ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (8): 327262.doi: 10.7527/S1000-6893.2022.27262
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Zheng LI, Jianqiao YU( ), Xinyun ZHAO
), Xinyun ZHAO
Received:2022-04-08
Revised:2022-04-27
Accepted:2022-05-21
Online:2023-04-25
Published:2022-06-08
Contact:
Jianqiao YU
E-mail:jianqiao@bit.edu.cn
CLC Number:
Zheng LI, Jianqiao YU, Xinyun ZHAO. Fixed⁃time convergent sliding mode control for agile turn of air⁃to⁃air missiles[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327262.
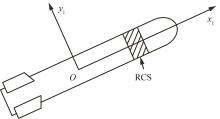
Fig. 1
Sketch of air-to-air missile configuration
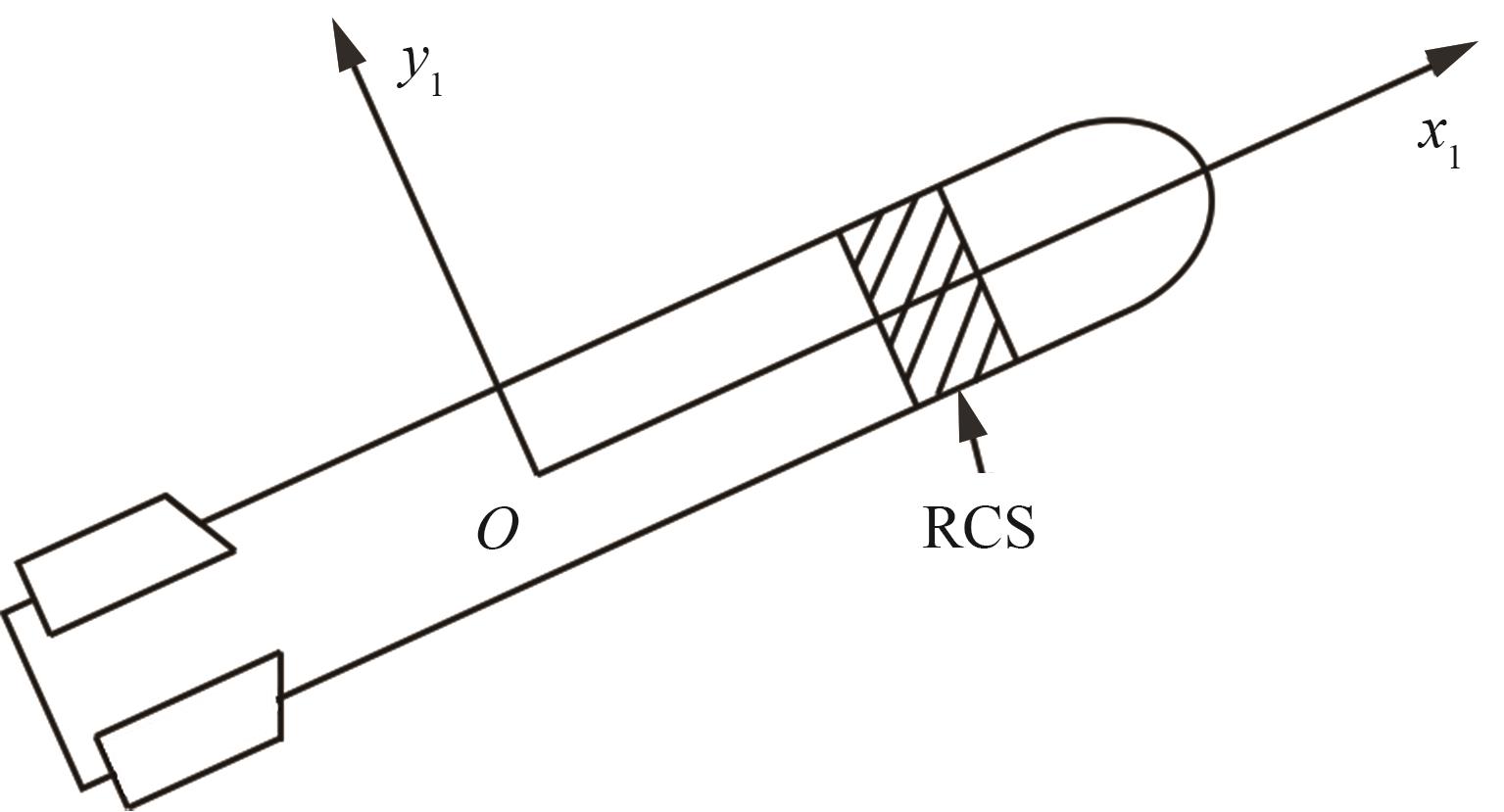
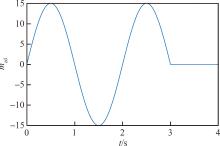
Fig. 2
Variation of pitching moment coefficient distance
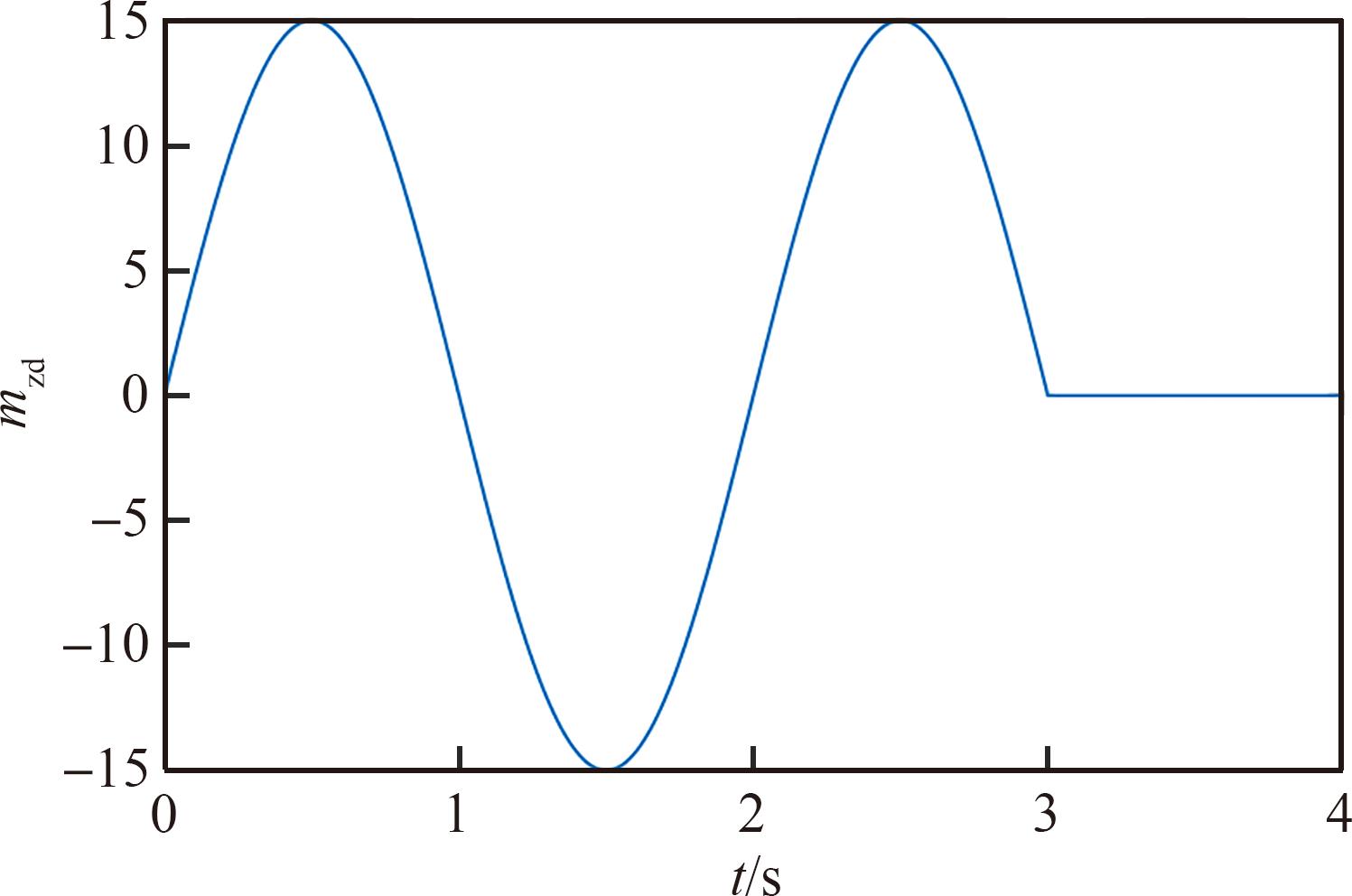
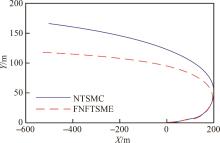
Fig. 3
Trajectory of missile agile turn
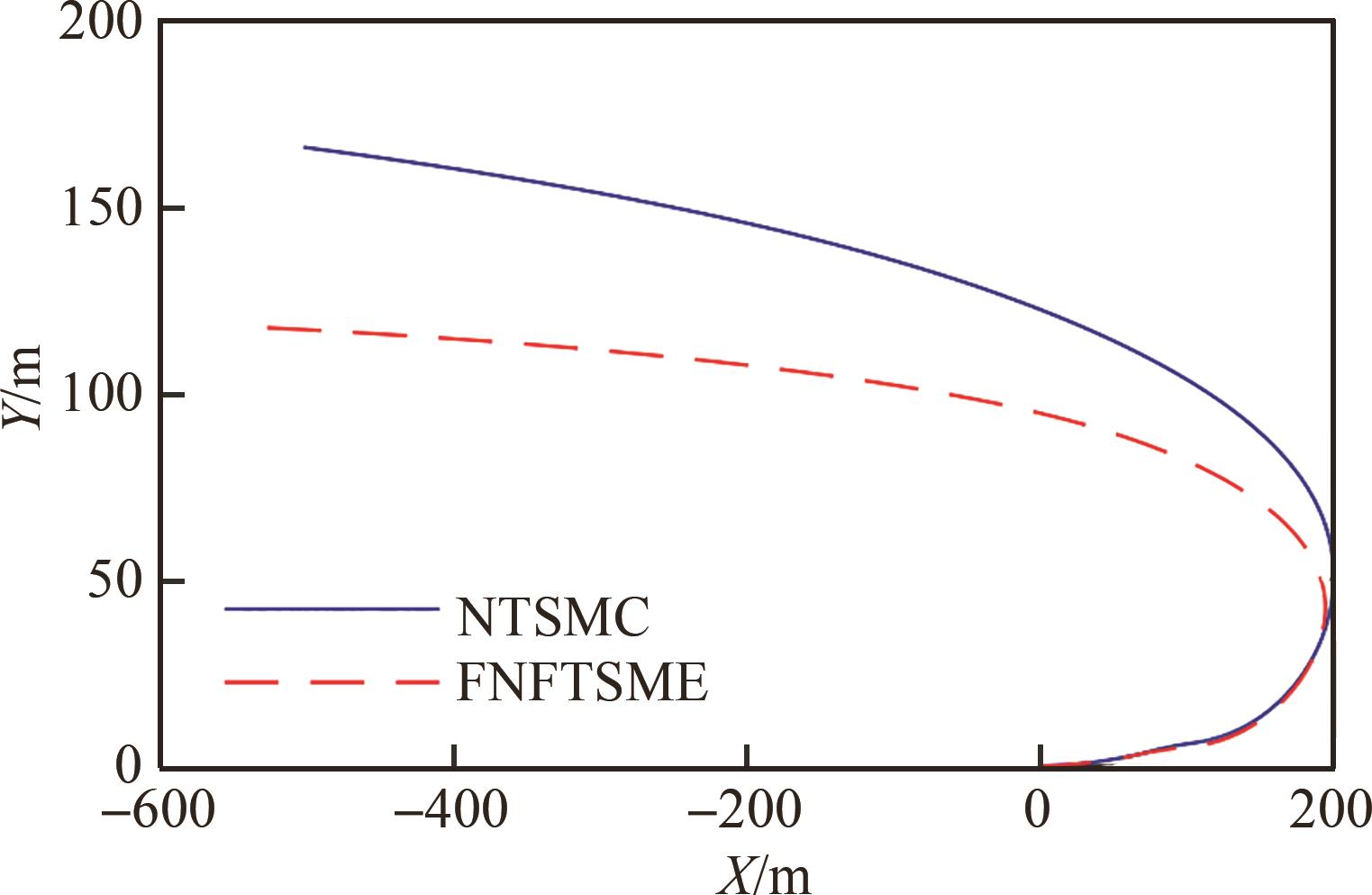
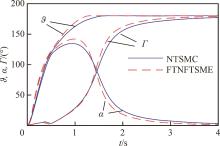
Fig. 4
Variation of ϑ,α and Γ
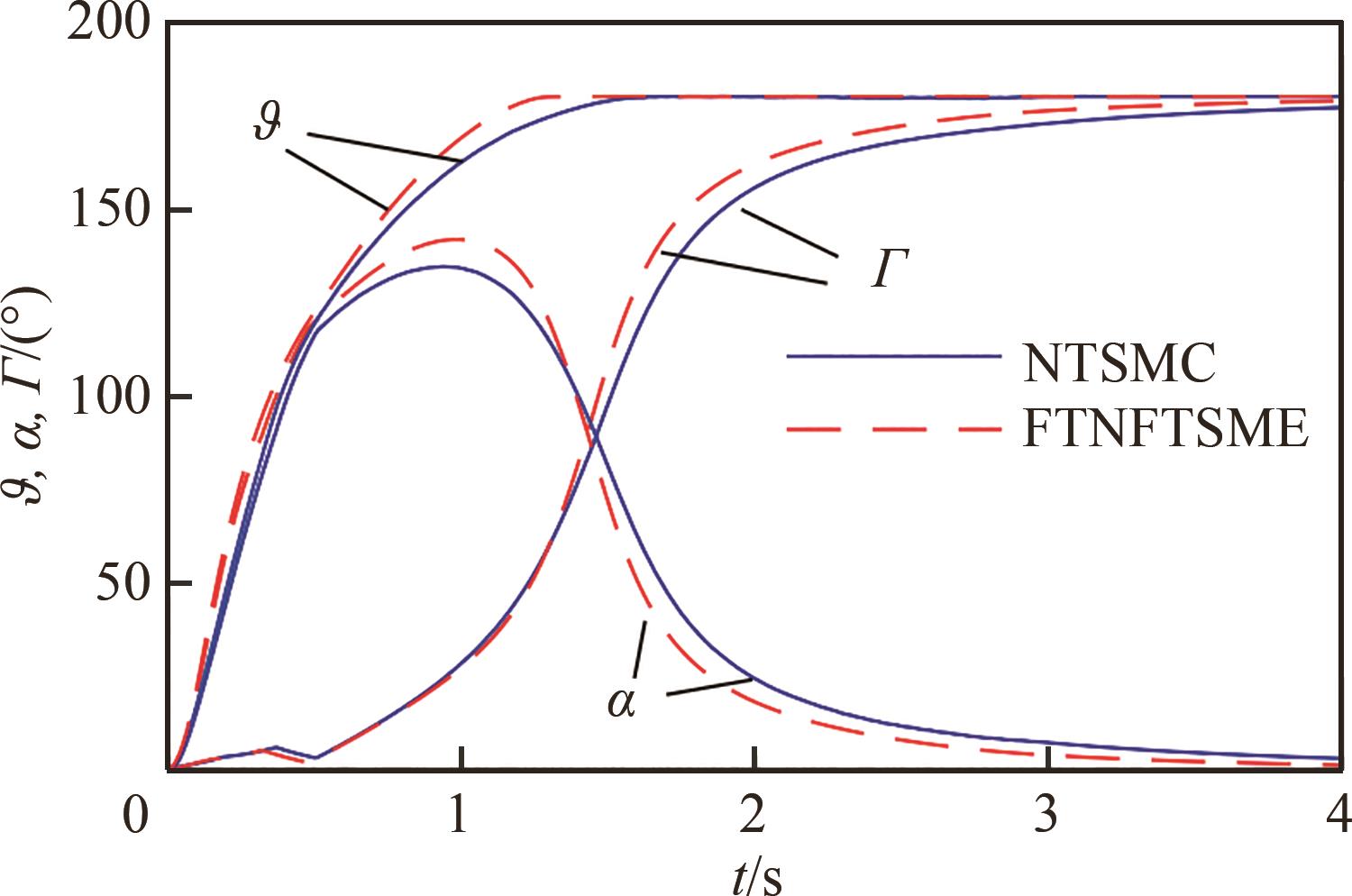
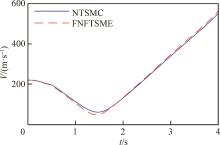
Fig. 5
Variation of velocity
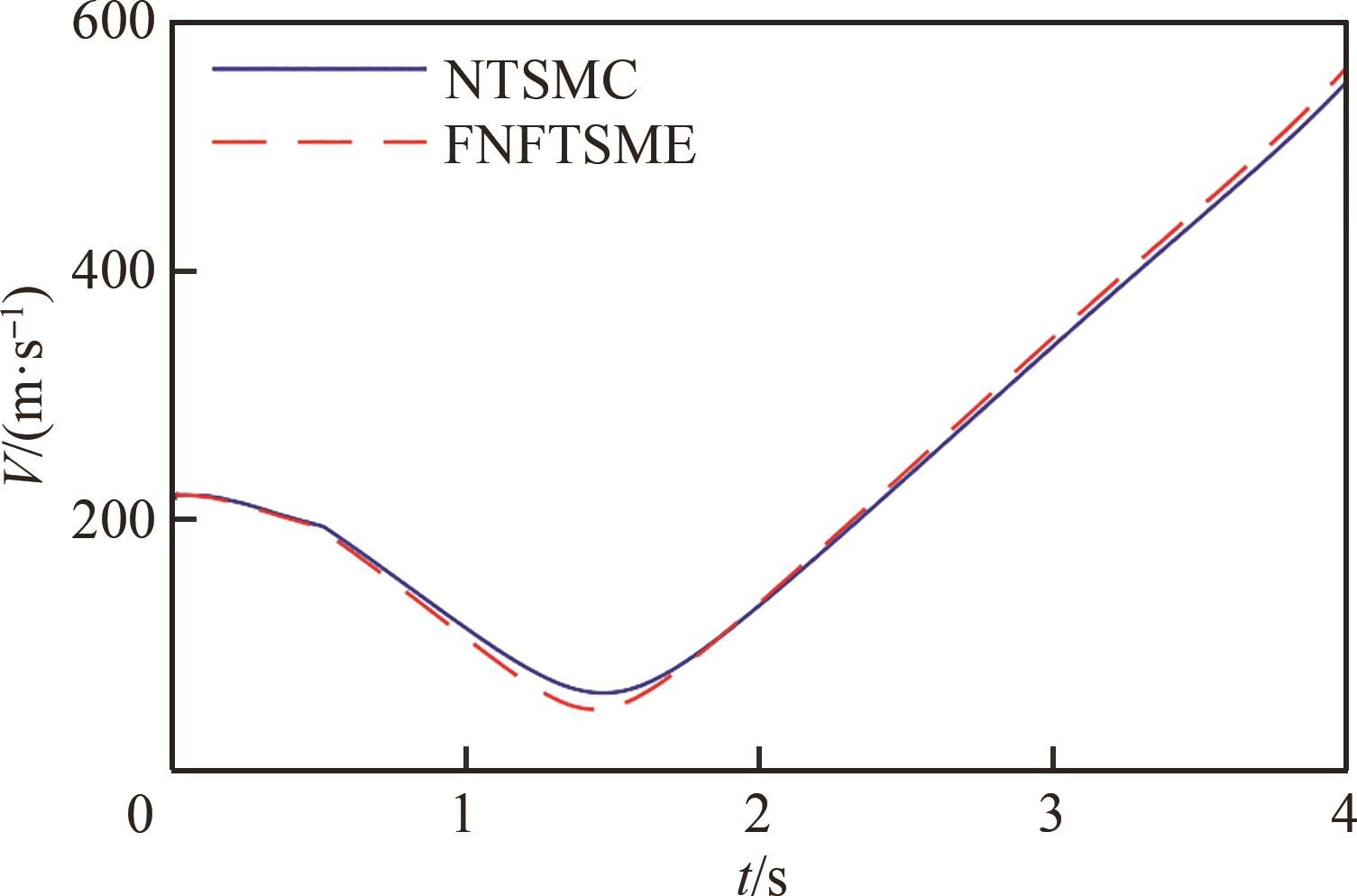
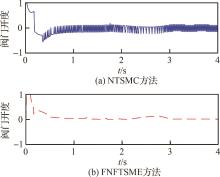
Fig. 6
Variation of valve switch for lateral force
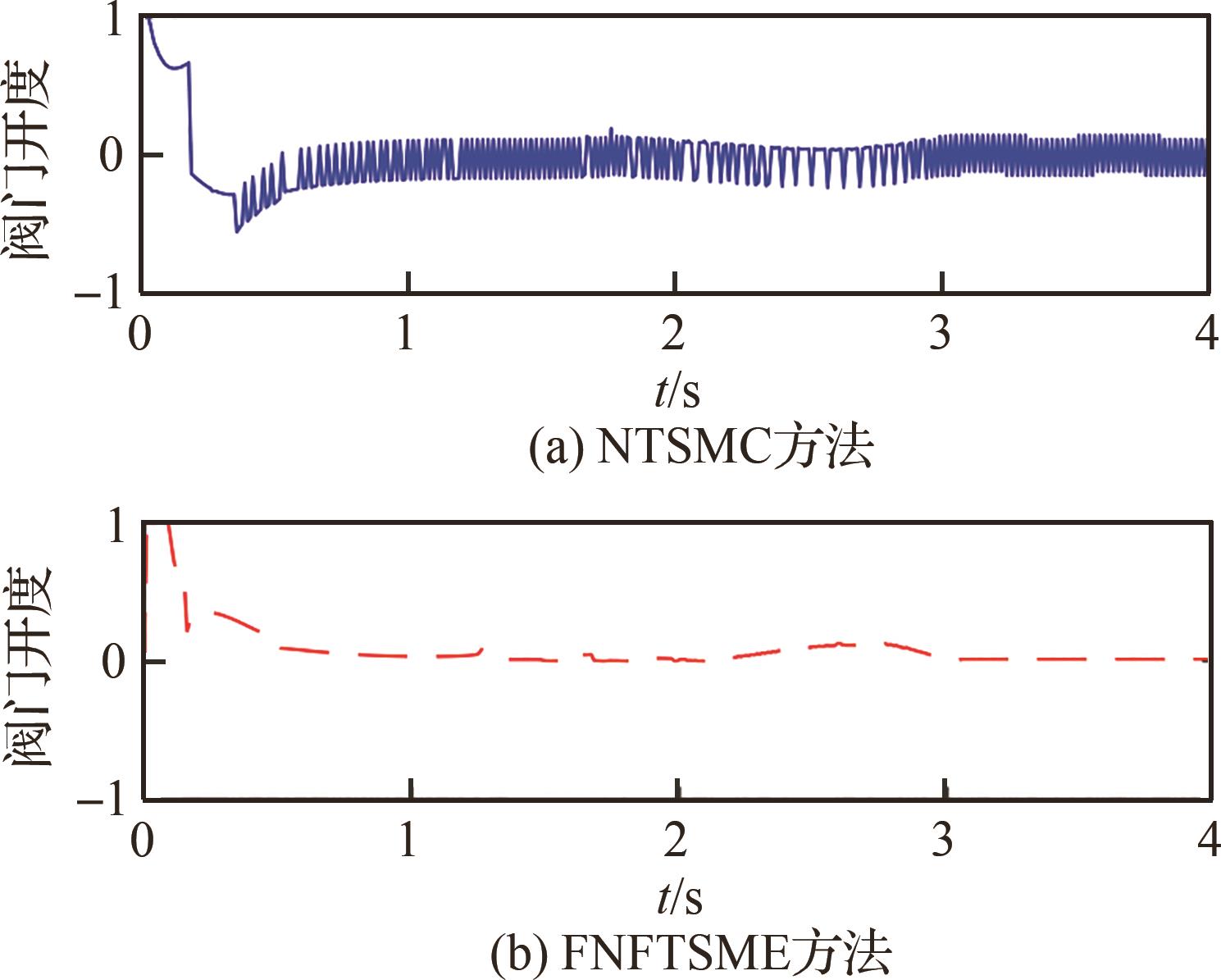
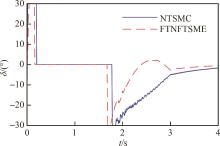
Fig. 7
Variation of fin declination
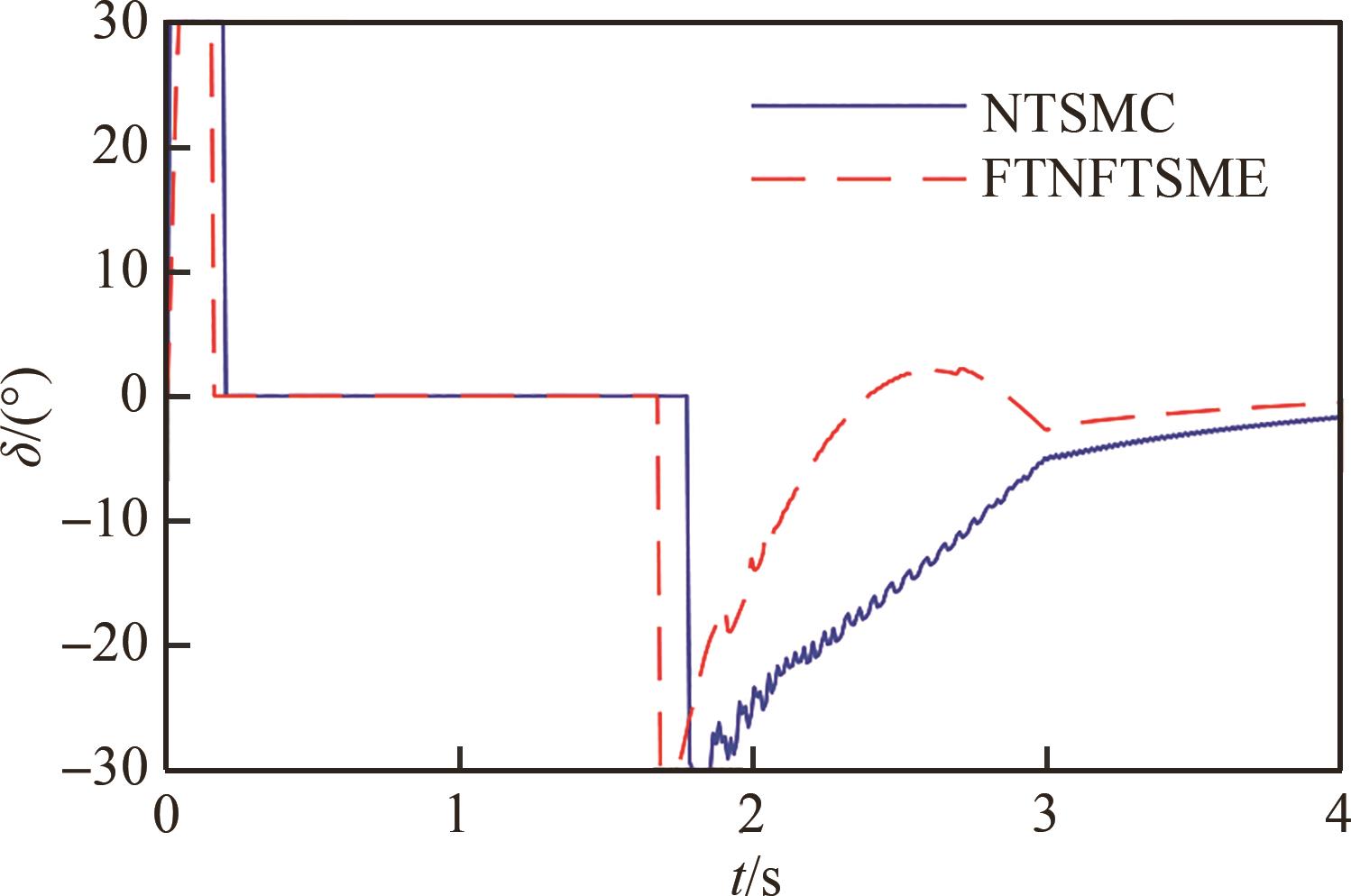
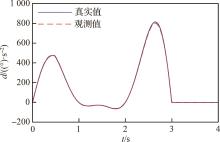
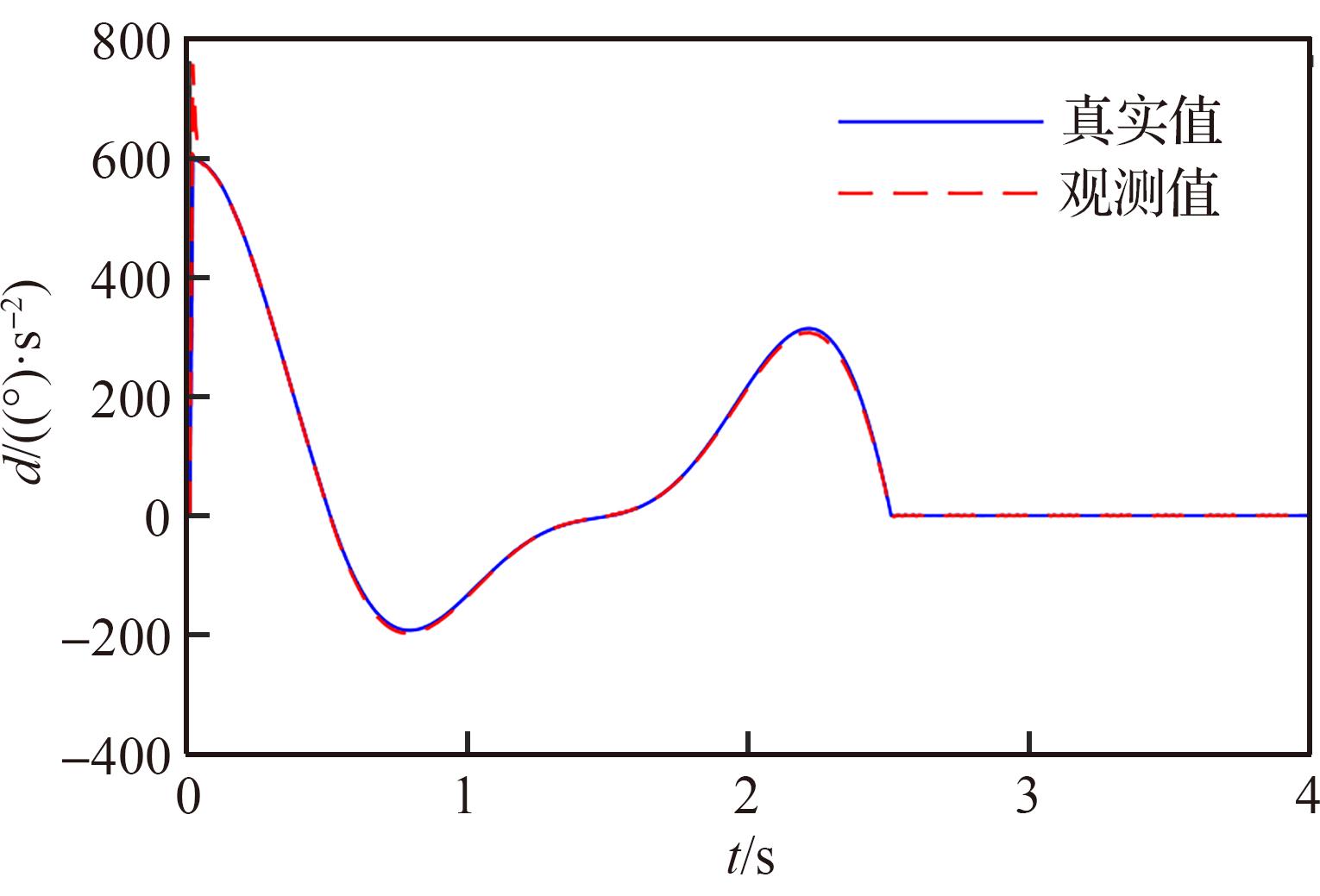
Fig. 8
Observation of disturbance
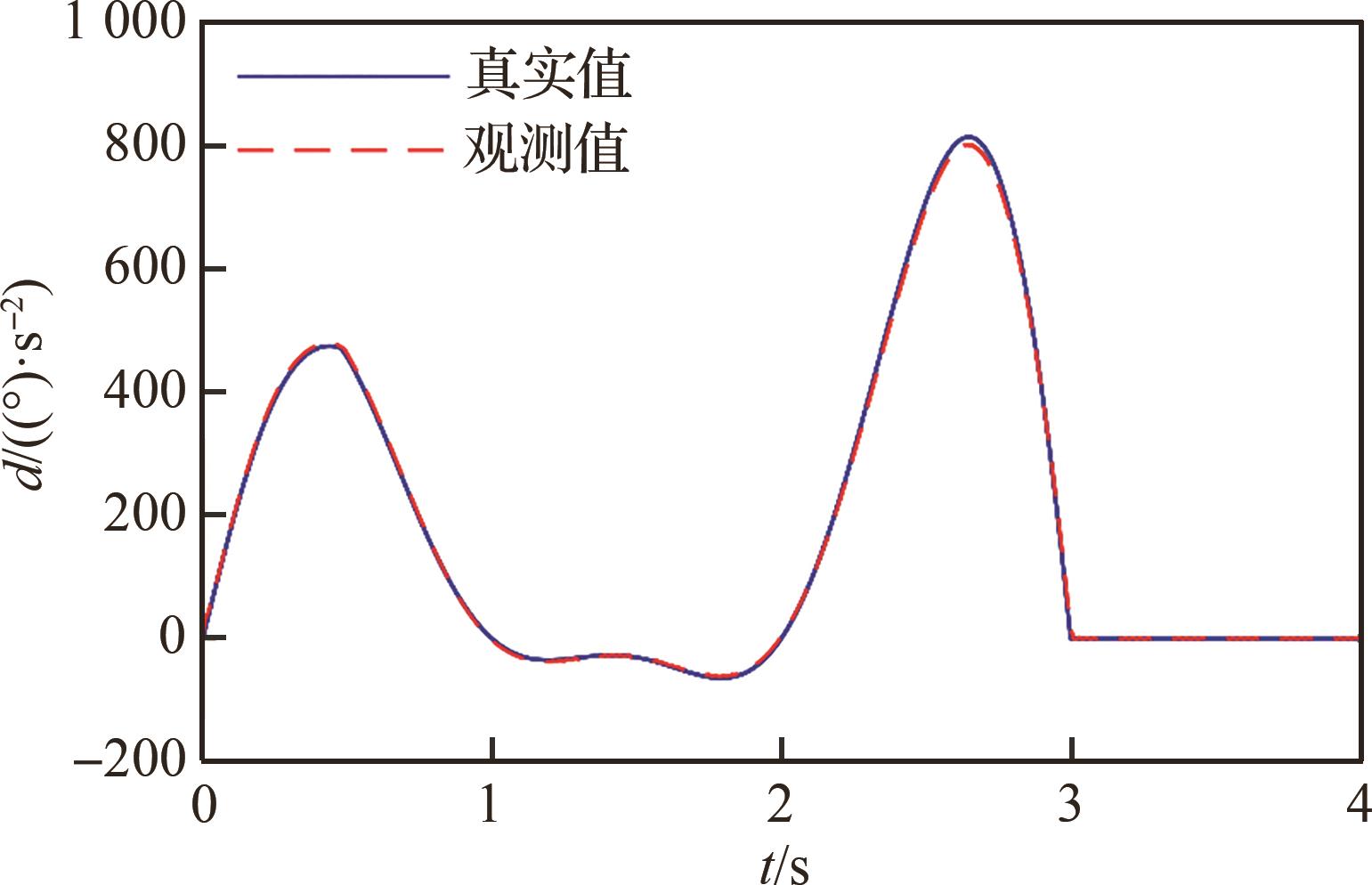

Fig. 9
Variation of ϑ,α and Γ in different situations
