Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (22): 331759.doi: 10.7527/S1000-6893.2025.31759
• Electronics and Electrical Engineering and Control • Previous Articles
Yuanzhuo WANG, Honghua DAI( ), Xiaokui YUE
), Xiaokui YUE
Received:2025-01-03
Revised:2025-03-18
Accepted:2025-04-27
Online:2025-05-12
Published:2025-05-08
Contact:
Honghua DAI
E-mail:hhdai@nwpu.edu.cn
Supported by:CLC Number:
Yuanzhuo WANG, Honghua DAI, Xiaokui YUE. Quasi-spectral trajectory optimization for vehicle based on actual dynamic equations[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 331759.
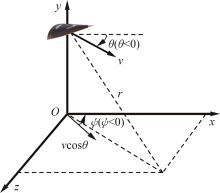
Fig.1
Flight-path coordinate system
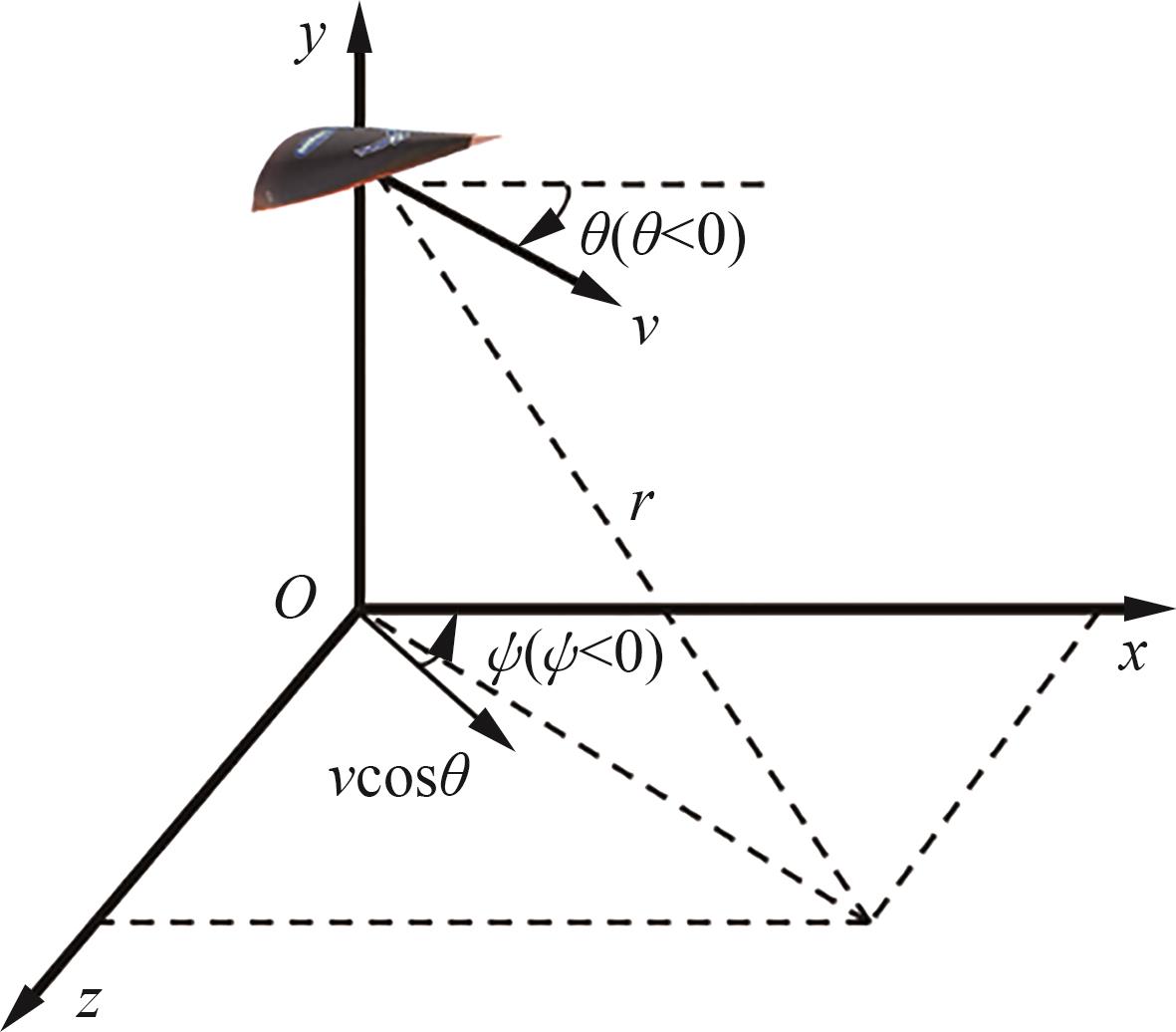
Table 1
Initial and desired terminal states in Se coordinate system
| 状态向量 | 经度/( | 纬度/( | 地心距/km | 速度/(m·s-1) | 航迹角/( | 航向角/( |
|---|---|---|---|---|---|---|
| 初值 | 120 | 30 | 35+Re | 1 700 | ||
| 终端值 | 120.466 8 | 30.407 3 | 15+Re | 1 100 |
Table 2
Initial and desired terminal states in Sk coordinate system
| 状态向量 | 航程/km | 高度/km | 侧向位置/km | 速度/(m·s-1) | 航迹角/( | 航向角/( |
|---|---|---|---|---|---|---|
| 初值 | 0 | 35 | 0 | 1 700 | ||
| 终端值 | 45 | 15 | 45 | 1 100 |
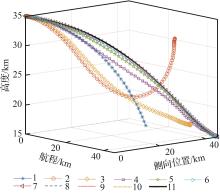
Fig.2
3D trajectories obtained by proposed method
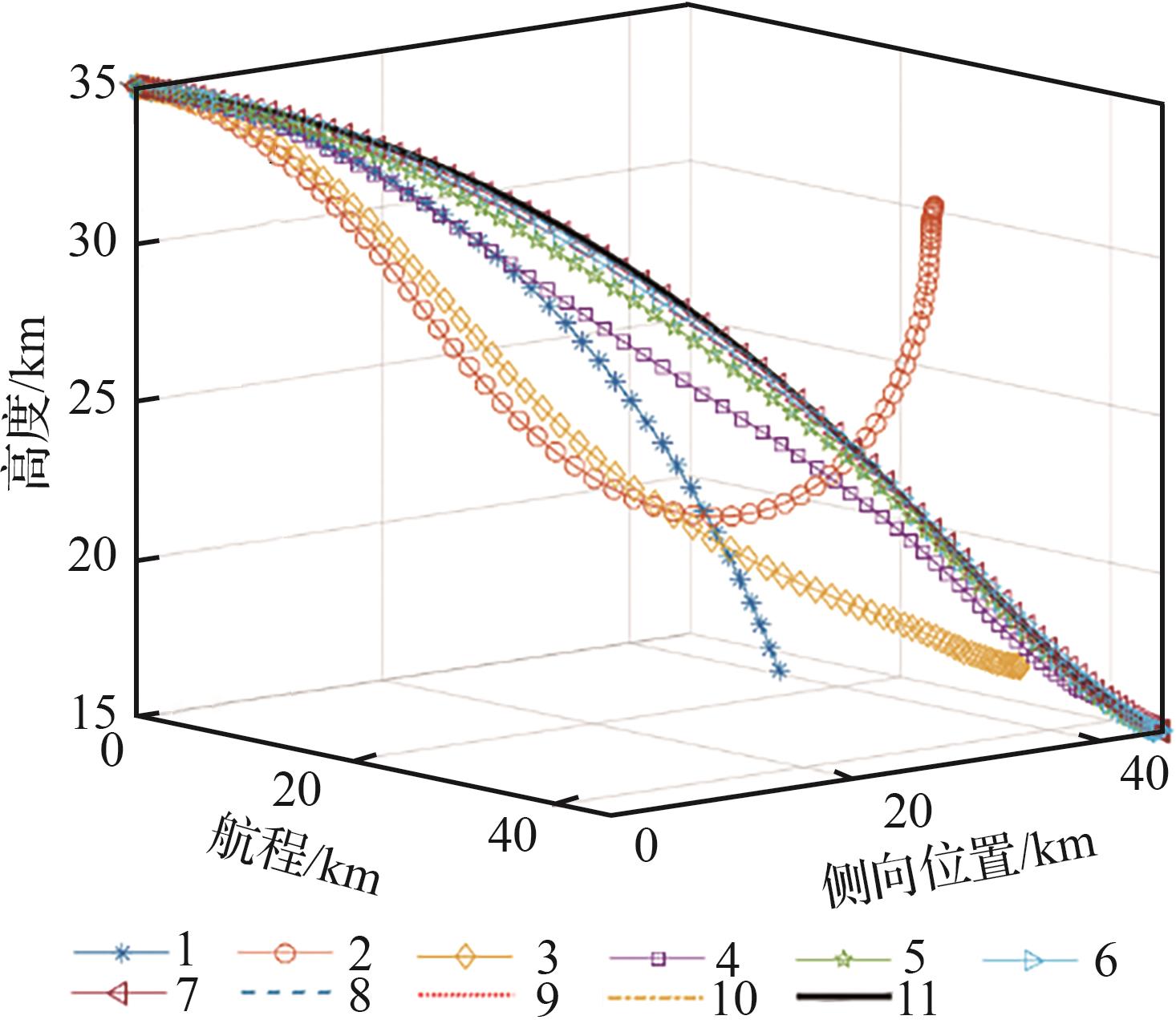
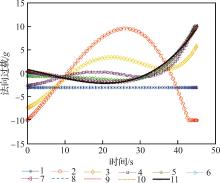
Fig.3
Curves of normal overload with time obtained by proposed method
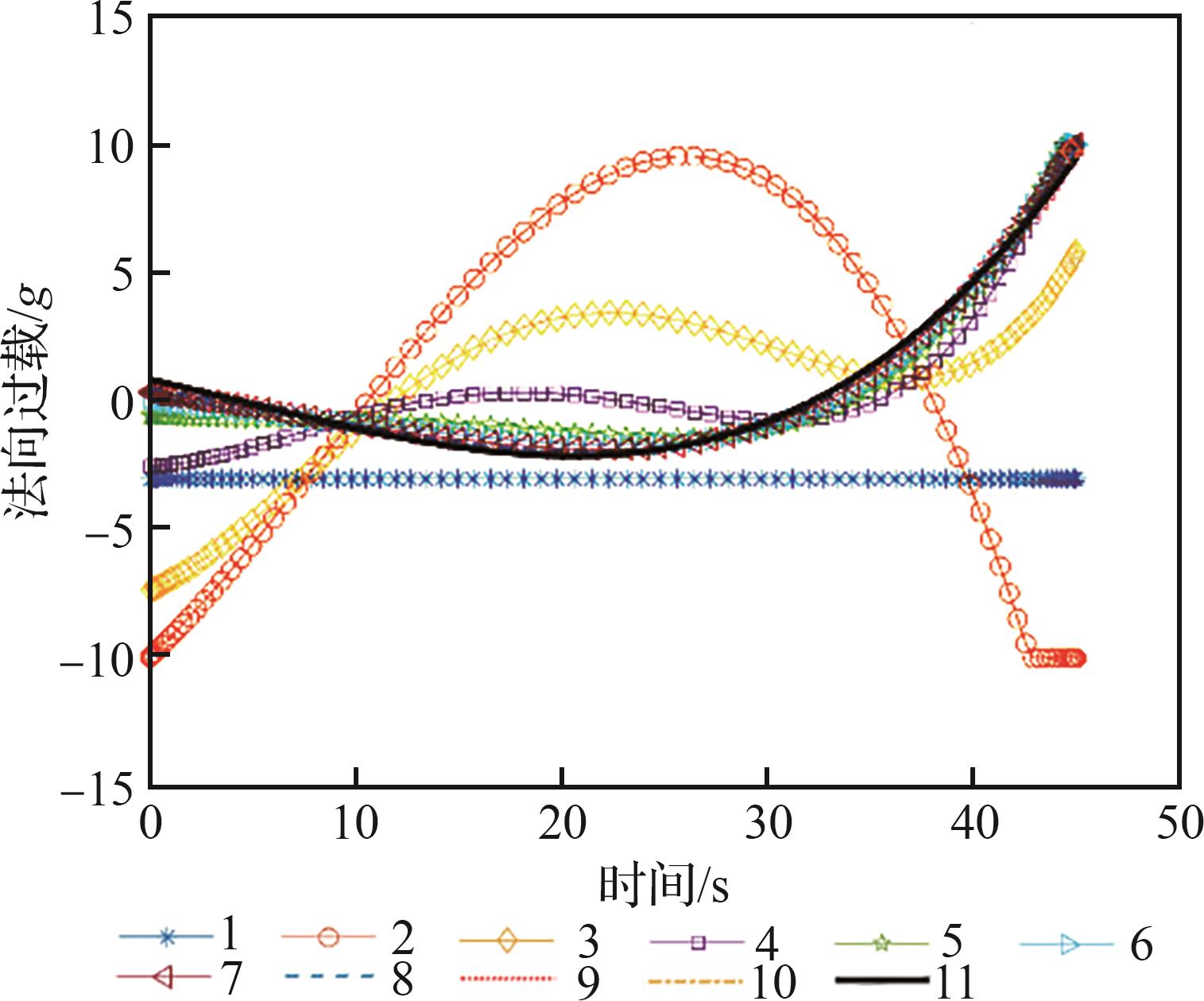
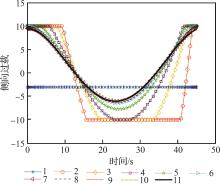
Fig.4
Curves of lateral overload with time obtained by proposed method
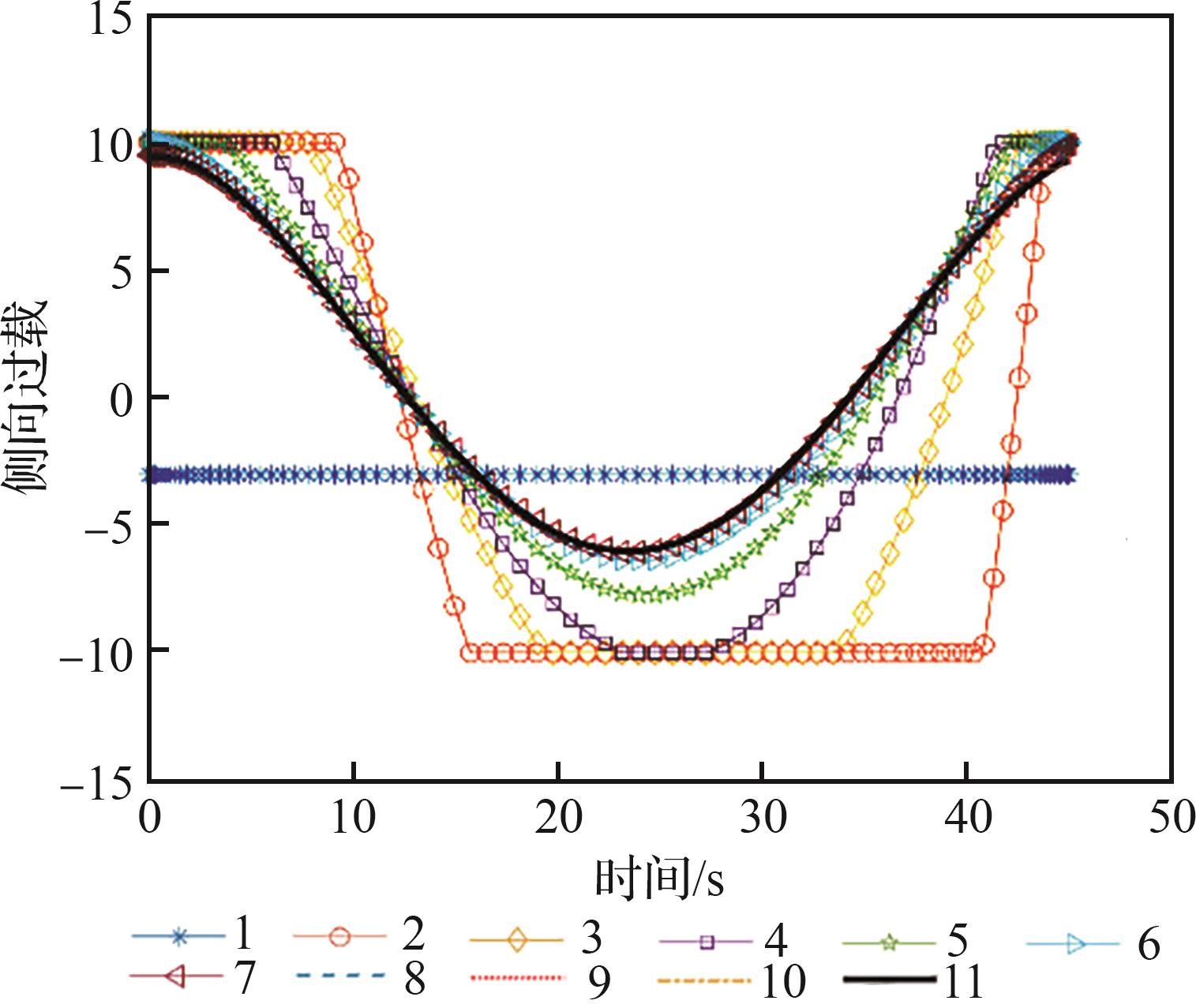
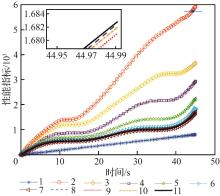
Fig.5
Curves of performance index with time obtained by proposed method

Table 3
Terminal control errors after each round of iteration
| 迭代次数 | 航程/m | 高度/m | 侧向位置/m | 速度/(m·s-1) | 航迹角/( | 航向角/( |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | ||||||
| 3 | ||||||
| 4 | ||||||
| 5 | ||||||
| 6 | ||||||
| 7 | ||||||
| 8 | ||||||
| 9 | ||||||
| 10 | ||||||
| 11 | ||||||
| 均值 | ||||||
| 标准差 |
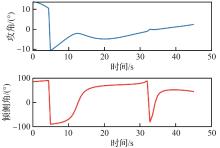
Fig.6
Curves of angles of attack and heel with time obtained by proposed method
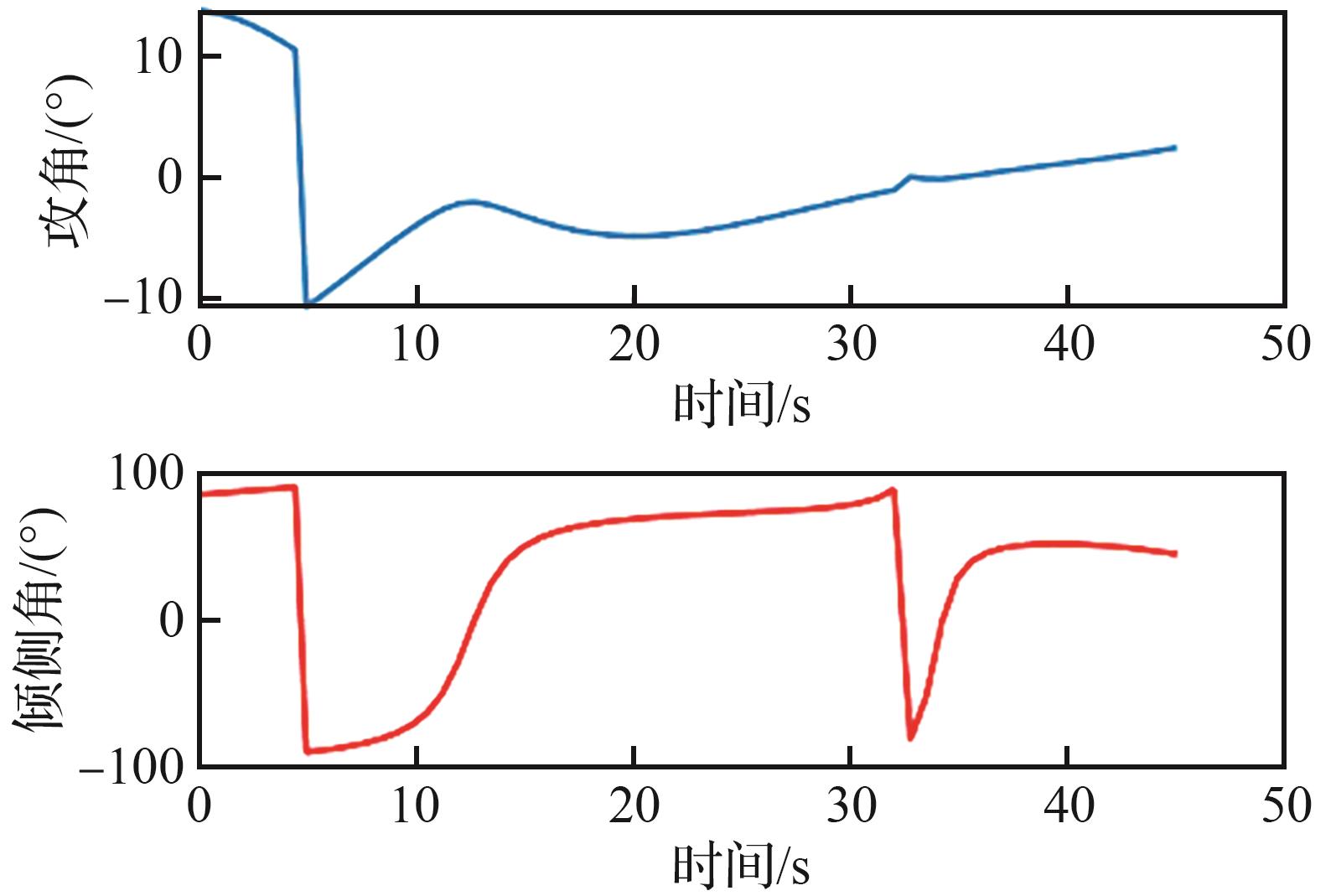
