Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (15): 331480.doi: 10.7527/S1000-6893.2024.31480
• Electronics and Electrical Engineering and Control • Previous Articles
Qi SONG, Jialiang ZUO( ), Ao WU, Rennong YANG, Ying WANG, Leyan LI
), Ao WU, Rennong YANG, Ying WANG, Leyan LI
Received:2024-11-01
Revised:2024-12-02
Accepted:2024-12-24
Online:2025-02-06
Published:2025-01-07
Contact:
Jialiang ZUO
E-mail:hudyuan@163.com
CLC Number:
Qi SONG, Jialiang ZUO, Ao WU, Rennong YANG, Ying WANG, Leyan LI. Collaborative mission schedule management method for air battle management[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331480.

Fig.1
Multi-task coordinated air combat scene diagram
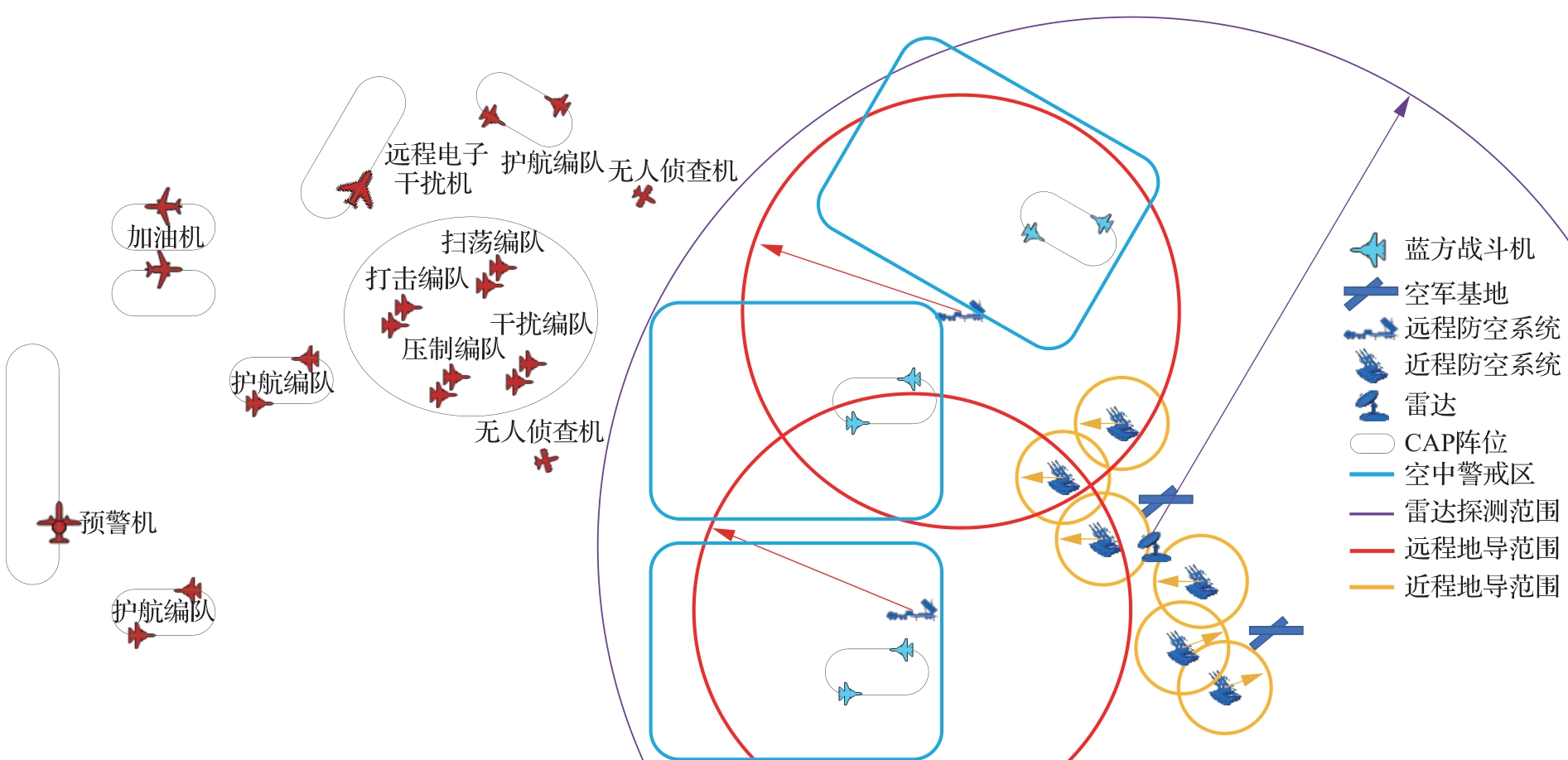
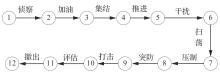
Fig.2
Overall mission schedule of Offensive Counterair
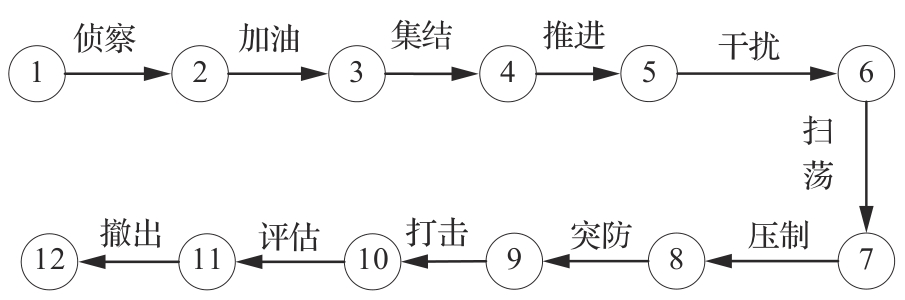

Fig.3
Hierarchical network planning structure
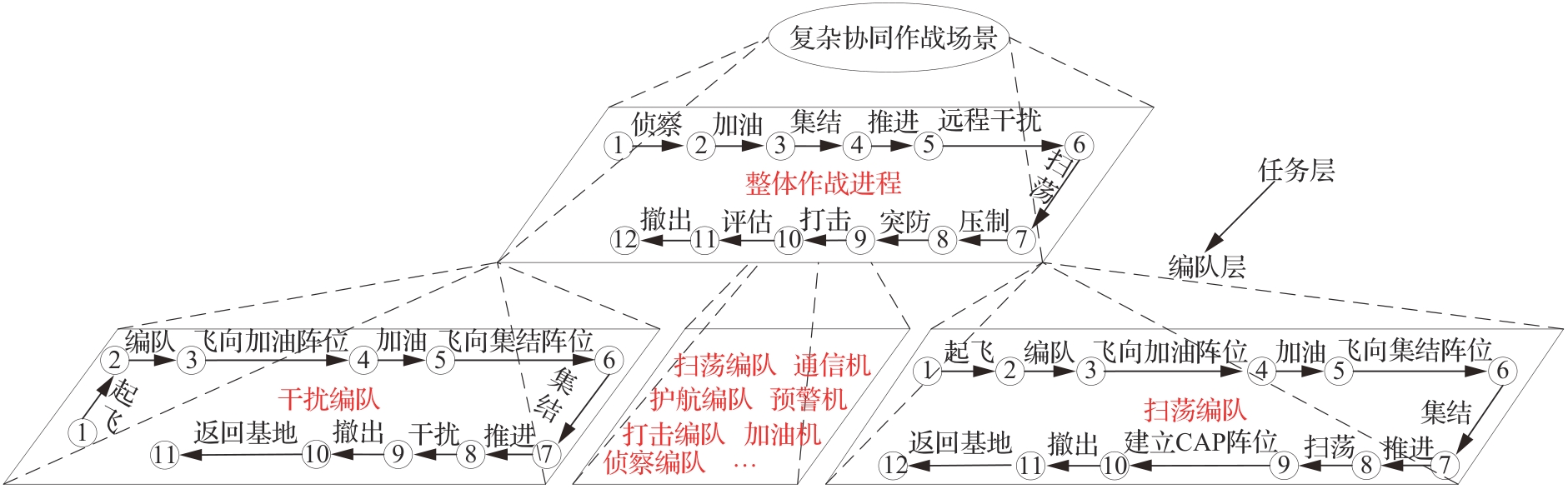
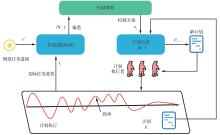
Fig.4
mission schedule control diagram
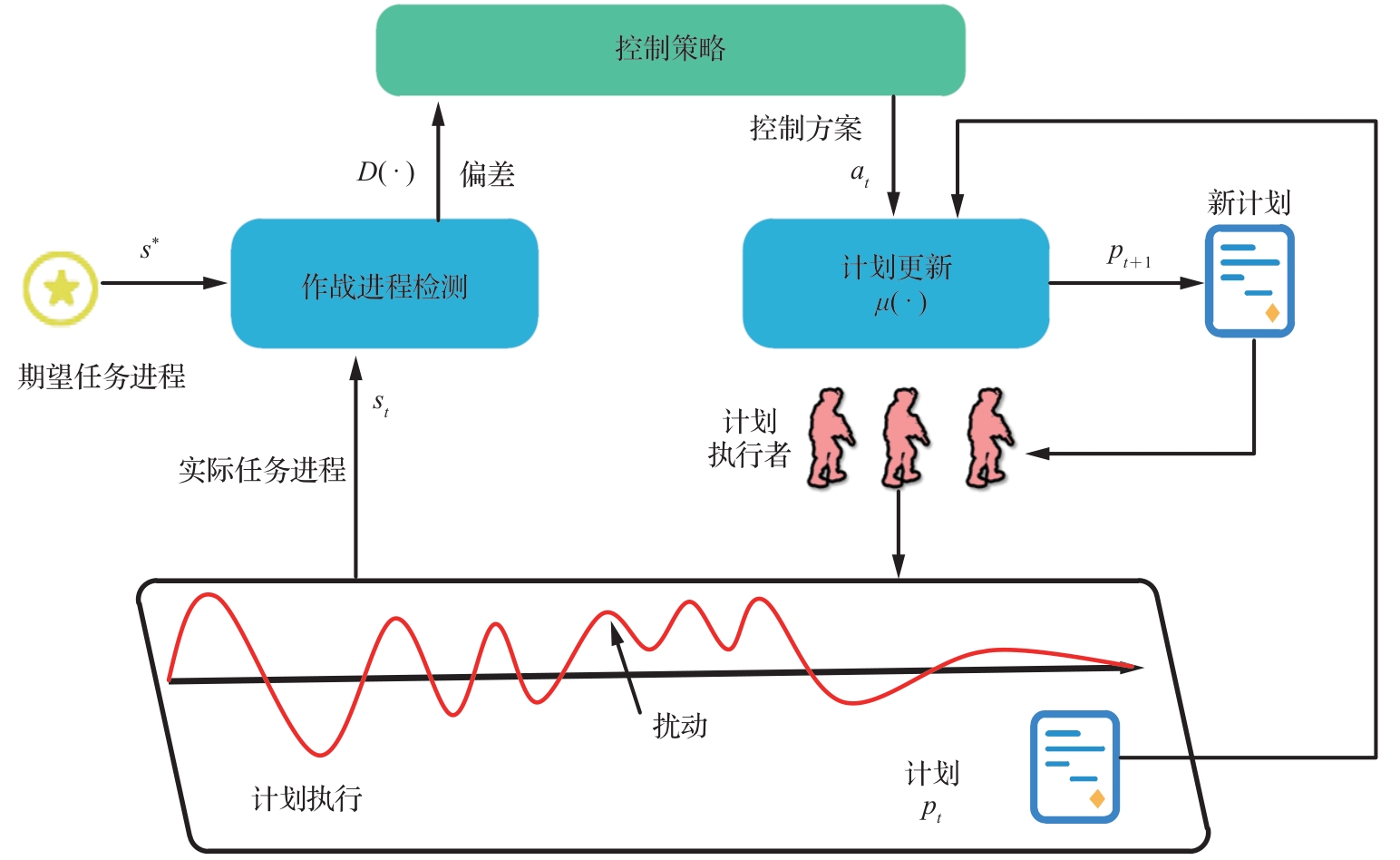
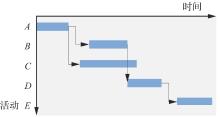
Fig.5
Gantt chart
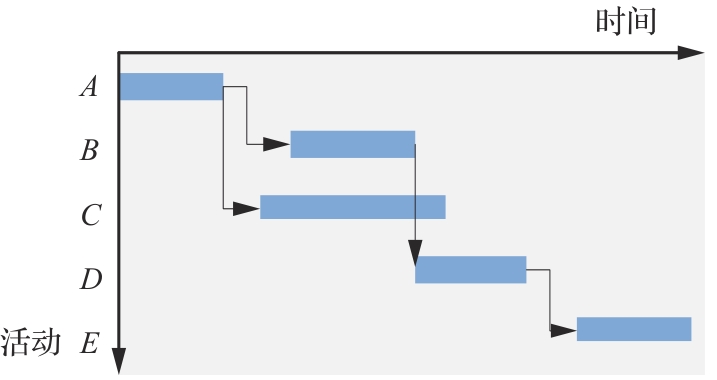
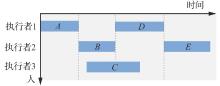
Fig.6
Load chart
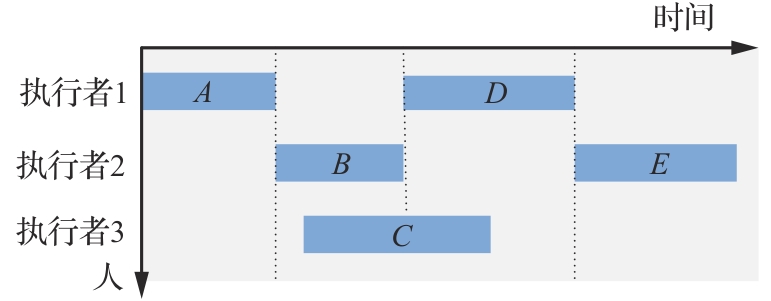

Fig.7
Activity on arrow
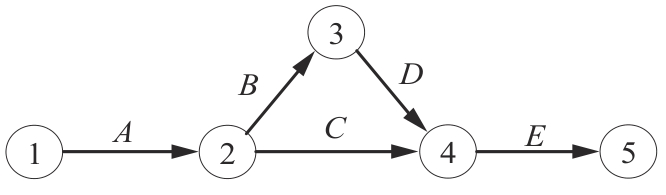
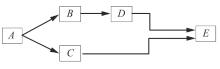
Fig.8
Activity on node
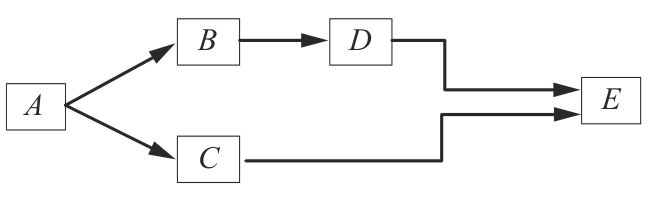
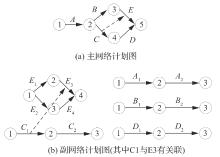
Fig.9
Group network planning
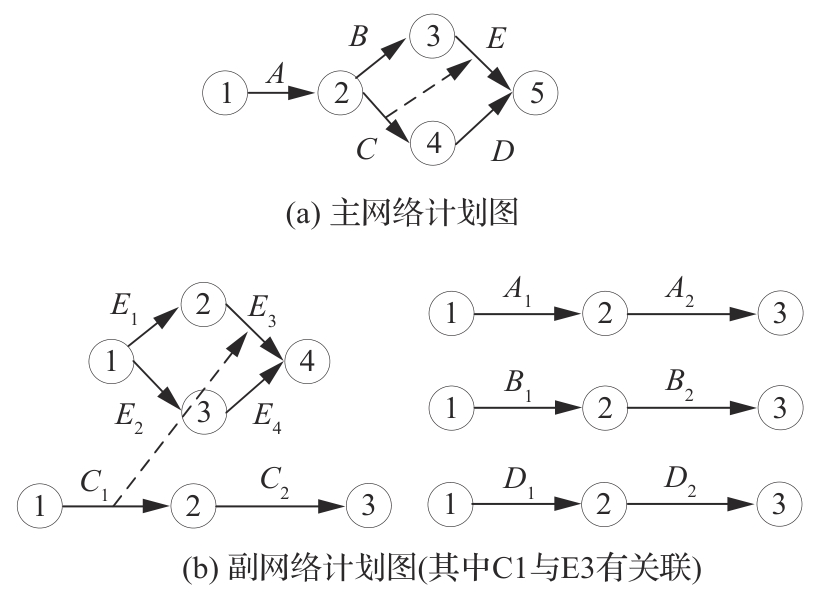
Table 1
Methods for operational coordination relationship
| 需求 | 描述 | 模型处理方法 |
|---|---|---|
| 开始-开始 | 工作Ai 开始工作Bj 才能开始 | 将工作Ai 的所有紧前工作(Ai-1等)均添加至工作Bj 的紧前工作中 |
| 开始-结束 | 工作Ai 开始工作Bj 才能结束 | 将工作Ai 的所有紧前工作(Ai-1等)均添加至Bj+1的紧前工作中 |
| 结束-开始 | 工作Ai 结束工作Bj 才能开始 | 双代号网络计划的紧前-紧后关系 |
| 结束-结束 | 工作Ai 结束工作Bj 才能结束 | 将工作Ai 添加至Bj+1的紧前工作中,且模型将作战单元的松弛时间自动视为原地等待 |
| 任意制定计划时间 | 计划时间不等于最早或最晚时间 | 在全局开始节点S及编队开始节点之间设立带时长的虚拟工作节点 |

Fig.10
Timeline-based Activity On Arrow group network
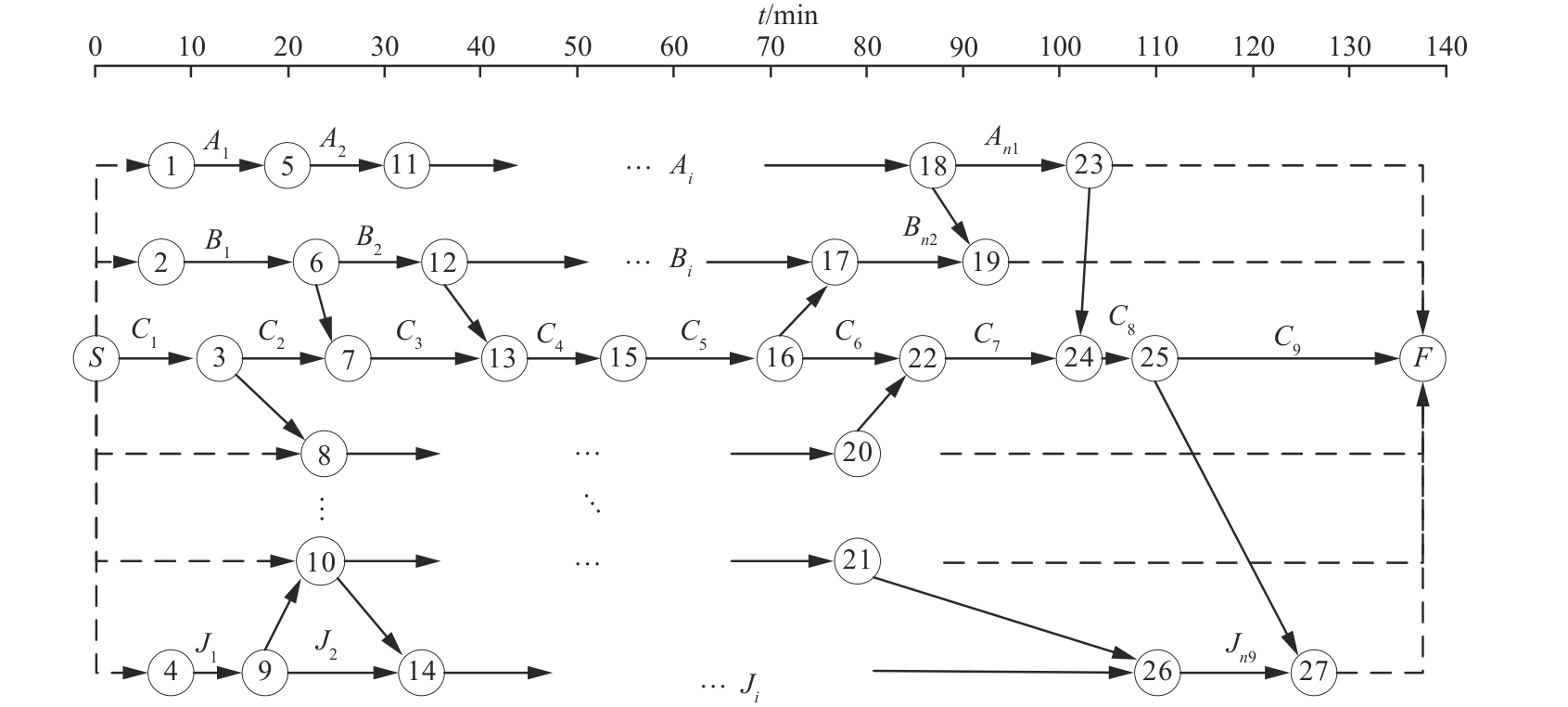
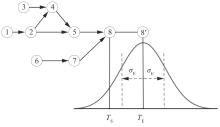
Fig.11
Program evaluation and research technique diagram
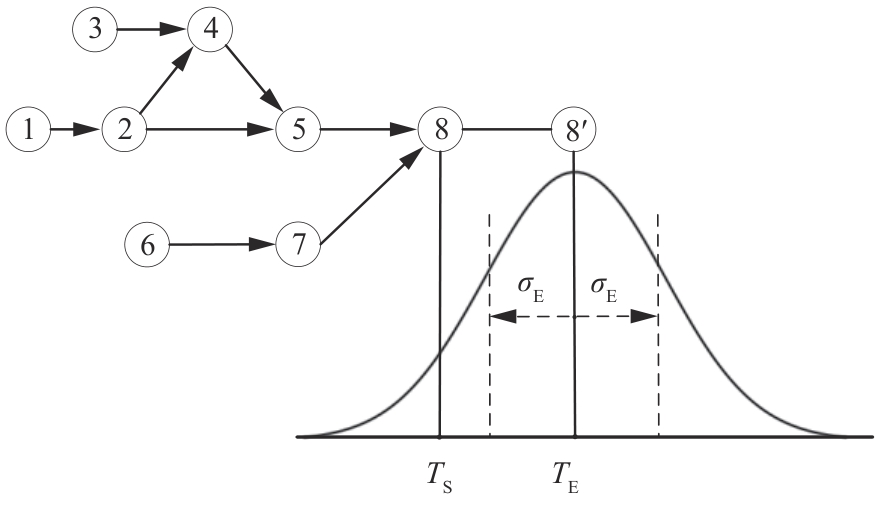
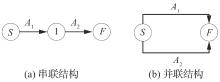
Fig.12
Work dependency structure diagram
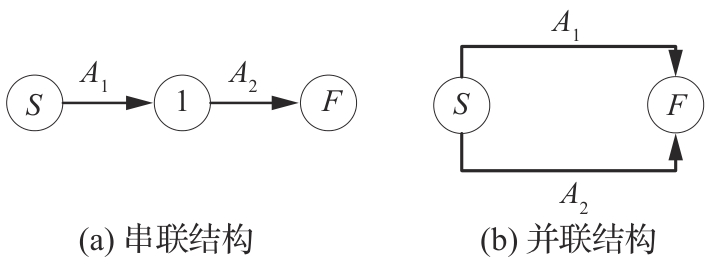
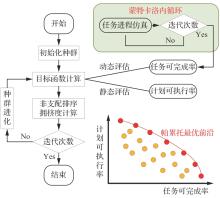
Fig.13
Flow chart of multi-objective optimization solution
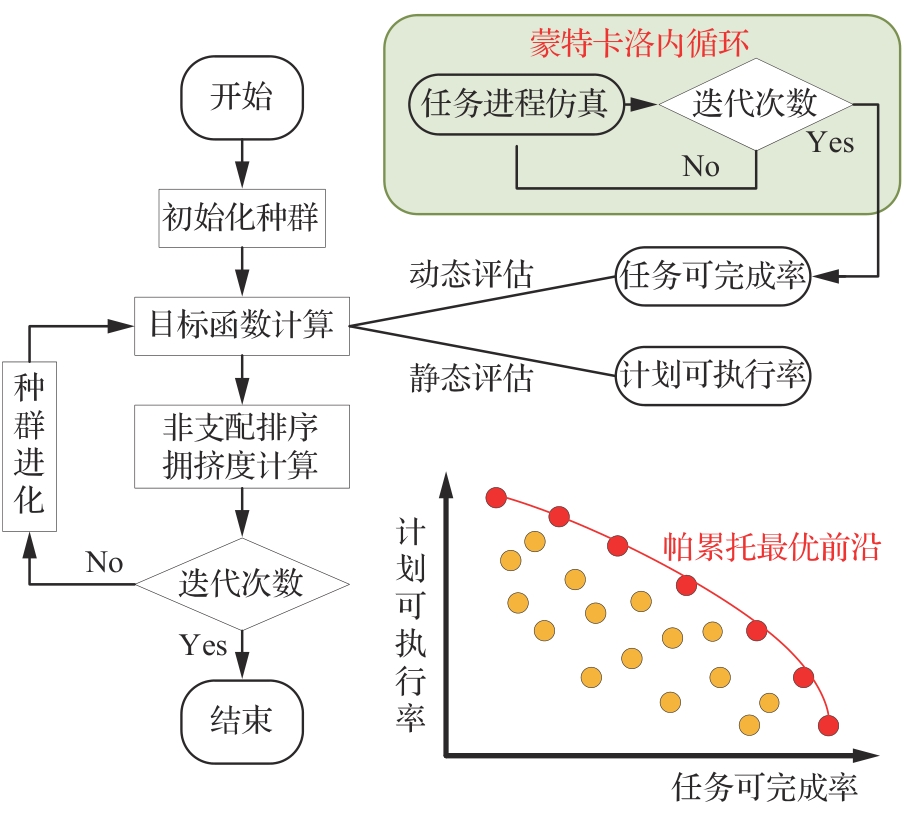

Fig.14
Construction method of mission schedule control system
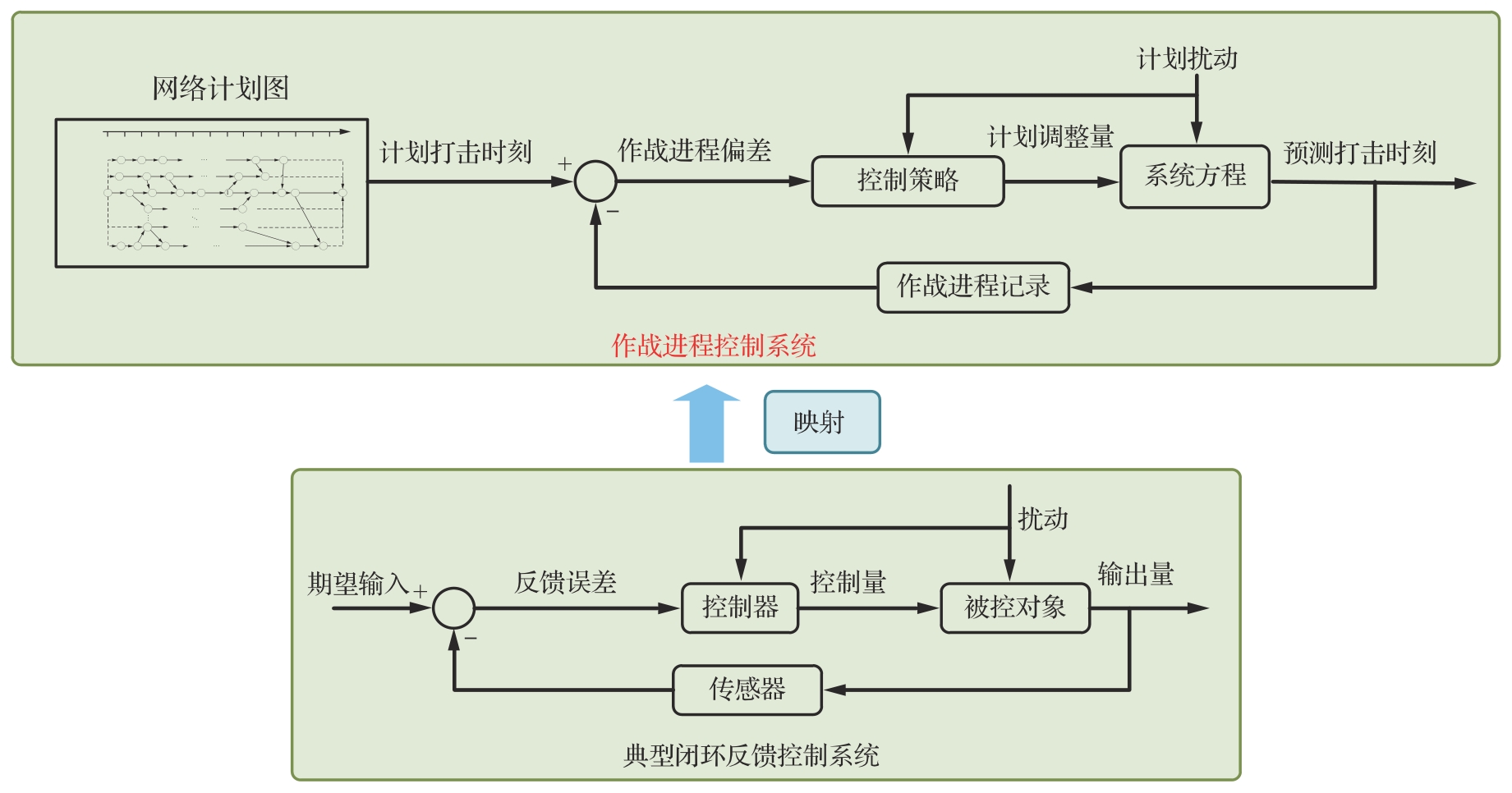

Fig.15
Critical path adjustment in response todisturbances
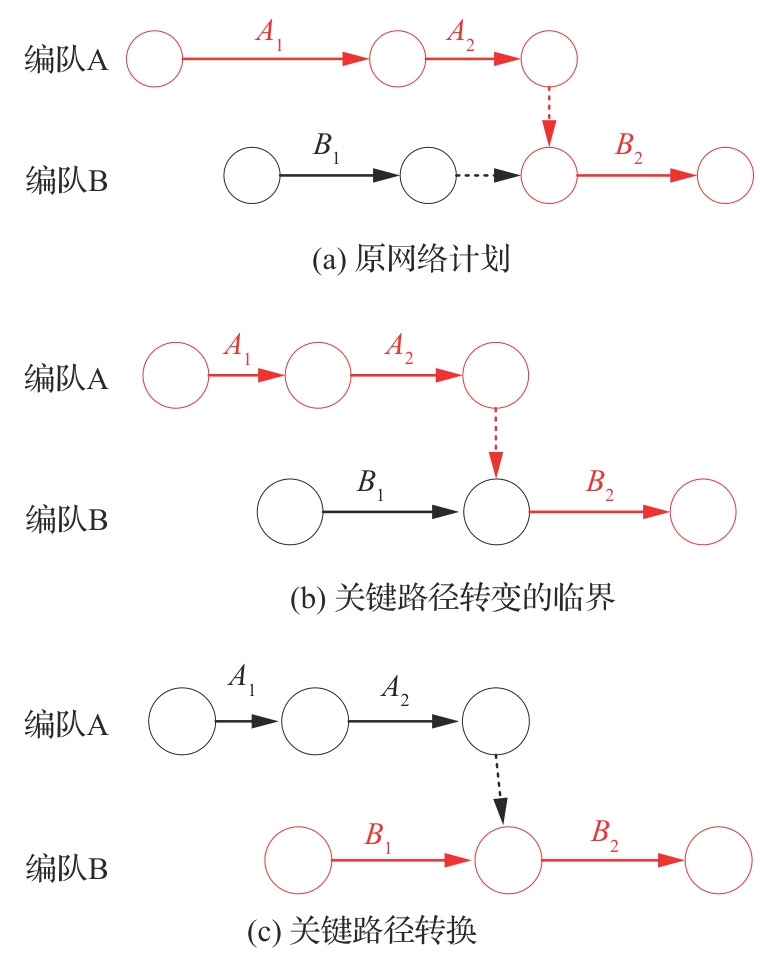
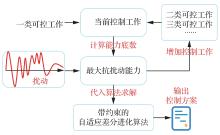
Fig.16
Flowchart for solving control variables
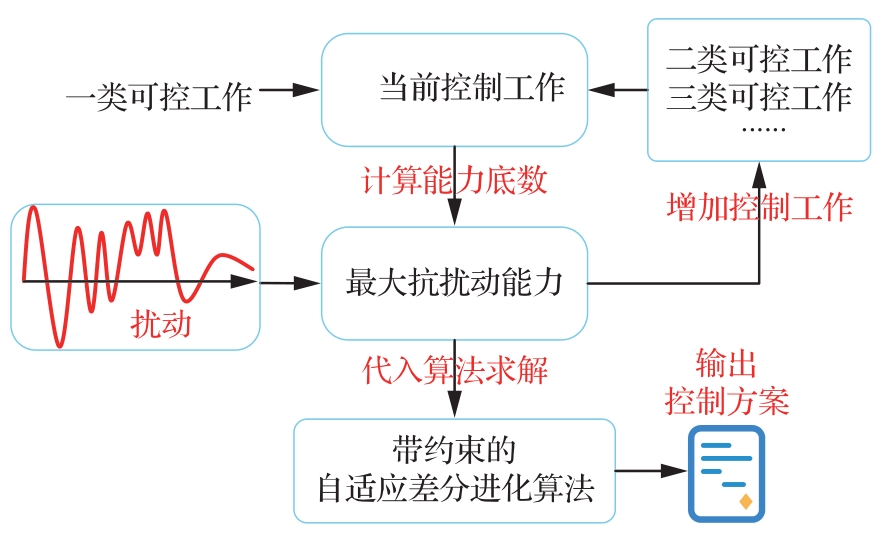
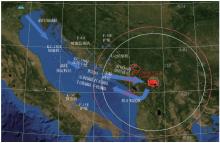
Fig.17
Schematic diagram of the blue side
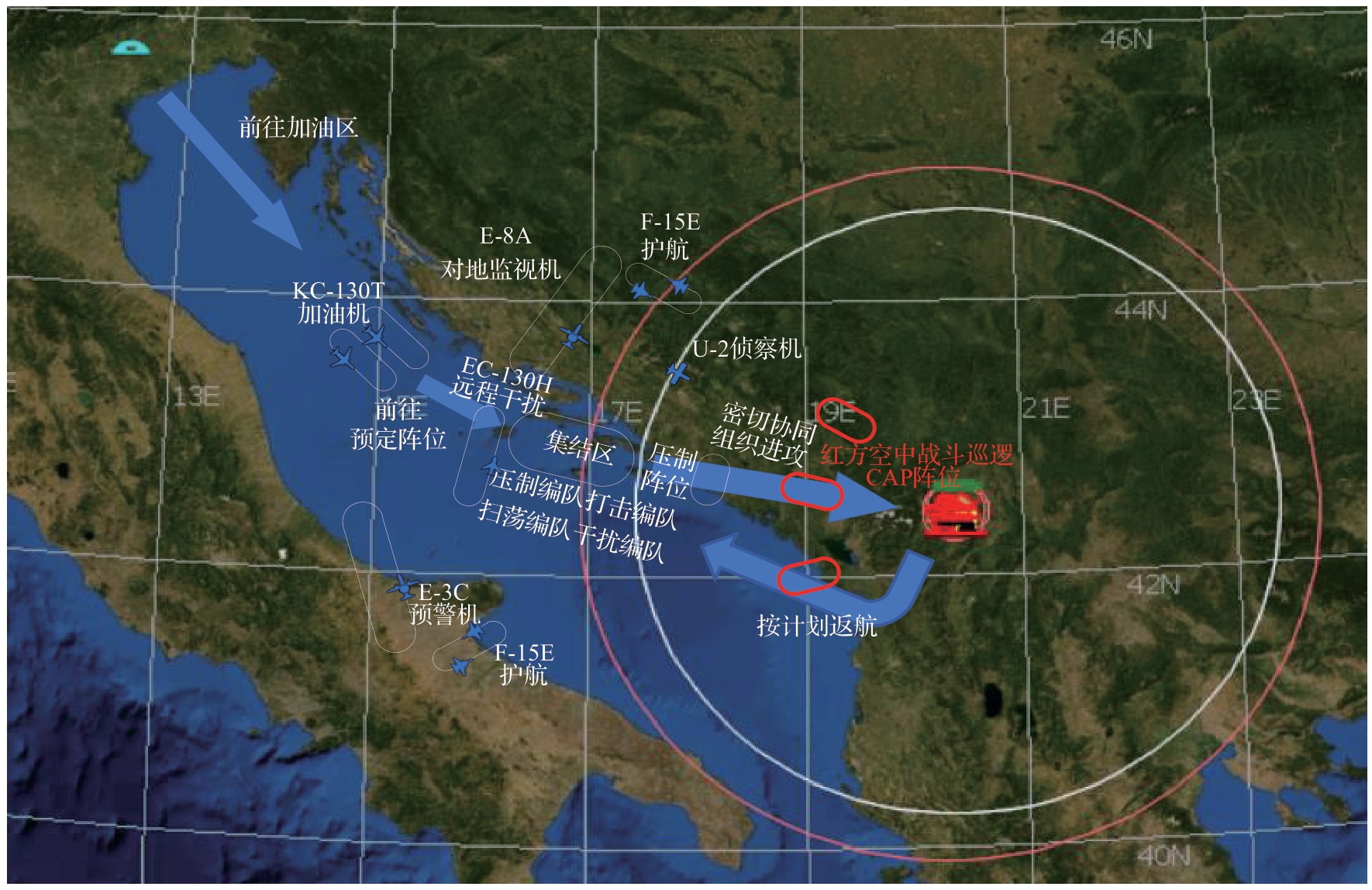
Table 2
Force data of scenario
| 阵营 | 装备类型 | 数量 | 挂载方案/装备性能 | 兵力统计 |
|---|---|---|---|---|
| 蓝军 | E-3C | 1 | 空中预警,对空探测范围648 km | 共32架飞机 |
| KC-130T | 2 | 带中心线加油软管,加油速率600 kg/min | ||
| 狂风IDS(压制) | 4 | 挂载:2×AGM-88B,射程129.64 km;2×1 500 L副油箱 | ||
| 狂风IDS(打击) | 4 | 挂载:2×MW-1反跑道布撒器,射程1.85 km;2×1 500 L副油箱 | ||
| F-15E(护航) | 8 | 挂载:6×AIM-120A,射程74.08 km;2×AIM-9M,射程18.52 km; 2×2 271 L副油箱;2×2 736.55 L副油箱 | ||
| F-15E(打击) | 4 | 挂载:4×GBU-24A,射程14.82 km;2×AIM-120A,射程74.08 km; 2×AIM-9M,射程18.52 km;2×2 271 L副油箱;2×2 736.55 L副油箱 | ||
| EC-130H | 1 | 进攻型电子干扰ECM | ||
| EF-111A | 2 | 1×AN/ALQ-131干扰吊舱 | ||
| U-2S | 1 | 机载侧视雷达/红外 | ||
| E-8A | 1 | 联合监视目标雷达攻击系统,对地探测范围370.4 km | ||
