Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (13): 531332.doi: 10.7527/S1000-6893.2024.31332
• Articles • Previous Articles
Ershen WANG1,2( ), Zexin LIU1, Deyan WANG3, Tengli YU4, Fanchen MENG3, Yayi LIU1, Song XU1
), Zexin LIU1, Deyan WANG3, Tengli YU4, Fanchen MENG3, Yayi LIU1, Song XU1
Received:2024-10-08
Revised:2024-12-30
Accepted:2025-03-28
Online:2025-03-31
Published:2025-03-28
Contact:
Ershen WANG
E-mail:wanges_2016@126.com
Supported by:CLC Number:
Ershen WANG, Zexin LIU, Deyan WANG, Tengli YU, Fanchen MENG, Yayi LIU, Song XU. Dual dynamic carrier positioning algorithm based on double factor graph and ambiguity optimization[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531332.
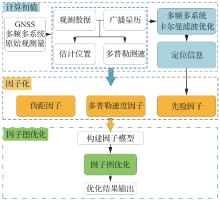
Fig.1
Main process of FGO-KF model
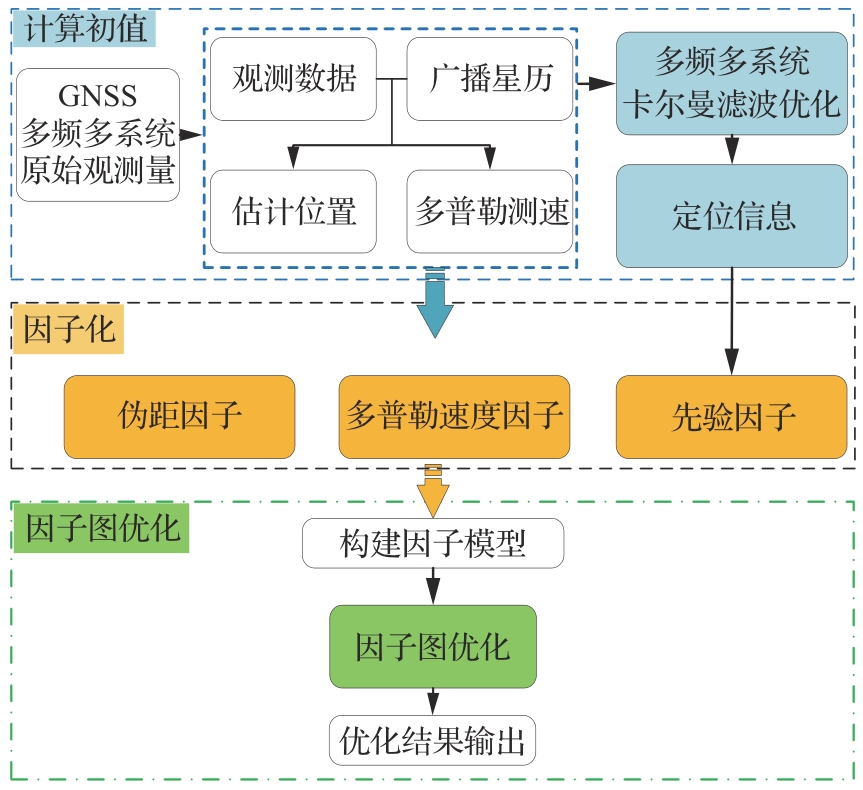

Fig.2
Factor structure of FGO-KF model
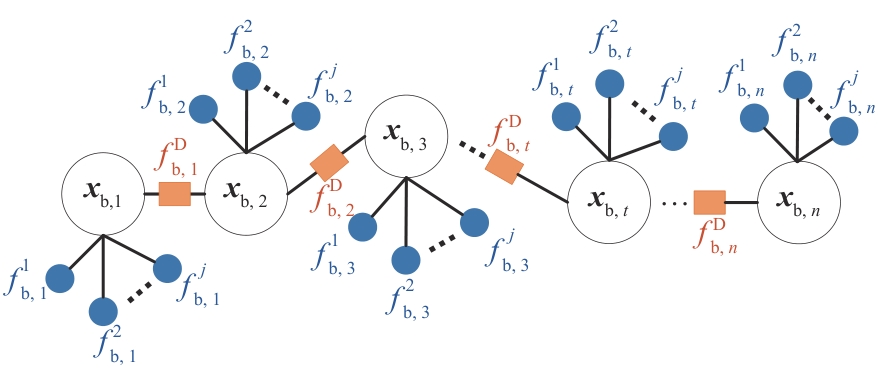
Fig.3
Carrier phase double difference diagram
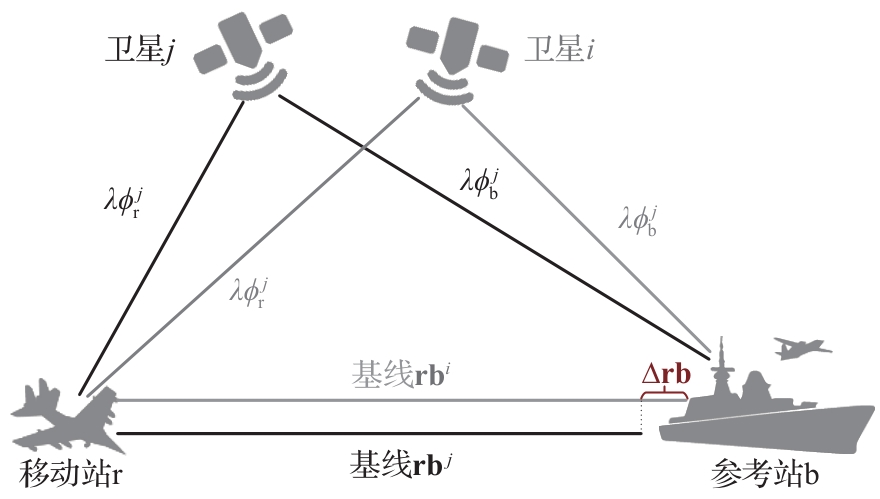
Fig.4
Flowchart of BDM-PAR strategy
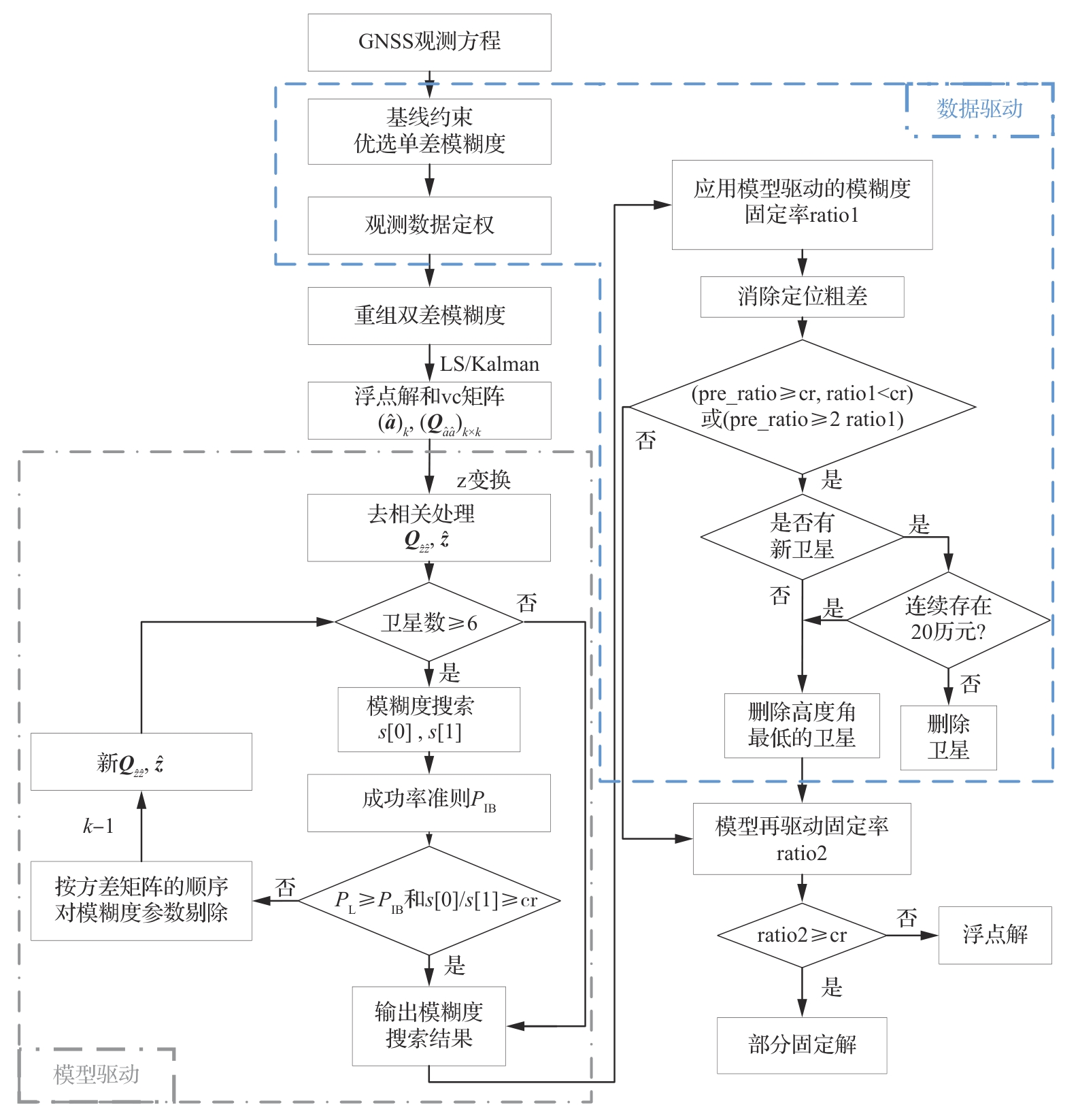

Fig.5
Factor structure of SFGO algorithm
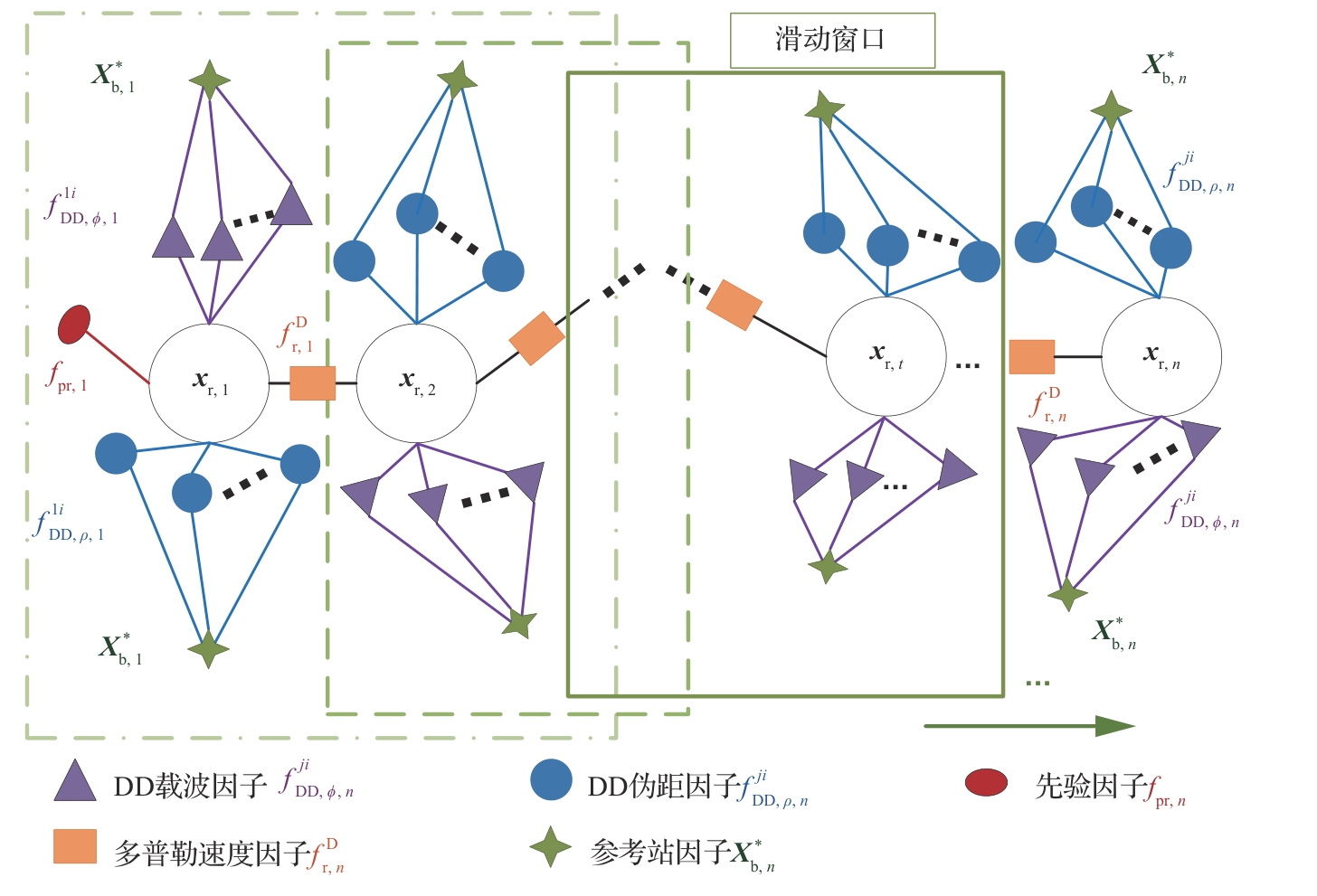
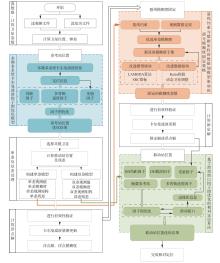
Fig.6
Flowchart of DF-AR algorithm
Table 1
Differences and similarities between different relative positioning algorithms
| 算法 | 参考站处理 | 模糊度固定策略 | 移动站优化 |
|---|---|---|---|
| WLK | WLS | LAMBDA | KF |
| KLK | KF | LAMBDA | KF |
| FLK | FGO-KF | LAMBDA | KF |
| WLPK | WLS | LDM-PAR | KF |
| WBPK | WLS | BDM-PAR | KF |
| FBPK | FGO-KF | BDM-PAR | KF |
| DF-AR | FGO-KF | BDM-PAR | SFGO |
Table 2
Solving strategy
| 项目 | 策略 |
|---|---|
| 观测数据 | BDS/GPS多频数据 |
| 星历 | 广播星历 |
| 截止高度角/(°) | 15 |
| 截止信噪比/dBHz | 20 |
| 速度约束 | GNSS多普勒测速 |
| 随机模型 | 高度角模型 |
Table 3
Relative positioning error of different reference station processing schemes
| 算法 | E向误差/m | N向误差/m | U向误差/m | RMSE/m | |||
|---|---|---|---|---|---|---|---|
| 最大 | 平均 | 最大 | 平均 | 最大 | 平均 | ||
| WLK | 1.636 1 | 1.446 9 | 0.828 0 | 0.598 9 | 0.889 2 | 0.573 3 | 1.677 0 |
| KLK | 1.620 9 | 1.417 8 | 0.815 8 | 0.567 0 | 0.874 2 | 0.548 6 | 1.632 5 |
| FLK | 1.610 3 | 1.285 8 | 0.812 3 | 0.471 5 | 0.859 5 | 0.474 1 | 1.465 9 |
Table 4
Relative positioning results of different ambiguity resolution strategies
| 算法 | E向误差 /m | N向误差 /m | U向误差 /m | RMSE /m | 固定率 /% |