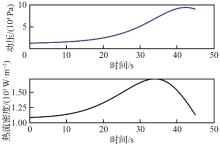
Fig.7
Curves of dynamic pressure and heat flux with time obtained by proposed method
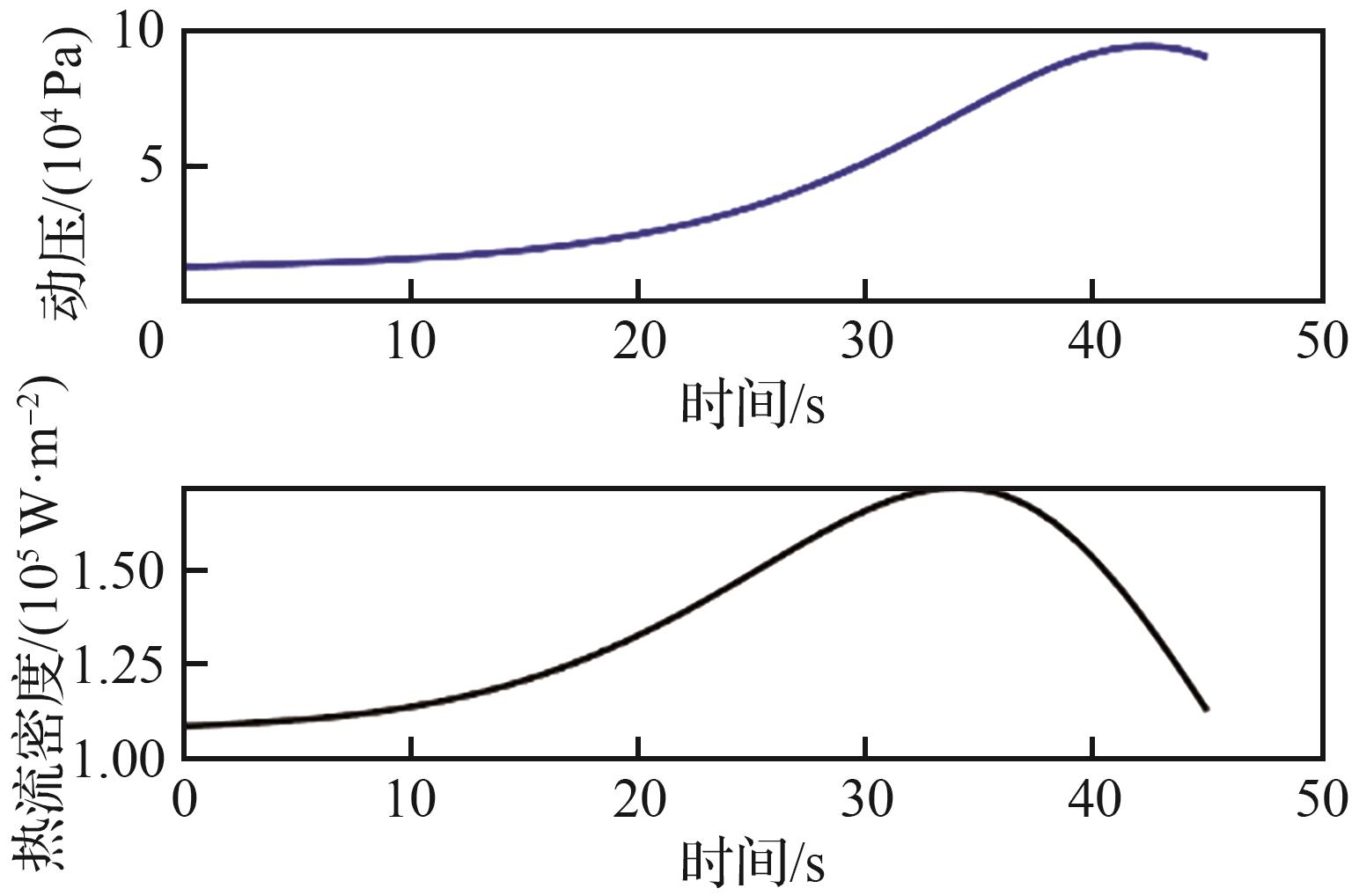
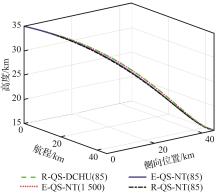
Fig.8
3D trajectories obtained by R-QS-DCHU(85), E-QS-NT(1 500), E-QS-NT(85) and R-QS-NT(85) methods
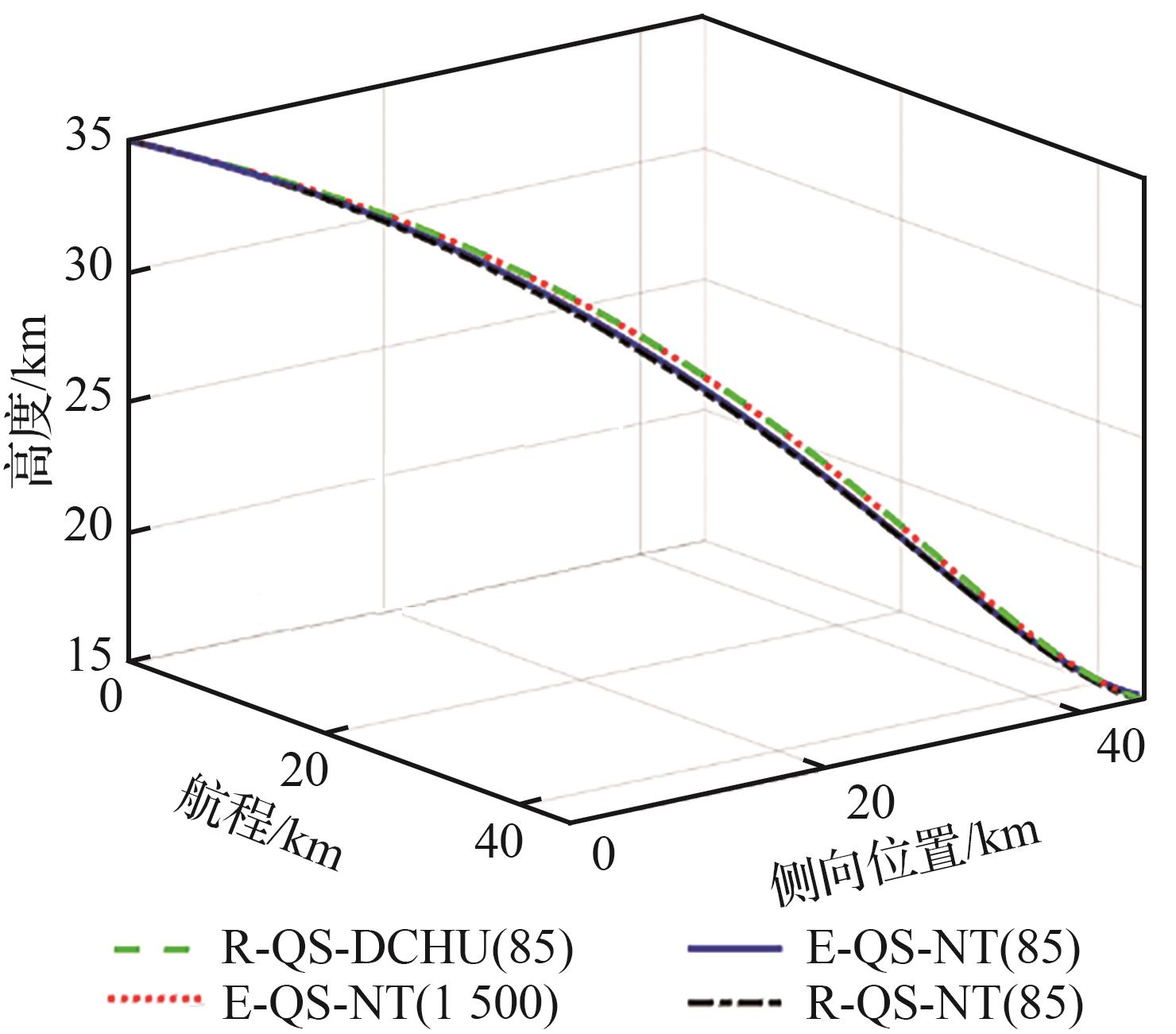
Table 4
Terminal control errors of trajectories obtained by R-QS-DCHU(85), E-QS-NT(1 500), E-QS-NT(85) and R-QS-NT(85) methods
| 仿真方法 | R-QS-DCHU(85) | E-QS-NT(1 500) | E-QS-NT(85) | R-QS-NT(85) |
|---|---|---|---|---|
| 航程/m | ||||
| 高度/m | ||||
| 侧向位置/m | ||||
| 速度/(m·s-1) | ||||
| 航迹角/( | ||||
| 航向角/( |
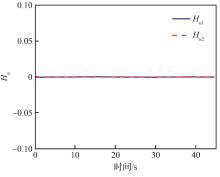
Fig.9
Curves of Hu with time
Fig.10
3D trajectories obtained by QS-DCHU-10, QS-DCHU-5, GPOPS and BPN methods
Table 5
Terminal control errors of trajectories obtained by QS-DCHU-10, QS-DCHU-5, GPOPS and BPN methods
| 终端状态 | QS-DCHU-10 | QS-DCHU-5 | GPOPS | BPN |
|---|---|---|---|---|
| 航程/m | ||||
| 高度/m | ||||
| 侧向位置/m | ||||
| 速度/(m·s-1) | ||||
| 航迹角/( | ||||
| 航向角/( |
Fig.11
Curves of normal overload with time obtained by the standard and damping Newton methods
Fig.12
Curves of lateral overload with time obtained by the standard and damping Newton methods
Fig.13
Monte Carlo simulations of 3D trajectories
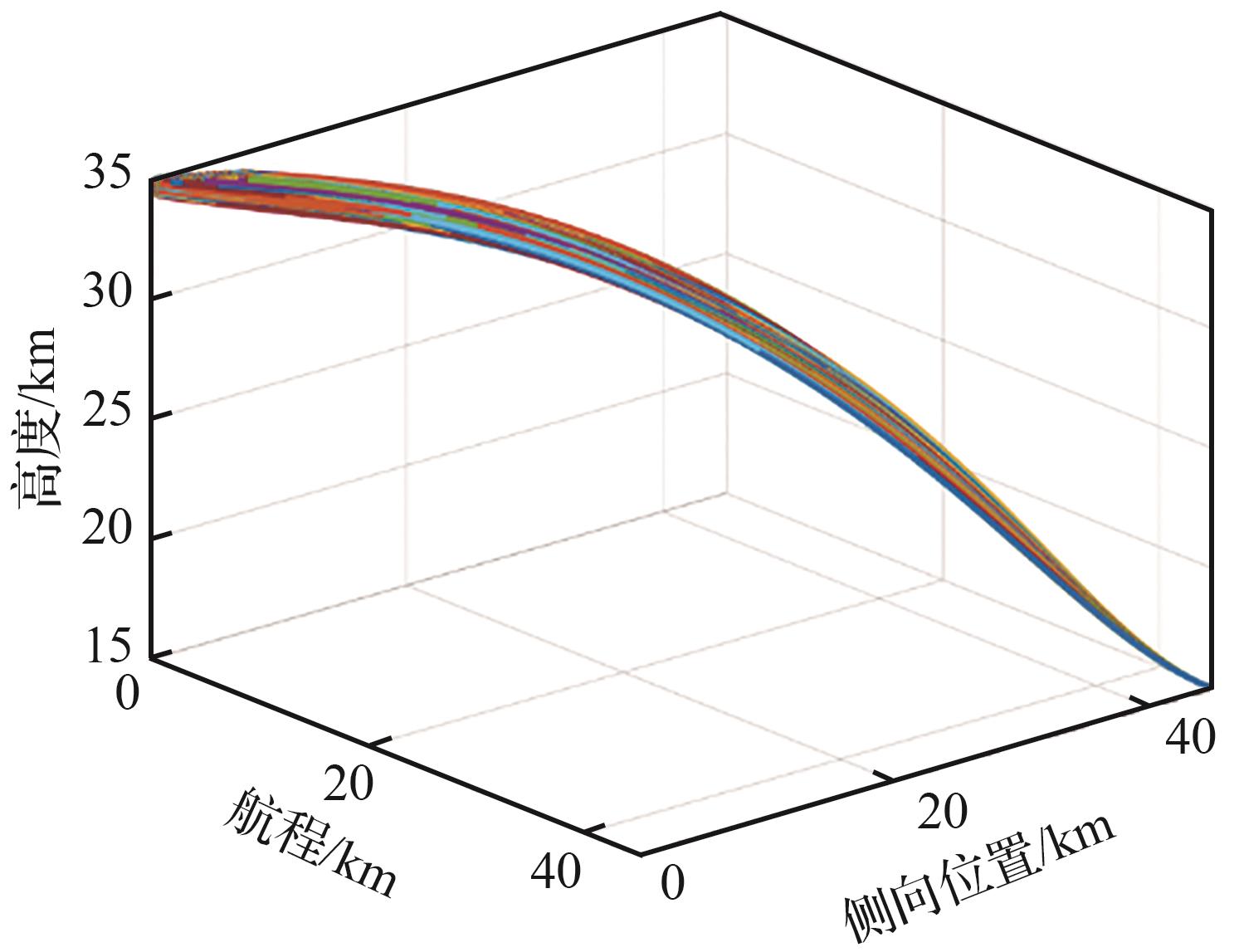
Table 6
Terminal control errors in MC
| 终端状态 | 均值 | 标准差 | 最大值 | 最小值 |
|---|---|---|---|---|
| 航程/m | ||||
| 高度/m | ||||
| 侧向位置/m | ||||
| 速度/(m·s-1) | ||||
| 航迹角/( | ||||
| 航向角/( |
Table 7
Desired terminal states, actual terminal states and their errors in the first stage
| 状态 | 期望终端状态 | 实际终端状态 | 状态误差 |
|---|---|---|---|
| 经度/( | |||
| 纬度/( | |||
| 地心距/km | |||
| 速度/(m·s-1) | |||
| 航迹角/( | |||
| 航向角/( |
Table 8
Current states, desired and actual terminal states in the second stage
| 状态 | 当前状态 | 期望终端状态 | 实际终端状态 |
|---|---|---|---|
| 经度/( | |||
| 纬度/( | |||
| 地心距/km | |||
| 速度/(m·s-1) | |||
| 航迹角/( | |||
| 航向角/( |
| [1] | GAO Y, CHIEN S. Review on space robotics: Toward top-level science through space exploration[J]. Science Robotics, 2017, 2(7): eaan5074. |
| [2] | 包为民. 可重复使用运载火箭技术发展综述[J]. 航空学报, 2023, 44(23): 629555. |