Fig. 10
Variation of cosine pitching moment coefficient disturbance
Fig. 11
Observation of cosine disturbance
| 1 | LEE C H, KIM T H, TAHK M J. Agile missile autopilot design using nonlinear backstepping control with time-delay adaptation[J]. Transactions of the Japan Society for Aeronautical and Space Sciences, 2014, 57(1): 9-20. |
| 2 | RYU S M, WON D Y, LEE C H, et al. High angle of attack missile autopilot design by pole placement approach[C]∥2010 3rd International Symposium on Systems and Control in Aeronautics and Astronautics. Piscataway: IEEE Press, 2010: 535-539. |
| 3 | THUKRAL A, INNOCENTI M. A sliding mode missile pitch autopilot synthesis for high angle of attack maneuvering[J]. IEEE Transactions on Control Systems Technology, 1998, 6(3): 359-371. |
| 4 | 王鹏, 陈万春, 殷兴良. 空空导弹大角度姿态反作用喷气控制[J]. 航空学报, 2005, 26(3): 263-267. |
| WANG P, CHEN W C, YIN X L. Large angle attitude reaction jet control for an air-to-air missile[J]. Acta Aeronautica et Astronautica Sinica, 2005, 26(3): 263-267 (in Chinese). | |
| 5 | WU Y Q, YU X H, MAN Z H. Terminal sliding mode control design for uncertain dynamic systems[J]. Systems & Control Letters, 1998, 34(5): 281-287. |
| 6 | MA Y Y. High angle of attack command generation technique and tracking control for agile missiles[J]. Aerospace Science and Technology, 2015, 45: 324-334. |
| 7 | MA Y Y, TANG S J, GUO J, et al. Agile missile autopilot design for high angle of attack maneuvering with aerodynamic uncertainty[J]. Transactions of the Japan Society for Aeronautical and Space Sciences, 2015, 58(5): 270-279. |