|---|---|---|---|---|---|
| WLK | 1.447 2 | 0.600 3 | 0.573 6 | 1.677 9 | 94.82 |
| WLPK | 1.450 3 | 0.536 2 | 0.531 7 | 1.645 1 | 99.64 |
| WBPK | 1.375 6 | 0.510 2 | 0.524 6 | 1.573 4 | 99.02 |
Table 5
Relative positioning error and baseline error of different positioning algorithms
| 算法 | 相对定位误差/m | 基线误差/m | ||||
|---|---|---|---|---|---|---|
| E向 | N向 | U向 | RMSE | 最大 | 平均 | |
| WLK | 1.446 9 | 0.598 9 | 0.573 3 | 1.677 9 | 0.181 4 | 0.010 9 |
| FBPK | 1.185 7 | 0.374 7 | 0.409 6 | 1.339 3 | 0.013 1 | 0.003 6 |
| DF-AR | 0.338 4 | 0.327 3 | 0.398 4 | 0.808 9 | 0.166 2 | 0.003 3 |
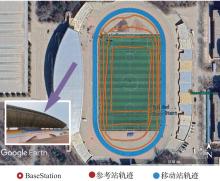
Fig.7
Dual vehicle relative positioning reference trajectory
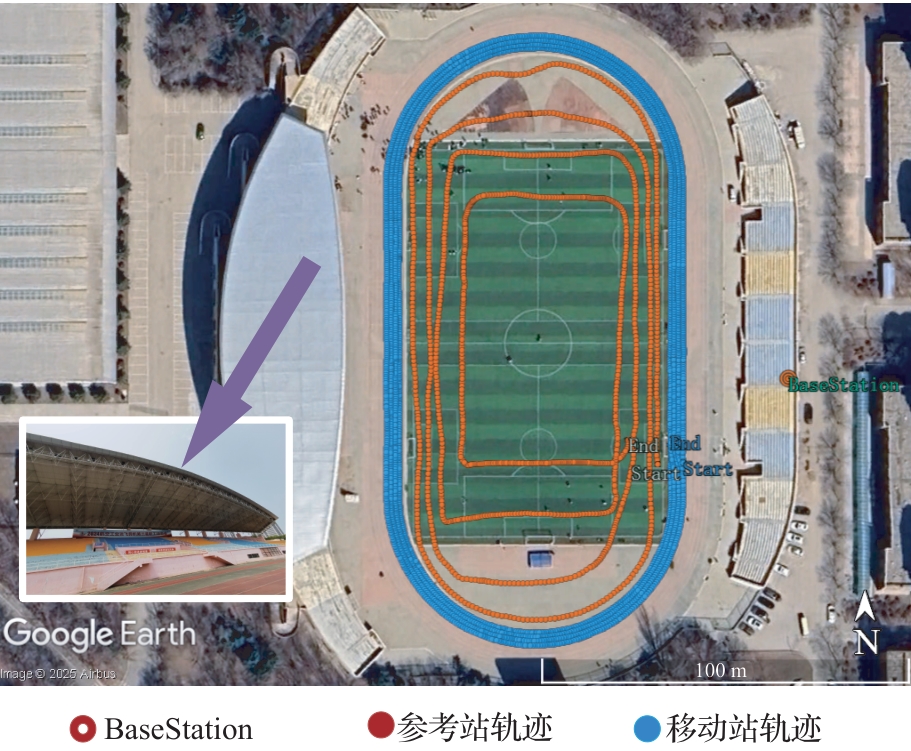

Fig.8
Three-dimensional view of dual vehicle positioning error with different algorithms
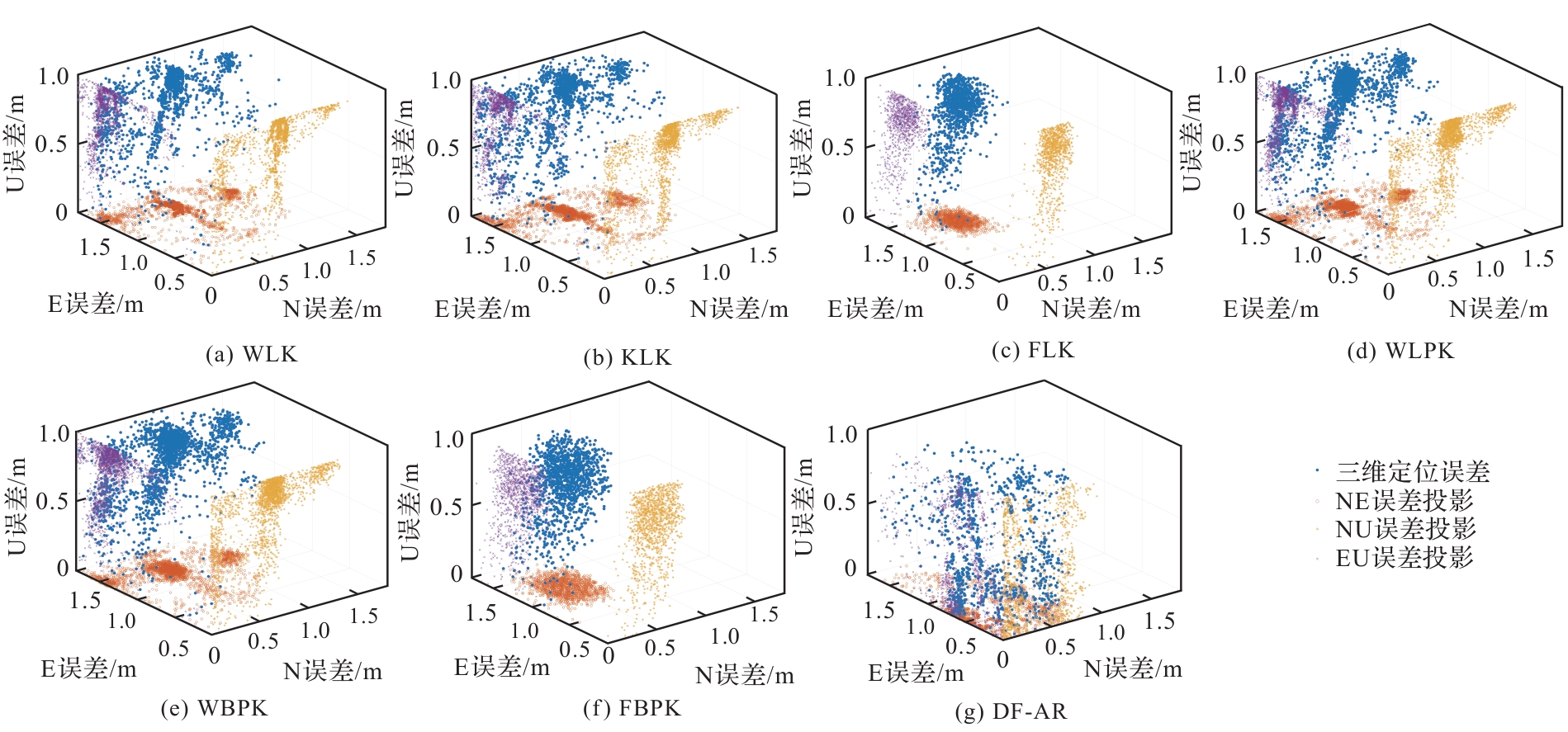
Table 6
Dual vehicle relative positioning results for different algorithms
| 计算结果 | 算法 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| WLK | KLK | FLK | WLPK | WBPK | FBPK | DF-AR | |||
| 定位误差/m | E向 | 最大 | 6.392 0 | 6.094 6 | 6.245 9 | 6.792 0 | 5.967 2 | 5.997 4 | 3.257 9 |
| 平均 | 1.429 6 | 1.427 6 | 1.304 9 | 1.442 3 | 1.373 6 | 1.186 1 | 0.590 0 | ||
| RMSE | 1.467 2 | 1.443 6 | 1.330 4 | 1.479 3 | 1.388 5 | 1.218 9 | 0.689 5 | ||
| N向 | 最大 | 1.406 4 | 1.320 5 | 1.266 3 | 1.336 4 | 1.211 8 | 1.179 2 | 1.127 2 | |
| 平均 | 0.701 0 | 0.673 8 | 0.560 8 | 0.630 9 | 0.608 1 | 0.468 0 | 0.325 0 | ||
| RMSE | 0.765 4 | 0.678 4 | 0.571 1 | 0.699 3 | 0.614 4 | 0.488 8 | 0.423 9 | ||
| U向 | 最大 | 8.556 4 | 11.433 5 | 8.405 4 | 11.474 3 | 11.515 1 | 8.999 2 | 4.890 0 | |
| 平均 | 0.916 3 | 0.914 5 | 0.881 1 | 0.890 4 | 0.885 6 | 0.776 4 | 0.644 9 | ||
| RMSE | 0.974 2 | 0.995 5 | 0.966 1 | 0.981 7 | 0.979 0 | 0.880 1 | 0.851 6 | ||
| 总RMSE | 1.920 3 | 1.880 2 | 1.740 6 | 1.908 2 | 1.850 0 | 1.580 9 | 1.174 9 | ||
| 总STD | 0.398 5 | 0.367 7 | 0.391 2 | 0.455 4 | 0.460 9 | 0.430 4 | 0.504 5 | ||
| 速度误差/(m·s-1) | 最大 | 8.779 0 | 11.435 7 | 8.894 8 | 11.466 6 | 11.506 7 | 8.952 0 | 4.390 8 | |
| 平均 | 0.045 3 | 0.062 2 | 0.131 2 | 0.074 8 | 0.089 3 | 0.191 9 | 0.243 6 | ||
| 加速度误差/(m·s-2) | 最大 | 19.887 5 | 23.465 8 | 19.535 6 | 23.505 2 | 23.602 0 | 19.972 5 | 5.375 5 | |
