Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (4): 328735-328735.doi: 10.7527/S1000-6893.2023.28735
• Electronics and Electrical Engineering and Control • Previous Articles
Weiqing LAI, Jiuqing WAN( )
)
Received:2023-03-22
Revised:2023-05-05
Accepted:2023-07-27
Online:2023-08-07
Published:2023-08-04
Contact:
Jiuqing WAN
E-mail:wanjiuqing@buaa.edu.cn
Supported by:CLC Number:
Weiqing LAI, Jiuqing WAN. Distributed relative positioning of aircraft group based on path⁃sum algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328735-328735.

Fig.1
Relative positioning of aircraft group based on inertial navigation/data link
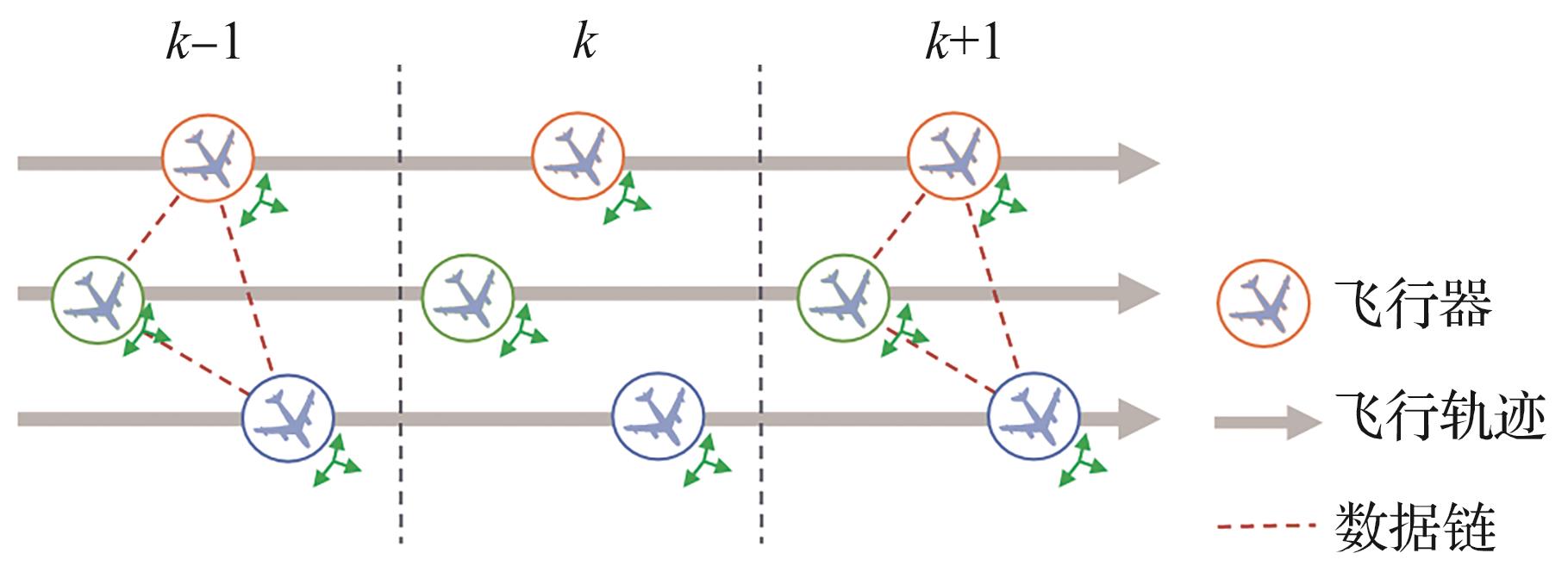
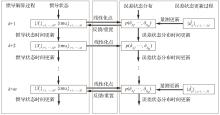
Fig.2
Distributed relative positioning process of aircraft cluster


Fig.3
Aircraft group error states update process


Fig.4
Aircraft group decomposition
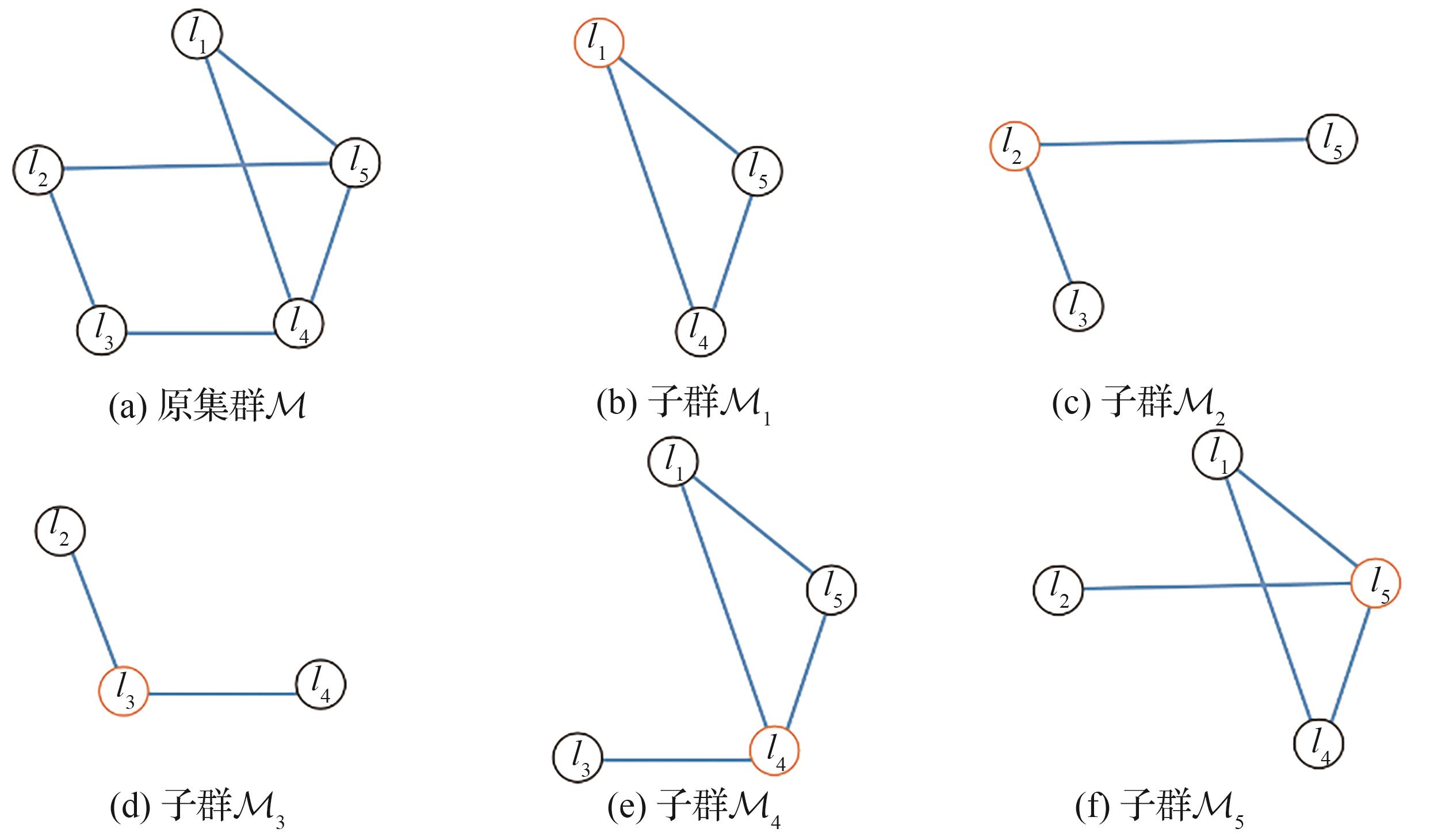
Table 1
Initial state error
| 初始误差 | 失准角/( | 速度误差/( | 位置误差/m |
|---|---|---|---|
| 东向 | 0.5 | 0.1 | 1 |
| 北向 | 0.5 | 0.1 | 1 |
| 天向 | 20 | 0.1 | 3 |
Table 2
Parameters of each sensor
| 传感器 | 加速度计(100 Hz) | 陀螺仪(100 Hz) | 数据链(10 Hz) | ||
|---|---|---|---|---|---|
| 加计常值偏值/μg | 速度随机游走/ (μg· | 陀螺常值漂移/((°)·h-1) | 角度随机游走/((°)· | 距离观测误差/m | |
| 参数 | 50 | 10 | 0.01° | 0.001° | 10 |
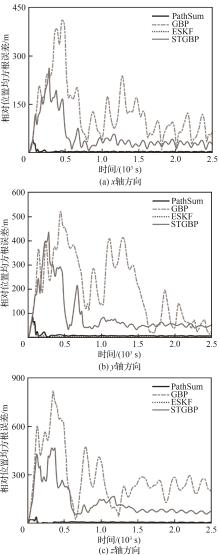
Fig.5
Relative position root mean square error

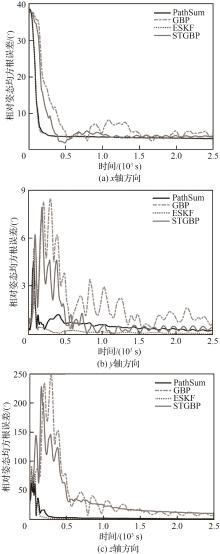
Fig.6
Relative attitude root mean square error
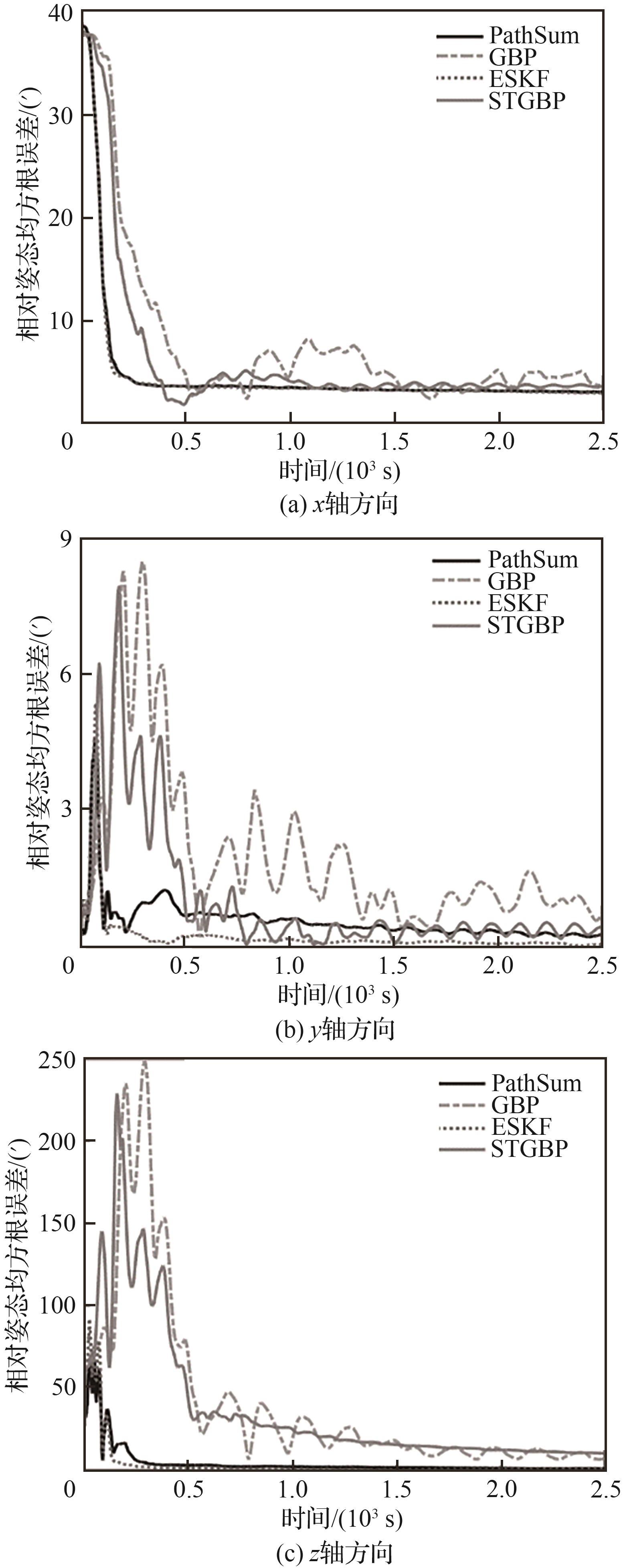
Table 3
Mean of relative position total root mean square error and standard deviation
| 算法 | 相对位置总均方根误差均值/m | 相对位置总均方根误差标准差/m | ||||
|---|---|---|---|---|---|---|
| x轴方向 | y轴方向 | z轴方向 | x轴方向 | y轴方向 | z轴方向 | |
| ESKF | 2.021 3 | 4.046 7 | 5.382 6 | 0.101 1 | 0.224 3 | 0.516 6 |
| GBP | 126.834 3 | 203.776 2 | 288.133 1 | 9.126 9 | 11.968 4 | 23.673 7 |
| STGBP | 56.025 0 | 101.642 9 | 145.815 1 | 6.588 8 | 7.909 8 | 13.898 0 |
| 路径和 | 3.559 1 | 7.807 4 | 9.566 6 | 0.429 7 | 0.880 9 | 1.665 4 |
Table 4