| 8 | YANG L, YANG J Y. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems[J]. International Journal of Robust and Nonlinear Control, 2011, 21(16): 1865-1879. |
| 9 | POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems[J]. IEEE Transactions on Automatic Control, 2012, 57(8): 2106-2110. |
| 10 | POLYAKOV A, EFIMOV D, PERRUQUETTI W. Robust stabilization of MIMO systems in finite/fixed time[J]. International Journal of Robust and Nonlinear Control, 2016, 26(1): 69-90. |
| 11 | LI H J, CAI Y L. On SFTSM control with fixed-time convergence[J]. IET Control Theory & Applications, 2017, 11(6): 766-773. |
| 12 | NI J K, LIU L, LIU C X, et al. Fast fixed-time nonsingular terminal sliding mode control and its application to chaos suppression in power system[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2017, 64(2): 151-155. |
| 13 | 张宽桥, 杨锁昌, 李宝晨, 等. 考虑驾驶仪动态特性的固定时间收敛制导律[J]. 航空学报, 2019, 40(11): 323227. |
| ZHANG K Q, YANG S C, LI B C, et al. Fixed-time convergent guidance law considering autopilot dynamics[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(11): 323227 (in Chinese). | |
| 14 | 王伯平, 王亮, 盛永智. 固定时间收敛的再入飞行器全局滑模跟踪制导律[J]. 宇航学报, 2017, 38(3): 296-303. |
| WANG B P, WANG L, SHENG Y Z. A global sliding mode based tracking guidance law with fixed-time convergence for reentry vehicle[J]. Journal of Astronautics, 2017, 38(3): 296-303 (in Chinese). | |
| 15 | 刘祥, 李爱军, 郭永, 等. 固定时间收敛的空空导弹直接力/气动力复合控制[J]. 哈尔滨工业大学学报, 2019, 51(9): 29-34, 42. |
| LIU X, LI A J, GUO Y, et al. Fixed-time convergence blended control for air-to-air missile with lateral thrusters and aerodynamic force[J]. Journal of Harbin Institute of Technology, 2019, 51(9): 29-34, 42 (in Chinese). | |
