Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (8): 432623.doi: 10.7527/S1000-6893.2025.32623
• Material Engineering and Mechanical Manufacturing • Previous Articles
Yong TAO1,2( ), Xiaotong WANG2, Yazui LIU2, Haitao LIU1, Yufan ZHANG3, Lei XUE4, Ruijun GUO5, Fan REN6, Hongxing WEI1
), Xiaotong WANG2, Yazui LIU2, Haitao LIU1, Yufan ZHANG3, Lei XUE4, Ruijun GUO5, Fan REN6, Hongxing WEI1
Received:2025-07-24
Revised:2025-08-14
Accepted:2025-10-09
Online:2025-12-09
Published:2025-12-08
Contact:
Yong TAO
E-mail:taoy@buaa.edu.cn
Supported by:CLC Number:
Yong TAO, Xiaotong WANG, Yazui LIU, Haitao LIU, Yufan ZHANG, Lei XUE, Ruijun GUO, Fan REN, Hongxing WEI. Intelligent parameter recommendation method for dual-robot drilling and riveting with knowledge-rule fusion and dynamic confidence quantification[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(8): 432623.

Fig.1
Framework of intelligent parameter recommendation for dual-robot drilling and riveting
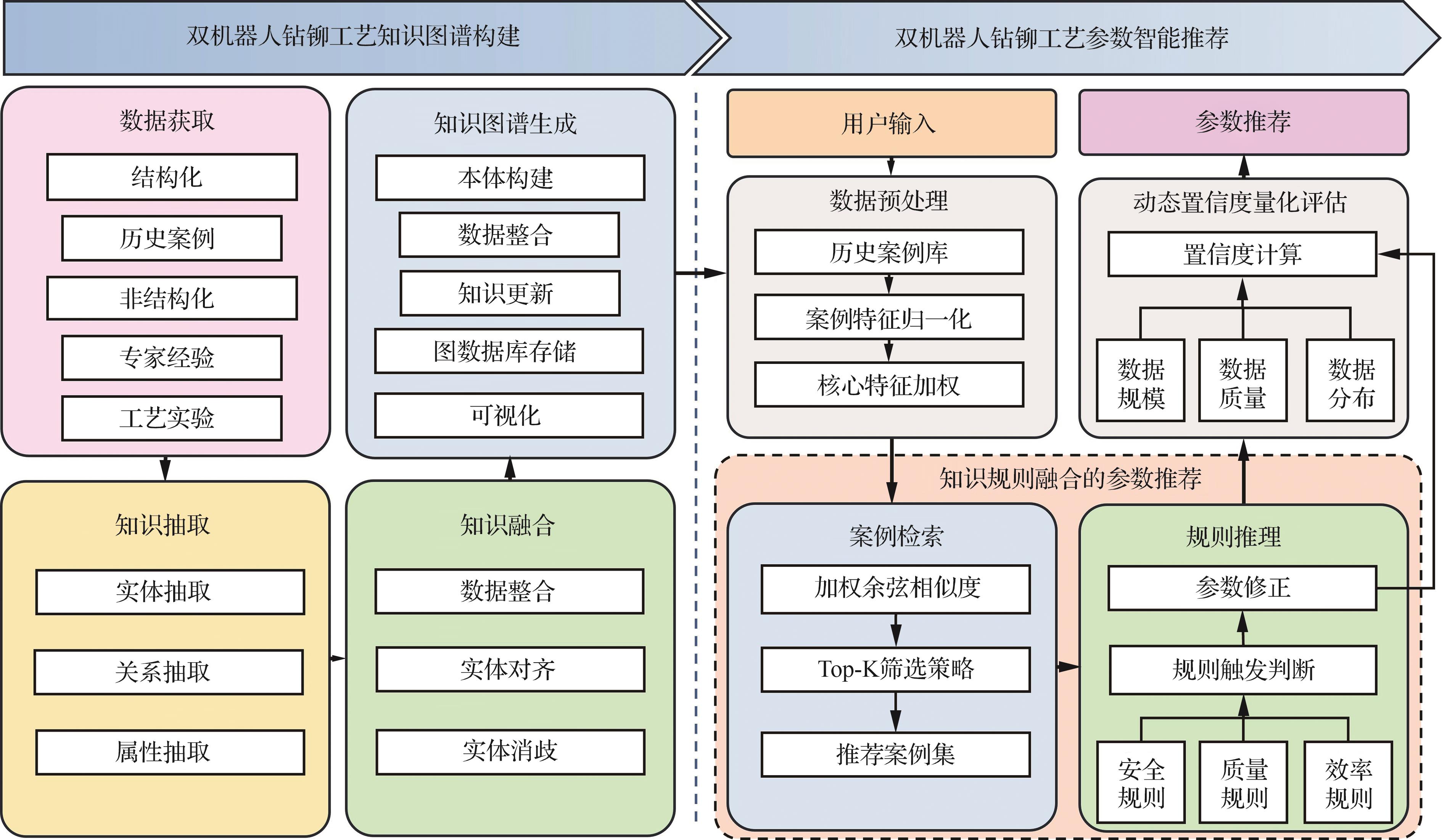
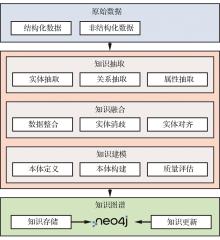
Fig.2
Construction process of knowledge graph for dual-robot drilling and riveting process
Table 1
Definition of entity relationships
| 关系 | 关系类型 | 关系定义 |
|---|---|---|
| 是ID | 实体-子实体 | 各实体身份的唯一标识符 |
| 有关系 | 实体-子实体 | 实体与子实体间的组成关系及各实体包含的参数 |
有 是 | 实体-实体 | 实体间的包含关系,二者互为对应 |
| 满足要求 | 层-实体 | 不同层内实体包含的质量要求,二者互为对应 |
| 使用机器人 | 层-层 | 链接实例层与工具层,包括机器人实体与刀具实体 |
| 使用刀具 | ||
| 有加工工件 | 层-层 | 链接实例层与工件层 |
| 使用钻孔工艺 | 层-层 | 链接实例层与工艺层,包括钻孔实体与铆接实体 |
| 使用铆接工艺 | ||
| 有钻铆质量 | 层-层 | 链接实例层与特征层 |
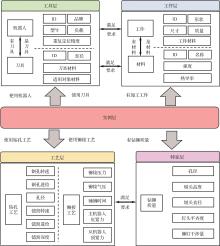
Fig.3
Construction of ontology model for dual-robot drilling and riveting process
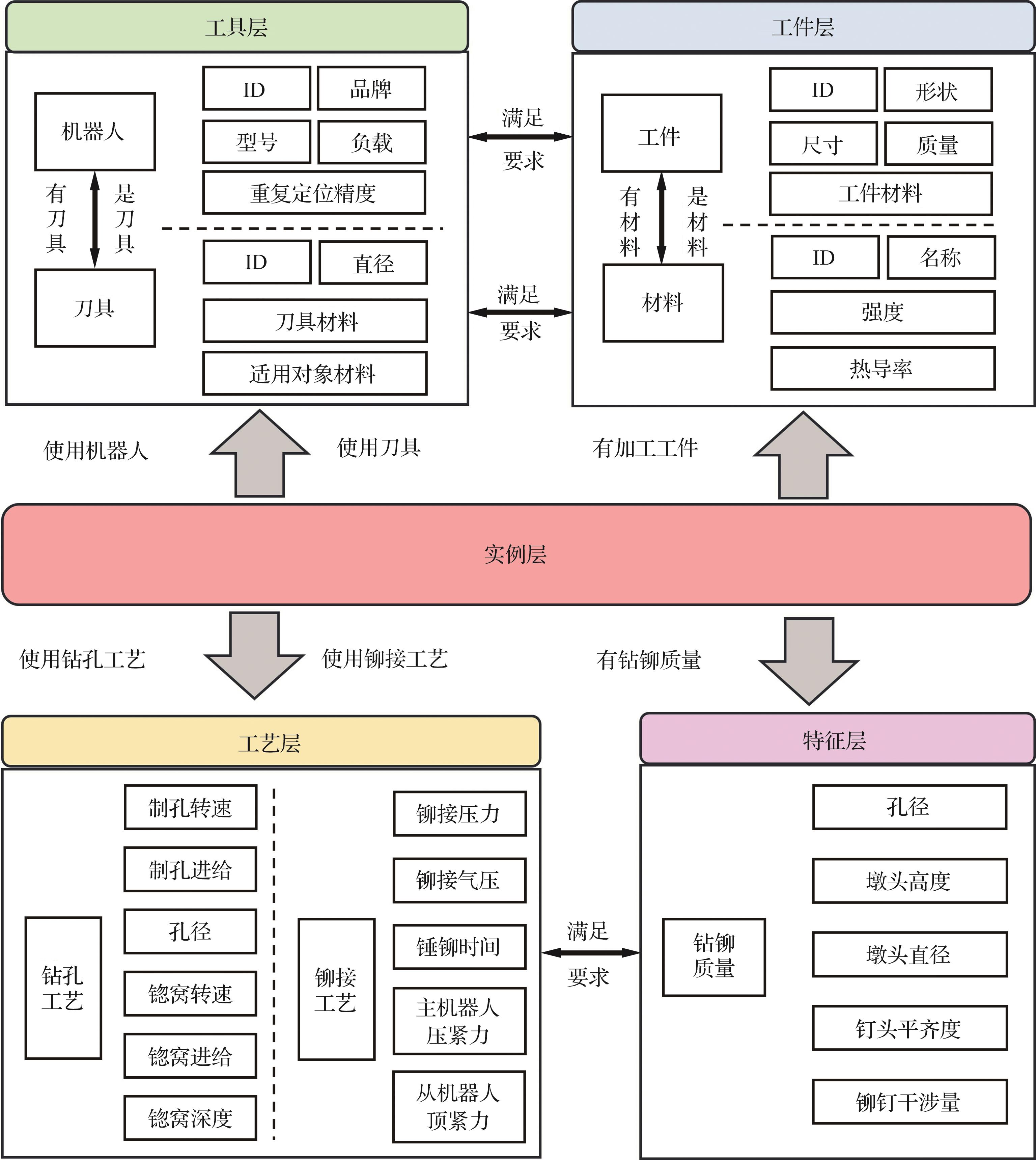
Table 2
Tripartite table based on ontology model
| 实体 | 关系/属性 | 实体/数值 |
|---|---|---|
| 机器人 | 是ID 有名称 有品牌 有型号 有负载 有重复定位精度 | 机器人1 IRB 120 ABB IRB 120 3 kg 0.01 mm |
| 机器人组合 | 是ID 有机器人 | 机器人组合1 机器人1、机器人2 |
| 工具 | 是ID 有直径 有刀具材料 有适用材料 | 刀具1 5 mm 硬质合金 铝合金 |
| 工件 | 是ID 有材料 有质量 有形状 有长 有宽 有厚度 有复杂度 | 工件1 材料1 200 kg 平面1 2 000 mm 2 000 mm 20 mm 0.2 |
| 材料 | 是ID 有牌号 有强度 有热导率 | 材料1 2060 T8E 572 MPa 140 |
| 钻孔工艺 | 是ID 有孔径 有制孔转速 有制孔进给 有锪窝转速 有锪窝进给 有深度 | 钻孔工艺1 5 mm 3 000 r/min 125 mm/s 1 000 r/min 100 mm·s-1 5 mm |