| 平均 | 0.151 0 | 0.178 6 | 0.367 4 | 0.200 2 | 0.237 1 | 0.541 3 | 0.876 2 | ||
| 固定率/% | 55.34 | 30.02 | 55.17 | 99.07 | 96.13 | 95.16 | 99.26 | ||

Fig.9
Motion trajectories of dual vehicle experimental mobile station with different algorithms
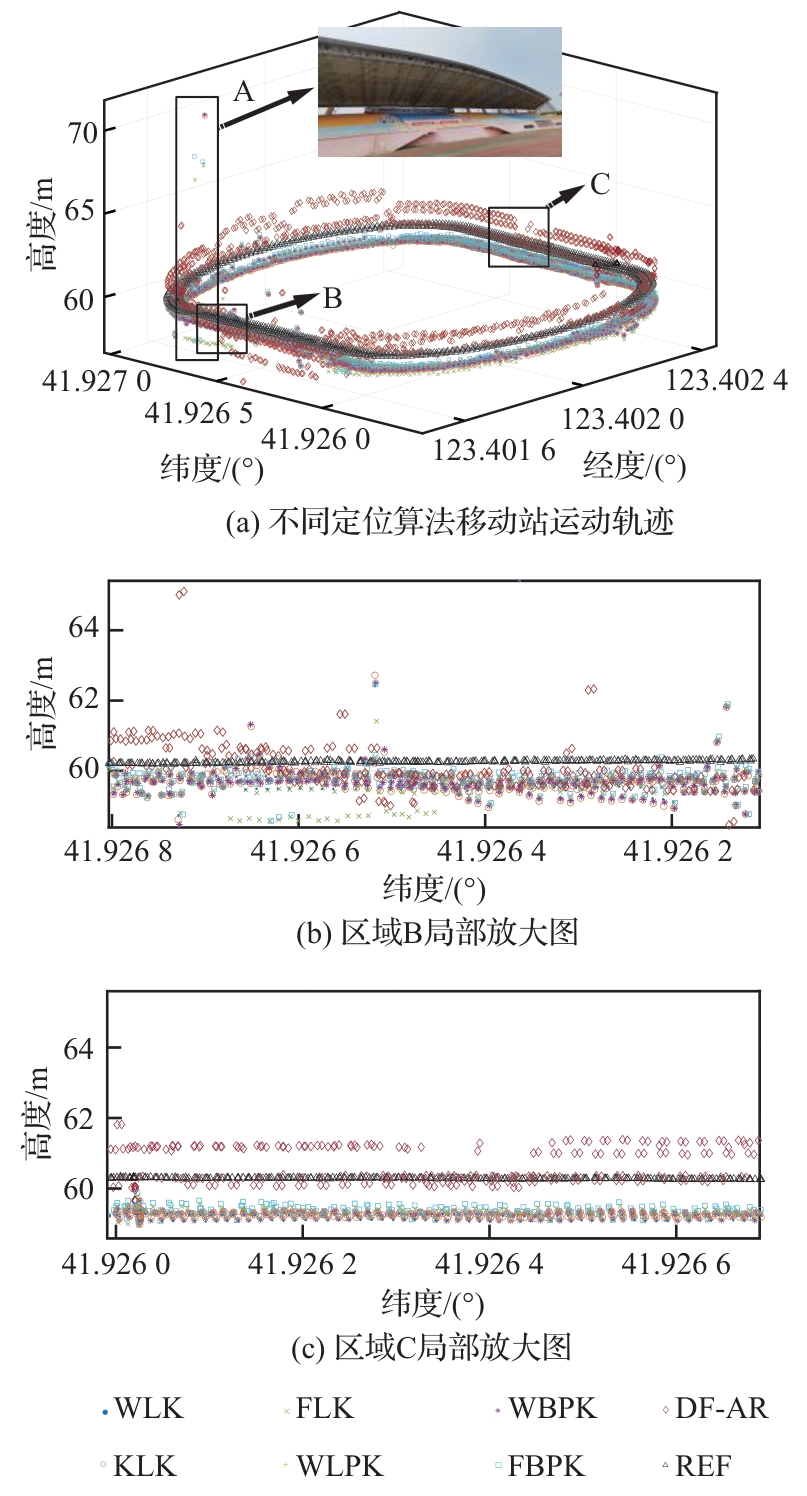
Fig.10
Cumulative distribution of dual vehicle positioning errors for different algorithms
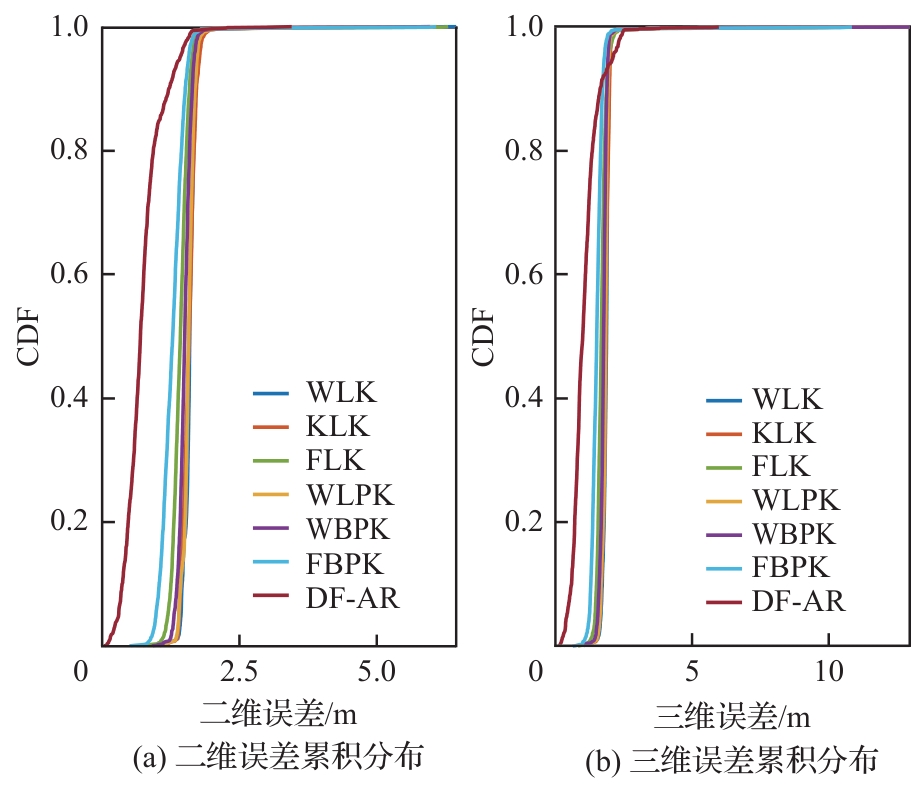
Fig.11
Dual vehicle positioning baseline error with different algorithms
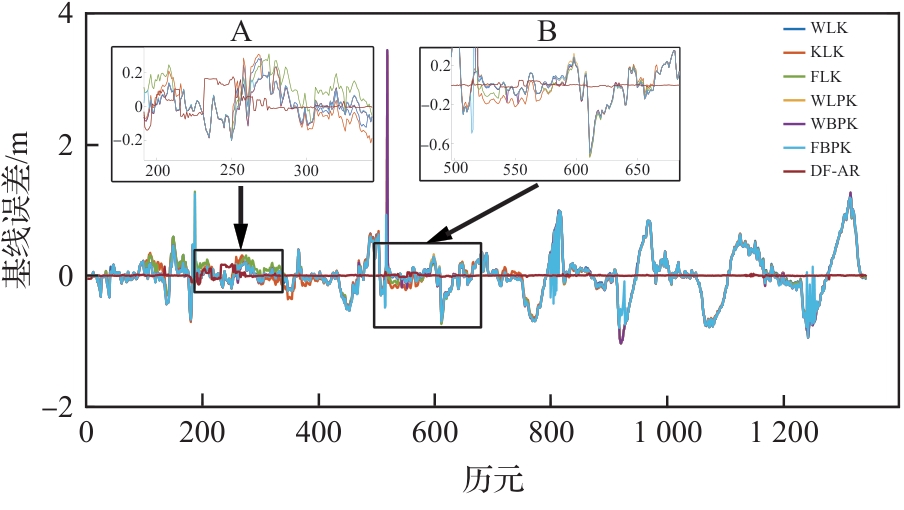
Table 7
Results of baseline solutions for dual vehicle positioning with different algorithms
| 算法 | 基线误差/m | 相对速度误差/(m·s-1) | ||||
|---|---|---|---|---|---|---|
| 最大 | 平均 | RMSE | STD | 最大 | 平均 | |
| WLK | 1.243 7 | 0.213 1 | 0.322 2 | 0.241 7 | 1.061 3 | 0.047 6 |
| KLK | 3.378 2 | 0.221 6 | 0.334 6 | 0.250 8 | 3.383 5 | 0.050 5 |
| FLK | 1.286 6 | 0.217 5 | 0.323 7 | 0.239 8 | 1.214 1 | 0.048 6 |
| WLPK | 3.431 7 | 0.211 0 | 0.333 1 | 0.257 9 | 3.305 6 | 0.049 5 |
| WBPK | 3.456 8 | 0.210 9 | 0.333 5 | 0.258 4 | 3.331 0 | 0.049 9 |
| FBPK | 1.253 9 | 0.202 4 | 0.307 6 | 0.231 8 | 1.390 9 | 0.060 9 |
| DF-AR | 0.197 8 | 0.010 9 | 0.027 7 | 0.025 5 | 0.205 7 | 0.005 7 |
Fig.12
UAV/vehicle relative positioning reference trajectory
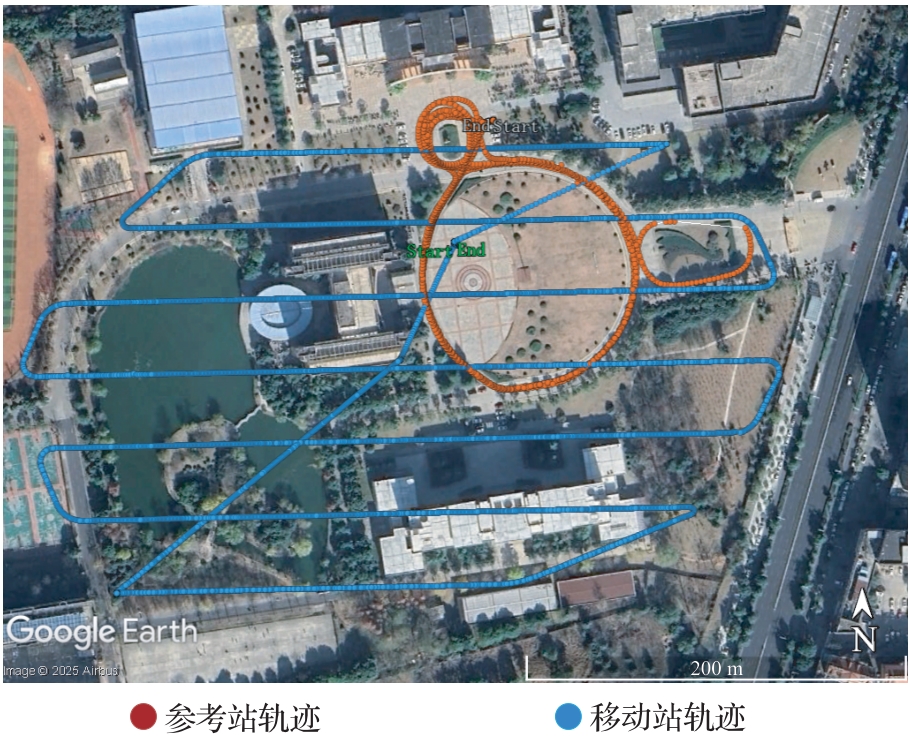
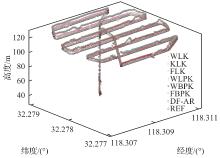
Fig.13
Experimental motion trajectories of UAV/vehicle with different algorithms

Table 8
Relative UAV/vehicle positioning results for different algorithms
| 计算结果 | 算法 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| WLK | KLK | FLK | WLPK | WBPK | FBPK | DF-AR | |||
| 定位误差/m | E向 | 最大 | 5.708 3 | 5.576 9 | 5.586 1 | 5.317 3 | 5.190 0 | 5.172 0 | 1.623 2 |
| 平均 | 1.969 4 | 1.894 8 | 1.810 2 | 1.654 0 | 1.492 0 | 1.648 9 | 0.794 2 | ||
| RMSE | 2.147 1 | 2.075 5 | 1.974 4 | 1.844 2 | 1.694 8 | 1.809 5 | 0.855 6 | ||
| N向 | 最大 | 6.212 4 | 6.125 3 | 5.027 9 | 6.018 1 | 5.986 5 | 4.671 7 | 2.121 2 | |
| 平均 | 2.468 5 | 2.373 0 | 2.346 3 | 2.286 6 | 2.254 8 | 2.219 5 | 0.303 2 | ||
| RMSE | 2.549 4 | 2.459 2 | 2.407 0 | 2.373 7 | 2.343 3 | 2.281 7 | 0.399 0 | ||
| U向 | 最大 | 11.316 9 | 11.338 8 | 9.578 7 | 11.468 7 | 11.635 1 | 9.636 3 | 4.826 7 | |
| 平均 | 4.086 1 | 4.032 3 | 4.261 9 | 3.935 3 | 3.826 0 | 4.200 4 | 2.241 5 | ||
| RMSE | 4.386 4 | 4.335 8 | 4.549 0 | 4.245 8 | 4.145 1 | 4.504 4 | 2.383 0 | ||