| 16 | ZHANG L. Fixed-time extended state observer based non-singular fast terminal sliding mode control for a VTVL reusable launch vehicle[J]. Aerospace Science and Technology, 2018, 82-83: 70-79. |
| 17 | 梅亚飞, 廖瑛, 龚轲杰, 等. SE(3)上航天器姿轨耦合固定时间容错控制[J]. 航空学报, 2021, 42(11): 525089. |
| MEI Y F, LIAO Y, GONG K J, et al. Fixed-time fault-tolerant control for coupled spacecraft on SE(3)[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(11): 525089 (in Chinese). | |
| 18 | 袁利, 马广富, 董经纬, 等. 航天器近距离交会的固定时间终端滑模控制[J]. 宇航学报, 2018, 39(2): 195-205. |
| YUAN L, MA G F, DONG J W, et al. Fixed-time terminal sliding mode control for close-range rendezvous[J]. Journal of Astronautics, 2018, 39(2): 195-205 (in Chinese). | |
| 19 | ZHANG N. A fast finite-time convergent guidance law with nonlinear disturbance observer for unmanned aerial vehicles collision avoidance[J]. Aerospace Science and Technology, 2019, 86: 204-214. |
| 20 | 郭建国, 鲁宁波, 周军. 高超声速飞行器有限时间耦合模糊控制[J]. 航空学报, 2020, 41(11): 623838. |
| GUO J G, LU N B, ZHOU J. Fuzzy control of finite time attitude coupling in hypersonic vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(11): 623838 (in Chnese). | |
| 21 | 刘璟龙, 张崇峰, 邹怀武, 等. 基于干扰观测器的柔性空间机器人在轨精细操作控制方法[J]. 航空学报, 2021, 42(1): 523899. |
| LIU J L, ZHANG C F, ZOU H W, et al. On-orbit precise operation control method for flexible joint space robots based on disturbance observer[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 523899 (in Chinese). | |
| 22 | DOU L Q, SU P H, ZONG Q, et al. Fuzzy disturbance observer-based dynamic surface control for air-breathing hypersonic vehicle with variable geometry inlets[J]. IET Control Theory & Applications, 2018, 12(1): 10-19. |