| 铆接工艺 | 是ID 有铆钉型号 有顶铁气压 有铆接压力 有锤铆时间 有压紧力 有顶紧力 | 铆接工艺1 KE5-5 0.22 kN 0.4 MPa 3 s 450 N 350 N |
| 钻铆质量 | 是ID 有墩头高度 有墩头直径 有铆钉干涉量 有钉头平齐度 | 钻铆质量1 2 mm 7 mm 0.05 mm 0.03 mm |
| 动作 | 是ID 使用机器人 使用工具 使用钻孔工艺 使用铆接工艺 有工件 有结果 | 钻铆执行1 机器人组合1 刀具1 钻孔工艺1 铆接工艺1 工件1 钻铆质量1 |

Fig.4
Knowledge graph for dual-robot drilling and riveting process
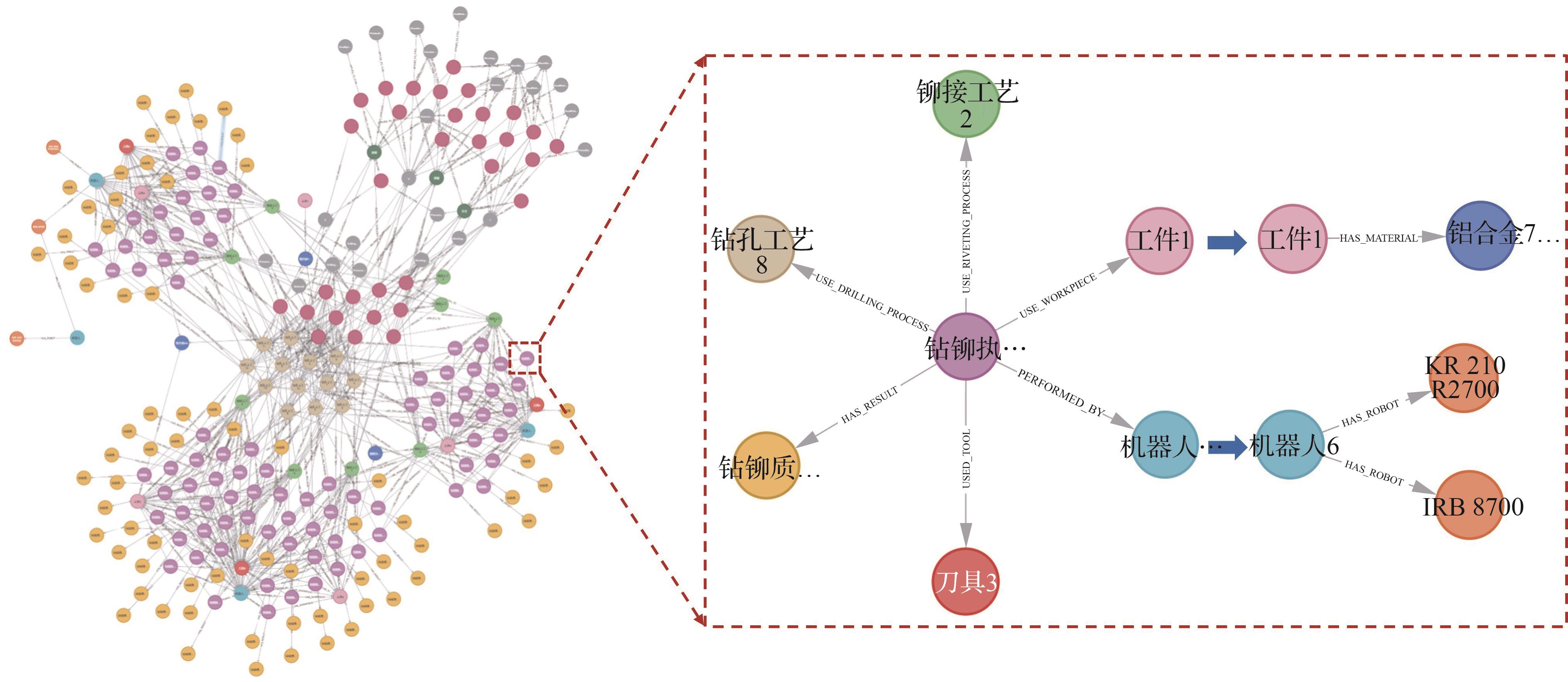
Table 3
Key characteristic parameters
| 参数 | 特征/单位 |
|---|---|
| X1 | 墩头高度/mm |
| X2 | 墩头直径/mm |
| X3 | 铆接干涉量/mm |
| X4 | 钉头平齐度/mm |
| X5 | 材料强度/MPa |
| X6 | 工件质量/kg |
Fig.5
Experimental result of sensitivity analysis on weight matrix
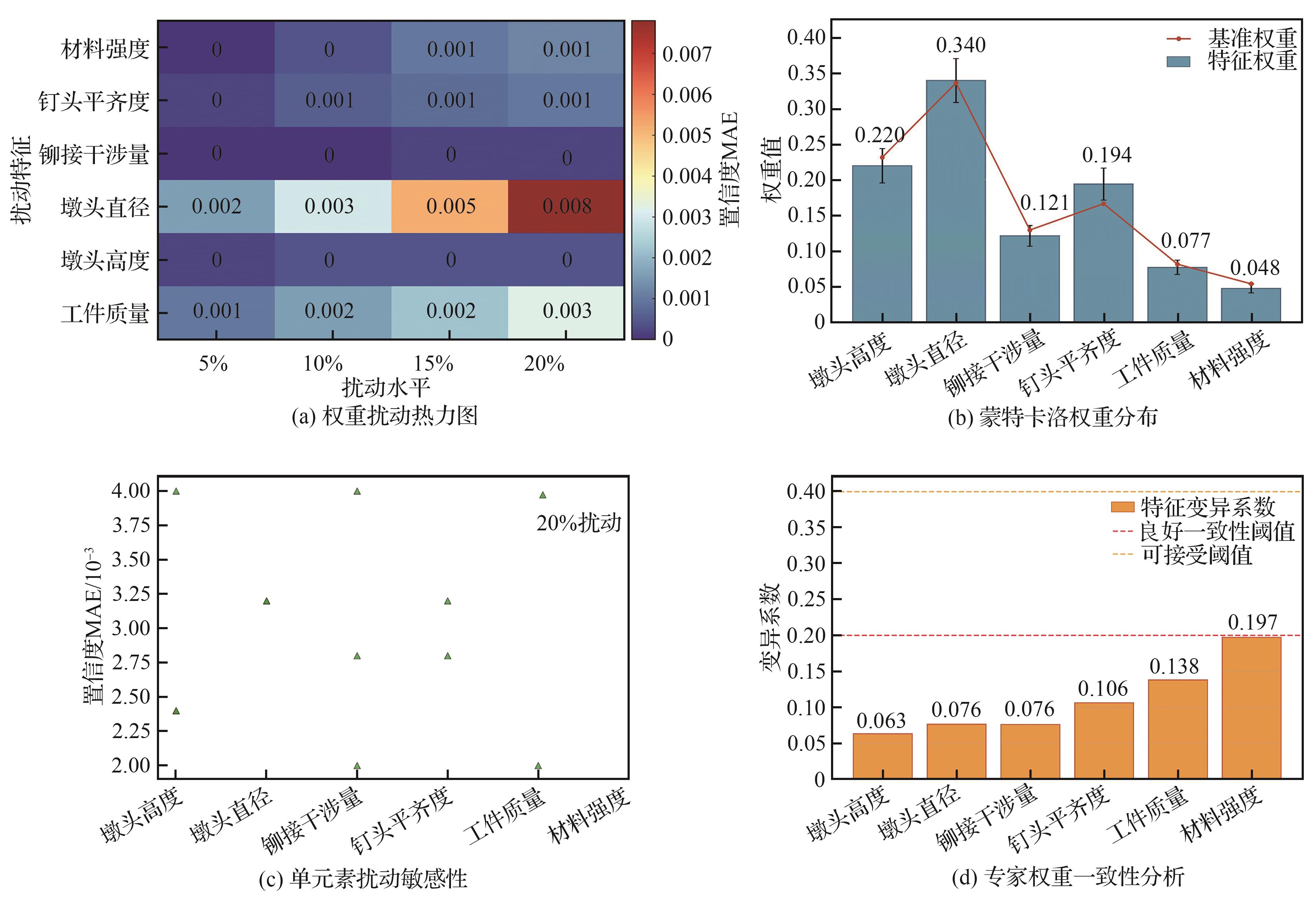
Table 4
Dual-robot drilling and riveting process rules
| 规则分类 | 规则编号 | 触发条件 | 推荐措施 |
|---|---|---|---|
| 安全规则 | IC-01 | 连续3次干涉量>0.08 mm | 更换高刚性刀具(抗弯≥2 000 MPa),分步钻削工艺 |
| RH-01 | 墩头高度>上限(2.05 mm) | 铆接力×0.95 | |
| RG-01 | 工件质量>550 kg | 报警:更换更高负载机型 | |
| … | … | … | |
| 质量规则 | IC-02 | 叠层厚度差ΔH>0.1 mm | 转速=基准转速×(1+0.075ΔH) |
| SF-01 | 平齐度<0.05 mm | 进给速度×0.9 | |
| SF-02 | 平齐度<0.05 mm | 振动幅度>3 μm时更换高负载机器人组 | |
| SF-03 | 毛刺高度>0.04 mm | 铆接力×0.9 | |
| … | … | … | |
| 效率规则 | MA-01 | 材料=钛合金 | 基准转速=4 000+孔径×500,铆接力≤1.2 kN,陶瓷刀具 |
| SF-04 | 毛刺高度>0.04 mm | 进行刀具磨损检测 | |
| … | … | … |
Table 5
Search boundary setting of parameters
| 参数 | 描述 | 初值 | 下界 | 上界 |
|---|---|---|---|---|
| 安全规则权重 | 1.5 | 1.2 | 2.0 | |
| 质量规则权重 | 1.2 | 1.0 | 1.8 | |
| 效率规则权重 | 1.0 | 0.8 | 1.3 | |
| 案例上限 | 15 | 8 | 15 | |
| 分布阈值 | 0.2 | 0.05 | 0.3 |
Table 6
Optimal parameter configuration
| 参数 | 描述 | 最优值 |
|---|---|---|
| 安全规则权重 | 1.59 | |
| 质量规则权重 | 1.08 | |
| 效率规则权重 | 0.88 | |
| 案例上限 | 8 | |
| 分布阈值 | 0.15 |

Fig.6
Dynamic confidence assessment process
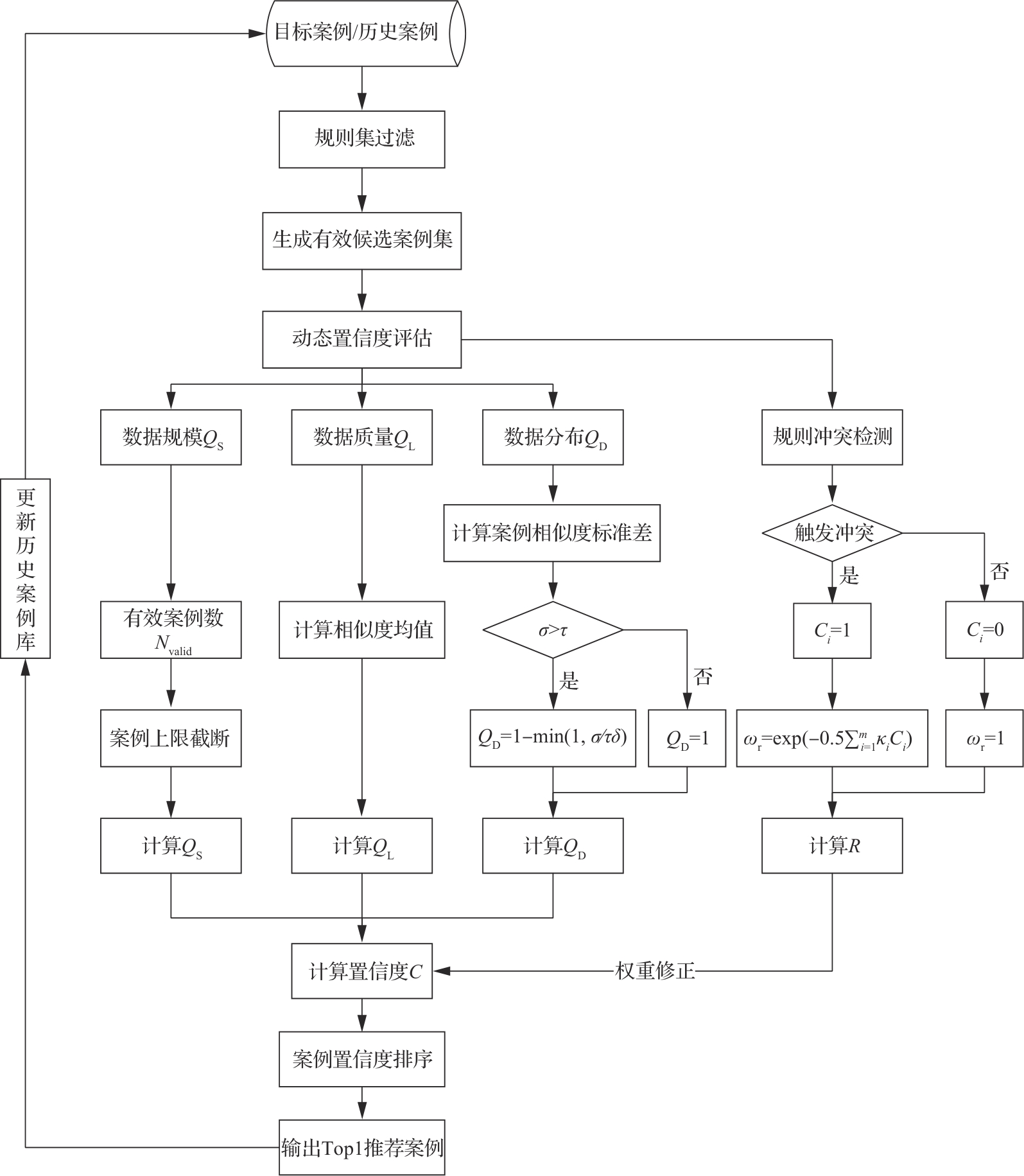

Fig.7
Visualization interface of parameter recommendation system for dual-robot drilling and riveting process
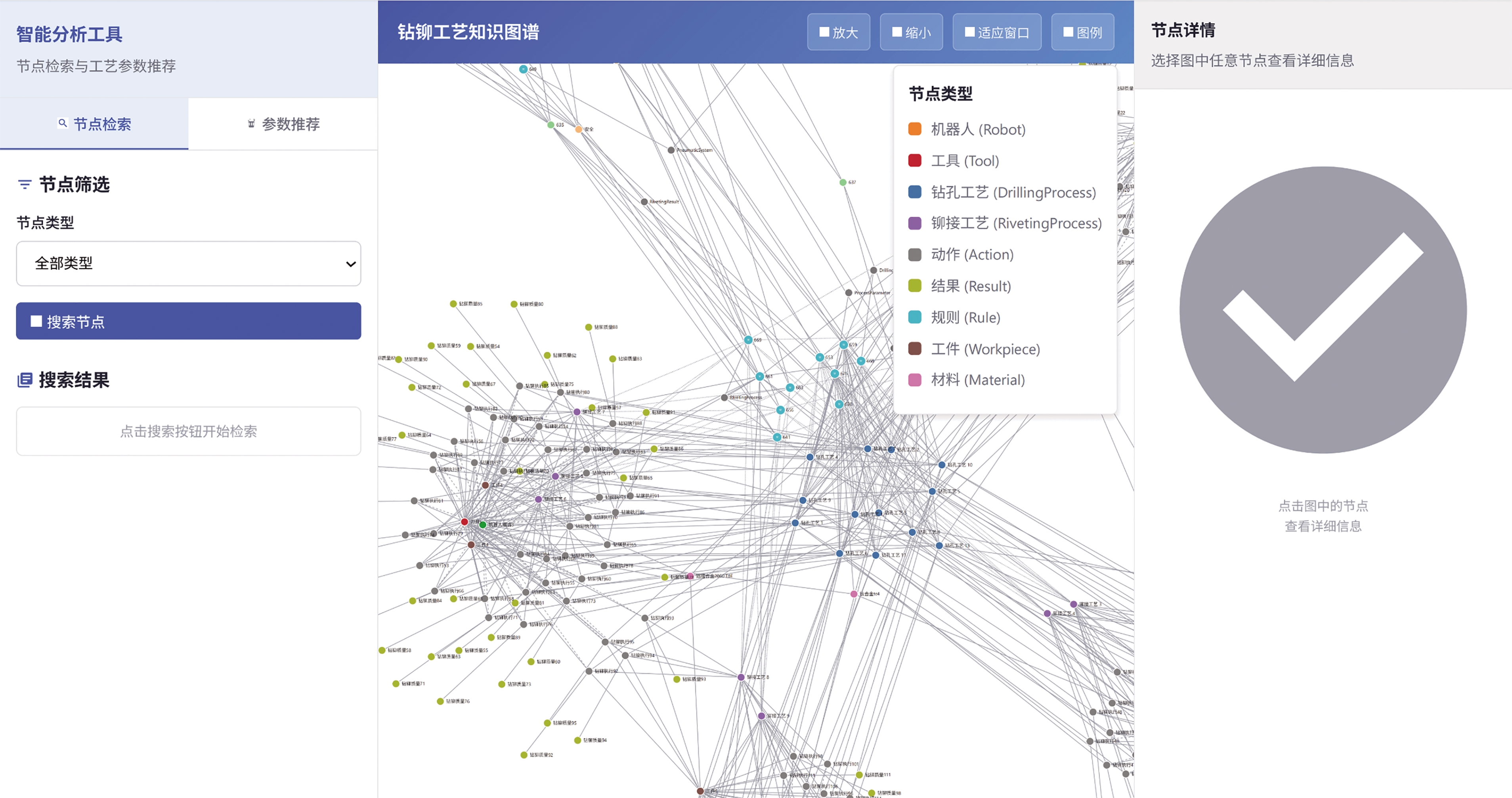

Fig.8
Node query of parameter recommendation system for dual-robot drilling and riveting process
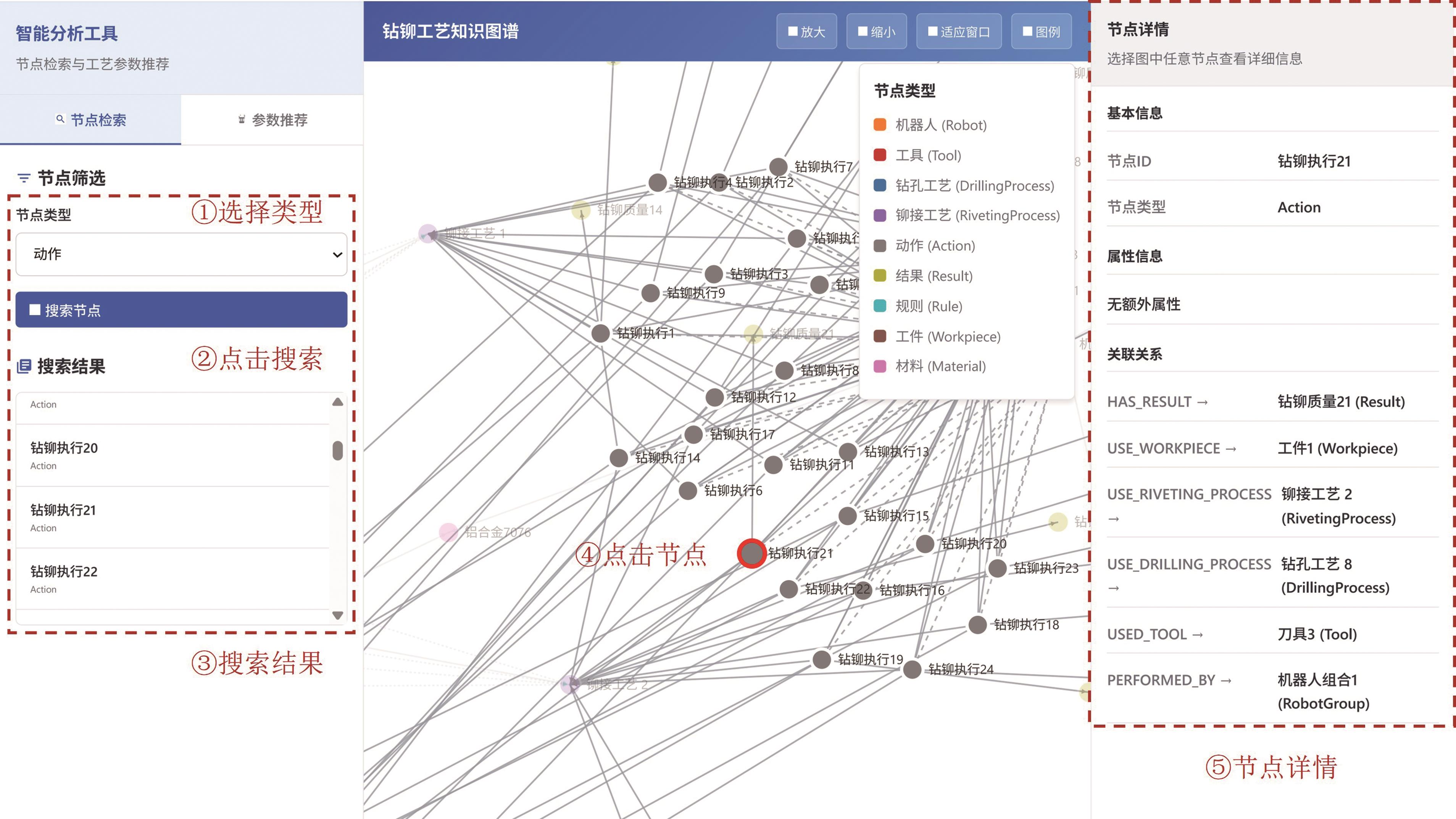
Table 7
Quality requirements for workpiece process(Case 1)
| 参数 | 工艺要求 |
|---|---|
| 材料 | 铝锂合金2060 T8E |
| 工件质量/kg | 100 |
| 孔径/mm | 5 |
| 墩头高度/mm | 2 |
| 墩头直径/mm | 7 |
| 铆接干涉量/mm | 0.05 |
| 钉头平齐度/mm | 0.03 |