| 红军 | Mig-21 | 12 | 挂载:4×AA-8,射程9.26 km | 12架飞机 1套中远程地导 2套近程地导 2套高射炮 1个雷达 |
| 萨姆-6 | 2 | 射程:24.08 km;射高10.7 km | ||
| P-19雷达 | 1 | 对空探测范围250 km | ||
| 萨姆-5 | 1 | 射程:287.06 km;射高3.96 km | ||
| 博福斯高射炮 | 2 | 射程2.2 km |
Table 3
Equipment performance parameters of scenario
| 飞机 | 作战飞行速度/ (km·h-1) | 耗油率/ (kg·min-1) | 总油量/kg | 飞行高度/km | 盘旋飞行速度/ (km·h-1) | 耗油率/ (kg·min-1) |
|---|---|---|---|---|---|---|
| F-15E(护航) | 1 018.60 | 107.20 | 13 972 | 7.3~10 | 648.20 | 49.00 |
| F-15E(打击) | 1 018.60 | 136.80 | 13 972 | 7.3~10 | 648.20 | 62.50 |
| 狂风IDS(压制) | 1 018.60 | 63.50 | 7 060 | 7.3~10 | 648.20 | 30.40 |
| 狂风IDS(打击) | 888.96 | 92.70 | 7 060 | 7.3~10 | 648.20 | 74.10 |
| EF-111A | 1 018.60 | 81.64 | 15 200 | 7.3~10 | 648.20 | 39.10 |
| EC-130 | 537.08 | 29.37 | 28 540 | 7.3~10 | 537.08 | 29.37 |
| KC-130T | 537.08 | 29.37 | 28 540 | 7.3~10 | 537.08 | 29.37 |
| E-8A | 592.64 | 111.05 | 73 800 | 7.3~10 | 592.64 | 111.05 |
| E-3C | 592.64 | 105.80 | 70 310 | 7.3~10 | 592.64 | 105.80 |
| U-2S | 759.32 | 16.66 | 8 935 | 25 | 759.32 | 16.66 |
Table 4
Formation task list based on Work Breakdown Structure
| 任务名称 | 任务 代号 | 任务执行单元 | 任务估计 时长/min | 时长 方差 | 任务可控性 | 最短任务 时长/min | 紧前任务 |
|---|---|---|---|---|---|---|---|
| 侦察机滑跑 | A1 | U-2S | 2.0 | 0.05 | 0 | 2.0 | START |
| 侦察机起飞 | A2 | U-2S | 0.5 | 0.02 | 0 | 0.5 | A1 |
| 侦察机飞向侦察阵位 | A3 | U-2S | 39.3 | 0 | 1 | 31.4 | A2 |
| 侦察机执行侦察任务 | A4 | U-2S | 50.0 | 0 | 0 | 50.0 | A3 |
| 侦察机返航 | A5 | U-2S | 39.3 | 0 | 1 | 31.4 | A4/J9 |
| 侦察机着陆 | A6 | U-2S | 4.0 | 0.10 | 0 | 4.0 | A5/C6 |
| 护航1编队滑跑 | B1 | F-15E(1-2) | 2.0 | 0.05 | 0 | 2.0 | START |
| 护航1编队起飞 | B2 | F-15E(1-2) | 0.5 | 0.02 | 0 | 0.5 | B1/C2 |
| 护航1编队飞向巡逻阵位 | B3 | F-15E(1-2) | 27.4 | 0 | 1 | 21.9 | B2 |
| 护航1编队进行护航 | B4 | F-15E(1-2) | 90.0 | 0 | 0 | 90.0 | B3 |
| 护航1编队返航 | B5 | F-15E(1-2) | 27.4 | 0 | 1 | 21.9 | B4/J9 |
| 护航1编队着陆 | B6 | F-15E(1-2) | 4.0 | 0.10 | 0 | 4.0 | B5 |
| 护航2编队滑跑 | C1 | F-15E(3-4) | 2.0 | 0.05 | 0 | 2.0 | START |
| 护航2编队起飞 | C2 | F-15E(3-4) | 0.5 | 0.02 | 0 | 0.5 | C1 |
| 护航2编队飞向巡逻阵位 | C3 | F-15E(3-4) | 34.8 | 0 | 1 | 27.8 | C2 |
| 护航2编队进行护航 | C4 | F-15E(3-4) | 90.0 | 0 | 0 | 90.0 | C3 |
| 护航2编队返航 | C5 | F-15E(3-4) | 34.8 | 0 | 1 | 27.8 | C4/J9 |
| 护航2编队着陆 | C6 | F-15E(3-4) | 4.0 | 0.10 | 0 | 4.0 | C5/B6 |
| 扫荡编队滑跑 | D1 | F-15E(5-8) | 2.0 | 0.05 | 0 | 2.0 | START |
| 扫荡编队起飞 | D2 | F-15E(5-8) | 0.5 | 0.02 | 0 | 0.5 | D1/B2 |
| 扫荡编队飞向集结阵位 | D3 | F-15E(5-8) | 28.9 | 0 | 1 | 23.0 | D2 |
| 扫荡编队集结 | D4 | F-15E(5-8) | 2.0 | 0.10 | 0 | 2.0 | D3/I5/J5/K5/L3 |
| 扫荡编队飞向扫荡阵位 | D5 | F-15E(5-8) | 6.1 | 0 | 1 | 4.8 | D4/I6/J6/K6/L4/A3/G3/H3 |
| 扫荡编队肃清敌方空域 | D6 | F-15E(5-8) | 20.0 | 2.00 | 1 | 15.0 | D5 |
| 扫荡编队进行护航 | D7 | F-15E(5-8) | 20.0 | 0 | 0 | 20.0 | D6 |
| 扫荡编队返航 | D8 | F-15E(5-8) | 55.0 | 0 | 0 | 35.0 | D7/J9 |
| 扫荡编队着陆 | D9 | F-15E(5-8) | 4.0 | 0.10 | 0 | 4.0 | D8/H6 |
| 1号加油机飞向加油阵位 | E1 | KC-130T(1) | 23.5 | 0 | 1 | 19.0 | START |
| 1号加油机执行授油任务 | E2 | KC-130T(1) | 50.0 | 2.00 | 0 | 50.0 | E1/I3 |
| 1号加油机返航 | E3 | KC-130T(1) | 34.2 | 0 | 1 | 27.0 | E2/I4/J4 |
| 1号加油机着陆 | E4 | KC-130T(1) | 4.0 | 0.10 | 0 | 4.0 | E3/F4 |
| 2号加油机飞向加油阵位 | F1 | KC-130T(2) | 23.5 | 0 | 1 | 19.0 | START |
| 2号加油机执行授油任务 | F2 | KC-130T(2) | 50.0 | 2.00 | 0 | 50.0 | F1/K3 |
| 2号加油机返航 | F3 | KC-130T(2) | 34.2 | 0 | 1 | 27.0 | F2/K4 |
| 2号加油机着陆 | F4 | KC-130T(2) | 4.0 | 0.10 | 0 | 4.0 | F3 |
| E-8A滑跑 | G1 | E-8A | 2.0 | 0.05 | 0 | 2.0 | START |
| E-8A起飞 | G2 | E-8A | 0.5 | 0.02 | 0 | 0.5 | G1 |
| E-8A飞向监视阵位 | G3 | E-8A | 40.0 | 0 | 1 | 32.0 | G2 |
| 任务名称 | 任务 代号 | 任务执行单元 | 任务估计 时长/min | 时长 方差 | 任务可控性 | 最短任务 时长/min | 紧前任务 |