| 23 | ZHANG H G, HAN J, LUO C M, et al. Fault-tolerant control of a nonlinear system based on generalized fuzzy hyperbolic model and adaptive disturbance observer[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(8): 2289-2300. |
| 24 | WISE K A, ROY D J B. Agile missile dynamics and control[J]. Journal of Guidance, Control, and Dynamics, 1998, 21(3): 441-449. |
| 25 | INNOCENTI M, THUKRAL A. Simultaneous reaction jet and aerodynamic control of missile systems: AIAA-1993-3739[R]. Reston: AIAA, 1993. |
| 26 | ZOU A M. Fixed-time attitude tracking control for rigid spacecraft[J]. Automatica, 2020, 113: 108792. |
| 27 | ZHANG Y, TANG S J, GUO J. Adaptive terminal angle constraint interception against maneuvering targets with fast fixed-time convergence[J]. International Journal of Robust and Nonlinear Control, 2018, 28(8): 2996-3014. |
| 28 | 赵国荣, 李晓宝, 刘帅, 等. 自适应非奇异快速终端滑模固定时间收敛制导律[J]. 北京航空航天大学学报, 2019, 45(6): 1059-1070. |
| ZHAO G R, LI X B, LIU S, et al. Adaptive nonsingular fast terminal sliding mode guidance law with fixed-time convergence[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(6): 1059-1070 (in Chinese). | |
| 29 | 马悦悦, 唐胜景, 郭杰. 基于改进Terminal滑模的导弹大角度机动控制[J]. 北京航空航天大学学报, 2016, 42(3): 472-480. |
| MA Y Y, TANG S J, GUO J. Large angle maneuvering control for missiles based on improved Terminal sliding mode method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(3): 472-480 (in Chinese). | |
| 30 | HAN J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906. |