Mean of relative attitude total root mean square error and standard deviation
| 算法 | 相对姿态总均方根误差均值/( | 相对姿态总均方根误差标准差/( | ||||
|---|---|---|---|---|---|---|
| x轴方向 | y轴方向 | z轴方向 | x轴方向 | y轴方向 | z轴方向 | |
| ESKF | 4.604 6 | 0.253 5 | 3.344 2 | 0.120 8 | 0.062 7 | 0.260 2 |
| GBP | 7.816 0 | 2.015 0 | 41.197 7 | 0.090 5 | 0.137 4 | 1.242 5 |
| STGBP | 6.180 7 | 1.019 5 | 37.131 0 | 0.723 3 | 0.466 1 | 9.181 2 |
| 路径和 | 4.687 7 | 0.597 9 | 4.422 7 | 0.066 3 | 0.156 4 | 0.587 5 |
Table 5
Algorithm running time
| 算法 | 惯导更新/ ms | 时间更新/ ms | 量测更新/ ms | 总耗时/s |
|---|---|---|---|---|
| ESKF | 0.33 | 0.20 | 11.23 | 413.25 |
| GBP | 0.33 | 0.09 | 4.33 | 213.26 |
| STGBP | 0.33 | 0.09 | 8.77 | 324.25 |
| 路径和 | 0.33 | 0.13 | 6.05 | 303.75 |
| 1 | 向锦武, 董希旺, 丁文锐, 等. 复杂环境下无人集群系统自主协同关键技术[J]. 航空学报, 2022, 43(10): 527570. |
| XIANG J W, DONG X W, DING W R, et al. Key technologies for autonomous cooperation of unmanned swarm systems in complex environments[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(10): 527570 (in Chinese). | |
| 2 | 冯培德, 谢淑香, 张京娟. 机群组网定位的一种新途径[J]. 北京航空航天大学学报, 2006, 32(11): 1263-1267. |
| FENG P D, XIE S X, ZHANG J J. New approach for swarming aircraft positioning via network information[J]. Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(11): 1263-1267 (in Chinese). | |
| 3 | EDWARDS K L. Air⁃to⁃ground targeting—UAVs, data links and interoperability (project Extendor)[J]. The Aeronautical Journal (1968), 2004, 108: 493-504. |
| 4 | 李宏智. 战术数据链的发展与作战应用[J]. 舰船电子工程, 2010, 30(4): 1-5. |
| LI H Z. Development and operational application of tactical data links[J]. Ship Electronic Engineering, 2010, 30(4): 1-5 (in Chinese). | |
| 5 | INDIVERI G, PARLANGELI G. Further results on the observability analysis and observer design for single range localization in 3D[DB/OL]. arXiv preprint: 1308.0517, 2013. |
| 6 | DE PALMA D, INDIVERI G, PARLANGELI G. Multi-vehicle relative localization based on single range measurements[J]. IFAC-PapersOnLine, 2015, 48(5): 17-22. |
| 7 | 郝菁, 蔚保国, 何成龙. 基于惯导/数据链的动态相对定位方法[J]. 计算机测量与控制, 2018, 26(10): 191-195. |