| BAO W M. A review of reusable launch vehicle technology development[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(23): 629555 (in Chinese). | |
| [3] | DING Y B, YUE X K, CHEN G S, et al. Review of control and guidance technology on hypersonic vehicle[J]. Chinese Journal of Aeronautics, 2022, 35(7): 1-18. |
| [4] | 穆凌霞, 王新民, 谢蓉, 等. 高超音速飞行器及其制导控制技术综述[J]. 哈尔滨工业大学学报, 2019, 51(3): 1-14. |
| MU L X, WANG X M, XIE R, et al. A survey of the hypersonic flight vehicle and its guidance and control technology[J]. Journal of Harbin Institute of Technology, 2019, 51(3): 1-14 (in Chinese). | |
| [5] | 李鹤宇, 王建斌, 张锐, 等. 具有时间和角度约束的欠驱动三维协同制导律[J]. 宇航学报, 2024, 45(10): 1633-1644. |
| LI H Y, WANG J B, ZHANG R, et al. Underactuated three-dimensional cooperative guidance law with time and angle constraints[J]. Journal of Astronautics, 2024, 45(10): 1633-1644 (in Chinese). | |
| [6] | 尹秋霖, 陈琦, 王中原, 等. 考虑时空协同的滑翔制导炮弹单炮多发快速弹道规划[J]. 兵工学报, 2024, 45(3): 798-809. |
| YIN Q L, CHEN Q, WANG Z Y, et al. Rapid trajectory planning for glide-guided projectiles in single-Gun multi-shot scenarios considering time-spatial coordination[J]. Acta Armamentarii, 2024, 45(3): 798-809 (in Chinese). | |
| [7] | 雍恩米, 陈磊, 唐国金. 飞行器轨迹优化数值方法综述[J]. 宇航学报, 2008, 29(2): 397-406. |
| YONG E M, CHEN L, TANG G J. A survey of numerical methods for trajectory optimization of spacecraft[J]. Journal of Astronautics, 2008, 29(2): 397-406 (in Chinese). | |
| [8] | 崔平远, 龙嘉腾, 朱圣英, 等. 行星着陆轨迹优化技术研究进展[J]. 宇航学报, 2021, 42(6): 677-686. |
| CUI P Y, LONG J T, ZHU S Y, et al. Research progress of planetary landing trajectory optimization techniques[J]. Journal of Astronautics, 2021, 42(6): 677-686 (in Chinese). | |
| [9] | 武迪, 郭祥, 蒋方华, 等. 连续小推力轨迹优化间接法研究进展综述[J]. 宇航学报, 2024, 45(7): 995-1007. |
| WU D, GUO X, JIANG F H, et al. Progress of indirect method for continuous low-thrust trajectory optimization[J]. Journal of Astronautics, 2024, 45(7): 995-1007 (in Chinese). | |
| [10] | SHIRAZI A, CEBERIO J, LOZANO J A. Spacecraft trajectory optimization: A review of models, objectives, approaches and solutions[J]. Progress in Aerospace Sciences, 2018, 102: 76-98. |