| 31 | CUI L. Adaptive super-twisting trajectory tracking control for an unmanned aerial vehicle under gust winds[J]. Aerospace Science and Technology, 2021, 115: 106833. |
| 32 | 罗世彬, 吴瑕, 魏才盛. 可重复使用飞行器的保性能姿态跟踪控制方法[J]. 航空学报, 2021, 42(11): 524660. |
| LUO S B, WU X, WEI C S. A novel attitude tracking control with guaranteed performance for reusable launch vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(11): 524660 (in Chinese). | |
| 33 | 刘佳琪, 王伟, 林德福, 等. 考虑驾驶仪动态性能的指令滤波反演制导律[J]. 航空学报, 2020, 41(12): 324123. |
| LIU J Q, WANG W, LIN D F, et al. Command filtered backstepping guidance law considering autopilot dynamics[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(12): 324123 (in Chinese). | |
| 34 | CAO H Z, XU Y, WANG L X. ESO-based nonlinear flying boom attitude control with the handling qualities requirement[J]. Aerospace Science and Technology, 2022, 120: 107235. |
| 35 | LI P, YANG H J, LI H B, et al. Nonlinear ESO-based tracking control for warehouse mobile robots with detachable loads[J]. Robotics and Autonomous Systems, 2022, 149: 103965. |
| 36 | YANG H J, CHENG H, ZUO Z Q, et al. ESO-based lateral control for electrical vehicles with unmodeled tire dynamics on uneven road[J]. Mechanical Systems and Signal Processing, 2022, 177: 109132. |
| 37 | WU R, WEI C Z, YANG F, et al. FxTDO‐based non‐singular terminal sliding mode control for second‐order uncertain systems[J]. IET Control Theory & Applications, 2018, 12(18): 2459-2467. |
| [1] | Hongmiao ZHOU, Jianqiao YU, Yong YU. Dynamic modeling and bifurcation analysis of agile turn of parafoil⁃missile system [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 229012-229012. |
