Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (S1): 730806.doi: 10.7527/S1000-6893.2024.30806
• Articles • Previous Articles Next Articles
Guochen NIU1,2( ), Xiangyu LUAN1
), Xiangyu LUAN1
Received:2024-06-07
Revised:2024-07-11
Accepted:2024-08-20
Online:2024-12-25
Published:2024-09-02
Contact:
Guochen NIU
E-mail:niu_guochen@139.com
Supported by:CLC Number:
Guochen NIU, Xiangyu LUAN. A method for apron mapping based on feature point extraction and multi-sensor fusion[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730806.
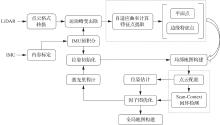
Fig.1
Algorithm overall framework
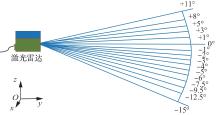
Fig. 2
Scanning line distribution of R-Fans-16M
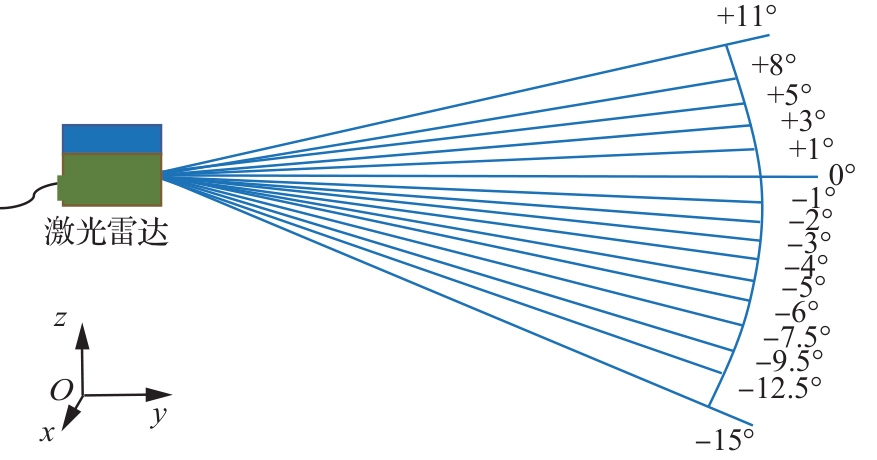
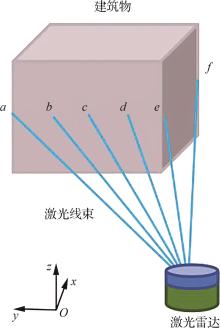
Fig.3
Point cloud mapping distribution on building
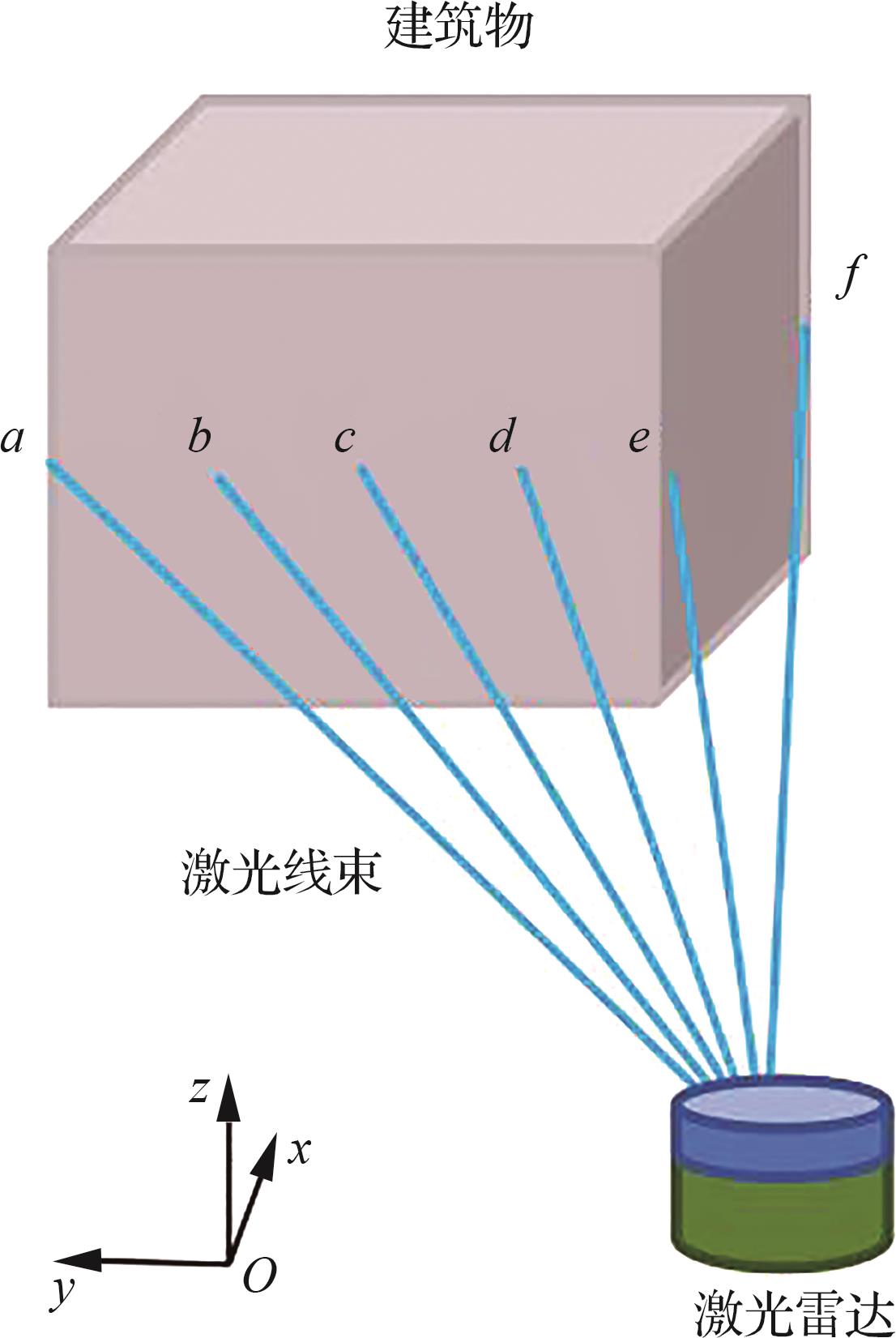
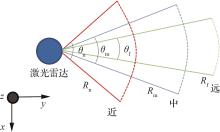
Fig.4
Adaptive point cloud scanning distribution
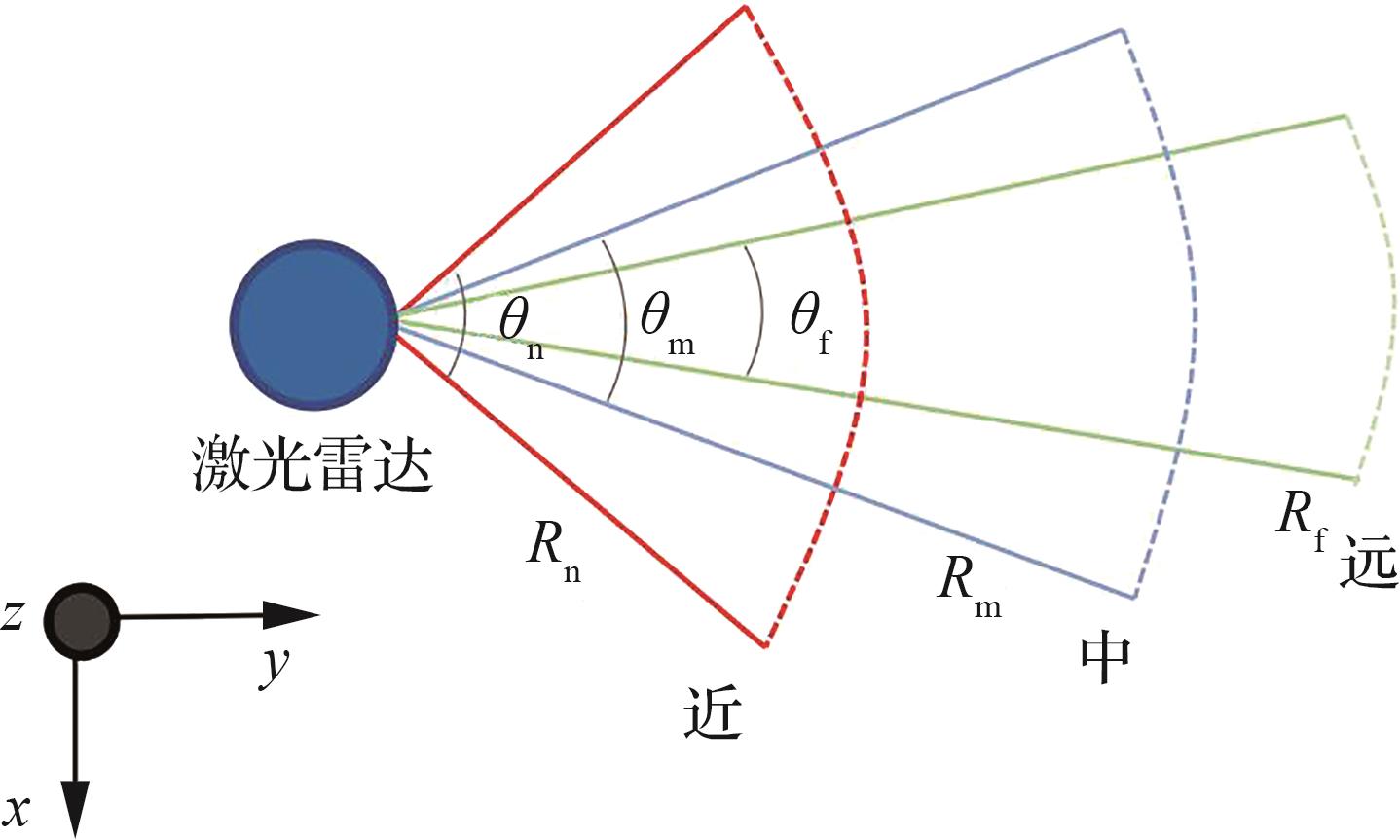

