Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (8): 332821.doi: 10.7527/S1000-6893.2025.32821
• Electronics and Electrical Engineering and Control • Previous Articles
Mingxing QIN1, Le WANG1, Bing LI2, Jianxiang XI1( ), Liangyu ZHAO3
), Liangyu ZHAO3
Received:2025-09-24
Revised:2025-10-30
Accepted:2025-11-27
Online:2025-12-09
Published:2025-12-08
Contact:
Jianxiang XI
E-mail:xijx07@mails.tsinghua.edu.cn
Supported by:CLC Number:
Mingxing QIN, Le WANG, Bing LI, Jianxiang XI, Liangyu ZHAO. Leader-follower spatial-temporal cooperative guidance law with gain-tunable prescribed-time convergence[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(8): 332821.
Fig.1
Three-dimensional missile-target engagement geometry
Fig.2
Performance of Lemma 4 under different parameters κ
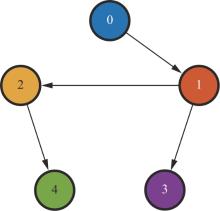
Fig.3
Communication link
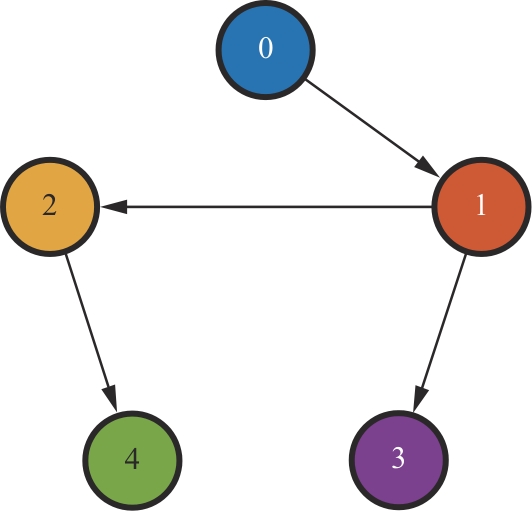
Table 1
Initial states and desired terminal line-of-sight angles of missiles
| 参数 | 领弹0 | 从弹1 | 从弹2 | 从弹3 | 从弹4 |
|---|---|---|---|---|---|
| 13 000 | 12 000 | 14 000 | 13 500 | 12 500 | |
| -320 | -400 | -380 | -350 | -360 | |
| -50 | -30 | -30 | -20 | -40 | |
| 0.63 | 0.246 | -0.355 | -0.779 | -0.24 | |
| -30 | -15 | -60 | -50 | -60 | |
| 10 | 45 | 40 | 60 | 30 | |
| 1.404 | 0.67 | 0.521 | -0.882 | 0.12 | |
| 30 | 60 | 10 | 30 | 40 |
Fig.4
Simulation results in Case 1
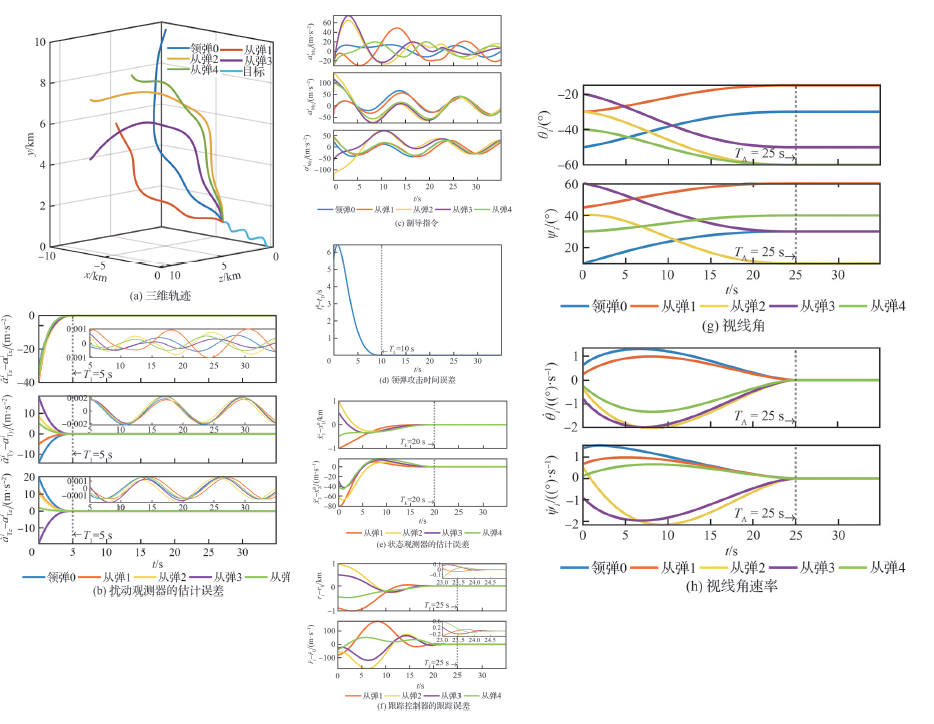
Table 2
Performance indicators in Case 1
| 导弹 | 脱靶量/(10-5 m) | 攻击时间误差/(10-4 s) | 视线俯仰角误差/(10-5(°)) | 视线方位角误差/(10-6(°)) |
|---|---|---|---|---|
| 领弹0 | 2.457 | 1 | 1.185 | 3.693 |
| 从弹1 | 8.541 | 1 | 0.964 | 7.747 |
| 从弹2 | 5.549 | 1 | 1.276 | 0.343 |
| 从弹3 | 1.210 | 1 | 1.252 | 4.997 |
| 从弹4 | 0.179 | 1 | 1.166 | 9.643 |

Fig.5
Simulation results in Case 2
Fig.6
Simulation results for different impact time

Fig.7
Simulated results of guidance law proposed in Ref.[34]
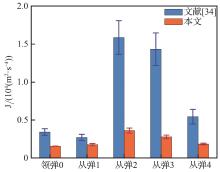
Fig.8
Energy consumption comparison
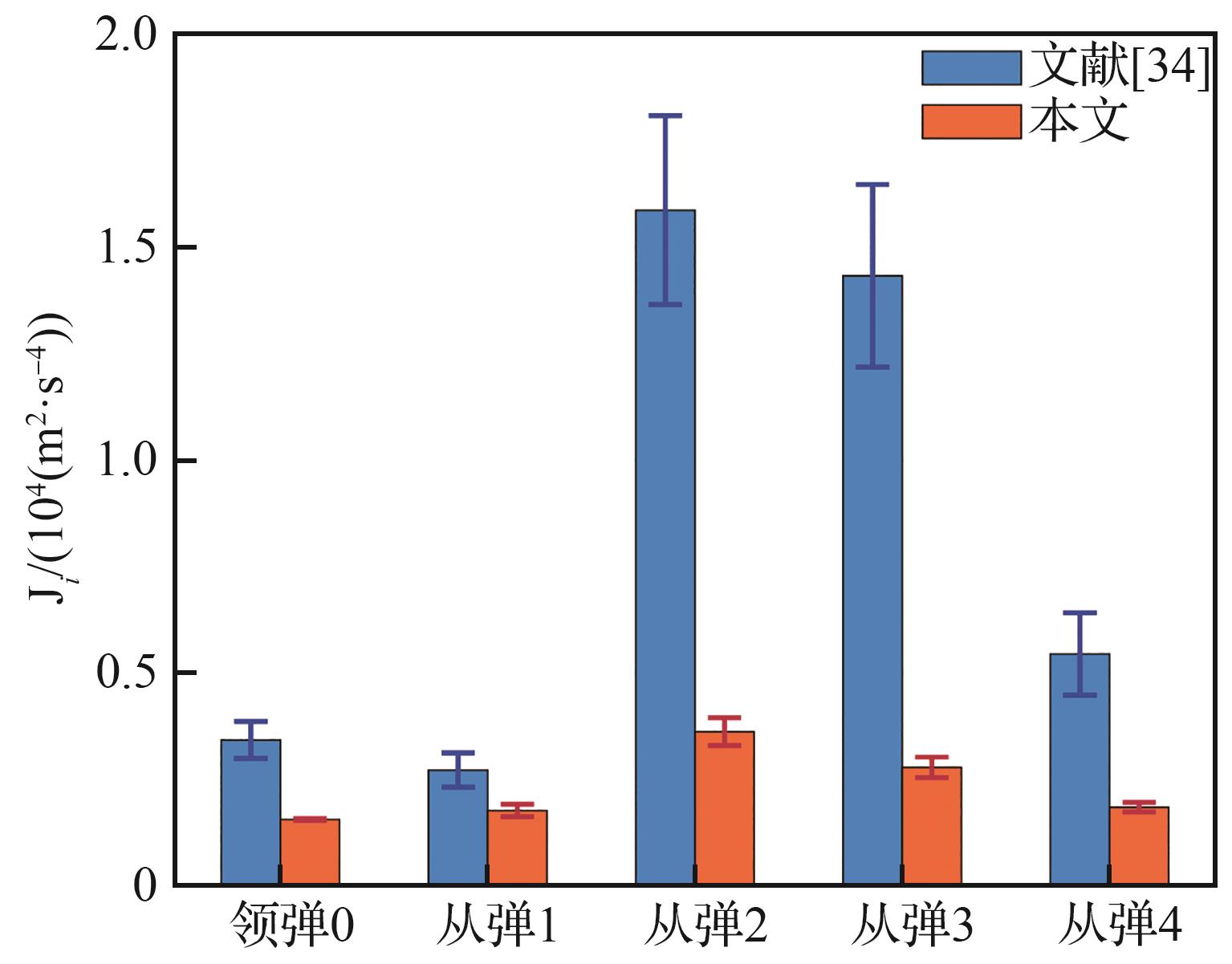
Table 3
Performance indicators for guidance law in Ref.[34]
| 导弹 | ||||
|---|---|---|---|---|
| [1] | 董希旺, 于江龙, 化永朝, 等. 集群系统智能协同IOODA技术体系架构与关键技术[J]. 航空学报, 2025, 46 (4): 030911. |
| DONG X W, YU J L, HUA Y Z, et al. Architecture and key technologies of intelligent cooperative IOODA technology system for swarm systems[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46 (4): 030911 (in Chinese). | |