| HAO J, YU B G, HE C L. Dynamic relative positioning method based on inertial navigation and data link[J]. Computer Measurement & Control, 2018, 26(10): 191-195 (in Chinese). | |
| 8 | 晏超然, 黄雪梅, 张康. 基于惯导/数据链测距的相对导航方法研究[J]. 计算机仿真, 2020, 37(5): 55-60, 109. |
| YAN C R, HUANG X M, ZHANG K. Relative navigation based on inertial navigation/data link ranging[J]. Computer Simulation, 2020, 37(5): 55-60, 109 (in Chinese). | |
| 9 | 张京娟, 雷昊东, 王学运, 等. 基于飞行器三维组网测距信息的导航误差估计技术研究[J]. 空天防御, 2020, 3(3): 124-130. |
| ZHANG J J, LEI H D, WANG X Y, et al. Research on navigation error estimation technology based on distance measurement information of aircraft three-dimensional network[J]. Air & Space Defense, 2020, 3(3): 124-130 (in Chinese). | |
| 10 | HUFF J E. Absolute and relative navigation of an sUAS swarm using integrated GNSS, inertial and range radios[D]. Ohio: Ohio University, 2018: 43-48. |
| 11 | 钟日进, 陈琪锋. 利用集群内测距和对目标测向的协同定位方法[J]. 航空学报, 2020, 41(S1): 723768. |
| ZHONG R J, CHEN Q F. Cooperative positioning method using distance measurement within a cluster and direction finding of a target[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723768 (in Chinese). | |
| 12 | 牛皓飞, 蔡庆中, 李健, 等. 基于图优化的通信受限环境下协同导航方法[J]. 航空学报, 2023, 44(11): 327342. |
| NIU H F, CAI Q Z, LI J, et al. Method for cooperative navigation in constrained environment based on graph optimization[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(11): 327342 (in Chinese). | |
| 13 | PEARL J. Probabilistic reasoning in intelligent systems - networks of plausible inference[M]. San Francisco: Morgan Kaufmann, 1988. |
| 14 | PEDERSEN C, PEDERSEN T, FLEURY B H. A variational message passing algorithm for sensor self-localization in wireless networks[C]∥ 2011 IEEE International Symposium on Information Theory Proceedings. Piscataway: IEEE Press, 2011: 2158-2162. |
| 15 | WANG S C, LUO F, JING X J, et al. Low-complexity message-passing cooperative localization in wireless sensor networks[J]. IEEE Communications Letters, 2017, 21(9): 2081-2084. |