Fig.5
Real-world scene


Fig.6
Traditional feature point extraction
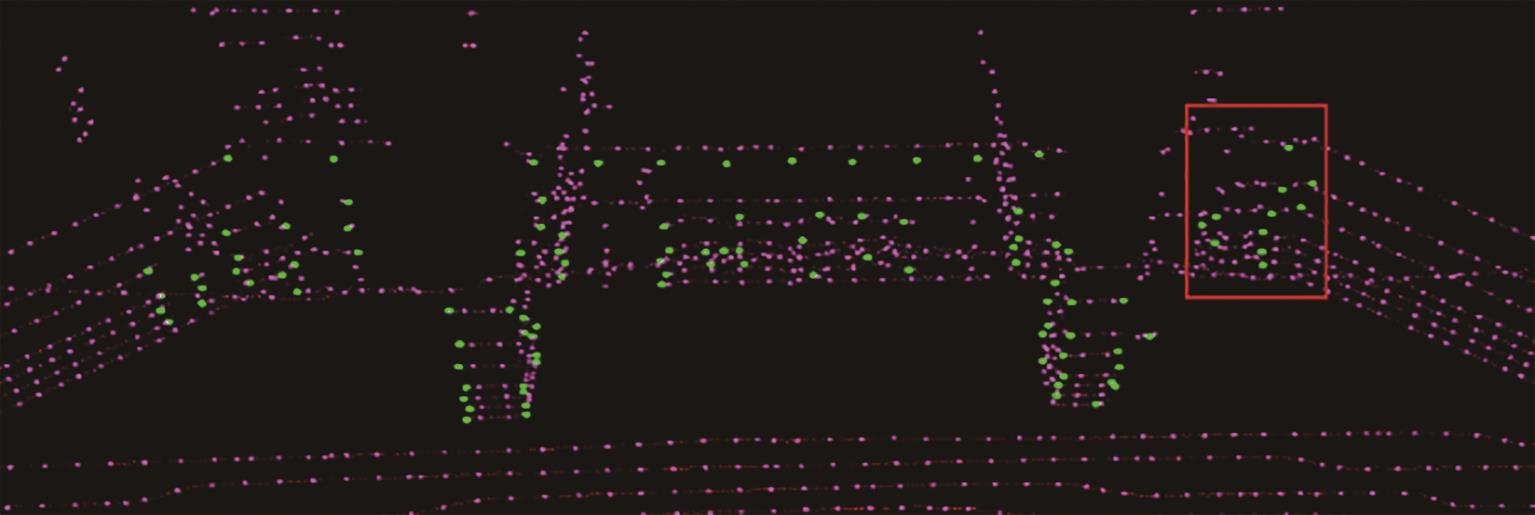