Table 8
Similar cases of dual-robot drilling and riveting parameters
| 参数 | 案例1 | 案例2 | 案例3 | 案例4 | 案例5 |
|---|---|---|---|---|---|
| 钻孔进给/(mm·min-1) | 100 | 125 | 225 | 125 | 260 |
| 制孔转速/(r·min-1) | 4 300 | 4 000 | 4 500 | 3 000 | 5 000 |
| 锪窝转速/(r·min-1) | 1 360 | 1 000 | 1 600 | 1 000 | 1 800 |
| 锪窝进给/(mm·min-1) | 140 | 110 | 180 | 100 | 240 |
| 铆接压力/kN | 0.4 | 0.4 | 0.4 | 0.4 | 0.4 |
| 铆接气压/MPa | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 |
| 锤铆时间/s | 2 | 2 | 2 | 2 | 2 |
| 压紧力/N | 450 | 450 | 450 | 450 | 450 |
| 顶紧力/N | 350 | 350 | 350 | 350 | 350 |
| 刀具 | 刀具3 | 刀具3 | 刀具3 | 刀具3 | 刀具3 |
| 机器人组合 | KR500+IRB8700 | KR500+IRB8700 | KR500+IRB8700 | KR500+IRB8700 | KR500+IRB8700 |
| 相似度 | 0.90 | 0.88 | 0.90 | 0.89 | 0.87 |

Fig.9
Parameter recommendation for dual-robot drilling and riveting process
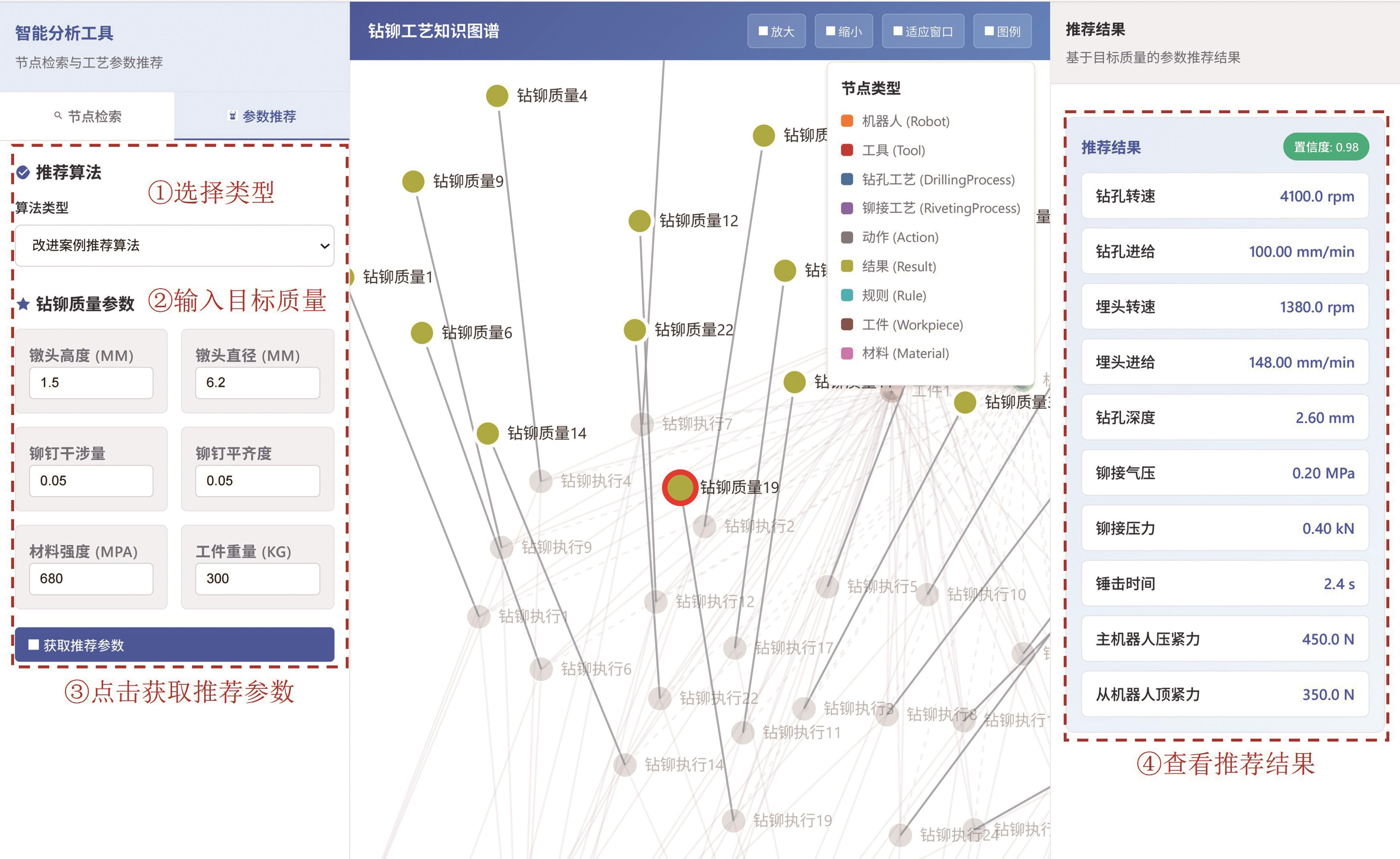
Table 9
Recommended process parameters(Case 1)
| 参数 | 原始推荐 | PCA 推荐 | 改进推荐 | 真实参数 | |
|---|---|---|---|---|---|
| 钻孔进给/(mm·min-1) | 150 | 164 | 100 | 150 | |
| 制孔转速/(r·min-1) | 4 500 | 3 600 | 4 300 | 4 000 | |
| 锪窝转速/(r·min-1) | 1 800 | 1 300 | 1 420 | 1 500 | |
| 锪窝进给/(mm·min-1) | 110 | 143 | 148 | 110 | |
| 铆接压力/kN | 0.4 | 0.5 | 0.4 | 0.4 | |
| 铆接气压/MPa | 0.2 | 0.2 | 0.2 | 0.2 | |
| 锤铆时间/s | 2.0 | 1.9 | 2.4 | 2.5 | |
| 压紧力/N | 400 | 470 | 450 | 500 | |
| 顶紧力/N | 400 | 270 | 350 | 300 | |
| 刀具 | 刀具3 | 刀具3 | 刀具3 | ||
| 机器人组合 | KR500 IRB8700 | KR500 IRB8700 | KR500 IRB8700 | ||
| 案例相似度 | 0.82 | 0.86 | 0.89 | ||
| 综合置信度 | 0.89 | 0.88 | 0.92 | ||
Table 10
Quality requirements for workpiece process(Case 2)
| 参数 | 工艺要求 |
|---|---|
| 材料 | 钛合金TC4 |
| 工件质量/kg | 120 |
| 孔径/mm | 5 |
| 墩头高度/mm | 2.20 |
| 墩头直径/mm | 6.20 |
| 铆接干涉量/mm | 0.10 |
| 钉头平齐度/mm | 0.07 |
Table 11
Rule constrained adjustment of recommended process parameters(Case 2)
| 参数 | 基线推荐 | PCA推荐 | 加权推荐 | 规则修正 |
|---|---|---|---|---|
| 钻孔进给/(mm·min-1) | 未 找 到 相 似 案 例 | 184 | 162 | 150 |
| 制孔转速/(r·min-1) | 3 994 | 4 500 | 6 500 | |
| 锪窝转速/(r·min-1) | 1 539 | 1 520 | 1 500 | |
| 锪窝进给/(mm·min-1) | 169 | 100 | 110 | |
| 铆接压力/kN | 0.6 | 0.4 | 0.4 | |
| 铆接气压/MPa | 0.2 | 0.2 | 0.2 | |
| 锤铆时间/s | 2.3 | 2.2 | 2.5 | |
| 压紧力/N | 500 | 450 | 450 | |
| 顶紧力/N | 260 | 350 | 350 | |