| 总RMSE | 5.509 1 | 5.399 5 | 5.512 3 | 5.202 1 | 5.054 2 | 5.363 8 | 2.563 2 | ||
| 总STD | 1.410 9 | 1.417 7 | 1.443 2 | 1.420 8 | 1.423 1 | 1.450 5 | 0.711 2 | ||
| 速度误差/(m·s-1) | 最大 | 3.527 0 | 3.444 0 | 3.479 2 | 3.418 8 | 3.402 9 | 3.515 6 | 1.918 3 | |
| 平均 | 0.123 2 | 0.141 4 | 0.176 7 | 0.235 8 | 0.322 8 | 0.226 7 | 0.075 0 | ||
| 加速度误差/(m·s-2) | 最大 | 7.735 9 | 7.571 8 | 7.599 6 | 7.504 0 | 7.399 8 | 7.600 1 | 3.837 9 | |
| 平均 | 0.416 1 | 0.466 1 | 0.565 7 | 0.653 1 | 0.844 2 | 0.693 6 | 0.195 9 | ||
| 固定率% | 55.34 | 54.25 | 14.09 | 97.92 | 93.64 | 94.56 | 94.34 | ||
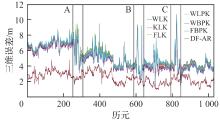
Fig.14
Three-dimensional error of mobile station with different relative positioning algorithms
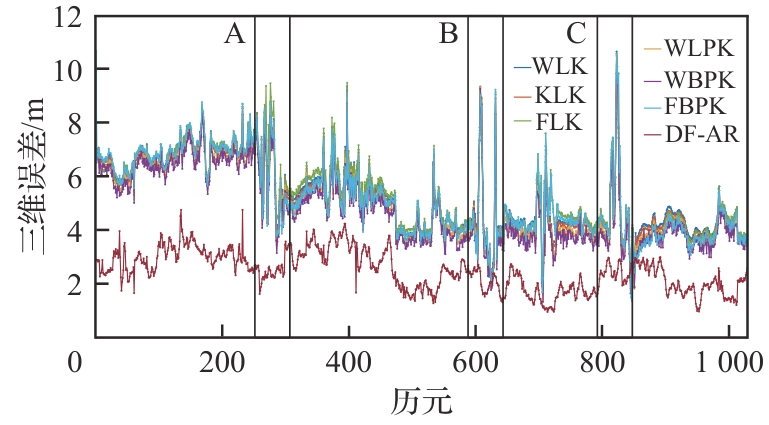
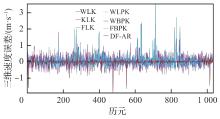
Fig.15
Three-dimensional velocity error of mobile station with different relative positioning algorithms
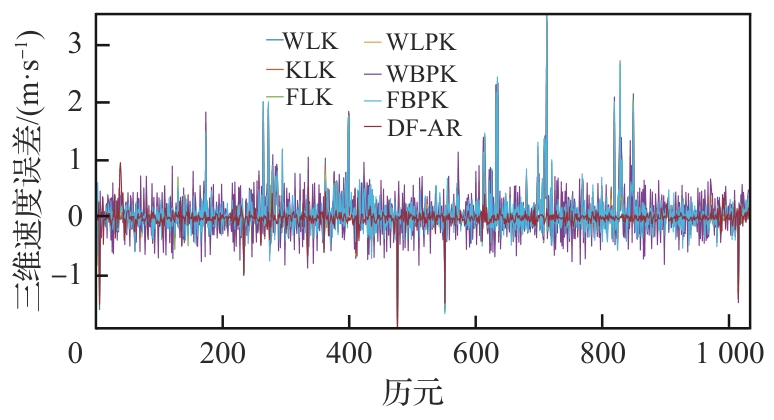
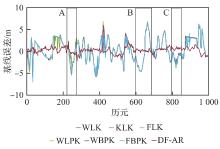
Fig.16
UAV/vehicle baseline errors for different positioning algorithms
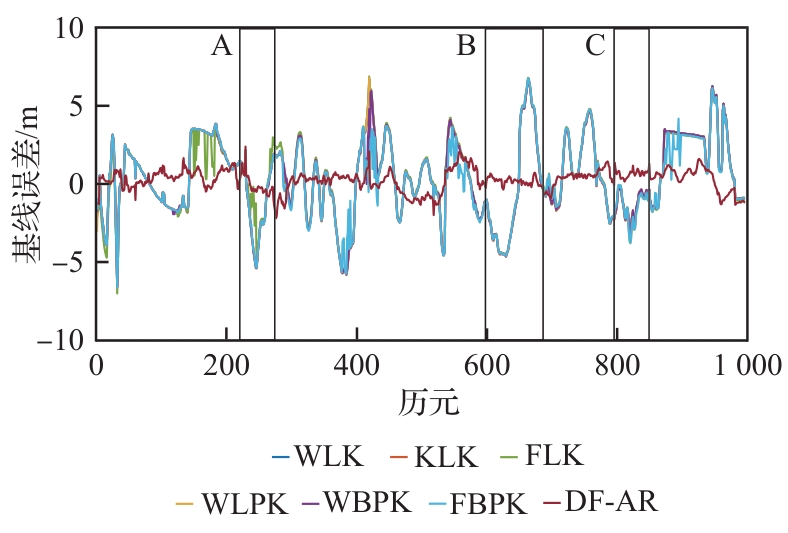
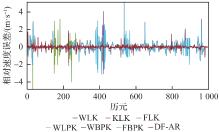
Fig.17
UAV/vehicle relative speed error for different positioning algorithms
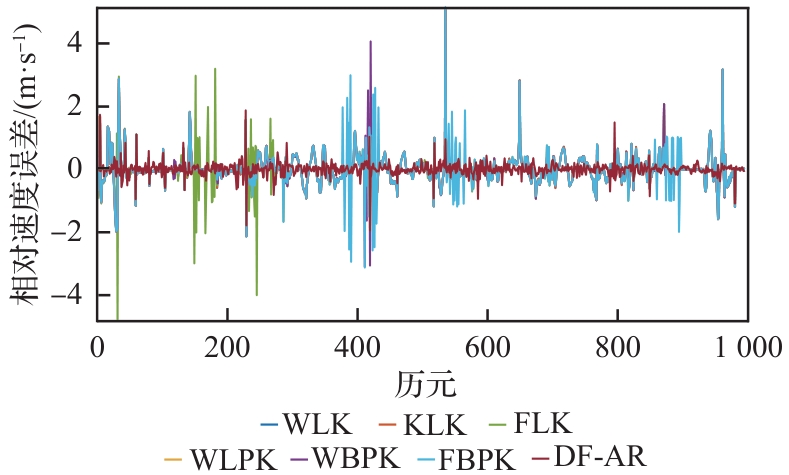
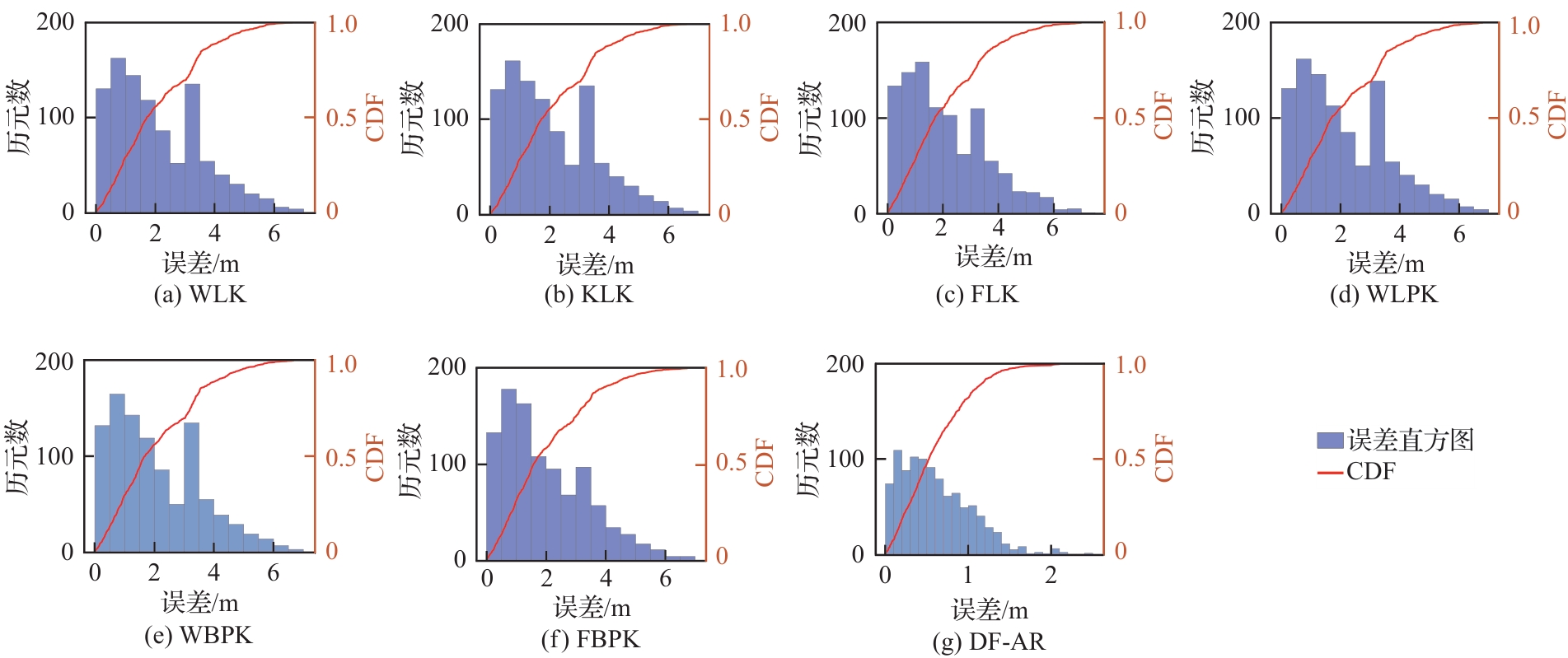
Table 9
UAV/vehicle baseline results for different positioning algorithms
| 算法 | 基线误差/m | 相对速度误差/(m·s-1) | ||||
|---|---|---|---|---|---|---|
| 最大 | 平均 | RMSE | STD | 最大 | 平均 | |
| WLK | 6.724 0 | 2.097 6 | 2.568 1 | 2.534 3 | 5.137 6 | 0.270 1 |
| KLK | 6.726 9 | 2.099 9 | 2.570 2 | 2.536 5 | 5.137 1 | 0.269 7 |
| FLK | 7.009 1 | 2.066 3 | 2.543 2 | 2.500 3 | 5.141 2 | 0.314 7 |
| WLPK | 6.809 2 | 2.100 5 | 2.574 6 | 2.535 8 | 5.131 3 | 0.269 6 |
| WBPK | 6.688 8 | 2.074 3 | 2.543 4 | 2.509 1 | 5.118 8 | 0.283 2 |
| FBPK | 6.756 4 | 1.768 4 | 2.328 9 | 2.408 9 | 5.167 9 | 0.335 5 |
| DF-AR | 2.402 5 | 0.670 7 | 0.830 3 | 0.887 1 | 1.949 7 | 0.129 1 |

Fig.18
UAV/vehicle baseline error distribution for different relative positioning algorithms
| [1] | 张晓帆, 刘鑫, 黄婉君. 美国航母联合精确进近着舰系统[J]. 舰船科学技术, 2024, 46(2): 185-189. |
| ZHANG X F, LIU X, HUANG W J. US aircraft carrier joint precision approach and landing system[J]. Ship Science and Technology, 2024, 46(2): 185-189 (in Chinese). | |