| [11] | CHAI R Q, SAVVARIS A, TSOURDOS A, et al. A review of optimization techniques in spacecraft flight trajectory design[J]. Progress in Aerospace Sciences, 2019, 109: 100543. |
| [12] | 闫循良, 王培臣, 王舒眉, 等. 基于混沌多项式的RBCC飞行器上升段鲁棒轨迹快速优化[J]. 航空学报, 2023, 44(21): 528349. |
| YAN X L, WANG P C, WANG S M, et al. Rapid robust trajectory optimization for RBCC vehicle ascent based on polynomial chaos[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(21): 528349 (in Chinese). | |
| [13] | WIJAYATUNGA M C, ARMELLIN R, PIROVANO L. Exploiting scaling constants to facilitate the convergence of indirect trajectory optimization methods[J]. Journal of Guidance, Control, and Dynamics, 2023, 46(5): 958-969. |
| [14] | SARANATHAN H, GRANT M J. Incorporation of rigid body dynamics into indirect hypersonic trajectory optimization[J]. Journal of Spacecraft and Rockets, 2023, 61(2): 393-406. |
| [15] | 王有盛, 孙立国, 魏金鹏, 等. 基于改进鸡群-Gauss伪谱法的组合动力飞机爬升轨迹优化方法[J]. 航空学报, 2025, 46(2): 230737. |
| WANG Y S, SUN L G, WEI J P, et al. Optimization of climb trajectory of combined-cycle engine powered aircraft based on improved CSO-Gauss pseudospectral method[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(2): 230737 (in Chinese). | |
| [16] | DARBY C L, HAGER W W, RAO A V. Direct trajectory optimization using a variable low-order adaptive pseudospectral method[J]. Journal of Spacecraft and Rockets, 2011, 48(3): 433-445. |
| [17] | DIEDAM H, SAGER S. Global optimal control with the direct multiple shooting method[J]. Optimal Control Applications and Methods, 2018, 39(2): 449-470. |
| [18] | PATTERSON M A, RAO A V. GPOPS-Ⅱ: A MATLAB software for solving multiple-phase optimal control problems using hp-adaptive Gaussian quadrature collocation methods and sparse nonlinear programming[J]. ACM Transactions on Mathematical Software (TOMS), 2014, 41(1): 1-37. |
| [19] | ROSS I M. Enhancements to the DIDO optimal control toolbox[J]. arXiv preprint: 2004.13112; 2020. |
| [20] | LU P. Introducing computational guidance and control[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(2): 193. |
| [21] | PAN B F, MA Y Y, YAN R. Newton-type methods in computational guidance[J]. Journal of Guidance, Control, and Dynamics, 2018, 42(2): 377-383. |