| 刀具 | 刀具3 | 刀具3 | 更换陶瓷刀具 | |
| 机器人组合 | KR300+KR300 | KR300+KR300 | KR300+KR300 | |
| 案例相似度 | 0.64 | 0.74 | 0.82 | |
| 综合置信度 | 0.78 | 0.81 | 0.84 |
Table 12
Recommended process parameter under new working condition
| 参数 | 推荐参数 | 历史最优参数 |
|---|---|---|
| 材料 | 7075 T6 | 2060 T8E |
| 工件质量/kg | 103 | 100 |
| 墩头高度/mm | 2.50 | 2 |
| 墩头直径/mm | 7.50 | 7 |
| 铆接干涉量/mm | 0.05 | 0.05 |
| 钉头平齐度/mm | 0.05 | 0.03 |
| 孔径/mm | 5 | 5 |
| 钻孔进给/(mm·min-1) | 125 | 100 |
| 制孔转速/(r·min-1) | 4 720 | 4 300 |
| 锪窝转速/(r·min-1) | 1 200 | 1 360 |
| 锪窝进给/(mm·min-1) | 110 | 140 |
| 铆接压力/kN | 0.4 | 0.4 |
| 铆接气压/MPa | 0.35 | 0.2 |
| 锤铆时间/s | 1.75 | 2 |
| 压紧力/N | 500 | 450 |
| 顶紧力/N | 350 | 350 |
| 刀具 | 刀具3 | 刀具3 |
| 机器人组合 | KR300+KR300 | KR300+KR300 |
| 案例相似度 | 0.91 | |
| 综合置信度 | 0.93 |
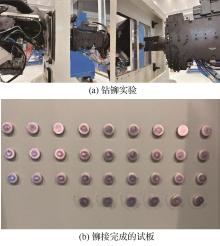
Fig.10
Experiment of dual-robot drilling and riveting
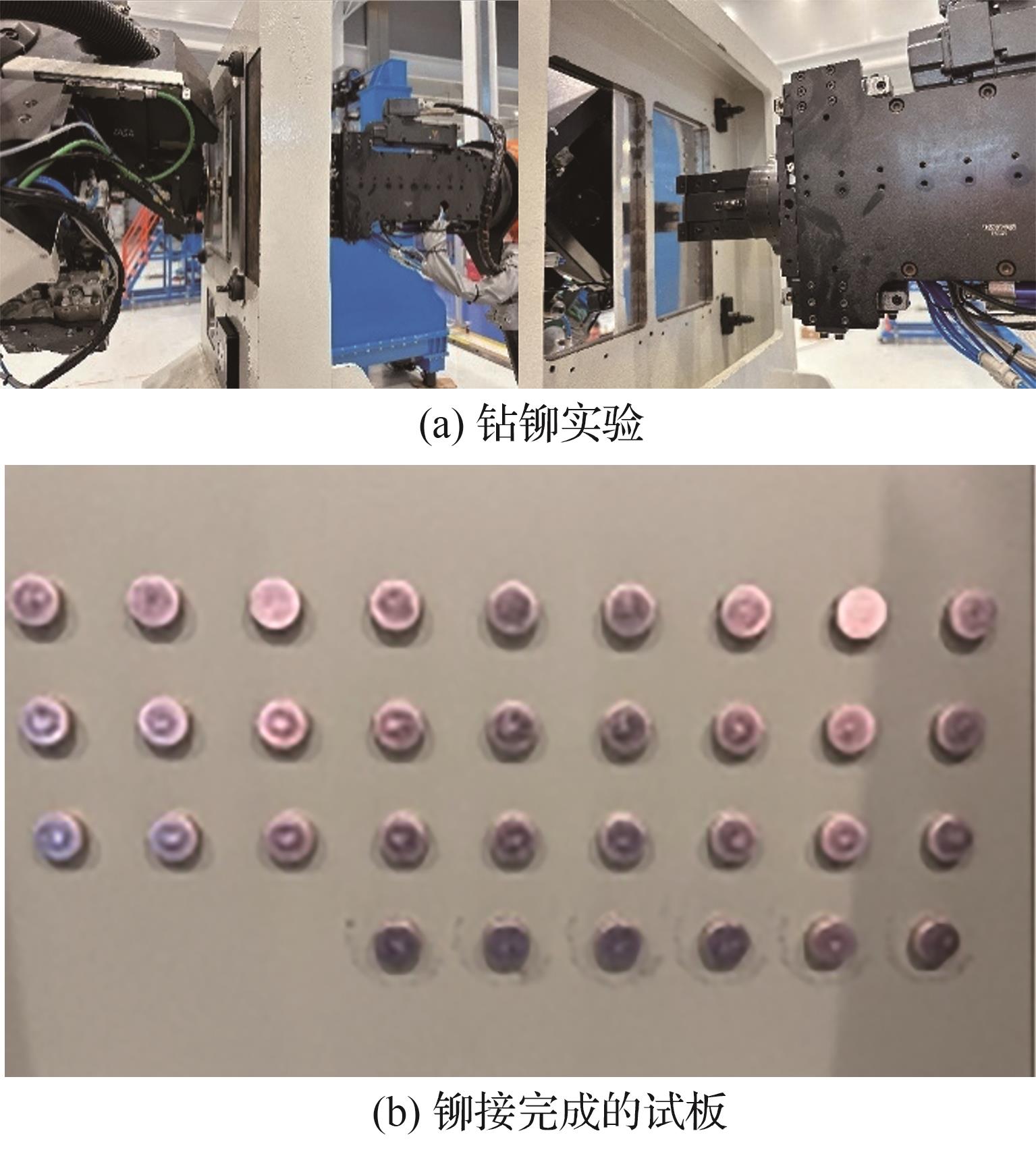
Table 13
Experiment measurement result of dual-robot drilling and riveting
| 序号 | 墩头高度/mm | 墩头直径/mm | 铆接干涉量/mm | 钉头平齐度/mm |
|---|---|---|---|---|
| 1 | 2.35 | 7.67 | 0.05 | 0.03 |
| 2 | 2.51 | 7.28 | 0.04 | 0.06 |
| 3 | 2.71 | 7.31 | 0.03 | 0.03 |
| 4 | 2.58 | 7.26 | 0.03 | 0.04 |
| 5 | 2.63 | 7.28 | 0.05 | 0.05 |
| 6 | 2.19 | 7.31 | 0.05 | 0.02 |
| 7 | 2.38 | 7.60 | 0.04 | 0.03 |
| 8 | 2.61 | 7.30 | 0.03 | 0.03 |
| 9 | 2.67 | 7.31 | 0.05 | 0.06 |
| 10 | 2.59 | 7.20 | 0.04 | 0.06 |
| 11 | 2.35 | 7.67 | 0.05 | 0.03 |
| 12 | 2.51 | 7.28 | 0.03 | 0.02 |
| 13 | 2.71 | 7.31 | 0.05 | 0.01 |
| 14 | 2.58 | 7.26 | 0.06 | 0.03 |
| 15 | 2.63 | 7.28 | 0.07 | 0.04 |
| 16 | 2.63 | 7.31 | 0.07 | 0.02 |
| 17 | 2.19 | 7.60 | 0.08 | 0.04 |
| 18 | 2.38 | 7.30 | 0.07 | 0.02 |
| 19 | 2.61 | 7.30 | 0.14 | 0.04 |
| 20 | 2.67 | 7.20 | 0.09 | 0.04 |
| 21 | 2.63 | 7.03 | 0.06 | 0.01 |
| 22 | 2.94 | 7.00 | 0.07 | 0.04 |
| 23 | 2.81 | 7.00 | 0.08 | 0.03 |
| 24 | 2.56 | 7.45 | 0.06 | 0.04 |
| 25 | 2.66 | 6.93 | 0.08 | 0.03 |
| 26 | 2.38 | 7.05 | 0.08 | 0.03 |
| 27 | 2.32 | 7.50 | 0.07 | 0.04 |
| 28 | 2.79 | 7.12 | 0.09 | 0.04 |
| 29 | 2.66 | 7.04 | 0.09 | 0.03 |
| 30 | 2.31 | 6.92 | 0.09 | 0.02 |
| 平均值 | 2.55 | 7.27 | 0.06 | 0.03 |
| 标准差 | 0.178 | 0.201 | 0.026 | 0.013 |