| [2] | 董伟, 易鑫, 张后军, 等. 攻击角度和时间精确控制的制导律设计[J]. 航空学报, 2025, 46 (4): 330787. |
| DONG W, YI X, ZHANG H J, et al. Design of guidance law with precise impact angle and time control[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330787 (in Chinese). | |
| [3] | JEON I S, LEE J I, TAHK M J. Impact-time-control guidance law for anti-ship missiles[J]. IEEE Transactions on Control Systems Technology, 2006, 14(2): 260-266. |
| [4] | LEE J I, JEON I S, TAHK M J. Guidance law to control impact time and angle[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(1): 301-310. |
| [5] | 赵世钰, 周锐. 基于协调变量的多导弹协同制导[J]. 航空学报, 2008, 29(6): 1605-1611. |
| ZHAO S Y, ZHOU R. Multi-missile cooperative guidance using coordination variables[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(6): 1605-1611 (in Chinese). | |
| [6] | 王晓芳, 郑艺裕, 林海. 多导弹协同作战制导律研究[J]. 弹道学报, 2014, 26(1): 61-66. |
| WANG X F, ZHENG Y Y, LIN H. Research on guidance law for cooperative attack of multiple missiles[J]. Journal of Ballistics, 2014, 26(1): 61-66 (in Chinese). | |
| [7] | 赵军民, 王荣刚, 李新国, 等. 基于落角和时间约束的巡飞弹末端协同打击策略[J]. 西北工业大学学报, 2024, 42(3): 386-395. |
| ZHAO J M, WANG R G, LI X G, et al. Cooperative attack strategy during the terminal guidance phase for loitering munitions based on impact angle and impact time constraints[J]. Journal of Northwestern Polytechnical University, 2024, 42(3): 386-395 (in Chinese). | |
| [8] | YOU H, CHANG X L, ZHAO J F, et al. Three-dimensional impact-angle-constrained cooperative guidance strategy against maneuvering target[J]. ISA Transactions, 2023, 138: 262-280. |
| [9] | CHENG M, LIU H, XI J X, et al. Data-driven robust optimal guidance with input saturation via differential graphical game strategy for cooperative aerial vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(6): 8612-8621. |
| [10] | JIANG Z J, YANG X X, WANG C, et al. A DMPC-based three-dimensional cooperative guidance scheme with impact time and impact angle constraints[J]. Measurement and Control, 2025, 58(5): 582-613. |
| [11] | LI G F, TANG Q P, ZUO Z Y, et al. Resilient cooperative guidance for leader-follower flight vehicles against maneuvering target[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(3): 6310-6324. |
| [12] | CHEN S W, WANG W, FAN J F. Three-dimensional prescribed performance cooperative guidance without relative distance measurement[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(5): 12809-12825. |