| [22] | 董哲, 刘凯, 李旦伟, 等. 考虑动态控制分配的空天飞行器再入姿态复合控制设计[J]. 宇航学报, 2021, 42(6): 749-756. |
| DONG Z, LIU K, LI D W, et al. A dynamic control allocation approach for reentry compound attitude control design of aerospace vehicle[J]. Journal of Astronautics, 2021, 42(6): 749-756 (in Chinese). | |
| [23] | MALYUTA D, REYNOLDS T P, SZMUK M, et al. Convex optimization for trajectory generation: A tutorial on generating dynamically feasible trajectories reliably and efficiently[J]. IEEE Control Systems Magazine, 2022, 42(5): 40-113. |
| [24] | MALYUTA D, YU Y, ELANGO P, et al. Advances in trajectory optimization for space vehicle control[J]. Annual Reviews in Control, 2021, 52: 282-315. |
| [25] | 刘哲, 陆浩然, 郑伟, 等. 多滑翔飞行器时间协同轨迹快速规划[J]. 航空学报, 2021, 42(11): 524497. |
| LIU Z, LU H R, ZHENG W, et al. Rapid time-coordination trajectory planning method for multi-glide vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(11): 524497 (in Chinese). | |
| [26] | 刁尹, 张智, 彭越, 等. 火箭着陆段能量管理与轨迹优化技术[J]. 航空学报, 2024, 45(15): 229634. |
| DIAO Y, ZHANG Z, PENG Y, et al. Energy management and trajectory optimization technology for rocket landing[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 229634 (in Chinese). | |
| [27] | KUMAGAI N, OGURI K. Adaptive-mesh sequential convex programming for space trajectory optimization[J]. Journal of Guidance, Control, and Dynamics, 2024, 47(10): 2213-2220. |
| [28] | LIU X, LI S, XIN M. Pseudospectral convex optimization based model predictive static programming for constrained guidance[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(3): 2232-2244. |
| [29] | PADHI R, BANERJEE A, MATHAVARAJ S, et al. Computational guidance using model predictive static programming for challenging space missions: An introductory tutorial with example scenarios[J]. IEEE Control Systems Magazine, 2024, 44(2): 55-80. |
| [30] | MA Y Y, PAN B F. Parallel-structured Newton-type guidance by using modified Chebyshev-Picard iteration[J]. Journal of Spacecraft and Rockets, 2020, 58(3): 729-740. |
| [31] | 陈顺毅, 徐小平, 刘双喜, 等. 面向时间协同的高超声速滑翔飞行器集群再入轨迹规划[J/OL]. 国防科技大学学报, (2025-01-01)[2025-01-03]. . |