| [1] | MEI B, LIANG Z, XIE Y, et al. Positioning accuracy enhancement of a robotic assembly system for thin-walled aerostructure assembly [J]. Journal of Industrial Information Integration, 2023, 35: 100518. |
| [2] | CHRISTIAN H, GUDRUN F, NIKOLAUS S, et al. Production planning optimisation for composite aerospace manufacturing [J]. International Journal of Production Research,2018, 57(18): 5857-5873. |
| [3] | ANDREY K, MIKHAIL T, MIKHAIL K. Multivariate manufacturing process planning for aircraft airframe production based on weighted criteria analysis [J]. The International Journal of Advanced Manufacturing Technology, 2021, 117: 2263-8. |
| [4] | KO H, WITHERELL P, LU Y, et al. Machine learning and knowledge graph based design rule construction for additive manufacturing[J]. Additive Manufacturing, 2021, 37: 101620. |
| [5] | SERGIO I, RAQUEL T L. An approach for proactive mobile recommendations based on user-defined rules [J]. Expert Systems with Applications, 2024, 242: 122714. |
| [6] | SUBRAMANYA N, KUMAR A R S, VIKAS Y, et al. Manufacturing process planning in aerospace systems [J]. IOP Conference Series: Materials Scienceand Engineering, 2022, 1258 (1): 12027. |
| [7] | ZHANG C, ZHOU G, HU J, et al. Deep learning enabled intelligent process planning for digital twin manufacturing cell [J]. Knowledge-Based Systems, 2020, 191: 105247. |
| [8] | XIA L, LIANG Y, LENG J, et al. Maintenance planning recommendation of complex industrial equipment based on knowledge graph and graph neural network [J]. Reliability Engineering & System Safety, 2023, 232: 109068. |
| [9] | WU S, SUN F, ZHANG W, et al. Graph neural networks in recommender systems: a survey [J]. ACM Computing Surveys, 2022, 55(5): 1-37. |
| [10] | TIAN L, ZHOU X, WU Y, et al. Knowledge graph and knowledge reasoning: a systematic review [J]. Journal of Electronic Science and Technology, 2022, 20(2): 100159. |
| [11] | CHEN X, JIA S, XIANG Y. A review: knowledge reasoning over knowledge graph [J]. Expert Systemswith Applications, 2020, 141: 122948. |
| [12] | GUO L, YAN F, LI T, et al. An automatic method for constructing machining process knowledge base from knowledge graph [J]. Robotics and Computer-Integrated Manufacturing, 2022, 73: 102222. |