Fig.7
Adaptive feature point extraction
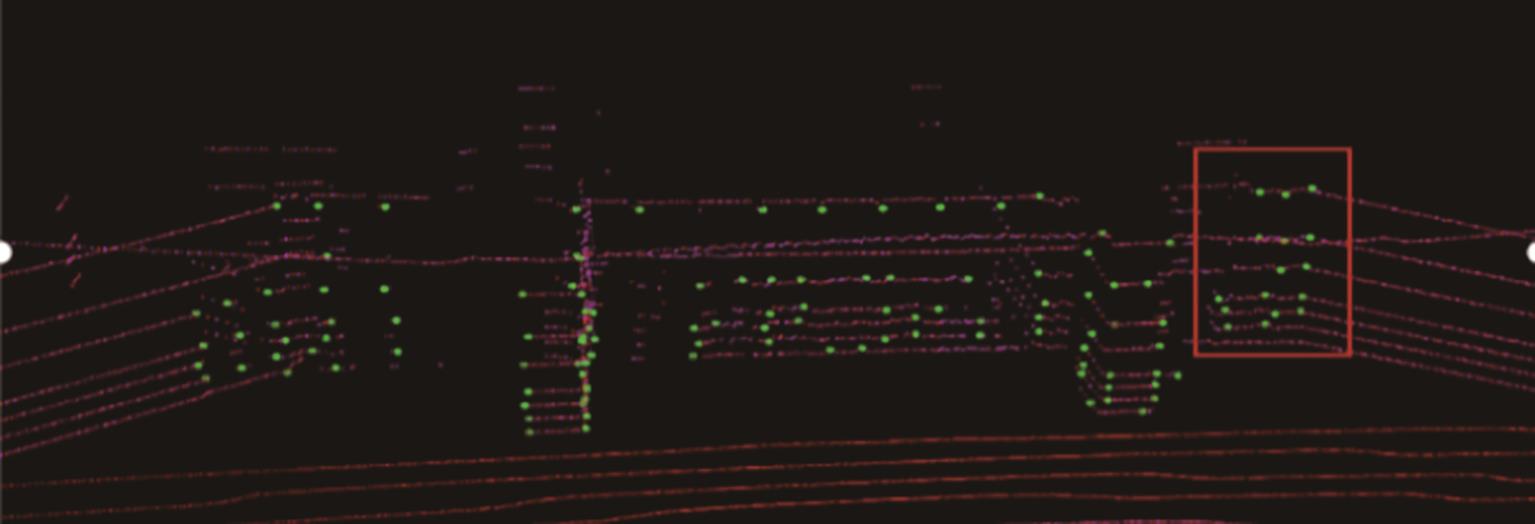

Fig.8
IMU preintegration factors
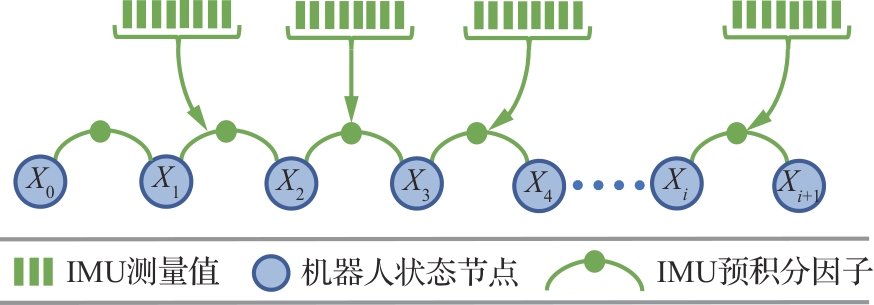

Fig.9
Laser odometry factors
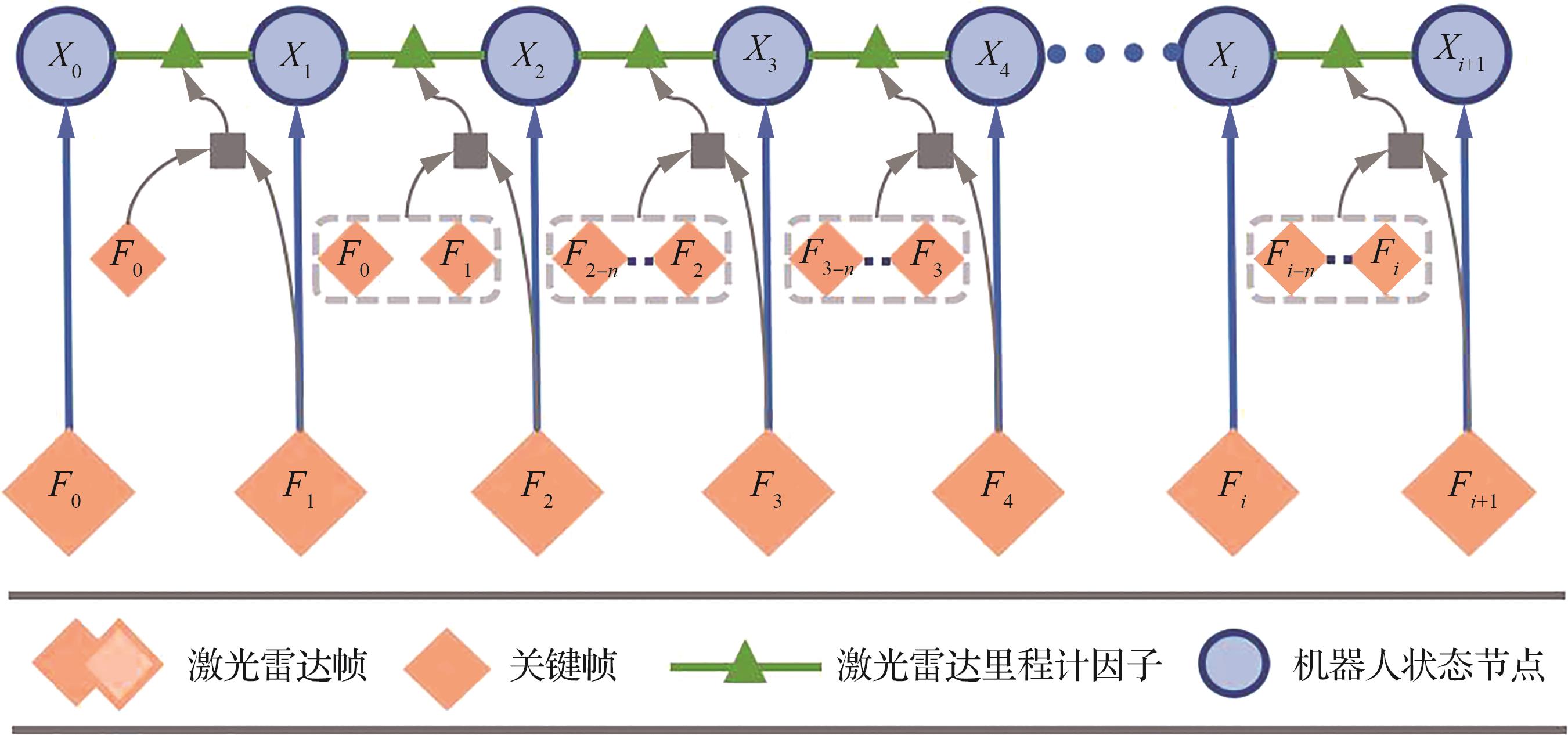

Fig.10
Loop closure detection factors
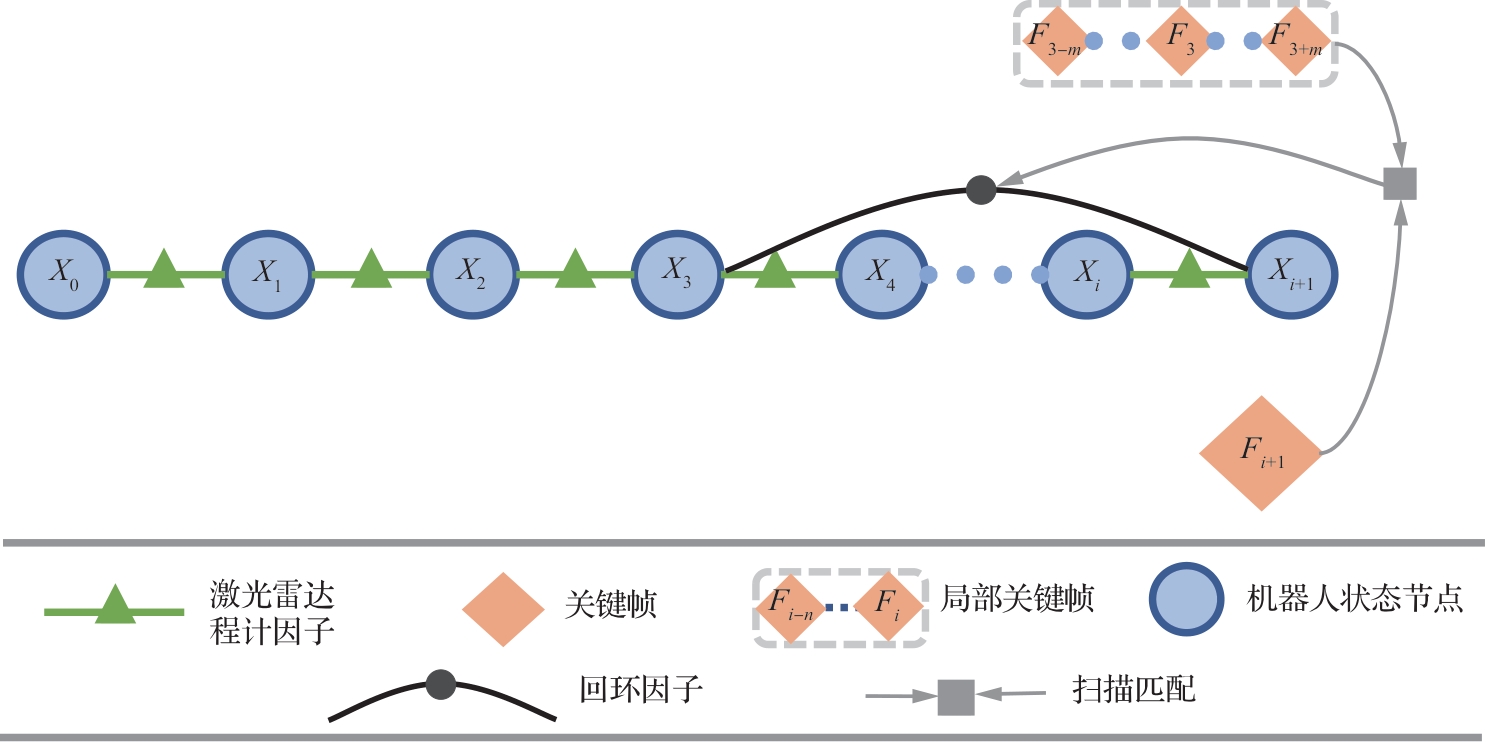

Fig.11
Scan-Context descriptor matrix
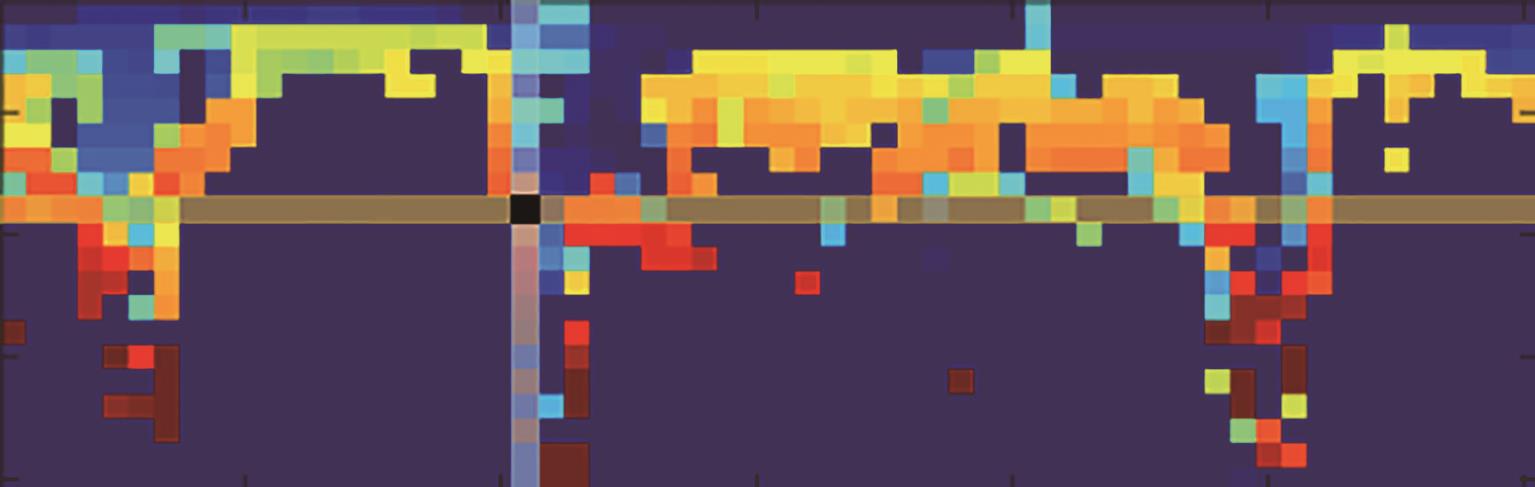

Fig.12