| [2] | ZHANG L F, WANG S P, MARIA SERGEEVNA S, et al. A new adaptive Kalman filter for navigation systems of carrier-based aircraft[J]. Chinese Journal of Aeronautics, 2022, 35(1): 416-425. |
| [3] | TEUNISSEN P J G. A new method for fast carrier phase ambiguity estimation[C]∥Proceedings of 1994 IEEE Position, Location and Navigation Symposium-PLANS’94. Piscataway: IEEE Press,1994. |
| [4] | 杨卫平. 新一代飞行器导航制导与控制技术发展趋势[J]. 航空学报, 2024, 45(5): 529720. |
| YANG W P. Development trend of navigation guidance and control technology for new generation aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529720 (in Chinese). | |
| [5] | 顾海燕, 熊健. 全自动精密进近引导与传输技术研究[J]. 电讯技术, 2024, 64(7): 1102-1106. |
| GU H Y, XIONG J. Research on fully automatic precision approach guidance and transmission technology[J]. Telecommunication Engineering, 2024, 64(7): 1102-1106 (in Chinese). | |
| [6] | KRASUSKI K, CIEĆKO A, BAKUŁA M, et al. New methodology of designation the precise aircraft position based on the RTK GPS solution[J]. Sensors, 2021, 22(1): 21. |
| [7] | KRASUSKI K, CIEĆKO A, GRUNWALD G, et al. Improving positioning accuracy of aircraft using SPP method in GLONASS system[J]. Archives of Transport, 2024, 69(1): 21-37. |
| [8] | JIANG C H, CHEN Y W, JIA J X, et al. Open-source optimization method for Android smartphone single point positioning[J]. GPS Solutions, 2022, 26(3): 90. |
| [9] | KANHERE A V, GUPTA S, SHETTY A, et al. Improving GNSS positioning using neural-network-based corrections[J]. NAVIGATION: Journal of the Institute of Navigation, 2022, 69(4): 548. |
| [10] | DELLAERT F, KAESS M. Factor graphs for robot perception[J]. Foundations and Trends in Robotics, 2015, 6(1-2): 1-139. |
| [11] | WEN W S, HSU L T. Towards robust GNSS positioning and real-time kinematic using factor graph optimization[C]∥2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2021. |
| [12] | YAN S D, Lyu S L, LIU G, et al. Real-time kinematic positioning algorithm in graphical state space[C]∥Proceedings of the 2023 International Technical Meeting of The Institute of Navigation. Long Beach: Institute of Navigation, 2023. |
| [13] | WEN W S, ZHANG G H, HSU L T. GNSS outlier mitigation via graduated non-convexity factor graph optimization[J]. IEEE Transactions on Vehicular Technology, 2022, 71(1): 297-310. |