| 16 | IHLER A T, FISHER J W, MOSES R L, et al. Nonparametric belief propagation for self-localization of sensor networks[J]. IEEE Journal on Selected Areas in Communications, 2005, 23(4): 809-819. |
| 17 | WYMEERSCH H, FERNER U, WIN M Z. Cooperative Bayesian self-tracking for wireless networks[J]. IEEE Communications Letters, 2008, 12(7): 505-507. |
| 18 | WYMEERSCH H, LIEN J, WIN M Z. Cooperative localization in wireless networks[J]. Proceedings of the IEEE, 2009, 97(2): 427-450. |
| 19 | CACERES M A, PENNA F, WYMEERSCH H, et al. Hybrid cooperative positioning based on distributed belief propagation[J]. IEEE Journal on Selected Areas in Communications, 2011, 29(10): 1948-1958. |
| 20 | MEYER F, HLINKA O, HLAWATSCH F. Sigma point belief propagation[J]. IEEE Signal Processing Letters, 2014, 21(2): 145-149. |
| 21 | KIM H, CHOI S W, KIM S. Connectivity information-aided belief propagation for cooperative localization[J]. IEEE Wireless Communications Letters, 2018, 7(6): 1010-1013. |
| 22 | NASERI H, KOIVUNEN V. A Bayesian algorithm for distributed network localization using distance and direction data[J]. IEEE Transactions on Signal and Information Processing Over Networks, 2019, 5(2): 290-304. |
| 23 | 万九卿, 布少聪, 钟丽萍. 基于混合动态信念传播的多无人机协同定位算法[J]. 北京航空航天大学学报, 2016, 42(5): 934-944. |
| WAN J Q, BU S C, ZHONG L P. Cooperative localization algorithm of multi-UAVs based on dynamic hybrid belief propagation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(5): 934-944 (in Chinese). | |
| 24 | BICKSON D. Gaussian belief propagation: Theory and aplication[DB/OL]. arXiv preprint: 0811.2518, 2008. |
| 25 | WU N, LI B, WANG H, et al. Distributed cooperative localization based on Gaussian message passing on factor graph in wireless networks[J]. Science China Information Sciences, 2015, 58(4): 1-15. |
| 26 | LI B, WU N, WANG H, et al. Gaussian message passing-based cooperative localization on factor graph in wireless networks[J]. Signal Processing, 2015, 111: 1-12. |