Experimental platform
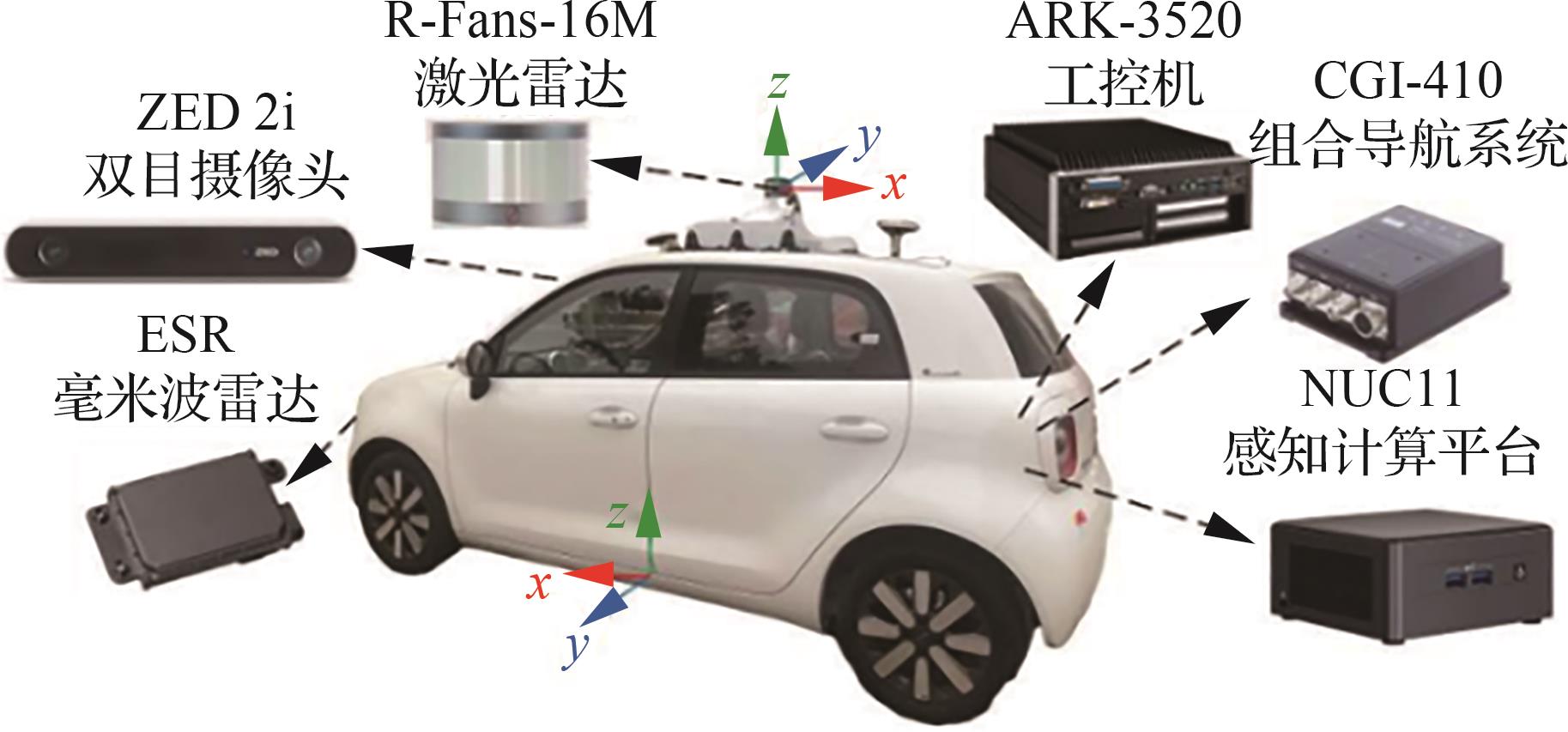

Fig.13
Google satellite map in experiment scenario

Fig.14
Comparison of trajectories in campus road scenarios
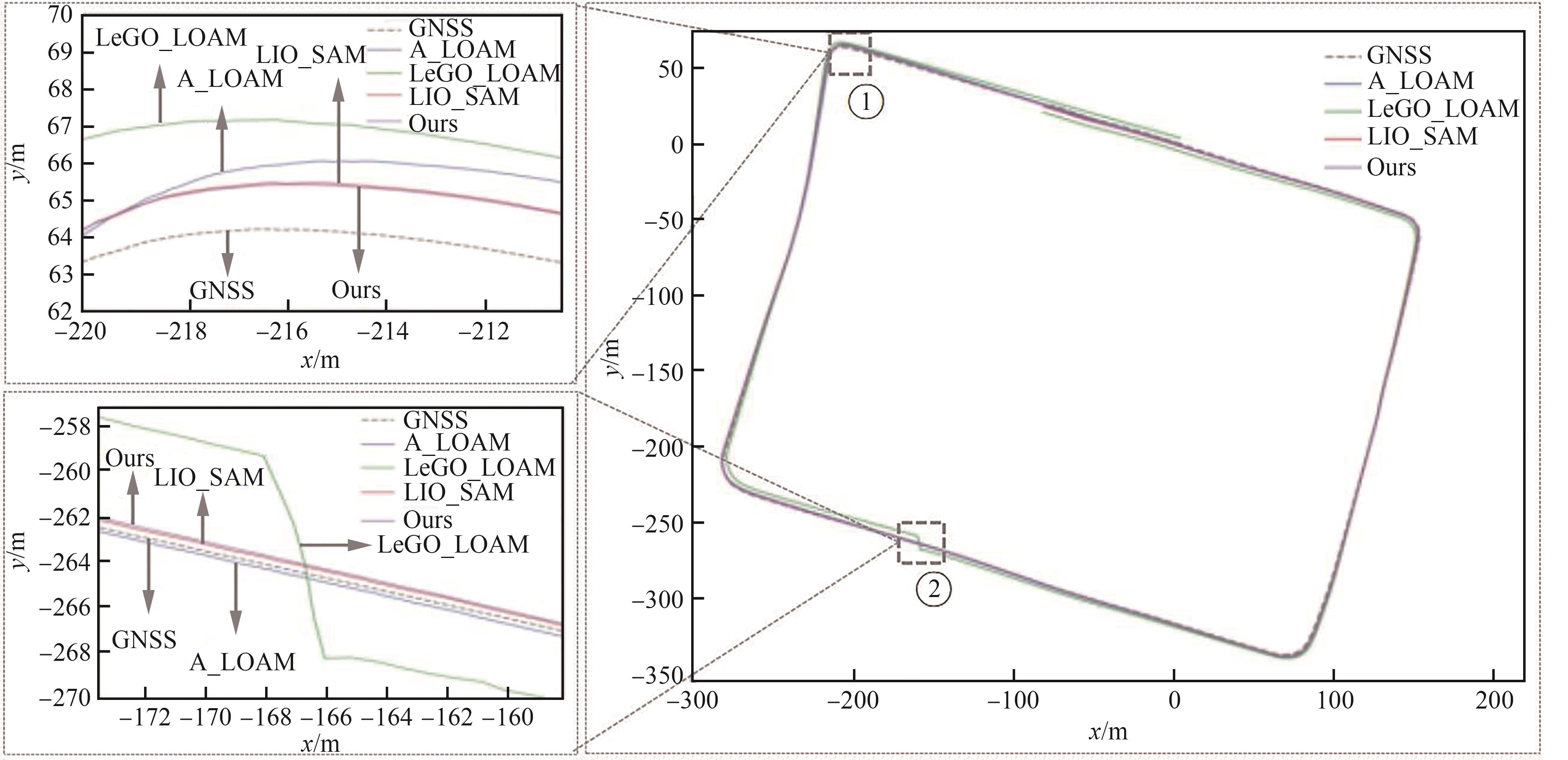

Fig.15
Actual scene at Point 2

Table 1
Comparison of absolute pose errors in campus road scenarios
| 采用算法 | 最大值/m | 最小值/m | 误差均值/m |
|---|---|---|---|
| A-LOAM | 3.688 | 0.331 | 1.302 |
| LeGO-LOAM | 5.503 | 0.906 | 2.815 |
| LIO-SAM | 2.912 | 0.309 | 0.905 |
| Ours | 1.885 | 0.107 | 0.814 |
Table 2
Comparison of relative pose errors in campus road scenarios
| 采用算法 | 最大值/m | 最小值/m | 误差均值/m |
|---|---|---|---|
| A-LOAM | 0.713 | 0.000 3 | 0.197 |
| LeGO-LOAM | 2.079 | 0.000 7 | 0.983 |
| LIO-SAM | 1.032 | 0.000 4 | 0.514 |
| Ours | 1.011 | 0.000 4 | 0.486 |