| [14] | CHENG Q, CHEN W, SUN R, et al. Strategy for single-epoch RTK positioning using dual frequency in urban areas[J]. IEEE Internet of Things Journal, 2024, 11(3): 4523-4534. |
| [15] | TANG H B, WAN B H, MAO X C. Multi-system real-time kinematic positioning based on fast satellite selection and improved Kalman filter[J]. Journal of Shanghai Jiaotong University (Science), 2024: 1-11. |
| [16] | TEUNISSEN P J G, JOOSTEN P, TIBERIUS C C J M. Geometry-free ambiguity success rates in case of partial fixing[C]∥Proceedings of the 1999 National Technical Meeting of the Institute of Navigation. San Diego: Institute of Navigation, 1999. |
| [17] | ZHANG X, YANG J. MPARELAM: A robust approach for ambiguity resolution in complex RTK positioning scenarios[J]. IEEE Sensors Journal, 2023, 23(17): 19582-19589. |
| [18] | TEUNISSEN P.J.G., VERHAGEN S. The GNSS ambiguity ratio-test revisited: A better way of using it[J]. Survey Review, 2009, 41(312): 138-151. |
| [19] | TAO X L, LIU W K, WANG Y Z, et al. Smartphone RTK positioning with multi-frequency and multi-constellation raw observations: GPS L1/L5, Galileo E1/E5a, BDS B1I/B1C/B2a[J]. Journal of Geodesy, 2023, 97(5): 43. |
| [20] | HOU Y Q, VERHAGEN S, WU J. A data driven partial ambiguity resolution: Two step success rate criterion, and its simulation demonstration[J]. Advances in Space Research, 2016, 58(11): 2435-2452. |
| [21] | LU L G, MA L Y, LIU W K, et al. A triple checked partial ambiguity resolution for GPS/BDS RTK positioning[J]. Sensors, 2019, 19(22): 5034. |
| [22] | CHEN C, ZHU J L, BO Y M, et al. Pedestrian smartphone navigation based on weighted graph factor optimization utilizing GPS/BDS multi-constellation[J]. Remote Sensing, 2023, 15(10): 2506. |
| [23] | 徐正鹏, 张全, 牛小骥. GNSS单点解算用于组合导航性能分析[J]. 测绘地理信息, 2019, 44(1): 32-35. |
| XU Z P, ZHANG Q, NIU X J. Analysis of integrated navigation base on GNSS single point position[J]. Journal of Geomatics, 2019, 44(1): 32-35 (in Chinese). | |
| [24] | BRACK A. Reliable GPS+BDS RTK positioning with partial ambiguity resolution[J]. GPS Solutions, 2017, 21(3): 1083-1092. |
| [25] | ZHOU Z L, LIU B Y, YANG H Z. A Hopular based weighting scheme for improving kinematic GNSS positioning in deep urban canyon[J]. Measurement Science and Technology, 2024, 35(7): 076304. |