| [13] | 刘子超, 王江, 王鹏, 等. 时间约束多导弹协同制导律[J]. 航空学报, 2024, 45(S1): 730607. |
| LIU Z C, WANG J, WANG P, et al. Time-constrained multi-missile cooperative guidance law[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 221-233 (in Chinese). | |
| [14] | ZHAN Y A, LI S Y, ZHOU D. Information fusion-based three-dimensional two-stage optimal cooperative predictive guidance law[J]. Aerospace Science and Technology, 2024, 155: 109533. |
| [15] | QIN M X, WANG L, XI J X, et al. Bounded-gain prescribed-time robust spatiotemporal cooperative guidance law for UAVs under jointly strongly connected topologies[J]. Drones, 2025, 9(7): 474. |
| [16] | WANG C Y, WANG W L, DONG W, et al. Multiple-stage spatial-temporal cooperative guidance without time-to-go estimation[J]. Chinese Journal of Aeronautics, 2024, 37(9): 399-416. |
| [17] | LI G F, LI Q, WU Y J, et al. Leader-following cooperative guidance law with specified impact time[J]. Science China Technological Sciences, 2020, 63(11): 2349-2356. |
| [18] | YOU H, CHANG X L, ZHAO J F, et al. Three-dimensional impact-angle-constrained fixed-time cooperative guidance algorithm with adjustable impact time[J]. Aerospace Science and Technology, 2023, 141: 108574. |
| [19] | YOU H, CHANG X L, ZHAO J F. Three-dimensional line-of-sight-angle-constrained leader-following cooperative interception guidance law with prespecified impact time[J]. Chinese Journal of Aeronautics, 2025, 38(1): 103151. |
| [20] | 尤浩, 常新龙, 赵久奋, 等. 带落角约束的新型领弹-从弹固定时间协同制导律[J]. 国防科技大学学报, 2024, 46(6): 64-76. |
| YOU H, CHANG X L, ZHAO J F, et al. Novel leader-following missiles fixed-time cooperative guidance law with impact angle constraints[J]. Journal of National University of Defense Technology, 2024, 46(6): 64-76 (in Chinese). | |
| [21] | 王雨辰, 王伟, 林时尧, 等. 考虑攻击时间及空间角度约束的三维自适应滑模协同制导律设计[J]. 兵工学报, 2023, 44(9): 2778-2790. |
| WANG Y C, WANG W, LIN S Y, et al. Three-dimensional adaptive sliding mode cooperative guidance law with impact time and angle constraints[J]. Acta Armamentarii, 2023, 44(9): 2778-2790 (in Chinese). | |
| [22] | 尤浩, 常新龙, 赵久奋, 等. 带攻击角度约束的三维领弹-从弹时间协同制导律[J]. 兵工学报, 2023, 44(11): 3369-3381. |
| YOU H, CHANG X L, ZHAO J F, et al. Three-dimensional leader-follower cooperative guidance law with impact angle constraints[J]. Acta Armamentarii, 2023, 44(11): 3369-3381 (in Chinese). | |