Fig. 16
Simulated airport apron google satellite map


Fig.17
Simulated airport apron dataset collection scenario

Fig.18
Comparison of simulated apron trajectories
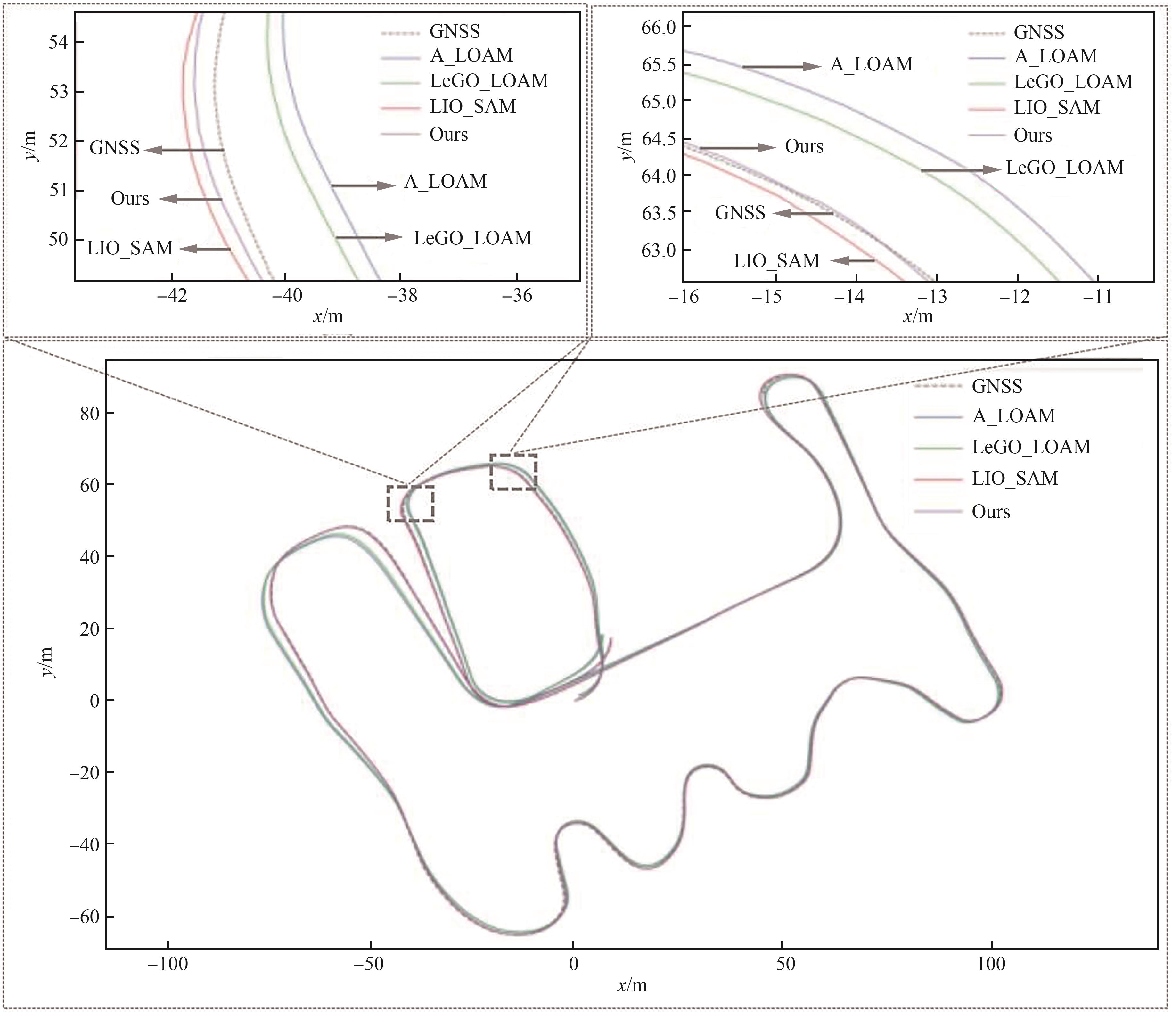
Table 3
Comparison of absolute pose errors in simulated apron scenarios
| 采用算法 | 最大值/m | 最小值/m | 误差均值/m |
|---|---|---|---|
| A-LOAM | 3.159 | 0.063 | 0.963 |
| LeGO-LOAM | 2.584 | 0.031 | 0.894 |
| LIO-SAM | 1.365 | 0.219 | 0.623 |
| Ours | 1.148 | 0.118 | 0.537 |
Table 4
Comparison of relative pose errors in simulated apron scenarios
| 采用算法 | 最大值/m | 最小值/m | 误差均值/m |
|---|---|---|---|
| A-LOAM | 1.223 | 0.001 2 | 0.328 |
| LeGO-LOAM | 1.982 | 0.001 0 | 0.435 |
| LIO-SAM | 1.305 | 0.000 6 | 0.358 |
| Ours | 1.254 | 0.000 7 | 0.319 |
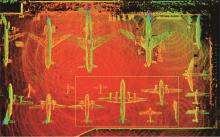
Fig.19
Global point cloud map of simulated apron
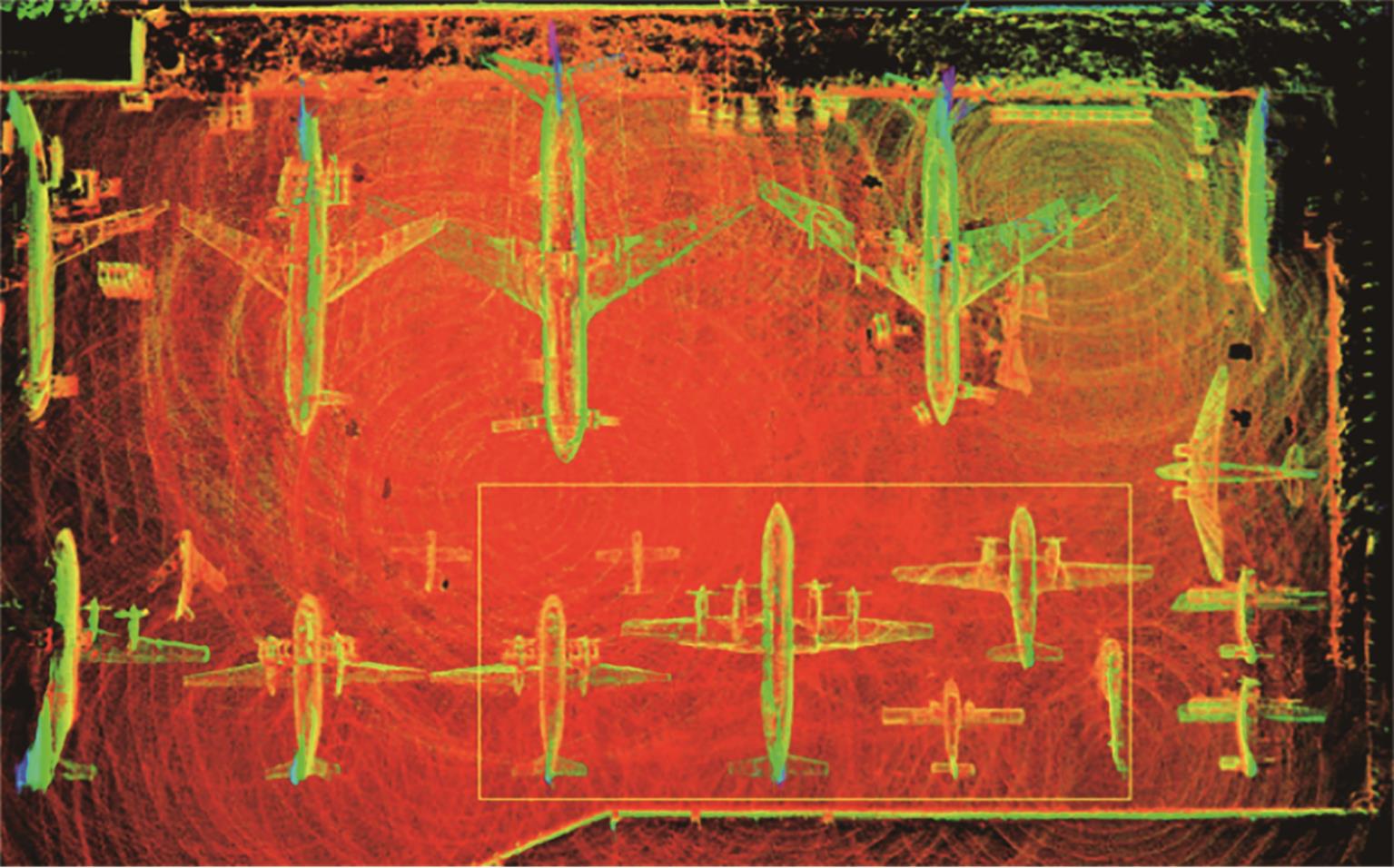
Fig.20
Local point cloud map of simulated apron
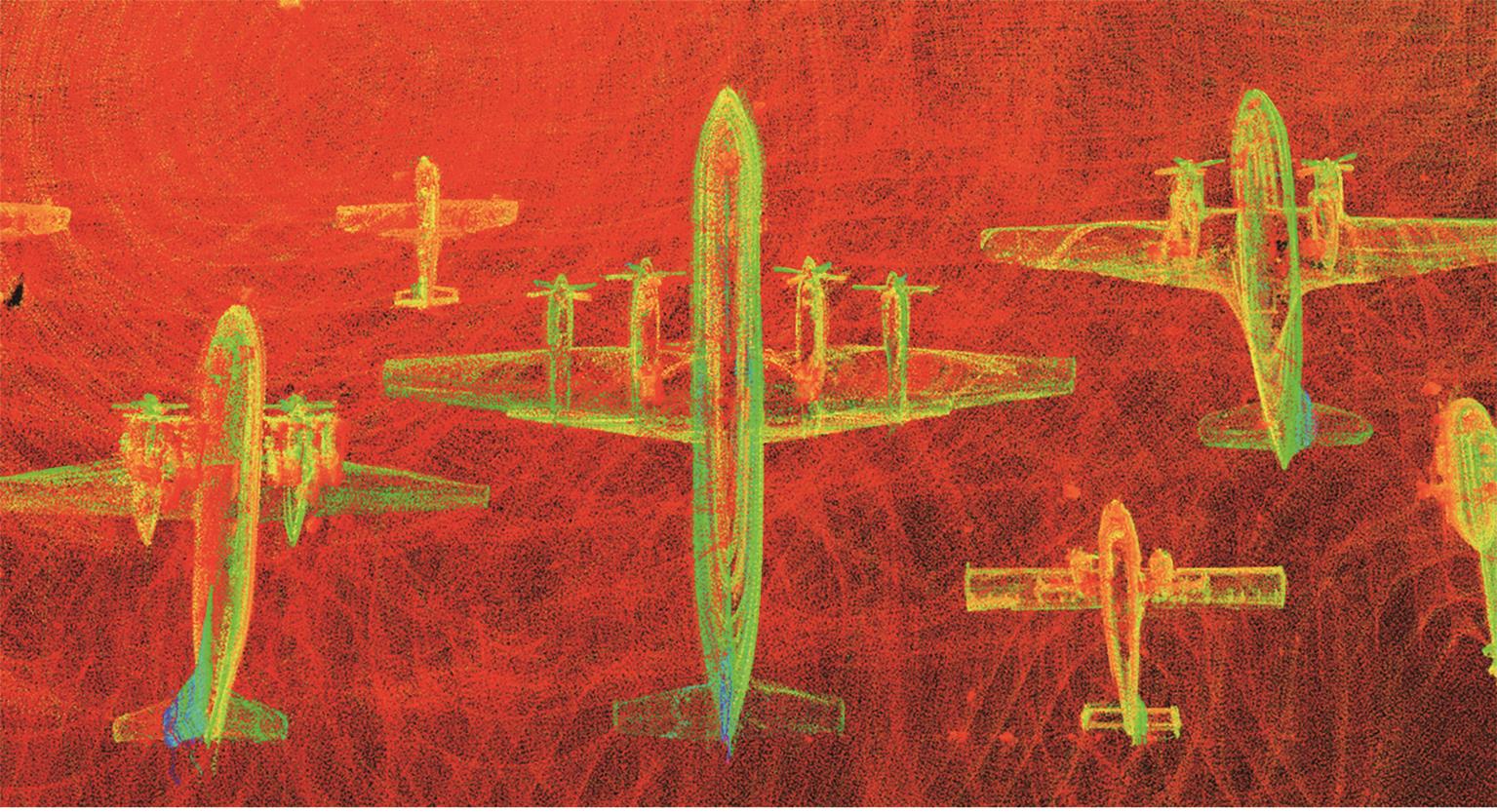
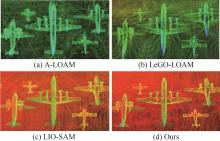
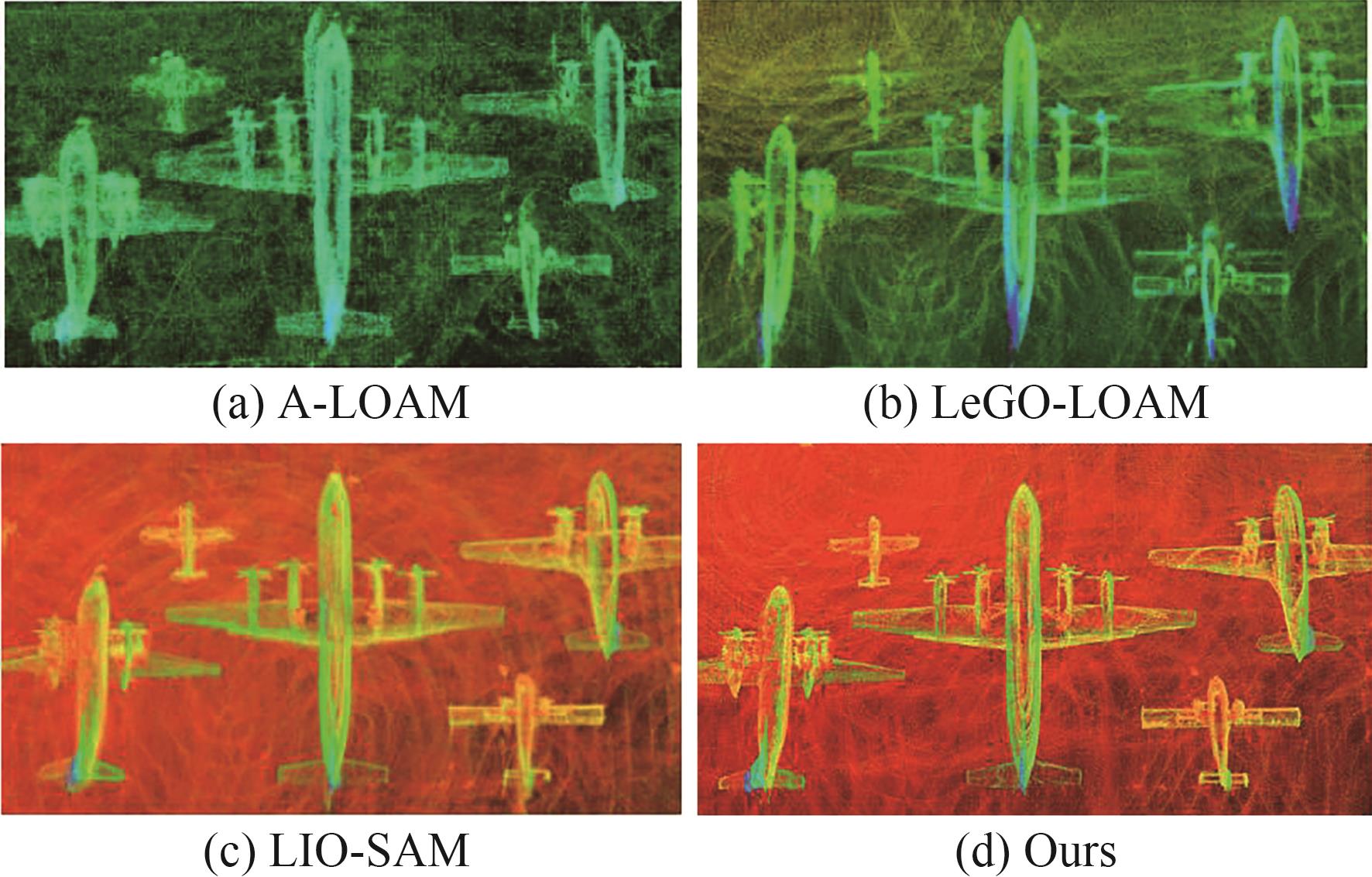
Fig.21
Comparison of local point cloud maps of simulated apron
| 1 | CHAI J H, DONG M L, SUN P, et al. 工业相机自热引起像点漂移模型与补偿方法[J]. Infrared and Laser Engineering, 2021, 50(6): 20200494. |
| 2 | 王冠岭,李辉,赵生捷,等. 基于“四型机场”建设目标的智慧飞行区建设研究文献综述[J]. 人工智能, 2022, (4): 8-16. |
| WANG G L, LI H, ZHAO S J, et al. Literature review on the construction of intelligent flight zones based on the “Four-Type Airport” construction goals[J]. Artificial Intelligence, 2022, (4): 8-16 (in Chinese). | |
| 3 | 仉新, 张禹, 苏晓明. 基于启发式算法的移动机器人SLAM[J]. 中国惯性技术学报, 2018, 26(1): 45-50. |
| ZHANG X, ZHANG Y, SU X M. Simultaneous localization and mapping of mobile robot based on heuristic algorithm[J]. Journal of Chinese Inertial Technology, 2018, 26(1): 45-50 (in Chinese). | |
| 4 | ALSADIK B, KARAM S. The simultaneous localization and mapping (SLAM)-An overview[J]. Journal of Applied Science and Technology Trends, 2021, 2(4): 120-131. |
| 5 | TAKETOMI T, UCHIYAMA H, IKEDA S. Visual SLAM algorithms: A survey from 2010 to 2016[J]. IPSJ Transactions on Computer Vision and Applications, 2017, 9(1): 16. |
| 6 | 周治国, 曹江微, 邸顺帆. 3D激光雷达SLAM算法综述[J]. 仪器仪表学报, 2021, 41(9): 13-27. |
| ZHOU Z G, CAO J W, DI S F. Overview of 3D lidar SLAM algorithms[J]. Chinese Journal of Scientific Instrument, 2021, 41(9): 13-27 (in Chinese). | |
| 7 | WANG H, WANG C, CHEN C L, et al. F-LOAM: Fast LiDAR odometry and mapping[C]∥2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2021: 4390-4396. |
| 8 | ZHANG J, SINGH S. LOAM: Lidar odometry and mapping in real-time[J]. Robotics: Science and Systems. 2014, 2(9): 1-9.. |
| 9 | GEIGER A, LENZ P, STILLER C, et al. Vision meets robotics: the KITTI dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| 10 | SHAN T X, ENGLOT B. LeGO-LOAM: Lightweight and ground-optimized lidar odometry and mapping on variable terrain[C]∥2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2018: 4758-4765. |
| 11 | XU X B, ZHANG L, YANG J, et al. A review of multi-sensor fusion SLAM systems based on 3D LIDAR[J]. Remote Sensing, 2022, 14(12): 2835. |