| [26] | KHODABANDEH A, TEUNISSEN P J G. Bias-constrained integer least squares estimation: Distributional properties and applications in GNSS ambiguity resolution[J]. Journal of Geodesy, 2024, 98(5): 40. |
| [27] | MIAO W K, LI B F, GAO Y, et al. Vectorial integer bootstrapping of best integer equivariant estimation (VIB-BIE) for efficient and reliable GNSS ambiguity resolution[J]. Journal of Geodesy, 2024, 98(4): 30. |
| [28] | VERHAGEN S. On the approximation of the integer least-sqaures success rate: Which lower or upper bound to use?[J]. Journal of Global Positioning Systems, 2003, 2(2): 117-124. |
| [29] | JI S Y, WANG J, WENG D J, et al. Detailed investigation on ambiguity validation of long-distance RTK[J]. Remote Sensing, 2024, 16(16): 2982. |
| [30] | WANG Z P, HOU X P, DAN Z Q, et al. Adaptive Kalman filter based on integer ambiguity validation in moving base RTK[J]. GPS Solutions, 2022, 27(1): 34. |
| [31] | 张小红, 张元泰, 朱锋. 城市复杂场景下GNSS定位的因子图优化方法及其抗差性能分析[J]. 武汉大学学报(信息科学版), 2023, 48(7): 1050-1057. |
| ZHANG X H, ZHANG Y T, ZHU F. Factor graph optimization for urban environment GNSS positioning and robust performance analysis[J]. Geomatics and Information Science of Wuhan University, 2023, 48(7): 1050-1057 (in Chinese). |
| [1] | Chuang SHI, Zhixin WANG, Hao ZHANG, Tuan LI, Zhipeng WANG. Factor graph optimization based multi-GNSS positioning with robust variance component estimation [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531623-531623. |
| [2] | Jianhua CHENG, Sixiang CHENG, Bing QI, Shilong FAN, Guojing ZHAO, Sicheng CHEN. PPP/INS integrated navigation performance analysis in ionospheric scintillation environment [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730676-730676. |
| [3] | Weiqing LAI, Jiuqing WAN. Distributed relative positioning of aircraft group based on path⁃sum algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328735-328735. |
| [4] | Kun LI, Shuhui BU, Xuan JIA, Yifei DONG, Lin CHEN. Relative aircraft positioning based on inertial navigation and datalink [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 329594-329594. |
| [5] | LIANG Shuai, YANG Lin, YANG Zhaoxu, XU Bin. Kalman filter based T-S fuzzy control for morphing aircraft [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724274-724274. |