|---|---|---|---|---|---|---|---|
| E-8A对地监视 | G4 | E-8A | 50.0 | 0 | 0 | 50.0 | G3/B3 |
| E-8A返航 | G5 | E-8A | 40.0 | 0 | 1 | 32.0 | G4/J9 |
| E-8A着陆 | G6 | E-8A | 4.0 | 0.10 | 0 | 4.0 | G5/L8 |
| EC-130滑跑 | H1 | EC-130 | 2.0 | 0.05 | 0 | 2.0 | START |
| EC-130起飞 | H2 | EC-130 | 0.5 | 0.02 | 0 | 0.5 | H1 |
| EC-130飞向干扰阵位 | H3 | EC-130 | 48.3 | 0 | 1 | 1.0 | H2 |
| EC-130远程干扰 | H4 | EC-130 | 50.0 | 0 | 0 | 50.0 | H3 |
| EC-130返航 | H5 | EC-130 | 48.3 | 0 | 1 | 38.6 | H4/J9 |
| EC-130着陆 | H6 | EC-130 | 4.0 | 0.10 | 0 | 4.0 | H5/G6 |
| 压制编队滑跑 | I1 | 狂风IDS(1-4) | 2.0 | 0.05 | 0 | 2.0 | START |
| 压制编队起飞 | I2 | 狂风IDS(1-4) | 0.5 | 0.02 | 0 | 0.5 | I1/D2 |
| 压制编队飞向加油阵位 | I3 | 狂风IDS(1-4) | 18.0 | 0 | 1 | 14.4 | I2 |
| 压制编队加油 | I4 | 狂风IDS(1-4) | 19.0 | 0.50 | 0 | 19.0 | I3/E1 |
| 压制编队飞向集结阵位 | I5 | 狂风IDS(1-4) | 10.9 | 0 | 1 | 8.7 | I4 |
| 压制编队集结 | I6 | 狂风IDS(1-4) | 2.0 | 0.10 | 0 | 2.0 | D3/I5/J5/K5/L3 |
| 压制编队飞向压制阵位 | I7 | 狂风IDS(1-4) | 6.1 | 0 | 1 | 4.8 | I6/D5 |
| 压制编队进行压制 | I8 | 狂风IDS(1-4) | 20.0 | 0 | 0 | 20.0 | I7/D6 |
| 压制编队返航 | I9 | 狂风IDS(1-4) | 35.0 | 0 | 0 | 35.0 | I8/J9 |
| 压制编队着陆 | I10 | 狂风IDS(1-4) | 4.0 | 0.10 | 0 | 4.0 | I9/A6 |
| 打击1编队滑跑 | J1 | 狂风IDS(5-8) | 2.0 | 0.05 | 0 | 2.0 | START |
| 打击1编队起飞 | J2 | 狂风IDS(5-8) | 0.5 | 0.02 | 0 | 0.5 | J1 |
| 打击1编队飞向加油阵位 | J3 | 狂风IDS(5-8) | 20.7 | 0 | 1 | 17.0 | J2 |
| 打击1编队加油 | J4 | 狂风IDS(5-8) | 32.0 | 1.00 | 0 | 32.0 | J3/I4 |
| 打击1编队飞向集结阵位 | J5 | 狂风IDS(5-8) | 12.5 | 0 | 1 | 10.0 | J4 |
| 打击1编队集结 | J6 | 狂风IDS(5-8) | 2.0 | 0.10 | 0 | 2.0 | D3/I5/J5/K5/L3 |
| 打击1编队飞向压制阵位 | J7 | 狂风IDS(5-8) | 7.0 | 0 | 1 | 5.5 | J6/D5 |
| 打击1编队飞向打击阵位 | J8 | 狂风IDS(5-8) | 13.1 | 0 | 1 | 10.5 | J7/D6 |
| 打击1编队进行打击 | J9 | 狂风IDS(5-8) | 2.0 | 0.50 | 0 | 2.0 | J8 |
| 打击1编队返航 | J10 | 狂风IDS(5-8) | 63.5 | 0 | 0 | 40.0 | J9 |
| 打击1编队着陆 | J11 | 狂风IDS(5-8) | 4.0 | 0.10 | 0 | 4.0 | J10/D9 |
| 打击2编队滑跑 | K1 | F-15E(9-12) | 2.0 | 0.05 | 0 | 2.0 | START |
| 打击2编队起飞 | K2 | F-15E(9-12) | 0.5 | 0.02 | 0 | 0.5 | K1/J2 |
| 打击2编队飞向加油阵位 | K3 | F-15E(9-12) | 18.0 | 0 | 1 | 14.4 | K2 |
| 打击2编队加油 | K4 | F-15E(9-12) | 30.0 | 1.00 | 0 | 30.0 | K3/F1 |
| 打击2编队飞向集结阵位 | K5 | F-15E(9-12) | 10.9 | 0 | 1 | 8.3 | K4 |
| 打击2编队集结 | K6 | F-15E(9-12) | 2.0 | 0.10 | 0 | 2.0 | D3/I5/J5/K5/L3 |
| 打击2编队飞向压制阵位 | K7 | F-15E(9-12) | 6.1 | 0 | 1 | 4.8 | K6/D5 |
| 打击2编队飞向打击阵位 | K8 | F-15E(9-12) | 11.4 | 0 | 1 | 9.1 | K7/D6 |
| 打击2编队进行打击 | K9 | F-15E(9-12) | 2.0 | 0.50 | 0 | 2.0 | K8 |
| 任务名称 | 任务 代号 | 任务执行单元 | 任务估计 时长/min | 时长 方差 | 任务可控性 | 最短任务 时长/min | 紧前任务 |
|---|---|---|---|---|---|---|---|
| 打击2编队返航 | K10 | F-15E(9-12) | 62.0 | 0 | 0 | 62.0 | K9/J9 |
| 打击2编队着陆 | K11 | F-15E(9-12) | 4.0 | 0.10 | 0 | 4.0 | K10/J11 |
| 干扰编队滑跑 | L1 | EF-111A | 2.0 | 0.05 | 0 | 2.0 | START |
| 干扰编队起飞 | L2 | EF-111A | 0.5 | 0.02 | 0 | 0.5 | L1 |
| 干扰编队飞向集结阵位 | L3 | EF-111A | 28.9 | 0 | 1 | 1.0 | L2 |
| 干扰编队集结 | L4 | EF-111A | 2.0 | 0.10 | 0 | 2.0 | D3/I5/J5/K5/L3 |
| 干扰编队飞向干扰阵位 | L5 | EF-111A | 6.1 | 0 | 1 | 1.0 | L4/D5 |
| 干扰编队进行干扰 | L6 | EF-111A | 20.0 | 0 | 0 | 20.0 | L5/D6 |
| 干扰编队返航 | L7 | EF-111A | 35.0 | 0 | 1 | 28.0 | L6/J9 |
| 干扰编队着陆 | L8 | EF-111A | 4.0 | 0.10 | 0 | 4.0 | L7/I10 |
| 任务完成 | Finish | 0 | 0 | 0 | 0 | A6/B6/C6D9/ E4/F4G6/H6/I9 J11/K11/L8 |

Fig.18
Network planning diagram based on scenario mission schedule planning
Table 5
Plan fuel consumption of small aircraft
| 编队/飞机 | 总油量/kg | 耗油量/kg | 加油量/kg | 剩余油量/kg |
|---|---|---|---|---|
| 护航1编队 | 13 972.0 | 10 766.4 | 0 | 3 205.6 |
| 护航2编队 | 13 972.0 | 12 013.2 | 0 | 1 958.8 |
| 扫荡编队 | 13 972.0 | 12 344.4 | 0 | 1 627.6 |
| 打击1编队 | 7 060.0 | 11 447.0 | 4 800.0 | 413.0 |
| 打击2编队 | 13 972.0 | 12 821.1 | 4 500.0 | 5 650.9 |