| 27 | LI B, WU N, WU Y C, et al. Convergence-guaranteed parametric Bayesian distributed cooperative localization[J]. IEEE Transactions on Wireless Communications, 2022, 21(10): 8179-8192. |
| 28 | GARCÍA-FERNÁNDEZ Á F, SVENSSON L, SÄRKKÄ S. Cooperative localization using posterior linearization belief propagation[J]. IEEE Transactions on Vehicular Technology, 2018, 67(1): 832-836. |
| 29 | MURPHY K, WEISS Y, JORDAN M I. Loopy belief propagation for approximate inference: An empirical study[DB/OL]. arXiv preprint: 1301.6725, 2013. |
| 30 | WEISS Y, FREEMAN W T. Correctness of belief propagation in Gaussian graphical models of arbitrary topology[J]. Neural Computation, 2001, 13(10): 2173-2200. |
| 31 | WAINWRIGHT M J, JAAKKOLA T S, WILLSKY A S. Tree-based reparameterization framework for analysis of sum-product and related algorithms[J]. IEEE Transactions on Information Theory, 2003, 49(5): 1120-1146. |
| 32 | MALIOUTOV D M, JOHNSON J K, WILLSKY A S. Walk-sums and belief propagation in Gaussian graphical models[J]. Journal of Machine Learning Research, 2006, 7: 2031-2064. |
| 33 | SU Q L, WU Y C. On convergence conditions of Gaussian belief propagation[J]. IEEE Transactions on Signal Processing, 2015, 63(5): 1144-1155. |
| 34 | LI B, WU Y C. Convergence of Gaussian belief propagation under general pairwise factorization: Connecting Gaussian MRF with pairwise linear Gaussian model[J]. Journal of Machine Learning Research, 2019, 20:1-30. |
| 35 | DU J, MA S D, WU Y C, et al. Convergence analysis of distributed inference with vector-valued Gaussian belief propagation[DB/OL]. arXiv preprint: 1611.02010, 2016. |
| 36 | FRANCOIS KAMPER. On the Convergence of Gaussian Belief Propagation with Nodes of Arbitrary Size[J]. Journal of Machine Learning Research, 2019, 20(165):1-37. |
| 37 | GISCARD P L, THWAITE S J, JAKSCH D. Evaluating matrix functions by resummations on graphs: The method of path-sums[J]. SIAM Journal on Matrix Analysis and Applications, 2013, 34(2): 445-469. |
| 38 | 马红皎, 吴华兵, 李梦, 等. 一种双向测距与时间同步系统的设计与分析[J]. 时间频率学报, 2014, 37(1): 18-24. |