| CHEN S Y, XU X P, LIU S X, et al. Time-coordinated reentry trajectory planning of hypersonic gliding vehicle cluster[J/OL]. Journal of National University of Defense Technology, (2025-01-01)[2025-01-03]. (in Chinese). | |
| [32] | 廖腾, 刘燕斌, 陈柏屹, 等. 高超声速飞行器主动增阻的时间一致协同方法[J]. 宇航学报, 2024, 45(10): 1656-1665. |
| LIAO T, LIU Y B, CHEN B Y, et al. Time consensus method for active drag increment of hypersonic flight vehicle[J]. Journal of Astronautics, 2024, 45(10): 1656-1665 (in Chinese). | |
| [33] | WANG Y Z, HAN Z G, LU C. Improved time-optimal static programming algorithm for hypersonic vehicle[J]. International Journal of Control, 2024, 97(5): 999-1013. |
| [34] | LU P, DOMAN D B, SCHIERMAN J D. Adaptive terminal guidance for hypervelocity impact in specified direction[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(2): 269-278. |
| [35] | WANG Y Z, DAI H H. Secure model predictive static programming with initial value generator for online computational guidance of near-space vehicles[J]. Aerospace Science and Technology, 2025, 156: 109768. |
| [36] | WANG J W, ZHANG R. Terminal guidance for a hypersonic vehicle with impact time control[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(8): 1790-1798. |
| [37] | MONDAL S, PADHI R. Angle-constrained terminal guidance using quasi-spectral model predictive static programming[J]. Journal of Guidance, Control, and Dynamics, 2017, 41(3): 783-791. |
| [38] | 周聪, 闫晓东, 唐硕, 等. 大气层内模型预测静态规划拦截中制导[J]. 航空学报, 2021, 42(11): 524912. |
| ZHOU C, YAN X D, TANG S, et al. Midcourse guidance for endo-atmospheric interception based on model predictive static programming[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(11): 524912 (in Chinese). | |
| [39] | DWIVEDI P N, BHATTACHARYA A, PADHI R. Suboptimal midcourse guidance of interceptors for high-speed targets with alignment angle constraint[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(3): 860-877. |
| [40] | ZHOU C, YAN X D, TANG S. Generalized quasi-spectral model predictive static programming method using Gaussian quadrature collocation[J]. Aerospace Science and Technology, 2020, 106: 106134. |
| [41] | 马洋洋. 运载火箭数值优化自主制导方法研究[D]. 西安: 西北工业大学, 2023: 46-48. |
