航空学报
2024, 45 (
):
530611-530611.
10.7527/S1000-6893.2024.30611
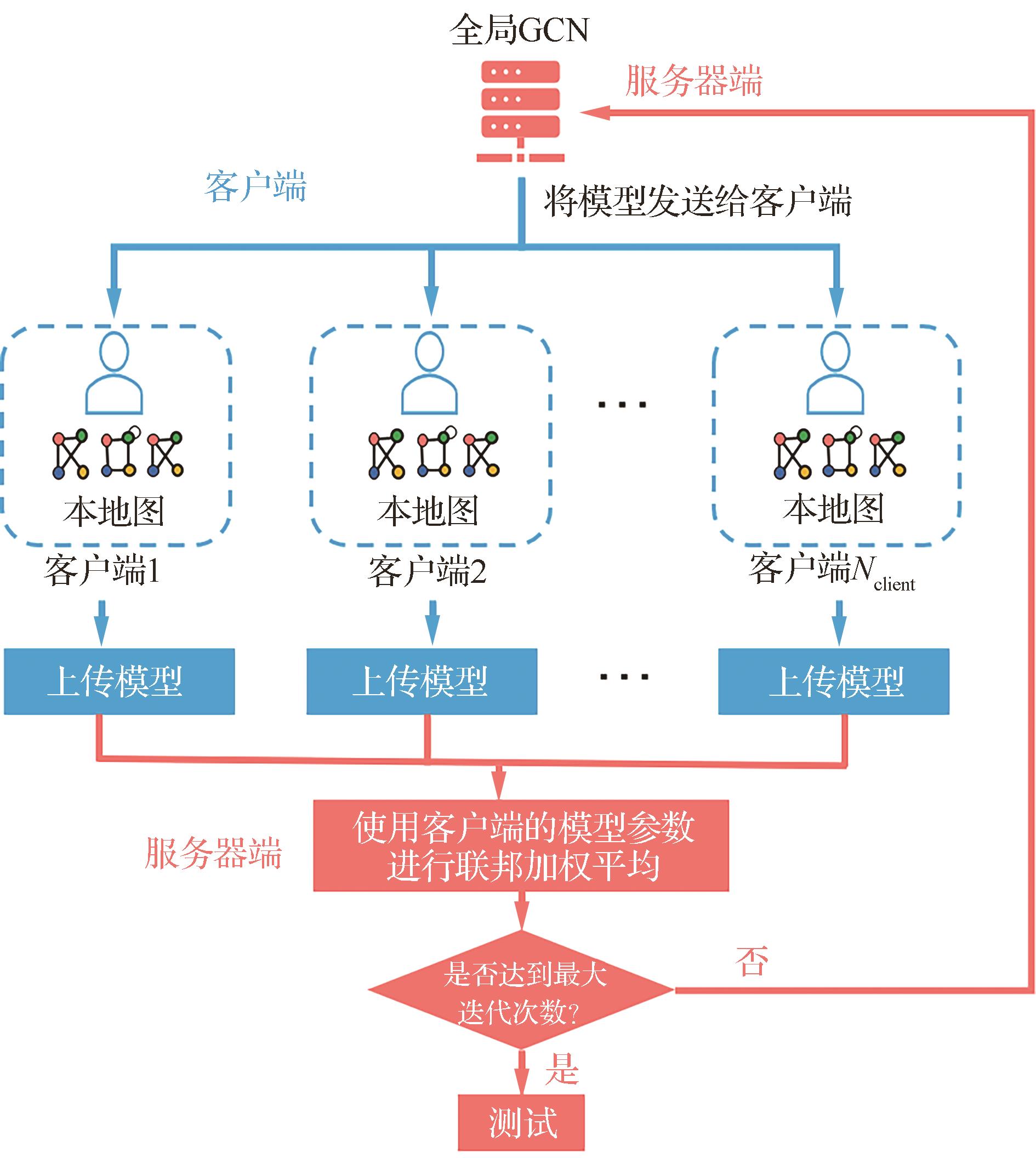
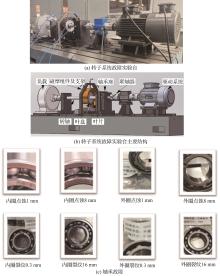
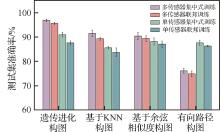
转子系统运行环境恶劣、多源监测数据融合困难且易产生数据孤岛现象,对转子系统健康监测带来巨大挑战。本文提出了基于遗传进化构图的联邦图卷积神经网络(FGCN)转子系统故障诊断方法。首先,利用联邦学习和图神经网络,构建联邦图网络框架,通过在每个本地客户端上进行局部模型训练,并通过联邦加权平均算法聚合这些局部模型得到全局模型,这种数据不动、模型动的方式,不仅实现了数据的本地化处理,还确保了模型参数的安全与隐私;此外,为了解决多源传感器数据融合自适应差的问题,提出了遗传进化构图方法,该方法通过模拟生物进化过程中的自然选择和遗传变异机制,在训练过程中自动调整图结构节点之间的连接关系和权重;极大地提高了多源传感器构图的自适应性和灵活性,进而提升故障诊断的准确性。最后,通过在转子故障实验台数据集上进行验证,实验结果表明,所提出的方法能够更充分利用多传感器监测数据,在客户端包含故障种类数量不同的诊断场景中达到了95%以上的故障诊断准确率。





{kind=link}