基于等高线构建无人机航线的新型仿地飞行策略[J]. 测绘通报, 2020(11): 104-107, 115. |
| WANG B Q, CHEN C, WANG H J, et al. A new ground-like flight method based on contours to construct drone routes[J]. Bulletin of Surveying and Mapping, 2020(11): 104-107, 115 (in Chinese). | |
| 31 | WANG H P, ZHANG S Y, ZHANG X Y, et al. Near-optimal 3-D visual coverage for quadrotor unmanned aerial vehicles under photogrammetric constraints[J]. IEEE Transactions on Industrial Electronics, 2022, 69(2): 1694-1704. |
| 32 | DAI X H, QUAN Q, REN J R, et al. An analytical design-optimization method for electric propulsion systems of multicopter UAVs with desired hovering endurance[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(1): 228-239. |
| 33 | 陈玥, 李英成, 李兵, 等. 复杂地势下轻小型无人机LiDAR自主航线设计[J]. 测绘科学, 2021, 46(3): 104-109, 132. |
| CHEN, Y, LI Y C, LI B, et al. Design of LiDAR autonomous route for light and small drones under complex terrain[J]. Science of Surveying and Mapping, 2021, 46(3): 104-109, 132 (in Chinese). | |
| 34 | VO A V, LAEFER D F, BYRNE J. Optimizing urban LiDAR flight path planning using a genetic algorithm and a dual parallel computing framework[J]. Remote Sensing, 2021, 13(21): 4437. |
| 35 | LIU N, LI X W, PENG X, et al. SAR tomography based on atomic norm minimization in urban areas[J]. Remote Sensing, 2022, 14(14): 3439. |
| 36 | 张同同, 杨红磊, 李东明, 等. SAR影像中叠掩与阴影区域的识别: 以湖北巴东为例[J]. 测绘通报, 2019(11): 85-88. |
| ZHANG T T, YANG H L, LI D M, et al. Identification of layover and shadows regions in SAR images: —taking Badong as an example[J]. Bulletin of Surveying and Mapping, 2019(11): 85-88 (in Chinese). | |
| 37 | 赵争. 地形复杂区域InSAR高精度DEM提取方法[J]. 测绘学报, 2016, 45(11): 1385. |
| ZHAO Z. Methods on high-accuracy DEM extraction from interferometric SAR in sophisticated terrain areas[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(11): 1385 (in Chinese). | |
| 38 | KUMAR G N, AHMED M S, SARKAR A K, et al. Reentry trajectory optimization using gradient free algorithms[J]. IFAC-PapersOnLine, 2018, 51(1): 650-655. |
| 39 | FAHIMNIA B, DAVARZANI H, ESHRAGH A. Planning of complex supply chains: a performance comparison of three meta-heuristic algorithms[J]. Computers & Operations Research, 2018, 89: 241-252. |
| 40 | IQBAL A, AL-GHAMDI K A. Energy-efficient cellular manufacturing system: Eco-friendly revamping of machine shop configuration[J]. Energy, 2018, 163: 863-872. |
| 41 | 戴健, 许菲, 陈琪锋. 多无人机协同搜索区域划分与路径规划[J]. 航空学报, 2020, 41(): 723770. |
| DAI J, XU F, CHEN Q F. Multi-UAV cooperative search on region division and path planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(Sup 1): 723770 (in Chinese). | |
| 42 | SAADI A AIT, SOUKANE A, MERAIHI Y, et al. UAV path planning using optimization approaches: a survey[J]. Archives of Computational Methods in Engineering, 2022, 29(6): 4233-4284. |
| [1] | 王兵, 邹润原, 常哲宁. 基于改进模拟退火的航空器起飞质量估算方法[J]. 航空学报, 2023, 44(16): 328090-328090. |
| [2] | 伍国华, 王天宇. 基于自适应模拟退火的大规模星座测控资源调度算法[J]. 航空学报, 2023, 44(12): 327759-327759. |
| [3] | 罗庆, 张涛, 单鹏, 张文涛, 刘子豪. 基于改进Q学习的IMA系统重构蓝图生成方法[J]. 航空学报, 2021, 42(8): 525792-525792. |
| [4] | 邹适宇, 李复名, 谢爱平, 周涛, 刘鹏. 基于改进烟花算法的资源分配[J]. 航空学报, 2021, 42(12): 324716-324716. |
| [5] | 潘成胜, 行贵轩, 戚耀文, 杨力. 多状态空间信息网络拓扑生成优化算法[J]. 航空学报, 2020, 41(4): 323546-323546. |
| [6] | 刘冰, 易泰河, 申镇, 易东云. 基于搜索空间变换和序优化的预警星座设计[J]. 航空学报, 2016, 37(11): 3413-3424. |
| [7] | 燕洪成, 张庆君, 孙勇. 星间链路数量受限的导航卫星网络链路分配问题[J]. 航空学报, 2015, 36(7): 2329-2339. |
| [8] | 刘中杰, 曹云峰, 庄丽葵, 丁萌. 基于控制线方法的机载SAR和可见光图像匹配应用研究[J]. 航空学报, 2013, 34(9): 2194-2201. |
| [9] | 徐秀栋, 黄攀峰, 孟中杰. 空间绳系机器人逼近目标协调控制方法[J]. 航空学报, 2013, 34(5): 1222-1231. |
| [10] | 伍国华, 马满好, 王慧林, 邱涤珊. 基于任务聚类的多星观测调度方法[J]. 航空学报, 2011, 32(7): 1275-1282. |
| [11] | 张安平;陈国平. 基于混合人工鱼群算法的结构有限元模型修正[J]. 航空学报, 2010, 31(5): 940-945. |
| [12] | 李俨;董玉娜. 基于SA-DPSO混合优化算法的协同空战火力分配[J]. 航空学报, 2010, 31(3): 626-631. |
| [13] | 王晓庆;韩景龙;张军红. 不同气流偏角下的壁板热颤振分析及多目标优化设计[J]. 航空学报, 2010, 31(11): 2195-2201. |
| [14] | 白保存;贺仁杰;李菊芳;陈英武. 考虑任务合成的成像卫星调度问题[J]. 航空学报, 2009, 30(11): 2165-2171. |
| [15] | 邱志平;张宇星. 智能优化算法在飞机总体设计中的应用[J]. 航空学报, 2009, 30(1): 62-67. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学