| [13] | LIU M, LI X, LI J, et al. A knowledge graph-based data representation approach for IIoT-enabled cognitive manufacturing [J]. Advanced Engineering Informatics, 2022, 51: 101515. |
| [14] | HUANG Z, GUO X, LIU Y, et al. A smart conflict resolution model using multi-layer knowledge graph for conceptual design [J]. Advanced Engineering Informatics, 2023, 55: 108887. |
| [15] | SU C, JIANG Q, HAN Y, et al. Knowledge graph-driven decision support for manufacturing process: a graph neural network-based knowledge reasoning approach [J]. Advanced Engineering Informatics, 2025, 64: 103098. |
| [16] | LI X, ZHANG S, HUANG R, et al. Structural modeling of heterogeneous CAM model based on process knowledge graph [J]. Journal of Computer-Aided Design & Computer Graphics, 2018, 30(7): 1342-1355. |
| [17] | WEN P, MA Y, WANG R. Systematic knowledge modeling and extraction methods for manufacturing process planning based on knowledge graph [J]. Advanced Engineering Informatics, 2023, 58: 102172. |
| [18] | XIAO B, ZHAO Z, XU B, et al. A novel method for intelligent reasoning of machining step sequencesbased on deep reinforcement learning [J]. Journal of Manufacturing Systems, 2025, 80: 626-642. |
| [19] | HU Y, ADRIANE C, WEN G, et al. What can knwledge bring to machine learning? —a survey of low-shot learning for structured data [J]. ACM Transactions on Intelligent Systems and Technology, 2022, 13(3): 1-45. |
| [20] | LIU S, STEBNER A P, KAPPES B B, et al. Machine learning for knowledge transfer across multiple metals additive manufacturing printers [J]. Additive Manufacturing, 2021, 39: 101877. |
| [21] | JOAO M, LUIS G T, ANDRÉ C R, et al. A novel jigless process applied to a robotic cell for aircraft structural assembly [J]. The International Journal of Advanced Manufacturing Technology, 2020, 109: 1177-1187. |
| [22] | GUO S, AGARWAL M, COOPER C, et al. Machine learning for metal additive manufacturing: towards a physics-informed data-driven paradigm [J]. Journal of Manufacturing Systems, 2022, 62: 145-163. |
| [23] | 陈勇刚, 刘康妮, 王帅. 基于BiGRU-Attention改进的航空设备故障知识图谱构建 [J]. 航空学报, 2024, 45(18): 229916. |