| MA H J, WU H B, LI M, et al. Design and analysis of system of dual ranging and time synchronization[J]. Journal of Time and Frequency, 2014, 37(1): 18-24 (in Chinese). | |
| 39 | 严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019. |
| YAN G M, WENG J. Strapdown inertial navigation algorithm and integrated navigation principle[M]. Xi’an: Northwestern Polytechnical University Press, 2019 (in Chinese). | |
| 40 | Cormen T H, Leiserson C E, Rivest R L, et al. Introduction to algorithms massachusetts Institute of Technology[J]. Boston: Massachusetts Institute of Technology, 2009. |
| 41 | SOLÀ J. Quaternion kinematics for the error-state Kalman filter[DB/OL]. arXiv preprint: 1711.02508, 2017. |
| [1] | QI Liangang, HAN Yanze, WANG Yani, GUO Qiang, Kaliuzhny MYKOLA. Multi-component LFM interference suppression method based on chirp rate turning point and FrFT [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 326840-326840. |
| [2] | DONG Xinhao, ZHOU Zhijie, HU Changhua, FENG Zhichao, CAO You. Performance evaluation method for inertial system based on hierarchical belief rule base [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(7): 324456-324456. |
| [3] | ZHANG Hao, XIAO Yong, YANG Chaoxu, ZHANG Rui, XU Bin. Integrated navigation system based on fault detection using double state Chi-square test [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724271-724271. |
| [4] | LIANG Shuai, YANG Lin, YANG Zhaoxu, XU Bin. Kalman filter based T-S fuzzy control for morphing aircraft [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724274-724274. |
| [5] | GUAN Xiangzhong, CAI Chenxiao, ZHAI Wenhua, WANG Lei, SHAO Peng. Indoor integrated navigation system for unmanned aerial vehicles based on neural network predictive compensation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723790-723790. |
| [6] | CHEN Bing, ZHENG Yong, CHEN Zhanglei, ZHANG Houtian, LIU Xinjiang. A review of celestial navigation system on near space hypersonic vehicle [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(8): 623686-623686. |