| 压制编队 | 7 060.0 | 6 892.2 | 2 850.0 | 3 017.8 |
| 干扰编队 | 15 200.0 | 8 139.0 | 0 | 7 061.0 |

Fig.19
Mission schedule diagram without disturbance

Fig.20
Mission schedule diagram with disturbances but without control

Fig.21
Mission schedule diagram with disturbances and applied control

Fig.22
Mission schedule diagram with disturbances and applied control
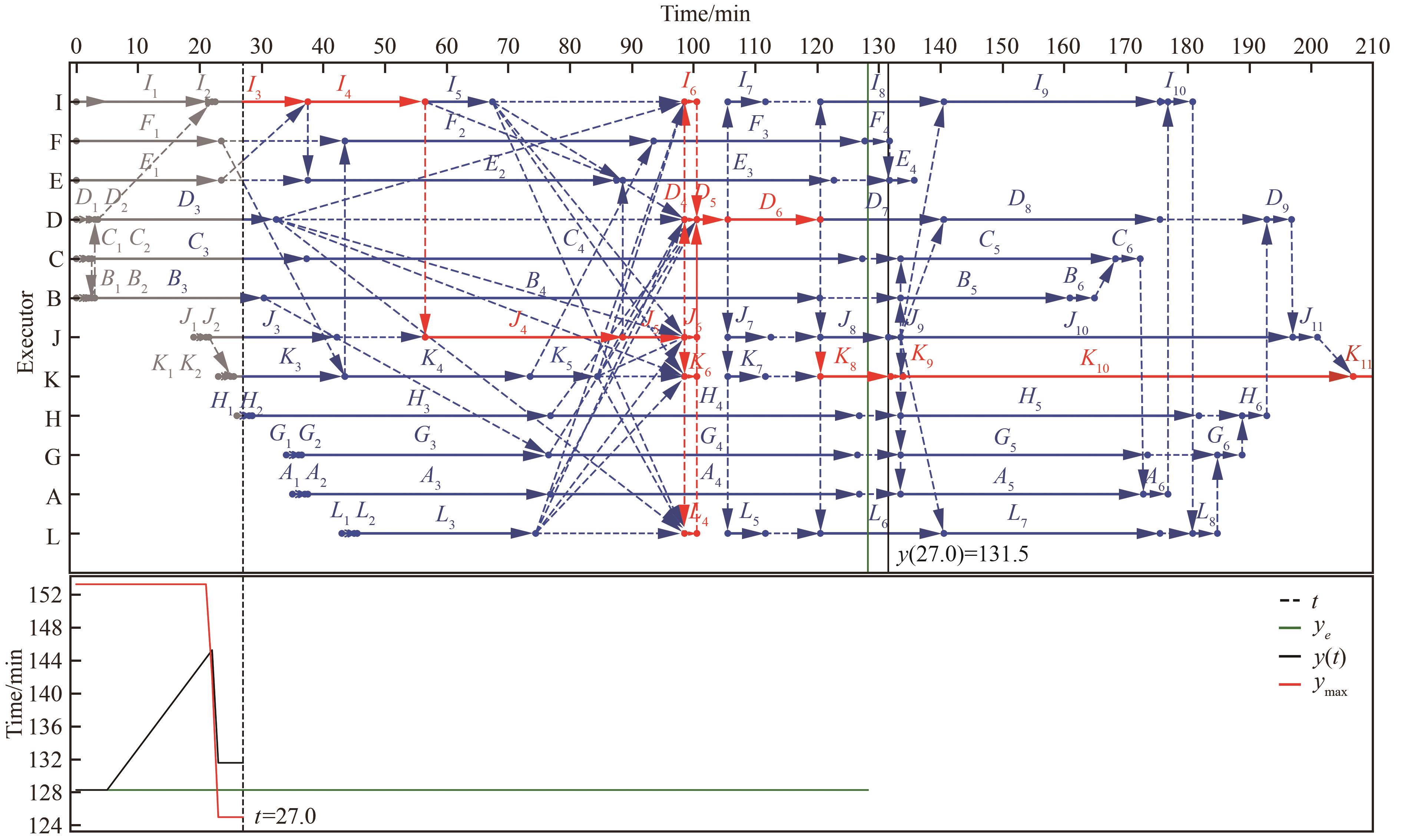
Table A1
Mission schedule and network parameters
| 任务名称 | 最早开始时刻/min | 最晚开始时刻/min | 最早结束时刻/min | 最晚结束时刻/min | 总时差/min | 单时差/min | 计划开始时刻/min | 计划结束时刻/min | 关键 任务 |
|---|---|---|---|---|---|---|---|---|---|
| 侦察机滑跑 | 0 | 2.0 | 47.2 | 49.2 | 12.2 | 0 | 35.0 | 37.0 | 0 |
| 侦察机起飞 | 2.0 | 2.5 | 49.2 | 49.7 | 12.2 | 0 | 37.0 | 37.5 | 0 |
| 侦察机飞向侦察阵位 | 2.5 | 41.8 | 49.7 | 89.0 | 12.2 | 0 | 37.5 | 76.8 | 0 |
| 侦察机执行侦察任务 | 41.8 | 91.8 | 113.8 | 163.8 | 37.0 | 3.4 | 76.8 | 126.8 | 0 |
| 侦察机返航 | 91.8 | 131.1 | 163.8 | 203.1 | 33.6 | 0 | 130.2 | 169.5 | 0 |
| 侦察机着陆 | 131.1 | 135.1 | 203.1 | 207.1 | 33.6 | 33.6 | 169.5 | 173.5 | 0 |
| 护航1编队滑跑 | 0 | 2.0 | 2.0 | 4.0 | 2.0 | 0.5 | 0 | 2.0 | 0 |
| 护航1编队起飞 | 2.0 | 2.5 | 4.0 | 4.5 | 1.5 | 0 | 2.5 | 3.0 | 0 |
| 护航1编队飞向巡逻阵位 | 2.5 | 29.9 | 58.3 | 85.7 | 55.3 | 0 | 3.0 | 30.4 | 0 |
| 护航1编队进行护航 | 29.9 | 119.9 | 85.7 | 175.7 | 55.3 | 9.8 | 30.4 | 120.4 | 0 |
| 护航1编队返航 | 130.2 | 157.6 | 175.7 | 203.1 | 45.5 | 0 | 130.2 | 157.6 | 0 |
| 护航1编队着陆 | 157.6 | 161.6 | 203.1 | 207.1 | 45.5 | 45.5 | 157.6 | 161.6 | 0 |
| 护航2编队滑跑 | 0 | 2.0 | 1.5 | 3.5 | 1.5 | 0 | 0 | 2.0 | 0 |
| 护航2编队起飞 | 2.0 | 2.5 | 3.5 | 4.0 | 1.5 | 0 | 2.0 | 2.5 | 0 |
| 护航2编队飞向巡逻阵位 | 2.5 | 37.3 | 43.5 | 78.3 | 41.0 | 0 | 2.5 | 37.3 | 0 |
| 护航2编队进行护航 | 37.3 | 127.3 | 78.3 | 168.3 | 41.0 | 2.9 | 37.3 | 127.3 | 0 |
| 护航2编队返航 | 130.2 | 165.0 | 168.3 | 203.1 | 38.1 | 0 | 130.2 | 165.0 | 0 |
| 护航2编队着陆 | 165.0 | 169.0 | 203.1 | 207.1 | 38.1 | 38.1 | 165.0 | 169.0 | 0 |
| 扫荡编队滑跑 | 0 | 2.0 | 2.5 | 4.5 | 2.5 | 1.0 | 0 | 2.0 | 0 |
| 扫荡编队起飞 | 2.5 | 3.0 | 4.5 | 5.0 | 1.5 | 0 | 3.0 | 3.5 | 0 |
| 扫荡编队飞向集结阵位 | 3.0 | 31.9 | 58.1 | 87.0 | 54.6 | 54.6 | 3.5 | 32.4 | 0 |
| 扫荡编队集结 | 87.0 | 89.0 | 87.0 | 89.0 | 0 | 0 | 87.0 | 89.0 | 1 |
| 扫荡编队飞向扫荡阵位 | 89.0 | 95.1 | 89.0 | 95.1 | 0 | 0 | 89.0 | 95.1 | 1 |
| 扫荡编队肃清敌方空域 | 95.1 | 115.1 | 95.1 | 115.1 | 0 | 0 | 95.1 | 115.1 | 1 |
| 扫荡编队进行护航 | 115.1 | 135.1 | 148.1 | 168.1 | 33.0 | 0 | 115.1 | 135.1 | 0 |
| 扫荡编队返航 | 135.1 | 190.1 | 168.1 | 203.1 | 33.0 | 0 | 135.1 | 190.1 | 0 |
| 扫荡编队着陆 | 190.1 | 194.1 | 203.1 | 207.1 | 33.0 | 33.0 | 190.1 | 194.1 | 0 |
| 1号加油机飞向加油阵位 | 0 | 23.5 | 0 | 23.5 | 0 | 0 | 0 | 23.5 | 1 |
| 1号加油机执行授油任务 | 23.5 | 73.5 | 118.9 | 168.9 | 95.4 | 1.0 | 23.5 | 73.5 | 0 |
| 1号加油机返航 | 74.5 | 108.7 | 168.9 | 203.1 | 94.4 | 0 | 74.5 | 108.7 | 0 |
| 1号加油机着陆 | 108.7 | 112.7 | 203.1 | 207.1 | 94.4 | 94.4 | 111.7 | 115.7 | 0 |
| 2号加油机飞向加油阵位 | 0 | 23.5 | 22.6 | 46.1 | 22.6 | 0 | 0 | 23.5 | 0 |
| 2号加油机执行授油任务 | 43.5 | 73.5 | 118.9 | 168.9 | 95.4 | 0 | 43.5 | 73.5 | 0 |
| 2号加油机返航 | 73.5 | 107.7 | 168.9 | 203.1 | 95.4 | 0 | 73.5 | 107.7 | 0 |
| 2号加油机着陆 | 107.7 | 111.7 | 203.1 | 207.1 | 95.4 | 95.4 | 107.7 | 111.7 | 0 |
| E-8A滑跑 | 0 | 2.0 | 46.5 | 48.5 | 12.5 | 0 | 34.0 | 36.0 | 0 |
| E-8A起飞 | 2.0 | 2.5 | 48.5 | 49.0 | 12.5 | 0 | 36.0 | 36.5 | 0 |
| E-8A飞向监视阵位 | 2.5 | 42.5 | 49.0 | 89.0 | 12.5 | 0 | 36.5 | 76.5 | 0 |
| E-8A对地监视 | 42.5 | 92.5 | 113.1 | 163.1 | 36.6 | 3.7 | 76.5 | 126.5 | 0 |
| E-8A返航 | 130.2 | 170.2 | 163.1 | 203.1 | 32.9 | 0 | 130.2 | 170.2 | 0 |
| E-8A着陆 | 170.2 | 174.2 | 203.1 | 207.1 | 32.9 | 32.9 | 181.5 | 185.5 | 0 |
| EC-130滑跑 | 0 | 2.0 | 38.2 | 40.2 | 12.2 | 0 | 26.0 | 28.0 | 0 |