| [2] | Chengpeng LIU, Wenping SONG, Changhao GAO, Shaoqiang HAN, Yue WANG, Zhonghua HAN. Air-to-air missile post-stall flip backward launch method [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 129880-129880. |
| [3] | Qian ZHANG, Guanwei YAN, Qin NIE, Ruihai CHEN, Jianing LIU. Aircraft-missile cooperative guidance method based on trajectory numerical optimization of long-range air-to-air missiles [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(17): 530138-530138. |
| [4] | Xianzong BAI, Kebo LI, Haojian LI, Wei DONG. Differential geometric guidance law design based on fixed⁃time convergent error dynamics method [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 329712-329712. |
| [5] | Yihui HAN, Jun HU, Yong YU, Jianqiao YU. Wind tunnel experimental verification of aerodynamic control force of cross⁃shaped flexible control surface [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(13): 129280-129280. |
| [6] | Hongyan ZHANG, Wei WANG, Shiwei CHEN, Yi JI, Jiaqi LIU. Integrated guidance and control design based on fully actuated system method [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628891-628891. |
| [7] | Zeyang YIN, Youpeng XING, Fei HAN, Caisheng WEI, Yuxin LIAO. Fully-actuated prescribed performance control of spacecraft formation for flying cooperatively around non-cooperative target [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628904-628904. |
| [8] | Xu ZHAO, Guoyuan QI, Xinchen YU, Jianbing HU, Xia LI. Compensation function observer and its application in flight vehicle attitude control [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327224-327224. |