| 12 | SHAN T X, ENGLOT B, MEYERS D, et al. LIO-SAM: Tightly-coupled lidar inertial odometry via smoothing and mapping[C]∥2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2020: 5135-5142. |
| 13 | STEDER B, RUHNKE M, GRZONKA S, et al. Place recognition in 3D scans using a combination of bag of words and point feature based relative pose estimation[C]∥2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2011: 1249-1255. |
| 14 | HIMSTEDT M, FROST J, HELLBACH S, et al. Large scale place recognition in 2D LIDAR scans using Geometrical Landmark Relations[C]∥2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2014: 5030-5035. |
| 15 | KIM G, KIM A. Scan context: Egocentric spatial descriptor for place recognition within 3D point cloud map[C]∥2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2018: 4802-4809. |
| 16 | 耿丽杰, 顾健, 别晓婷, 等. 基于Scan Context与NDT-ICP相融合的果园建图方法研究[J]. 中国农机化学报, 2022, 43(7): 44-50. |
| GENG L J, GU J, BIE X T, et al. Research on orchard SLAM method based on Scan Context and NDT-ICP fusion[J]. Journal of Chinese Agricultural Mechanization, 2022, 43(7): 44-50 (in Chinese). | |
| 17 | 徐晓苏, 李诺, 姚逸卿. 基于快速回环检测的室外环境下激光雷达SLAM算法[J]. 中国惯性技术学报, 2022, 30(6): 716-722. |
| XU X S, LI N, YAO Y Q. Lidar SLAM algorithm in outdoor environment based on fast loop detection[J]. Journal of Chinese Inertial Technology, 2022, 30(6): 716-722 (in Chinese). | |
| 18 | WANG Y, SUN Z Z, XU C Z, et al. LiDAR iris for loop-closure detection[C]∥2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2020: 5769-5775. |
| 19 | 杜秀铎, 崔丽珍, 张清宇, 等. 基于LIO-SAM框架矿山环境下的点云地图构建[J]. 内蒙古科技大学学报, 2022, 41(4): 367-371. |
| DU X D, CUI L Z, ZHANG Q Y, et al. Point cloud map construction in mining environment based on LIO-SAM framework[J]. Journal of Inner Mongolia University of Science and Technology, 2022, 41(4): 367-371 (in Chinese). | |
| 20 | 杨书涛, 郁汉琪, 戴红卫, 等. 基于特征提取改进的LeGO-LOAM方法[J]. 南京工程学院学报(自然科学版), 2023, 21(3): 21-26. |
| YANG S T, YU H Q, DAI H W, et al. Improved LeGO-LOAM method based on feature extraction[J]. Journal of Nanjing Institute of Technology (Natural Science Edition), 2023, 21(3): 21-26 (in Chinese). | |
| 21 | 汪湘川,张辉,陈波,等.基于扫描上下文优化的紧耦合激光SLAM方法[J/OL].控制与决策:1-9[2024-04-02]. |
| WANG X C, ZHANG H, CHEN B, et al. A tightly-coupled LiDAR SLAM method based on scan context optimization[J/OL]. Control and Decision: 1-9 [2024-04-02] (in Chinese). |
| [1] | Wenqian PEI, Kaikai YU, Zengxu LIU, Qiyue NING, Jinglei XU. Two-stage expansion nozzle design method and numerical simulation [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 631009-631009. |
| [2] | Chengpeng WANG, Chenguang HAO, Hao LI, Longsheng XUE, Yun JIAO, Siyu WU, Zhangyu MA, Ye YUAN, Weijun LI, Puchen HOU. Application of minimum entropy production principle to analysis of shock wave/boundary layer interactions [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 631458-631458. |