| [6] | ZHANG Hao, XIAO Yong, YANG Chaoxu, ZHANG Rui, XU Bin. Integrated navigation system based on fault detection using double state Chi-square test [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724271-724271. |
| [7] | FAN Yao, SHAO Xingyue, LI Qingdong, REN Zhang. Integrated 4D trajectory and attitude adaptive controller for civil aircraft [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2019, 40(2): 522437-522437. |
| [8] | REN Lei, DU Jianbang, WANG Meie. Error Analysis and Compensation of Size Effect in INS with IMU Rotation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2013, 34(6): 1424-1435. |
| [9] | YUE Yazhou, LI Sihai, ZHANG Yachong, LIU Zhenbo, WANG Jue. Differential Inertial Filter Design and Performance Analysis for Estimation of Misalignment Angle Between Airborne Master INS and Slave INS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2013, 34(10): 2402-2410. |
| [10] | WANG Yuegang, YANG Jiasheng, YANG Bo. SINS Initial Alignment of Swaying Base Under Geographic Latitude Uncertainty [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2012, 33(12): 2322-2329. |
| [11] | Wang Xiaogang;Guo Jifeng;Cui Naigang. Robust Sigma-point Filtering and Its Application to Relative Navigation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2010, 31(5): 1024-1029. |
| [12] | Yang Yong;Wang Kedong;Wu Zhen;Wang Haiyong;Zhang Hong. Evaluation of Performance of ICCP Algorithm with Different Parameters [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2010, 31(5): 996-1003. |
| [13] | Yao Jing;Yi Dongyun;Zhu Jubo;Nie Pengcheng. Navigation Satellite Selection Based on Spaceborne Distributed InSAR Terrain Height Determination Precision [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2009, 30(2): 290-297. |
| [14] | Qian Weixing;Liu Jianye;Li Rongbing;Zheng Zhiming. In-flight Rapid Alignment Method of INS/GNSS Integrated Navigation System [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2009, 30(12): 2395-2400. |
| [15] | Gao Qingwei;Zhao Guorong;Wang Xibin;Wu Fang. Incorporate Modeling and Simulation of Transfer Alignment withFlexure of Carrier and Leverarm Effect [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2009, 30(11): 2172-2177. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341