| EC-130起飞 | 2.0 | 2.5 | 40.2 | 40.7 | 12.2 | 0 | 28.0 | 28.5 | 0 |
| EC-130飞向干扰阵位 | 2.5 | 50.8 | 40.7 | 89.0 | 12.2 | 0 | 28.5 | 76.8 | 0 |
| EC-130远程干扰 | 50.8 | 100.8 | 104.8 | 154.8 | 28.0 | 3.4 | 76.8 | 126.8 | 0 |
| EC-130返航 | 130.2 | 178.5 | 154.8 | 203.1 | 24.6 | 0 | 130.2 | 178.5 | 0 |
| EC-130着陆 | 178.5 | 182.5 | 203.1 | 207.1 | 24.6 | 24.6 | 185.5 | 189.5 | 0 |
| 压制编队滑跑 | 0 | 2.0 | 3.0 | 5.0 | 3.0 | 1.5 | 0 | 2.0 | 0 |
| 压制编队起飞 | 3.0 | 3.5 | 5.0 | 5.5 | 1.5 | 0 | 3.5 | 4.0 | 0 |
| 压制编队飞向加油阵位 | 3.5 | 21.5 | 5.5 | 23.5 | 1.5 | 1.5 | 4.0 | 22.0 | 0 |
| 压制编队加油 | 23.5 | 42.5 | 23.5 | 42.5 | 0 | 0 | 23.5 | 42.5 | 1 |
| 压制编队飞向集结阵位 | 42.5 | 53.4 | 76.1 | 87.0 | 33.6 | 33.6 | 42.5 | 53.4 | 0 |
| 压制编队集结 | 87.0 | 89.0 | 87.0 | 89.0 | 0 | 0 | 87.0 | 89.0 | 1 |
| 压制编队飞向压制阵位 | 95.1 | 101.2 | 142.0 | 148.1 | 46.9 | 13.9 | 95.1 | 101.2 | 0 |
| 压制编队进行压制 | 115.1 | 135.1 | 148.1 | 168.1 | 33.0 | 0 | 115.1 | 135.1 | 0 |
| 压制编队返航 | 135.1 | 170.1 | 168.1 | 203.1 | 33.0 | 0 | 135.1 | 170.1 | 0 |
| 压制编队着陆 | 170.1 | 174.1 | 203.1 | 207.1 | 33.0 | 33.0 | 173.5 | 177.5 | 0 |
| 打击1编队滑跑 | 0 | 2.0 | 19.3 | 21.3 | 0.3 | 0 | 19.0 | 21.0 | 0 |
| 打击1编队起飞 | 2.0 | 2.5 | 21.3 | 21.8 | 0.3 | 0 | 21.0 | 21.5 | 0 |
| 打击1编队飞向加油阵位 | 2.5 | 23.2 | 21.8 | 42.5 | 0.3 | 0.3 | 21.5 | 42.2 | 0 |
| 打击1编队加油 | 42.5 | 74.5 | 42.5 | 74.5 | 0 | 0 | 42.5 | 74.5 | 1 |
| 打击1编队飞向集结阵位 | 74.5 | 87.0 | 74.5 | 87.0 | 0 | 0 | 74.5 | 87.0 | 1 |
| 打击1编队集结 | 87.0 | 89.0 | 87.0 | 89.0 | 0 | 0 | 87.0 | 89.0 | 1 |
| 打击1编队飞向压制阵位 | 95.1 | 102.1 | 108.1 | 115.1 | 13.0 | 13.0 | 95.1 | 102.1 | 0 |
| 打击1编队飞向打击阵位 | 115.1 | 128.2 | 115.1 | 128.2 | 0 | 0 | 115.1 | 128.2 | 1 |
| 打击1编队进行打击 | 128.2 | 130.2 | 128.2 | 130.2 | 0 | 0 | 128.2 | 130.2 | 1 |
| 打击1编队返航 | 130.2 | 193.7 | 139.6 | 203.1 | 9.4 | 0 | 130.2 | 193.7 | 0 |
| 打击1编队着陆 | 193.7 | 197.7 | 203.1 | 207.1 | 9.4 | 9.4 | 194.1 | 198.1 | 0 |
| 打击2编队滑跑 | 0 | 2.0 | 25.6 | 27.6 | 2.6 | 0 | 23.0 | 25.0 | 0 |
| 打击2编队起飞 | 25.0 | 25.5 | 27.6 | 28.1 | 2.6 | 0 | 25.0 | 25.5 | 0 |
| 打击2编队飞向加油阵位 | 2.5 | 20.5 | 28.1 | 46.1 | 2.6 | 0 | 25.5 | 43.5 | 0 |
| 打击2编队加油 | 23.5 | 53.5 | 46.1 | 76.1 | 2.6 | 0 | 43.5 | 73.5 | 0 |
| 打击2编队飞向集结阵位 | 53.5 | 64.4 | 76.1 | 87.0 | 2.6 | 2.6 | 73.5 | 84.4 | 0 |
| 打击2编队集结 | 87.0 | 89.0 | 87.0 | 89.0 | 0 | 0 | 87.0 | 89.0 | 1 |
| 打击2编队飞向压制阵位 | 95.1 | 101.2 | 110.7 | 116.8 | 15.6 | 13.9 | 95.1 | 101.2 | 0 |
| 打击2编队飞向打击阵位 | 115.1 | 126.5 | 116.8 | 128.2 | 1.7 | 0 | 115.1 | 126.5 | 0 |
| 打击2编队进行打击 | 126.5 | 128.5 | 128.2 | 130.2 | 1.7 | 1.7 | 126.5 | 128.5 | 0 |
| 打击2编队返航 | 130.2 | 203.1 | 130.2 | 203.1 | 0 | 0 | 130.2 | 203.1 | 1 |
| 打击2编队着陆 | 203.1 | 207.1 | 203.1 | 207.1 | 0 | 0 | 203.1 | 207.1 | 1 |
| 干扰编队滑跑 | 0 | 2.0 | 55.6 | 57.6 | 12.6 | 0 | 43.0 | 45.0 | 0 |
| 干扰编队起飞 | 2.0 | 2.5 | 57.6 | 58.1 | 12.6 | 0 | 45.0 | 45.5 | 0 |
| 干扰编队飞向集结阵位 | 2.5 | 31.4 | 58.1 | 87.0 | 12.6 | 12.6 | 45.5 | 74.4 | 0 |
| 干扰编队集结 | 87.0 | 89.0 | 87.0 | 89.0 | 0 | 0 | 87.0 | 89.0 | 1 |
| 干扰编队飞向干扰阵位 | 95.1 | 101.2 | 142.0 | 148.1 | 46.9 | 13.9 | 95.1 | 101.2 | 0 |
| 干扰编队进行干扰 | 115.1 | 135.1 | 148.1 | 168.1 | 33.0 | 0 | 115.1 | 135.1 | 0 |
| 干扰编队返航 | 135.1 | 170.1 | 168.1 | 203.1 | 33.0 | 0 | 135.1 | 170.1 | 0 |
| 干扰编队着陆 | 170.1 | 174.1 | 203.1 | 207.1 | 33.0 | 33.0 | 177.5 | 181.5 | 0 |
| 任务完成 | 207.1 | 207.1 | 207.1 | 207.1 | 0 | 0 | 207.1 | 207.1 | 0 |
| [1] | 雷洪涛, 朱承, 王琛, 等. 联合作战行动跨域协同计划与控制关键技术[J]. 指挥与控制学报, 2023, 9(4): 361-371. |
| LEI H T, ZHU C, WANG C, et al. Key technologies of planning and control for cross-domain coordination on joint operational actions[J]. Journal of Command and Control, 2023, 9(4): 361-371 (in Chinese). | |