| [3] | Dongfei ZHANG, Junhui GAO. High-precision numerical simulation of fan rotor-stator interaction pure tone [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(7): 130884-130884. |
| [4] | You HE, Yu LIU, Yaowen LI, Ziran DING, Kai DONG, Yaqi CUI, Caisheng ZHANG, Xueqian WANG, Zhi LI, Chen GUO. Development and prospects of multisource information fusion [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531672-531672. |
| [5] | Hongqiang LYU, Tiancheng TANG, Chenyu BAO. Numerical simulation of fluid-solid conjugate natural convection heat transfer based on SPH method [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(5): 531185-531185. |
| [6] | Dongping JIN, Dingfeng DING, Lin WU, Hao WEN, Xiaotong ZHANG, Jialiang SUN. Key technologies and prospects for separation dynamics of stacked satellite systems [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(5): 531342-531342. |
| [7] | Xian YI, Jinghao REN, Qingren LAI, Yu LIU, Qiang WANG. Icing characteristics of full-scale multi-element configurations of large aircraft: Computation and experiment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(5): 531575-531575. |
| [8] | Lixin WANG, Yilong NIU, Hailiang LIU, Jin WANG, Xianlong WANG, Ting YUE. Aircraft digital virtual flight simulation method and its application [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(5): 531543-531543. |
| [9] | Yang CHEN, Chi JIANG, Lu WANG, Shaogang GUO, Taixia SHI. Review of microwave photonic time-frequency analysis techniques for spectrum sensing in space [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630529-630529. |
| [10] | Dingqiang DAI, Xuan ZHOU, Leiting DONG, Xiasheng SUN. Research progress and prospects of digital engineering and digital twin in field of aeronautical fatigue and structural integrity [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(19): 531022-531022. |
| [11] | Qiushi CHEN, Jinglong GAO, Meng WANG, Wenkun BIAN, Haojun HAN. Overview of anti-interference technology of unmanned aerial vehicle satellite navigation system [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331797-331797. |
| [12] | Honglin LIU, Guan WANG, Shuaibin AN, Shaojie MA, Kai LIU. Online identification based strong adaptive control of hypersonic morphing vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331654-331654. |
| [13] | Miaojiao PENG, Jinwen HUANG, Dianyin HU, Rongqiao WANG, Junjie YANG, Zhigang JIA, Qinglin CHEN, Yifeng SUN, Yingqiang CAI, Kuan FAN, Zhaoyi ZHU, Xiaowen LI. Research progress on interfacial mechanical properties, damage mechanisms, and reinforcement strategies of CFRP composites for aero-engines [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 231600-231600. |
| [14] | Yuan SONG, Rui LI, Zhigang HUANG. Allocation method of RTK integrity indicators [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331655-331655. |
| [15] | Xiaotong TAN, Heyong XU. Flow feature and aero-optical effect for laser turret in transonic flow [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(14): 131493-131493. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341