| CHEN Y G, LIU K N, WANG S. Fault knowledge graph construction for aviation equipment based on BiGRU-Attention improvement [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(18): 229916 (in Chinese). | |
| [24] | 聂同攀, 曾继炎, 程玉杰, 等. 面向飞机电源系统故障诊断的知识图谱构建技术及应用 [J]. 航空学报, 2022, 43(8): 625499. |
| NIE T P, ZENG J Y, CHENG Y J, et al. Knowledge graph construction technology and its application in aircraft power system fault diagnosis [J]. Acta Aeronautica et Astronautica Sinica, 2022,43(8): 625499 (in Chinese). | |
| [25] | CASTRESE D M, ANDREA R, AGNESE P, et al. An interactive graph-based tool to support the designing of human-robot collaborative workplaces [J]. International Journal on Interactive Design and Manufacturing, 2023, 18: 6255-6270. |
| [26] | 肖彪, 徐宝德, 彭仕鑫, 等. 基于知识图谱的复杂薄壁零件机械加工工艺知识建模研究 [J]. 航空制造技术, 2024, 67(11): 76-86. |
| XIAO B, XU B D, PENG S X, et al. Study on machining knowledge modeling of complex thin-walled parts based on knowledge graph [J]. Aeronautical Manufacturing Technology, 2024, 67(11): 76-86 (in Chinese). | |
| [27] | GUO L, LI X, YAN F, et al. A method for constructing a machining knowledge graph using an improved transformer [J]. Expert Systems with Applications, 2024, 237: 121448. |
| [28] | XIONG C, XIAO J, LI Z, et al. Knowledge graph network-driven process reasoning for laser metal additive manufacturing based on relation mining [J]. Applied Intelligence, 2024, 54(22): 11472-11483. |
| [29] | HUANG Z C, GUO X, CHONG J,et al. mKGMPP: a multi-layer knowledge graph integration framework and its inference method for manufacturing process planning [J]. Advanced Engineering Informatics, 2025, 65: 103266. |
| [30] | ZHENG P, XIA L, LI C, et al. Towards self-X cognitive manufacturing network: an industrial knowledge graph-based multi-agent reinforcement learning approach [J]. Journal of Manufacturing Systems, 2021, 61: 16-26. |
| [31] | ZHOU B, HUA B, GU X, et al. An end-to-end tabular information-oriented causality event evolutionary knowledge graph for manufacturing documents [J]. Advanced Engineering Informatics, 2021, 50: 101441. |
| [32] | HUA Y, WANG R, WANG Z, et al. Knowledge graph with deep reinforcement learning for intelligent generation of machining process design [J]. Journal of Engineering Design, 2024, 36(11): 2072-2106. |