| [2] | 韩光松, 宋志峰, 王忠. 基于经典控制思想的联合作战指挥与控制[J]. 指挥与控制学报, 2022, 8(1): 90-94. |
| HAN G S, SONG Z F, WANG Z. Joint operation command and control via classical control thought[J]. Journal of Command and Control, 2022, 8(1): 90-94 (in Chinese). | |
| [3] | 吴傲, 李寰宇, 高杨军, 等. 面向巡逻阵位保持的空中加油管理时空协同方法[J]. 航空学报, 2023, 44(20): 628438. |
| WU A, LI H Y, GAO Y J, et al. Time-space coordination method for air refueling management for combat air patrol position maintenance[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628438 (in Chinese). | |
| [4] | 马国丰, 陈强. 项目进度管理的研究现状及其展望[J]. 上海管理科学, 2006, 28(4): 70-74. |
| MA G F, CHEN Q. Study on project scheduling management[J]. Shanghai Management Science, 2006, 28(4): 70-74 (in Chinese). | |
| [5] | DAVIS E W. Project scheduling under resource constraints: Historical review and categorization of procedures[J]. A I I E Transactions, 1973, 5(4): 297-313. |
| [6] | LEVCHUK G M, LEVCHUK Y N, LUO J, et al. Normative design of organizations. I. mission planning[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 2002, 32(3): 346-359. |
| [7] | 薛维锐. 面向协同施工的工程项目进度管理研究[D]. 哈尔滨: 哈尔滨工业大学, 2015: 1-45. |
| XUE W R. Research on project schedule management oriented to collaborative construction[D]. Harbin: Harbin Institute of Technology, 2015: 1-45 (in Chinese). | |
| [8] | 陈芳, 王珍, 田相林. 基于计划评审技术的生产进度评估方法[J]. 兵器装备工程学报, 2016, 37(8): 177-180. |
| CHEN F, WANG Z, TIAN X L. A production schedule evaluation method based on program evaluation and review technique[J]. Journal of Ordnance Equipment Engineering, 2016, 37(8): 177-180 (in Chinese). | |
| [9] | 胡杨博, 莫蓉, 常智勇, 等. 基于工作分解结构复杂多级项目的进度监控技术研究[J]. 现代制造工程, 2008(2): 16-19. |
| HUYANG B, MO R, CHANG Z Y, et al. Research on schedule monitoring technology for the complex multilevel project based on WBS[J]. Modern Manufacturing Engineering, 2008(2): 16-19 (in Chinese). | |
| [10] | SAPUTRA P D, FANSURI M H, LAKSMI A A. Development of work breakdown structure (WBS) for rapid damage runway repair (RADARR) time planning at military airbases[J]. E3S Web of Conferences, 2024, 517: 05002. |
| [11] | 管胤, 杜晓亮. 供应链管理环境下的生产计划管理研究[J]. 现代工业经济和信息化, 2023, 13(10): 236-238, 241. |
| GUAN Y, DU X L. Research on production planning management in supply chain management environment[J]. Modern Industrial Economy and Informationization, 2023, 13(10): 236-238, 241 (in Chinese). | |
| [12] | 杨雪娟. 基于多级挣值法航天型号产品生产进度控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2015: 1-38. |
| YANG X J. Research on production schedule control of aerospace products based on multi-level earned value method[D]. Harbin: Harbin Engineering University, 2015: 1-38 (in Chinese). | |
| [13] | 张妍. 改进挣值法在道路施工项目成本控制中的应用[J]. 工程造价管理, 2024(2): 69-75. |
| ZHANG Y. Application of improved earned value method in cost control of road construction projects[J]. Engineering Cost Management, 2024(2): 69-75 (in Chinese). | |
| [14] | 李善梅, 胡锦标, 许思莹, 等. 考虑航班重分配的航班计划网络鲁棒性评估[J]. 南京航空航天大学学报, 2023, 55(6): 1044-1054. |
| LI S M, HU J B, XU S Y, et al. Evaluation of flight plan robustness based on flight redistribution[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2023, 55(6): 1044-1054 (in Chinese). | |
| [15] | QU J Y, WU S X, ZHANG J J. Flight delay propagation prediction based on deep learning[J]. Mathematics, 2023, 11(3): 494. |
| [16] | WEI X J, LI Y F, SHANG R R, et al. Airport cluster delay prediction based on TS-BiLSTM-attention[J]. Aerospace, 2023, 10(7): 580. |
| [17] | 董兵, 彭自琛. 资源受限条件下受扰航班恢复研究[J]. 舰船电子工程, 2024, 44(4): 51-56. |