| [23] | ZHAN Y A, LI S Y, ZHOU D. Time-to-go based three-dimensional multi-missile spatio-temporal cooperative guidance law: A novel approach for maneuvering target interception[J]. ISA Transactions, 2024, 149: 178-195. |
| [24] | WANG Y J, SONG Y D, HILL D J, et al. Prescribed-time consensus and containment control of networked multiagent systems[J]. IEEE Transactions on Cybernetics, 2019, 49(4): 1138-1147. |
| [25] | SINHA A, KUMAR S R. Cooperative target capture using predefined-time consensus over fixed and switching networks[J]. Aerospace Science and Technology, 2022, 127: 107686. |
| [26] | 池海红, 丁栖航, 张国良. 预定时间多导弹三维协同制导律[J]. 宇航学报, 2023, 44(8): 1238-1250. |
| CHI H H, DING Q H, ZHANG G L. Three-dimensional cooperative guidance law for multiple missiles with predefined-time convergence[J]. Journal of Astronautics, 2023, 44(8): 1238-1250 (in Chinese). | |
| [27] | 常亚南, 王先至, 李国飞. 考虑攻击时间和角度约束的预定时间收敛协同制导方法[J/OL].北京航空航天大学学报, (2024-09-20)[2025-09-01]. . |
| CHANG Y N, WANG X Z, LI G F. Prescribed-time convergent cooperative guidance method with impact time and angle constraints[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, (2024-09-20)[2025-09-01]. (in Chinese). | |
| [28] | NING B D, HAN Q L, ZUO Z Y, et al. Fixed-time and prescribed-time consensus control of multiagent systems and its applications: A survey of recent trends and methodologies[J]. IEEE Transactions on Industrial Informatics, 2023, 19(2): 1121-1135. |
| [29] | WU Y J, AN X M, HUA Y Y, et al. Prescribed-time cooperative guidance law with seeker-less followers against multiple targets[J]. ISA Transactions, 2025, 164: 75-90. |
| [30] | 马文卉, 符文星, 方洋旺, 等. 通信拓扑切换下的预定时间分组协同制导方法[J]. 宇航学报, 2023, 44(1): 86-98. |
| MA W H, FU W X, FANG Y W, et al. Prescribed-time cooperative guidance law with switching communication topologies[J]. Journal of Astronautics, 2023, 44(1): 86-98 (in Chinese). | |
| [31] | MA W H, GUO X W. Prescribed-time cooperative guidance law for multi-UAV with intermittent communication[J]. Drones, 2024, 8(12): 748. |
| [32] | SONG Y D, YE H F, LEWIS F L. Prescribed-time control and its latest developments[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(7): 4102-4116. |
| [33] | FAZELIASL S B, MOOSAPOUR S S, MOBAYEN S. Three-dimensional robust prescribed-time cooperative guidance for leader-follower strategy based on state observer: Simultaneous attack with impact angle control[J]. ISA Transactions, 2025, 163: 267-279. |