| [7] | SONG Ningfang, YANG Yanqiang. Deep fusion navigation technology of missile-borne Stellar-INS with LFOV [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(8): 623674-623674. |
| [8] | LU Hang, HAO Shunyi, PENG Zhiying, HUANG Guorong. Application of marginal reduced high-degree cubature Kalman filter to nonlinear rapid transfer alignment [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2019, 40(3): 322390-322390. |
| [9] | FAN Yao, SHAO Xingyue, LI Qingdong, REN Zhang. Integrated 4D trajectory and attitude adaptive controller for civil aircraft [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2019, 40(2): 522437-522437. |
| [10] | QIAN Chao, ZHANG Zijian, LI Dawei. On-line reliability assessment of platform inertial navigation system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2017, 38(9): 321259-321259. |
| [11] | GUO Qi, ZHOU Zhaofa, SUN Lijiang, XU Zihao, CHEN He. Size parameters identification and rotation project design for single-axis rotary SINS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2017, 38(10): 320841-320841. |
| [12] | WU Yongliang, CAI Ya'nan, BAOYIN Hexi, XIONG Lichuan, LIU Shengchuan. Design of redundant fault-tolerant navigation system for near space UAV [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2016, 37(S1): 91-98. |
| [13] | LI Min, ZHANG Yingchun, GENG Yunhai, ZHU Baolong, LI Huayi. A robust extended Kalman filter algorithm for X-ray pulsar navigation system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2016, 37(4): 1305-1315. |
| [14] | ZHOU Qifan, ZHANG Hai, WANG Yanran. A redundant measurement adaptive Kalman filter algorithm [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2015, 36(5): 1596-1605. |
| [15] | ZHAO Xijing, WANG Lixin, HE Zhikun, ZHANG Bo. Reducted Twice Augmented Square-root Cubature Kalman Filter and Its Application [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2014, 35(8): 2286-2298. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341