| [33] | SU C, HAN Y, JIANG Q, et al. Optimizing manufacturing process with knowledge graph-based adaptive neural network: approach to industry 5.0 consumer electronics [J]. IEEE Transactions on Consumer Electronics, 2025, 71(2): 4164-4178. |
| [34] | TIWARY N, MOHD N S A, FAUZI F, et al. Max explainability score-A quantitative metric for explainability evaluation in knowledge graph-based recommendations [J]. Computers and Electrical Engineering, 2024, 116: 109190. |
| [35] | WANG L, CHENG H, WANG R, et al. Machining scheme selection of features based on process knowledge graph and improved cosine similarity matching[J]. Machines, 2025, 13(3): 188. |
| [1] | Zuoxu WANG, Xin WANG, Shuang MENG, Lianyu ZHENG. A knowledge-user behavior-driven aircraft assembly tooling design knowledge recommendation approach [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 431417-431417. |
| [2] | Yonggang CHEN, Kangni LIU, Shuai WANG. Fault knowledge graph construction for aviation equipment based on BiGRU⁃Attention improvement [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(18): 229916-229916. |
| [3] | CAO Ming, WANG Peng, ZUO Hongfu, ZENG Haijun, SUN Jianzhong, YANG Weidong, WEI Fang, CHEN Xuefeng. Current status, challenges and opportunities of civil aero-engine diagnostics & health management Ⅱ: Comprehensive off-board diagnosis, life management and intelligent condition based MRO [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 625574-625574. |
| [4] | NIE Tongpan, ZENG Jiyan, CHENG Yujie, MA Liang. Knowledge graph construction technology and its application in aircraft power system fault diagnosis [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 625499-625499. |
| [5] | CHEN Ao, XIE Yongchun, WANG Yong, LI Linfeng. Deep graph reasoning method for satellite component detection [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 525045-525045. |
| [6] | XI Ping, ZHANG Baoyuan, NING Tao. Intelligent Product Design Based on Open Knowledge Representation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2012, 33(9): 1746-1754. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341