| [34] | WANG X, CAI Y L, DENG Y F, et al. Predefined-time spatial-temporal cooperative guidance law with leader-follower strategy[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(3): 6053-6069. |
| [35] | WANG Z K, FANG Y W, FU W X, et al. Prescribed-time cooperative guidance law against manoeuvring target with input saturation[J]. International Journal of Control, 2023, 96(5): 1177-1189. |
| [36] | WANG Z K, FU W X, FANG Y W, et al. Prescribed-time cooperative guidance law against maneuvering target based on leader-following strategy[J]. ISA Transactions, 2022, 129: 257-270. |
| [37] | CUI L, JIN N, CHANG S P, et al. Prescribed-time guidance scheme design for missile salvo attack[J]. Journal of the Franklin Institute, 2022, 359(13): 6759-6782. |
| [38] | ZHANG L, LI D Y, JING L, et al. Appointed-time cooperative guidance law with line-of-sight angle constraint and time-to-go control[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(3): 3142-3155. |
| [39] | LIU T R, CHEN Y Y, LI S H. Adaptive cooperative estimation and guidance against unknown maneuvering target[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(4): 9129-9140. |
| [40] | CUI B, WANG Y J, LIU K, et al. Sliding mode based prescribed-time consensus tracking control of second-order multi-agent systems[J]. Automatica, 2023, 158: 111296. |
| [41] | XIE S Z, CHEN Q. Predefined-time disturbance estimation and attitude control for rigid spacecraft[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2024, 71(4): 2089-2093. |
| [1] | Yuheng LIU, Li YANG, Qilong HUANG. Optimizing air and missile defense strategies with explainable hierarchical reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(8): 332786-332786. |
| [2] | Hao ZHANG, Jianing LIU, Zhi XU, Yuanxin YANG. Trajectory prediction method of incoming missiles based on improved inverse reinforcement learning in aircraft active defense mode [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(8): 332753-332753. |
| [3] | Qinglei HU, Shuxin ZHANG, Tuo HAN, Qingyun WANG. Terminal guidance law under multiple constraints of high-order reshaping of relative range profile [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531405-531405. |
| [4] | Wei DONG, Xin YI, Houjun ZHANG, Chunyan WANG, Fang DENG. Design of guidance law with precise impact angle and time control [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330787-330787. |