| DONG B, PENG Z C. Irregular flight recovery under resource restriction[J]. Ship Electronic Engineering, 2024, 44(4): 51-56 (in Chinese). | |
| [18] | 王武华, 栾姗迟. 作战计划管理关键技术研究[J]. 电脑知识与技术, 2010, 6(17): 4841-4844. |
| WANG W H, LUAN S C. The crucial technology research of operational plan management[J]. Computer Knowledge and Technology, 2010, 6(17): 4841-4844 (in Chinese). | |
| [19] | 张迎新. 不确定环境下军事任务计划建模与优化方法研究[D]. 长沙: 国防科学技术大学, 2014: 1-35. |
| ZHANG Y X. Research on modeling and optimization method of military mission plan in uncertain environment[D]. Changsha: National University of Defense Technology, 2014: 1-35 (in Chinese). | |
| [20] | 陈行军, 齐欢, 阳东升. 含时间窗联合作战计划问题的建模与求解[J]. 系统工程理论与实践, 2012, 32(9): 1979-1985. |
| CHEN X J, QI H, YANG D S. Modeling and solution of joint operational plans with time windows[J]. Systems Engineering-Theory & Practice, 2012, 32(9): 1979-1985 (in Chinese). | |
| [21] | 孙鹏, 陈冠宇, 张杰勇, 等. 基于突发事件的任务计划动态调整模型及算法[J]. 控制与决策, 2020, 35(5): 1052-1062. |
| SUN P, CHEN G Y, ZHANG J Y, et al. Dynamic task plan adjustment model and algorithm based on battlefield emergencies[J]. Control and Decision, 2020, 35(5): 1052-1062 (in Chinese). | |
| [22] | 邵天浩, 张宏军, 程恺, 等. 层次任务网络中的重新规划研究综述[J]. 系统工程与电子技术, 2020, 42(12): 2833-2846. |
| SHAO T H, ZHANG H J, CHENG K, et al. Review of replanning in hierarchical task network[J]. Systems Engineering and Electronics, 2020, 42(12): 2833-2846 (in Chinese). | |
| [23] | 吴瑞杰, 孙鹏, 孙昱. 分布式任务计划动态调整模型及算法[J]. 系统工程与电子技术, 2017, 39(2): 322-328. |
| WU R J, SUN P, SUN Y. Distributed dynamic task plan adjustment model and algorithm[J]. Systems Engineering and Electronics, 2017, 39(2): 322-328 (in Chinese). | |
| [24] | 王小军, 张修社, 胡小全, 等. 跨域作战要素协同中的联合行动控制概念浅析[J]. 现代导航, 2021, 12(4): 235-241. |
| WANG X J, ZHANG X S, HU X Q, et al. Brief analysis of concept of joint actions control in synergy of cross-domain operational elements[J]. Modern Navigation, 2021, 12(4): 235-241 (in Chinese). | |
| [25] | 杨新民, 于靖, 陈杨, 等. 基于流程引擎的作战管理系统设计[J]. 指挥信息系统与技术, 2024, 15(2): 21-27. |
| YANG X M, YU J, CHEN Y, et al. Design of battle management system based on workflow engine[J]. Command Information System and Technology, 2024, 15(2): 21-27 (in Chinese). | |
| [26] | 方冰, 王政伟, 陈奡, 等. 智能化作战管理技术[J]. 指挥信息系统与技术, 2023, 14(3): 18-24, 45. |
| FANG B, WANG Z W, CHEN A, et al. Technology for intelligent battle management[J]. Command Information System and Technology, 2023, 14(3): 18-24, 45 (in Chinese). | |
| [27] | Air Force U.S.. CounterAir Operations: AFDP 3-01 [R]. Washington, DC: U.S. Air Force, 2023. |
| [28] | 王兴虎, 程家林, 郭强, 等. 防空压制任务中的智能协同作战体系研究[J]. 无人系统技术, 2020, 3(4): 10-21. |
| WANG X H, CHENG J L, GUO Q, et al. Research on intelligent cooperative combat system in air denfense suppression mission[J]. Unmanned Systems Technology, 2020, 3(4): 10-21 (in Chinese). | |
| [29] | 王硕, 曹莉敏, 尚民强, 等. 甘特图在大型软件研发项目管理中的应用[J]. 石油地球物理勘探, 2018, 53(): 310-315. |
| WANG S, CAO L M, SHANG M Q, et al. Gantt chart in large-scale software development management[J]. Oil Geophysical Prospecting, 2018, 53(S1): 310-315 (in Chinese). | |
| [30] | 王众托,汪克夷.一种新的网络计划法——决策关键路法[J].系统工程理论与实践, 1981, 1(1): 50-61. |
| WANG Z T, WANG K Y. A new network planning method: Decision critical path method[J]. Systems Engineering-Theory and Practice, 1981,1(1):50-61 (in Chinese). | |
| [31] | 关雷, 佟士祺, 颜华琨, 等. 基于群体网络计划的应急协同决策方法[J]. 大连海事大学学报, 2012, 38(3): 73-76. |
| GUAN L, TONG S Q, YAN H K, et al. Emergency collaborative decision-making method based on group decision network planning[J]. Journal of Dalian Maritime University, 2012, 38(3): 73-76 (in Chinese). | |