| MA Y Y. Research on numerical optimization-based autonomous guidance method for launch vehicles[D]. Xi’an: Northwestern Polytechnical University, 2023: 46-48 (in Chinese). | |
| [42] | POLYAK B, TREMBA A. New versions of Newton method: Step-size choice, convergence domain and under-determined equations[J]. Optimization Methods and Software, 2020, 35(6): 1272-1303. |
| [43] | ZHANG F, HUANG P F. Fuzzy-based adaptive super-twisting sliding-mode control for a maneuverable tethered space net robot[J]. IEEE Transactions on Fuzzy Systems, 2021, 29(7): 1739-1749. |
| [44] | 张永华, 王铮, 王时雨, 等. 基于无迹模型预测静态规划的可回收火箭着陆段鲁棒制导方法[J/OL]. 北京航空航天大学学报, (2024-09-14)[2025-01-03]. . |
| ZHANG Y H, WANG Z, WANG S Y, et al. Robust guidance method of recoverable rocket landing phase based on unscented model predictive static programming[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, (2024-09-14)[2025-01-03]. (in Chinese). | |
| [45] | LAN J, LI J. Newton-Kantorovich/Radau pseudospectral solution to rigid spacecraft time-optimal three-axis reorientation[J]. Advances in Space Research, 2020, 65(11): 2662-2673. |
| [1] | Naigang CUI, Guoxin QU, Xinhai MA, Shihao XU, Changzhu WEI. Adaptive prescribed-time/performance control for plane-symmetric aircraft in boost phase [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531470-531470. |
| [2] | Wei DONG, Xin YI, Houjun ZHANG, Chunyan WANG, Fang DENG. Design of guidance law with precise impact angle and time control [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330787-330787. |
| [3] | Zibo LIU, Ran ZHANG, Wenchao XUE, Huifeng LI. Active disturbance rejection control for load relief of launch vehicles considering elastic effects [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 330319-330319. |
| [4] | Yin DIAO, Zhi ZHANG, Yue PENG, Yang LI, Borong ZHANG, Zhiguo ZHANG. Energy management and trajectory optimization technology for rocket landing [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 229634-229634. |
| [5] | . Energy management and trajectory optimization technology for rocket landing [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [6] | Xinglun CHEN, Ran ZHANG, Xiaoyan ZHANG. Combined disturbance compensation guidance for powered descent in atmosphere [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(23): 628465-628465. |