| [5] | Yuxin GAO, Shaojie ZHANG, Chunsheng LIU. Adaptive event-triggered guidance law of missile under cyber attacks [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730892-730892. |
| [6] | Hongmiao ZHOU, Jianqiao YU, Yong YU. Dynamic modeling and bifurcation analysis of agile turn of parafoil⁃missile system [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 229012-229012. |
| [7] | Chengpeng LIU, Wenping SONG, Changhao GAO, Shaoqiang HAN, Yue WANG, Zhonghua HAN. Air-to-air missile post-stall flip backward launch method [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 129880-129880. |
| [8] | Qian ZHANG, Guanwei YAN, Qin NIE, Ruihai CHEN, Jianing LIU. Aircraft-missile cooperative guidance method based on trajectory numerical optimization of long-range air-to-air missiles [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(17): 530138-530138. |
| [9] | Yihui HAN, Jun HU, Yong YU, Jianqiao YU. Wind tunnel experimental verification of aerodynamic control force of cross⁃shaped flexible control surface [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(13): 129280-129280. |
| [10] | Yunchong ZHU, Yangang LIANG, Kebo LI, Yuanhe LIU. Task assignment algorithm for intelligent missile swarm based on PSO and RRT [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727354-727354. |
| [11] | Zheng LI, Jianqiao YU, Xinyun ZHAO. Fixed⁃time convergent sliding mode control for agile turn of air⁃to⁃air missiles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327262-327262. |
| [12] | Yuanhe LIU, Kebo LI, Shaoming HE, Yangang LIANG. Flying range control guidance for varying⁃speed missiles based on optimal error dynamics [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 326909-326909. |
| [13] | Yiting TAN, Wuxing JING, Changsheng GAO, Ruoming AN. Multiple constrained analytical capture region for hypersonic maneuvering target interception [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(22): 328436-328436. |
| [14] | Haojian LI, Yuanhe LIU, Yangang LIANG, Kebo LI. Prescribed performance guidance law with field-of-view and impact angle constraints [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528764-528764. |
| [15] | Leliang REN, Yong XIAN, Shaopeng LI, Gang LEI, Wei WU, Bing LI. A neural network model for impact point prediction of ballistic missile based on improved second-order optimizer with parallel learning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(14): 327964-327964. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341