| [32] | MALCOLM D G, ROSEBOOM J H, CLARK C E, et al. Application of a technique for research and development program evaluation[J]. Operations Research, 1959, 7(5): 646-669. |
| [1] | Rongzu LI, Li LIU, Dun YANG. Optimal design of hydrogen-powered UAV based on multi-source domain fusion surrogate model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 630979-630979. |
| [2] | Weiwei CAI, Guohua WU, Hengwei LI, Qian YIN. Multi-objective scheduling optimization method for relay satellites considering user preferences [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331074-331074. |
| [3] | Yifan WANG, Xiyun GUO, Shiyuan JIA, Gang CHEN, Mo REN. Configuration optimization method of three-branch robot for truss holding [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(7): 431033-431033. |
| [4] | Yuxin CUI, Zhong LU, Jia ZHOU. Development assurance level assignment based on multi-objective artificial hummingbird algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330946-330946. |
| [5] | Chengjun SHAN, Tianyu GONG, Lizhe YI, Haohui YANG, Yaosong LONG. High-efficiency and high-reliability sonic boom/aerodynamic multidisciplinary optimization method for supersonic civil aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(24): 630573-630573. |
| [6] | Hengwei LI, Qizhang LUO, Yi GU, Caizhi FAN, Guohua WU. Multi⁃objective dynamic scheduling optimization method for relay satellites based on rolling horizon strategy [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 329706-329706. |
| [7] | Qian YANG, Haoran ZHENG, Xianda CHENG, Wei DONG. Optimization design method for hot air anti⁃icing system based on bleed air control [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729285-729285. |
| [8] | Jiezhong DONG, Wuli CHU, Haoguang ZHANG, Bo LUO, Song YAN. Flow control mechanism of diffuser cascade with wavy leading⁃edge based on causal network analysis [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 128336-128336. |
| [9] | Chao LIANG, Li YANG, Chengsheng PAN, Yaowen QI. Multi-QoS constraints routing algorithm based on satellite network dynamic resource graph [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 326422-326422. |
| [10] | ZOU Ziyuan, CHEN Qifeng. Decision tree-based target assignment for confrontation of multiple space vehicles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S1): 726910-726910. |
| [11] | SUN Gang, PENG Shuang, CHEN Hao, WU Jiangjiang, LI Jun. Multi-objective optimization method oriented to integrated scenario of TT & C resources and data transmission resources [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 326114-326114. |
| [12] | ZHENG Shuai, WANG Zihan, ZHAO Haoran, YANG Pengtao, HONG Jun. Layout optimization method of aircraft fuel gauging sensor based on differential evolution algorithm [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 125809-125809. |
| [13] | JING Tao, TIAN Xitian. Multi-objective optimization method for aircraft tolerance allocation based on Monte Carlo-adaptive differential evolution algorithm [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(3): 425278-425278. |
| [14] | LUO Qing, ZHANG Tao, SHAN Peng, ZHANG Wentao, LIU Zihao. Generating reconfiguration blueprints for IMA systems based on improved Q-learning [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(8): 525792-525792. |
| [15] | ZHANG Junfeng, YOU Lubao, YANG Chunwei, HU Rong. Arrival sequencing and scheduling based on multi-objective Imperialist competitive algorithm [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(6): 324439-324439. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341