| [9] | Shihao XU, Yingzi GUAN, Jialun PU, Changzhu WEI. Predefined-time sliding mode control for VTHL launch vehicle in reentry phase [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 326857-326857. |
| [10] | Zhongsen WANG, Yuxin LIAO, Caisheng WEI, Ting DAI. Fast terminal sliding mode fault⁃tolerant control of hypersonic vehicle with guaranteed performance [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328476-328476. |
| [11] | Liang ZHANG, Danyu LI, Naigang CUI, Yuan LI. Full flight profile prescribed performance control for vertical take-off and vertical landing reusable launch vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(23): 628103-628103. |
| [12] | LI Ning, LIU Zhiyong, WANG Na, YANG Lei. Simulation on antenna servo control system based on DUEA [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(2): 324986-324986. |
| [13] | LI Xia, QI Guoyuan, GUO Xitong, ZHAO Xu. High-order differential feedback control and its application in quadrotor UAV [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(12): 326047-326047. |
| [14] | WEI Kepeng, HU Jian, YAO Jianyong, XING Haochen, LE Guigao. Fast terminal sliding mode control of neural networks for aeromechanical actuators [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(6): 624540-624540. |
| [15] | LUO Shibin, WU Xia, WEI Caisheng. A novel attitude tracking control with guaranteed performance for reusable launch vehicle [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524660-524660. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341