| [7] | Yiting TAN, Wuxing JING, Changsheng GAO, Ruoming AN. Multiple constrained analytical capture region for hypersonic maneuvering target interception [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(22): 328436-328436. |
| [8] | Leliang REN, Yong XIAN, Shaopeng LI, Gang LEI, Wei WU, Bing LI. A neural network model for impact point prediction of ballistic missile based on improved second-order optimizer with parallel learning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(14): 327964-327964. |
| [9] | . Combined disturbance compensation guidance for powered descent in the atmosphere [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 0, (): 0-0. |
| [10] | Shihao XU, Yingzi GUAN, Jialun PU, Changzhu WEI. Predefined-time sliding mode control for VTHL launch vehicle in reentry phase [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 326857-326857. |
| [11] | Zhiyong CAI, Hanyue SHI, Hongjun ZHAO, Tianqi LI, Xiyu WANG, Yaoming ZHOU. Construction and simulation of amphibious aircraft fire⁃fighting flight simulation system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(6): 227036-227036. |
| [12] | FAN Yida, MAO Yuming, SHU Zhongping, WANG Jifei, ZHANG Yangyang, YU Zhefeng. Hybrid fluid-to-solid loads transformation based on pressure-interpolation/force-equivalence for launch vehicles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(3): 225053-225053. |
| [13] | WANG Jiawei, ZHANG Ran, HAO Zeming, LI Huifeng. Real-time trajectory optimization for hypersonic vehicles with Proximal-Newton-Kantorovich convex programming [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(11): 624051-624051. |
| [14] | BAI Zhihui, LI Kebo, SU Wenshan, CHEN Lei. Capture region of RTPN guidance law against arbitrarily maneuvering targets [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(8): 323947-323947. |
| [15] | DONG Xiaofei, REN Zhang, CHI Qingxi, LI Qingdong. Distributed cooperative guidance for maneuvering targets with directed conmunication topologies [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723762-723762. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341